Пояснительная записка к курсовому проекту "Расчет следящей системы реверсивного электропривода главного движения карусельного станка"
реклама

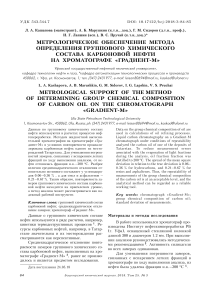
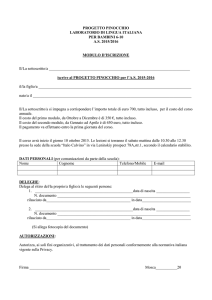
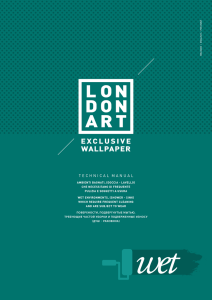
Министерство образования и науки Российской Федерации Федеральное агентство по образованию Государственное образовательное учреждение высшего профессионального образования «Комсомольский - на - Амуре государственный технический университет» Кафедра: «Электропривод и автоматизация промышленных технологий» Пояснительная записка к курсовому проекту «Расчет следящей системы реверсивного электропривода главного движения карусельного станка» Студент группы 3ЭП-1В: Калинкин А.В. Преподаватель: Горячев В.Ф. Ванино 2008 Ðàñ÷åò ïàðàìåòðîâ ñèñòåìû ðåãóëèðîâàíèÿ, íàñòðîéêà ðåãóëÿòîðîâ Ðèñóíîê 1. Óïðîùåííàÿ ñòðóêòóðíàÿ ñõåìà ñèñòåìû ïîä÷èí¸ííîãî ðåãóëèðîâàíèÿ ñêîðîñòè Ñòðóêòóðíàÿ ñõåìà ýëåêòðîïðèâîäà ñîñòàâëÿåòñÿ äëÿ ëèíåéíîãî ïðèáëèæåíèÿ ñèñòåìû, ò.å. ïðåäïîëàãàåòñÿ, ÷òî ñèñòåìà èìååò æåñòêóþ êèíåìàòè÷åñêóþ ïåðåäà÷ó áåç ëþôòîâ è çàçîðîâ, íå äîñòèãàþòñÿ ïðåäåëû îãðàíè÷åíèÿ òîêà è ñêîðîñòè, îòñóòñòâóþò â ñèñòåìå è äðóãèå íåëèíåéíîñòè. Òàêèå ïðåäïîëîæåíèÿ ìîæíî äîïóñòèòü ïðè ìåäëåííî ìåíÿþùèõñÿ âõîäíûõ âîçäåéñòâèÿõ è âûñîêèõ ñêîðîñòÿõ ïðèâîäà. Ïðè ðàñ÷åòå ñèñòåìû ïðèìåì ìàêñèìàëüíîå çíà÷åíèå ñèãíàëà â ñèñòåìå ðàâíûì Umax 10  Ðàñ÷åò ïîñòîÿííûõ âðåìåíè ñèñòåìû Àêòèâíîå ñîïðîòèâëåíèå ÿêîðíîé öåïè: Rÿö 1.2 Rÿ 2Rò 2Rà Rù Ñîïðîòèâëåíèå ÿêîðÿ äâèãàòåëÿ ìîæíî íàéòè ïî ñëåäóþùåé ôîðìóëå: Rÿ 0.5 1 Rÿ 0.5 Uí U í I í Ií Pí 1 164000 220 220 931.82 931.82 0.024 Îì Ñîïðîòèâëåíèå, îáóñëîâëåííîå ïåðåêðûòèåì àíîäíûõ òîêîâ: p 6 Rà - ïóëüñíîñòü ïðåîáðàçîâàòåëÿ xð p Ñîïðîòèâëåíèå ùåòî÷íîãî êîíòàêòà, ñ ó÷åòîì ïàäåíèÿ íàïðÿæåíèÿ íà íåì U 0.063 2 B 6 Rà 0.12 Îì 3.14 Ñîïðîòèâëåíèå ùåòî÷íîãî êîíòàêòà, ñ ó÷åòîì ïàäåíèÿ íàïðÿæåíèÿ íà íåì U 2 B Изм. Лист № докум. Подпись Дата Лист xð p Rà 0.063 6 0.12 3.14 Ñîïðîòèâëåíèå ùåòî÷íîãî êîíòàêòà, ñ ó÷åòîì ïàäåíèÿ íàïðÿæåíèÿ íà íåì U 2 B U Ií Rù 2 Îì 0.002 931.82 Ýêâèâàëåíòíîå ñîïðîòèâëåíèå ÿêîðíîé öåïè: Rÿö 1.2 Rÿ 2Rò 2Rà Rù Rÿö 1.2 0.024 2 0.027 2 0.12 0.002 0.324 Îì Ïîñòîÿííàÿ âðåìåíè ÿêîðíîé öåïè (ýëåêòðîìàãíèòíàÿ ïîñòîÿííàÿ): Tý Lÿö 0.0018 Rÿö 0.324 c 0.0056 Êîíñòðóêòèâíàÿ ïîñòîÿííàÿ äâèãàòåëÿ: c Uí 1.2 Rÿ Ií 220 1.2 0.024 931.82 157.08 í Ýëåêòðîìåõàíè÷åñêàÿ ïîñòîÿííàÿ âðåìåíè: J Rÿö Tì c 0.4 0.31 2 1.2322 0.214 1.232  ñ c Çà ìàëóþ ïîñòîÿííóþ âðåìåíè ñèñòåìû ïðèíèìàåòñÿ ïîñòîÿííàÿ âðåìåíè òèðèñòîðíîãî ïðåîáðàçîâàòåëÿ ðàâíàÿ: T T òï c 0.005 Ðàñ÷åò ïàðàìåòðîâ íåèçìåííîé ÷àñòè ñèñòåìû Êîýôôèöèåíò ïåðåäà÷è òèðèñòîðíîãî ïðåîáðàçîâàòåëÿ îïðåäåëÿåòñÿ ñîâìåòíî ñî ñõåìîé óïðàâëåíèÿ: Kòï Ud0 513.18 Uómax 10 51.318 Îáðàòíàÿ ñâÿçü ïî òîêó: Äàò÷èê òîêà ñîñòîèò èç èçìåðèòåëüíîãî øóíòà è óñèëèòåëÿ ÄÓ. Êîýôôèöèåíò ïåðåäà÷è øóíòà: Uøí 0.075 Kø 0.00003 2500 Iøí Лист Изм. Лист № докум. Подпись Дата Êîýôôèöèåíò ïåðåäà÷è óñèëèòåëÿ: Käó Uîòmax 10 Kø 2.5Ií 0.00003 2.5 931.82 143.089 Êîýôôèöèåíò îáðàòíîé ñâÿçè ïî òîêó: Kø Käó Kîò 0.00003 143.089 0.0043 Îáðàòíàÿ ñâÿçü ïî ñêîðîñòè: Êîýôôèöèåíò ïåðåäà÷è òàõîãåíåðàòîðà ïî ñïðàâî÷íûì äàííûì: Kòã 1.91 Êîýôôèöèåíò ïåðåäà÷è äåëèòåëÿ íàïðÿæåíèÿ: Uîñmax 10 Käåë 0.033 1.91 157.08 K òã í Êîýôôèöèåíò îáðàòíîé ñâÿçè ïî ñêîðîñòè: Kòã Käåë Kîñ 1.91 0.033 0.064 Íàñòðîéêà êîíòóðà òîêà Ïðè ðàñ÷åòå è ïðîåêòèðîâàíèè ñèñòåìû ïîä÷èíåííîãî ðåãóëèðîâàíèÿ îñíîâíûì äîïóùåíèåì ÿâëÿåòñÿ ïðåíåáðåæåíèå âíóòðåííåé îáðàòíîé ñâÿçüþ ïî ÝÄÑ äâèãàòåëÿ, êîòîðàÿ ïðè îïðåäåëåííîì ñîîòíîøåíèè ïîñòîÿííûõ âðåìåíè ñèñòåìû ìîæåò ñóùåñòâåííî ïîâëèÿòü íà õàðàêòåð ïðîöåññîâ â ñèñòåìå. Íà îñíîâàíèè èññëåäîâàíèé áûëà íàéäåíà ýìïèðè÷åñêàÿ ôîðìóëà îïðåäåëÿþùàÿ îáëàñòü çíà÷åíèé ïîñòîÿííûõ âðåìåíè , â êîòîðîé âëèÿíèå âíóòðåííåé îáðàòíîé ñâÿçè ïî ÝÄÑ äâèãàòåëÿ íåçíà÷èòåëüíî: Tì Tý 5 /9/, 5 T Äëÿ ðàñ÷èòûâàåìîé ñèñòåìû èìååì: Tý 0.0056 Tì 0.179 0.215 5 5 T 5 5 0.005 0.025 Ò.ê. 0.215 0.025 , òî âíóòðåííåé îáðàòíîé ñâàÿçüþ ïî ÝÄÑ äâèãàòåëÿ ïðåíåáðåãàåì. Ïåðåäàòî÷íàÿ ôóíêöèÿ ðàçîìêíóòîãî êîíòóðà òîêà: Wò( p) Wðò( p) Wíò ( p) Лист Изм. Лист № докум. Подпись Дата Wðò( p) Wíò ( p) Wò( p) ãäå ïåðåäàòî÷íàÿ ôóíêöèÿ íåèçìåííîé ÷àñòè êîíòóðà òîêà: Wíò ( p) Kòï 1 T p 1 Rÿö T ý p 1 Kîò Êîíòóð òîêà íàñòðàèâàåòñÿ íà ìîäóëüíûé îïòèìóì. Äëÿ íàñòðîéêè êîíòóðà ñ òàêèì îáúåêòîì íåîáõîäèìî ïðèìåíèòü ÏÈ-ðåãóëÿòîð: Wðò( p) ðò ðò p 1 ðò p Êîýôôèöèåíòû ðåãóëÿòîðà äëÿ ïîëó÷åííîé ñèñòåìû íàõîäÿòñÿ ïî ñëåäóþùèì ôîðìóëàì: êîýôôèöèåíò óñèëåíèÿ ÏÈ-ðåãóëÿòîðà: ðò T ý Rÿö 0.0056 0.32 2 T Kòï Kîò 2 0.005 51.318 0.0043 0.82 ïîñòîÿííàÿ âðåìåíè ðåãóëÿòîðà: ðò T ý 0.0056 Ïî ïîëó÷åííûì ïàðàìåòðàì ðåãóëÿòîðà ìîæíî ðàñ÷èòàòü ïàðàìåòðû ýëåìåíîòîâ ðåãóëÿòîðà. R ост С ост R qт Uу U зт Ðèñóíîê 2. Ñõåìà ðåãóëÿòîðà òîêà Ïàðàìåòðû ýëåìåíòîâ ðåãóëÿòîðà ðàñ÷èòûâàþòñÿ èñõîäÿ èç ñëåäóþùèõ ôîðìóë: Rîñò ðò Rqò ðò Rîñò Cîñò Cîñò 10 6 Ô Çàäàäèìñÿ çíà÷åíèåì åìêîñòè: Лист Изм. Лист № докум. Подпись Дата Òîãäà çíà÷åíèÿ ñîïðòèâëåíèé ðàâíû: ðò 0.0056 Rîñò 5547.368 Îì Cîñò 10 6 Rqò Rîñò 5547.368 ðò 0.82 6789.099 Îì Íàñòðîéêà êîíòóðà ñêîðîñòè Êîíòóð ñêîðîñòè íàñòðàèâàåòñÿ íà ñèììåòðè÷íûé îïòèìóì. Ïåðåäàòî÷íàÿ ôóíêöèÿ ðàçîìêíóòîãî êîíòóðà ñêîðîñòè: Wðñ ( p) Wíñ ( p) Wñ ( p) ãäå ïåðåäàòî÷íàÿ ôóíêöèÿ íåèçìåííîé ÷àñòè êîíòóðà ñêîðîñòè: Wíñ ( p) ò( p) c Kîñ Jp ðò Kòï ãäå ò ðò T Rÿö p ðò Rÿö p Kòï Kîò ðò ôóíêöèÿ çàìêíóòîãî êîíòóðà òîêà. 2 - ïåðåäàòî÷íàÿ Äëÿ íàñòðîéêè êîíòóðà ñ òàêèì îáúåêòîì íåîáõîäèìî ïðèìåíèòü ÏÈ-ðåãóëÿòîð: Wðñ ( p) ðñ ðñ p 1 ðñ p Êîýôôèöèåíòû ðåãóëÿòîðà äëÿ ïîëó÷åííîé ñèñòåìû íàõîäÿòñÿ ïî ñëåäóþùèì ôîðìóëàì: êîýôôèöèåíò óñèëåíèÿ ÏÈ-ðåãóëÿòîðà: ðñ J Kîò 0.4 0.0043 4 T Kîñ c 4 0.005 0.064 1.232 2.735 ïîñòîÿííàÿ âðåìåíè ðåãóëÿòîðà: ðñ 8 T 8 0.005 0.04 Лист Изм. Лист № докум. Подпись Дата Ïî ïîëó÷åííûì ïàðàìåòðàì ðåãóëÿòîðà ìîæíî ðàñ÷èòàòü ïàðàìåòðû ýëåìåíîòîâ ðåãóëÿòîðà. R осс С осс R qс U зт U зс Ðèñóíîê 3. Ñõåìà ðåãóëÿòîðà ñêîðîñòè Ïàðàìåòðû ýëåìåíòîâ ðåãóëÿòîðà ðàñ÷èòûâàþòñÿ èñõîäÿ èç ñëåäóþùèõ ôîðìóë: Rîññ ðñ Rqñ ðñ Rîññ Cîññ Çàäàäèìñÿ çíà÷åíèåì åìêîñòè: Cîññ 10 6 Ô Òîãäà çíà÷åíèÿ ñîïðòèâëåíèé ðàâíû: ðñ 0.04 Rîññ 40000 Îì Cîññ 10 6 Rqñ Rîññ 40000 ðñ 2.735 14625.229 Îì Äëÿ îãðàíè÷åíèÿ òîêà ÿêîðÿ â ïåðåõîäíûõ ðåæèìàõ íà óðîâíå äîïóñòèìîãî íåîáõîäèìî ââåñòè òîêîîãðàíè÷åíèå, êîòîðîå â ñèñòåìå ïîä÷èíåííîãî ðåãóëèðîâàíèÿ ñâîäèòñÿ ê îãðàíè÷åíèþ ñèãíàëà çàäàíèÿ òîêà. Imax 2.5Ií 2.5 931.82 A 2330 Ñèãíàë çàäàíèÿ òîêà äîëæåí áûòü îãðàíè÷åí íà óðîâíå: Uçòmax Imax Kîò 2330 0.0043 10 B Íàñòðîéêà êîíòóðà ðåãóëèðîâàíèÿ òîêà âîçáóæäåíèÿ Ïåðåäàòî÷íàÿ ôóíêöèÿ ðàçîìêíóòîãî êîíòóðà òîêà âîçáóæäåíèÿ: Wòâ( p) Wðò( p) Wíò ( p) ãäå ïåðåäàòî÷íàÿ ôóíêöèÿ íåèçìåííîé ÷àñòè êîíòóðà òîêà: Wíò ( p) ðòâ p 1 T òâ p 1 ðòâ p T Ô p 1 T òâ p 1 T äòâ p 1 T â T â.ò p 1 Лист Изм. Лист № докум. Подпись Дата Êîíòóð òîêà âîçáóæäåíèÿ íàñòðàèâàåòñÿ íà ìîäóëüíûé îïòèìóì. Äëÿ íàñòðîéêè êîíòóðà ñ òàêèì îáúåêòîì íåîáõîäèìî ïðèìåíèòü ÏÈ-ðåãóëÿòîð: ðòâ Wðòâ( p) ðòâ p 1 ðòâ p Îáðàòíàÿ ñâÿçü ïî òîêó âîçáóæäåíèÿ: Rîâ 17.3 käòâ Umax 10 0.455 380 Uâ Çà ìàëóþ ïîñòîÿííóþ âðåìåíè ïðèíèìàåì ïîñòîÿííóþ âðåìåíè òèðèñòîðíîãî âîçáóäèòåëÿ: T â 0.005 c Êîýôôèöèåíò ïåðåäà÷è òèðèñòîðíîãî âîçáóäèòåëÿ: Uâ kòâ 380 38 10 Umax Ïîñòîÿííàÿ âðåìåíè îáìîòêè âîçáóæäåíèÿ: T îâ 2pw Rîâ K 2 6 750 17.3 0.00638 4.425 Êîýôôèöèåíòû ðåãóëÿòîðà äëÿ ïîëó÷åííîé ñèñòåìû íàõîäÿòñÿ ïî ñëåäóþùèì ôîðìóëàì: êîýôôèöèåíò óñèëåíèÿ ÏÈ-ðåãóëÿòîðà: ðòâ T îâ 2 T â kòâ käòâ Rîâ 4.425 17.3 2 0.005 38 0.455 442.54 ïîñòîÿííàÿ âðåìåíè ðåãóëÿòîðà: ðòâ T îâ ðòâ 4.425 ñ Ïî ïîëó÷åííûì ïàðàìåòðàì ðåãóëÿòîðà ìîæíî ðàñ÷èòàòü ïàðàìåòðû ýëåìåíîòîâ ðåãóëÿòîðà . R ост С ост R qт Uу U зт Ðèñóíîê 4. Ñõåìà ðåãóëÿòîðà òîêà âîçáóæäåíèÿ Лист Изм. Лист № докум. Подпись Дата Ïàðàìåòðû ýëåìåíòîâ ðåãóëÿòîðà ðàñ÷èòûâàþòñÿ èñõîäÿ èç ñëåäóþùèõ ôîðìóë: Rîñò ðòâ Rqò ðòâ Rîñò Cîñò Cîñò 1 10 6 Ô Çàäàäèìñÿ çíà÷åíèåì åìêîñòè: Òîãäà çíà÷åíèÿ ñîïðòèâëåíèé ðàâíû: ðòâ 4.425 Rîñò 4425000 Îì Cîñò 10 6 Rqò Rîñò 4425000 ðòâ 442.54 Îì 5415498.7 Íàñòðîéêà ðåãóëÿòîðà ý.ä.ñ.  êà÷åñòâå ðåãóëÿòîðà ý.ä.ñ. èñïîëüçóåòñÿ È-ðåãóëÿòîð: ðý Wðý( p) p Êîýôôèöèåíòû ðåãóëÿòîðà äëÿ ïîëó÷åííîé ñèñòåìû íàõîäÿòñÿ ïî ñëåäóþùèì ôîðìóëàì: êîýôôèöèåíò óñèëåíèÿ È-ðåãóëÿòîðà: ðý 1 käòâ 1 T â k w c käý í 0.455 0.005 1.2 1000 1.232 0.052 157.08 0.007 Ïî ïîëó÷åííûì ïàðàìåòðàì ðåãóëÿòîðà ìîæíî ðàñ÷èòàòü ïàðàìåòðû ýëåìåíîòîâ ðåãóëÿòîðà. Сосс Rqс Uзс Uзт Ðèñóíîê 5. Ñõåìà ðåãóëÿòîðà ý.ä.ñ. Лист Изм. Лист № докум. Подпись Дата Ïàðàìåòðû ýëåìåíòîâ ðåãóëÿòîðà ðàñ÷èòûâàþòñÿ èñõîäÿ èç ñëåäóþùèõ ôîðìóë: 1 ðý Cîññ Rqñ Cîññ 10 6 Çàäàäèìñÿ çíà÷åíèåì åìêîñòè: Ô Òîãäà çíà÷åíèÿ ñîïðòèâëåíèé ðàâíû: Rqñ 1 1 Cîññ ðý 10 6 0.007 1.318 108 Îì Ïåðåäàòî÷íàÿ ôóíêöèÿ ðåãóëÿòîðà ïîëîæåíèÿ Wðï ( p) kc KRM 8 ãäå KRM êîýôôèöèåíò 2T ïåðåäà÷è ìåõàíèçìà Ðèñóíîê 6. Ñõåìà ðåãóëÿòîðà ïîëîæåíèÿ Ïàðàìåòðû ýëåìåíòîâ ðåãóëÿòîðà ðàñ÷èòûâàþòñÿ èñõîäÿ èç ñëåäóþùèõ ôîðìóë: Rîðï ðï Rçï Çàäàâøèñü çíà÷åíèÿì ñîïðîòèâëåíÿ: Rîðï 1000 Îì Ïîëó÷èì: Rçï Rîðï ðï 1000 4 250 Îì Лист Изм. Лист № докум. Подпись Дата Ïåðåäàòî÷íàÿ ôóíêöèÿ êîìïåíñàöèè ñêîðîñòíîé îøèáêè W ( p) kc KRM p Ïîäñòàâèì ÷èñëîâûå çíà÷åíèÿ W ( p) 0 064 9 ð 0 576 ð Rоск Сqк Rqк Uзп Uк Ðèñóíîê 7. Óçåë êîìïåíñàöèè ñêîðîñòíîé îøèáêè Ïî ïîëó÷åííîìó êîýôôèöèåíòó ïåðåäà÷è ìîæíî ðàññ÷èòàòü ïàðàìåòðû ýëåìåíòîâ óçëà, èñõîäÿ èç ñëåäóþùèõ ôîðìóë: b Cqê Rîñê ' ê Cqê Rqê Rqê<< << Rîñê R qê Rîñê Çàäàâøèñü çíà÷åíèåì çíà÷åíèåì åìêîñòè åìêîñòè Çàäàâøèñü 4 Cqê 10 4 Ô, ìîæíî ðàñ÷èòàòü C qê 10 Ô, ìîæíî ðàñ÷èòàòü çíà÷åíèÿ ñîïðîòèâëåíèé: ñîïðîòèâëåíèé: çíà÷åíèÿ Rîñê b Cqê 0 576 4 3 5 76 10 Îì 10 Äëÿ óìåíüøåíèÿ âëèÿíèÿ èíåðöèîííîñòè äèôôåðåíöèàëüíîãî ðåãóëÿòîðà íà ðàáîòó ñèñòåìû, çàäàäèìñÿ çíà÷åíèåì ïîñòîÿííîé âðåìåíè ðåãóëÿòîðà ' ê 0.0001 c Rqê ' ê 0.0001 Cqê 4 1 Îì 10 Лист Изм. Лист № докум. Подпись Дата Подаем на вход линейно-возрастающий сигнал Рисунок 8. График по скорости и току при Uз=10 Рисунок 10. График по ошибке входному и выходному сигналу при Uз=1 Рисунок 9. График по ошибке входному и выходному сигналу при Uз=10 Рисунок 11. График по скорости и току при Uз=1 Подаем на вход ступенчатый сигнал Рисунок 12. График по скорости и току при Uз=1 Рисунок 13. График по ошибке входному и выходному сигналу при Uз=1 Лист Изм. Лист № докум. Подпись Дата Рисунок 14. График по ошибке входному и выходному сигналу при Uз=10 Рисунок 15. График по скорости и току при Uз=10 Рисунок 16. График по скорости и току при Uз=1 и К=1,2 Рисунок 17. График по ошибке входному и выходному сигналу при Uз=1 и К=1,2 Рисунок 18. График по ошибке входному и выходному сигналу при Uз=1 и К=0.3 Рисунок 19. График по скорости и току при Uз=1 и К=0.3 Лист Изм. Лист № докум. Подпись Дата Подаем нагрузку Рисунок 20. График по скорости и току при номинальной нагрузке (Мн=1148 Н) Рисунок 22. График по скорости и току при нагрузке (М=150 Н) Рисунок 21. График по ошибке входному и выходному сигналов при номинальной нагрузке (Мн=1148 Н) Рисунок 23. График по ошибке входному и выходному сигналов при нагрузке (М=150 Н) Целью моделирование является уточнение расчетных значений параметров регуляторов, влияния нагрузки, влияние ограничений накладываемых на отдельные координаты и др. факторов. В ходе выполнения курсового проекта были рассчитаны и выбраны основные элементы электропривода, проведена настройка его регуляторов в соответствии с техническими требованиями. В результате моделирования системы были получены динамические характеристики привода. Полученные графики удовлетворяют требуемым показателям качества переходных процессов, форма графиков выбранным настройкам регуляторов тока, скорости, положения. Лист Изм. Лист № докум. Подпись Дата Заключение В ходе выполнения курсового проекта был разработан и рассчитан электропривод главного движения карусельного станка. Рассчитаны и выбраны основные элементы электропривода и произведена настройка его регуляторов в соответствии с техническими требованиями. Был смоделирован данный электропривод в результате были получены динамические характеристики из которых можно сделать вывод что после система требует дополнительной настройки датчиков в контуре тока так как переходный процесс слишком затянутый данная нелинейность могла возникнуть в результате ввода в систему ограничителя тока (остальные нелинейности например силы трения учитываются). После дополнительной отстройки в данной модели не регуляторов вид переходных процессов удовлетворяет техническим требованиям. При моделировании системы в PSM учитываем токоограничение нелинейного элемента и с учетом полученных переходных процессов делам вывод о работоспособности системы и о возможных ее улучшениях за счет изменения параметров регуляторов. Ошибка положения также удовлетворяет требованиям и не требует ввода ПИ-регулятора. Лист Изм. Лист № докум. Подпись Дата Список используемых источников 1. Дерюжкова Н.Е., Горячев В.Ф. Расчеты по автоматизированному электроприводу металлорежущих станков; Учебное пособие - Хабаровск; 1985г. 2. Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами: Учебное пособие для вузов. - Л: Энергоиздат, 1982г. 3. Чернов Е.А., Кузьмин В.П. Комплектные электроприводы станков с ЧПУ: Справочное пособие. - Горький: Волго-Вятское книжное издательство, 1989г. 4. Справочник по проектированию автоматизированного электропривода и систем управления технологическими процессами./ Под ред. В.И. Круповича - М: Энергоиздат, 1982г. 5. Михайлов О.П. Автоматизированный электропривод станков и промышленных роботов: Учебник для вузов. - М: Машиностроение, 1990г. Лист Изм. Лист № докум. Подпись Дата