Динамика движения твердого тела, имеющего неподвижную точку
реклама

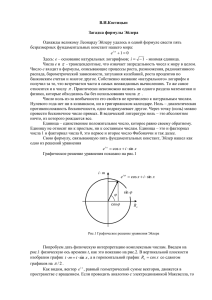
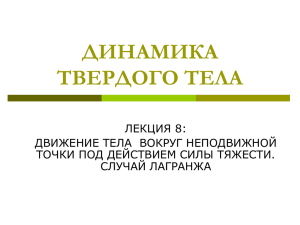
Динамика движения твердого тела, имеющего неподвижную точку Актуальность Движение любого объекта раскладывается на поступательное и сферическое 2 Актуальность Движение любого объекта раскладывается на поступательное и сферическое 3 Актуальность Движение любого объекта раскладывается на поступательное и сферическое 4 Актуальность Движение любого объекта раскладывается на поступательное и сферическое 5 Дифференциальные уравнения движения твердого тела округ неподвижной точки dK O M Oe dt (1) Теорема об изменении кинетического момента K Ox J x p J xy q J xz r , Компоненты вектора кинетического момента в связанной системе координат K Oy J xy p J y q J yz r , K Oz J xz p J yz q J z r. ~ dKO ω K O M Oe dt (2) Теорема об изменении кинетического момента в подвижной системе координат J x p J xy q J xz r J z J y qr J yz r 2 q 2 pJ xy r J xz q M x , J xy p J y q J yz r J x J z rp J xz p 2 r 2 qJ yz p J xy r M y , J xz p J yz q J z r J y J x pq J xy q 2 p 2 r J xz q J yz p M z . (3) Скалярный вид уравнения (2). Уравнения движения твёрдого тела вокруг неподвижной точки 6 Ap C B qr M x , Bq A C rp M y , Cr B A pq M z . Уравнения Эйлера (4) Динамические уравнения Эйлера p, q, r – проекции вектора угловой скорости ω на оси связанной системы координат A, B, C – главные моменты инерции твёрдого тела p sin sin cos , q sin cos sin , Кинематические уравнения Эйлера (5) r cos Ox1y1z1 – неподвижная система координат Oxyz – связанная система координат К – линия узлов Углы Эйлера ψ – угол прецессии θ – угол нутации φ – угол собственного вращения 7 Случай Эйлера M x 0, M y 0, M z 0. В случае Эйлера центр масс твёрдого тела совпадает с неподвижной точкой. Следовательно, момент внешних сил относительно неподвижного центра будет нулевым Ap C B qr 0, Bq A C rp 0, (5) Cr B A pq 0. , , Динамические уравнения в случае Эйлера Первые интегралы K O const (7) KO2 A2 p 2 B 2 q 2 C 2 r 2 const (8) T 1 2 Ap 2 Bq2 Cr 2 const (9) Постоянство кинетического момента Постоянство кинетической энергии Стационарные вращения твёрдого тела - это движение при котором угловое ускорение равно нулю C B qr 0 A C rp 0 B A pq 0 (10) 8 Движение динамически симметричного тела в случае Эйлера. Регулярная прецессия Ap K O sin sin Aq K O sin cos Cr K O cos Проекции кинетического момента (11) Аналитическое решение дифференциальных уравнений движения r r0 const cos Cr0 const K0 p sin 0 sin q sin 0 cos r cos 0 Абсолютная и связанная системы координат. Углы Эйлера K0 2 const A r0 cos 0 r0 r0 (12) (13) (14) Кинематические уравнения Эйлера для данного случая (15) Угловая скорость прецессии KO cos 0 A (16) C AC r0 r0 1 const A A Угловая скорость собственного вращения 9 Уравнения движения тяжёлого твёрдого тела вокруг неподвижной точки и их первые интегралы n (γ1, γ2, γ3) – единичный вектор вертикали OXYZ – неподвижная система координат Oxyz – связанная система координат Твердое тело с неподвижной точкой. Системы координат 1 sin sin , 2 sin cos , 3 cos . (17) Компоненты единичного вектора, выраженные через углы Эйлера ~ dn ωn 0 dt (18) Уравнение Пуассона в векторном виде M O Pn OG (20) Момент силы тяжести в векторном виде a, b, c – координаты центра масс в связанной системе координат d 1 r 2 q 3 , dt d 2 p 3 r 1 , dt d 3 q 1 p 2 . dt M x P 2 c 3b , (19) Уравнение Пуассона в скалярном виде M y P 3 a 1c , (21) M z P 1b 2 a . Момент силы тяжести в скалярном виде 10 Уравнения движения тяжёлого твёрдого тела вокруг неподвижной точки и их первые интегралы dp C B qr P 2 c 3b , dt dq B A C rp P 3 a 1c , dt dr C B A pq P 1b 2 a . dt A (22) Уравнения движения тяжёлого твёрдого тела вокруг неподвижной точки Первые интегралы 12 22 32 1 (23) Длина единичного вектора Ap 1 Bq 2 Cr 3 const (24) Проекция кинетического момента на вертикальную ось 1 Ap 2 Bq2 Cr 2 Pa 1 b 2 c 3 const (25) 2 Закон сохранения полной механической энергии 11 Интегрируемые случаи движения твёрдого тела вокруг неподвижной точки Случай Эйлера a=b=c=0 – центр масс твёрдого тела находится в неподвижной точке O Леонард Эйлер Случай Лагранжа A=B – тело является динамически симметричным a=b=0 – центр масс твёрдого тела находится на оси симметрии r=const – проекция угловой скорости на продольную ось остаётся постоянной Жозеф Луи Лагранж 12 Случай Ковалевской A=B=2C – тело является динамически симметричным, моменты инерции поддаются конкретному соотношению c=0 – центр масс твёрдого тела находится в экваториальной плоскости dp qr 0, dt dq 2 rp 3 , dt dr 2 . dt 2 Ковалевская Софья Васильевна p 2 Pa C q 2 1 2 pq 2 const 2 2 (27) (26) Динамические уравнения Эйлера в случае Ковалевской Первый интеграл движения, получаемый из уравнений (19) и (26) 13 Список рекомендованной литературы по теме «Динамика движения твердого тела, имеющего неподвижную точку» 1. 2. 3. 4. 5. 6. 7. Маркеев А. П. Теоретическая механика: Учеб. пособие для университетов. – М.: Наука. Гл. ред. физ.-мат. лит., 1990. – 416 с. Бухгольц Н. Н. Основной курс теоретической механики в 2 частях. – М.: Наука. Гл. ред. физ.-мат. лит., 1969. Бутенин Н. В., Лунц Я. Л., Меркин Д.Р. Курс теоретической механики. В двух томах. – СПб.: Издательство «Лань», 2007. – 736 с. mechmath.ipmnet.ru/mech/links/ - электронная библиотека Института проблем механики имени А.Ю. Ишлинского РАН. Белецкий В. В. Движение искусственного спутника Земли относительно центра масс. М.: Наука, 1965 – 416 с. Гантмахер Ф. Р. Лекции по аналитической механике. – М.: Наука, 1966. – 300 с. Борисов А.В., Мамаев И.С. Динамика твердого тела. – Ижевск: НИЦ «Регулярная и хаотическая динамика», 2001. – 384 стр. 14