1.5. Фундаментальный S
реклама

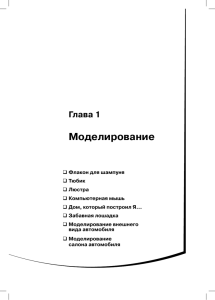
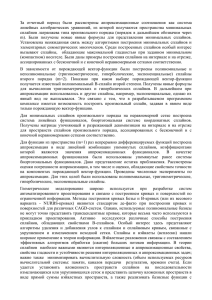
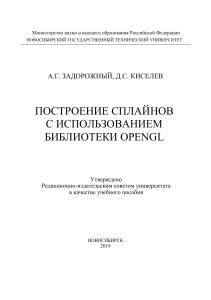
КОМПЬЮТЕРНЫЕ ИССЛЕДОВАНИЯ И МОДЕЛИРОВАНИЕ 2009 Т. 1 № 2 С. 161−171 МАТЕМАТИЧЕСКИЕ ОСНОВЫ И ЧИСЛЕННЫЕ МЕТОДЫ МОДЕЛИРОВАНИЯ Решение краевых задач с помощью S-сплайна Д. А. Силаев1,a, Д. О. Коротаев2 1 Московский государственный университет им. М. В. Ломоносова, механико-математический факультет, 119991, ГСП-1, г. Москва, Ленинские горы, МГУ, Главное здание 2 Институт автоматизации проектирования РАН, 123056, г. Москва, 2-я Брестская ул., д. 19/18 E-mail: a [email protected] Получено 25 сентября 2008 г. Данная работа посвящена применению теории S-сплайнов для решения уравнений в частных производных на примере уравнения Пуассона. S-сплайн — кусочно-полиномиальная функция, коэффициенты полиномов которой определяются из двух условий: первая часть коэффициентов определяется условиями гладкой склейки, остальные определяются методом наименьших квадратов. В зависимости от порядка рассматриваемых полиномов и соотношения между количеством условий первого и второго типов мы получаем S-сплайны с разными свойствами. На настоящий момент изучены сплайны 3-й степени класса C 1 и сплайны 5-й степени класса C 2 (т. е. на них накладывались условия гладкой склейки вплоть до первой и второй производных соответственно). Мы рассмотрим, каким образом могут быть применены сплайны 3-й степени класса C 1 при решении уравнения Пуассона на круге и в других областях. Ключевые слова: теория S-сплайнов, уравнение Пуассона, решение дифференциальных уравнений Solving of boundary tasks by using S-spline D. A. Silaev1, D. O. Korotaev2 1 Moscow State University, Faculty of Mechanics and Mathematics, MSU, Glavnoe Zdanie, GSP-1, Leninskiye Gory, Moscow, 119991, Russia 2 Institute for Computer Aided Design, 2nd Brestskaya str. 19/18, Moscow, 123056, Russia Abstract. — This article is dedicated to use of S-spline theory for solving equations in partial derivatives. For example, we consider solution of the Poisson equation. S-spline — is a piecewise-polynomial function. Its coefficients are defined by two states. The first part of coefficients are defined by smoothness of the spline. The second coefficients are determined by least-squares method. According to order of considered polynomial and number of conditions of first and second type we get S-splines with different properties. At this moment we have investigated order 3 S-splines of class C1 and order 5 S-splines of class C 2 (they meet conditions of smoothness of order 1 and 2 respectively). We will consider how the order 3 S-splines of class C1 can be applied for solving equation of Poisson on circle and other areas. Key words: S-spline theory, Poisson equation, differential equations solving Citation: Computer Research and Modeling, 2009, vol. 1, no. 2, pp. 161–171 (Russian). © 2009 Д. А. Силаев, Д. О. Коротаев Д. А. Силаев, Д. О. Коротаев 162 1. Одномерный S-сплайн 1.1. Определение одномерного S-сплайна Рассмотрим на отрезке [a b] равномерную сетку {xk }kk 0K , xk a kh, h — шаг сетки. Рассмотрим на [a b] еще одну равномерную сетку {l }ll 0L , l a lH , H mh m Z Пусть y ( y0 y1 … yK ) R K 1 и y0 R. Обозначим n j 2 P n u u ( x) a0 a1 x a j x j множество полиномов степени n с фиксированными коэффициентами a0 a1. Рассмотрим функM ционал: l (u ) (u (l kh) yml k ) 2 . k 0 n В классе P ищется такой полином, который минимизирует l и удовлетворяет следующим начальным условиям: (1.1) a00 y0 a10 y0 и условиям гладкой склейки двух последовательных полиномов a0l gl 1 (l l 1 ) gl 1 ( H ) a1l g l 1( H ) (1.2) Определение 1. S-сплайном назовем функцию Smn M ( x), которая совпадает с полиномом g l ( x) на отрезке l x l 1 . Определение 2. Периодическим S-сплайном называется S-сплайн, являющийся периодической функцией на отрезке [a b]. Предположение периодичности означает замену начальных условий (1.1) на следующие условия периодичности: a00 g L 1 ( H ) a10 g L 1( H ). (1.3) Здесь L — число полиномов, составляющих сплайн. 1.2. Построение системы линейных уравнений Условия минимизации функционала l (u ) дадут нам следующие уравнения: S2 a0l S3 a1l h S4 a2l h 2 S5 a3l h3 P1l , S3a0l S4a1l h S5a2l h2 S6a3l h3 P2l , (1.4) где M M k 0 k 0 S j k j Pjl yml k k j 1 (1.5) Произведем замену переменных ai ai hi i 01 2 3 При этом уравнения (1.2) и (1.4) преобразуются в следующие: a l01 ma1l 1 m2 a l21 m3 a 3l 1 a l0, 2 l 1 l 1 l 1 l a1 2ma 2 3m a 3 a1, S2 a l0 S3 a1l S4 a l2 S5 a l3 P1l , S3 a l0 S4 a1l S5 a l2 S6 a 3l P2l , (1.6) (1.7) ____________________ КОМПЬЮТЕРНЫЕ ИССЛЕДОВАНИЯ И МОДЕЛИРОВАНИЕ ____________________ Решение краевых задач с помощью S-сплайна 163 Обозначим матрицы: A1 S2 S3 S3 S A2 4 S4 S5 S5 1 m m2 m3 B1 B2 S6 0 1 2m 3m2 Кроме того, пусть l l P a a и X 2l 0 X 2l 1 2 где l 01… L 1 l al P a 1 3 l 1 l 2 Pl Тогда систему уравнений для определения коэффициентов периодического сплайна можно записать в виде E A1 B1 0 0 0 A2 B2 0 0 0 0 E A1 B1 0 0 0 A2 B2 … B1 … 0 … 0 … 0 … 0 B2 0 0 0 0 0 0 0 0 … A1 A 2 2 L 1 X0 X1 X2 X3 X4 X 0 P 0 0 P1 . 0 P (1.8) L 1 1 0 . 0 1 Для непериодического сплайна первые две строки заменяются на стартовые условия (1.1). Введем обозначение1: Размерность этой системы — 4L x 4 L. Здесь E, как обычно, единичная матрица: E 1 U 1 2 1 m T35 m3T34 A A m m2 2 T35 3 T34 A A 1 1 m m2T45 m3T34 A A m m2 12 T45 3 T44 A A (1.9) где A det( A2 ) det S4 S5 S5 S4 S6 S52 0 S6 Tij Si S j Si 1S j 1. (1.10) (1.11) Если сделать некоторые преобразования, то система (1.8) распадается на систему размерности 2L x 2 L : E U 0 0 0 E U 0 0 E 0 0 X 0 B2 A21 P L 1 1P0 2 B A X 2 2 1 1 4 X B2 A2 P , 1 L 2 2 L2 B A P E X 2 2 U 0 0 (1.12) 1 Матрицу U назовем матрицей устойчивости, поскольку, как мы увидим далее, она определяет устойчивость сплайна. _____________________________________ 2009, Т. 1, № 2, С. 161–171 ______________________________________ Д. А. Силаев, Д. О. Коротаев 164 из которой находятся первый и второй коэффициенты полиномов. Остальные два коэффициента определяются из метода наименьших квадратов (1.4). Заметим, что матрица U, определенная нами выше, может быть также записана в виде U B1 B2 A21 A1. 1.3. Существование и единственность S-сплайнов Теорема 1. При любых начальных условиях и для любых констант m и M существует и единственен непериодический сплайн Sm M [ y]( x). Теорема 2. Пусть числа m и M таковы, что собственные числа матpицы U не равны корню степени L из единицы. Тогда существует и единственен периодический сплайн Sm M [ y]( x). 1.4. Сходимость S-сплайнов Теорема 3. Пусть f ( x) C4 [a b] — периодическая функция и пусть выполнены предположения f ( xk ) fk Ch4 (1.13) где константа C не зависит от h. Пусть, кроме того, собственные числа матрицы U (1.9) по модулю меньше единицы. Тогда периодический сплайн Sm M ( x) с узлами на равномерной сетке l a lH имеет дефект два (т. е. Sm3 M ( x) C1[a b] ), и для x [a b] справедливы следующие оценки: f ( p ) ( x) Sm( p M) ( x) C p h4 p p 01 2 3. (1.14) Теорема 4. Пусть f ( x) C4 [a b] и пусть выполнены предположения f ( xk ) f k Ch4 f (0) f 0 Ch3 (1.15) где константа C не зависит от h. Пусть, кроме того, собственные числа матрицы U (1.9) по модулю меньше единицы. Тогда непериодический сплайн Sm M ( x) c узлами на равномерной сетке l a lH имеет дефект два (т. е. Sm3 M ( x) C1[a b] ), и для x [a b] справедливы следующие оценки: f ( p ) ( x) Sm( p M) ( x) C p h4 p p 01 2 3. (1.16) Замечание. Как показано в работе [1], выполнение условия m M * , где * 0,93, обеспечивает устойчивость, собственные числа матрицы U оказываются по модулю меньше единицы. 1.5. Фундаментальный S-сплайн Фундаментальный S-сплайн B j ( x) — это периодический или непериодический S-сплайн, построенный по данным y ( y0 y1 … yK ) R K 1 и y0 R вида: { y i ij, i 0,..., K }. Легко видеть, что линейная комбинация K y B ( x) S ( x) j 0 j j является S-сплайном, приближающим началь- ные данные yi i 0… K . ____________________ КОМПЬЮТЕРНЫЕ ИССЛЕДОВАНИЯ И МОДЕЛИРОВАНИЕ ____________________ Решение краевых задач с помощью S-сплайна 165 Приведем графики фундаментальных S-сплайнов для периодического случая (см. рис. 1). Рис. 1 2. S-сплайн на круге 2.1. Построение r -сплайна Будем рассматривать на единичном круге полярные сетки: {i ih1 i 01… K1} { k kH1 k 0… L1} H1 m1h1 K1 m1 L1 K1h1 2 , {rj jh2 j 01… K 2 } {Rl lH 2 l 0… L2 } H 2 m2 h2 K 2 m2 L2 K 2 h2 1 Будем строить аппроксимацию функции f ( r ) на круге при условии, что функция f имеет 4 производных по переменным r и , т. е. f C 4 [01] [0 2 ]. (2.1) Пусть { yij f (i rj ) i 0… K1 j 0… K 2 } — значения в узлах сетки, по которым будет проводиться аппроксимация. При каждом j 1… K 2 построим периодический S-сплайн S j ( ) на отрезке [0 2 ] по начальным данным { yij i 0… K1}. Каждый из этих сплайнов аппроксимирует функцию f ( rj ) на окружности с радиусом r j , причем в силу теоремы о сходимости S (j p ) ( ) p f ( rj ) p Ch14 p [0 2 ] p 01 2 3 Далее, фиксируем произвольное [0 2 ]. Рассмотрим набор {z j S j ( ) j 1… K 2 z0 y00 }. Также обозначим z0 — значение, получаемое по некоторому алгоритму по набору {z j }, которое приближает f r ( r ) r 0 с порядком не ниже третьего. Например, z 0 1 h2 3 1 3( z1 z0 ) 2 ( z2 z0 ) 3 ( z3 z0 ) (2.2) — приближение производной с третьим порядком аппроксимации. По набору {z j } и z0 строим S (r ) — непериодический S-сплайн на отрезке [01]. Будем считать, что m2 M 2 (здесь 0,93096). Это гарантирует, что собственные значения матрицы U _____________________________________ 2009, Т. 1, № 2, С. 161–171 ______________________________________ Д. А. Силаев, Д. О. Коротаев 166 по модулю не будут превосходить единицы. Тогда, построенный для сплайн S (r ) будет аппроксимировать функцию f ( r ) при r [01]. Определение 3. Назовем r -сплайном функцию S ( r ) , значение которой при любых r и определяется по следующему алгоритму: по набору {z j S j ( ) j 1… K 2 z0 y00 }, z0 строим S (r ), затем полагаем S ( r ) S (r ). По-другому S ( r ) S (r ) {z j S j ( ) j 1… K 2 z0 y00 }. Очевидно, что этот сплайн можно дифференцировать по r 3 раза в любой точке, не принадлежащей сетке, т. е. при r R j . При r R j определим производную следующим образом: p p S ( r ) p S ( r 0) p r r p 01 2 3 Определение 4. Назовем p-й производной по от r -сплайна ( p 1 2 3) функцию p p S ( r ) на единичном круге, которая равна r -сплайну, построенному по набору dp z S j ( ) j 1… K 2 z0 0 j p d p 1 2 3 (2.3) Как и в случае с производной по r , под производной по в точках k понимается значение в точке k 0. 2.2. Получение S-сплайна на круге как явной функции двух переменных Будем обозначать фундаментальные сплайны по как Ci ( ), а фундаментальные сплайны по аргументу r как D j (r ). S ( r ) S (r ) {z j S j ( ) j 1… K 2 z0 y00 } S (r ) K2 K2 K1 1 K1 1 K 2 j 0 j 0 i 0 i 0 j 0 z j D j (r ) D j (r ) yij Ci ( ) yij Ci ( ) D j (r ). (2.4) Предпоследнее равенство следует из определения набора {z j S j ( )} и разложения по фунK1 1 даментальным сплайнам S j ( ) yij Ci ( ). График фундаментального сплайна представлен i 0 на рис. 2. Рис. 2 ____________________ КОМПЬЮТЕРНЫЕ ИССЛЕДОВАНИЯ И МОДЕЛИРОВАНИЕ ____________________ Решение краевых задач с помощью S-сплайна 167 Теперь рассмотрим укрупненную сетку круга { k kH1 k 0… L1} где H1 m1h1 , и {Rl lH 2 l 0… L2 } где H 2 m2 h2 . Рассмотрим вид S-сплайна в некотором произвольном секторе этой сетки: kH1 r lH 2 r где H1 и r H 2 . (2.5) В этом секторе фундаментальные BS-сплайны согласно определению S-сплайна представляются в виде полиномов третьей степени: 3 3 p 0 q 0 Ci ( ) cipk p D j (r ) cqlj r q. Подставляя эти выражения в формулу для S ( r ) и меняя порядок суммирования, получим K1 1 K 2 3 3 p 0 q 0 S ( r ) yij cipk p d qlj r q i 0 j 0 3 3 K1 1 K 2 i 0 j 0 3 3 p r q yij cipk d qlj a klpq p r q. p 0 q 0 (2.6) p 0 q 0 Представление сплайна на круге в виде разложения по одномерным фундаментальным сплайнам (2.4) позволяет определить понятие смешанной производной для двумерного сплайна. pq Определение 4. Под смешанной производной двумерного сплайна S (r , ) 0 p p r q K1 1 K 2 dp dq C ( ) D j (r ), состоящая из форq 3, понимается следующая конечная сумма yij i d p dr q i 0 j 0 мальных производных от соответствующих фундаментальных сплайнов по r и . 2.3. Сходимость двумерного сплайна Обозначим h max(h1 h2 ). Теорема 5. Пусть m1 M 1 , m2 M 2 и выполнены условия f C 4 [01] [0 2 ]. (2.7) Тогда для сплайна S ( r ) справедливы оценки pq pq S ( r ) f ( r ) C pq h4 p q где 0 p q 3. p r q p r q Доказательство следует из построения двумерного сплайна, представления его в виде линейной комбинации фундаментальных одномерных сплайнов, а также из сходимости одномерных сплайнов. 2.4. Решение краевых задач с помощью сплайнов Рассмотрим уравнение Пуассона c некоторыми граничными условиями 1 u 1 2u p(r , ), (r , ) D, r 2 2 r r r r u (r , ) D f (r , ). (2.8) Пусть D — некоторая область, лежащая внутри единичного круга. _____________________________________ 2009, Т. 1, № 2, С. 161–171 ______________________________________ Д. А. Силаев, Д. О. Коротаев 168 Предлагаемый метод решения состоит из следующих шагов: 1) представление предполагаемого решения уравнения в виде линейной комбинации фундаментальных сплайнов; 2) применение метода Галеркина к уравнению в пространстве фундаментальных сплайнов; 3) подстановка граничных условий. Рассмотрим последовательно эти шаги. Представим решение уравнения в виде K1 1 K 2 S ( r ) uij Ci ( ) D j (r ), (2.9) i 0 j 1 где Ci ( ) и D j (r ) — соответствующие фундаментальные одномерные сплайны. Домножим исходное уравнение на r . Теперь будем домножать уравнение скалярно на Cl ( ) Dk (r ), где пары индексов l , k пробегают все значения l 0, , K1 1, k 1, , K 2 , но такие, что (h2 k , h1l ) D (т. е. только для внутренних узлов области D). В нашем случае в качестве скалярного произведения возьмем интеграл по области D. Получим уравнение 2u u 1 2u 2 D r r 2 r r 2 Cl ( ) Dk (r )rdrd D p(r, )Cl ( ) Dk (r )r drd. (2.10) Заметим, что под интегралом вошел также якобиан r от преобразования в полярные координаты. Рассмотрим процесс интегрирования на примере круга. В случае других областей можно действовать подобным образом. Область интегрирования разбиваем на сектора вида r [ Rq , Rq 1 ], [ p , p 1 ], где Rq qH 2 , q 0,..., L2 , p pH1 , p 0,..., L1. После этого мы можем разбить двойной интеграл на одномерные. Преобразуем левую часть следующим образом: L1 1 L2 1 Rq1 p1 2u u 1 2u 2u u 1 2u r C ( ) D ( r ) rdrd r C ( ) Dk (r )rdrd . 2 2 l D r 2 r r 2 l k r r r p 0 q 0 Rq p Теперь подставим разложение (2.9) и проинтегрируем по частям: Rq1 p1 2 uij r D j (r ) Dk (r ) rD j (r ) Dk (r )dr Ci ( )Cl ( )d i , j p ,q p Rq p1 Rq1 D j (r ) Dk (r )dr p Rq 2rD j (r ) Dk (r )dr Rq1 Rq1 2 Ci( )Cl ( )d uij r D j (r ) Dk (r ) rDj (r ) Dk (r ) Rq i , j p ,q Rq p 1 Rq 1 Ci ( )Cl ( )d p Rq p 1 p 1 D j (r ) Dk (r )dr Ci ( )Cl ( ) Ci ( )Cl ( ) d p p 1 2 uij Cl ( )Ci ( )d Dk (1) D j (1) rDk (r ) D j (r ) 2rDk (r ) D j (r )dr i, j 0 0 2 Cl ( )Ci ( )d Dk (r ) D j (r )dr p(r , )Cl ( ) Dk (r )r 2 drd. 0 0 D 1 (2.11) ____________________ КОМПЬЮТЕРНЫЕ ИССЛЕДОВАНИЯ И МОДЕЛИРОВАНИЕ ____________________ Решение краевых задач с помощью S-сплайна 169 Последнее уравнение ввиду произвольности выбора l и k представляет собой систему для определения коэффициентов uij . Чтобы сделать ее полной, нам необходимо учесть граничные условия, которые дадут нам недостающее число уравнений u C ij i ( ) D j (r ) i, j f ( , r ). D Для круга радиуса единица они будут иметь вид u C ( )D (1) f ( ), ij i l j l 0, , K1 1. (2.12) i, j В общем же случае нам необходимо поставить граничные условия в точках пересечения сетки с границей области D, но столько, сколько нам недостает уравнений (с учетом того количества уравнений, которое получилось для полностью внутренних точек области). Встает закономерный вопрос о том, каким образом выбирать пары индексов (i, j ), которые определяют фундаментальные сплайны, участвующие в разложении предполагаемого решения, для произвольной области внутри единичного круга. Во-первых, мы берем индексы, соответствующие всем внутренним узлам сетки, как мы это делали при домножении уравнения на фундаментальные сплайны. Во-вторых, мы берем все точки, лежащие на границе или ближайшие к ним узлы, если двигаться по лучам сетки по направлению от границы. Из системы уравнений (2.11) и (2.12) мы получаем коэффициенты uij в разложении решения по фундаментальным сплайнам, т. е. искомое приближенное решение. Теорема 6. Пусть u (r , ) — точное решение уравнения (2.8), а S (r , ) — приближенное решение, полученное в результате вышеописанного метода. Пусть, кроме того, собственные значения матрицы U, построенной для сплайнов по r и по , по модулю меньше единицы. Тогда верна оценка u (r , ) S (r , ) Ch 4 , где h max(h1 , h2 ). K1 1 K 2 Доказательство. Аппроксимируем точное решение u сплайном S (r , ) vij Ci ( ) D j (r ). i 0 j 1 Пусть u C . Обозначим y u S . Тогда, применив теорему 5, получим, что y ( n ) (r , ) C1h4 n , 4 где n 0,1,2,3. Так как u — точное решение уравнения (2.8), то будет выполнено интегральное тождество 2 2 uCl ( ) Dk (r )r drd p(r , )Cl ( )Dk (r )r drd. D D Разобьем область интегрирования на сектора, как мы это делали в методе Галеркина. Тогда мы сможем почленно дифференцировать u y S два раза: Rq1 p1 2 1 2 ( y S ) Cl ( ) Dk (r )r 2 drd r 2 p(r , )Cl ( ) Dk (r )drd. 2 2 r r p 0 q 0 Rq p r D L1 1 L2 1 Теперь перенесем члены с y в правую часть, а оставшиеся проинтегрируем по частям, как мы это делали в методе Галеркина: 2 1 (1) rD (r ) D (r ) 2rD (r ) D (r )dr v C ( ) C ( ) d D (1) D k ij l i j k j 0 k j i, j 0 2 1 Cl (r )Ci ( )d Dk (r ) D j (r )dr 0 0 _____________________________________ 2009, Т. 1, № 2, С. 161–171 ______________________________________ Д. А. Силаев, Д. О. Коротаев 170 p(r , )Cl ( ) Dk (r )r drd 2 Rq 1 p 1 y (r , )Cl ( ) Dk (r )drd. p p , q Rq D Как мы видим, полученная система уравнений совпадает с системой (2.11) с точностью до членов с y. Матрицу этой систему обозначим A alkij . Введем обозначение z S (r , ) S (r , ) (uij vij )Ci ( ) D j (r ). Вычтем из полученной системы систему (2.11), тогда получим систему i, j a ij lk (uij vij ) ylk , или Az y. i, j Rq 1 p 1 Здесь z zij zij uij vij , а y ylk ylk y (r , )Cl ( ) Dk (r )drd . p , q Rq p Rq1 p1 p , q Rq p y (r , )Cl ( ) Dk (r )drd p ,q Rq1 p1 Rq y (r , )Cl ( ) Dk (r )drd p Rq 1 p 1 sup y p , q Rq Обозначим c p ,l sup [ p , p 1 ] Cl ( ) Dk (r )r 2 drd . p Cl ( ) , d q ,k sup r[ Rq , Rq 1 ] Dk (r )r 2 . Тогда в силу теоремы 5, примененной к y и ее производным, получим Rq 1 p 1 sup y p , q Rq p Cl ( ) Dk (r )r 2 drd Ch 2 c p ,l d q ,k H1 H 2 p ,q Cm1m2 h 4 c p ,l d q ,k Cm1m2 h 4 c p ,l d q ,k . p,q p q Теперь покажем, что получившиеся суммы ограничены суммой сходящейся геометрической прогрессии. Для этого нам потребуется лемма 3 для периодического и непериодического случаев, доказательство которых приведено в [1] и [2]. Из этих лемм, в частности, следует, что отклонение приближения фундаментальными сплайнами от начальных данных удовлетворяет соотношению zn Cl (nH1 ) l ,m1n nt zt , где l , m1n — символы Кронекера, max( 1 , 2 ), 1 , 2 — собственные значения матрицы U (1.9). Аналогичные соотношения имеют место и для фундаментальных сплайнов по r . Тогда элементы сумм, стоящих в скобках, ограничены по модулю членами сходящейся геометрической прогрессии, следовательно, их сумма ограничена суммой бесконечной сходящейся прогрессии, причем эта сумма не зависит от шагов h1 и h2 , что и требовалось доказать. В силу единственности S-сплайнов фундаментальные сплайны будут линейно независимыми, а, следовательно, матрица системы A является обратимой, значит: z A1 y и z A1 y zij A1 max ylk C2 h4 l ,k S (r , ) S (r , ) C2 h 4 (следует из теоремы 5). u(r , ) S (r , ) u(r , ) S (r , ) S (r , ) S (r , ) C1h 4 C2 h 4 Ch 4 . Теорема доказана. ■ ____________________ КОМПЬЮТЕРНЫЕ ИССЛЕДОВАНИЯ И МОДЕЛИРОВАНИЕ ____________________ Решение краевых задач с помощью S-сплайна 171 2.5. Результаты численных расчетов Методом, описанным выше, решалась задача: 1 u 1 2u 2, r (0,1), (0, 2 ), r 2 2 r r r r u (r , ) r 1 sin 2 ( ). Ниже представлена таблица точности, полученной при разном количестве точек на отрезке путем сравнения с точным аналитическим решением. В соответствии с теоремой, коэффициент увеличения точности при уменьшении шага в 1,5 раза должен составлять 1,54 5,0625. Таблица 1 Кол-во полиномов по r или по Точность 2 1,99746 102 4 8, 608 103 3 6 1,79110 9 5, 46 104 14 21 1,0110 4 2,14 10 5 Коэффициент увеличения точности 2,32 4,804 3,28 5,45 4,66 Рис. 3 Список литературы 1. Силаев Д. А., Якушина Г. И. Приближение S-сплайнами гладких функций // В кн.: Труды семинара имени И. Г. Петровского. Вып. 10. М.: Изд-во МГУ, 1984. С. 197. 2. Амилющенко А. В., Лукьянов А. И., Силаев Д. А. Применение сплайна для приближения гладких периодических функций // Вестник московского университета. N 6, 1996 г. Материалы международной конференции и Чебышевских чтений, посвященные 175-летию Чебышева. Т. 1. С. 22–25. _____________________________________ 2009, Т. 1, № 2, С. 161–171 ______________________________________