МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
Запорізький національний технічний університет
МЕТОДИЧНІ ВКАЗІВКИ ТА ЗАВДАННЯ
до самостійних робіт
з курсу
„Теорія керування”
для студентів напряму підготовки 6.040303 „Системний аналіз”
галузі знань 0403 „Системні науки та кібернетика”
денної форми навчання
2008
2
Методичні вказівки та завдання до самостійних робіт з курсу
„Теорія керування” для студентів напряму підготовки 6.040303
„Системний аналіз” галузі знань 0403 „Системні науки та
кібернетика” денної форми навчання /Укл.:А.В.Савранська,
О.В.Корнєєва, А.О.Кузьменко. – Запоріжжя: ЗНТУ,2008. – 54с.
Методичні вказівки містять теоретичні відомості, індивідуальні
завдання до самостійних робіт та приклади їх виконання з курсу
„Теорія керування” для студентів напряму підготовки 6.040303
„Системний аналіз” галузі знань 0403 „Системні науки та
кібернетика” денної форми навчання.
Укладачі: А.В. Савранська, доцент,
О.В. Корнєєва, асистент,
А.О. Кузьменко, ст. лаборант.
Рецензенти: В.П. Пінчук, доцент,
О.І. Денисенко, доцент.
Відповідальний
за випуск Г.В. Корніч, професор.
Затверджено
на засіданні кафедри
системного аналізу та
обчислювальної математики
протокол № 10 від 25.06.08 р.
3
ЗМІСТ
1 Лабораторна робота №1 Операційний метод і його застосування до
розв’язання диференційних рівнянь……..................................................4
1.1 Мета роботи......................................................................................4
1.2 Перетворення Лапласа і його основні властивості.......................4
1.3 Лінійні диференційні рівняння зі сталими коефіцієнтами..........7
1.4 Системи лінійних диференційних рівнянь....................................8
1.5 Варіанти самостійних завдань......................................................10
1.6 Приклади розв’язання задач.........................................................15
2 Лабораторна робота №2 Опис об’єктів у просторі станів.
Передавальні функції. Структурні схеми представлення систем
керування...................................................................................................18
2.1 Загальні відомості..........................................................................18
2.2 Варіанти самостійних завдань......................................................24
2.3 Приклад розв’язання задачі..........................................................27
3 Лабораторна робота №3 Керованість. Побудова ідентифікаторів....31
3.1 Загальні відомості..........................................................................31
3.2 Варіанти самостійних завдань......................................................34
3.3 Приклад розв’язання задачі..........................................................38
4 Лабораторна робота №4 Спостережуваність. Побудова
ідентифікаторів..........................................................................................43
4.1 Загальні відомості..........................................................................43
4.2 Варіанти самостійних завдань......................................................46
4.3 Приклад розв’язання задачі...........................................................51
5 Рекомендована література.....................................................................54
4
1 ЛАБОРАТОРНА РОБОТА № 1
Операційний метод і його застосування до розв’язання
диференційних рівнянь
1.1 Мета роботи
Дана робота допоможе вивчити операційний метод і його
застосування до розв’язання диференційних рівнянь.
1.2 Перетворення Лапласа і його основні властивості
Функцією-оригіналом називається комплекснозначна функція
дійсної змінної f t , яка задовольняє наступним умовам:
а) f t 0 , якщо t 0 ;
б) f t неперервна разом зі своїми похідними достатньо
високого порядку на всій вісі t , окрім окремих точок, в яких f t або
її похідні мають розрив першого роду, причому на кожному кінцевому
інтервалі вісі t є лише кінцеве число таких точок;
зі зростанням t модуль функції f t зростає не швидше ніж
деяка показникова функція, тобто існують числа M 0 і s 0 0 такі,
що для всіх t
f t Me s0 t
(1.1)
Число s 0 називається показником зростання функції f t .
Зображенням функції-оригінала ( за Лапласом) називається функція
F p комплексного змінного p s i , яка визначається формулою
F p
f t e
0
pt
dt
(1.2)
при Re p s0 , де s0 - показник зростання f t . Умова (1.1) забезпечує
існування інтегралу (1.2).
Перетворення (1.2) називається перетворенням Лапласу. При
цьому пишуть: f t
F p .
5
Має місце теорема: якщо f t
F p , тоді в будь-якій точці
своєї неперервності функція f t визначається наступним чином:
1
f t
2i
a i
де
e pt F p dp
a i
a ib
Lim e
pt
a i
e
pt
F p dp ,
(1.3)
a i
F p dp .
b a ib
Властивості перетворення Лапласу
а) властивість лінійності: для будь-яких комплексних сталих і
f t g t F t G t
(1.4)
(тут і далі вважаємо f t
F p , g t
G p );
б) теорема подібності: для будь-якого сталого 0
p
F
в) диференціювання оригінала: якщо f t є оригіналом, то
f t
1
(1.5)
(1.6)
pF p f 0
Якщо f t n -разів неперервно-диференційована на 0, і
якщо f n t є оригінал, то
(1.7)
f n t p n F p p n 1 f 0 p n 2 f 0 f n 10
f t
г) диференціювання зображення рівносильне множенню оригінала
на “мінус аргумент”, тобто
(1.8)
F p tf t
n n
n
(1.9)
F p 1 t f t
д) інтегрування оригінала зводиться до ділення зображення на p :
t
f t dt
0
F p
p
(1.10)
6
е) інтегрування зображення рівносильне діленню на t оригінала:
f t
t
F p dp
p
(1.11)
є) теорема запізнювання: для будь-якого комплексного числа
f t
e p F p
(1.12)
ж) теорема зміщення: для будь-якого числа
Fp
et f t
(1.13)
з) теорема множення: добуток двох зображень F p і G p також є
зображенням, причому
F p G p
t
f g t d
(1.14)
0
и) теорема про раціональність зображення: для того, щоб
зображення F p було раціональною функцією, необхідно та
достатньо, щоб оригінал f t був лінійною комбінацією функцій
вигляду t met ( m - ціле невід’ємне число, - комплексне число);
і) обчислення оригінала дробово-раціонального зображення: нехай
правильна раціональна дріб, розклад якої на простіші є
F p
nk
M kr
p p
k
r 1
,
(1.15)
M kr t r 1 pk t
e
r 1!
(1.16)
r
k
де M kr і pk - деякі комплексні числа.
Тоді
f t
nk
k
r 1
7
буде оригіналом, який має зображення F p . Зокрема, якщо всі
полюси F p - прості, то
f t
M
(1.17)
A p
B p
дробово-раціональна,
k
де M k ResFp .
pk
Інакше,
pk t
,
ke
якщо
функція
F p
причому ступінь багаточлена A p менша ніж ступінь багаточлена
B p , то оригіналом для F p є функція
f t
k
1
d nk 1
n
lim
F p p p k k e pt , (1.18)
nk 1! p pk dp nk 1
де pk - полюси F p , nk - про їх кратність і сума береться по всім
полюсам.
Якщо всі полюси F p прості, то формула (1.18) спрощується та
приймає вигляд
A p k pk t
(1.19)
f t
e .
k B pk
1.3 Лінійні
коефіцієнтами
диференційні
рівняння
зі
сталими
Розглянемо диференційне рівняння зі сталими коефіцієнтами
та з початковими умовами
x t a 1 x t a 2 x t f t
(1.20)
x 0 x 0 , x 0 x 1 .
(1.21)
Будемо вважати, що функція f t і розв’язок xt разом з його
похідними другого порядку є оригіналами.
Нехай
8
xt
X p,
f t
F p .
Рівняння (1.20) з початковими умовами
застосування перетворення Лапласу буде мати вигляд:
p
2
(1.21)
після
a1 p a 2 X p F p x 0 p a1 x1 .
(1.22)
Розв’язуючи рівняння (1.22) відносно X p , знайдемо
X p
F p x 0 p a1 x1
p
2
a1 p a 2
.
(1.23)
Знайдемо оригінал для X p та отримаємо розв’язок рівняння
(1.20), яке задовольняє початковим умовам (1.21).
Аналогічно можна розв’язати будь-яке рівняння n -го порядку з
постійними коефіцієнтами.
1.4 Системи лінійних диференційних рівнянь
Нехай потрібно знайти розв’язок системи двох рівнянь з
постійними коефіцієнтами
dx
dt a1 x b1 y f 1 t
,
dy a x b y f t
2
2
2
dt
(1.24)
які задовольняють початковим умовам
x 0 x 0 , y 0 y 0 .
Нехай
(1.25)
xt X p , yt Y p ,
xt pX p x0 , yt pY p y0 ,
f1t F1 p , f2 t F2 p .
9
Застосуємо перетворення Лапласа до систем (1.24), (1.25),
отримуємо
pX p a1 X p b1Y p F1 p x 0
(1.26)
pY
p
a
X
p
b
Y
p
F
p
y
2
2
2
0
Ця системи є лінійною алгебраїчною системою двох рівнянь з
двома невідомими X p і Y p . Розв’язуючи її, знайдемо X p та
Y p , а потім переходячи до оригіналів, отримуємо розв’язок xt ,
yt системи (1.24), який задовольняє початковим умовам (1.25).
Аналогічно розв’язуються лінійні системи вигляду
dxk
dt
де k 1, 2, ... , n
n
a
l 1
kl
x l , a kl const ; x k 0 x k0 ,
10
1.5 Варіанти самостійних завдань
Задача 1.5.1 Знайти розв’язок диференційного рівняння при
нульових початкових умовах.
1.5.1
y 3 y 2 y 1 x 2
1.5.2
y y 6 x 2 3x
1.5.3
y y x 2 x
1.5.5
y y 5 x 2 1
7 y y 12 x
1.5.6
y 3 y 2 y 3x 2 2 x
1.5.7
y y 3x 2 2 x 1
1.5.8
y y 4 x 2 3 x 2
1.5.9
y 4 y 32 384 x 2
1.5.10
y y 49 24 x 2
1.5.4
1.5.13
y 2 y 3 x 2 x 4
y 13 y 12 y x 1
y y 6 x 5
1.5.14
y 3 y 2 y x 2 2 x 3
1.5.11
1.5.12
1.5.16
y 5 y 6 y x 12
y 13 y 12 y 18 x 39 2
1.5.17
y 5 y 6 y 6 x 2 2 x 5
1.5.18
y 3 y 2 y 1 x 2
1.5.19
y y 6 x 2 3x
1.5.20
y y x 2 x
1.5.15
11
Задача 1.5.2 Знайти розв’язок диференційного рівняння при
нульових початкових умовах.
1.5.1
y 4 y 5 y 2 y 16 12 x e x
1.5.2
y 4 y 5 y 2 y 16 12 x e x
1.5.3
y y y y 3x 7 e 2 x
1.5.4
y 2 y y 2 x 5e 2 x
1.5.5
y 3 y 4 y 18 x 21e x
1.5.6
y 5 y 8 y 4 y 2 x 5e x
1.5.7
y 4 y 4 y x 1e x
1.5.8
y 2 y y 18 x 21e 2 x
1.5.9
y y y y 8 x 4e x
1.5.10
y 3 y 2 y 4 xe x
1.5.11
y 3 y 2 y 4 x 9e 2 x
1.5.12
y 4 y 5 y 2 y 12 x 16 e x
1.5.13
y y 2 y 6 x 11e x
1.5.14
y y 2 y 6 x 5e x
1.5.15
y 4 y 4 y 9 x 15e x
1.5.16
y 3 y y 3 y 4 8 x e x
1.5.17
y y 4 y 4 y 7 6 x e x
1.5.18
y 3 y 2 y 1 2 x e x
1.5.19
y 5 y 7 y 3 y 20 16 x e x
1.5.20
y 4 y 3 y 4 xe x
12
Задача 1.5.3 Знайти розв’язок диференціального рівняння при
нульових початкових умовах
1.5.1
y 2 y 4e x sin x cos x
1.5.2
y 2 y 2e x sin x cos x
1.5.3
1.5.4
1.5.5
y 4 y 4 y e 2 x sin 6 x
y y 2 cos 7 x 3 sin 7 x
y 2 y 5 y sin 2 x
1.5.7
y 4 y 8 y e x 5 sin x 3 cos x
y y 2 cos 5 x 3 sin 5 x
1.5.8
y 4 y 4 y e 2 x sin 3x
1.5.6
1.5.11
y 6 y 13 y e 3 x cos 4 x
y y 2 cos 3x 3 sin 3x
y 2 y 5 y 2 sin x
1.5.12
y 4 y 8 y e x 3 sin x 4 cos x
1.5.13
y 2 y 10e x sin x cos x
1.5.9
1.5.10
1.5.16
y 4 y 4 y e 2 x sin 5 x
y y 2 cos 5 x 3 sin 5 x
y 2 y 5 y 17 sin 2 x
1.5.17
y 6 y 13 y e 3 x cos x
1.5.18
y 4 y 8 y e x 3 sin x 5 cos x
1.5.19
y 2 y 6e x sin x cos x
1.5.20
y 4 y 4 y e 2 x sin 4 x
1.5.14
1.5.15
13
Задача 1.5.4 Знайти розв’язок системи диференціальних рівнянь
при нульових початкових умовах.
1.5.1
1.5.3
1.5.5
1.5.7
1.5.9
1.5.11
1.5.13
1.5.15
1.5.17
1.5.19
x x 4 y
y 2 x 3 y
x 3x 2 y
y 2 x y
x 3x y
y x 3 y
x x 3 y
y 3x y
x 5 x y
y 3x 9 y
x 5 x 4 y
y 2 x 3 y
x 2 x 3 y
y x 4 y
x x 5 y
y 7 x 3 y
x 5 x 8 y
y 3x 3 y
x 3x y
y x y
1.5.2
1.5.4
1.5.6
1.5.8
1.5.10
1.5.12
1.5.14
1.5.16
1.5.18
1.5.20
x 5 x 4 y
y 2 x 11 y
x x 4 y
y x y
x 3x y
y 4 x y
x x 2 y
y 3x 6 y
x x 6 y
y 2 x 9 y
x 2 x 8 y
y x 4 y
x 3x y
y 8 x y
x 4 x 6 y
y 4 x 2 y
x 4 x y
y 8 x y
x 5 x 4 y
y 2 x y
14
Задача 1.5.5 Розв’язати задачу Коші
1.5.1
1.5.2
1.5.3
1.5.4
1.5.5
1.5.6
1.5.7
1.5.8
1.5.9
1.5.10
1.5.11
x 3 y x
, x0 0 , . y 0 1 .
y
5
y
x
x 7 x y
, x0 1, . y 0 1 .
y
2
x
5
y
x y x
, x0 2 , y 0 1 .
y x 2 y
x y x
, x0 1 , y 0 1 .
y
2
x
y
x 2 x y
, x0 1, y 0 1 .
y
y
x
x y
, x0 1, y 0 1 .
y x
x 3 y x
, x0 1, y 0 1 .
y y x
x y
, x0 1, y 0 1 .
y
2
x
2
y
x 3x 4 y
, x0 1, y 0 1 .
y 4 x 3 y
x 2 y
, x0 2 , y 0 2 .
y 2 x
x 3 y x
, x0 1, y 0 1 .
y
y
x
15
1.5.12
1.5.13
1.5.14
1.5.15
1.5.16
1.5.17
1.5.18
1.5.19
1.5.20
x 2 x 2 y
, x0 1, y 0 1 .
y 2 x y
x y
, x0 1 , y 0 2 .
y
x
2
y
x 2 y 3x
, x0 1, y 0 2 .
y
y
x 2 x y
, x0 2 , y 0 1 .
y 3x 4 y
x 3x y
, x0 1, y 0 1 .
y
x
y
x 4 x 4 y
, x0 3 , y 0 15 .
y
2
x
6
y
x x 2 y
, x0 0 , y 0 1 .
y 2 x 5 y
x x y
, x0 1 , y 0 3 .
y 2 x 3 y
x 2 x y
, x0 3 , y 0 2 .
y
4
x
6
y
1.6 Приклади розв’язання задач
Приклад 1.6.1 Знайти розв’язок задачі Коші
(1.20)
x 5x 4x 4 , x0 0 , x0 2
Розв’язок: застосуємо перетворення Лапласу до обох частин
рівняння (1.20). Отримаємо
16
p
2
5 p 4 X p
4
2.
p
(1.21)
Звідси знаходимо
X p
2p 4
.
p p 5p 4
2
(1.22)
Розкладемо праву частину на елементарні дроби:
X p
1
2
1
.
p p1 p4
Переходячи до оригіналів, отримаємо шуканий розв’язок
xt 1 2e t e 4t .
Приклад 1.6.2 Знайти розв’язок задачі Коші
x 7 x y 5
,
y 2 x 5 y 37t
x 0 0 , y 0 0 .
(1.23)
Розв’язок: застосуємо перетворення Лапласу до системи (1.23).
Отримаємо систему алгебраїчних рівнянь
5
pX p 7 X p Y p p
.
pY p 2 X p 5Y p 37
p2
Розв’язуючи її, одержимо
X p
5 p 2 24 p 37
47 p 259
, Y p 2 2
.
2
2
p p 12 p 37
p p 12 p 37
Розкладемо дроби на елементарні
1
1
p6
,
X p 2 2
p p
p 12 p 37
17
Y p
1
7
p6
2 2
p p
p 12 p 37
X p
1
1
p6
,
p p 2 p 6 2 1
або
Y p
p6
1
7
1
.
2
2
p p
p 6 1 p 6 2 1
Переходячи до оригіналів, отримаємо шуканий розв’язок
6 t
xt 1 t e cos t ,
6t
6t
yt 1 7t e cos t e sin t .
18
2 ЛАБОРАТОРНА РОБОТА № 2
Опис об’єктів у просторі станів. Передавальні функції.
Структурні схеми представлення систем керування
2.1 Загальні відомості
Розглянемо лінійну керовану систему
x t At x t Bt ut ,
y t C t x t .
де
(2.1)
(2.2)
x t , ut , y t − вектори розмірів n, m , p відповідно;
ut − вхід системи, керування;
yt − вихід системи, вихідна величина;
xt − стан системи, вектор фазових координат, траєкторія руху.
Елементи матриць Ax, Bx, Cx − неперервні функції часу.
Рівняння (2.1) називається рівнянням стану, (2.2) – рівнянням
спостереження або рівнянням виходу.
Множина значень вектора xt називається простором станів і
позначається X . Для системи (2.1), (2.2) X співпадає з n − мірним
простором R n .
Якщо в системі (2.1), (2.2) матриці Ax, Bx, Cx не залежать
від часу, то система називається стаціонарною.
Розглянемо стаціонарну систему
x t Ax t Bu t ,
y t Cx t .
Застосуємо до неї перетворення
початковими умовами. Одержимо
Лапласу
pX p AX p BU p ,
Y p CX p ,
(2.3)
(2.4)
з
нульовими
(2.5)
(2.6)
19
де X p , U p , Y p − зображення функцій xt , ut , yt відповідно.
З рівнянь (2.5), (2.6) виразимо Y p через U p
Y p C pE A1 BU p .
(2.7)
Передавальною функцією називається відношення зображення
за Лапласом вихідної величини до зображення вхідної величини при
нульових початкових умовах
W p
Y p
.
U p
(2.8)
Передавальною функцією лінійної стаціонарної системи (2.3),
(2.4) є функція
W p C pE A1 B .
(2.9)
Ланкою в теорії керування називають математичну модель
елемента.
Структурною схемою називають графічне зображення
математичної моделі системи керування у вигляді з’єднання ланок.
Ланку в структурній схемі позначають у вигляді прямокутника з
позначенням вхідної та вихідної величин та передавальною функцією
всередині
u
W(p)
W(p)
y
(2.10)
Ланки з’єднуються між собою за допомогою зрівняльних ланок
(суматорів) вігляду.
y1
y
y2
y
y y1 y2
y1
y
y2
y
y y1 y2
(2.11)
20
Розгалуження в системі керування здійснюється за допомогою
вузлів
(2.12)
Правила перетворення структурних схем:
а) послідовне з’єднання ланок
y0
u
W1 p
y1
W2 p
y2
...
yn1
Wn p
yn
u
Ланцюг з послідовно з’єднаних ланок можна замінити однією
ланкою з передавальною функцією
n
W p Wi p
i 1
б) паралельне з’єднання ланок
W1 p
y0
u
W2 p
Wn p
y1
y2
yn
u
y
(2.13)
21
Ланцюг з паралельно з’єднаних ланок можна замінити однією
ланкою з передавальною функцією
n
W p Wi p
(2.14)
i 1
в) ланка, охоплена зворотнім зв’язком.
Кажуть, що ланка охоплена зворотнім зв’язком, якщо його
вихідний сигнал через будь-яку іншу ланку передається на вхід. При
цьому, якщо y 1 віднімається з вхідного сигналу y 0 , то зворотній
зв’язок називається від’ємним, в протилежному випадку додатнім.
y0
e1
u
y
WП p
y1
WОС p
Передавальною функцією ланки, яка охоплена зворотнім
зв’язком є
W p
WП
1 WПWОС
(2.15)
г) перенесення суматора:
1) перенесення за ходом сигналу
y0
u
y1
W1 p
f
e1
y2
W2 p
f
W2 p
y0
u
W1 p
y1
W2 p
y2
22
2) перенесення проти ходу сигналу
y0
W1 p
u
f
y1
e1
W2 p
y2
f
W11 p
y0
u
e1
W1 p
W2 p
y2
Рисками позначені нееквівалентні ділянки.
д) перенесення вузла:
1) перенесення за ходом сигналу
y0
u
y0
u
W1 p
W2 p
W1 p
W2 p
y2
y2
W21 p
2) перенесення проти ходу сигналу
y0
u
y0
W1 p
u
W1 p
u
y1
W2 p
y2
y1
23
е) переставлення вузлів і суматорів:
1) переставлення вузлів
2
2
1
1
2) перенесення суматорів
y1
y1
f1
y2
f2
y1
f2
f1
y
y
3) перенесення вузла через суматор
f1
-1
f1
y1
y
y1
y
y
y1
f1
f1
y
y
y
24
2.2 Варіанти самостійних завдань
Знайти передавальну функцію W p лінійної системи
x Ax Bu
y Cx
двома способами:
а) за допомогою формули W p C pE A1 B ;
б) перетворенням структурної схеми.
2.2.1
4 0 1
A 0 1 0 ,
3
0 1
1
B 1 ,
1
C 1 1 0 .
2.2.2
0 0 1
A 0 3 0 ,
1 0 0
1
B 1 ,
0
C 0 1 2 .
2.2.3
0 1 0
A 0 2 1 ,
1 3 2
1
B 2 ,
3
C 1 0 1 .
2.2.4
1 0 1
A 4 1 1 ,
2 0 1
0
B 1 ,
1
C 0 1 1 .
2.2.5
1 2 3
A 4 5 6 ,
3 2 1
1
B 0 ,
2
C 1 3 0 .
25
2.2.6
1 2 1
A 1 0 3 ,
2 0 1
2
B 0 ,
2
C 1 1 0 .
2.2.7
1 2 0
A 3 0 4 ,
2 1 1
2
B 1 ,
1
C 3 0 0 .
2.2.8
1 1 2
A 2 3 0 ,
2 0 1
0
B 1 ,
2
C 2 0 1 .
2.2.9
4 4 1
A 3 2 3 ,
4 0 3
4
B 4 ,
2
C 3 4 1.
2
B 5 ,
2
C 4 4 0 .
0
2 2
2.2.10 A 0 5 1 ,
1 4 2
4 2 1
2
2.2.11 A 5 3 2 , B 1 ,
2 1 2
3
C 4 3 4 .
2
5 2 4
2.2.12 A 2 0
2 , B 1 ,
4
1 0 4
C 1 5 4.
26
3
5 3
2.2.13 A 3 4 3 ,
4 2 0
2
B 3 ,
1
C 4 3 2 .
5 1 4
2.2.14 A 3 4 3 ,
4 3
0
4
B 3 ,
5
C 3 3 3 .
2
0 0
2.2.15 A 2 1 1 ,
0 2 2
0
B 3 ,
2
C 0 1 2 .
1 1 1
2.2.16 A 1
0 2 ,
0 2 1
1
B 1 ,
2
C 1 0 0 .
0 1 0
2.2.17 A 3 2 2 ,
1 3 1
3
B 2 ,
3
C 3 3 2.
1 2 0
0 ,
2.2.18 A 3 2
2 1 1
1
B 2 ,
1
C 1 0 3 .
2 2 0
2.2.19 A 2 0 1 ,
3 2 0
0
B 2 ,
2
C 3 0 2 .
27
2 2 0
2.2.20 A 1
0 3 ,
2 2 1
3
B 1 ,
2
C 1 2 2 .
2.3 Приклад розв’язання задачі
Знайти передавальну функцію W p лінійної системи
x Ax Bu
y Cx
двома способами:
а) за допомогою формули W p C pE A1 B ;
б) перетворенням структурної схеми.
0 1 0
A 0 1 1 ,
1 0 1
1
B 0 ,
0
C 1 0 0 .
Розв’язок:
а)
p
pE A 0
1
1
0
p 1 1 ,
0
p 1
pE A p3 2 p2 p 1 ,
p 12
p 1
1
1
pE A1 3 12
p p 1
p
p 2 p p 1
p 1
1
p p 1
28
W p C pE A1 B
p 12
p 1
1 1
1
1 0 0
1
p p 1
p 0
p3 2 p 2 p 1
p 1
1
p p 1 0
1
1
p 12
p 1 1 0
3
2
0 p 2 p p 1
p 1
2
p3 2 p 2 p 1
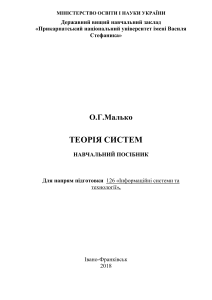
б) запишемо рівняння системи
x 1 x 2 u
x 2 x 2 x 3
x 3 x 1 x 3
y x1
Побудуємо структурну схему:
u
x1 1
p
x1
-1
x3
1
x3
p
x3
-1
y2 x2 1
p
x2
y
Обчислимо передавальні функції ланок охоплених зворотнім
зв’язком:
29
W1 W2
u
1
p
1
p
1
p 1
-1
-1
1
p 1
y
Замінимо ланцюг з послідовно з’єднаних ланок однією ланкою з
передавальною функцією
W3 1
u
1
1 1 1 2
p 1
p 1 p 1
1
p
1
p 12
y
30
Передавальна функція системи дорівнює
1
p
W
1
1
p p 12
p 12
p3 2 p 2 p 1
31
3 ЛАБОРАТОРНА РОБОТА № 3
Керованість. Побудова ідентифікаторів
3.1 Загальні відомості
Поняття керованності пов’язано з переходом системи за
допомогою керування з одного стану в інший.
Для лінійної стаціонарної системи
x Ax Bu ,
(3.1)
де матриці A(n n) i B( n m ) постійні, при відсутності обмежень в
просторі станів і просторі керувань керованість залежить лише від
матриць А і В . Тому замість керованості системи говорять про
керованість пари (А,В) .
Означення 3.1 Якщо для довільних заданих
x 0 , x 1 існує
керування u(t) , яке переводить систему (3.1) за скінчений час t1 – t0
зі стану x(t0) = x0 в стан x(t1) = x1 , то система (3.1) або пара (А,В)
називається повністю керованою.
Складемо матрицю V виміру n m і вигляду
V ( B, AB, A 2 B,..., A n1 B)
(3.2)
Теорема 3.1 (критерій керованості стаціонарної системи)
Лінійна стаціонарна n-вимірна система (3.1) керована тоді і
тільки тоді, коли ранг
V=n
(3.3)
Матриця V називається матрицею керованості.
Означення 3.2
Законом керування будемо називати
відображення k : T×X → V , яке ставить у відповідність кожному
моменту часу t і стану системи в цей момент часу x(t) значення
керуючого впливу u(t) .
Розглянемо лінійний закон керування
(3.4)
u( t ) k ( t ) x( t ) ,
де k(t) - m×n – матриця, яка складається з неперервних функцій.
32
Після підстановки (3.4) в рівняння (3.1) одержимо рівняння
замкненої системи
x ( t ) A Bk ( t )x( t )
(3.5)
У подальшому зручно буде обирати певний базіс у просторі X з
тим, щоб матриці системи мали канонічну форму.
Для системи
(3.6)
x (t ) =Ax(t) + Bu(t) ,
y(t)=Cx(t)
(3.7)
розглянемо невироджене перетворення змінних xˆ Px , де P –
невироджена матриця розміру n×m . У нових змінних система
буде мати вигляд
1
xˆ PAP xˆ PBu
.
1
y CP xˆ
.
Теорема 3.2 Нехай матриці керованої системи предсавлені в
двох різних базисах простору Х : {A, B} i { Aˆ , Bˆ } . Тоді матриця P
переходу від представлення {A, B} до представлення { Aˆ , Bˆ }
єдина і обчислюється за формулою:
ˆ Bˆ , ..., A
ˆ n1 Bˆ ][ B , AB , ..., A n1 B ]1 .
P [ Bˆ , A
Розглянемо лінійну керовану систему з одним входом
x (t ) =Ax(t) + Bu(t) ,
(3.8)
де b – вектор розміру n×1 .
Нехай
A ( ) n 1 n1 ... n –
характеристичний багаточлен матриці А .
Означення 3.3 Пара матриць
(3.9)
33
1
... 0
0
0
0
... 0
0
0
A* 0
0
... 1 , b * 0 (3.10)
. . ........................
...
1
n n1 ... 1
називається керованим канонічним представленням
одним входом.
системи з
Теорема 3.3 В просторі Х тоді і тільки тоді існує базіс, в якому
пара {A, B} має канонічне представлення, коли ця пара повністю
керована.
Теорема 3.4 Нехай лінійна стаціонарна система з одним входом
(3.8) повністю керована і нехай
y ( ) n 1 n1 ... n – (3.11)
довільний нормований багаточлен
n-го порядку з дійсними
коефіцієнтами. Тоді існує вектор зворотнього зв’язку k такий, що
x ( t ) A Bk x ( t )
y ( )
замкнена система
має
своїм
характеристичним багаточленом.
Ця теорема дає можливість синтезувати систему з заданими
властивостями.
Процедура синтезу:
а) обчислюється матриця керованості V і перевіряється, чи
співпадає ранг цієї матриці з розмірністю системи;
б) перетворюються матриці системи до канонічного вигляду та
обчислюється A ( ) ;
в) обчислюються компоненти вектора зворотнього зв’язку за
формулами
(3.12)
k n i 1 i i , i 1, n .
34
3.2 Варіанти самостійних завдань
x (t ) =Ax(t) + bu(t) підібрати компоненти
вектора зворотнього зв’язку k таким чином, щоб характеристичний
багаточлен замкненої системи x ( t ) A bk x( t ) мав би корені
1 , 2 , 3 , 4 .
Для системи
3.2.1
3.2.2
0 2 2 2
4 5
4 4
A
,
2 1 3 1
2
3
0
3
1 2 1 , 3 4 i .
1
4
B
1
3
,
2 2
1 3
3 4 2
0
A
,
1 4
3
0
0
2 1
1
2
3
B
3
1
,
3
0
B
1
4
,
1 2 3 1 , 4 2 .
3.2.3
5
3 2
3
1
2 5 2
A
5 5
0
4
3 4
0 3
,
1 2 1 , 3 4 3 i .
3.2.4
3 3 3
2
2 4 2
5
A
,
3 2
3
1
0 3 2
5
B
0
3
,
1
2
35
1 1 , 2 3 4 2 .
3.2.5
3
5
3 3
5 2 2 5
A
,
5
2 1
1
2 2
3
5
1 1 , 2 3 2 i ,
3.2.6
2
4
A
0
2
0
2
0
1
0
4 2
,
1
0
0
4
4
1 2 , 2 3 ,
3.2.7
5
5
B
,
3
3
4 0 .
5
1
B
,
4
3
3 4 0 .
3
0 1 1
3 1
2
5
A
3 2
3 2
1
1
0 1
,
2
2
B
1
2
,
5
2
B
0
3
,
1 2 , 2 3 4 0 .
3.2.8
2 2 1
0
2 3
2 1
A
,
3
0 4
3
0 3
1
0
1 2 1 , 3 4 0 .
36
3.2.9
2
2
1
2
1 2
2
3
A
,
3 1
1 1
4
1
2
0
1 2 , 2 1 ,
3.2.10
3.2.11
4
2
A
3
2
,
,
4
5
B
,
1
2
3 4 1 2 i .
1
3
0 3
,
0 2 4
2 1 2
3
3
4
B
,
5
2
3 4 1 .
2
4
4 4
4
3 4 3
A
4
5
4 3
1
3
0 5
1 2 1 ,
3.2.12
3 4 i .
4
4
0
1
3
0
2
1
A
3 2 2 1
2 4
1 3
1 2 2 ,
0
1
B
,
1
1
5
1 2 3 1 ,
4 2 .
3
1
B
,
1
2
37
3.2.13
3.2.14
0
1
1
0
A
2 2
3 1
1 1
3 2
,
1
4
2
0
1 2 1 ,
3 4 3 i .
4
1
A
2
3
1 1 ,
3.2.15
1
1 2
1 2
5
4
3
1
,
3
0
2 3 2 ,
2 3 2 ,
2 3 ,
2
1
,
0
1
3
1
B
,
2
0
4 0 .
0
2 4
2
2 4 3 3
A
,
0
0
2 2
1
4
1
4
1 2 ,
B
4 0 .
4
4
2 3
5 3
2
5
A
,
4
4 4
0
1
1 1 2
1 1 ,
3.2.16
3
0
5
B
,
2
2
1
0
B
,
0
0
3 4 0 .
38
3.2.17
3 3
0
5
1 4
4 2
A
,
2 1 1 2
2
4 4
5
1 2 ,
3.2.18
2 0 ,
0 4
0
3 1
3
A
1 1
0
4 3 2
1 2 1 ,
3.2.19
5
3
A
4
1
1 2 ,
3.2.20
3
1
B
,
4
2
3 4 2 i .
2
0
,
2
5
B
3 4 0 .
2 1
4
3
4
5
0
2
2 1 ,
2
5
,
2
1
1
0
B
2
2
,
3 4 2 i .
1 3 1
1
0
5 1
5
A
,
4
2 3
2
2 1
2
1
1 2 1 ,
5
5
,
1
0
3
1
B
2
5
,
3 2 , 4 0 .
3.3 Приклад розв’язання задачі
Для системи
x =Ax + bu підібрати компоненти вектора
k
таким чином, щоб характеристичний
зворотнього зв’язку
39
багаточлен замкненої системи
1 1, 2 2, 3 4 0 .
x ( t ) A bk x( t )
1 2 1 2
1 3 3 4
A
,
1 4 1 2
0 4 2 5
мав корені
1
0
b .
0
0
Розв’язок:
а) обчислимо матрицю керованості V = [b, Ab, A2b, A3b ] .
Для цього спочатку знайдемо вектори Ab, A2b, A3b :
1 2 1 2 1 1
1 3 3 4 0 1
Ab
;
1 4 1 2 0 1
0 4 2 5 0 0
1 2 1 2 1 2
1 3 3 4 1 1
2
A b A Ab
;
1 4 1 2 1 6
0 4 2 5 0 2
1 2 1 2 2 6
1 3 3 4 1 21
3
2
A b A A b
1 4 1 2 6 12
0 4 2 5 2 18
Отже, матриця керованості має вигляд:
.
40
V
1 2 6
0 1 1 21
.
0 1 6
12
0 0 2 18
1
Знайдемо ранг цієї матриці:
~
~
1 2 6
1
0 1 1 21
0
~
0 1 6 12
0
0 0 2 18
0
1
1
1 2 6
0
1 1 21
~
0
0 5 9
0 1 6
0
1
1 2
1 2
0
1
1
1
0
0
0
1
0
0
6
1
1 21
0
~
1 6
0
0 1
0
0
0
1
0
0
0
1
0
0
0
1
0
0
0
0
1
0
0
~
0
0
1
0
1 2
1
0
0
1
1
0
0
6
1 21
~
1 6
0 21
0
0 0
~
1 0
0 1
0
0
0
.
0
1
Отже, ранг V = 4 .
б) перетворимо матриці системи до канонічного вигляду. Для
цього знайдемо характеристичний багаточлен матриці А :
A ( ) E A
1 2
1
3
1
4
0
4
1
2
3
4
1 2
2
5
41
3
( 1)
4
4
3
2
4
1
2
2
1
2
1 2 4 1 2 3 3 4
2 5
4
2 5
4
2 5
= ( λ − 1)∙[( λ + 3)∙( λ − 1)∙( λ − 5) + 32 + 24 + 16∙( λ − 1) − 12∙( λ − 5) +
+ 4∙( λ + 3)] − (−2∙( λ − 1)∙( λ − 5) + 16 + 8 + 8∙( λ − 1) − 4∙( λ − 5) – 8) −
− (−6∙( λ − 5) + 4∙( λ + 3) − 16 + 24 − ( λ + 3)∙( λ − 5) + 16) =
= λ4 − 4∙λ3 + λ2 + 126∙λ − 236 .
1 4, 2 1, 3 126 , 4 236 .
Канонічна форма матриць має вигляд:
1
0
0
0
1
0
A*
0
0
1
236 126 1
0
0
0
0
*
, b .
0
0
4
1
в) запишемо характеристичний багаточлен замкненої системи:
y ( ) ( 1 ) ( 2 ) ( 3 ) ( 4 ) ( 1) ( 2) 2
= 4 3 3 2 2 ;
1 3, 2 2, 3 0, 4 0 .
Обчислимо компоненти вектора зворотнього зв’язку
формулами (3.12) :
k 1 4 4 0 236 236 ,
k
за
42
k 2 3 3 0 126 126 ,
k3 2 2 2 1 1,
k4 1 1 3 4 7 .
Отже, k = ( 236 , −126 , 1 , 7 ) .
43
4 ЛАБОРАТОРНА РОБОТА № 4
Спостережуваність. Побудова ідентифікаторів
4.1 Загальні відомості
Під спостережуваністю в теорії керування розуміють
можливість визначення величин на основі виміру інших величин.
Задача спостереження полягає у наступному: отримана (через
спостереження) множина Z , яка пов’язана відомим оперетором з
множиною X простору станів системи із заданою математичною
моделлю. Потрібно визначити X або деяку його підмножину
Xn X .
Розглянемо лінійну стаціонарну систему з одним входом
x (t ) =Ax(t) + bu(t) ,
y(t)=Cx(t) ,
(4.1)
(4.2)
де А – матриця розміру n×m ,
b – вектор розміру 1×n ,
C – вектор розміру n×1 .
Повна спостережуваність системи
(4.1) , (4.2)
означає
можливість визначення початкового стану x0 цієї системи по
вихідному сигналу y(t) , відомому на деякому скінченому інтервалі t
(початку інтервалу відповідає x0 ).
Якщо для системи (4.1) , (4.2) ранг матриці спостережуваності
Q [C T , AT C T , ( AT ) 2 C T , ..., ( AT ) n1 C T ]
(4.3)
дорівнює порядку системи n , то система повністю спостережувана.
Якщо ранг Q < n , то за вихідним сигналом y(t) можна оцінити
не всі, а лише деяку частину змінних стану об’єкту.
Побудуємо таку оцінку вектора стану системи (4.1) , (4.2) x̂ ,
щоб xˆ ( t ) x( t ) 0 при t → ∞ .
44
Означення 4.1 Динамічну систему, яка формує на вході вектор
xˆ (t ) за даними о входах та виходах системи будемо називати
ідентифікатором стану .
Знаючи A , B , u(t) та початкове значення x(t0) можна оцінити
x(t) , якщо підвести сигнал u(t) до електронної моделі системи
об’єкта
(4.4)
x̂ = A x̂ + Bu ,
де x(t0) задано.
Недоліком оцінюючого пристрою (4.4) є те, що він діє по
разомкненому циклу і після деякого часу роботи буде давати досить
неточну оцінку вектора х . Використання виходу y(t) дозволить
поліпшити оцінку стану xˆ ( t ) .
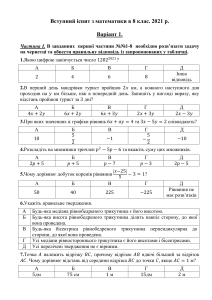
Розглянемо ідентифікатор:
На вхід цього ідентифікатора потрапляє як вхід, так і вихід
системи (4.1) , (4.2) . Вихід y(t)=Cx(t) порівнюється з виходом
yˆ ( t ) Cxˆ ( t ) , та їх різниця є сигналом похібки і подається на вхід
системи у якості корегуючого впливу. Саме різниця y yˆ y Cx
помножується на вектор С і подається на вхід ідентифікатора.
45
Динамічні властивості такого ідентифікатора істотньо залежать від
вибору вектора С . За рахунок вибору цього вектора необхідно
забезпечити бажаний характер прямування різниці x( t ) xˆ ( t ) 0
при t → ∞ .
Означення 4.2 Лінійна динамічна система, виходом якої є
вектор xˆ ( t ) називається асимптотичним ідентифікатором стану
лінійної системи (4.1) , (4.2) , якщо x( t ) xˆ ( t ) 0 при t → ∞ .
Розмірність наведеного ідентифікатора дорівнює розмірності
системи п . Динамічні рівняння цього п-вимірного ідентифікатора
мають вигляд:
xˆ ( t ) Axˆ ( t ) l[ y( t ) Cxˆ ( t )] bu( t ) (4.5)
або
xˆ ( t ) [ A lC ] xˆ ( t ) ly( t ) bu( t )
(4.6)
Якщо ввести нові змінні за формулою
~ ( t ) x( t ) xˆ ( t ) ,
x
(4.7)
то рівняння ідентифікатора набудуть вигляду:
~ ( t ) [ A lC ] x
~(t ) ,
x
(4.8)
де x~ ( t ) є вектором похибки оцінки стану.
Теорема 4.1 Якщо лінійна стаціонарна система з одним
виходом
повністю
спостережена,
то
можна
побудувати
асимптотичний ідентифікатор з довільним бажаним набором власних
чисел матриці [ A lC ] { 1 , 2 , ..., n } , причому Re( i ) 0 .
Оберемо базіс у просторі станів таким чином, щоб пара
матриць (А, С) набула вигляду
0 0 ... 0 n
1 0 ... 0 n 1
A
.............................
0 0 ... 1
1
,
(4.9)
46
(4.10)
C (0, 0, ...,1) ,
де i − коефіцієнти характеристичного багаточлена матриці А .
Це представлення матриць
(А, С)
називається
ідентифікаційним канонічним представленням .
Нехай задан довільний нормований багаточлен п-го порядку
(4.11)
n ( ) n 1 n1 ... n
з дійсними коефіцієнтами. Оберемо у якості компонент вектору l
числа
l n i 1 i i
( i 1, 2, ..., n)
(4.12)
Безпосередня перевірка показує, що характеристичний
багаточлен матриці [ A lC ] співпадає із заданим багаточленом
матриці n ( ) .
4.2 Варіанти самостійних завдань
Дана лінійна стаціонарна система
x (t ) =Ax(t) + bu(t) ,
y(t)=Cx(t) ,
(4.1)
(4.2)
Побудувати асимптотичний ідентифікатор, характеристичними
числами якого є 1 , 2 , 3 , 4 .
4.2.1
2 1 2
1
1 3 3 4
A
,
1 4
1
2
0
4
2
5
1 2 1 , 3 4 0 .
C 1 , 0 , 1 , 0 ,
47
4.2.2
2
2 1 1
2 1
2 3
A
,
4
1
5 4
4 3
2
2
C 1 , 1 , 2 , 0 ,
1 2 0 , 3 4 1 i .
4.2.3
1 2 2 3
2
0
3
2
A
,
3
1
2
0
0 2 1 3
1 1 ,
4.2.4
C 0 , 2 , 2 , 0 ,
2 2 , 3 4 2 .
1
0
1 3
4 2 1 5
A
,
3
0
0
4
0
0 2 2
C 1 , 1 , 0 , 1 ,
1 2 1 2 i , 3 4 0 .
4.2.5
A
0
3
2
2 4
,
4 2 5 2
3
3
1 2
1
2
1
1 2 0 , 3 4 1 i .
C 5 , 2 , 3 , 4 ,
48
4.2.6
A
0 1
0 5
0 3
0 3
4 3
3 2
,
1 3
1 3
C 1 , 4 , 1 , 3 ,
1 2 2 , 3 4 i .
4.2.7
1 1 2 1
2 1 5
5
A
,
1 4 5 4
1
3
4
1
1 1 ,
4.2.8
C 2 , 3 , 3 , 1 ,
2 3 , 3 4 0 .
2 2 1
4
2 1 5
5
A
1 4 5 4
1
3
4
1
,
C 3 , 0 , 1 , 4 ,
1 2 1 , 3 4 1 i .
4.2.9
1 3 1
1
0
5 1
5
A
,
4
2 3
2
2 1
2
1
C 0 , 3 , 1 , 2 ,
1 2 0 , 3 4 i .
4.2.10
5
3
A
4
1
2 1
4
3
4
5
0
2
2
5
,
2
1
C 5 , 5 , 3 , 3 ,
49
1 2 2 , 3 4 0 .
4.2.11
0 4
0
3 1
3
A
1 1
0
4 3 2
1 1 ,
4.2.12
2
0
,
2
5
C 5 , 1 , 4 , 3 ,
2 3 , 3 4 1 i
3 3
0
5
1 4
4 2
A
2 1 1 2
2
4 4
5
,
C 2 , 2 , 1 , 2 ,
1 2 1 , 3 4 i
4.2.13
0
2 4
2
2 4 3 3
A
,
0
0
2 2
1
4
1
4
C 5 , 2 , 0 , 3 ,
1 2 2 , 3 4 0
4.2.14
4
4
2 3
5 3
2
5
A
,
4
4 4
0
1
1 1 2
1 2 2 , 3 4 1 i
C 0 , 1 , 1 , 1 ,
50
4.2.15
4
1
A
2
3
1 1 ,
4.2.16
3
1
1 2
1 2
5
4
3
1
,
3
0
C 3 , 4 , 5 , 2 ,
2 3 , 3 4 i
0
1
1
0
A
2 2
3 1
1 1
3 2
,
1
4
2
0
C 4 , 5 , 1 , 2 ,
1 2 1 , 3 4 2 i
4.2.17
4.2.18
4
2
A
3
2
1
3
0 3
,
0 2 4
2 1 2
1 1 ,
2 2 , 3 4 0
3
5
2
4
4 4
4
3 4 3
A
4
5
4 3
1
3
0 5
,
1 2 2 , 3 4 i
C 3 , 1 , 1 , 2 ,
C 0 , 5 , 2 , 2 ,
51
4.2.19
4
4
0
1
3
0
2
1
A
,
3 2 2 1
2 4
1 3
1 1 ,
4.2.20
C 2 , 1 , 0 , 1 ,
2 3 , 3 4 1 i
2
2
1
2
1 2
2
3
A
3 1
1 1
4
1
2
0
,
C 3 , 1 , 2 , 0 ,
1 2 1 , 3 4 0
4.3 Приклад розв’язання задачі
Задача Для системи
x (t ) =Ax(t) + bu(t) ,
y(t)=Cx(t) ,
побудувати асимптотичний ідентифікатор,
числами якого є 1 2 1, 3 4 2 .
1 2
4 4
A
2
0
0
3
2
4
0
,
3 1
0
3
(4.1)
(4.2)
характеристичними
0
C ( 1, 1, 2, 1) .
Розв’язок:
а) перевіремо, чи є пара (А, С) повністю спостережуваною. Для
цього побудуємо матрицю
52
1 1 9 17
1 7 29
1
T
T T
T 2 T
T 3 T
.
Q (C , A C , ( A ) C , ( A ) C )
2 2 10 2
1
3 13 47
Знайдемо ранг матриці Q :
29
0 0 2 12
~
0 4 4 60
0 2 6 18
1
1
7
29
1
1 15
~
0 1 6
0 2
6
1
1
0
0
0
7
1
1
0
1
0
0
0
0
29
1 15
1 6
0
1
7
Ранг Q = 4 , отже, система повністю спостережувана.
б) побудуємо асимптотичний ідентифікатор
~ ( t ) [ A lC ]x
~(t )
x
із заданим багаточленом
n ( ) ( 1 ) ( 2 ) ( 3 ) ( 4 ) = ( 1) 2 ( 2) 2 =
= 4 6 3 13 2 12 4 .
Отже, 1 6 , 2 13 , 3 12 , 4 4 .
Знайдемо коефіцієнти характеристичного багаточлена матриці
А:
1
A E
2
4 4
2
0
0
3
0
4
2
0
3 1
0
4 3 3 21 2 23 24 .
3
Отже, 1 3 , 2 21 , 3 23 , 4 24 .
53
Обчислимо компоненти вектора l за формулами:
l n i 1 i i , i 1, 2, 3, 4 .
l 1 4 4 4 24 20 ;
l 2 3 3 12 23 35 ;
l 3 2 2 13 21 34 ;
l4 1 1 6 3 3 .
Отже, маємо
20
35
l
34
3
.
54
5 РЕКОМЕНДОВАНА ЛІТЕРАТУРА
5.1 А.Г. Александров. Оптимальні і адаптивні системи. – М.:
Высшая школа, 1989. – 263 с.
5.2 Б.Н. Бублик, Н.Ф. Кириченко. Основы теории управления. –
К.: Вища школа, 1975. – 328 с.
5.3 Ф.Р. Гантмахер. Теория матриц. – М.: Наука, 1967. – 576 с.
5.4 Ф.П. Васильев. Численные методы решения экстремальных
задач. – М.: Наука, 1998. – 552 с.
5.5 Л.С. Понтрягин, В.Г. Болтянский, Р.В. Гамкрелидзе, Е.Ф.
Мищенко. Математическая теория оптимальныч процессов. – М.:
Наука, 1983. – 392 с.