как работает ММ при определении передаточной функции по
реклама

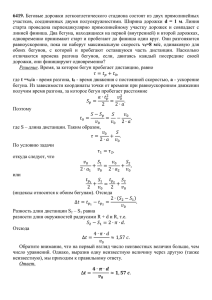
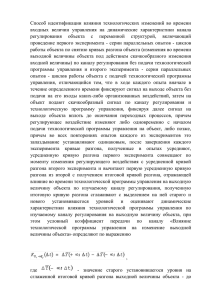
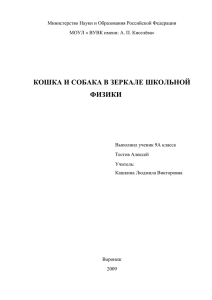
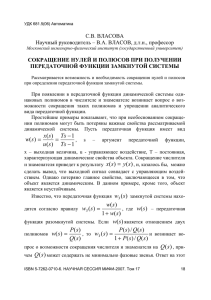
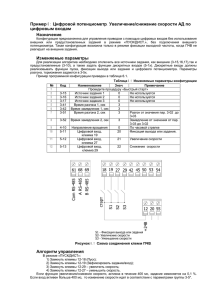
Применение метода масштабирования для определения передаточной функции звена по экспериментальной записи его переходной характеристики (кривой разгона). Эта задача возникает регулярно. Например, для настройки и оптимизации систем управления необходимо знать передаточную функцию управляемого объекта. При этом доступной и надежной информацией об объекте является экспериментальная запись его кривой разгона. Покажем, как эта задача решается с помощью метода масштабирования (ММ). Рассмотрим решение применительно к классу наиболее распространенных линейных объектов, описываемых передаточной функцией общего вида: W ( p) K0 m p (Ti p 1) (1) r i 1 К0 – коэффициент передачи; Ti – постоянные времени; (К0 и Ti – положительные, действительные числа). r, m – положительные целые числа (0; 1; 2; …). r – степень астатизма объекта; (m + r) = n – порядок объекта. Специфика ММ заключается в том, что для его применения необходимо иметь набор (библиотеку) эталонных объектов управления, относящихся к классу (1). Такая библиотека существует и находится на этом сайте в свободном доступе. Ее можно составить самостоятельно, владея математикой в рамках программы технического вуза. Библиотека должна давать возможность строить графики кривых разгона динамических звеньев (объектов) различного порядка «n» и степени астатизма «r» с известными параметрами K0, и Ti. Это значит, в ней должны присутствовать сведения о значениях параметров K0, и Ti каждого включенного в библиотеку объекта, а также табличные данные для построения соответствующей кривой разгона. В более рациональном, компьютерном варианте библиотеки табличные данные заменяются универсальной программой расчета кривой разгона для любого объекта, описываемого формулой (1). В существующую библиотеку включены объекты всех порядков, начиная со второго (идентификация объектов первого порядка не требует специальных методов). Наибольший порядок объектов, включенных в библиотеку, равен 8. Для практики этого оказалось достаточно. Даже с запасом, поскольку, уже начиная с шестого (и даже пятого) порядка, объекты классифицируются как имеющие запаздывание. Степень астатизма «r» объектов, присутствующих в библиотеке, ограничена тремя значениями – 0, 1, 2 (объекты с более высокой степенью астатизма непосильны для ПИД-управления). Достаточное для полноценного применения ММ число эталонных объектов в библиотеке оказалось вполне ограниченным. Условимся в дальнейшем обозначать объект управления (ОУ), для которого нужно определить передаточную функцию, термином «рабочий». Итак, в качестве исходных данных в нашем распоряжении имеется кривая разгона рабочего объекта, полученная экспериментальным путем. Вид кривой разгона позволяет сделать предварительные выводы о рабочем ОУ. Например, степень параболы, которая наиболее точно вписывается в начальный участок кривой разгона, характеризует порядок рабочего ОУ. А по поведению кривой разгона в конце записи (по «хвосту» графика) определяется степень астатизма объекта. (Если с течением времени кривая разгона выходит на установившееся значение, то степень астатизма у объекта нулевая /r=0/. Если кривая изменяется линейно, то это ОУ с астатизмом первой степени /r=1/. Если хвост кривой имеет вид квадратичной параболы, то степень астатизма ОУ вторая /r=2/. Объекты со степенью астатизма r=3 и выше не относятся к классу ПИД-управляемых. Замкнутая система с такими объектами будет неустойчивой при любых параметрах настройки ПИД-регулятора.) Оценив порядок рабочего ОУ и его степень астатизма, выбираем из библиотеки эталонный объект такого же порядка и степени астатизма (однотипный ОУ). Строим на общей координатной плоскости кривые разгона рабочего и эталонного объектов. Если случится невероятное, и кривые совпадут, то это будет означать, что передаточная функция у рабочего ОУ такая же, как у эталонного. Все сведения о ней имеются в библиотеке. Берите, и будьте счастливы. В общем случае кривые не совпадают, и на плоскости видны два разных, но подобных по форме графика. Подобие форм, разумеется, не случайное. Оно объясняется однотипностью рабочего и эталонного объектов. 3 Х 2,5 1 2 2 1,5 1 0,5 t 0 0 20 40 60 80 100 120 140 160 Рис. 1. Графики кривых разгона однотипных объектов управления. 1 – эталонного ОУ, 2 – рабочего ОУ. Наступил момент для выполнения процедуры масштабирования. Ее цель, – сжатием/растяжением кривой разгона рабочего ОУ относительно осей координат, добиться от нее наилучшего совпадения с кривой разгона эталонного объекта. Математически сжатие/растяжение графика x(t) можно представить как перевод его в искусственную систему координат ( x , t ) , связанную с реальными координатами линейными соотношениями: x Mx x (2) t Mt t , (3) где Mx и Mt – масштабные коэффициенты (положительные действительные числа). По рисунку 1 сразу можно сказать, что кривую разгона рабочего объекта (2) следует растянуть по координате «Х» и сжать по оси времени «t». Степень совпадения кривых характеризует точность будущего результата. Поэтому процедуре масштабирования стоит уделить должное внимание. После нескольких приближений, устанавливаем, что достаточно хорошее визуальное совпадение кривых разгона получается при следующих значениях масштабных коэффициентов: Mx = 1,4 (4) Mt = 0,6 (5) Достигнутая степень совпадения демонстрируется на рисунке 2. 3 X 2,5 2 2 1 1,5 1 0,5 t 0 0 20 40 60 80 Рис. 2. Вид совмещенных в результате масштабирования кривых разгона эталонного (1) и рабочего (2) объектов управления. Еще раз подчеркнем, контролируемая визуально степень совпадения кривых разгона рабочего и эталонного объектов управления, является заблаговременной оценкой точности результата, той точности, которую обеспечит ММ полученной передаточной функции рабочего ОУ. Если наблюдаемая степень совпадения вызывает сомнения, то следует выбрать в библиотеке другой, более подходящий эталонный объект. Примечание. Разработанная программа «ММ-аппроксимация» предельно упрощает выполнение процедуры масштабирования. Она сокращает время на достижение наилучшего совмещения кривых разгона до одной минуты, и выдает соответствующие значения коэффициентов Mx и Mt. Обеспечив требуемое совпадение кривых разгона, мы отождествляем рабочий объект управления в искусственных координатах ( x , t ) с реальным эталонным объектом. Передаточная функция последнего нам известна. Значит, в искусственных координатах такой же будет и передаточная функция рабочего ОУ. Решение задачи получено. Но оно нас не устраивает, поскольку для дела нужна передаточная функция рабочего ОУ в реальных координатах (x,t). Значит, необходимо вернуть рабочий объект в реальную систему координат. Займемся этим. В искусственных координатах передаточная функция рабочего ОУ нам известна: W( p) K et0 X( p) m Y( p ) p r (T et p 1) i (6) i 1 А нужно знать: W ( p) X ( p) Y ( p) (7) Соотношение (2) позволяет изменить запись (6) и сделать первый шаг к цели (7): K et0 X ( p ) M x X( p ) W( p ) m Y( p ) Y( p ) p r (Tiet p 1) i 1 Из равенства (8) следует: (8) X( p ) K et0 m Y( p) M p r (T et p 1) i x (9) i 1 Осталось выяснить взаимосвязь между параметрами преобразования Лапласа p и p в случае линейной модификации аргумента (3) у преобразуемой по Лапласу функции. Это позволит заменить p в формуле (9). Примем во внимание свойство преобразования Лапласа: операции дифференцирования функции-оригинала соответствует операция умножения на параметр «p» функцииизображения. p d dt (10) Запись (10) можно развернуть, если учесть принятое соотношение (3): p d d 1 d 1 p dt d(M t t ) M t dt Mt (11) Осталось заменить p в формуле (9): X ( p) W ( p) Y ( p) K et0 M rt m p r m et p Tiet r M x r (Ti 1) M x p ( p 1) M t i1 Mt i 1 M i K et0 (12) Результат (12) приводится к виду передаточной функции (1), если выполняются равенства: M rt K0 K Mx et 0 (13) et T Ti i Mt (14) Соотношения (13) и (14) это именно те формулы, по которым известные параметры передаточной функции эталонного объекта пересчитываются в параметры искомой передаточной функции рабочего объекта управления. Получено окончательное решение задачи. Передаточная функция рабочего ОУ в реальных координатах определена полностью. У рабочего объекта такой же порядок и степень астатизма, как у эталонного. Параметры K0 и Ti рассчитываются по формулам (13) и (14). Достоверность полученной передаточной функции уже известна. Она характеризуется точностью совпадения кривых разгона, достигнутой при выполнении процедуры масштабирования. Упомянутая выше программа «ММ-аппроксимация» содержит встроенную библиотеку эталонных объектов (допускающую пополнение). Программа обеспечивает максимальное удобство и оперативность выполнения процедуры масштабирования. Рассчитывает и выдает пользователю полные сведения о параметрах искомой передаточной функции. Программа доступна для приобретения. Чтобы лучше оценить действительные возможности ММ, рекомендуется ознакомиться с примером практического применения метода.