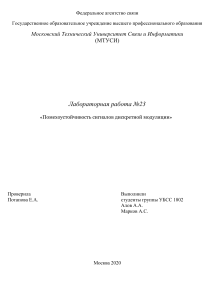
Теория связи Конспект лекций 1. Цели и задачи изучения 1.1. Цель преподавания дисциплины состоит в изучении основных законо- мерностей и методов передачи информации по каналам связи; изучаются методы анализа и синтеза сообщений, сигналов и помех с точки зрения их влияния на помехоустойчивость и пропускную способность систем электросвязи, вопросы оптимизации систем связи. 1.2. В результате изучения курса студент должен знать физические и информационные характеристики, математические модели сообщений, сигналов и помех, дискретных и непрерывных каналов связи; временное, спектральное и векторное представление сигналов связи; основные преобразования сигналов электросвязи в нелинейных и параметрических цепях; основные методы и принципы аппаратурной реализации для эффективной передачи и приёма дискретных и непрерывных сообщений. уметь рассчитывать вероятностные, числовые, физические характеристики сообщений, сигналов и помех, каналов передачи информации; находить форму и спектры сигналов на выходе нелинейных и параметрических цепей; выполнять сравнительный анализ методов передачи и приёма дискретных и непрерывных сигналов . иметь навыки по применению измерительной аппаратуры (и средств вы- числительной техники) для количественной оценки характеристик сигналов и помех, при преобразовании их в нелинейных и параметрических цепях, в каналах связи и основных функциональных устройствах систем передачи информации; анализа схем, содержащих нелинейные и параметрические элементы; анализа преобразования сообщений и сигналов в системах связи. 2 Задачи курса 1. Математическое описание сигналов. 2. Преобразование детерминированных и случайных сигналов в линейных и нелинейных цепях. 3. Аналоговые, дискретные и импульсные виды модуляции и детектирования. 4. Теория согласованной фильтрации дискретных сигналов. 5. Кодовые методы обнаружения и исправления ошибок дискретных сигналов. 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 Энергетический спектр случайного процесса Передача информации в радиотехнических системах связана со спектральными преобразованиями сигналов. Но если спектральные характеристики детерминированных сигналов достаточно просто определяются преобразованием Фурье , где – детерминированная функция, описывающая сигнал, – его спектр, т.е. распределение комплексных амплитуд по частоте, то для случайного процесса понятие комплексной амплитуды отсутствует. И тем не менее для случайного процесса можно ввести удобную спектральную характеристику. Рассмотрим эргодический центрированный случайный процесс. Если выбрать из ансамбля реализаций процесса какую-либо конкретную реализацию (фотографию процесса) достаточно большой длительности (рис. 5.5), то она представляет детерминированную функцию (мы ее 96 наблюдаем и нам известны все изменения случайного процесса). Поэтому к такой реализации можно формально применить преобразование Фурье и вычислить ее спектр . Найдем энергию рассматриваемой реализации. Согласно равенству Парсеваля энергия реализации длительностью равна . (7.1) Очевидно, при энергия реализации неограниченно возрастает. Поэтому целесообразно перейти от энергии реализации к средней мощности на интервале . Для этого раз- . (7.2) делим обе части равенства (7.1) на Отношение представляет собой спектральную плотность средней мощности, т.е. среднюю мощность, приходящуюся на единицу полосы частот и имеет размерность . Функция , (5.59) характеризует энергетический спектр, т.е. распределение средней мощности по частоте. На рис. 5.6 изображен энергетический спектр случайного процесса. Отметим некоторые свойства функции энергетического спектра: – энергетический спектр тельной функцией частоты ; является вещественной неотрица- 97 – энергетический спектр является четной функцией частоты, т.е. (кривая 1 на рис. 5.5). На этом основании часто используют функцию называемую односторонним энергетическим спектром (кривая 2 на рис. 5.6). Так как мы рассматриваем центрированный случайный процесс, т.е. процесс у которого исключено математическое ожидание (постоянная составляющая), очевидно средняя мощность любой его реализации равна дисперсии процесса. Тогда можно записать . (7.3) Иными словами, дисперсия процесса равно площади под кривой . В заключение отметим, что в технических расчетах вместо часто используют энергетический спектр как функцию циклической частоты (7.4) Для ответа на вопрос, рассмотрим сначала теорему Винера– Хинчина. Энергетический спектр и автокорреляционная функция случайного процесса являются неслучайными функциями, связанными между собой. Установим эту связь. Рассмотрим реализацию случайного процесса длительностью и ее копию , сдвинутую на интервал времени . Известно, что энергетический спектр и автокорреляционная функция детерминированного сигнала связаны между собой парой преобразований Фурье. Тогда с учетом предположения о том, что реализация ее копия нам известны, можно записать: и 98 . Разделим обе части этого равенства на , и устремим (7.5) . Тогда в соответствии с выражением автокорреляционной функции левая часть равенства (7.5) представ- ляет собой автокорреляционную функцию . Учитывая функцию характеризующую энергетический спектр случайного процесса , равенство (1) можно представить следующим образом: . (7.6) Но это есть обратное преобразование Фурье, связывающее АКФ случайного процесса с его энергетическим спектром. Очевидно, если существует обратное преобразование, значит, существует и прямое преобразование Фурье , (7.7) связывающее энергетический спектр с АКФ. Таким образом, АКФ случайного процесса и его энергетический спектр связаны между собой парой преобразований Фурье. Впервые эта связь была установлена советским математиком А. Хинчиным и независимо от него американским ученым Н. Винером. Поэтому соотношения (7.6) и (7.7) носят название теоремы Винера–Хинчина. Так как автокорреляционная функция и энергетический спектр являются вещественными четными функциями, можно отказаться от комплексной формы записи преобразования Фурье и перейти к другой форме: , (7.8) . (7.9) Из этих выражений следует: , (7.10) 99 . Но (7.11) , откуда В случае, когда энергетический спектр описывается функцией циклической частоты выражения (7.8) – (7.11) приобретают вид: , , (7.12) . (7.13) , (7.14) . (7.15) Эффективная ширина спектра и интервал корреляции. При спектральных преобразованиях случайных процессов важное значение приобретает ширина спектра процесса. Эффективная ширина энергетического спектра определяется следующим образом: , (7.16) или . (7.17) Этому определению можно дать графическую интерпретацию. Рисунок 1. 100 На рис. 1 изображена кривая одностороннего энергетического спектра. Построим прямоугольник с площадью, равной площади по кривой , одна сторона которого составляет величину случае (в данном ). Тогда вторая сторона прямоугольника будет характеризо- вать эффективную ширину энергетического спектра выражение (10) в следующем виде: . Представим . Левая сторона этого равенства представляет собой среднюю мощность случайного процесса с равномерным энергетическим спектром в пределах полосы частот , а правая – среднюю мощность рассматриваемого случайного процесса. Тогда эффективную ширину спектра рассматриваемого случайного процесса можно трактовать как ширину спектра процесса с равномерной плотностью мощности при равенстве средних мощностей обоих процессов. Как подчеркивалось выше, автокорреляционная функция случайного процесса характеризует степень статистической связи между значениями процесса, разделенными интервалом времени . При этом, для эргодических процессов, которые изучаются в радиотехнике, АКФ стремится к нулю при неограниченном возрастании . Очевидно, при определенном значении , значения случайного процесса и можно считать статистически несвязанными (некоррелированными). Значение , при ко- тором значения случайного процесса и становятся статистически несвязанными, называется интервалом корреляции. Интервал корреляции определяется в соответствии с выражением: , где (14) – нормированная автокорреляционная функция. Знак модуля в (14) введен для случая, когда может принимать отрицательные значения. На рис. 2 приведена графическая интерпретация понятия интервала корреляции. Интервал корреляции представляет собой сторону прямоугольника, по площади равному площади под кривой при : 101 Рисунок 2. Установим связь между эффективной шириной спектра и интервалом корреляции в предположении, что , а функция корреляции представляет собой неотрицательную монотонно убывающую функцию, что позволяет в (14) полагать ведение и . Найдем произ- с учетом (12) и (14). . Подставляя в это выражение формулы (6) и (7) после несложных преобразований получим: . (15) Аналогично, используя выражения (10), (11), (13) и (14), можно получить: . (16) Таким образом, произведение эффективной ширины спектра и интервала корреляции представляет собой постоянную величину. Из этого вытекает, что чем шире энергетический спектр, тем меньше интервал корреляции между его значениями и наоборот. Но ширина энергетического спектра определяет скорость изменения значений случайного процесса: чем больше процесса. (или чем меньше ), тем выше скорость изменения 1. Прохождение случайных процессов через линейные инерционные устройства. Нормализация процесса на выходе узкополосной линейной инерционной цепи. 102 Рассмотрим линейную инерционную систему с известной передаточной функцией k ( j ) или импульсной реакцией g (t ) . Пусть на вход такой системы поступает стационарный случайный процесс с заданными характеристиками: плотностью вероятности (x) , корреляционной функцией B x ( ) или энергетическим спектром G x ( ) . Определим характеристики процесса y (t ) на выходе системы: ( y) , B y ( ) и G y ( ) . k ( j ) g (t ) y(t ), ( y) x(t ), ( x) Gy ( ) G x ( ) Рис. 1 Наиболее просто можно найти энергетический спектр процесса на выходе системы. Действительно, отдельные реализации процесса на входе являются детерминированными функциями, и к ним применим аппарат Фурье. Пусть iT (t ) - усеченная реализация длительности Т случайного процесса на входе, а T siTx ( j ) iT (t )e jt dt (1.1) 0 - ее спектральная плотность. Спектральная плотность реализации iT (t ) на выходе линейной системы будет равна: (1.2) siTy ( j ) siTx ( j ) k ( j ) Энергетический спектр процесса на выходе будет определиться выражением: s ( j ) 2 iTy G y ( ) lim m T T (1.3) 2 s ( j ) 2 2 m lim iTx k ( j ) Gx ( ) k ( ) T T т.е. будет равен энергетическому спектру процесса на входе, умноженному на квадрат амплитудно-частотной характеристики системы, и не будет зависеть от фазо - частотной характеристики. Корреляционная функция процесса на выходе линейной системы может быть определена как преобразование Фурье от энергетического спектра: 103 1 By ( ) 2 2 j Gx ( )k ( ) e d (1.4) Следовательно, при воздействии случайного стационарного процесса на линейную систему на выходе получается также стационарный случайный процесс с энергетическим спектром и корреляционной функцией, определяемыми выражениями (1.3) и (1.4). Дисперсия выходного процесса системы будет равна: 1 y2 B y (0) Gx ( )k 2 ( )d (1.5) 2 Закон распределения вероятностей случайного процесса на выходе линейной инерционной системы отличается от закона распределения на входе, и определение его является весьма сложной задачей, за исключением двух частных случаев: Если случайный процесс воздействует на узкополосную линейную систему, полоса пропускания которой много меньше ширины спектра, то на выходе системы имеет место явление нормализации закона распределения. Это явление заключается в том, что закон распределения на выходе узкополосной системы стремится к нормальному независимо от того, какое распределение имеет широкополосный случайный процесс на входе. Физически это можно объяснить следующим образом. Процесс на выходе инерционной системы в некоторый момент времени представляет собой суперпозицию отдельных откликов системы на хаотические воздействия входного процесса в различные моменты времени. Чем уже полоса пропускания системы и шире спектр входного процесса, тем большим числом элементарных откликов образуется выходной процесс. Согласно же центральной предельной теореме теории вероятностей закон распределения процесса, представляющего собой сумму большого числа элементарных откликов, будет стремиться к нормальному. Если процесс на входе линейной системы имеет нормальное (гауссово) распределение, то он остается нормальным и на выходе системы. В этом случае изменяются только корреляционная функция и энергетический спектр процесса. Преобразование гауссовского случайного сигнала в безынерционной нелинейной цепи с квадратичной характеристикой. 104 Рассмотрим квадратичное преобразование случайного процесса которое осуществляется, например, безынерционным квадратичным детектором. Обратные функции при квадратичном преобразовании имеют вид где для краткости аргумент времени опущен. При этом и (3.4.22) Используя (3.4.15), (3.4.15) для одномерной плотности вероятности случайного процесса дим нахо- (3.4.23) Если случайный процесс на входе имеет нормальное распределение вероятностей (3.4.24) то, используя (3.4.23) , для процесса на выходе квадратичного преобразователя получим (3.4.25) Для нормального случайного процесса с нулевым средним значением выражение (3.4.25) упрощается: (3.4.26) Графики полученной плотности вероятности для различных значений показаны на рис 3.23. 105 1. Распределение огибающей и фаз узкополосного гауссовского случайного процесса с нулевым математическим ожиданием. Во многих радиотехнических задачах возникает необходимость учета случайного характера огибающих и начальных фаз узкополосных случайных процессов. При этом в качестве узкополосного процесса чаще всего выступает нормальный случайный процесс. Пусть – узкополосный случайный процесс, мгновенные значения которого распределены по нормальному закону с нулевым математическим ожиданием . Этому процессу соответствует комплексный случайный процесс , причем комплексно-сопряженный процесс также распределен по нормальному закону с нулевым математическим ожиданием и той же дисперсией, т.е. . Так как значения и некоррелированы, а для нормальных случайных процессов некоррелированность означает и статистическую независимость, то это значит, что двумерная плотность вероятности . (5.95) Для определения законов распределения огибающей и начальной фазы необходимо перейти от декартовой к полярной системе ко- 106 ординат (рис. 5.10) связь между двумя координатными системами определяется следующими соотношениями: ; . (5.96) Выделим бесконечно малую область окрестности конца вектора в декартовой системе координат (рис. 5.10а). Очевидно, площадь этой области будет равна дания конца вектора в , а вероятность попа- в эту область . При переходе к полярной системе координат область мируется в область вектора (5.97) трансфор- (рис. 5.10б). Вероятность попадания конца в эту область будет равна: . (5.98) Так как при переходе из одной системы координат в другую вероятности попадания конца вектора в элементарные области должны быть равны, приравняем правые части (5.97) и (5.98) . (5.99) Подстановка (5.95) и (5.96) в (5.99) с учетом того, что ; после несложных преобразований дает . (5.100) Выражение (5.100) представляет собой двумерную плотность распределения значений огибающей и начальной фазы узкополосного СП. Для того, чтобы найти одномерную плотность распределения огибающей необходимо (5.100) проинтегрировать по всем значениям фазы от до . (5.101) Таким образом, значения огибающей узкополосного СП распределены по закону Рэлея. 107 Аналогично для определения одномерной плотности распределения значений начальной фазы проинтегрируем (5.100) по всем значениям от до . Подстановка в это выражение формулы (5.100) с учетом того, что , (условие нормировки), дает: . (5.102) Отсюда следует, что значения фазы узкополосного СП распределены по равномерному закону в пределах от до . Рассмотри случай, когда случайный процесс представляет сумму узкополосного детерминированного сигнала , и случайного процесса (5.84). Представляя суммарный процесс в комплексной форме и проводя аналогичные рассуждения, можно получить выражение для одномерной плотности вероятности огибающей , где (5.103) – модифицированная функция Бесселя нулевого порядка. Выражение (5.103) представляет собой обобщенный закон Рэлея или закон Райса. На рис. 5.11 представлены кривые плотности вероятности огибающей суммарного процесса. Из рисунка следует, что форма кривой и ее положение зависит от отноше-ния , т.е. от отношения амплитуды сигнала к средне-квадратичному значению шума, в качестве которого здесь выступает процесс (5.84). При кривая закона Райса приближается к нормальному закону. 108 Приём дискретных сигналов с использованием согласованных фильтров Решение проблемы повышения помехозащищённости систем связи и управления достигается использованием различных методов и средств, в том числе и сигналов сложной формы (с большой базой). Широкое практическое применение получили сложные сигналы на основе дискретных кодовых последовательностей, которые представляют собой последовательности символов di длительностью э, принимающих одно из двух значений +1 или –1. Такие сигналы легко формируются и обрабатываются с использованием элементов цифровой и вычислительной техники. Сложные сигналы должны удовлетворять ряду требований для достижения наибольшей достоверности их приёма: а) корреляционная функция должна содержать значительный максимум (пик); б) взаимная корреляционная функция (ВКФ) 1 K ij ( ) T T S (t ) S i j (t )dt (2.21) 0 любой пары сигналов из используемого ансамбля, определяющая степень их ортогональности, должна быть близка к нулю при любом . Однако на практике для реальных сигналов последнее условие не может быть выполнено. Поэтому важно обеспечить возможно большее отношение rii() / rij() используемых сигналов, оно и будет определять помехозащищённость приёма сигналов. Отличительная особенность ВКФ в том, что она не является чётной функцией аргумента , т.е. Kuv () Kuv (-) , а максимальный выброс достигается не обязательно при =0. Известно, что сигнал на выходе согласованного фильтра в произвольный момент времени характеризуется интегралом свёртки вида t y (t ) g (t ) S (t )d , где g(t) – импульсная характеристика фильтра; 109 Выходной сигнал СФ совпадает по форме с функцией корреляции входного сигнала, но последняя сдвинута вправо на величину t0, т.е. y(t) = aKss (t - t0) (2.22) где a – множитель пропорциональности; t0 – сдвиг в сторону запаздывания. На практике величину t0 выбирают равной длительности сигнала, т.е. t0 = T. Для корреляционной функции дискретного сигнала общего вида применима формула K ( n) u j j uj n , (2.23) здесь n указывает количество элементов, на которое осуществляется сдвиг (n – целое число, положительное, отрицательное или нуль), так как важнейшей операцией при корреляционной обработке дискретных сигналов с использованием согласованного фильтра является поэлементный сдвиг такого сигнала. Взаимная корреляционная функция двух дискретных сигналов по аналогии с корреляционной функцией одиночного сигнала определяется формулой Kuv (n) u j j v j n . (2.24) Влияние помехи в линии связи на передаваемый сигнал будет проявляться в изменении знака (полярности) элемента дискретного сигнала, т. е. в переходах вида 1 1 и 1 1. Это будет приводить к изменению (деформации) корреляционной функции – уменьшению основного лепестка, увеличению боковых выбросов и, следовательно, к снижению помехоустойчивости приёма. Поэтому целесообразно выбрать оптимальную величину порога решающей схемы приёмника, минимизирующую среднюю вероятность ошибки. При равновероятной передаче сообщений оптимальный порог должен выбираться как среднее значение между уровнем основного лепестка и максимальным уровнем выброса ВКФ. Согласованный фильтр для дискретных последовательностей практически может быть реализован в виде линии задержки с отводами (с общим временем задержки, равным длительности сигнала Т), фазовращателей (инверторов) в отводах и суммирующей схемы, на выходе которой возникает импульс, равный сумме амплитуд всех элементов сигнала. Примечание: нетрудно видеть, что сигнал на выходе сумматора будет иметь вид ступенчатой функции. После сумматора 110 может быть установлен интегратор, например, простейшая RC-цепочка для “сглаживания” формы сигнала. Анализ эффекта согласованной фильтрации дискретных сигналов Решение проблемы повышения помехозащищенности систем связи и управления достигается использованием различных методов и средств, в том числе и сигналов сложной формы (с большой базой). Широкое практическое применение нашли сигналы на основе дискретных кодовых последовательностей, которые представляют собой последовательности символов длительностью Т, принимающих одно из двух значений: или . Такие сигналы легко формируются и обрабатываются с использованием элементов цифровой и вычислительной техники. Сложные сигналы должны удовлетворять ряду требований для достижения набольшей достоверности их приема: а) корреляционная функция должна содержать значительный максимум (пик); б) взаимная корреляционная функция любой пары сигналов из используемого ансамбля, определяющая степень их ортогональности, должна быть близка к нулю. Достоинства и недостатки такие же, как и у ИКМ сигналов. Влияние помехи в линии связи на передаваемый сигнал будет проявляться в изменении знака (полярности) элемента дискретного сигнала, т.е. в переходах вида 1 -1, -1 1. При приеме с помощью согласованного фильтра это будет приводить к изменению формы сигнала на его выходе – уменьшению основного лепестка, увеличению боковых выбросов и, следовательно, к снижению помехоустойчивости приема. Использование для передачи сложных сигналов обеспечивает эффективную защиту от импульсных, а иногда и от сосредоточенных помех. Изобразим форму заданных сигналов при передаче по каналу связи символов «1» и «0» в предположении, что , при этом длительность каждого из сигналов равна nT , где n 11 – число элементов сложного сигнала: 111 Рис. 1. Форма заданных сигналов при передаче по каналу связи ИМПУЛЬСНАЯ ХАРАКТЕРИСТИКА СОГЛАСОВАННОГО ФИЛЬТРА Импульсной характеристикой согласованного фильтра (СФ) называется реакция СФ при подаче на его вход - функции. Для СФ импульсная характеристика - зеркальное отображение сигнала, с которым он согласован, сдвинутое на время . Импульсная характеристика фильтра, согласованного с Рис.11.1. Форма импульсной характеристики СФ : 112 СХЕМА СОГЛАСОВАННОГО ФИЛЬТРА ДЛЯ ПРИЕМА СЛОЖНЫХ СИГНАЛОВ. ФОРМА СИГНАЛОВ НА ВЫХОДЕ СОГЛАСОВАННОГО ФИЛЬТРА ПРИ ПЕРЕДАЧЕ СИМВОЛОВ «1» И «0». Приведем схему СФ для заданного сигнала и опишем, как формируется (поэлементно) сигнал на его выходе. Рис. 2 Структурная схема согласованного фильтра СФ для дискретных последовательностей может быть реализован в виде линии задержки с отводами (с общим временем задержки, равным длительности сигнала Тс), фазовращателей (инверторов) в отводах и суммирующей схемы, на выходе которой возникает импульс, равный сумме амплитуд всех элементов сигнала. Устройства, реализующие согласованную фильтрацию дискретных сигналов, могут быть выполнены также и на основе регистра сдвига с количеством разрядов, равным количеству элементов в кодовой последовательности сигнала. В нем имеются перемножители и сумматоры. На вход перемножителей поступает принимаемая последовательность с разрядов регистра сдвига и опорная последовательность, совпадающая по виду с импульсной характеристикой входного сигнала, с эталонного регистра. Сигналы с выходов всех разрядов перемножителей поступают на сумматор. Очевидно, что максимальный отклик на выходе сумматора будет наблюдаться тогда, когда кодовая последовательность полностью будет введена в регистр сдвига, т.е. в момент окончания входного сигнала. Сигнал на выходе сумматора будет иметь вид ступенчатой функции. После сумматора может быть установлен интегратор, например, простейшая RC-цепочка, для «сглаживания» сигнала. Т.к. СФ является коррелятором, то при подаче на его вход сигнала S(t), с которым он согласован, на выходе получим функцию корреляции входного сигнала: 113 При воздействии на вход СФ флуктуационной помехи, функция взаимной корреляции равна нулю, т.к. сигнал и помеха являются независимыми функциями времени. Но так как для вычисления функции взаимной корреляции требуется бесконечно большое время интегрирования, а в нашем случае оно ведется за время T, то здесь она отлична от нуля. При передаче сигнала «1» передается последовательность вида: Пример расчета формы сигнала на выходе СФ: 0 1 -1 -1 1 1 -1 -1 1 -1 1 -1 1 -1 -1 1 1 -1 -1 1 -1 1 -1 1 1 1 1 1 1 1 1 1 1 1 11 0 1 -1 -1 1 1 -1 -1 1 -1 1 -1 1 -1 -1 1 1 -1 -1 1 -1 1 -1 -1 1 -1 1 -1 -1 -1 1 -1 -1 4 2 0 1 -1 -1 1 1 -1 -1 1 -1 1 -1 1 -1 -1 1 1 -1 -1 1 -1 1 -1 -1 -1 -1 -1 1 1 -1 -1 1 3 3 0 1 -1 -1 1 1 -1 -1 1 -1 1 -1 1 -1 -1 1 1 -1 -1 1 -1 1 -1 1 -1 1 -1 1 1 -1 -1 0 Таблица 1 114 На выходе согласованного фильтра получаем под действием сигнала функцию корреляции сигнала, сдвинутую на длительность входного сигнала. При этом функция имеет значительный максимум (пик) (рис. 3). Рассчитаем форму помехи в предположении, что на вход фильтра поступает непрерывная последовательность знакопеременных символов: (t ) 1 0 1 0 1 0 1 0 1 0 1 1 1 1 1 1 1 1 1 1 1 1 Расчетные данные сведены в таблицу 2. Таблица 2 Рис. 3 Временная диаграмма сигнала на выходе согласованного фильтра форма сигнала S1 на выходе согласованного фильтра сигнал на выходе согласованного фильтра при поступлении на вход флуктуационной помехи ОПТИМАЛЬНЫЕ ПОРОГИ РЕШАЮЩЕГО УСТРОЙСТВА ПРИ СИНХРОННОМ И АССИНХРОННОМ СПОСОБАХ ПРИНЯТИЯ РЕШЕНИЯ ПРИ ПРИЕМЕ СЛОЖНЫХ СИГНАЛОВ СОГЛАСОВАННЫМ ФИЛЬТРОМ Изобразим графики выходных сигналов на выходе СФ при передаче символов “1” и “0”. 115 Рис. 4 Выходные сигналы согласованного фильтра при поступлении на вход сигналов «1» и «0» При синхронном способе приема сигналов в решающем устройстве ставится один порог , т.к. принятие решения происходит в момент окончания сигнала на входе. Z(t) СФ Y(t) S1 РУ S2 Устройство синхронизации Рис.5 Структурная схема приема сообщений синхронным способом РУ в момент окончания сигнала на входе СФ проверяет фазу полученного после СФ сигнала и соответственно выносит решение в пользу или . При асинхронном способе приема сигналов в РУ ставят два порога: и (один для приема символа «1», другой – «0»). 116 Z(t) СФ Y(t) S1 РУ S2 Uп1 Uп2 Рис.13.3. Структурная схема приема сообщений асинхронным способом где - главный максимум, - побочный максимум. РУ сравнивает полученный сигнал с выхода СФ с пороговыми напряжениями. Если Y t U Ï 1 , решение принимается в пользу сигнала , если Y t U Ï 2 - в пользу . Если не выполняется ни одно из этих условий, то решение не принимается. На рис.4 изображены пороговые уровни решающей схемы для случая асинхронного способа принятия решения. U Ï 0 - пороговый уровень решающей схемы в случае синхронного способа принятия решения. пороговые уровни решающей схемы в случае асинхронного способа принятия решения. Более помехоустойчивым является синхронный способ приема сигналов. Это объясняется тем, что решение принимается в момент окончания сигнала на входе СФ, а, следовательно, в этом случае мощность помехи меньше. ЭНЕРГЕТИЧЕСКИЙ ВЫИГРЫШ ПРИ ПРИМЕНЕНИИ СОГЛАСОВАННОГО ФИЛЬТРА СФ обеспечивает при флуктуационной помехе в канале типа «белого шума» в момент окончания сигнала на своем выходе максимально возможное отношение пиковой мощности сигнала к мощности помехи. Выигрыш в отношении сигнал/шум на выходе СФ по сравнению с входом равняется базе сигнала: ( B 2Fñ Tñ ), т.е. 117 q PÑ / PÏ âûõ ÐÑ / ÐÏ âõ 2 FÑ TÑ , где TÑ N T - длительность сигнала (N- число элементов в дискретной последовательности, в нашем случае N 11 ), 1 - ширина спектра сигнала. FÑ 2Ò 1 Тогда q 2 N T N 11 . 2Ò Таким образом, выигрыш, обеспечиваемый СФ при приеме дискретных последовательностей применительно к данному варианту, составляет 11 раз. Следовательно, путем увеличения длины дискретных последовательностей, отображающих символы сообщений «1» и «0», можно обеспечить значительное повышение отношения сигнал/шум на выходе решающей схемы приемника и, соответственно, повышение помехоустойчивости (достоверности) передачи дискретных сообщений. Это будет приводить к снижению скорости передачи сообщений, т.е. реализуется принцип обмена скорости передачи на помехоустойчивость приема путем увеличения энергии элемента сигнала. Кодовые методы обнаружения и исправления ошибок дискретных сигналов Корректирующие коды. Принцип обнаружения и исправления ошибок. Корректирующие коды строятся так, чтобы число комбинаций превышало число сообщений источника . Однако в этом случае лишь комбинаций из общего числа используется для передачи информации. Эти комбинации называются разрешенными, а остальные комбинаций носят название запрещенных. На приемном конце на декодирующем устройстве известно, какие комбинации являются разрешенными и какие – запрещенными. Поэтому, если переданная разрешенная комбинация в результате ошибки преобразуется в некоторую запрещенную комбинацию, то такая ошибка будет обнаружена, а при определенных условиях исправлена. Известно, что ошибки, приводящие к образованию другой разрешенной комбинации, не образуются. Для лучшего понимания сущности обнаружения и исправления ошибок воспользуемся пространственными представлениями. 118 Для обнаружения ошибок все пространство кодовых слов подразделяется на два подпространства – разрешенных и запрещенных комбинаций (кодовых слов). Nразр = 2k Nзапр = 2n – 2k Nразр кодовое слово кодовое слово Nзапр ошибка не обнаружена ошибка обнаружена Рисунок 4. Сущность обнаружения ошибок Следует заметить, что если из-за воздействия помех одна разрешенная кодовая комбинация преобразуется в другую разрешенную кодовую комбинацию, то такая ошибка, хотя она и присутствует, обнаружена не будет. Для исправления ошибок все пространство кодовых слов разбивается на подпространств (непересекающихся). кодовая комбинация, соответствующая этому подпространству кодовое слово кодовое слово кодовая комбинация, соответствующая этому подпространству Рисунок 5. Сущность исправления ошибок В каждом подпространстве находится одна разрешенная комбинация (обозначена кружком «○») и некоторое количество запрещенных из общего количества (обозначенных точками «•»). Все запрещенные кодовые комбинации распределяются по подпространствам по принципу «близости» к разрешенной кодовой комбинации данного подпространства (т.е. отличающиеся в одном или двух и т.д. знаках от разрешенной кодовой комбинации). Исправление ошибок производится в два этапа: 1. Определяется кодовое расстояние между пришедшей кодовой комбинацией и всеми разрешенными кодовыми комбинациями. 119 2. Решение принимается в пользу той разрешенной кодовой комбинции, для которой кодовое расстояние будет наименьшим (т.е. реализуется критерий идеального наблюдателя). Корректирующие коды. Принцип обнаружения и исправления ошибок. Корректирующие (помехоустойчивые) коды – вводят избыточность, чтобы увеличить возможность обнаруживать и исправлять ошибки. Классификация кодов: 1) двоичные (бинарные) или недвоичные; 2) блочные (кодовые комбинации) и непрерывные; 3) равномерные (техника передачи проще и легко синхронизировать) и неравномерные; 4) линейные (избыточные символы – результат линейных операций над информационными символами, бывают циклические, сверточные и др.) и нелинейные (малая длина кодовых слов, используются в специальных предложениях, бывают с постоянным весом, инверсные и др.); 5) простые (примитивные) – все возможные комбинации используются для передачи сообщения (не помехоустойчив); 6) систематические – информационные символы не кодируются и на выходе кодера имеют тот же вид что и на входе; 7) каскадные – параллельное или последовательное включение нескольких помехоустойчивых кодов. Корректирующими называются коды позволяющие обнаруживать и исправлять ошибки. Идею представления корректирующих кодов можно представить с помощью N-мерного куба. Возьмем трехмерный куб (рис.2), длина ребер, в котором равна одной единице. Вершины такого куба отображают двоичные коды. Минимальное расстояние между вершинами определяется минимальным количеством ребер, находящихся между вершинами. Это расстояние называется кодовым (или хэмминговым) и обозначается буквой d. Рисунок 2. Представление двоичных кодов с помощью куба 120 Иначе, кодовое расстояние это то минимальное число элементов, в которых одна кодовая комбинация отличается от другой. Для определения кодового расстояния достаточно сравнить две кодовые комбинации по модулю 2. Так, сложив две комбинации 10110101101 11001010101 01111111000 определим, что расстояние между ними d=7. Для кода с N=3 восемь кодовых комбинаций размещаются на вершинах трехмерного куба. Такой код имеет кодовое расстояние d=1, и для передачи используются все восемь кодовых комбинаций 000,001,..,111. Такой код является не помехоустойчивым, он не в состоянии обнаружить ошибку. Если выберем комбинации с кодовым расстоянием d=2, например, 000,110,101,011, то такой код позволит обнаруживать однократные ошибки. Назовем эти комбинации разрешенными, предназначенными для передачи информации. Все остальные 001,010,100,111 - запрещенные. Любая одиночная ошибка приводит к тому, что разрешенная комбинация переходит в ближайшую, запрещенную комбинацию (см. рисунок 2). Получив запрещенную комбинацию, мы обнаружим ошибку. Выберем далее вершины с кодовым расстоянием d=3 Такой код может исправить одну одиночную ошибку или обнаружить две ошибки. Таким образом, увеличивая кодовое расстояние можно увеличить помехоустойчивость кода. В общем случае кодовое расстояние определяется по формуле d=t + l + 1 где t - число исправляемых ошибок , l - число обнаруживаемых ошибок. Обычно l>t. Большинство корректирующих кодов являются линейными кодами. Линейные коды - это такие коды, у которых контрольные символы образуются путем линейной комбинации информационных символов. Кроме того, корректирующие коды являются групповыми кодами. Групповые коды (Gn) - это такие коды, которые имеют одну основную операцию. При этом, должно соблюдаться условие замкнутости (то есть, при сложении двух элементов группы получается элемент принадлежащий этой же группе ). Число разрядов в группе не должно увеличиваться. Этому условию удовлетворяет операция поразрядного сложения по модулю 2. В группе, кроме того, должен быть нулевой элемент. Пример: Ниже приведены кодовые комбинации, являющиеся группой или нет. 121 1011 – не группа, так как нет нулевого эле- 1) 1101 1110 0111 мента 2) 0000 1101 1110 0111 – не группа, так как не соблюдается условие замкнутости (1101+1110=0011) 3) 000 001 010 011 100 101 110 111 - группа 4) 000 001 010 111 - подгруппа Большинство корректирующих кодов образуются путем добавления к исходной k комбинации r контрольных символов. В итоге в линию передаются n=k+r символов. При этом корректирующие коды называются (n,k) кодами. Как можно определить необходимое число контрольных символов? Для построения кода способного обнаруживать и исправлять одиночную ошибку необходимое число контрольных разрядов будет составлять . Это равносильно известной задаче о минимуме числа контрольных вопросов, на которые могут быть даны ответы вида “да” или “нет”, для однозначного определения одного из элементов конечного множества. Если необходимо исправить две ошибки, то число различных исходов будет составлять Тогда , в этом случае обнаруживаются однократные и двукратные ошибки. В общем случае, число контрольных символов должно быть не меньше Эта формула называется неравенством Хэмминга, или нижней границей Хэмминга для числа контрольных символов. Циклические коды, принцип их построения, обнаружения и исправления ошибок . Среди множества кодовых слов группы G n порядка 2 n можно найти такое подмножество (подгруппу группы Gn ), у которого все строки производящей матрицы образуются путем умножения некоторого многочлена g (x) степени ( n k ) последовательно на 1, x, x 2 ...x k 1 . Такие подгруппы называются циклическими. Следовательно, для определения циклической подгруппы достаточно знать некоторый производящий многочлен g (x) , степень которого равна числу проверочных символов r n k . Все остальные строки производящей матрицы связаны с производящим многочленом жесткой зависимостью. Кодовые слова, не входящие непосредственно в производящую матрицу, образуются, как и в любом систематическом коде, суммированием строк производящей матрицы по модулю 2 122 во всевозможных сочетаниях. Все кодовые слова циклического кода делятся без остатка на производящий многочлен g ( x) , так как этот многочлен входит в каждое слово в качестве сомножителя. Частное от деления образует многочлен степени ( k 1 ), представляющий собой запись в виде многочлена информационных элементов данного кодового слова. Для построения проверочной матрицы циклического кода необходимо найти многочлен 1 xn , h( x ) g ( x) (2.1) который образует первую строку проверочной матрицы. Остальные ее строки находятся умножением многочлена h(x ) последовательно на x, x 2 ,...x k 1 . Таким образом, циклическими называются групповые коды, образуемые путем умножения каждого кодового слова k-символьного кода, выраженного в виде многочлена Q(x) , на некоторый производящий многочлен g (x) степени ( n k ). Поэтому в теории циклических кодов кодовые слова часто представляют в виде многочленов an 1x n 1 an 2 x n 2 ... a2 x 2 a1x a0 , где коэффициенты a i принимают значения либо 0, либо 1. Умножение многочленов производится по обычным правилам алгебры, но с приведением подобных членов' по модулю 2. Например: умножение в виде многочленов в двоичном виде 3 x 2x 1 x 1 3 x 0 x 1 5 x 0 x3 x2 1011 101 1011 1011 100111 x5 0 0 x2 x 1 x5 x 2 x 1 (2.2) Деление многочленов производится также с учетом операции сложения по модулю 2. 5 2 x2 1 x5 0 03 x x 1 3 x 0 x x x 1 3 2 x3 x x 1 x 0 x 2 x2 0 1 x 0 1 000 100111 101 101 1011 111 101 101 101 000 123 Из способа построения циклического кода следует, что при циклическом сдвиге символов слова циклического кода образуется другое кодовое слово, принадлежащее данному коду (образуется другое разрешенное слово). Например, если кодовое слово 0001011 принадлежит данному циклическому коду, то и слово 0010110 также принадлежит этому коду, так как оно может быть получена умножением первого слова на x. Для того, чтобы построить циклический код, удовлетворяющий определенным требованиям (исправляющий или обнаруживающий ошибки заданной кратности), необходимо соответствующим образом выбрать производящий многочлен. Если код предназначен для исправления и обнаружения независимых ошибок, то необходимо обеспечить соответствующее кодовое расстояние между кодовыми словами циклического кода. Лучшими кодами, обеспечивающими эффективную борьбу с независимыми ошибками, являются циклические коды Боуза-Чоудхури. Производящий многочлен для этих кодов находится по заданному кодовому расстоянию и числу символов в кодовом слове. Необходимое количество проверочных разрядов определяется выражением r (d 1) M , 2 где число М определяется из соотношения n 2 M 1 . Тогда производящий многочлен представляет собой наименьшее общее кратное (НОК) произведения неприводимых многочленов M i (x ) , где i 1,3,5,...d 2 - порядок многочлена g(x) = НОК[M1(x)M3(x)Mr-2], Неприводимым называется многочлен, не делящийся ни на какой многочлен, степень которого меньше M . Некоторые неприводимые многочлены приведены в таблице. Широко распространены также машинные методы отбора производящих многочленов. № 1 2 3 4 5 6 7 Неприводимые многочлены над GF(2) [2] Многочлен № Степень Многочлен Степень 2 x2 + x +1 15 16 x16+ x12+ x3+ x +1 3 x3 + x +1 16 17 x17+ x3+1 4 x4 + x +1 17 18 x18+ x7+1 5 x5 + x2 +1 18 19 x19+ x5+ x2+ x +1 6 x6 + x +1 19 20 x20 + x3 +1 7 x7 + x3 +1 20 21 x21 + x2 +1 8 x8 + x4 + x3 + x2 +1 21 22 x22 + x +1 124 Декодирование циклических кодов При декодировании кодового слова циклического кода также производится его деление на производящий многочлен. Неискаженное кодовое слово должно делиться на производящий многочлен без остатка. Наличие остатка указывает на искажение слова. Для определения искаженного символа кода и его исправления необходимо с полученным остатком произвести еще ряд операций. Иногда исправляются только одиночные ошибки, так как с увеличением кратности исправляемых ошибок резко усложняется декодирующее устройство, что затрудняет его реализацию. Операции деления кодовых слов на производящий многочлен в процессе кодирования и декодирования производятся с помощью регистров сдвига с обратными связями. Обратные связи располагаются в соответствии с заданным производящим многочленом и осуществляются через сумматоры по модулю 2. Коды Боуза-Чоудхури используются в каналах с независимыми ошибками. Эти же коды способны обнаруживать пакеты ошибок, если их длина не превышает числа проверочных символов кода (под пакетом ошибок понимается группа кодовых символов, ошибки внутри которой располагаются на расстоянии, не превышающем определенного числа кодовых символов). Однако, для обнаружения и исправления пакетов ошибок лучше использовать специальные кода, которые наиболее эффективны в каналах связи с группирующимися (коррелированными) ошибками. К числу таких кодов относятся циклические коды Файра. Длина пакета обнаруживаемых таким кодом ошибок значительно превышает число проверочных символов кодового слова. Кодирование и декодирование кодов Файра осуществляется также с помощью регистров сдвига с обратными связями. Эффективность циклических кодов, как правило, увеличивается с увеличением длины кодовых слов. Поэтому в современной практике иногда применяются циклические коды, длина кодовых слов которых n 103 . Оптимальные методы декодирования. К оптимальным в том смысле, что они минимизируют среднюю вероятность ошибки Pд p(ai ) p(e / ai ), ai A (2.9) относятся методы декодирования по максимуму апостериорной вероятности (МАВ) и по максимуму правдоподобия (МП). Выбор декодированного варианта принятой последовательности a производится для первого метода по максимальному значению апостериорной вероятности p(ai /xj), а для второго – по максимуму функции правдоподобия p(xj /ai) по всем ai 125 A, где ai - передаваемая кодовая последовательность, A – множество всех передаваемых последовательностей (алфавит), xi = ai +e принимаемая кодовая последовательность, e последовательность ошибок, a декодированный вариант принятой последовательности. Метод МП является частным случаем МАВ при равенстве априорных вероятностей передачи p(ai). Для симметричного канала связи оба эти метода декодирования эквивалентны выбору последовательности a, отличающейся от принятой xi в наименьшем числе символов. Это утверждение положено в основу реализации описанных выше оптимальных методов декодирования. Трудности реализации оптимальных методов декодирования связаны с тем, что декодер должен иметь большую память, равную (или близкую) по объёму числу кодовых слов используемого кода. Поэтому оптимальные методы, как правило, используются для исправления ошибок малой кратности (одиночных ошибок или одиночных пакетов ошибок): это метод стандартной расстановки и метод, основанный на выборе синдрома. Сущность метода, основанного на выборе синдрома, заключается в следующем: 1. До декодирования вычисляются все синдромы ошибок Si (x), исправляемых данным кодом, и сводятся в таблицу вместе с конфигурациями соответствующих ошибок ei(x) , i = 1 … 2n-k. 2. Вычисляется синдром ошибки Sj (x) декодируемого кодового слова. 3. Пошаговым сравнением синдрома Sj (x) с синдромами Si (x), хранящимися в таблице, находится конфигурация ошибки ej(x), соответствующая синдрому Sj (x) . 4. Производится исправление ошибки в принятом кодовом слове суммированием (по модулю 2) этого слова с последовательностью ошибок ej(x). Сложность этой процедуры связана с размерами таблицы, состоящей n-k из 2 строк длины n. Используя свойства циклических кодов и метод стандартной расстановки, можно несколько уменьшить объём таблицы и ускорить сравнение; однако, и в этом случае эти методы практически можно использовать только для коротких кодов или для исправления одиночных ошибок. Декодер Меггита представляет собой синдромный декодер, исправляющий одиночные ошибки, в памяти которого с целью упрощения хранится только один синдром ошибки: S15(x) = x3+1 (соответствует конфигурации ошибки e15(x) = x14 ). Синдромы остальных одиночных ошибок циклически сдвигаются в регистре синдрома до совпадения с S15(x); число циклов сдвига i ( i= 0,1,2...14) плюс единица равно номеру искаженного кодового символа. 126 5. Перечень литературы Авторы Наименование год издания ОСНОВНАЯ Зюко А.Г., Кловский Д.Д., Назаров М.В. Теория электрической связи: Учебник для вузов.М.: "Радио и связь" Филиппов Б.И. Конспект лекций в электронном варианте. 1999 2009 ДОПОЛНИТЕЛЬНАЯ: Зюко А.Г., Кловский Д.Д., Назаров М.В., Финк Л.М. Андреев В.С. Кловский Д.Д., Шилкин В.А. Баскаков С.И. Финк Л.М. Теория передачи сигналов. М.: "Радио и связь" Теория нелинейных электрических цепей. - М.: "Радио и связь" 1986 1982 Теория электрической связи. Сборник задач и упражнений М.: "Радио и связь" 1990 Радиотехнические цепи и сигналы. - М.: "Радио и связь" 1988 Теория передачи дискретных сообщений. - М.: "Сов. радио" 1970 к какой налич. в теме библ. 127