УДК 621. 396. 96 + 621. 391. 26
ПАО «НПО «Алмаз» им. Академика А.А. Расплетина
Б.М. Вовшин
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ РАДИОЛОКАЦИОННОГО
НАБЛЮДЕНИЯ ЦЕЛЕЙ
Учебник
Москва 2021
ББК
В.61
УДК 621.396.96 + 621.391.26
1
В
учебнике
радиолокационного
подходов.
рассматриваются
наблюдения
Синтезируются
теоретические
целей
методы
и
на
основы
основе
устройства
этапов
статистических
согласованной
и
оптимальной обработки радиолокационных сигналов на фоне шумов и
помех соответственно. Для задач обнаружения, разрешения и измерения
координат целей определяются и анализируются соответствующие
показатели качества.
2
Предисловие
I
Интернет – величайшее достижение человечества.
Все, больше не нужны выматывающие хлопоты для получения ответа
на любой вопрос, любой сложности, в любой области знаний.
Все, больше не нужны учебники. Одно нажатие кнопки и наше
невежество исчезает сиюминутно.
Интернет так избаловал пользователей, что, после получения ответа
на свой вопрос, уже никто не задает второй вопрос – откуда следует этот
ответ и является ли он единственно возможным? Для молодых людей,
решивших посвятить себя науке, почти святая вера в интернет, не просто
опасна, она губительна.
Учащиеся ВУЗов, аспиранты и большинство молодых специалистов
уже практически не пользуются книгами, в которых излагаются
теоретические
основы
их
специальности.
Под
исследованиями
и
разработками они понимают компьютерное моделирование различных
вариантов, и крайне редко применяют аналитические формулы. В
результате учащиеся и молодые специалисты отстраняются от физического
понимания
процессов.
Систематизированные
базовые
знания
они
подменяют эмпирическим перебором параметров или интуитивным
подходом, в лучшем случае на основе предыдущего опыта, если таковой
вообще имеется. Как следствие – огромные временные и интеллектуальные
затраты
на
повторное
изобретение
«велосипеда»,
оптимальными параметрами. Это особенно
науки, как «Радиолокация».
далеко
не
с
заметно в такой отрасли
Дошло до того, что ее стали рассматривать
лишь малозначительной ветвью информационных технологий.
Развитие теории радиолокации замедлилось. Значительно сократился
приток молодых ученых, способных поддерживать преемственность в
3
научной среде отрасли. Невероятно снизился количественный, а главное
качественный уровень публикаций, диссертаций, а на радиолокационных
научно-технических конференциях крайне редко докладываются реальные
научные достижения.
И это при том, что сегодня признано всеми – российская (советская)
научная школа радиолокации, наряду с американской, является ведущей в
мире. Сейчас лишь РФ и США являются основными производителями
широкого спектра радиолокационных средств военного и гражданского
назначения. Радиолокация – это та отрасль, где наша страна не только
конкурентно способна в мире, но и по своему уровню опережает Англию,
Францию, Германию, Японию, Китай и т.д. В большинстве этих стран
научная школа радиолокации вообще отсутствует.
России крайне важно удержаться на вершине этой пирамиды,
развивая радиолокационную науку в современных условиях «цифровой»
эпохи. Последнее требует особого пояснения.
В СССР был накоплен огромный объем научного материала,
показывающий, каким образом следует оптимизировать (в статистическом
смысле) построение РЛС и их составных частей. Во многом эти методы и
алгоритмы в «доцифровую», аналоговую, эпоху не были реализованы, так
как
требовали
недостижимой
производительности.
Сейчас
для
того
ситуация
времени
вычислительной
кардинально
изменилась.
Современные процессоры способны реализовать в реальном времени
многие алгоритмы пространственной и временной обработки сигналов, в
том числе адаптивные. Как уже отмечалось, именно необходимая скорость
вычислений ранее была камнем преткновения для внедрения оптимальных
подходов к созданию РЛС, рекомендованных теорией.
Можно считать, что сейчас эти ограничения во многом сняты, тем
более, что «дети» гаджетов и ЕГЭ – современные выпускники ВУЗов, как
4
правило, имеют хорошие навыки программирования и проявляют большой
интерес
ко
всему
«цифровому».
Однако,
фрагментарность
и
несистематичность знаний в области теории радиолокации крайне сужают
область их деятельности и не позволяют осмыслить конечный результат
разработки. В результате сегодня отчетливо видна тенденция развития
радиолокации в сторону совершенствования технологии практически без
учета рекомендаций теории. В последнее время мы часто наблюдаем как
на новой цифровой элементной базе постоянно повторяются решения
70-х – 80-х годов прошлого века, реализованные в старых «аналоговых»
РЛС. В то же время качественный скачок здесь может произойти только на
основе объединения ранее невостребованных теоретических достижений с
современными
цифровыми
высокопроизводительные
технологиями.
вычислительные
Эти
технологии
средства
и
открывают
принципиально новые возможности перед радиолокацией.
В первую очередь это оносится к реализации адаптивной работы РЛС
в
условиях
складывающейся
сигнально-помеховой
обстановки
с
показателями качества, близкими к оптимальным. Заметим, что в
последнее время любую адаптирующуюся технику на основе «обучения»
стали почему-то называть «искусственным интеллектом», что совершенно
неверно. В любую теорию, в том числе адаптации, вкладывается алгоритм,
созданный интеллектом человека в условиях определенных ограничений и
на основе выбранного критерия. Причем ограничения и критерии всегда
являются продуктом человеческих знаний и опыта. К такому алгоритму
сколь угодно высокопроизводительный вычислитель вряд ли может что-то
добавить.
Цель написания настоящего учебника – вовлечь в интереснейшую
область
науки,
теорию
радиолокации,
учащихся
и
специалистов
радиотехнических специальностей, а также тех, кто учится и работает в
области цифровых и информационных технологий, используемых в
5
радиоэлектронных системах. Но не только вовлечь, но и дать базовые
теоретические навыки в подходах к проектированию РЛС и пониманию
предельных возможностей их работы.
Самому автору в этом смысле повезло. В институте (МАИ) и
аспирантуре (ВНИИРТ) его учили такие корифеи-профессора в области
радиотехники и радиолокации, как П.А. Бакулев, Д.И. Воскресенский, И.С.
Гоноровский,
Б.Р.
Левин,
М.С.
Нейман.
В
своей
практической
деятельности посчастливилось общаться и работать с людьми с не менее
громкими именами: А.Р. Вольпертом, А.К. Журавлевым, Д.И. Леховицким,
В.С. Черняком, Я.Д. Ширманом и многими другими замечательными
специалистами. К сожалению, большинства из них уже нет с нами, но все
они оставили глубокий след в профессии и памяти автора.
II
Теперь непосредственно о содержании учебника.
Но прежде, несколько общих замечаний.
Для чего нужна радиолокация человеку и откуда она появилась?
Ответы на поверхности.
У человека пять органов чувств. Все они призваны контролировать
внешнюю среду, преследуя одну цель – обезопасить существование
человека в этой среде. Для того, чтобы два из них (осязание и вкус) не
ошиблись, зрение, слух и обоняние решают эту задачу на расстоянии. При
этом человек всегда стремился контролировать большее расстояние, чем
доступно его органам чувств, в первую очередь зрению, как наиболее
достоверному
источнику
информации.
Должно
произойти
что-то
экстраординарное, чтобы мы произнесли: «Не верю глазам своим!».
Чтобы иметь превосходство над противником, будь это враги или
агрессивные животные, человек залезал на дерево и готовился к
отражению атаки. Для этой же цели, но для несравненно больших
6
дальностей контроля над ситуацией и были созданы радары. В военной
сфере они позволяют заранее «увидеть» противника, организовать оборону
или пресечь его несанкционированные действия. В области управления
воздушным движением РЛС – основной элемент системы безопасности
полетов в районе аэродромов и на трассах.
Радиолокация, как и вся техносфера, большинство своих идей и
принципов заимствует у живой природы. Причем здесь схожесть
искусственных сенсоров с живыми особенно наглядна. Например,
распространенная в радиолокации антенна в виде ФАР по принципу
действия является полным аналогом человеческого глаза. Только у глаза
роль фазовращателей и аттенюаторов играют размещенные на сетчатке
колбочки и палочки. Они, подобно элементам ФАР, обеспечивают
быстрый обзор пространства и фокусирование на объект.
В середине прошлого века академик Б. Раушенбах, создавший
навигационные системы первых отечественных космических аппаратов, в
том числе и для полета Ю. Гагарина, задался вопросом: «почему
художники часто говорят: «Я так вижу»?». Он пытался понять, по какой
причине русские иконы Рублева, Дионисия, Черного и др. так отличаются
от икон итальянского Возрождения? Неужели русские иконописцы не
знали правил пропорции? Конечно, знали. Просто в основе лежала другая
концепция. Используя математические формулы, Раушенбах доказал, что
в древней Руси иконы рисовались для ближней зоны Френеля, т.е. так, как
человек видит вблизи, когда целует икону. Итальянские же мастера
рисовали дальнюю зону и соблюдали правило перспективы – уменьшение
по мере удаления. В теорию Раушенбаха не вписывались только картины
некоторых импрессионистов, в частности, пейзажи Матисса. Однако
дальнейшие исследования академика показали, что Матисс видел и
рисовал промежуточную зону Фраунгофера. Это отступление наглядно
7
демонстрирует единство законов, на которых основаны природные и
искусственные сенсоры.
В то же время высокоэффективная обработка поступающей
информации в «компактных мозгах» живых существ наглядно доказывает,
что человеческому разуму еще далеко до достижений эволюции.
Достаточно сказать, что возможное количество сочетаний, перестановок и
прочих комбинаций клеток в мозге(у?) человека превышает число молекул
в известной нам Вселенной. Интеллектуальные возможности всех
компьютеров
современных
радаров,
вместе
взятых
и
близко
не
приблизились к мозгу одного человека, способного к абстрактному
мышлению. Отчасти отставание систем обработки сигналов и информации
в РЛС от мозгов дельфинов, летучих мышей и даже глубоководных рыб
объясняется тем, что радиолокация развивалась как измерительная
техника, а живые сенсоры – как информационные системы.
У них радиолокаторы выигрывают в дальности и точности, правда
при непропорционально увеличенных размерах и энергопотреблении. Зато
в задачах, где требуется сообразительность: разрешение и распознавание
объектов, а также в адаптации к внешней обстановке современные РЛС
еще очень далеки от любого живого сенсора. Даже в простых сигнальнопомеховых
ситуациях
этапы
радиолокационного
наблюдения:
обнаружение, разрешение, измерение и распознавание – в радарах
решаются последовательно, часто со сменой режимов, что приводит к
значительным энергетическим и/или временным затратам. Напротив, в
живой природе все указанные этапы реализуются параллельно, т.е.
практически мгновенно. В настоящее время необходимость адаптации к
внешней обстановке и быстрое развитие вычислительных средств
стимулируют первые шаги к созданию «когнитивных» (думающих) РЛС.
В данном учебном пособии намеренно не ставится задача ответить на
вопрос: как именно устроены РЛС различного назначения? Здесь
8
излагаются лишь основные теоретические принципы, на которых они
должны строиться без конкретизации путей их реализации, которых может
быть огромное количество.
Первые два раздела по существу являются справочными и содержат
обязательную информацию, с которой начинается любой учебник по
радиолокации. В первом разделе представлены классификация РЛС и
основные определения их тактико-технических характеристик. Второй
раздел
посвящен
уравнению
радиолокационной
дальности,
его
модификациям в зависимости от особенностей антенных систем и
распространения радиоволн, а также способам обзора пространства.
Последующие
четыре
раздела
последовательно
раскрывают
статистические подходы к этапам радиолокационного наблюдения. По
существу, все они базируются на едином методе – вычислении отношения
правдоподобия,
который
требует
адекватных
моделей
законов
распределения случайных помех и параметров сигналов. Почему этот
метод
является
основополагающим
и
универсальным
в
теории
радиолокации? Это объясняется тем, что здесь мы имеем дело только со
стохастическими процессами, которые нельзя свести к аккуратным
математически формулам, описывающим детерминированные явления.
На результаты радиолокационного наблюдения влияет огромное
число случайных факторов: внешних (помехи, условия распространения,
свойства
целей)
и
внутренних
(собственные
шумы,
флюктуации
параметров, ошибки вычислений). Поэтому предсказание результатов
радиолокационного наблюдения целей возможно только с некоторой
вероятностью. Априорно, принятые модели могут не совпадать с реальной
ситуацией.
Поэтому
радиолокаторов
и
в
основу
положено
статистической
отношение
оптимизации
правдоподобия,
которое
показывает, насколько одна гипотеза правдоподобнее другой при
принятых
моделях
случайных
процессов.
9
Это
очень
напоминает
человеческую логику при принятии любых решений. Например, не имея
информации о погоде, в октябре мы скорее всего выйдем на улицу с
зонтиком, а в июле – нет. Наш опыт показывает, что в осенний период
вероятность дождя гораздо выше, чем летом. Как стратегия такой способ
принятия решений правильный, так как мы минимизируем риск
промокнуть. Однако это не означает, что в июле мы никогда не попадем
под дождь, а в октябре не будем напрасно носить зонт.
Аналогичные решения рекомендует и теория радиолокации. Самая
совершенная РЛС со статистически оптимальными алгоритмами работы,
конечно,
может
«прозевать»
цель,
а
вот
какое-нибудь
старое,
«допотопное» изделие ее обнаружит. Однако результат наблюдения
большого числа целей в различных условиях обязательно докажут
преимущества РЛС с точно реализованными статистически оптимальными
алгоритмами. Именно их синтезу посвящена основная часть книги, что
находится сейчас в ваших руках.
Систематическое изложение накопленных знаний – цель любого
учебника, будь то учебник по арифметике, химии, физики, биологии.
Настоящий учебник не исключение. Потому не ищите в нем каких-либо
новых научных откровений.
Здесь изложены известные положения и подходы. Автор, в меру
своих сил, старался подать их наиболее доходчиво, опустив многие
подробности, но не в ущерб строгости. Для помощи в освоении материала
основное внимание в учебнике уделяется пояснениям, интерпретациям и
иллюстрациям, а многие математические выкладки перенесены в
Приложения. Помимо практической работы и преподавания теории
радиолокации, в отборе материала автор опирался на собственный опыт.
Наиболее подробно в учебнике рассматриваются вопросы, которые когдато, ещё в период учебы в институте, плохо усваивались самим автором.
10
В заключение повторюсь, настоящий учебник преследует одну
единственную цель – заинтересовать способных и амбициозных, молодых
людей
невероятно
нужной,
наукоемкой,
и
потому
не
простой
специальностью – радиолокацией. В этой науке огромный потенциал
развития.
Думается,
будет
уместным
замкнуть
предисловие
словами
В.О. Ключевского: «Науку часто смешивают со знанием. Это глубокое
недоразумение. Наука ни только знание, но и сознание, то есть умение
использовать знание».
Буду считать свою задачу выполненной, если полученные знания
помогут вам не только в учебе, но и в создании нового.
С наилучшими пожеланиями
Б.М. Вовшин.
11
Содержание
Спикок сокращений ............................................................................................................. 15
1.Общие сведения о радиолокации и радиолокационной информации ............................. 18
1.1.Определения и информационные задачи радиолокации .............................................. 18
1.2.Виды радиолокации ....................................................................................................... 21
1.3.Основные тактико-технические характеристики РЛС и оптимизация их реализации 24
1.4.Принципы получения информации о координатах целей ............................................ 30
1.4.1.Физические основы получения информации в активных РЛС и их построение. ..... 30
1.4.2.Принципы определения дальности до целей. ............................................................ 37
1.4.3.Принцип определения радиальной скорости целей. .................................................. 39
1.4.4.Принцип определения угловых координат целей при пространственно-временной
модуляции сигналов. ........................................................................................................... 42
1.5.Физические принципы разрешения целей в активных РЛС. ........................................ 47
1.5.1.О понятии «рэлеевское разрешение» ......................................................................... 47
1.5.2.Разрешающая способность по дальности ................................................................... 49
1.5.3.Разрешающая способность по радиальной скорости ................................................. 51
1.5.4.Разрешающая способность по угловой координате ................................................... 52
1.5.5.Угловое разрешение при синтезировании апертуры ................................................. 54
1.6.Помехи и их математические модели. .......................................................................... 58
2.Дальность действия РЛС и методы обзора пространства ............................................... 62
2.1.Уравнение дальности совмещенного радиолокатора в свободном пространстве. ...... 62
2.2.Модификации уравнения дальности и зоны обнаружения. .......................................... 65
2.3.Влияние помех на дальность действия и зону видимости РЛС ................................... 69
2.4.Влияние Земли на дальность действия и зону видимости РЛС ................................... 72
2.5.Влияние атмосферы на дальность действия и зону видимости РЛС ........................... 79
2.5.1.Эффект рефракции ...................................................................................................... 79
2.5.2.Затухание волн в атмосфере ....................................................................................... 83
2.5.3.Затухание волн в гидрометеорах ................................................................................ 85
2.6.Обзор пространства ....................................................................................................... 87
2.6.1.Классификация способов обзора ................................................................................ 87
2.6.2.Методы обзора пространства по угловым координатам............................................ 90
2.6.3.Влияние способа обзора на дальность действия РЛС ................................................ 97
2.7.Обзор пространства в РЛС с ФАР ................................................................................. 99
2.8.Частотные диапазоны РЛС ...........................................................................................106
3.Одноканальное обнаружение радиолокационных сигналов на фоне некоррелированных
стационарных гауссовских помех ......................................................................................112
3.1.Критерии оптимальности и показатели качества обнаружения. .................................112
3.2.Отношение правдоподобия. Критерий Неймана-Пирсона. .........................................118
3.3.Обнаружение сигнала с полностью известными параметрами на фоне
некоррелированного гауссовского шума ...........................................................................123
3.3.1.Отношение правдоподобия и обнаружители дискретизированного сигнала с
полностью известными параметрами .................................................................................124
3.3.2.Отношение правдоподобия и обнаружители аналогового сигнала с полностью
известными параметрами ...................................................................................................128
3.3.3.Показатели
качества
обнаружения
сигналов
с
полностью
известными параметрами ..................................................................................................132
3.3.4.Достаточные
статистики
при
обнаружении
узкополосных
высокочастотных сигналов ................................................................................................135
3.4.Обнаружение когерентных сигналов со случайными параметрами при на фоне
некоррелированного гауссова шума ..................................................................................137
3.4.1.Методика вычисления отношения правдоподобия для когерентных сигналов со
случайными неинформативными параметрами .................................................................137
12
3.4.2.Отношение правдоподобия и корреляционные обнаружители сигнала со случайной
начальной фазой .................................................................................................................139
3.4.3.Отношение правдоподобия при обнаружении сигнала со случайными амплитудой и
начальной фазой .................................................................................................................143
3.4.4.Показатели качества обнаружения когерентных сигналов со случайными
параметрами. Кривые обнаружения ...................................................................................146
3.4.5.Корреляционные обнаружители сигналов с неизвестными временем запаздывания и
доплеровской частотой .......................................................................................................150
3.5.Обнаружение некогерентных сигналов ........................................................................152
3.5.1.Отношение правдоподобия и фильтровой обнаружитель некогерентной пачки
радиоимпульсов ..................................................................................................................152
3.5.2.Показатели качества обнаружения некогерентной пачки радиоимпульсов ............158
4.Согласованная обработка когерентных радиолокационных сигналов. Функции
рассогласования (неопределенности). ...............................................................................163
4.1.Согласованные фильтры и их характеристики ............................................................163
4.1.1.Импульсная характеристика согласованного фильтра .............................................163
4.1.2.Частотная характеристика согласованного фильтра ................................................168
4.1.3.Отношение сигнал/шум на выходе согласованного фильтра ...................................173
4.2.Согласованные фильтровые обнаружители когерентных сигналов ............................175
4.3.Примеры фильтровых устройств согласованной обработки радиолокационных
сигналов ..............................................................................................................................179
4.3.1.Согласованная фильтрация одиночного радиоимпульса без внутриимпульсной
модуляции ...........................................................................................................................179
4.3.2.Согласованная
фильтрация
линейно-частнотно-модулированного
(ЛЧМ)
радиоимпульса ....................................................................................................................185
4.3.3.Согласованная фильтрация фазоманипулированного сигнала .................................189
4.3.4.Согласованная фильтрация когерентной пачки радиоимпульсов ............................195
4.4.Функции рассогласования (неопределённости). Основные определения ...................201
4.5.Свойства и характеристики частотно-временной функции неопределённости. .........206
4.6.Функции неопределённости радиолокационных сигналов. ........................................213
4.6.1.Сигнал с «идеальной» ФН. ........................................................................................213
4.6.2.ФН одиночного узкополосного радиоимпульса. ......................................................215
4.6.3.ФН когерентной пачки немодулированных радиоимпульсов. .................................217
4.6.4.ФН Линейно-частотно-модулированный радиоимпульса. .......................................221
4.6.5.ФН фазоманипулированных радиоимпульсов ..........................................................225
5.Многоканальное
обнаружение
сигналов
на
фоне
коррелированных
гауссовских помех .............................................................................................................229
5.1.Многоканальные обнаружители дискретизированного сигнала с полностью
известными
параметрами
на
фоне
нестационарных
коррелированных гауссовских помех ...............................................................................229
5.2.Схемы многоканальных обнаружителей в зависимости от представлений
корреляционной матрицы ...................................................................................................235
5.3.Пример оптимальной обработки двухэлементной выборки. Показатели ее качества 241
5.4.Показатели качества многоканального обнаружителя ................................................246
5.5.Многоканальные обнаружители аналоговых сигналов с известными параметрами на
фоне коррелированных гауссовских помех .......................................................................248
5.6.Достаточные статистики при многоканальном обнаружении узкополосных
высокочастотных сигналов с известными и случайными параметрами ...........................254
5.7.Обработка аналогового сигнала в РЛС с антенной решеткой. ....................................257
5.7.1.Согласованная обработка сигнала в РЛС с антенной решеткой ..............................257
5.7.2.Оптимальная обработка сигнала на фоне активной шумовой помехи в РЛС с антенной
решеткой .............................................................................................................................261
5.7.3.Пример
оптимальной
двухканальной
обработки
на
фоне
активной
шумовой помехи .................................................................................................................265
13
5.8.Оптимальная обработка в антенной решетке с выделенным каналом согласованной
обработки. ...........................................................................................................................268
5.8.1.Структурная схема оптимальной обработки .............................................................268
5.8.2.Результирующая ДН оптимальной обработки ..........................................................272
5.8.3.Коэффициент использования энергии .......................................................................274
5.9.Оптимальная
обработка
аналогового
сигнала
на
фоне
стационарного
небелого шума ...................................................................................................................278
5.9.1.Оптимальная обработка на фоне пассивных помех ..................................................278
5.9.2.Свойства и характеристики пассивных помех ..........................................................285
5.9.3.Устройства СДЦ и их характеристики. .....................................................................288
6.Основы статистической теории разрешения и измерения координат целей. ................297
6.1.Связь разрешающей способности с функциями неопределенности радиолокационных
сигналов. Постоянные разрешения. ...................................................................................297
6.2.Оптимальное и согласованное «обнаружение – разрешение» ....................................308
6.3.Методы и показатели качества радиолокационных измерений. .................................317
6.3.1.Статистические подходы к оптимизации измерений координат целей. ..................317
6.3.2.Оптимизация оценок по критерию минимума среднего риска. ...............................320
6.3.3.Показатели качества регулярных измерений (корреляционная матрица ошибок). .326
6.3.4.Потенциальные точности оценивания параметров (граница Крамера-Рао).............328
6.4.Связь статистических теорий обнаружения и измерений. ..........................................331
6.5.Потенциальные точности раздельного и совместного измерения времени запаздывания
и доплеровской частоты. ....................................................................................................335
6.5.1.Оценка времени запаздывания. .................................................................................335
6.5.2.Оценка доплеровской частоты. .................................................................................337
6.5.3.Точность
совместного
измерения
времени
запаздывания
и
доплеровской частоты. .......................................................................................................339
6.6.Измерение частотно-временных параметров когерентных сигналов .........................342
6.6.1.Регулярное измерение неэнергетических параметров когерентных сигналов. .......342
6.6.2.Структуры дискриминаторов времени запаздывания и частоты ..............................346
6.7.Измерение угловых координат источников когерентных сигналов ............................350
6.7.1.Точностные характеристики при измерении угловых координат. ...........................350
6.7.2.Двухканальный фазовый пеленгатор. .......................................................................354
6.7.3.Двухканальный амплитудный дискриминатор. ........................................................359
Приложение 1 .....................................................................................................................365
Приложение 2 .....................................................................................................................375
Приложение 3 .....................................................................................................................382
Приложение 4 .....................................................................................................................384
Приложение 5 .....................................................................................................................386
Приложение 6 .....................................................................................................................388
Приложение 7 .....................................................................................................................394
Приложение 8 .....................................................................................................................396
Приложение 9 .....................................................................................................................398
Приложение 10 ...................................................................................................................400
Приложение 11 ...................................................................................................................402
Рекомендованная литература .............................................................................................404
14
СПИКОК СОКРАЩЕНИЙ
АД – амплитудный детектор
АКФ – автокорреляционная функция
АП – антенный переключатель
АР – антенная решетка
АРУ – автоматическая регулировка усиления
АФР – амплитудно-фазовые распределения
АЦП – аналого-цифровой преобразователь
АЧС – амплитудно-частотный спектр
ФЧХ – амплитудно-частотная характеристика
АШП – активная шумовая помеха
БГШ – белый гауссовый шум
ВКР – взаимно корреляционная функция
ВЛТ – вероятность ложной тревоги
ВПО – вероятность правильного обнаружения
ВУ – вычислительное устройство
ГОН – генератор опорного напряжения
ГФН – гребенчатый фильтр накопления
ГФП – гребенчатый фильтр подавления
ДЛЗ – дисперсионная линия задержки
ДН – диаграмма направленности
ДПФ – дискретное преобразование Фурье
ЗС – зондирующий сигнал
ИКО – индикатор кругового обзора
ИУ – индикаторное устройство
ИХ – импульсная характеристика
КМ – корреляционная матрица
КПК – коэффициент пространственной корреляции
ЛА – летательный аппарат
15
ЛЗ – линия задержки
ЛЧМ – линейная частотная модуляция
МАР – многолучевая антенная решетка
МП – максимальное правдоподобие
МШУ – малошумящий усилитель
НН – некогерентный накопитель
ОМП – оценка максимального правдоподобия
ОСП – отношение сигнал/помеха
ОСШ – отношение сигнал/шум
ПВ – плотность вероятности
ПП – пассивная помеха
ПУ – пороговое устройство
РВ – радиоволны
РЛС – радиолокационная станция
РСН – равносигнальное направление
РПрУ – радиоприемное устройство
РУ – решающее устройство
СА – синтезированная апертура
СВЧ – сверхвысокая частота
СДЦ – селекция движущихся целей
СМ – смеситель
СФ – согласованный фильтр
СФОИ – согласованный фильтр одиночного импульса
ТТХ – тактико-технические характеристики
УБЛ – уровень боковых лепестков
УПЧ – усилитель промежуточной частоты
ФАР – фазированная антенная решетка
ФВ – фазовращатель
ФМ – фазовая модуляция (манипуляция)
16
ФН – функция неопределенности
ФР – функция рассогласования
ФЧС – фазочастотный спектр
ФЧХ – фазочастотная характеристика
ЧПВ – череспериодные вычитания
ЧХ – частотная характеристика
ЭПР – эффективная поверхность рассеяния
ЭЭДС – эффективная энергетическая длительность сигнала
ЭЭШС – эффективная энергетическая ширина спектра
ЭЛИ – эквивалентный линейный источник
17
1. ОБЩИЕ СВЕДЕНИЯ О РАДИОЛОКАЦИИ И
РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ
Данный раздел посвящен формулировке понятий, классификации задач и видам
радиолокации. На этой основе даются определения основным этапам
радиолокационного наблюдения целей, а также рассматриваются тактико-технические
требования, предъявляемые к РЛС по назначению. Излагаются физические принципы,
на которых основаны методы извлечения информации из обнаруженных сигналов,
отраженных от радиолокационных целей. Приводится классификация помех,
затрудняющих извлечение информации из принятых РЛС сигналов.
1.1.
Определения и информационные задачи радиолокации
Радиолокация
–
отрасль
радиоэлектроники,
обеспечивающая
получение сведений об объектах путем приема и анализа радиоволн.
Термин радиолокация составлен из латинских слов “locus” – место и
“radio” – излучение, характеризующих важнейшую из решаемых задач
(определение координат) и путь её решения. В радиолокации применяются
электромагнитные волны радиодиапазона. Однако методы радиолокации
широко распространены и в теплолокации, и в оптической локации, где
используются
инфракрасные
и
световые
колебания,
а
также
в
звуколокации, основанной на использовании ультразвуковых колебаний в
упругой среде.
Объекты, сведения о которых надлежит получать, называют
радиолокационными целями. Радиолокационные цели подразделяются на
аэродинамические (самолеты, крылатые ракеты, вертолеты), наземные и
надводные (автомашины, танки, корабли), космические (спутники,
баллистические ракеты), природного происхождения (облака, метеоры,
планеты) и другие.
Совокупность
сведений
о
целях,
получаемых
методами
радиолокации, называют радиолокационной информацией. Технические
средства
получения
радиолокационной
информации
называют
радиолокационными средствами, радиолокационными станциями (РЛС)
18
или радиолокаторами. Радиолокационные средства могут объединяться в
радиолокационные системы.
Радиолокационные средства и системы получают информацию из
принимаемых радиосигналов. Анализируя принимаемые радиосигналы,
эти системы решают следующие основные информационные задачи:
– обнаружение объектов;
– разрешение объектов;
– измерение координат и параметров движения объектов;
– классификация объектов.
Совокупность этих информационных задач охватывается термином
радиолокационное наблюдение, а последовательность их решения – его
этапами. Этапность радиолокационного наблюдения определяется тем, что
на каждом этапе извлекается существенно разная информация, например,
информация о количестве целей и их координатах существенно разнлична.
Обнаружение состоит в принятии решения о наличии или отсутствии
цели
в
выделенном
для
наблюдения
элементе
пространства
с
минимальными вероятностями ошибок.
Разрешение
заключается
в
обнаружении
и
(или)
измерении
координат и параметров движения произвольной цели при наличии в
наблюдаемом участке пространства других целей.
19
Начальное направление
( север)
V
Rц
ц
Vrц
Цель
ц
РЛС
Рис. 1.1. Измеряемые координаты цели
Измерение сводится к принятию решения о значениях координат и
параметрах движения цели с минимальными погрешностями. Измеряют в
первую очередь сферические координаты цели – дальность до цели Rц , её
угол места ц , азимут ц (Рис. 1.1) и производные отдельных координат,
например, радиальную скорость V r dR ц / dt . Число и вид измеряемых
координат цели и параметров её движения определяются назначением
РЛС.
На Рис. 1.1 азимут цели ц– угол между северным направлением и
проекцией
направления
на
цель
в
горизонтальной
плоскости,
отсчитываемой по часовой стрелке. Угол места цели ц равен углу между
направлением на цель и горизонтальной плоскостью, проходящей через
точку стояния РЛС. В зависимости от решаемой задачи и места установки
РЛС
используют
и
другие
угловые
координаты.
Иногда
удобно
отсчитывать углы относительно нормали к раскрыву антенны в двух
взаимно ортогональных плоскостях и т.д.
Классификация
состоит
в
установлении
принадлежности
наблюдаемой цели к одному из заранее определенных классов и (или)
типов. Классификация типов целей радиотехническими средствами часто
вызывает затруднение. Поэтому отдельные типы целей объединяют в
классы. Например, в класс “бомбардировщиков” можно отнести цели типа
B-52, Ту–160 и др, а класс “истребителей” объединяет цели типа МиГ–35,
20
Су–35 и др. Классификация целей при этом сводится к определению их
классов. При классификации также можно выделить другие классы: “свой
– чужой”, “самолет – ракета”, “истинный – ложный”, “винтовой –
турбореактивный” и др. Класс “свой – чужой” используют при
определении государственной принадлежности цели с помощью активных
запросно-ответных радиолокационных систем опознавания. Свои цели
выдают ответ на соответствующий кодированный запросный сигнал, а
чужие не отвечают.
Таким образом, классификация включает в себя опознавание и
распознавание
целей,
но
эти
задачи
классификации
являются
обособленными, и выходят за рамки данного учебника.
1.2.
Виды радиолокации
Носителями радиолокационной информации являются принимаемые
от целей сигналы. Эти сигналы могут формироваться за счет:
1. Вторичного излучения радиоволн целями под воздействием их
первичного облучения;
2. Переизлучения ответчиками, установленными на целях, принятых
радиоволн;
3. Собственного излучения радиоволн целями.
В
зависимости
радиосигнала
от
различают
характера
виды
образования
активной
принимаемого
радиолокации
(активной
радиолокации с пассивным ответом), радиолокации с активным ответом
(активной радиолокации с активным ответом) и пассивной радиолокации.
В активной радиолокации (иначе, в активной радиолокации с
пассивным ответом)принимаемые сигналы образуются в результате
вторичного излучения (отражения) целями радиоволн (пассивный ответ),
которые излучаются РЛС. Активный характер радиолокации выражается в
необходимости использования излучения РЛС. Упрощенный состав такой
21
РЛС приведен на Рис. 1.2 а. Радиопередающее устройство формирует
мощные высокочастотные колебания, которые через передающую антенну
Ап излучаются в направлении цели. Излученные колебания (зондирующий
сигнал), достигнув цели, отражаются от нее. Часть энергии отраженного
сигнала принимается антенной Апр и поступает в радиоприемное
устройство для анализа и извлечения информации.
В
последнее
время
все
большее
распространение
получают
радиолокаторы, которые используют не собственные зондирующие
сигналы, а сигналы других независимых источников: телевизионных,
радио, Wi-Fi и тд. Их сигналы практически постоянно «подсвечивают»
цели, а принятые сигналы являются источниками полезной информации
после соответствующей обработки.
Рис. 1.2. Виды радиолокации
При расположении приемной позиции в непосредственной близости
от передающей, радиолокационное средство называется однопозиционным
или совмещенным (Рис. 1.2 а). Если приемный пункт отнесен от
передатчика на некоторую базу Б (Рис. 1.2 б, в), то радиолокационное
средство называется разнесенным. База Б может быть постоянной (Рис. 1.2
22
б) и переменной (Рис. 1.2 в). В последнем случае, например, передатчик с
антенной Ап устанавливают на земле, а приемник с антенной Апр – на
зенитной управляемой ракете (Рис. 1.2 в).
Радиолокационная система может включать несколько разнесенных
в пространстве передающих, приемных или приемопередающих позиций.
Такую систему называют многопозиционной.
В
радиолокации
с
активным
ответом
(или
во
вторичной
радиолокации), в отличие от активной радиолокации с пассивным ответом,
на цели устанавливается ответчик, т.е. приемо-передающее устройство,
которое принимает излученный (запросный) сигнал, формирует ответный
сигнал и излучает его (активный ответ) в направлении запросчика (Рис. 1.2
г).
При
этом
заметно
радиолокационных
используется,
целей
(см.
например,
принадлежности
целей
повышается
п.
4.5).
для
“свой
–
дальность
Такой
вид
определения
чужой”.
“Свои”
наблюдения
радиолокации
государственной
цели
выдают
кодированный ответ на соответствующий кодированный запросный
сигнал, а “чужие” “молчат”, так как не могут раскодировать запрос.
Кроме того, путем видоизменения ответов можно обеспечить не
только
опознавание
целей,
но
и
получить
дополнительную
информацию: высоту полета, запас горючего, бортовой номер и др.
Пассивная радиолокация использует собственное радиоизлучение
целей (Рис. 1.2 д). Такие излучения создаются, например, станциями
радиопомех, навигационными и связными средствами на борту. Прием
радиоволн может осуществляться одним (Рис. 1.2 д) или несколькими
разнесенными приемными устройствами.
Собственные излучения целей, например, создаются в инфракрасном
диапазоне частот ионизированными образованиями в окрестности цели и
нагретыми
участками
поверхности
цели.
Так,
самолеты
с
турбореактивными двигателями излучают за счет нагрева деталей их
23
двигателей до 500…1000 градусов Кельвина. Самолеты с поршневыми
двигателями излучают в основном за счет нагрева выхлопных патрубков, а
также углеродных частиц выхлопных газов. Учитывая тепловой характер
возникновения собственных излучений, используют понятие “пассивная
радиотеплолокация”.
Радиолокационные системы, которые в процессе функционирования
используют методы как активной, так и пассивной радиолокации относят
к активно-пассивным радиолокационным системам.
Отметим, что излагаемые в данном учебнике теоретические
принципы применимы к любым радиолокационным системам, но в
основном подразумевают применение в активных однопозиционных
радиолокационных средствах.
1.3.
Основные тактико-технические характеристики РЛС и
оптимизация их реализации
Характеристики
РЛС
обычно
разделяют
на
тактические
и
технические, которые в совокупности образуют тактико-технические
характеристиками (ТТХ).
Тактическими называют характеристики РЛС, которые определяют
их функциональные возможности при практическом, в том числе военном,
применении. К тактическим характеристикам РЛС относятся: дальность
действия, зона видимости, время обзора, вид и точность измеряемых
координат и параметров движения цели, разрешающая способность,
помехозащищенность,
определения
этих
пропускная
способность.
характеристик,
которые
Приведем
обычно
общие
уточняются
применительно к конкретным типам РЛС.
Дальность действия РЛС – это максимальное расстояние Rmax до
цели с заданной эффективной площадью, на котором обеспечивается
решение той или иной информационной задачи (обнаружения, разрешения,
24
измерения,
классификации)
с
заданными
показателями
качества.
Дальность действия для решения разных задач, в общем случае различна.
Иногда дальность действия системы ограничивают и со стороны
минимального значения Rmin.
Зона видимости РЛС – область пространства, в пределах которой
цель с заданной ЭПР наблюдается радиолокатором с показателями
качества не ниже заданных. Заданные показатели качества наблюдения
цели
также
являются
тактическими
характеристиками.
Если
под
наблюдением понимается обнаружение цели, то в пределах зоны
видимости (обнаружения) показатели качества обнаружения должны быть
не ниже заданных. Если наблюдение состоит в точном измерении
координат цели РЛС, то размеры зоны видимости (измерения) определяют
исходя из допустимых значений погрешностей измерений. Зона видимости
обычно задается дальностью действия и границами зоны обзора (поиска)
по азимуту и углу места.
Время обзора– время, необходимое для однократного обзора
заданной зоны видимости РЛС. Выбор времени обзора зависит от скорости
перемещения цели и её маневренности. Чем они выше, тем меньше
требуемое время обзора. Некоторые РЛС специального назначения
функционируют по данным целеуказаний, и обзор производят в
сравнительно узком секторе. Поэтому вместо времени обзора пользуются
понятием время поиска и обнаружения цели.
Разрешающая способность РЛС влияет на полноту сведений о
наблюдаемой обстановке при наличии большого числа целей. Если под
разрешением понимается возможность раздельного наблюдения двух
одинаковых целей, то разрешающую способность РЛС по данному
параметру (дальности, скорости и т.д.) определяют минимальным
интервалом (по дальности, скорости и т.д.), при котором сигналы на
25
выходе приемника перекрываются на некотором уровне, например,
половинной мощности (критерий Рэлея).
Более обоснованный критерий разрешающей способности РЛС по
выбранному параметру определяется минимальным интервалом между
целями, при котором наличие одной цели не мешает обнаруживать вторую
цель и измерять ее координаты с заданными показателями качества.
Требование к точности измерений зависит от назначения системы.
Неоправданное завышение требований к точности приводит к усложнению
системы,
снижению
её
экономичности,
а
иногда
и
надежности
функционирования.
Вид, число и точность измеряемых параметров цели определяет
возможности практического использования РЛС. Так, для определения
местоположения наземных и надводных целей достаточно измерить только
две координаты (дальность и азимут), а при наблюдении за воздушными
целями часто требуется измерение трех координат (дальность, азимут, угол
места). При управлении беспилотными объектами, помимо координат
цели, в ряде случаев необходимо измерять и скорость изменения
координат.
Помехозащищенность
РЛС
–
способность
решения
информационных задач с заданным качеством в условиях воздействия
непреднамеренных и организованных радиопомех.
Пропускная
способность
РЛС
характеризуется
количеством
объектов, обслуживаемых одновременно или в единицу времени. Она
зависит от многих факторов, в том числе от назначения и построения
системы, размеров зоны видимости, разрешающей способности и т.д.
К техническим характеристикам РЛС относятся параметры, которые
обеспечивают
выполнение
тактических
характеристик.
техническими характеристиками РЛС являются:
26
Основными
– рабочая частота, стабильность частоты, мощность (энергия), вид
модуляции, длительность и ширина спектра излучаемых сигналов;
–
характеристики
антенны
(размер,
коэффициент
усиления,
эффективная площадь, ширина ДН, уровень боковых лепестков);
– чувствительность и полоса пропускания приемного устройства;
– вид и параметры устройств отображения и съема информации.
Отметим, что одни и те же ТТХ могут обеспечиваться при различных
сочетаниях технических характеристик. Например, большую дальность
действия РЛС можно обеспечить увеличением либо мощности излучения,
либо эффективной площади антенны и т.д. В процессе эксплуатации РЛС
требуемые ТТХ реализуются поддержанием её технических характеристик
в пределах заданных допусков. Научно-техническая задача создания РЛС
состоит в том, чтобы найти наиболее экономичное оптимальное решение.
Оптимальное
решение
должно
обеспечивать
наилучшее
в
определенном смысле качество решения радиолокационных задач. При
этом должны быть выбраны критерий оптимальности и показатели
качества, т.е. количественная мера качественному понятию “наилучшее”.
Выбор критерия оптимальности непосредственно связан с характером
задач, которые решаются той или иной системой (устройством) обработки.
Так, в зависимости от назначения и режима функционирования РЛС задача
оптимизации может заключаться: в минимизации вероятностей ошибок
обнаружения цели (сигнала), в минимизации ошибок измерения координат
цели,
в
улучшении
разрешающей
способности,
в
минимизации
энергетических затрат при решении тех или иных задач без ухудшения
тактических характеристик системы, или в минимизации времени поиска
целей и т.д. На всех этапах развития радиолокации решение задач
оптимизации происходило на основе обобщения накопленного опыта,
использования новых достижений теории и ее практических приложений.
27
Отметим особенности решения перечисленных задач на современном
этапе развития теории и техники радиолокации. Практически до конца ХХ
века технология создания РЛС базировалась на аналоговой технике. При
этом радиолокационная наука развивалась опережающими темпами. На
основе
аналоговой
техники
известные
из
теории
алгоритмы,
оптимизирующие решение задач радиолокационного наблюдения, часто не
могли быть реализованы на практике.
В
последние
технологическая
десятилетия
ситуация,
возникла
связанная
с
принципиально
ускоренным
новая
развитием
вычислительных средств. В этих условиях простой перевод традиционных
алгоритмов обработки радиолокационной информации из аналоговой в
цифровую
реализацию
представляется
неэффективным.
Наличие
высокопроизводительной цифровой элементной базы открывает широкие
возможности для приближения к известным из теории оптимальным
методам получения радиолокационной информации.
Каждая из перечисленных задач, как и одна и та же задача в
различных радиолокационных системах, имеет свои особенности. Однако
при решении всех задач является общим и неизбежным учет наличия
флюктуационных шумов и случайных помех, что придает процедуре
оптимизации статистический характер. Различные задачи, близкие по
методике оптимизации, часто решаются с использованием алгоритмов,
которые имеют совпадающие элементы. Эти унифицированные устройства
(части системы) обработки сигналов могут использоваться в РЛС
различного назначения.
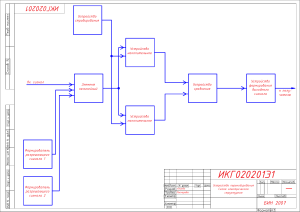
Для
оптимизации
различных
радиолокационных
характерными являются процедуры, показанные на Рис. 1.3.
28
систем
Потенциальные показатели
качества
Показатели качества
и критерий
оптимальности
Вероятностные
Модели
сигналов
расчеты
Алгоритмы и структурные
схемы оптимальных решений
Квазиоптимальные алгоритмы
и структурные схемы решений
Модели помех
Реальные показатели качества
Рис. 1.3. К пояснению оптимизации
Поясним содержание каждой составляющей на этом рисунке.
1. Постановка задачи (цели) оптимизации РЛС или РТС в
зависимости
от
ее
назначения.
Например,
цель
оптимизации
–
обнаружение сигнала.
2. После уточнения цели оптимизации необходимо выбрать
показатели качества и приемлемый (разумный) критерий оптимизации
(эффективности) решаемой задачи, например, вероятность правильного
обнаружения.
3. Введение моделей сигналов и помех различной степени общности.
4. В соответствии с выбранными показателями качества, критерием
оптимальности и моделями сигналов и помех необходимо выполнить
вероятностные расчеты и получить оптимальное решающее правило,
которое
определяет
последовательность
алгоритм
функционирования
преобразований
наблюдаемых
системы,
т.е.
данных
для
статистического решения задачи.
5.
По
полученному
алгоритму
необходимо
синтезировать
структуру системы, проанализировать возможности ее практической
реализации и оценить показатели качества оптимальной системы
(потенциальные показатели системы).
29
6. Оптимальная структура устройства может оказаться трудно
технически реализуемой. Поэтому возникает необходимость ее упрощения
и поиска упрощенных (квазиоптимальных) алгоритмов и схем, которые
имели бы показатели, близкие к показателям оптимальной системы.
Решение
задач
статистической
оптимизации
невозможно
без
понимания физических основ извлечения информации из принятых
сигналов.
1.4.
Принципы получения информации о координатах целей
1.4.1. Физические основы получения информации в активных
РЛС и их построение.
Прежде, чем рассмотреть вопросы получения радиолокационной
информации, следует оговорить, что цели (сигналы) уже обнаружены. Это
означает, что их энергия была достаточна для превышения порога
обнаружения на фоне шумов и помех.
Носителями информации о целях являются отраженные от них
сигналы. В параметрах этих сигналов (времени запаздывания, частоте и
пространственной фазе) содержится информация о цели (дальности,
скорости и угловых координатах). Можно считать, что, параметры
принимаемых сигналов характеризуют состояние радиолокационной цели.
Определение состояния цели по параметрам принимаемых сигналов
основывается на следующих свойствах распространения радиоволн (РВ):
отражении РВ от неоднородностей среды;
прямолинейности и постоянстве скорости распространения РВ в
однородной среде;
возникновении отличий в частотах излучаемых и принимаемых
колебаний при сближении цели с РЛС и удалении цели от РЛС
(эффект Доплера).
30
Из
особенностей
отражения
РВ
от
целей
при
различных
соотношениях размеров цели и длины волны облучаемых колебаний
следует, что для наблюдения целей типа самолет, ракета и т.д.
целесообразно использовать диапазон метровых и более коротких волн. В
активной радиолокации различного назначения используются: VHF, L, S,
C и X диапазоны РВ, реже 𝐾 – диапазон (международная классификация
(см. подраздел 2.7). Из-за прямолинейности распространения волн этих
диапазонов получение информации о целях возможно, если они находятся
в пределах прямой видимости (см. раздел 2), т.е. над горизонтом
(надгоризонтная радиолокация).
В
процессе
формирования,
излучения,
обзора
пространства,
отражения от цели и приема параметры сигнала – носителя информации
могут подвергаться модуляции (изменению) по времени и по пространству.
Соответственно
выделяют
временную,
пространственную
и
пространственно-временную модуляцию сигналов.
Под
временной
модуляцией
понимают
изменения
параметров
(амплитуды, фазы, частоты) сигнала во времени. Пространственная
модуляция – это изменения параметров (амплитуды, фазы) поля (сигнала)
на апертуре антенны (по пространству). Совокупность пространственной и
временной модуляции определяет понятие пространственно-временной
модуляции.
Закон
временной
модуляции
и
параметры
зондирующих
(излучаемых) сигналов в радиопередатчике выбираются на основе
требований к дальности действия, точности измерений, разрешающей
способности и помехозащищенности РЛС. К разновидностям временной
модуляции в РПУ относятся:
амплитудная импульсная, когда колебание модулируется по
амплитуде импульсной последовательностью;
31
импульсная
с
внутриимпульсной
частотной
модуляцией
(манипуляцией);
импульсная с внутриимпульсной фазовой манипуляцией;
частотная модуляция или фазовая манипуляция непрерывных
сигналов и т.д.
Зондирующий
(излучаемый)
импульсный
сигнал
(ЗС)
с
произвольным законом временной модуляции, как правило, представляет
собой узкополосное колебание сверхвысоких частот (СВЧ), когда ширина
его спектра ∆𝑓и значительно меньше центральной несущей частоты f0
( f u f 0 ) . Если это условие не выполняется, то несущая частота f0 не
«успевает» за воспроизведением закона модуляции, и сигнал уже не
является радиочастотным. Высокочастотный узкополосный сигнал в
общем случае может быть представлен выражением
u (t ) B зс U (t ) cos[ 2f 0 t (t )] Re U (t ) e j 2f 0t
(1.1)
где U(t) и (t ) – описывают соответственно законы амплитудной и
фазовой модуляции, U (t ) U (t ) e j (t ) – комплексная амплитуда сигнала, Bзс амплитудный множитель ЗС.
Сигнал u(t ) и его спектральная плотность g ( f ) связаны друг с другом
парой преобразований Фурье:
g ( f )
u (t ) e
j 2 ft
dt ,
(1.2)
u (t ) 1 / 2
g ( f ) e
j 2ft
df .
(1.3)
Описание наиболее распространенных сигналов РЛС во временной и
частотной областях при использовании различных видов их временной
модуляции приведено в Приложении 1.
На характер пространственно-временной модуляции сигнала наряду
с его временной модуляцией в передатчике существенно влияет закон
изменения во времени ориентации и параметров антенны. Ниже будут
32
рассмотрены различные виды пространственно-временной модуляции,
используемой для получения информации в РЛС.
При любом виде модуляции принимаемого сигнала возможность его
наблюдения и извлечения информации на фоне помех определяется его
энергией (мощностью), которая во многом зависит от энергии излученного
сигнала – первичного поля. Кратко напомним важнейшие энергетические
характеристики импульсных сигналов.
1. Мгновенная мощность P(t)
– текущее значение мощности
излучения, усредненное лишь за период высокой частоты. Наибольшую
мгновенную мощность Pпик называют пиковой. Последняя, в свою очередь,
определяется с учетом электрической прочности высокочастотного тракта
передатчика. Полагая, что мощность P(t) выделяется на сопротивлении в
1 Ом, а действующее значение амплитуды сигнала (1.1) с огибающей
Вз U (t ) в пределах каждого периода СВЧ колебания равно U д В зc U (t ) / 2 ,
имеем:
P ( t ) ( В зc U ( t ) / 2 ) 2 В зc2 U 2 ( t ) 2 .
2. Импульсная мощность Pи – мощность, усредненная за время
длительности импульса u :
Pи
1
и
и
P (t ) dt P
пик
.
(1.4)
0
Для импульсов прямоугольной формы значения импульсной Pи и
пиковой Pпик мощностей совпадают. При другой форме импульса 𝑃 ,
естественно, ниже.
3. Энергия импульсного сигнала
и
Э и P (t ) dt .
(1.5)
0
33
В частности, для прямоугольного радиоимпульса: Эи Pи и . При
увеличении длительности импульса u пропорционально увеличивается
энергия сигнала Э u .
4. Средняя мощность Pср – мощность, усредненная за период
следования импульсов
T
:
𝑃ср
Эи /𝑇
(1.6)
Для прямоугольных импульсов 𝑃ср
𝑃и 𝜏и /𝑇
𝑃и /𝜂,где 𝜂
𝑇/𝜏и –
скважность импульсов, зависящая в частности от вида и возможностей
РПУ.
На практике скважность импульсов 𝜂 часто велика, а поэтому
значения средних мощностей существенно меньше импульсных (в первую
очередь это относится к передатчикам на вакуумных приборах, для
которых обычно 𝜂
100).
Заметим, что принцип работы РЛС на этапе обнаружения важно
рассматривать в статистической постановке. Это объясняется тем, что в
отсутствие шумов и помех задача обнаружения теряет физический смысл,
так как при любой сколь угодно малой энергии принятого сигнала, он
всегда
превысит
вероятностью.
порог
Подробно
обнаружения
статистическая
со
сколь
теория
угодно
высокой
одноканального
и
многоканального обнаружении изложена в разделах 3 и 5 соответственно.
Перейдем к изложению основных принципов получения информации
об
обнаруженных
целях.
В
данном
разделе
ограничимся
лишь
физическими основами решения этой задачи, широко используемыми на
практике. Прежде, чем перейти к описанию методов извлечения
информации
из
сигналов,
отраженных
от
целей
(эхо-сигналов),
рассмотрим построение типовой активной РЛС и назначение ее составных
частей. Обобщенная структурная схема такого импульсного совмещенного
радиолокатора показана на Рис. 1.4. Его основными элементами являются:
приемопередающая
антенна,
радиопередающее
34
устройство
(РПУ),
радиоприемное устройство (РПрУ), устройства первичной и вторичной
обработки,
а
также
ВЧ
тракт,
формирователь,
синхронизатор
и
индикаторное устройство (ИУ).
Формирователь
и
модулятор
«запускаются»
импульсом
синхронизации 𝜐синх 𝑡 , связанным с началом дистанции РЛС. Работа
модулятора определяет длительность ЗС 𝜏и и период повторения Т, а
формирователь – закон внутриимпульсной модуляции каждого импульса.
Сформированная последовательность радиоимпульсов через антенный
переключатель (АП) поступает в антенну и за время длительности ЗС
излучается в пространство.
Сразу после излучения АП подключает антенну ко входу ВЧ тракта
(волноводному или фидерному) приемника, куда приходит эхо-сигнал. На
входе РПрУ, как правило, устанавливается малошумящий усилитель
(МШУ), компенсирующий последующие потери принятого сигнала. Далее
смеситель переводит высокую несущую частоту 𝑓 на более низкую
промежуточную 𝑓пр . Для этого на его вход от формирователя подается
сигнал гетеродина 𝜐гет 𝑡
на частоте 𝑓гет
𝑓
𝑓пр . После усилителя
промежуточной частоты УПЧ и квадратурного детектирования принятый
сигнал оцифровывается аналого-цифровым преобразователем (АЦП).
Заметим, что в современных РЛС оцифровка сигнала все чаще переносится
на более высокую частоту 𝑓пр ,и формирование квадратур сигнала
осуществляется уже в цифровом виде (необходимость квадратурной
обработки обосновывается в разделе 3).
На этапе первичной обработки эхо-сигналов чаще всего реализуются:
внутрипериодная обработка (демодуляция импульсов) и междупериодная
обработка (накопление пачек импульсов), а также установка порогов
обнаружения.
Обнаруженные
отметки
с
идентифицированными
координатами отображаются на экране индикаторных устройств. В
современных РЛС роль ИУ выполняют компьютерные мониторы, на
35
которых удобно отображать радиолокационную обстановку. Трассы
воздушных объектов рассчитывает устройство вторичной обработки по
координатам отметок, превысивших порог обнаружения. Для этого,
помимо сигналов Z(t) с выхода первичной обработки также используются
информация об угловом положении антенны от датчиков привода
вращения. Вышеописанное построение РЛС можно считать достаточно
универсальным, так как независимо от назначения и технических решений
в элементах, такое построение позволяет получать информацию о
координатах целей и складывающейся воздушной обстановке.
𝜏и , 𝑇
ВУ
усилитель
𝑓0
РПУ
ВЧ тракт
𝜐синх 𝑡
Антенна
АП
Первичное
питание
Модулятор
𝜐синх 𝑡
Формирователь
Синхронизатор
𝜐синх 𝑡
𝑓тет 𝜐тет 𝑡
ВЧ тракт
Привод
вращения
𝑓пр
МШУ
Смеситель
РПрУ
УПЧ
квадратурный
детектор
АЦП
Привод
вращения
Антенная
система
𝑘ед угла
𝑍 𝑡
Устр‐во
первичной
обработки
Координаты
Оператор
ИУ
(дисплей)
Трассы
Устр‐во
вторичной
обработки
𝜐разв 𝑡
Рис. 1.4. Структурная схема совмещенного импульсного радиолокатора
36
1.4.2. Принципы определения дальности до целей.
Предположим, что в процессе излучения зондирующих импульсов
диаграмма направленности антенны не перемещается и цель находится в
пределах ее главного лепестка. Среда распространения радиоволны “РЛС
– цель – РЛС” представляет однородное свободное пространство.
T
U синх (t )
Зондирующие u
сигналы
u (t )
t
Z (t )
t
Rц
U разв (t )
Отраженный сигнал
U разв (t )
t
Рис. 1.5. К пояснению принципа действия импульсного радиолокатора
Вследствие
прямолинейности
и
постоянства
распространения РВ (c 3 10 8 м/с ) в этой среде
отраженного
сигнала
относительно
скорости
время запаздывания t з
момента
излучения
(Рис.
1.5)
однозначно связано с дальностью до цели R ц :
𝑡з
или
𝑅ц м
с
учетом
2𝑅ц /𝑐,
реальных
150𝑡з мкс , или 𝑅ц км
с
𝑅ц
для
𝑡з
РЛС
(1.7)
временных
интервалов
150𝑡з мс
Например, если время запаздывания отраженного сигнала t з 2 мс, то
дальность до цели 𝑅ц
300 км.
Часто в качестве ИУ используется электронно-лучевая трубка. На ее
вертикально-отклоняющие
пластины
подают
продетектированные
отраженные сигналы (t) с выхода приемника, а на горизонтальные
37
отклоняющие пластины – периодическое пилообразное напряжение
развертки U разв (t ) (Рис. 1.5).
Период
повторения
зондирующих
импульсов
T
чаще
всего
выбирают из условия однозначного измерения дальности:
T t з max 2 Rц max / c ,
(1.8)
где R ц max – максимальная дальность наблюдения цели.
Соотношение 1.8 показывает, что для однозначного измерения
дальности каждый последующий импульс не может быть излучен ранее,
чем придет предыдущий импульс, отраженный от цели на дальности Rmax .
В противном случае нельзя указать, от какой цели пришел этот эхо-сигнал:
от «дальней» цели по первому импульсу, или от «ближней» цели по
второму. Интервал неоднозначности по дальности равен Rц cT / 2 . На Рис.
1.5 условие 1.8 выполняется, а на Рис. 1.6 нет. Действительно, отраженный
сигнал с запаздыванием t з T наблюдается на следующем ходу развертки с
запаздыванием t з1 t з . Отметим, что невыполнение условия (1.8) приводит
к необходимости предусмотреть специальные меры для устранения
неоднозначности.
Зондирующие
сигналы
Отраженный
сигнал
u(t)
t
t32
t31 > T
Рис. 1.6. К неоднозначности дальности
Итак
при
периодическом
характеризует период повторения
зондировании
T
выражение
и частоту повторения
(1.8)
F 1/T
импульсов, которые обеспечивают однозначность измерения дальности.
38
1.4.3. Принцип определения радиальной скорости целей.
Измерения радиальной скорости цели Vr основаны на использовании
эффекта Доплера. Упрощенно его можно пояснить следующим образом.
Если совмещенная РЛС и цель неподвижны, а цель облучается
гармоническим колебанием, то частоты зондирующего сигнала f0 и
отраженного сигнала на входе приемника f отр одинаковы.
При движении цели, имеющей одну блестящую точку, с постоянной
радиальной скоростью Vr приемник принимает колебания с частотой
f отр f 0 Fд ,
которая отличается от f0 на величину доплеровской частоты
(доплеровской добавки частоты), которая равна Fд 2Vr / 0 , где 0 - длина
волны сигнала.
Физически эффект Доплера является следствием релятивистской
трансформации масштаба времени для тела, движущегося с радиальной
скоростью 𝑉 . При наблюдении такого объекта масштаб времени
определяется преобразованием Лоренца
𝑡
1
1
𝑉 /𝑐
𝑡
𝑉 /𝑐
1
2𝑉
𝑡 при 𝑉 ≪ 𝑐
𝑐
(1.9)
Представление времени как функции относительной скорости 𝑡
𝑓 𝑉 /𝑐 непривычно и затрудняет понимание процессов. В то же время в
радиотехнике и радиолокации широко пользуются понятием «фаза»,
которая, как правило, линейно зависит и от частоты, и от времени: 𝜑
𝑓 𝑡.
Поэтому вместо понятия «доплеровского сдвига времени» полагают
переменным
значение
частоты
колебаний,
«доплеровский сдвиг частоты» на величину: 𝐹д
т.е.
2𝑉 𝑓 /𝑐
вводят
понятие
2𝑉 /𝜆 ;
При удалении/приближении цели относительно РЛС значение 𝑓отр
соответственно уменьшается/увеличивается по сравнению с 𝑓 . Поэтому
значение F д берется со знаком “”, когда цель удаляется от РЛС и со
39
знаком “”, когда цель приближается к РЛС. Измерив F д , можно
определить радиальную скорость цели
Vr
0
2
(1.10)
Fд
Таким образом, движение цели с постоянной радиальной скоростью
Vr приводит к изменению частоты принимаемого сигнала относительно
зондирующего на величину F д . Определение радиальной скорости Vr
сводится к измерению доплеровской поправки частоты F д принимаемого
сигнала.
В однопозиционной РЛС, когда РПУ и РПрУ размещаются на одной
позиции (одном объекте), в качестве опорного колебания, относительно
частоты
которого
измеряется
доплеровская
поправка
частоты
принимаемого сигнала, используется сигнал РПУ пониженной мощности
(Рис. 1.7 а).
Пусть РПУ формирует ВЧ немодулированное колебание с частотой
f0
(Рис. 1.7 б), которое через антенну излучается в направлении
движущейся цели (с одной блестящей точкой). Если цель приближается к
РЛС с радиальной скоростью Vr , то отраженный от неё сигнал с частотой
f 0 Fд (Рис. 1.7 в) поступает на вход смесителя (СМ) РПрУ. На другой вход
СМ поступает сигнал РПУ пониженной мощности. На выходе СМ
выделяется сигнал на частоте F д , который через усилитель поступает на
частотомер.
РПУ
б
Цель
f0
в
а
СМ
f
f 0 + FД
Zc1(f)
Усилитель
f
1⁄𝜏и
Zc2(f)
г
Частотомер
∆𝐹
Рис. 1.7. Структурная схема измерения радиальной скорости
40
f
Прямой частотный метод измерения радиальной скорости не нашел
практического применения в РЛС СВЧ диапазонов. Эта задача является
трудно решаемой с достаточной точностью в связи с тем, что 𝑓 ≫ 𝐹д . Она
сводится к выделению допплеровской частоты в диапазоне от десятков Гц
до нескольких кГц на фоне несущей частоты 𝑓 в несколько ГГц и более.
Для определения 𝑉 в РЛС, как правило, используется когерентная Мэлементная пачка импульсов. При постоянном периоде повторения 𝑇 ее
спектр показан на Рис. 1.8. Разность фаз между смежными импульсами,
обусловленная скоростью цели 𝑉 , равна
2𝜋𝐹д 𝑇
∆𝜑
4𝜋𝑉 𝑇 /𝜆
(1.11)
и линейно нарастает пропорционально номеру импульса. Из (1.11)
следует:𝑉
Δ𝜑𝜆 /4𝜋𝑇, т.е. по измеренному значению Δ𝜑 можно дать
оценку значению скорости 𝑉 . Однако, если Δ𝜑
2𝜋𝑛 𝑛
1,2,3 … , то
𝑛𝜆 /2𝑇, будут определены данным методом
скорости, равные 𝑉
0. К этому же выводу можно прийти, если
измерения как нулевые 𝑉
полагать, что за период повторения импульсов цель пролетает расстояние,
кратное половине длины волны: 𝑉 𝑇
𝑛𝜆 /2. Именно в этом случае,
согласно (1.11) разность фаз между смежными импульсами составит Δ𝜑
2𝜋𝑛. В системах СДЦ (см. раздел 5.9) скорость цели, удовлетворяющая
этому условию, получила название «с л е п а я ». Согласно рис (1.9) для
однозначного измерения 𝑉
1/𝑇
2𝑉
следует потребовать
𝜆 ⁄2𝑉
/𝜆 или 𝑇
При заданном значении 𝑉
(1.12)
, весь возможный диапазон измерения
частоты Доплера не должен превышать так называемую частоту
Найквиста 𝐹дн
Ситуации,
когда
, которая определяется выбором периода 𝑇.
частота
Доплера
(скорость
цели)
определяется
однозначно и неоднозначно, иллюстрируют Рис. 1.8 б и 1.8 в)
соответственно.
41
ΔF
а
1|T
неподвижная цель
(Vr = 0)
f
f0
однозначное
измерение скорости
б
FД
в
f0 + FД
f
неоднозначное
измерение скорости
FД1
f
FД
Рис. 1.8. Спектры когерентной последовательности импульсов
Условие (1.12) ограничивает период повторения импульсов сверху.
Оно может прийти в противоречие с условием (1.8), накладывающем
ограничение на 𝑇 снизу. Например, от РЛС требуется: 𝑅
75 км и 𝑉
100 м/𝑐 при 𝜆
5 ∙ 10
дальности необходимо иметь: 𝑇
м. Для однозначного измерения
2 ∙ 75 ∙ 10 /3 ∙ 10
500 мкс, а для
однозначного измерения скорости следует потребовать: 𝑇
10
250 мкс.
пересечения.
Между
В
таких
этими
условиями
ситуациях
обычно
нельзя
отдают
5 ∙ 10 /2 ∙
найти
область
предпочтение
возможности однозначного измерения одного из параметров цели: либо
дальности (𝑅ц ), либо скорости (𝑉 ), а неоднозначность по другому
параметру «расшивают» в процессе дальнейшего наблюдения.
1.4.4. Принцип определения угловых координат целей при
пространственно-временной модуляции сигналов.
В однопозиционных РЛС сигналы могут модулироваться за счет
изменения ориентации диаграммы направленности (ДН) или параметров
антенны (на прием и/или передачу). Такой вид модуляции является
пространственным.
Совокупность
пространственной
и
временной
модуляций охватывают понятием пространственно-временная модуляция.
42
Закономерности
пространственно-временной
модуляции
и
распространения РВ позволяет определить угловые координаты целей.
Простой способ пространственно-временной модуляции сигналов
реализуется
при
круговом
обзоре
пространства
путем
вращения
остронаправленной по азимуту антенны с постоянной угловой скоростью
nA
оборотов в минуту или A 6nA [град/с]. При этом диаграммы
направленности антенны по полю на передачу F1 ( ) и на прием F2 ( )
синхронно
вращаются.
Для
совмещенной
РЛС
с
одной
приемо-
передающей антенной имеем F1 ( ) F2 ( ) F ( ) . Направление максимума
F( ) совмещается с геометрической осью вращающейся антенны. Однако
при вращении антенны за время распространения сигнала до цели и
обратно (𝑡з ) приемная ДН F2 ( ) смещается относительно передающей F1( )
на угол cм (Рис. 1.9 а). Величина cм зависит от угловой скорости вращения
А антенны (ДН) и дальности до цели R ц :
см A t з A
2Rц
c
.
Например, если в РЛС n A 6 об/мин, ширина ДН равна A 1,8 и
цель находится на дальности R ц 150 км, то t з 10 3 с , а см 6 n A 10 3 0,018
. Эта величина угла смещения см мала по сравнению с шириной ДН
( A 1,8 ). Поэтому ее можно не учитывать и считать, что вращается одна
результирующая ДН (Рис. 1.9 б)
F р ( ) F1 ( ) F2 ( ) F 2 ( ),
которая сужена
по сравнению с шириной ДН F( ) на передачу или прием A примерно в
2 1,4 раза,
т.е. р A / 2.
В течение времени, пока результирующая ДН антенны пересекает
направление на цель, отраженные от неё сигналы поступают на вход
приемника.
Если
цель
облучается
немодулированным
(гармоническим)
колебанием и ее эффективная площадь ц не меняется за время облучения
43
t обл , то закон амплитудной модуляции отраженного сигнала на входе (Рис.
1.9 в) и на выходе (Рис. 1.9 г) приемника после детектирования
определяется
только
формой
результирующей
ДН
F р ( ) приемо-
передающей антенны и скоростью обзора (см. раздел 2).
Если цель облучается последовательностью (пачкой) импульсов с
периодом повторения 𝑇, а за время облучения 𝑡обл ≫ 𝑇 эффективность
отражений от цели остается постоянной, то закон амплитудной модуляции
эхо-сигнала после детектирования также зависит только результирующей
ДН
𝐹р 𝛽
и
скорости
обзора.
Такая
М-элементная
пачка,
промодулированная ДН, будет иметь вид, показанный на Рис. 1.9 д. При
этом
количество
импульсов
в
пачке,
определяемое
шириной
результирующей ДН Δ𝛽р равно
Например, при Δ𝛽
Δ𝛽
6𝑛 𝑇
𝑡обл
𝑇
𝑀
1,8°/√2
(1.13)
1,28°, 𝑇
10 с, 𝑛
6 об/мин из
35 мс.
(1.13) получим: M = 36, а длительность пачки составит 𝑡п
F1
F2
в
Fp
а
t
0
cм
г
0
Fp
ц
б
д
Цель
0
tˆц
п
t
t
tˆц
Ц1
е
A
РЛС
Ц2
Рис. 1.9. Одноканальное измерение угловой координаты
Таким
образом,
при
последовательном
механическом
обзоре
максимум огибающей сигнала на выходе приемника формируется в момент
44
времени t ц , когда направление максимума F р ( ) совпадает с направлением
на цель. Измерение угловой координаты при последовательном обзоре
пространства сводится к измерению времени запаздывания tˆц огибающей
сигнала (Рис. 1.9 г) относительно некоторого начального момента времени
t 0,
соответствующего 0 , т.е.
ˆц A tˆц .
(1.14)
Для наблюдения принятых импульсных сигналов и определения
дальности и угловой координаты цели используют индикаторы кругового
обзора (ИКО) с яркостной отметкой (Рис. 1.9 е). Электронный луч
подвергают при этом развертыванию –радиальному и азимутальному.
Радиальное развертывание из центра к периферии трубки производят в
направлении
текущего
азимутального
положения
оси
диаграммы
направленности антенны. Положение радиуса дужки относительно
центра экрана определяет дальность, а её центр относительно северного
направления – азимут цели.
В ряде РЛС осуществляется не
круговой,
а
развертывания
секторный
обзор
путем
(сканирования)
ДН
антенны в заданном секторе, ширина
Рис. 1.10. Отметки целей
на индикаторе «уголдальность»
которого намного больше ширины ДН.
В РЛС секторного обзора, угловые
размеры
которого
намного
больше
ширины ДН, характеристики пространственно-временной модуляции и
физические принципы измерения ничем не отличаются от таких же, как и
при круговом обзоре. В этих РЛС чаще используются индикаторы «азимутдальность» и «угол места-дальность» с прямоугольными координатными
сетками, Рис. 1.10. Подробно вопросы обзора пространства в РЛС
рассматриваются в разделе 2.
45
В современных РЛС все более широкое распространение получают
ФАР, представляющие собой многоканальные антенные системы.
При многоканальном приеме пространственная модуляция сигналов
проявляется в амплитудно-фазовом распределении поля в приемных
элементах антенны, что позволяет сравнительно просто измерить
направление прихода сигнала
(азимут или угол места ). Для
иллюстрации сказанного положим, что антенна РЛС неподвижна, имеет
два излучателя, которые в плоскости определения угла разнесены на
расстояние
d
, а источник сигнала (цель) находится в дальней зоне (Рис.
1.11 а).
Це ль
Rц1
Rp
Фронт
волны
Луч
Rц 2
1
1
0
d
2
2
М
(М‐1)
∑
а)
Компенсация
фазы
б)
к приемнику
Рис. 1.11. Пояснение принципа измерения угловой координаты
Каждый из излучателей 1 и 2 облучает один и тот же объем
пространства, в результате чего принятые сигналы одинаковы по
амплитуде и частоте f0 , но отличаются запаздыванием из-за разности
расстояний R p Rц1 Rц 2 d sin .
На рисунке 1.11 а направления приема
отсчитывается от нормали
к раскрыву антенны. Разность запаздываний сигналов t р проявляется в
разности их фаз , и поэтому имеем
46
2f 0 t p 2f 0
R p
c
2
d
0
sin ,
(1.15)
где 0 – длина волны сигнала.
Между излучателями фаза набегает линейно, аналогично тому, как
это происходит в пачке импульсов, если 𝑉 ц
0.По измеренной величине
можно определить направление на цель (направление приема)
ц arcsin
0
2d
(1.16)
Другими словами, измерение угловой координаты при этом сводится
к измерению разности фаз принимаемых сигналов.
Наращивая число слабонаправленных излучателей антенны с
равными расстояниями
d
между ними, получим эквидистантную
линейную фазированную антенную решетку (ФАР) из М элементов (Рис.
1.11 б). В ней фазовый сдвиг, равный минус устанавливается между
смежными излучателями (элементами), а максимум излучения (приема) ее
ДН можно ориентировать на направление ц , не совпадающее с нормалью
к плоскости антенны.
1.5.
Физические принципы разрешения целей в активных РЛС.
1.5.1. О понятии «рэлеевское разрешение»
Решение
задачи
разрешения
целей
(сигналов)
предполагает
раздельное извлечение информации из однотипных, налагающихся друг на
друга эхо-сигналов целей. Как правило, в РЛС этап разрешения
предшествует этапу измерения координат целей, так как их оценка
осуществляется внутри элемента разрешения по каждой координате.
При этом любая из разрешаемых координат цели (дальность,
скорость,
пространственное
направление)
может
служить
для
ее
идентификации. Количественное определение разрешающей способности,
которое характеризует возможность РЛС различать цели с близкими
47
значениями параметров, часто заимствуют из физической оптики. По
аналогии и в радиолокации часто пользуются понятием Р е л е е в с к о е
разрешение.
В соответствии с этим понятием, два сигнала с одинаковой
амплитудой
∆𝐴
0,7 𝐴
считаются
разрешенными
по
координате
𝛼,
если
, как показано на Рис. 1.12, то величина ∆𝛼 количественно
равна разрешающей способности. В радиотехнике использовать критерий
Релеея для определения разрешающей способности можно только в случае,
когда случайными факторами, шумами и помехами можно пренебречь.
Кроме того, в отличие от оптики, в радиотехнике разрешаемые сигналы
могут интерферировать, то есть, иметь случайные относительные фазовые
сдвиги. Это означает, что при одном и том же значении разности
параметров разрешения ∆𝛼 по критерию Релеея сигналы (цели) могут
оказаться разрешаемыми и неразрешаемыми.
ΔА
Аmax
а1
а1
Δa
а
Рис. 1.12. Пояснение принципа измерения угловой координаты
В упрощенной трактовке в радиолокации считается, что два близко
расположенных по параметру 𝛼 сигнала разрешаются, если после их
согласованной обработки (см. раздел 4) субъективно они могут
наблюдаться раздельно, например на ИУ.
Исходя из этого, мера разрешающей способности РЛС по параметру
𝛼 будет оцениваться наименьшим интервалом ∆𝛼
48
при котором сигналы
не сливаются. При этом считается что их остальные параметры одинаковы.
Статистический
подход
к
задаче
разрешения
целей
подробно
рассматривается в разделе 6.
1.5.2. Разрешающая способность по дальности
Пусть в зоне действия РЛС в одном угловом направлении на
дальностях Rц1 и Rц 2 находятся две цели, летящие с одинаковыми
радиальными
скоростями
(Рис.
1.13),
и
наблюдаемые
в
луче
радиолокатора.
Луч антенны
V r1
V r2
V r1= V r2
Рис. 1.13. Две цели с разной дальностью в зоне действия РЛС.
𝜏и
Сигналы, отраженные от этих целей, в
uc1(t)
а
0
∆𝜏з
б
Zc1(t)
𝜏вых
0
1
в 0,5
0
Zc1(t)
Zc2(t)
∆𝜏з𝑚𝑖𝑛
uc2(t)
t
Zc2(t)
𝜏вых
t
виде
простых
(без
внутриимпульсной
модуляции) радиоимпульсов u c1 (t ) и uc 2 (t )
(Рис. 1.14 а) со смещением на t з u
( t з t з1 t з 2 )
воздействуют
на
вход
линейного согласованного приемника (см.
t
раздел 4). Проходя через приемный тракт,
Рис. 1.14. К пояснению каждый из этих сигналов приобретает
разрешения по времени
ромбовидную, а после детектирования –
запаздывания
треугольную форму (сигналы Z c1 (t ) и Z c 2 (t ) на Рис. 1.14, б). На экране
49
индикатора с амплитудной отметкой или осциллографа сигналы Z c1 (t ) и
Z c 2 (t ) имеют длительность вых u t з . Они образуют два максимума и
наблюдаются раздельно, т.е. разрешаются.
По мере уменьшения величины t з сигналы с1 (t ) и c 2 (t ) сближаются
и, в конце концов, сливаются в один (не разрешаются), т.е. суммарный
сигнал имеет вид одного импульса с одним максимумом. Часто считают,
что
два
одинаковых
сигнала
разрешаются
по
Релею,
если
они
перекрываются на уровне не более 0,7 амплитуды (минус 3 дБ) (Рис.
1.14, в). Еще раз отметим, что этот уровень условен. Исходя из этого, мера
разрешающей способности РЛС по времени запаздывания оценивается
наименьшим интервалом ∆𝑡з =∆𝑡
между сигналами, при котором они
наблюдаются раздельно.
При согласованной фильтровой обработке (см. раздел 4) в приемнике
простых и сложных отраженных сигналов величина вых определяется
шириной спектра
f и
ЗС, т.е.
вых 1 f и .
Соответственно мера
разрешающей способности совмещенной РЛС по дальности (элемент
разрешения по дальности) равна
R
где
1 f и
c
c 1
,
2
2 f и
(1.17)
– мера разрешающей способности по времени
запаздывания.
Таким образом, полагают, что два одинаковых сигнала разрешаются
по времени запаздывания, если
Для
простых
t з t з1 t з 2 1 / f и ;
радиоимпульсов
(радиоимпульсов
без
внутриимпульсной модуляции) длительностью и произведение f и и 1,
следовательно, R c и .
2
При заданной длительности зондирующего импульса и const
разрешающую способность РЛС по дальности можно улучшить за счет
50
расширения
спектра
зондирующего
сигнала
(см.
(1.17))
путем
внутриимпульсной фазовой манипуляции или частотной модуляции.
Доказательство
рассматриваются
этого
положения
функции
приведено
неопределенности
в
разделе
4,
где
радиолокационных
сигналов.
1.5.3. Разрешающая способность по радиальной скорости
Пусть в одном и том же элементе разрешения по дальности в луче
совмещенной активной РЛС находятся две цели с разными радиальными
скоростями Vrц1 и V rц 2 Рис. 1.15. Пусть эти цели облучаются одиночными
импульсными сигналами длительностью и .
Луч антенны
Vr2
Rц2
Vr1
РЛС
Rц1
Rц1 = Rц2
Рис. 1.15. Две цели с разной скоростью в зоне действия РЛС
Соответственно они будут наблюдаться раздельно, если из-за
эффекта Доплера попадут в разные частотные фильтры, расстроенные по
частоте на F Д 1 / и . Тогда мера разрешающей способности совмещенной
РЛС по скорости (элемент разрешения по скорости) равна:
Vr
0
2
F Д ,
(1.18)
Поэтому два одинаковых импульсных сигнала разрешаются по
частоте если разность их доплеровских частот составляет
FД FД1 FД 2 FД 1/ и
(1.19)
Это означает, что чем больше длительность сигнала, тем меньше F Д
и тем лучше разрешение по радиальной скорости (см. Рис. 1.7 г). Очевидно,
что в импульсных РЛС значительное увеличение длительности ЗС по
51
энергетическим соображениям невозможно. Поэтому в них используется
так называемые «пачечные» сигналы (см. подраз. 1.4.3).
Они представляют собой последовательности из
M
когерентных
радиоимпульсов (когерентной пачки радиоимпульсов). Спектры таких
сигналов имеют периодическую (гребенчатую) структуру, показанную на
Рис. 1.8, а. Частотный интервал между гребнями 𝐹д
1/Т, где
T
– период
следования импульсов пачки. Тогда мера разрешающей способности по
частоте ∆𝐹д будет определяется длительностью пачки п
FД
1
п
1
.
(M 1)T
(1.20)
При отражении сигнала от движущейся цели все гребни спектра
смещаются на одинаковую величину F д (Рис. 1.8 б), и это смещение не
влияет на разрешающую способность пачки по частоте Доплера.
При использовании М-элементного пачечного сигнала с периодом 𝑇
выигрыш в разрешающей способности по скорости по сравнению с
одиночным сигналом пропорционален скважности импульсов 𝜂
𝑇⁄𝜏и и
составляет
K
(M 1)T
и
(M 1) 𝜂,
(1.21)
Согласно 1.21 разрешающая способность РЛС по скорости за счет
применения пачечных сигналов может быть улучшена относительно
парциального сигнала на несколько порядков. При этом разрешающая
способность по дальности сохраняется такой же, как и у одиночного
импульса.
1.5.4. Разрешающая способность по угловой координате
Для определения разрешения по любой угловой координате,
например, по азимуту, рассмотрим ситуацию, показанную Рис. 1.16. Две
цели находятся на одинаковой дальности 𝑅ц
𝑅ц
𝑅ц от РЛС, имеют
одинаковые радиальные скорости 𝑉 и угол места 𝜀, но отличаются
52
пространственным разносом на угол
в плоскости, перпендикулярной
апертуре антенны. Заметим, что если плоскость антенны не имеет наклона,
то эта плоскость определяется как азимут цели Δ𝜃
Δ𝛽. В данной
ситуации возможности разрешения целей определяются их угловым
разносом и шириной ДН антенны ∆𝜃 по заданному уровню амплитуды. В
самом деле, при последовательном перемещении луча в горизонтальной
плоскости амплитудная огибающая принятых сигналов будет иметь вид,
показанный на Рис. 1.12. При угловом разносе целей на угол Δ𝜃
Δ𝜃 в
огибающей будет наблюдаться «провал», который может служить
критерием разрешения. Ширина луча антенны обратно пропорциональна
ее эффективной длине (𝐿аэф , выраженной в длинах волн
𝑘 𝜆 /𝐿аэф ,
где
𝑘
–
коэффициент
𝜆 : Δ𝜃
пропорциональности.
В
рассматриваемом случае 𝐿аэф , взятое вдоль горизонтальной координаты x
определяет меру разрешения по угловой координате. Пренебрегая шумами
и помехами, докажем это утверждение.
y
Vr1
x
Rц2
Rц1
𝜃
𝜀2
𝜀1
𝜃
Lаy
Vr2
Δ𝜃
P
Rц1
Rц2 , Vr1
Vr2 , ε1
ε2
Рис. 1.16. Две цели разнесенные на угол ∆𝜃 в горизонтальной плоскости
В двухцелевой ситуации, показанной на Рис. 1.16, на апертуре
антенны будет наблюдаться суперпозиция полей с амплитудами A1 и A2,
порожденными первой и второй целью. Закон амплитудно-фазового
распределения в раскрыве при
1
можно описать выражением:
53
𝐴 𝑥
𝐴 exp 𝑗2𝜋𝑓 𝑡 exp j
2𝜋𝑥
𝑠𝑖𝑛𝜃
𝜆
2𝜋𝑥
sin 𝜃 Δ𝜃
𝜆
2𝜋𝑥
2𝜋
𝐴
𝐴 exp 𝑗2𝜋𝑓 𝑡 exp j
𝑠𝑖𝑛𝜃 1
exp j
𝑥Δ𝜃𝑐𝑜𝑠𝜃
𝜆
𝜆
𝐴
𝐴 exp 𝑗2𝜋𝑓 𝑡 exp j
(1.22)
Как видно из 1.22, линейный набег фазы вдоль оси x в этой ситуации
оказывается промодулированным медленно изменяющимся множителем,
стоящим в квадратных скобках. Эта модуляция и несет информацию о том,
что в пространстве была не одна, а две цели. Считаем, что факт наличия
модуляции установлен, если на апертуре данной 𝐿
можно наблюдать хотя
бы один ее период (те же рассуждения можно привести для оси y). Это
соответствует условию:
2𝜋𝐿
𝜆
Отсюда
вытекает
Δ𝜃𝑐𝑜𝑠𝜃
(1.23)
2𝜋
формула
для
определения
разрешающей
способности или меры разрешения по углу
Δ𝜃
где 𝐿аэф
𝜆
𝐿
эф
,
(1.24)
𝐿 𝑐𝑜𝑠𝜃 – эффективная длина раскрыва или проекция
раскрыва антенны на угловое направление 𝜃.
Мера разрешения (1.24) наглядно показывает, что разрешающая
способность РЛС по угловым координатам зависит только от отношения
длины волны к эффективному размеру антенны в соответствующей
плоскости.
1.5.5. Угловое разрешение при синтезировании апертуры
Реализовать большую апертуру с высоким отношением 𝐿аэф /𝜆 часто
оказывается
практически
неосуществимым
из-за
конструктивно-
технических и стоимостных показателей. Особенно проблемна эта задача
для бортовых (самолетных и вертолетных) РЛС, так как на летательных
54
аппаратах (ЛА) нет места для размещения крупногабаритных антенн. В
связи с этим в последние годы в них все большее распространение получил
метод активного синтезирования апертуры. Под синтезированной
апертурой (СА) понимают виртуальную апертуру антенны, образованную
слабонаправленным приемным или приемо-передающим элементом,
установленным на ЛА. В процессе движения он занимает в пространстве
ряд последовательных положений (Рис. 1.17). Принятые в дискретных
точках
трассы
обрабатываются.
полёта
Для
сигналы
пояснения
«запоминаются»
принципа
работы
и
совместно
СА
удобно
воспользоваться частотной областью, т.е. спектральным подходом.
La
VЛА
О
Земля
Рис. 1.17. Принцип синтезирования при боковом обзоре
Для бортовых РЛС бокового обзора, как правило, ставится задача
определять направления и разрешать наземные объекты, как показано на
рисунке 1.17. Пусть неподвижный наземный объект О рассеивает
зондирующий сигнал бортового передатчика с частотой 𝑓 . При прямом и
обратном распространении частота 𝑓
получает двойной доплеровский
сдвиг, равный
Δ𝐹Д
1
1 𝑑𝑅 𝑡
𝑐 𝑑𝑡
𝑓
1
2 𝑑𝑅 𝑡
𝑐 𝑑𝑡
1 𝑑𝑅 𝑡
𝑐
𝑑𝑡
(1.25)
В формулу (1.25) входит производная по времени от функции
расстояния до объекта, равная радиальной скорости ЛА.
𝑉ЛА 𝑠𝑖𝑛𝜃,
55
(1.26)
где 𝑉ЛА – путевая скорость ЛА, движущегося прямолинейно.
𝜃 – угол, под которым наблюдается объект с борта ЛА;
В обычных условиях 𝑉ЛА ≪ 𝑐, и поэтому последним слагаемым в
(1.25) можно пренебречь. Тогда, с учетом (1.26) для доплеровского сдвига
частоты имеем:
Δ𝐹Д
2𝑉ЛА 𝑠𝑖𝑛𝜃
𝑓
𝑐
(1.27)
𝑐𝑜𝑛𝑠𝑡, а расстояние от объекта до ЛА достаточно
Если 𝑉ЛА
большое, то из уравнения (1.27) можно найти направление 𝜃, если оно
практически не менялось за время полета (Рис. 1.18). Это допущение в
реальных ситуациях может не выполняться, и в процессе движения
приемо-передатчика угол 𝜃 может изменяться, как показано на рисунке .
1.19. Если за время синтезирования Tс существенно изменились дальность
и направление на объект О, то зависимость 𝜃 𝑡
можно представить
степенным рядом, и формула (1.27) примет вид:
2𝑉ЛА
𝑠𝑖𝑛𝜃
𝑐
Δ𝐹Д
(1.28)
𝜃 𝑡𝑠𝑖𝑛𝜃 𝑓
VЛА
VЛА
𝜃 𝑇𝑐
𝜃0
R0
R0 T c
R0
𝜃 𝑇𝑐
𝜃0
𝜃0
R0 ≈ R0 Tc
R0 Tc
R 0 ≠ R 0 Tc
О
Рис. 1.18. Синтезирование при
постоянстве направления на
объект
𝜃0
О
Рис. 1.19. Синтезирование при
изменении направления на объект
В формуле (1.28) разложение 𝜃 𝑡
ограничено двумя первыми
членами ряда, что справедливо в большинстве практических случаев.
Используя 1.20 определим коэффициент разложения 𝜃 . Согласно 1.20,
длина пролета ЛА, соответствующая длине СА, за время синтезирования
56
равна 𝐿СА
𝑉ЛА 𝑇с . За то же время угол, под которым виден объект,
изменился на величину
Δ𝜃
𝜃 𝑇с
𝜃
𝑉ЛА 𝑇с 𝑐𝑜𝑠𝜃 /𝑅
(1.29)
𝑉ЛА 𝑐𝑜𝑠𝜃 /𝑅 . В этой ситуации приращение
Из (1.29) следует 𝜃
доплеровской частоты Δ𝐹Д также будет переменным во времени.
2𝑉ЛА
𝑓 𝑠𝑖𝑛𝜃
𝑐
Δ𝐹Д 𝑡
𝑉ЛА 𝑡
𝑐𝑜𝑠 𝜃
𝑅
(1.30)
Таким образом, сигнал с таким доплеровским смещением несет
информацию не только об угле 𝜃 , но и о дальности 𝑅 . Однако, пока сдвиг
Δ𝐹д еще слабо зависит от времени, из 1.30 можно непосредственно
оценивать направление 𝜃 на объект по доплеровскому смещению частоты.
Определим разрешающую способность для РЛС с СА. Согласно
(1.27) для первого и второго положения ЛА эти доплеровские сдвиги
соответственно равны:
𝑓
𝑓
1
2𝑉ЛА
sin 𝜃
𝑐
1
Δ𝜃 𝑓
2𝑉ЛА
𝑠𝑖𝑛𝜃 𝑓
𝑐
2𝑉ЛА
1
𝑠𝑖𝑛𝜃
𝑐
(1.31а)
2𝑉ЛА
Δ𝜃𝑐𝑜𝑠𝜃 𝑓 (1.31б)
𝑐
Тогда при заданных соотношениях амплитуд суммарный сигнал на
выходе приемника РЛС с СА будет иметь вид
o t
𝐴 exp 𝑗2𝜋𝑓 𝑡 1
𝐴
exp 𝑗2𝜋 𝑓
𝐴
𝑓 𝑡 ,
(1.32)
где 𝐴 и 𝐴 – амплитуды сигнала для двух положений ЛА.
Этот сигнал оказывается промодулированным по времени медленно
меняющейся функцией, стоящей в фигурных скобках. Очевидно, что ее
период 𝑇 обратно пропорционален разности частот 𝑇
1 𝑓
𝑓 . Как и
ранее, будем полагать, что и в этом случае критерием разрешения является
возможность наблюдать один период модуляции за время 𝑇. Согласно
(1.31) имеем
57
ЛА
Δ𝜃
𝑓 𝑇𝑐𝑜𝑠𝜃
𝜆 /2𝐿СА 𝑐𝑜𝑠𝜃,
(1.33)
Сравнивая (1.22) с (1.33) можно убедиться в их идентичности с
точностью до коэффициента 1/2. Он отражает двойной сдвиг частоты при
распространении от передатчика к объекту и обратно к приемнику.
Физически это означает, что СА формируется за счет движения и
приемника, и передатчика. Таким образом, СА может иметь практически
неограниченный размер, вплоть до нескольких километров, а размер
обычных антенн редко превосходит несколько метров. Поэтому и
разрешающая способность РЛС с СА несоизмеримо лучше, чем у обычных
антенн радиолокационных диапазонов.
1.6.
Помехи и их математические модели.
Получение радиолокационной информации зависит не только от
параметров сигналов, но и от характеристик помех, которые их маскируют.
Причем наличие того или иного вида помех практически неизбежно.
Поэтому
статистический
все
задачи
характер,
радиолокационного
а
оптимальные
наблюдения
устройства
носят
обработки
радиолокационных сигналов должны быть получены только методом
статистического синтеза. Для его реализации необходимы статистические
модели помех.
Помехи классифицируются на аддитивные и мультипликативные.
Особенностью первых является то, что они не искажают полезный
сигнал x(t), а суммируются с ним и образуют принимаемое колебание y(t).
Источниками аддитивных помех являются внутренние шумы приемных и
антенных
устройств,
умышленные
излучения
от
систем
РЭБ
противодействующей стороны, внешние излучения атмосферы и космоса
и т.д. Активными они считаются потому, что для их создания нужны
источники энергии.
58
Наряду с активными помехами на РЛС воздействуют и аддитивные
пассивные помехи, порожденные собственным сигналом радиолокатора. К
ним относятся: отражения от местных предметов и метеообразований, а
также от облаков диполей и других искусственных образований,
создаваемых для маскировки и искажения радиолокационной информации.
В свою очередь мультипликативные помехи приводят к искажениям
радиолокационного сигнала. К ним относятся флюктуации амплитуды и
фазы
принимаемого
сигнала,
а
также
неоднородности
трасс
распространения. Такие помехи достаточно специфичны и далее основное
внимание
будет
уделено
наиболее
распространенным
аддитивным
помехам.
При выделении полезного сигнала на фоне помех используются
различия
между
ними:
например
частотно-временные
или
пространственные. С учетом этого принимаемые колебания в общем
случае записывается в виде
𝒚 𝑡
𝒏 𝑡, 𝝂
𝐴𝒙 𝑡, 𝜶, 𝜽
(1.34)
где 𝒙 𝑡, 𝜶, 𝜽 – вектор принимаемого полезного сигнала с вектором
частотно-временных
параметров
𝜶
и
вектором
пространственных
параметров 𝜽;
𝒏 𝑡, 𝝂
– М-мерный вектор помеховых колебаний с вектором
параметров 𝝂 (М – число каналов приема);
А=1 – при наличии сигнала и А=0 – при его отсутствии (случайный
множитель).
(Здесь и далее жирным шрифтом будут выделены вектора и матрицы)
Выражение
(1.34)
соответствует
приему
на
дискретную
многоканальную антенну, т.е., на произвольную антенную решетку (АР).
Относительно помехи 𝑛 𝑡, 𝝂 будем полагать, что она представляет
собой векторный случайный стационарный нормальный процесс. Здесь
стационарность следует понимать в том смысле, что, по крайней мере, на
59
интервале существования полезного сигнала и в ближайшей окрестности
статистические характеристики помех не изменяются. Нормальный закон
распределения помеховых колебаний в большинстве случаев оправдан из
физических соображений, так как в относительно узкополосных частотных
приемных трактах РЛС большинство помех нормализуются в соответствии
с теоремой Ляпунова.
Важной
мощности
по
характеристикой
частотам
и
помех
угловым
является
распределение
координатам
(частотный
их
и
пространственный спектры). При равномерном распределении мощности
помех по частоте в полосе пропускания приемника Δfnp помеху называют
квазибелым или белым шумом. Его характерной особенностью является то,
что его дискретные значения, взятые через временной интервал Δt≈1/Δfnp,
оказываются некоррелированными между собой по времени. К таким
некоррелированным
помехам
относятся
практически
все
активные
маскирующие помехи, в том числе внутренние шумы приемников.
Пассивная помеха, порожденная ЗС в общем случае, имеет
неравномерное распределение мощности по частоте, а ряд ее временных
отсчетов коррелирован. Такую помеху обычно называют коррелированной
во времени или небелым шумом.
Пространственное
(пространственный
угловое
спектр)
распределение
учитывается
мощности
корреляционными
помех
связями
колебаний, принятых отдельными элементами АР. При наличии одного
или нескольких внешних источников эти колебания будут коррелированны
между каналами. Поэтому такую помеху называют пространственнокоррелированной или реже пространственно небелым шумом. Для того,
чтобы шум был белым по пространству мощность внешнего помехового
фона должна быть равномерно распределена по сфере (полусфере),
окружающей апертуру приемной АР, что естественно возможно лишь
гипотетически.
60
Итак, под помехой в радиолокации обычно понимают векторный,
случайный,
стационарный,
нормальный
процесс
в
общем
случае
коррелированный по времени и пространству. Именно на фоне таких помех
далее рассматриваются все этапы радиолокационного наблюдения. В
Приложении 2 приводятся статистические характеристики аддитивных
помех при одноканальном и многоканальном приеме в РЛС, в том числе
при их дискретизации. Более полные сведения о статистических свойствах
сигналов и помех обычно рассматриваются в курсе «Случайные процессы
в радиолокации».
61
2. ДАЛЬНОСТЬ ДЕЙСТВИЯ РЛС И МЕТОДЫ ОБЗОРА
ПРОСТРАНСТВА
В разделе представлены основные формы записи уравнения радиолокации,
определяющего дальность радиолокационного наблюдения целей. Рассматривается
влияние помех, подстилающей поверхности и атмосферы на дальность действия и зону
видимости РЛС. Приводятся модификации уравнений дальности в зависимости от
характеристик направленности антенной системы. Показано, каким образом дальность
действия связана со способами обзора пространства в РЛС, в том числе при
использовании ФАР. Рассматриваются факторы, определяющие выбор частотного
диапазона для РЛС различного назначения.
2.1.
Уравнение дальности совмещенного радиолокатора в
свободном пространстве.
Дальность действия является важнейшей характеристикой РЛС. Под
дальностью действия понимают максимальное расстояние, на котором
принимаемый сигнал достигает минимально допустимого (порогового)
уровня, еще достаточного для выполнения радиолокатором основных
функций с качественными показателями не хуже заданных.
Для того, чтобы установить основные зависимости, определяющие
дальность действия активного совмещенного радиолокатора, рассмотрим
ситуацию обнаружения сигнала, распространяющегося в свободном
пространстве. Сначала будем полагать, что атмосфера однородная и в ней
отсутствует затухание электромагнитных волн.
Пусть в некоторой точке пространства
(рис. 2.1) на расстоянии 𝑅ц от РЛС
Рис. 2.1. К определению
дальности действия
радиолокатора
находится цель с ЭПР 𝜎ц . При этом
излучаемая передающей антенной РЛС
электромагнитная
волна
на
довольно
большом расстоянии имеет сферический фронт.
Найдем плотность потока энергии у цели Пц , если импульсная
мощность зондирующего сигнала 𝑃и , а усиление передающей антенны 𝐺пер
62
Пц
𝑃и 𝐺пер
4𝜋𝑅ц
(2.1)
Пц
𝑃и 𝐺пер
4𝜋𝑅ц
(2.2)
Мощность, которая рассеивается целью в сторону РЛС равна
𝑃ц
𝑃и 𝐺пер 𝜎ц
4𝜋𝑅ц
Пц 𝜎ц
(2.3)
По определению ЭПР, вся эта мощность рассеивается эквивалентной
целью изотропно, что позволяет утверждать, что плотность потока энергии
Ппр у приемной антенны РЛС на расстоянии 𝑅ц от цели равна
Ппр
𝑃и 𝐺пер 𝜎ц
.
4𝜋 𝑅ц
𝑃ц
4𝜋𝑅ц
(2.4)
В свою очередь мощность сигнала 𝑃пр на входе приемника РЛС
определяется соотношением
𝑃пр
где 𝑆
э
𝑃и 𝐺пер 𝜎ц 𝑆аэ
,
4𝜋 𝑅ц
Ппр 𝑆пр
(2.5)
– эффективная площадь приемной антенны, пропорциональная ее
геометрической площади 𝑆г (𝑆
𝑘 𝑆г , 𝑘
э
1).
Согласно (2.4), мощность, а следовательно, и энергия сигнала,
отраженного от цели с фиксированными угловыми координатами на входе
приемника
РЛС
обратно
пропорциональна
четвертый
степени
расстояния до цели. Настолько сильная зависимость связана с двукратным
рассеянием энергии на трасах распространения радиоволн до цели и
обратно.
Естественно полагать, что за время длительности зондирующего
импульса 𝜏и параметры 𝐺пер , 𝜎ц , 𝑆
э
не изменяются, а за время наблюдения
T (длительность пачки) их флюктуации можно отнести к изменению
мощности
передатчика
𝑃и
𝑃и 𝑡 .
Тогда
63
для
расчетов
можно
воспользоваться понятием средняя мощность (𝑃ср ) за длительность пачки
импульсов 𝑃ср
𝑃 𝑡 𝑑𝑡/𝑇.
Для определения дальности действия РЛС среднюю мощность
принятого сигнала обычно сравнивают с некоторым минимальным
(пороговым) значением𝑃пр
𝑃пр
. В качестве такого порога, как
правило, выбирают мощность, в несколько раз превышающую мощность
смеси помех и шумов. От величины порога будет зависеть не только
дальность действия РЛС, но и показатели качества обнаружения, без
указания которых нельзя определить 𝑅
. Рассмотрим этот вопрос
подробнее.
Пусть сигнал обнаруживается на фоне белого гауссова шума (БГШ),
порожденного потерями приемного тракта РЛС и собственными шумами
приемника с суммарной шумовой эквивалентной температурой 𝑇ш° 𝐾 в
градусах Кельвина. Мощность этого шума равна:
𝑃ш
где 𝑘
1,38 ∙ 10
𝑘𝑇ш° ∆𝑓пр ,
(2.6)
Дж/град – постоянная Больцмана.
Ширину полосы приемника ∆𝑓пр обычно полагают согласованной с
шириной полосы простого импульсного сигнала ∆𝑓пр
1⁄𝜏и , а для
∆𝑓и
сложного сигнала – с полосой его модуляции ∆𝑓мод , величину которой
можно свести к полосе эквивалентного импульса, длительностью 𝜏иэ
1/∆𝑓мод .
В режиме обнаружения необходимо, чтобы отношение мощности
полезного сигнала к мощности шума превышало некоторое пороговое
значение.
В
радиолокации
это
отношение
получило
название
коэффициент различимости𝐾р . Как показано в разделе 3, величина 𝐾р
определяется требуемыми показателями качества обнаружения: 𝐷 –
условной вероятностью правильного обнаружения (ВПО) и 𝐹 – условной
вероятностью
ложной
тревоги
(ВЛТ).
64
Задаваясь
их
значениями,
необходимо потребовать: 𝑃пр
/𝑃ш
𝐾р 𝐷, 𝐹 и, следовательно, с учетом
(2.4) и (2.5) приходим к неравенству
𝐺пер 𝜎ц 𝑆 э
𝑃и
4𝜋 𝑅ц 𝑘𝑇ш° 𝐾 ∆𝑓и
Э
𝐺пер 𝜎ц 𝑆
4𝜋 𝑅ц 𝑁
𝑃и
В (2.6) обозначено:Э
э
𝐾р 𝐷, 𝐹
(2.7)
/ ∆𝑓и – минимально необходимая
𝑘𝑇ш° 𝐾 – спектральная плотность мощности шума.
энергия сигнала, 𝑁
Таким образом, при требуемых значениях 𝐷 и 𝐹
дальность РЛС 𝑅ц
максимальная
, соответствующая минимальной энергии принятого
сигнала, должна удовлетворять неравенству:
Э 𝐺пер 𝜎ц 𝑆 э
.
4𝜋 𝐾р 𝐷 , 𝐹 𝑁
𝑅ц
(2.8)
Если энергия принятого сигналаЭпревосходитЭ
𝑅ц
в Kраз, то значение
в (2.7) увеличивается пропорционально √K. Из соотношения (2.7),
также следует вывод о невозможности определять дальность действия
РЛС, не задаваясь показателями качества обнаружения.
Выражение (2.7) называют уравнением радиолокации или уравнением
дальности действия РЛС в свободном пространстве. Оно показывает связь
дальности
действия
РЛС
с
ее
характеристиками, показателями качества
2.2.
основными
D
и
F,
техническими
а также ЭПР цели.
Модификации уравнения дальности и зоны обнаружения.
Используя известную теоретическую связь эффективной площади
приемной антенны 𝑆
э
и ее коэффициента усиления 𝐺пр 𝑆
э
𝜆 𝐺пр /4𝜋 ,
уравнение радиолокации (2.7) может быть переписано в виде:
𝑅
Э 𝐺пер 𝐺пр 𝜎ц 𝜆
,
4𝜋 𝐾р 𝐷 , 𝐹 𝑁
где 𝜆 – рабочая длина волны.
65
(2.9)
Отметим, что при использовании в РЛС единой приемно-передающей
антенны под корень четвертой степени в (2.8) следует подставить:
𝐺пер ∙ 𝐺пр
𝐺 .
Зависимость дальности действия от длины волны 𝜆 необходимо
рассматривать с учетом направленных свойств антенны. Так, при
фиксированном значении𝐺пр уменьшение 𝜆 приводит к уменьшению
𝑐𝑜𝑛𝑠𝑡 автоматически
дальности действия, поскольку требование 𝐺пр
приводит к уменьшению эффективной площади антенны 𝑆аэ . При заданном
значении 𝑆аэ уменьшение 𝜆 приводит к увеличению дальности действия в
одном направлении, так как возрастает 𝐺пр .
Пусть в РЛС используется единая приемно-передающая антенна с
одинаковой на передачу и прием диаграммой направленности (ДН) по
полю 𝐹 𝛽, 𝜀 . Тогда усиление передающей антенны и эффективная
площадь на прием также будут зависеть от угловых координат 𝛽 и 𝜀.
𝐺пер 𝛽, 𝜀
𝐺
и𝑆
Здесь 𝐺
𝐹 𝛽, 𝜀 ,
𝑆пр 𝛽, 𝜀
𝑆
𝐹 𝛽, 𝜀 .
(2.10)
– максимальное значение усиления и площади
антенны соответственно (обычно, при 𝛽
𝜀
0, т.е. в направлении
нормали к апертуре).
Учитывая соотношения (2.9), уравнение дальности действия также
запишем в виде зависимости от угловых координат:
𝑅ц
𝑅ц
В
этих
𝛽, 𝜀
𝑅ц 𝐹 𝛽, 𝜀 .
(2.10,а)
𝜎ц 𝑆
Э𝐺
.
4𝜋 Эпр
𝐾р 𝐷 , 𝐹
уравнениях
максимальное
(2.10,б)
значение
дальности
𝑅ц
соответствует отражению от цели, находящейся в максимуме ДН на
передачу и прием
Соотношения (2.10, а) и (2.10, б) описывают область пространства, в
пределах
которой
радиолокатор
может
66
обнаруживать
цели
с
необходимыми показателями качества при заданной ЭПР. Эту область
пространства называют зоной обнаружения. Примеры сечений зон
обнаружения показаны на Рис. 2.2.
Форма
записи
уравнений
(2.7),
(2.8)
может
существенно
модифицироваться, если предположить, что усиление антенны каким-либо
образом зависит от дальности. Пусть цель движется на постоянной высоте
𝐻 на фиксированном азимуте 𝛽 над плоской поверхностью Земли. Обычно
подобные ситуации удобно изображать в координатах «дальность-высота»
на, так называемой, сетке «𝑅-𝐻» (Рис. 2.3). Тогда изменение дальности 𝑅
𝐻 ⁄𝑅 . Если РЛС
связано с углом места 𝜀 простым соотношением: 𝑠𝑖𝑛 𝜀
выполняет функцию дальномера, то целесообразно потребовать, чтобы
антенна концентрировала энергию на малых углах места, т.е. для больших
дальностей
𝑅.
Этому
«косекансная»
𝐹 𝜀
удовлетворяет
угломестная
𝐾 ∙ 𝑐𝑜𝑠𝑒𝑐 𝜀
множитель
требованию
𝐾
так
называемая
ДН
вида
𝑠𝑖𝑛 𝜀
⁄𝑠𝑖𝑛 𝜀, для которой из условия нормировки
𝑠𝑖𝑛 𝜀
.Тогда
максимальная
концентрироваться на минимальном угле 𝜀
энергия
будет
. Очевидно, что по закону
𝑐𝑜𝑠𝑒𝑐 𝜀 будут изменяться и усиление передающей антенны: 𝐺пер
𝐺
𝐹 𝜀 и эффективная площадь антенны на прием: 𝑆пр
H
𝑆
𝐹 𝜀 .
H
Hma
0
RГ
x
RГ
0
RГ
0
RГ
б
а
Рис. 2.2. Сечения зон обнаружения в вертикальной и горизонтальной
плоскостях радиодальномера (а) и радиовысотомера (б).
67
В этом случае уравнение (2.4), определяющее мощность принятого
сигнала, преобразуется к виду
𝑃пр
𝑃и 𝐺
𝑃и 𝐺
𝑆
𝜎ц 𝑠𝑖𝑛 𝜀
4𝜋 𝑅 𝑠𝑖𝑛 𝜀
𝑆
4𝜋 𝐻
𝜎ц
.
(2.12)
Из (2.11) следует, что, если на прием и передачу использовать ДН
вида𝐹 𝜀
𝑐𝑜𝑠𝑒𝑐 𝜀, то мощность принятого сигнала не будет зависеть от
дальности до цели, а только от высоты полета 𝐻ц , точнее она будет обратно
пропорциональна четвертой степени высоты. Поэтому для целей, летящих
на постоянной высоте, принимаемая мощность полезного сигнала 𝑃пр
остается постоянной. Участок зоны от 𝜀
ДН для малых дальностей 𝑅
до угла 𝜀
, ограничивающего
, называется «изовысотным», а для 𝜀
𝜀
– «изодальностным».
Рис. 2.3. Координатная сетка дальность-высота (с учетом кривизны
Земли)
При измерении параметров сигналов (см. раздел 6) задаются
допустимыми
показателями
среднеквадратичными
ошибками
определяются значения 𝑃пр
Эпр
качества
измерения
измерения).
Этими
(например,
показателями
, а значит и максимальная дальность
действия и зона измерения. Как правило, зона измерения несколько ниже
68
зоны обнаружения, что логично вытекает из последовательности этапов
радиолокационного наблюдения.
Понятие зон обнаружения и измерения объединяют в понятие зоны
видимости (зоны радиолокационного наблюдения). Таким образом, зоной
видимости называется часть пространства, в пределах которой
радиолокатор осуществляет функции обнаружения и измерения с
необходимыми показателями качества при заданной эффективной
площади рассеяния цели. В случае обзорных радиолокаторов зону
видимости
называют
также
зоной
обзора.
Для
радиолокаторов
сопровождения целей вводят понятие зоны сопровождения.
Все эти понятия имеют статистический (вероятностный) смысл. Чем
меньше допустимые вероятности ошибок, тем требуется большее значение
Эпр
для сохранения значения 𝑅ц
. Например, цель может быть
обнаружена вне зоны обнаружения и пропущена внутри зоны, но
вероятность пропуска внутри зоны не превосходит допустимой, а вне зоны
превышает ее.
Реальная зона видимости зависит от класса РЛС, технических
параметров ее составных частей, диапазона волн, типа использованных
антенн. На зону видимости влияет большое число факторов: действие
помех, поверхность и атмосфера Земли, метод обзора пространства и т.д.
2.3.
Влияние помех на дальность действия и зону видимости
РЛС
Рассмотрим
влияние
активных
помех
на
дальность
действия
совмещенного радиолокатора. Будем считать, что на совмещенный
радиолокатор с нескольких направлений, отличных от направления
главного луча 𝛽 , 𝜀 , действует J источников помех шумового типа. В
результате действия помех спектральная плотность мощности 𝑁
внутреннего шума, пересчитанная к входу приемника, дополняется
69
суммарной спектральной плотностью мощности J внешних помех 𝑁п ,
которая определяется соотношением
𝑁п
𝑃п 𝐺п
𝑆.
4𝜋𝑅 ∆𝑓п
(2.13)
Здесь 𝑃п , 𝐺п – эффективная излучаемая мощность и коэффициент
усиления антенны 𝑗-го постановщика помехи в направлении на РЛС,
∆𝑓п – ширина
энергетического
спектра
помехи, 𝑅 –
дальность
от
постановщика до РЛС, 𝑆 – эффективная площадь приемной антенны РЛС
для направления прихода и поляризации помеховых колебаний 𝑗-го
постановщика. Значение 𝑆 соответствует уровню бокового лепестка
приемной ДН в направлении 𝛽 , 𝜀 на выбранной поляризации.
Предположим, что в РЛС реализуется алгоритм согласованной
обработки в беспомеховой ситуации для направления 𝛽 , 𝜀 . Такая
обработка осуществляется в условиях коррелированных помех, но без их
компенсации, т.е. в данной ситуации является неоптимальной (различия
между согласованной и оптимальной обработками рассматриваются в
разделе 5).
В
этом
случае
максимальная
дальность
радиолокационного
наблюдения определяется из следующего условия:
Эпр
Эпр
𝐾 𝑁п .
(2.14)
Приближенное равенство имеет место, если интенсивность помех
велика: 𝑁п ≫ 𝑁 , т.е. внутренними шумами можно пренебречь. Выражение
для максимальной дальности действия при воздействии маскирующих
активных помех можно записать в виде
𝑅ц
Э𝐺пер 𝜎ц 𝑆 э 𝜀, 𝛽
.
𝑁п
4𝜋 𝐾 𝐷 , 𝐹 𝑁
(2.15)
Формула (2.14) показывает насколько может измениться максимальная
дальность РЛС при наличии активной помехи 𝑁п , ее отсутствии 𝑁п
70
0
или частичной компенсации 𝑁п
(2.14)
называют
𝑁п . В связи с этим выражения (2.13),
также
уравнениями
противорадиолокации.
Разновидностями уравнений противорадиолокации являются уравнения
самоприкрытия и внешнего прикрытия.
Самоприкрытие.
Это
прикрытие
цели
передатчиком помех, размещенным на ее борту (Рис.
2.4). В этом случае в (2.12) имеем: 𝐽
∆𝑓 , 𝑆
∆𝑓п
помех
Рис. 2.4.
Самоприкрытие
1, 𝑅
𝑅,
𝑆 . (координаты цели и передатчика
совпадают),
т.е.
𝑁п
𝑃п 𝐺п / 4𝜋𝑅 ∆𝑓 .
Подставляя это значение в (2.14) и сокращая обе
части равенства на 1/𝑅 , при 𝑁п ≫ 𝑁 получаем
𝑅ц
Э𝐺𝜎ц ∆𝑓
.
4𝜋 𝐾 𝑃п 𝐺п
(2.16)
Внешнее прикрытие. Это прикрытие цели передатчиками помех,
расположенными вне данной цели, например, на специальных самолетах
или вертолетах радиоэлектронного подавления (Рис. 2.5а). В этом случае
для определения дальности действия РЛС необходимо использовать
соотношение (2.14), где 𝑁п определяется соотношением (2.1). Очевидно,
что активные помехи в силу своей интенсивности могут «ослепить» РЛС
во многих угловых направлениях. Поэтому их компенсация является
крайне важной задачей.
𝑅0
𝑅0
а)
б)
71
Рис. 2.5. Внешнее прикрытие (а) и сечение зоны обнаружения РЛС (б)
На Рис. 2.5б в качестве примера приведены сечения зоны РЛС
кругового обзора на постоянном угле места при воздействии двух
постановщиков
помех.
Слева
–
сечение
зоны
обнаружения
без
компенсации помех, а справа – при ее реализации. В первом случае
«ослепление» РЛС происходит и когда постановщики действуют по
главному лучу и по боковым лепестакам достаточного уровня ДН. Во
втором случае – только когда главный луч антенны направлен на
помехопостовщики. Подробно вопросы компенсации активных гумовых
помех рассматриваются в разделе 5.
2.4.
Влияние Земли на дальность действия и зону видимости
РЛС
Одним из важных допущений, сделанных при выводе уравнения (2.7)
для дальности действия РЛС, было пренебрежение влиянием Земли.
Однако излучение и прием электромагнитных волн антенной РЛС
происходит в некотором телесном угле. Поэтому вследствие отражения
электромагнитных волн от поверхности Земли наряду с основным
появляется дополнительный путь для распространения электромагнитных
волн от РЛС до цели и обратно, как показано на Рис. 2.6. Эхо-сигналы,
отраженные
находящимися
земной
в
поверхностью
пределах
и
другими
диаграммы
отражателями,
направленности
РЛС,
интерферируют с прямыми сигналами от цели, существенным образом
определяя дальность действия РЛС.
Кроме того, радиолокационное наблюдение ранее рассматривалось в
условиях
распространения
электромагнитных
волн
над
плоской
поверхностью Земли. Такая постановка справедлива, если дальность до
цели сравнительно небольшая. В противном случае влияние Земли на
72
дальность действия радиолокатора также будет обусловлено ее кривизной,
которая ограничивает видимость
F(ε)
целей пределами радиогоризонта.
Ц
ДН
ℎ𝑎
ψ
ψ
поверхности
M
ℎ𝜀
/
влияние
отражений радиоволн от земной
‐ε
ε
𝐴
Рассмотрим
ε
𝐴
на
дальность
действия РЛС для случая, когда ее
𝐴//
2ℎ sin 𝜀
можно
Рис. 2.6. Влияние Земли
на дальность действия
локатора
считать
отражающей
2.6).
Кривизна
отражений
зеркально
плоскостью
Земли
в
(Рис.
области
не
имеет,
принципиального значения и ее можно учитывать в виде поправки. При
этом отраженный луч лежит в плоскости падающего луча, а угол
отражения равен углу падения ψ.
Количественно изменение амплитуды и фазы волны при отражении от
Земли
𝑝
характеризуется
𝑝 exp
комплексным
коэффициентом
отражения
𝑗𝜙 . Его амплитуда и фаза зависят от параметров почвы,
поляризации излучаемой волны, угла скольжения ψ и длины волны.
Поскольку высота подъема антенной системы РЛСℎ
значительно
меньше дальности до цели, то лучи АЦ и МЦ (Рис. 2.6) практически
параллельны.
Поле дальней зоны у цели образуется в результате интерференции
прямой
𝐸 𝐹
𝐸 𝐹 𝜀
𝜀 𝑝 exp
𝑗Φ ℎ
и
отраженной
волн. Здесь 𝐹
от
𝜀
поверхности
раздела
– значение комплексной ДН
антенны по полю в свободном пространстве (без учета влияния земли);
Φ ℎ
2𝜋 2ℎ sin 𝜀 /𝜆 – сдвиг фаз колебаний отраженной волны
(относительно прямой волны) за счет разности хода 𝐴 𝐴
напряженность электрического поля.
73
2ℎ sin 𝜀, 𝐸 –
Результат интерференции 𝐸 𝐹 𝜀
𝐸 𝐹
𝜀 𝑝 exp
произведению поля прямой волны 𝐸 𝐹 𝜀
𝑗Φ ℎ
сводится к
и комплексного множителя
Земли, определяемого формулой
𝐹зем 𝜀
1
𝑝 exp
𝑗𝛷 ℎ 𝐹
𝜀 /𝐹 𝜀 .
(2.17)
Множитель (2.16) учитывает переход к эквивалентной антенной
системе, которая наряду с антенной 𝐴включает ее зеркальное изображение
𝐴 с измененными в 𝑝 раз токами (полями в раскрыве). Модуль 𝐹зем 𝜀
комплексного множителя (2.16), называется множителем Земли и равен
𝐹зем 𝜀
arg 𝐹 𝜀
где 𝜙
1
|𝑝|
𝐹 𝜀
𝐹 𝜀
arg 𝐹
2|𝑝|
𝐹 𝜀
cos 𝜙
𝐹 𝜀
𝜙
𝜙 ℎ ,
(2.18)
𝜀 .
Множитель Земли на прием рассчитывается по тем же формулам (2.16),
(2.17), что и на передачу. Их значения могут не совпадать при различиях в
ДН приемной и передающей антенн.
Среднее значение энергии принимаемого сигнала Эпр представляется
как произведение этого значения для свободного пространства Э
квадратов множителей Земли на передачу 𝐹зем
направления на цель 𝜀
𝜀 и на прием 𝐹зем
пр
и
𝜀 для
𝜀ц :
Эпр
Э
пр 𝐹зем
𝜀ц 𝐹зем 𝜀ц
Тогда максимальная дальность действия радиолокатора с учетом
влияния Земли будет равна
𝑅ц
𝑅ц
𝐹зем 𝐹зем ,
(2.19)
где 𝑅ц имеет тот же смысл, что и в соотношениях (2.10).
При использовании единой приемно-передающей антенны 𝐹зем
𝐹зем
𝜀
𝜀
𝐹зем 𝜀 и тогда имеем
𝑅ц
𝑅ц 𝐹зем .
74
(2.20)
В простейшем случае зеркального отражения, которое наблюдается при
малых углах места, комплексный коэффициент отражения можно принять
равным 𝑝
1
|𝑝 |
180° . Такие значения характерны для
1, 𝜙
спокойной поверхности моря – на всех длинах волн, начиная с
сантиметровых, или от гладкой поверхности Земли на метровых волнах. В
этом случае при любой поляризации амплитуда отраженной волны равна
амплитуде падающей волны, а фаза отличается на 180° . Тогда при
симметричной ДН антенны (без учета влияния Земли) и ее горизонтальном
расположении над поверхностью Земли, когда𝐹 𝜀
𝐹зем 𝜀
2 sin
𝐹
𝜀 , получим
2𝜋
ℎ sin 𝜀 .
𝜆 а
(2.21)
Таким образом, множитель 𝐹зем изменяется по синусоидальному
закону, достигая максимального значения 𝐹зем
2 в направлениях, где
аргумент синуса равняется нечетному числу 𝜋/2 (волны прямая и
отраженная
H
складываются
в
фазе)
и
стремится к нулю в направлениях, где этот
Fзем
h/ 3
p 1
аргумент
равен
целому
числу𝜋.
Следовательно, зависимость 𝐹зем от 𝜀 имеет
лепестковый характер, причем количество
0о
2ℎа /𝜆. Кривые
лепестков равняется 𝑛
2R
множителя
Рис. 2.7. Кривые
множители Земли
Земли
в
дальность-высота для ℎа /𝜆
координатах
3 показаны
на Рис. 2.7.
Как видно из Рис. 2.7 и соотношения (2.20), интерференционный
множитель Земли имеет чередующиеся максимумы и минимумы с
порядковыми номерами 𝑛
𝜀
𝑎𝑟𝑐𝑠𝑖𝑛
𝜀
𝜆 2𝑛 1
,
4ℎа
𝑎𝑟𝑐𝑠𝑖𝑛
𝜆𝑛
,
2ℎа
𝑛
𝑛
75
0,1,2, …
0,1,2, …
(2.21 а)
(2.21 б)
Из (2.21) в частности следует, что при 𝐹 𝜀
𝑛
𝐹
𝜀 малым углам места
0 всегда соответствуют наиболее глубокие провалы ДН, вплоть до
нуля вдоль линии горизонта.
Если предположить, что ℎ sin 𝜀 ≪ 1 иsin 𝜀
𝜀
𝐻ц /𝑅ц , (𝐻ц – высота
цели над горизонтом), то выражение для множителя Земли можно выразить
соотношением
𝐹зем
4𝜋ℎ 𝐻ц
.
𝜆 𝑅ц
(2.23)
Подставляя (2.22) в (2.19) для максимальной дальности 𝑅ц
𝑅
,
имеем
𝑅ц
𝑅ц
4𝜋ℎ 𝐻ц
.
𝜆 𝑅
Тогда максимальная дальность обнаружения такой низколетящей цели
𝑅ц
4𝜋𝑅ц ℎ 𝐻ц
𝜆
(2.24)
и оказывается пропорциональной квадратному корню из 𝑅ц , т.е. она
пропорциональна корню восьмой степени от входящих в подкоренное
выражение
(2.7)
энергетических
параметров
𝑃и , 𝐺пер , 𝜎ц и т. д. ,
определяющих 𝑅ц .
Сравнивая (2.7) и (2.23), можно сделать вывод о том, что при работе
РЛС по низколетящим целям наращивание энергетического потенциала
РЛС малоэффективно с точки зрения увеличения дальности действия. С
этой целью, в первую очередь, следует как можно выше поднимать
фазовый центр антенны, увеличивая ℎ . Например, для того, чтобы
увеличить дальность действия на 40% достаточно увеличить ℎ всего в два
раза. Такой же эффект по маловысотным целям можно достигнуть
повышением мощности передатчика в 16 раз.
Таким образом, при зеркальном отражении от Земли дальность
действия радиолокатора зависит от угла места цели и может быть как
76
больше, так и меньше величины 𝑅ц . Наибольшее значение дальности
действия достигает2𝑅ц , а наименьшее равно нулю. Увеличение дальности
до 2𝑅ц возможно, если площадка вокруг радиолокатора является гладкой.
Однако в реальных условиях поверхность Земли имеет неровности,
которые могут вызвать изменение характера отражения электромагнитных
волн.
Высота неровностей, при которой поверхность Земли можно считать
гладкой, равна 𝛿
𝜆/16𝑠𝑖𝑛𝜓. Это условие выполняется только для
метровых волн. На дециметровых волнах необходимо также учитывать
диффузный характер отражения электромагнитных волн. В сантиметровом
диапазоне поверхность Земли почти всегда шероховатая, и поэтому|𝑝|во
много раз может оказаться меньше, чем при зеркальном отражении.
В общем случае, когда модуль коэффициента отражения |𝑝|
зависимость 𝑅ц
1,
𝜀 также носит лепестковый характер. Однако в этом
2𝑅ц , а провалы менее глубокие.
случае 𝑅ц
Дальность
ограничивает
прямой
видимости.
дальность
Кривизна
действия
земной
РЛС
поверхности
расстоянием
прямой
видимости𝑅вид .Оно зависит от высоты подъема антенны РЛС ℎ и высоты
цели 𝐻ц . На Рис. 2.8 показан ход лучей в предельном случае наблюдения
за целью в точке С, расположенной на линии, касательной к земной
поверхности. Из рисунка видно, что дальность прямой видимости равна
𝑅вид
𝑟з
𝐻ц
2𝑟з
где 𝑟з
𝑟з
𝑟з
𝐻ц
ℎ ,
ℎ
𝑟з
(2.25)
6370 км – радиус Земли.
Подставив это значение радиуса Земли в (2.24), получим
𝑅вид км ≃ 3,57
ℎ м
𝐻ц м .
77
(2.26)
Далее будет показано, что соответствующее искривление траектории
радиолуча в атмосфере Земли может немного увеличивать дальность
прямой видимости.
Rвид
A
ha
C
Hц
rз
O
Рис. 2.8. Влияние кривизны земной поверхности на дальность действия
С
учетом
конечных
размеров
поперечного
сечения
области
пространства, существенной для распространения, можно выделить три
возможных случая в зависимости от дальности 𝑅 между точками 𝐴 и 𝐶
(Рис. 2.8). Если дальность до цели 𝑅ц
0,2𝑅вид , то поверхность Земли
можно считать плоской. Если выполняется условие 0,2𝑅вид
𝑅ц
0,8𝑅вид ,
то первая зона Френеля не перекрывается выпуклостью Земли. Если
0,8𝑅вид
𝑅ц
1,2𝑅вид , то цель находится в области полутени.
Необходимо
различать
особенности
распространения
электромагнитных волн в пределах прямой видимости 𝑅вид и вне нее. В
первом случае поле в зоне радиолокационного наблюдения имеет
интерференционный характер, поэтому при выполнении расчетов следует
вводить коррекцию, учитывающую кривизну земной поверхности. Вне
этой зоны пользоваться этими формулами нельзя.
78
2.5.
Влияние атмосферы на дальность действия и зону
видимости РЛС
2.5.1. Эффект рефракции
До сих пор при анализе дальности действия предполагалось, что
распространение
электромагнитных
волн
происходит
в
свободном
пространстве. На самом деле атмосфера представляет собой неоднородную
среду, в которой изменения диэлектрической проницаемости вызывают
изменения коэффициента преломления. В результате этого происходит
искривление траектории радиолуча – рефракция электромагнитных волн.
При определении дальности действия радиолокационных систем также
приходится учитывать поглощение радиоволн при их распространении в
атмосфере. Степень влияния этих факторов зависит от частотного
диапазона и условий эксплуатации РЛС.
На дальность действия РЛС существенно влияет нижний слой
атмосферы – тропосфера. В тропосфере диэлектрическая проницаемость
воздуха является функцией метеорологических параметров: давления
воздуха, температуры и влажности. Метеорологические параметры
атмосферы, а также коэффициент преломления 𝑛 изменяются с высотой 𝐻.
В соответствии с этим, в зависимости от градиента изменения показателя
преломления 𝑛 по высоте 𝑑𝑛/𝑑𝐻, различают три характерных случая
распространения электромагнитных волн (Рис. 2.9):
1. Рефракция
отсутствует:
𝑑𝑛/𝑑𝐻
0.
Распространение
электромагнитных волн происходит прямолинейно.
2. Отрицательная рефракция, которая возникает при увеличении
показателя преломления с высотой: 𝑑𝑛/𝑑𝐻
0. Радиолуч отклоняется
вверх от прямой линии.
3. Положительная рефракция, которая имеет место, когда показатель
преломления убывает с высотой: 𝑑𝑛/𝑑𝐻
от прямой.
79
0. Радиолуч отклоняется вниз
Как видно из Рис. 2.9, положительная рефракция, в отличие от
отрицательной, ведет к увеличению дальности радиолокационного
обнаружения.
ha
м–
м–1
Рис. 2.9. Рефракция радиоволн
Для количественной оценки влияния рефракции на дальность действия
РЛС в каждом конкретном случае из-за изменчивости состояния
атмосферы необходимо знать закон изменения показателя преломления по
высоте. Общее решение этой задачи для разного состояния атмосферы
получить
не
удается.
Поэтому
оценка
влияния
рефракции
на
радиолокационное наблюдение проводится, прежде всего, для стандартной
атмосферы. Полученные результаты после необходимой корректировки
могут быть использованы и в других случаях.
В условиях стандартной атмосферы градиент показателя преломления
отрицательный,
например
dn / dH 4 10 8 [м 1 ] .
Это
сравнительно
небольшое изменение коэффициента преломления по высоте ведет к тому,
что возникает положительная рефракция радиолуча, которую называют
нормальной (стандартной).
Распространение ультракоротких волн над сферической поверхностью
Земли
радиуса
𝑟з
в
неоднородной
тропосфере
с
коэффициентом
преломления 𝑛, убывающим с высотой, можно свести к случаю
прямолинейного распространения электромагнитных волн в однородной
атмосфере с постоянным коэффициентом преломления над сферической
поверхностью
эквивалентного
радиуса
80
𝑟з эк
𝑘рф 𝑟з ,
где
𝑘рф
1
𝑟 𝑑𝑛/ 𝑑𝐻
–
коэффициент
рефракции.
стандартной атмосферы коэффициент рефракции 𝑘рф
6370 ∙ 1,33
Для
условий
1,33. Тогда 𝑟з эк
8470 км.
Одним из проявлений атмосферной нормальной рефракции является
увеличение дальности прямой видимости. Чтобы учесть это увеличение, в
выражение (2.24) вместо 𝒓з необходимо подставить эквивалентный радиус
Земли 𝒓з эк для условий стандартной атмосферы. Тогда для дальности
прямой видимости получим
𝑅вид км
4,12
ℎа м
𝐻ц км .
(2.27)
Из сравнения (2.26) с (2.25) следует, что в нормальных атмосферных
условиях рефракция увеличивает дальность прямой видимости. С другой
стороны,
искривление
траектории
радиолуча
ведет
к
ошибкам
радиолокационных измерений. Это связано с тем, что реальные
атмосферные условия могут отличаться от стандартной атмосферы. В
связи с этим остановимся на особых случаях положительной рефракции.
Если коэффициент преломления воздуха изменяется с высотой так, что
градиент
dn / dh a 4 10 8 м 1 ,
то
искривление
траектории
радиолуча
увеличивается по сравнению с условиями стандартной атмосферы. При
dn / dh a 1,57 10 7 м 1
наступает критическая рефракция, при которой
траектории радиолуча, имевшая вначале горизонтальное направление,
превращается в окружность, центр которого совпадает с центром Земли
(Рис. 2.9).
В тропосфере также могут сложиться условия, когда градиент
dn / dH 1,57 10 7 м 1 .
В
подобных
случаях
возникает
тропосферная
сверхрефракция, и кривизна траектории радиолуча становится больше
кривизны поверхности Земли. При этом радиолуч, претерпевая полное
внутреннее отражение, возвращается на Землю и далее, отразившись от ее
поверхности, вновь претерпевает полное внутреннее отражение и т.д. В
81
результате возникает "тропосферный волновод". Явление сверхрефракции
наблюдается летом над морем, когда нижние слои воздуха охлаждены и
насыщены влагой, а также в степных районах. Высота тропосферного
волновода составляет 40 – 200м Возникновение волноводного канала
приводит к резкому увеличению предельной дальности распространения
ультракоротких (UHF) волн.
Ионосферная
рефракция
связана
с
электронной концентрации 𝑁э 𝑁э 𝐻 𝑀
изменением
по
высоте
H
. Это ведет к изменению
показателя преломления в зависимости от частоты для радиолокационного
диапазона волн, а его значение определяется равенством
𝑛
1
80,8𝑁э 𝐻 ⁄𝑓 .
(2.28)
Электронная концентрация Nэ(Н) зависит от времени суток (день, ночь),
от фазы цикла солнечной активности, возрастая при ионизации атмосферы
солнечным излучением и действии возмущающих факторов (например,
ядерного взрыва).
Согласно (2.27), с увеличением частоты влияние ионосферы сильно
ослабевает
(пропорционально
1 / f 2 ).
Поэтому
в
диапазоне
СВЧ
ионосферная рефракция практически не влияет на дальность действия
РЛС, но может сказаться на точности измерений. Заметим, что при оценке
влияния рефракции в ионосфере обычно не удается ограничиться
введением эквивалентного радиуса Земли.
В диапазоне коротких волн наблюдается регулярная ионосферная
сверхрефракция (Рис. 2.10), что позволяет принимать сигналы с
ИОНОСФЕРА
использованием
односкачковых
и
многоскачковых отражений от ионосферы и
Земли.
Рис. 2.10. Регулярная
ионосферная сверхрефракция
Это определяет
возможность
возвратно - наклонной загоризонтной
радиолокации,
82
хотя
картина
в
действительности более сложная, чем на Рис. 2.10.
2.5.2. Затухание волн в атмосфере
Затухания электромагнитных волн в атмосфере может существенно
повлиять на дальность действия радиолокатора.
Затухание электромагнитных волн в атмосфере обусловлено двумя
причинами:
- поглощением энергии электромагнитных волн газами атмосферы,
гидрометеорами, частицами пыли и дыма;
- рассеянием
электромагнитных
волн
жидкими
и
твердыми
частицами, которое ведет к уменьшению плотности потока энергии
волны.
Уменьшение плотности потока энергии электромагнитной волны с
расстоянием происходит по экспоненциальному закону. Поэтому в
формулы,
выражающие зависимость энергии (мощности) на входе
приемника от расстояния 𝑅ц , должен вводиться экспоненциальный
множитель ослабления, учитывающий затухание электромагнитных волн.
Области однородной атмосферы, характеризуются постоянством
затухания, поэтому мощность сигнала на входе приемника можно записать
в виде:
𝑃пр
𝑃пр exp
2𝛼𝑅ц ,
(2.29)
где 𝛼 – коэффициент затухания, постоянный для всей траектории
радиолуча, 𝑃пр – мощность сигнала на входе приемника при отсутствии
затухания, т.е. в свободном пространстве.
Значение коэффициента затухания зависит от длины волны 𝜆,
атмосферного давления, влажности и температуры, а также параметров
частиц, вызывающих рассеяние электромагнитных волн. Если в атмосфере
отсутствуют гидрометеоры и иные частицы, то затухание обусловлено
поглощением энергии, главным образом, молекулами кислорода и
водяного пара. В общем случае можно считать, что коэффициент затухания
83
является суммой коэффициентов, характеризующих поглощение энергии
𝛾 , водяного пара
молекулами кислорода
гидрометеоров и других частиц 𝛾 , т.е. 𝛾
Поглощение
энергии
молекулами
𝛾
газов
𝛾 , а также влияние
𝛾
𝛾 .
зависит
от
частоты
электромагнитной волны. При этом существуют области резонансного
поглощения, где интенсивность поглощения резко возрастает. Частоты
резонансного
поглощения
близки
к
частотам
собственных
внутримолекулярных переходов или совпадают с ними. В целом
коэффициент затухания 𝛾 , как правило, возрастает с уменьшением длины
волны.
На Рис. 2.11 показана зависимость коэффициента затухания 𝛾
𝛾
𝛾
в воздухе от длины волны у поверхности Земли при температуре 20 C, когда
в одном кубическом метре воздуха содержится 8 г водяного пара.
α, дБ/км
100
10
1.0
0.3
0.01
0.001
0.1
0.2
0.5
1.0
5
10
λ, см
Рис. 2.11. Зависимость коэффициента затухания в воздухе от длины волны
Из графика (Рис. 2.11) видно, что в сантиметровом и миллиметровом
диапазонах волн имеются пики резонансного поглощения. Теоретические
и экспериментальные исследования показали, что они соответствуют
0,5см и 0,25см для молекул кислорода, а при 0,18см и 1,05см –
молекулам воды. Кроме того, из анализа кривой можно сделать вывод о
том, что поглощением энергии электромагнитных волн парами воды и
84
кислородом воздуха можно практически пренебречь на волнах длиннее
𝜆 = 10 см.
Начиная с длин волн короче 2 см, изменение затухания носит
резонансный характер. В промежутке между резонансами в диапазоне длин
волн 2 мм – 1,35 см (Рис. 2.11) наблюдаются три "окна прозрачности":
𝜆
8,6 мм 𝑓
35 ГГц 𝑎
0,07дБ/км
𝜆
3,6 мм 𝑓
95 ГГц 𝑎
0,4дБ/км
𝜆
2,2 мм 𝑓
140 ГГц 𝑎
0,5дБ/км
Именно эти частоты часто рекомендуются для РЛС малого радиуса
действия.
2.5.3. Затухание волн в гидрометеорах
В ряде случаев довольно интенсивное затухание электромагнитных
волн вызывают гидрометеоры. Значение коэффициента затухания среды,
заполненной гидрометеорами, зависит от длины волны, интенсивности
осадков, равномерности распределения частиц, температуры и т.п.
Теоретический
учет
влияния
всех
этих
факторов
затруднителен.
Вследствие этого при расчетах пользуются экспериментальными данными.
На Рис. 2.12 показаны зависимости коэффициента затухания 𝛾 в
гидрометеорах (дождь, туман, снег) от длины волны.
Как видно из данного рисунка, наибольшее затухание вносят частицы
влаги в случае ливней. Но и более слабые дожди и туманы приводят к
значительным затуханиям на миллиметровых и сантиметровых волнах.
85
α, дБ/км
100
10
1.0
0.1
0.01
0.1
0.2
0.3
0.5
1.0
3
5
λ, см
Дождь, интенсивность: 1 – 100 мм/ч, 2 – 30 мм/ч, 3 – 10 мм/ч,
4 – 3 мм/ч, 5 – 1 мм/ч, 6 – 0,3 мм/ч.
Туман, видимость: 7 – 600 м, 8 – 120 м, 9 – 30 м.
Рис. 2.12. Зависимость коэффициента затуханияв ЭМВ в гидрометеорах
от длины волны
Как отмечалось выше, затухание электромагнитных волн в атмосфере
приводит к уменьшению мощности принимаемого сигнала в зависимости
от расстояния по экспоненциальному закону. Иногда для ориентировочной
оценки предполагают, что затухание вдоль всей траектории радиолуча
постоянное, а коэффициент 𝜸 равен некоторой усредненной величине. В
этом случае дальность действия РЛС можно записать как
𝑅
𝑅
exp
0,5𝛼𝑅
.
(2.30)
Решение этого уравнения относительно дальности имеет вид
𝛼𝑅
где
𝛾
𝑅
4,6 1/𝛾 lg 1/𝛾 ,
/𝑅
–
коэффициент,
(2.31)
характеризующий
относительное уменьшение дальности действия вследствие затухания
электромагнитных волн .
Зависимость (2.30) 𝛼𝑅
𝑓 𝛾
удобна для практических расчетов
тем, что она позволяет определять относительное уменьшение дальности
как функцию известных величин 𝛼 и 𝑅 .
На Рис. 2.13 приведенная кривая зависимости 𝛾
𝑓 𝛼, 𝑅
. С
помощью этой кривой можно определять дальность действия РЛС с учетом
затухания.
86
γr
1
0,5
0,2
0,1
0,05
0,02
0,01
1
2
4
10 20 40
100
1000
αR0max
Рис. 2.13. Зависимость коэффициента уменьшения дальности от
произведения коэффициента затухания и максимальной дальности действия
без затухания
Практика радиолокационного наблюдения показывает, что волны
длиннее 10 см даже при неблагоприятных метеорологических условиях
испытывают малое затухания в тропосфере. Поэтому дальность действия
𝑅
для РЛС дециметрового (L) и метрового (VHF) диапазонов из-за
затухания уменьшается незначительно.
Наибольшее затухание в атмосфере имеют волны миллиметрового (Ku)
диапазона. Поэтому он используется только в РЛС, где требуются высокие
угловые точности на небольших расстояниях. Более подробно вопрос
выбора частотного диапазона в зависимости от назначения РЛС будет
рассмотрен в подразделе 2.7
2.6.
Обзор пространства
2.6.1. Классификация способов обзора
Обзор пространства – это режим функционирования РЛС, в процессе
которого решаются задачи обнаружения целей и измерения их координат
в каждом разрешаемом элементе заданной области пространства. С точки
зрения теории информационных систем, обзор пространства РЛС требует
однозначной
связи
между
геометрическим
87
пространством
и
функциональным
дискретизацию
пространством
геометрического
радиосигнала.
пространства
Это
на
означает
разрешаемые
дальностно-угловые ячейки. В идеальном случае эта дискретизация
должна быть однозначной, непрерывной и полной. Рассмотрим основные
способы обзора пространства, используемые в радиолокации.
Радиолокационное наблюдение проводят в определенной области
пространства, которую называют рабочей зоной или зоной обзора РЛС.
Размеры зоны обзора определяются, в общем случае, заданными
интервалами, например, по азимуту Δ𝛽обз
Δ𝜀обз
𝜀
𝜀
скорости Δ𝑉
обз
, по дальности Δ𝑅обз
𝑉
𝑉
.
𝛽
𝛽
𝑅
𝑅
, по углу места
, по радиальной
Каждый из указанных интервалов
содержит определенное количество элементов разрешения по азимуту
𝑁
Δ𝛽обз /Δ𝛽,
углу места 𝑁
Δ𝑉
радиальной скорости 𝑁
разрешения
определяется
разрешения
по
всем
Δ𝜀обз /Δ𝜀, дальности 𝑁
обз /Δ𝑉 .
Общее количество элементов
произведением
параметрам
Δ𝑅обз /Δ𝑅,
количества
обзора,
т.е.
𝑁
элементов
𝑁 𝑁𝑁 𝑁 .
(Статистическая теория разрешения рассматривается в разделе 6).
Информацию о наличии целей в разных элементах разрешения рабочей
зоны получают в процессе обзора этих элементов. Очередность и время
просмотра
разных
элементов,
а
также
интенсивность
сигналов,
излучаемых РЛС при просмотре каждого элемента, определяются
используемым способом (программой) обзора рабочей зоны, выбор
которого зависит от назначения РЛС. Так, РЛС обнаружения и
целеуказания работают в режиме непрерывного обзора, в процессе
которого выполняется не только обнаружение, но и измерение координат
обнаруженных целей. В одноцелевых РЛС точного измерения координат
обзор прекращается при обнаружении цели, после чего станция
переводится в режим точного измерения координат цели.
88
Способ
обзора
выбирается
в
соответствии
с
назначением
и
особенностями применения РЛС. При этом, как правило, учитываются
такие основные факторы:
- размеры рабочей зоны;
- измеряемые координаты и точность их измерения;
- разрешающая способность РЛС по измеряемым координатам;
- необходимое время однократного обзора рабочей зоны;
- техническая реализация выбранного способа обзора.
Обзор элементов рабочей зоны выполняется последовательно во
времени (последовательный обзор) или одновременно (параллельный или
одновременный
обзор).
Применяется
также
комбинированный
(параллельно-последовательный) метод обзора. В соответствии с этим
различают
радиолокаторы
последовательного,
параллельного
и
комбинированного (смешанного) обзора. При параллельном обзоре прием
и обработка сигналов от цели осуществляются сразу же, как только эта
цель появилась в рабочей зоне. Поэтому такие РЛС в литературе иногда
называют беспоисковыми. Достоинством РЛС параллельного обзора
является высокий темп получения радиолокационной информации о целях,
находящихся в рабочей зоне, недостатком – сложность технической
реализации.
Обзор рабочей зоны по дальности 𝑅
𝑅
происходит в процессе
распространения радиосигнала с конечной скоростью до цели и обратно.
Никаких специальных операций для выполнения такого обзора при
использовании доплеровской (скоростной) фильтрации не требуется.
Радиолокационные сигналы, которые соответствуют разным элементам
разрешения
по
дальности,
поступают
на
вход
приемника
РЛС
последовательно во времени и расфильтровываются в соответствии с их
доплеровской частотой.
89
Обзор рабочей зоны по радиальной скорости необходим, если мера
разрешающей способности по доплеровской частоте ∆𝐹д (см. 1.19, 1.20)
существенно меньше диапазона возможных изменений доплеровского
сдвига частоты:
∆𝐹д ≪ 𝐹д
𝐹д
.
Как правило, обзор по скорости реализуется в каждом элементе
разрешения по дальности. В этом случае прием радиолокационных
сигналов
в
интервале
𝐹д
𝐹д
с
помощью
одного
неперестраиваемого фильтра невозможен. Для этого необходимо иметь
𝑁д
𝐹д
𝐹д
/𝐹д
неперестраиваемых
фильтров,
которые
полностью перекрывают интервал доплеровских изменений частоты
(параллельный обзор по скорости). Последовательный обзор по скорости
на основе одного перестраиваемого фильтра используется крайне редко.
2.6.2. Методы обзора пространства по угловым координатам
Обзор рабочей зоны по угловым координатам в зависимости от
количества координат подразделяется на обзор по одной или по двум
угловым координатам.
Обзор
рабочей
зоны
по
угловым
координатам
может
быть
последовательным, параллельным (одновременным) или смешанным
(комбинированным, параллельно-последовательным), что существенно
влияет на построение РЛС. Обзор является параллельным, если луч или
несколько лучей РЛС в статичном положении полностью перекрывают
рабочую зону. При одновременном обзоре РЛС должна иметь 𝑁
угловых каналов, т.е. 𝑁
𝑁 𝑁
- лучевую ДН антенны, которая перекрывает всю
зону обзора с соответствующим числом приемных каналов.
Если заданный сектор обзора достаточно узкий, то при излучении
может быть использована однолучевая ДН, которая перекрывает весь
90
сектор, а на прием может быть использована как одна, так и несколько
более узких ДН.
При условии, что сектор обзора по угловым координатам широкий и
необходима высокая разрешающая способность по угловым координатам,
количество лучей и каналов обработки становится слишком большим, а
приемная система сложнореализуемой. В этом случае применяют
последовательный или смешанный методы обзора со сканированием луча
или лучей по всей зоне обзора. Последовательный обзор пространства
часто выполняется с помощью одного луча. Как правило, при смешаном
способе обзора РЛС, обзор по углу места выполняется параллельно
несколькими лучами, а по азимуту – последовательно.
Достоинствами параллельного и смешанного обзоров по угловым
координатам является возможность за одно зондирование получить данные
об обстановке для различных угловых направлений. При этом может быть
увеличен
темп
выдачи
информации
по
сравнению
с
наиболее
распространенным в радиолокации последовательным обзором.
Последовательный обзор можно реализовать в двух вариантах (см. Рис.
2.14):
по жесткой программе, когда луч антенны РЛС перемещается
независимо от результатов локации (детерминированный).
по
гибкой
программе,
когда
обзор
программируется
в
зависимости от этих результатов (адаптивный, программный
обзор).
Рис. 2.14. Классификация последовательного обзора в зависимости от
программы обзора
В первом случае программа обзора не зависит от промежуточных
данных
радиолокационного
наблюдения,
91
во
втором
случае
она
автоматически изменяется в зависимости от результатов предыдущих
этапов обзора.
При
адаптивном
последовательном
обзоре
в
зависимости
от
результатов предыдущих этапов обзора могут изменяться или очередность
(порядок), или время просмотра рабочей зоны, или энергия сигналов,
излучаемых при просмотре ее различных элементов.
Наиболее часто в РЛС используют последовательный обзор, при
котором один луч сканирует в пределах заданного сектора (зоны) обзора.
Антенны РЛС с последовательным обзором, как правило, имеют
диаграммы
направленности
веерообразные.
В
двух
зависимости
основных
от
видов:
характера
их
игольчатые
и
перемещения
в
пространстве различают круговой, секторный, спиральный и кадровый
обзоры.
При
круговом
обзоре
один
или
несколько
лучей
полностью
перекрывают зону обзора по одной угловой координате, например, углу
места, и вращаются в азимутальной плоскости в пределах 360°.
Форме диаграммы направленности в вертикальной плоскости часто
придается вид 𝐹 𝜀
cosec 𝜀. Как было показано выше (см. п. 2.2), в этом
случае интенсивность принимаемых сигналов от идентичных целей,
которые находятся на одинаковой высоте, не будет зависеть от дальности
до РЛС.
В зависимости от угла места цели,дальность действия радиолокатора
будет
выражаться
Модификация
косекансным
уравнения
законом𝑅
дальности
рассмотрена в подразделе 2.2.
92
для
ДН
𝐻/ sin 𝜀
вида
𝐹 𝜀
𝐻 cosec ε.
cosec 𝜀
На
H
А
Б
Рис.
2.15
сечение
зоны
такого
метода
показано
видимости
обзора.
Верхняя граница АБ является
В
изовысотной,
RГ
граница БВ – изодальностной.
Р
и
а
дальняя
Подобная
форма
ДН
в
основном
используется
в
дальномерах.
При круговом
обзоре антенна вращается обычно с постоянным
количеством n A оборотов в минуту
или A 6nA угловых градусов в
секунду. При ширине ДН угловых градусов по заданному уровню
каждое направление облучается в течение времени tобл / А .
Круговой обзор может также использоваться в РЛС
с ФАР, о которых упоминалось в подразделе 1.4.4. При
этом осуществляется, например, последовательное
электронное перемещение луча ФАР по углу места, а
Рис. 2.16. Обзор
пространства в
РЛС с ФАР
по азимуту – за счет механического вращения (Рис.
2.16), что получило широкое распространение на
практике.
Достоинством РЛС с ФАР является возможность изменить технические
характеристики обзора, например, время обзора и время облучения, в
зависимости от тактической обстановки. Например, можно изменить
количество и вид зондирующих импульсов. В РЛС с ФАР часто применяют
многоэтапные, в частности двухэтапные процедуры обнаружения. На
первом этапе в большое количество угловых направлений излучается
относительно небольшое количество импульсов. При этом снижается
порог обнаружения, т.е. уменьшается коэффициент различимости 𝐾р по
сравнению с требуемым. На втором этапе только в конкретных угловых
93
направлениях, где был превышен порог (см. на Рис. 2.16 затемненные
«пятна»), излучается увеличенное количество импульсов. После их
накопления
сумма
подается
на
новый,
более
высокий
порог,
соответствующий требуемым показателям качества обнаружения. Цель
считается обнаруженной если наблюдалось превышение порога на обоих
этапах.
Возможность накопления энергии радиолокационных сигналов в
заданных направлениях при бланкировании остальных – одно из важных
достоинств ФАР.
Секторный обзор отличается от кругового тем, что луч антенны РЛС
сканирует в пределах ограниченного сектора. Например, в РЛС с
зеркальной антенной сканирование можно реализовать перемещением
облучателя или переключением нескольких облучателей.
На индикаторах РЛС секторного обзора также используют индикацию
с яркостной отметкой, но с развертыванием изображения в прямоугольных
координатах, например: “азимут – дальность”, “угол места – дальность”,
“дальность – высота”.
Примером радиолокатора секторного обзора в вертикальной плоскости
является высотомер, имеющий узкую диаграмму направленности в этой
плоскости и широкую – в горизонтальной. Высотомер измеряет угол места
𝜀ц и высоту целей 𝐻ц на дальностях 𝑅ц и азимутах 𝛽ц , полученных
дальномером.
Секторный обзор широко применяется также в РЛС с антенными
решетками.
При
этом
последовательный
обзор
пространства
осуществляется путем дискретного электронного сканирования луча ФАР
в пределах заданного сектора. Пример построчного сканирования показан
на Рис. 2.17.
Примером «построчного» секторного обзора, показанного на Рис. 2.17, может
служить обзор пространства человеческим глазом в режиме поиска. При этом роль
94
управляемых элементов в нем играют «колбочки» и «палочки», являющиеся аналогами
фазовращателей и аттенюаторов в ФАР.
При
использовании
одной
ДН
в
одноканальной системе при круговом или
секторном обзоре часто определяются две
координаты: дальность и азимут или угол
места.
Рис. 2.17.
Построчный
обзор
Такие
РЛС
двухкоординатными.
называют
В
них
радиолокационное наблюдение (обнаружение
и измерение координат цели) осуществляют с
помощью
индикаторов
кругового
обзора
(ИКО),
отображающего
координатные отметки цели.
Спиральный
представляет
метод
собой
обзора
комбинацию
вращения диаграммы направленности с
одновременным изменением угла между
Рис. 2.18.
Спиральный обзор
пространства
осью вращения и осью диаграммы (Рис.
2.18). При этом игольчатый луч быстро
перемещается
по
спирали
вокруг
оси,
образующей центр зоны обзора.
Конический метод обзора является частным случаем спирального.
Коническое сканирование чаще всего используют
в режиме точного автоматического измерения
угловых
координат
цели
равносигнальным
методом.
Антенна
Рис. 2.19. Конический обзор
пространства
РЛС
формирует
диаграмму
направленности, отклоненную от оси антенной
системы на угол𝛾, не превышающий половины ее
ширины. При вращении диаграммы направленности антенны образуется
равносигнальная ось (Рис. 2.19), совпадающая с осью антенны. При
95
отклонении оси антенны от направления на цель амплитуда принимаемого
сигнала изменяется в зависимости от мгновенного положения ДН по
синусоидальному закону с круговой частотой Ω, которая равняется
угловой скорости вращения
U m (t ) U m 0 [1 h cos(t )] .
(2.32)
Глубина модуляции ℎ будет линейно связана с величиной отклонения
(рассогласования) оси антенны от направления на цель, а фаза
гармонической огибающей импульсов – соответствовать направлению
отклонения.
характеризует
Таким
образом,
величину
и
огибающая
направление
импульсов
однозначно
отклонения
цели
от
равносигнальной линии.
Кадровый обзор достигается путем быстрого качания луча антенны
радиолокатора
по
одной
угловой
координате
(азимуту) со скоростью 0 и медленного качания
по второй (углу места). В результате луч описывает
зигзагообразную линию в пределах некоторого
кадра
Рис. 2.20. Кадровый обзор
пространства
(Рис.
одноканальный
2.20).
Если
метод
приема,
применяется
то
быстрое
движение выполняется в плоскости той угловой координаты, которую
необходимо измерять с большей точностью. Такой вид обзора обычно
используется в режиме поиска.
Если круговой и секторный обзоры являются одномерными, то
спиральный и кадровый относятся к двумерным методам обзора,
поскольку обзор ведется по двум угловыми координатами – азимуту и углу
места одновременнно.
Отметим, что в одномерном случае в расчетах используются плоские
углы, а в двумерном – телесные. Напомним, что плоские углы измеряются
отношением дуги к радиусу (радианы), а телесные – отношением площади
поверхности сферы в пределах угла к квадрату радиуса (стерадианы).
96
Недостатком механических методов сканирования являются моменты
инерции антенных устройств, которые ограничивают возможности
увеличения скорости обзора. Кроме того, обзор одной ДН (одноканальный
обзор) ограничивает время наблюдения одного направления при заданной
производительности РЛС временем, которое требуетя для обзора
пространства.
Радикального повышения скорости обзора можно достичь лишь при
использовании
многоканальных
методов
обзора
в
сочетании
с
электрическим управлением (сканирование) ДН. Такая комбинация
открывает широкие пути к реализации программного и адаптивного
обзора. В последние годы многоканальные антенные системы в виде ФАР
получили наиболее широкое распространение в РЛС.
2.6.3. Влияние способа обзора на дальность действия РЛС
Способы обзора пространства характеризуются рядом технических
характеристик. Рассмотрение начнем с последовательного кругового
обзора, который используется во многих типах РЛС. При этом
непосредственно
в
процессе
обзора
часто
реализуется
измерение
координат целей.
Предположим,
перемещаются
что
ДН
одновременно.
передающей
В
этом
и
приемной
случае
к
антенн
техническим
характеристикам обзора отнесем следующие параметры:
- число циклов обзора в единицу времени: 𝑛 (циклов/мин) или 𝑚
𝑛/60 (циклов/с) (в зависимости от значения 𝑚 различают медленный
(𝑚 ≪ 1) и быстрый (𝑚
- время
обзора
𝑡обз
1) обзор);
1/𝑚 𝑐
–
время,
в
течение
которого
осуществляется один цикл обзора;
- время облучения цели 𝑡обл :
𝑡обл
𝑡обз
Δ𝜃 ,
Δ𝜃обз
97
(2.33)
где ∆𝜃
,
– ширина ДН по уровню половинной мощности антенны,
∆𝜃обз – полный сектор обзора.
Тогда эквивалентный коэффициент усиления антенны равен
𝐺экв
4𝜋/Δ𝜃обз .
(2.34)
Заметим, что за время обзора излучаемая энергия не концентрируется
в узком секторе ∆𝜃 , , а рассредоточивается во всем секторе ∆𝜃обз . Поэтому
наряду с обычным коэффициентом усиления антенны на передачу
𝐺пер
4𝜋/∆𝜃
,
вводится
усиления. Поскольку ∆𝜃
,
понятие
«эквивалентный»
коэффициент
≪ ∆𝜃обз , то следует полагать, что 𝐺экв ≪ 𝐺пер .
Рассмотрим особенности определения дальности РЛС в режиме
обзора. Уравнения радиолокации (2.7 и 2.10) позволяют рассчитать
дальность по заданному значению энергии не только одиночного сигнала,
но и пачки импульсов. Однако величины, которые входят в эти формулы,
можно считать независимыми только для одного направления, т.е. при
отсутствии обзора. В режиме обзора по жесткой программе при
обнаружении в одном угловом направлении энергия будет зависеть от
длительности пачки, а значит – от ширины ДН и коэффициента усиления
антенны 𝐺экв .
Если количество импульсов в пачке 𝑀, а энергия каждого импульса
Эи , то в (2.10) следует положить Э
повторения
𝑡обл
импульсов,
–
Эи 𝑀
время
Эи 𝑡обл /𝑇, где 𝑇 – период
накопления
𝑀
импульсов,
соответствующее времени нахождения цели в луче. При этом количество
𝑡обз ∆𝜃 , ⁄𝑇∆𝜃обз .
накапливаемых импульсов составит 𝑀
С учетом (2.33) энергию принятого пачечного сигнала можно
представить соотношением
Э
Эи
обз экв
пер
.
По определению средней мощности (см. 1.6) 𝑃ср
следовательно, Э𝐺пер
𝑃ср 𝑡обз 𝐺экв .
98
(2.35)
𝑃и 𝜏и / 𝑇
Эи /𝑇, а,
Таким образом, уравнение радиолокации (2.10) можно преобразовать
к виду
ср обз экв аэ ср
𝑅
Эпр
р
,
.
(2.36)
Как следует из данного выражения, дальность действия при обзоре
по жесткой программе не зависит от коэффициента усиления передающей
антенны 𝐺пер . Это физически объясняется тем, что при изменении 𝐺пер
например, увеличении, одновременно изменяется (уменьшается) во
столько же раз количество и суммарная энергия импульсов пачки
вследствие сужения луча ДН. Поэтому произведение Э𝐺пер остается
неизменным. С другой стороны, дальность действия РЛС зависит от
эквивалентного коэффициента усиления антенны 𝐺экв , связанного с
величиной сектора обзора 𝜃обз соотношением (2.33). Поэтому увеличение
дальности действия РЛС при прочих равных условиях связано с
уменьшением сектора обзора при сохранении времени обзора 𝑡обз . Этот
вывод
хорошо
согласуется
с
известным
физическим
принципом:
возможности размена энергии на время наблюдения.
Согласно (2.35) дальность действия увеличивается с ростом времени
обзора 𝑡обз , поскольку при заданной частоте повторения импульсов это
ведет к увеличению количества импульсов в пачке. Однако увеличение 𝑡обз
означает уменьшение темпа выдачи данных, что в ряде случаев
недопустимо.
Из (2.35) также следует, что дальность действия при обзоре
определяется не импульсной 𝑃 , а средней мощностью передатчика 𝑃ср .
Соотношение (2.35) имеет важное практическое значение при сравнении
РЛС, которые отличаются способами обзора пространства.
2.7.
Обзор пространства в РЛС с ФАР
99
Применение многоканальных антенн типа ФАР, несмотря на
несомненные технические сложности, всегда обосновывалось требованием
повысить темп обзора пространство по сравнению с механическим
вращением.
В
первую
очередь,
это
определяется
возможностями
электронного (практически безынерционного) переброса луча в заданное
угловое направление и многолучевого диаграммообразования (причем
теоретически количество формируемых лучей ограничивается только
числом элементов в апертуре).
В РЛС с ФАР основное распространение получили два способа
обзора: последовательный и параллельный, а иногда, при широкой зоне –
их
комбинирование.
В
последнем
случае
часть
зоны
(подзона)
осматривается параллельно, а переход от подзоны к подзоне –
последовательно. Рассмотрим оба способа применительно к линейной
эквивалентной ФАР с шагом 𝑑, который должен удовлетворять условию
отсутствия дифракционных максимумов (однозначности) в угловой
области видимости: 𝑑
𝜆/ 1
|𝑠𝑖𝑛Δ𝜃обз /2| . При этом количество
элементов в решетке M должно соответствовать критерию 𝑀
Δ𝜃обз /Δ𝜃
,
(подробные сведения о ФАР приводятся в курсе «Антенны и СВЧ –
устройства»).
При последовательном обзоре, как правило, используются узкие,
одинаковые на прием и передачу лучи. При параллельном – широкая ДН
на передачу, «заполненная» веером узких лучей на прием. Поэтому для
последовательного обзора характерны увеличенные временные затраты на
обзор, а для параллельного – возможны «провалы» в зоне на «стыках»
приемных лучей и снижение усиления в режиме излучения.
При использовании ФАР, показанной на Рис. 2.21, последовательный
обзор реализуется за счет управления фазовращателями (ФВ) по заданной
программе. Отметим, что ширина парциальных ДН излучателей ФАР ∆θиз
должна быть согласована с зоной обзора, т.е. ∆θиз
100
∆θобз в каждой
плоскости. Тогда узкий луч, образованный при когерентном суммировании
«канальных»
сигналов
может
сканировать
внутри
этого
сектора
практически без потерь (Рис. 2.22).
θ
1
2
3
...
Парциальная ДН
излучателя
M
d
Блок
управления
ФВ
Δθиз
...
ФВ
θ обз min
θ0
0
θ обз max
Σ
Рис. 2.21. ФАР с последовательным сканированием узким лучом.
F(0)
0
θобз min
Δθn
Последовательное
положение лучей
θобз max
θ
Рис. 2.22. Последовательное сканирование в ФАР
Пусть в каждом угловом направлении узкая приемопередающая ДН
находится в течение времени: ∆𝑡
𝑁Т, где 𝑁–число импульсов,
Т–однозначный период повторения. После накопления 𝑁
элементной
пачки ДН перемещается в следующее угловое направление (например, с
шагом ∆θ
,
, т.е. через ширину луча по уровню минус 3 дБ). Тогда при
заданных дальности 𝑅
, секторе обзора ∆θобз и времени обзора 𝑡обз
(производительности РЛС) на максимально возможное количество
101
когерентно
накапливаемых
𝑁
импульсов
в
каждом
угловом
направлении накладывается ограничение
обз ∆
𝑁
Например, при 𝑅
∆θобз
100°, из
(2.36)
,
∆
обз
.
150 км, 𝑇
получим:
(2.37)
10 с, ∆θ
𝑁
5.
,
Такое
1 и 𝑡обз
0,5 с,
ограничение
в
радиолокации получило название «импульсный голод», который тем
острее, чем больше 𝑅
и шире ∆θобз , и чем меньше заданное время
обзора 𝑡обз . Для борьбы с этим эффектом можно уменьшить период
повторения 𝑇, что повлияет на неоднозначность по дальности (см 1.8), либо
расширить луч ∆θ
,
, что эквивалентно снижению усиления антенны
𝐺пер и 𝐺пр в (2.8).
В свою очередь, реализация параллельного обзора, как правило,
базируется на применении относительно слабонаправленной антенны
(СНА) на передачу и многолучевой антенной решетки (МАР) на прием
(Рис. 2.23).В этой схеме на передачу сигнал от генератора распределяется
между
излучателями
через
фиксированные
ФВ,
обеспечивающие
согласование (расширение) луча решетки с заданной зоной обзора ∆θобз .
На прием через циркуляторы (Ц) сигналы каналов поступающей на вход
диаграммообразующей схемы МАР. В ней за счет набора фазовых
распределений формируется веер лучей, показанный в верхней части
рисунка. Теория МАР построена на основе определения коэффициента
ортогональности (корреляции) между i-ой и j-ой ДН 𝜌 в веере лучей с
различной пространственной ориентацией
𝜌
𝐹 𝜃 𝐹 ∗ 𝜃 cos 𝜃 𝑑Ω
4𝜋
𝐺 𝑖
0
𝑖
𝑗
,
𝑗
(2.38)
где Ω – телесный угол, в котором сосредоточены ДН.
Примером ортогональных ДН в линейной МАР, когда 𝜌
служить веер лучей с i-ой ДН вида 𝐹 𝑢
102
sinc u
0 может
iπ , где sinc 𝑥
sin 𝑥 /𝑥, 𝑢
𝜋𝑑𝑀𝑠𝑖𝑛Θ/𝜆 – обобщенная координата. Ориентацияi-го луча
arcsin 𝑖𝜆/𝑀𝑑 .
должна удовлетворять соотношению Θ
Достоинством параллельного обзора в РЛС с ФАР, точнее с МАР, на
примем, являются теоретическое снятие ограничения (2.35) на количество
накапливаемых импульсов, а также отсутствие управляемых ФВ в решетке.
Однако, возможность когерентного накопления большого количества
импульсов при параллельном обзоре ограничивает интервал когерентности
флюктуирующих целей Δ𝑡ц ког . В схеме на Рис. 2.23 в качестве
диаграмнообразующих схем могут использоваться известные из теории
антенн матрицы (Бласса, Максона, Батлера и тд).
Δθобз
1
2
𝜑1
3
𝜑2
Ц
М
𝜑3
Ц
𝜑𝑀
Ц
Ц
1:M
~
Диаграммообразующая схема МАР (Матрица
Батлера)
1
2
3
М
М лучей
Рис. 2.23. Схема приемо-передающей решетки РЛС параллельного обзора.
103
Формулирование веера ортогональных лучей вида (2.37) удобно
проиллюстрировать на основе параллельной матрицы Батлера, показанной
на Рис. 2.24а при М = 4. На этом же рисунке показаны значения фаз для
формирования одного излучения. В этой схеме с использованием 3 дБ
направленных ответвителей и фазовращателей на 45˚ формируются 4 луча
МАР. Аналоговая реализация матрицы Батлера при большом числе
излучателей в МАР может вызвать существенные затруднения.
В последнее время в связи с развитием цифровой техники все
большее распространение получает цифровая технология формирования
ДН. Схему на Рис. 2.24б можно рассматривать как 4х-точечный граф БПФ,
если полагать вектор 𝑦
‖𝑦 𝑦 𝑦 𝑦 ‖ оцифрованными сигналами на выходе
излучателей (первичных каналов) МАР. Тогда матрицу Батлера (рис.)
можно рассматривать как граф БПФ преобразования, где отсчеты
первичных каналов преобразуются в отсчеты вторичных каналов (лучей)
(Рис. 2.24б) Общая формула БПФ преобразования для получения l-ого луча
имеет вид:
𝐹 𝜃
exp
где 𝑊
𝑦 𝑒𝑥𝑝
𝑗
𝑗
формулу
показанной на Рис. 2.24 при 𝑊
1 1
1 𝑊
1 𝑊
1 𝑊
Полученный
𝑦 𝑊
,
(2.39)
– оператор свертки
Конкретизируем
𝑔
𝑔
𝑔
𝑔
2𝜋𝑙𝑚
𝑀
1
𝑊
𝑊
𝑊
результат
2.38
exp
1
𝑊
𝑊
𝑊
для
4х
элементной
решетки,
𝑗
𝑦
𝑦
𝑦
𝑦
полностью
диаграммообразования на Рис. 2.24а.
104
1
1
1
1
1
𝑗
1
𝑗
1
𝑗
𝑗
𝑗
1
1
1
1
совпадает
с
𝑦
𝑦
𝑦
𝑦
результатами
1L° 1L-135°
1L-270° 1L-405°
y0
y0 + y2
g0 = (y0 + y2) + (y1 + y3)
Направленный
ответвитель 3 дБ
∑
∑
y1
Δ
Δ
√2L-135°
g1 = (y0 ‐ y2) ‐ j(y1 ‐ y3)
45°
g2 = (y0 + y2) ‐ (y1 ‐ y3)
y2
45°
Фиксированный
фазосдвигатель
Δ
∑
y3
g3 = (y0 + y2) + j(y1 ‐ y3)
xj
0
√2L-135°
1-й
2-й
правый левый
луч
луч
0
0
2-й
1-й
правый левый
луч
луч
а)
б)
Рис. 2.24. Матрица Батлера при M = 4 а) и ее цифровой эквивалент б)
(граф БПФ)
Если ДН на передачу будет недостаточно широкой, т.е. уже ∆Θобз , а
приемными лучами не удается перекрыть всю зону, то целесообразен
комбинированный
обзор.
Это
означает,
что
параллельный
дополняется последовательным, но с шагом не ∆θ
,
, а 𝑚∆θ
,
обзор
, где 𝑚 –
число лучей МАР. Естественно, что при этом в 𝑚 раз сокращается время
обзора, по сравнению с требуемым для последовательного обзора «луч в
луч».
Плоские ФАР могут реализовать как одномерное, так и двумерное
сканирование, но чаще они используются для «мгновенного» переброса
луча в произвольное угловое направление θ , 𝜑
,
и поэтому луч должен
иметь возможность перемещаться в двух плоскостях. В режиме обзора в
плоской ФАР чаще всего используется строчно-столбцевой принцип
фазирования. Расчет фаз осуществляется в показанной на Рис. 2.25
сферической системе координат, связанной с плоскостью ФАР.
Для того, чтобы направить луч в направление θ , 𝜑
необходимо,
чтобы в излучателе плоскости решетки в m, n-ом излучателе было
реализовано следующее значение фазы:
105
𝜑
𝜑
,
2𝜋𝑑𝑥
𝑚 sin θ cos 𝜑
𝜆
Δ𝜑
2𝜋
sin 𝜃 𝑑 𝑚 cos 𝜑
𝜆
2𝜋𝑑𝑦
𝑛 sin θ sin 𝜑
𝜆
(2.40)
𝑑 𝑛 sin 𝜑 ,
т.е. фаза должна иметь две составляющие. Первое слагаемое показывает,
что во всех строках излучатели с номером m получают одинаковую фазу.
Фазовая добавка за счет номера𝑛 этого излучателя в столбце определяется
вторым слагаемым. Фазирование, естественно, допускает и обратный
порядок.
z
0
y
θ0
dx
y
dy
1
2
1
3
2
3
4
4
x
φ0
M N
x|
Рис. 2.25. Пояснение к принципу фазирования плоской ФАР
2.8.
Частотные диапазоны РЛС
Для активных РЛС выбор рабочих диапазонов частот (длины волны)
является основополагающим фактором с точки зрения выполнения ТТХ по
назначению. В других типах РЛС, например, во вторичных радиолокаторах
с активным ответом частотный диапазон заранее регламентируется, в том
числе, международными соглашениями, и поэтому задача его выбора не
стоит.
При выборе частотного диапазона для активных РЛС следует учесть
ряд часто противоречивых факторов. К их числу относятся:
- возможность работы в заданных погодных условиях;
- значения ЭПР целей, предназначенных для наблюдения;
106
- требуемая
разрешающая
способность
и
точностные
характеристики с учетом конструктивных ограничений на
размеры антенной системы;
- чувствительность к доплеровскому сдвигу частоты;
- электромагнитная совместимость с другими радиоэлектронными
средствами на позиции;
- готовность СВЧ и цифровой элементной базы.
С учетом этих факторов и широкого спектра применений в
радиолокации используются радиоволны с частотой от нескольких единиц
МГц до оптического диапазона
𝑓
3 ∙ 10 МГц 𝜆
10 м . Однако
подавляющее большинство РЛС разрабатываются и работают в диапазоне
частот от 400 МГц до 30 ГГц. Согласно международному стандарту все
частотные
диапазоны
имеют
буквенные
обозначения,
которые
используются в научно-технической литературе со времен Второй
мировой войны.
В таблицу 2.1 сведена буквенная идентификация частотных
диапазонов в редакции 1984 года, рекомендованная Международным
Телекоммуникационным Союзом (ITU). Заметим, что внутри приведенных
в табл. 2.1 диапазонов выделены сравнительно небольшие поддиапазоны
функционирования радиолокационных средств.
Таблица 2.1
№
Буквенные
Диапазон
обозначения
частот
Поддиапазон
для
Примечания
радиолокации
Официально
1
HF
3 –30 МГц
–
рекомендованных
частот для РЛС нет.
2
VHF
30 – 300 МГц
138 – 144 МГц
216 – 225 МГц
107
–
* – иногда называют
3
UHF
300 – 1000 МГц
420 – 450* МГц
890 – 942** МГц
P диапазон
** – иногда
включают в L
диапазон
Рекомендовано
4
L
1000 – 2000 МГц
1215 – 1400 МГц
ICAOдля трассовых
РЛС УВД
Рекомендовано
5
S
2000 – 4000 МГц
2300 – 2500 МГц
ICAOдля
2700 – 3700 МГц
аэропортовых РЛС
УВД
Универсальный
6
C
4000 – 8000 МГц
5250 – 5925 МГц
диапазон для
метеорадиолокаторов
8000 – 12000
7
X
8
Ku
12 – 18 ГГц
9
K
18 – 27 ГГц
24,05 – 24,25 ГГц
10
Ka
27 – 40 ГГц
33,4 –36 ГГц
11
V
40 – 75 ГГц
59 – 64 ГГц
12
W
75 – 110 ГГц
МГц
8500 – 10680 МГц
13,4 – 14 ГГц
15,7 – 17,7 ГГц
76 – 81 ГГц
92 – 100 ГГц
126 – 142 ГГц
13
mm
(миллиметровый)
110 – 360 ГГц
144 – 149 ГГц
231 – 235 ГГц
238 – 248 ГГц
Поддиапазон 330 –
360 ГГц
«субмиллиметровый»
При проектировании РЛС выбор того или иного частотного
диапазона всегда является комплексной задачей, а ее решение –
компромиссом между вышеназванными факторами. Поясним это на
примере всепогодной РЛС.
В данном разделе показано, что при работе в условиях дождя
значение затухания РВ (𝛼дБ ) существенно зависит от частоты 𝑓.
108
Эмпирически
𝛼, дБ~𝑘 𝑓
,
эту
зависимость
можно
аппроксимировать
законом
, где 𝑘 – постоянный коэффициент. Кроме того, зависимость
степени поглощения в каплях и частицах гидрометеоров от частоты еще
более сильная и пропорциональна ~𝑓 . Очевидно, что с целью
минимизации потерь РВ в атмосфере для всепогодных РЛС целесообразно
выбрать диапазон с максимально возможной длиной волны.
С другой стороны, как показано в разделе 1, разрешающая
способность и точностные характеристики РЛС имеют обратную по
отношению к частоте зависимость. Это означает, что эти характеристики
тем лучше, чем выше частота 𝑓. Например, при фиксированном размере
𝐿
антенны
координатам
𝐿
размеры
обратно
элементов
пропорциональны
разрешения
частоте.
С
по
угловым
точки
зрения
разрешения по дальности заданная мгновенная ширина полосы сигнала Δ𝑓и
проще реализуется при выборе наиболее высокой несущей 𝑓 . Например,
сигнал с полосой Δ𝑓и
10 МГц на несущей 𝑓
широкополосным, а при 𝑓
100 МГц, является
1000 МГц – узкополосным. Таким образом,
можно считать, что если для РЛС заданы размеры ячеек разрешения по
всем
координатам,
то
предпочтение
следует
отдать
наиболее
коротковолновому диапазону. В таблицу 2.2 сведены данные о назначении,
областях применения и сравнительных качественных характеристиках
РЛС различных частотных диапазонов.
Таблица 2.2
Частотн
№
ый
Назначение и область
Разрешение
диапазо
применения
и точность
Загоризонтные РЛС
обнаружения большой
дальности.
Наблюдение за целями
над морской
поверхностью
Низкие
н
1
HF
3 – 30
МГц
109
Чувствительност
ьк
метеоусловиям
Нет зависимости
от 𝑓
Примечание
2
3
VHF
30 – 300
МГц
UHF
300 –
1000
МГц
4
L
1000 –
2000
МГц
5
S
2000 –
4000
МГц
6
C
4000 –
8000
МГц
7
X
8000 –
12000
МГц
8
Ku
12 – 18
ГГц
9
K
18 – 27
ГГц
РЛС обнаружения
прямой видимости
очень большой
дальности
РЛС обнаружения
большой дальности (до
400 км).
Трассовые обзорные
РЛС систем УВД
РЛС обнаружения
средней дальности (от
100 до 200 км).
Аэродромные РЛС
системы УВД.
Метеорадиолокаторы*
РЛС обнаружения
малой дальности (до
100 км) и
сопровождения
средней дальности (до
70 км).
Универсальные
метеорадиолокаторы*
наземного и бортового
базирования
РЛС* обнаружения
малой дальности;
РЛС наведения
огневых средств;
РЛС посадки в районе
аэропортов системы
УВД;
РЛС
картографирования;
Метеорадиолокаторы*
*
Высокоразрешающие
РЛС
картографирования со
спутников
Средние
Не
чувствительны
Средние
Слабая
чувствительность
Средние
Чувствительны к
сильным осадкам
*Для южных
широт с
сильными
отражениями от
метео
Выше
средних
Чувствительны к
средним осадкам
*для любых
широт
Чувствительны
ко всем видам
осадков
*Работают в
основном в
ясную погоду. В
осадках
дальность падает
**Для северных
и средних широт
Очень высокая
Все диапазоны
«K»
используются
для получения
радиоизображени
й на малых
дальностях в
Высокие
Очень
высокие
Практически не
используется
110
10
11
12
13
Ka
27 – 40
ГГц
V
40 – 75
ГГц
W
75 – 110
ГГц
MM
110 –
360 ГГц
Высокоразрешающие
РЛС
картографирования;
РЛС сопровождения
для очень малых
дальностей;
РЛС обзора летного
поля на аэродромах
Высокоточные
радиолокационные
сенсоры;
интеллектуальное
личное оборудование
военных
Экспериментальное
оборудование;
Высокочувствительные
радиолокационные
сенсоры
ясную погоду в
первую очередь в
бортовых РЛС с
синтезированной
апертурой
Используются в
компактной
аппаратуре с
антеннами малых
размеров,
например, в
головках
самонаводящихся
ракет
Отметим, что использованные в табл. 2.2 понятия: «большая, средняя
и малая дальности», а также «плохое и высокое разрешение» достаточно
условны и являются ситуационными, так как при проектировании они
зависят от задачи, решаемой РЛС. Из данных табл. 2.2 отчетливо видна
тенденция – чем ниже рабочая частота, тем больше дальность действия и
выше устойчивость к погодным условиям. При этом разрешающая
способность и точностные характеристики могут оказаться недостаточно
высокими.
Глобальный компромисс между энергетикой РЛС и качеством
доставляемой информации свелся к тому, что подавляющее число
радиолокационных средств создавались и вновь разрабатываются в
основном в L, S и X диапазонах волн. В других диапазонах создаются РЛС
для специфических задач, и поэтому они не являются массовыми.
111
3. ОДНОКАНАЛЬНОЕ ОБНАРУЖЕНИЕ РАДИОЛОКАЦИОННЫХ
СИГНАЛОВ НА ФОНЕ НЕКОРРЕЛИРОВАННЫХ
СТАЦИОНАРНЫХ ГАУССОВСКИХ ПОМЕХ
Рассматривается первый этап радиолокационного наблюдения – задача
обнаружения одной радиолокационной цели при одноканальном приеме отраженного
от нее сигнала на фоне некоррелированных стационарных гауссовских помех
(внутренних шумов и шумов окружающего пространства: атмосферы, космоса, Земли).
Многоцелевые ситуации могут быть сведены к совокупности одноцелевых, когда все
цели расположены в разных разрешаемых объемах. Как было показано в разделе 2,
оптимизация этапа обнаружения является важнейшей для определения дальности
действия РЛС во всех ситуациях. Этап обнаружения рассматривается для когерентных
и некогерентных сигналов в статистической постановке, а синтез устройства
обработки проводится на основе отношения правдоподобия с учетом случайного
характера параметров сигнала.
3.1.
Критерии оптимальности и показатели качества
обнаружения.
Обнаружение состоит в принятии решении о наличии или отсутствии
цели
в
выделенном
обнаружения.
Задача
для
наблюдения
обнаружения
разрешаемом
цели
объеме
трактуется
как
зоны
задача
обнаружения радиолокационного сигнала.
Пусть
совмещенный
импульсный
радиолокатор
облучает
выделенный разрешаемый(импульсный) объем (Рис. 3.1). В результате
решения задачи обнаружения должно быть принято решение о наличии или
отсутствии цели в этом объеме.
импульсный
объем
Передатчик
1
Â
0
y (t )
АП
Приемник
РУ
Рис. 3.1. К постановке задачи обнаружения
Информация о наличии или отсутствии цели содержится в принятом
колебании 𝑦 𝑡 . При условии отсутствия цели в импульсном объеме
колебание𝑦 𝑡 определяется только помехой 𝑛 𝑡 , т.е.𝑦 𝑡
условии наличия цели - 𝑦 𝑡
𝑥 𝑡
𝑛 𝑡 , а при
𝑛 𝑡 – смесью полезного сигнала 𝑥 𝑡
112
и помехи (для простоты в обоих случаях параметры сигнала и помехи
опущены).
Помеха 𝑛 𝑡 и принимаемое колебание 𝑦 𝑡
представляют собой
случайные процессы. Несмотря на то, что на входе приемника имеет место
одна конкретная реализация принимаемого колебания 𝑦 𝑡 ,необходимо
синтезироватьобнаружитель,
оптимальный
в
среднем
по
всем
реализациям, т.е. оптимальный для случайного процесса в целом (здесь и
далее
случайный
процесс
и
его
реализация
будут
обозначаться
одинаковыми буквами).
Условия отсутствия и наличия полезного сигнала в смеси можно
объединить в виде
𝑦 𝑡
𝐴𝑥 𝑡
𝑛 𝑡 ,
(3.1)
где 𝐴 – дискретный параметр, который может принимать два
значения
𝐴
𝐴
𝐴
1 при условии "цель есть",
0 при условии "цели нет".
Значение 𝐴 заранее неизвестно, а условия 𝐴 и 𝐴 часто называют
гипотезами Н и Н соответственно. В процессе обнаружения на основе
анализа реализации 𝑦 𝑡 при каждом условии параметру 𝐴 (из-за наличия
помех) может приписываться одно решение из двух возможных
𝐴
𝐴
𝐴
1 при решении "цель есть",
0 при решении "цели нет".
(3.2)
Иначе говоря, устанавливается, какая из гипотез: H1 или H0 наиболее
вероятна. Поэтому процедуру обнаружения иногда считают проверкой
статистических гипотез.
Устройство, в котором принимается это решение, называется
решающим устройством (РУ). Вход РУ подключен к выходу приемника,
где принятые колебания 𝑦 𝑡 подвергаются преобразованиям, характер
которых следует установить из оптимизации задачи обнаружения.
113
Решение 𝐴
𝐴 𝑦 𝑡 однозначно зависит от принимаемого колебания
𝑦 𝑡 и сводится к установлению наличия или отсутствия в нем сигнала
𝑥 𝑡 . Поскольку 𝐴 может принимать только два значения, то такой
обнаружитель
существуют
называется
и
двухальтернативным.
многоальтернативные
Кроме
обнаружители.
него
В
также
частности,
трёхальтернативный обнаружитель помимо ответов «да» и «нет» может
выдавать ответ «не знаю», что потребует реализации дополнительных
процедур
обнаружения.
Дальнейшее
рассмотрение
ограничим
двухальтернативным обнаружителем.
При
обнаружении
возможны
четыре
ситуации
совмещения
случайных событий “решения” и “условия”, две из которых 𝛢 𝛢 и 𝛢 𝛢
являются правильными, а две 𝛢 𝛢 и 𝛢 𝛢 – ошибочными.Напомним, что
ошибочные ситуации обусловлены наличием в принимаемом колебании
𝑦 𝑡 аддитивных и/или модулирующих помех. Указанные ситуации имеют
названия:
𝛢 𝛢 – правильное обнаружение,
𝛢 𝛢 – пропуск цели (сигнала),
𝛢 𝛢 – ложная тревога,
𝛢 𝛢 – правильное необнаружение.
Этим ситуациям соответствует четыре вероятности совмещения
событий, сумма которых равна единице:
𝛲 𝛢 𝛢
𝛲 𝛢 𝛢
𝛲 𝛢 𝛢
𝛲 𝛢 𝛢
1.
(3.3)
Это означает, что (3.3) описывает полную систему событий. В
статистической теории обнаружения ложную тревогу с вероятностью
𝛲 𝛢 𝛢
называют также ошибкой первого рода, а ситуацию пропуска цели
с вероятностью 𝛲 𝛢 𝛢
– ошибкой второго рода.
Необходимо определить такой способ обработки 𝑦 𝑡 , чтобы
ошибочных решений при многократном повторении эксперимента было
как можно меньше.
114
Каждому ошибочному решению ставят в соответствие некоторую
плату – стоимость ошибки 𝑟 𝑖, 𝑗
0,1 :
𝑟 – стоимость ошибки первого рода,
𝑟
– стоимость ошибки второго рода.
Для безошибочных решений плату полагают равной нулю 𝑟
𝑟
0. При этом систему обнаружения характеризуют средней платой 𝑟ср
(математическим ожиданием платы 𝛭 𝑟 ), т.е. средним риском ошибочных
решений
𝑟ср
𝛭𝑟
𝑟 𝛲 𝛢𝛢
𝑟 𝛲 𝛢 𝛢
𝑟 𝛲 𝛢 𝛢 .
(3.4)
В такой постановке в качестве критерия оптимальности принимают
байесовский критерий минимума среднего риска
𝑟ср
𝑟 𝛲 𝛢 𝛢
𝑟 𝛲 𝛢 𝛢
𝑚𝑖𝑛,
(3.5)
который является наиболее универсальным среди методов статистической
оптимизации.
В
соответствии
с
этим
критерием,
наилучшим
из
сравниваемых обнаружителей можно считать обнаружитель, который
обеспечивает минимум среднего риска.
Критерии минимума среднего риска широко используются в повседневной
жизни. Например, если мы собираемся на машине доехать из пункта A в пункт B, то
выбираем маршрут, на котором риск нарушений правил в среднем минимален. Причём
в этом случае плата за каждое нарушение точно известна, т.к. представляет собой
штраф, регламентируемый Гражданским кодексом. Для радиолокации такой кодекс
отсутствует. Поэтому здесь плата за ошибки ситуационна и зависит от задач,
решаемых РЛС.
Пользуясь правилом умножения вероятностей, выражение среднего
риска (3.5) представим в виде
𝑟ср
где 𝛲 𝛢 , 𝛲 𝛢
𝑟 𝛲 𝛢 𝑃 𝛢 ⁄𝛢
𝑟 𝛲 𝛢 𝑃 𝛢 ⁄𝛢 ,
(3.6)
– априорные (безусловные) вероятности наличия и
отсутствия сигнала 𝑥 𝑡
вероятности 𝑃 𝐴 /𝐴
в принимаемом колебании 𝑦 𝑡 , а условные
характеризуют ошибочные решения:
𝛲 𝛢 /𝛢
𝐷
– условная вероятность пропуска цели;
115
(3.7)
𝛲 𝛢 /𝛢
𝐹
(3.8)
– условная вероятность ложной тревоги.
С учетом (3.7) и (3.8) выражение для среднего риска можно
представить в виде
𝑟ср
𝑟 𝐷𝛲 𝛢
𝑟 𝐹𝛲 𝐴
(3.9)
При условии наличия полезного сигнала в 𝑦 𝑡 могут быть приняты
два взаимоисключающих решения Α
и Α , и поэтому сумма их
вероятностей равна единице
𝐷
𝐷
1, 𝐷
𝛲 𝛢 /𝛢 ,
(3.10)
где 𝐷– условная вероятность правильного обнаружения.
Априорные вероятности наличия 𝑃 𝐴
или отсутствия 𝑃 𝐴
цели
обычно носят субъективный характер или неизвестны. Условные же
вероятности ложной тревоги 𝐹 и правильного обнаружения 𝐷 могут быть
оценены экспериментально или путем расчета. Поэтому 𝐹 и 𝐷, а не
𝛲 𝛢 ,𝛢
и 𝛲 𝛢 , 𝛢 , используют как показатели качества обнаружения,
на которые были ссылки в разделе 2 при определении дальности
обнаружения.
Следует учитывать, что последствия ошибочных решений в общем
случае разные. Так, при радиолокационном наблюдении ситуации
пропуска цели и ложной тревоги не равноценны, и поэтому 𝑟
𝑟 .
Теперь перейдем к оптимизации радиолокационного обнаружения,
т.е. к определению оптимального решающего правила. Для этого
представим соотношение (3.9) в виде
𝑟ср
𝑟 𝑃 𝐴
𝐷
𝑙 𝐹 ,𝑙
(3.11)
В (3.11) 𝑙 – весовой множитель, зависящий от отношения стоимостей
ошибок и априорных вероятностей наличия 𝑃 𝐴
в разрешаемом объеме. Учитывая, что 𝑟 𝑃 𝐴
и отсутствия 𝑃 𝐴
цели
0 всегда, критерий
оптимизации по минимуму среднего риска сводят к весовому критерию
116
𝐷
𝑙 𝐹
𝑚𝑖𝑛. Поскольку 𝐷
1
𝐷, то весовой критерий преобразуется к
виду
𝐷
𝑙 𝐹
𝑚𝑎𝑥.
(3.12)
Согласно этому критерию оптимальный обнаружитель обеспечивает
максимум взвешенной разности 𝐷
𝑙 𝐹.
С позиций (3.12) получим оптимальное в статическом смысле
правило принятия решений “цель есть” и “цели нет”.
В дальнейшем будем пользоваться не только аналитической записью
входной смеси 𝑦 𝑡 , но и её дискретным представлением. Это означает, что
колебание 𝑦 𝑡 представляется 𝐿-мерным вектором-столбцом временных
отсчетов 𝒚 𝑡
|| 𝑦 𝑦 … 𝑦 || (здесь и далее матрицы и вектора любых
размеров будут обозначаться жирными буквами). Для удобства записи в
некоторых
случаях
вектор-столбцы
транспонированные вектор-строки.
𝑦
𝑦
‖𝑦 𝑦
𝒚
⋮
𝑦
…
удобно
представлять
𝑦 ‖Т
как
(3.13)
Оптимальное решающее правило задается решающей функцией 𝐴 𝒚 ,
зависящей от вектора отсчетов 𝒚 принимаемого колебания. Она принимает
дискретные значения 1 и 0, соответствующие решениям о наличии или
отсутствии сигнала в принимаемом колебании. Проводя оптимизацию по
весовому критерию, свяжем входящие в (3.12) условные вероятности 𝐷 и
𝐹 с плотностями вероятности при условиях наличия 𝑝сп 𝒚
отсутствия 𝑝п 𝒚
𝑝 𝒚/𝐴
𝑝 𝒚/𝐴
и
сигнала. Будем полагать эти плотности
известными и тем самым учтем статистические модели сигнала и помехи
(рис. 3.2).
117
y1
Aˆ ( y ) 1
Aˆ ( y ) 0
цели нет
p cп ( y 1 , y 2 ) const
цель есть
p cп ( y )
pп( y)
Aˆ ( y 1 , y 2 ) 0
D
F
0
y0
х
Aˆ ( y 1 , y 2 ) 1
y2
y
Aˆ ( y )
p п ( y 1 , y 2 ) const
0
y0
y
а
б
Рис. 3.2. Одномерные плотности вероятности (а) и сечения двумерных
плотностей вероятности (б)
В приведенном на Рис. 3.2 одномерном 𝑦 и двумерном 𝒚
случаях решающая функция 𝐴 𝒚
разбивает прямую (Рис. 3.2, а) и
плоскость (рис. 3.2, б) на области принятия решений: 𝛢
𝛢
и
0 (“цели нет”). На Рис. 3.2 учтено, что 𝑝сп 𝑦
𝑝сп 𝑦 , 𝑦
𝑝п 𝑦
детерминированного
𝑥 ,𝑦
𝑥
сигнала
‖𝑦 𝑦 ‖
(Рис.
с
3.2,
1 (“цель есть”) и
𝑝п 𝑦
б),
𝑥 (рис. 3.2, а)
т.е.
фиксированными
при
наличии
параметрами
в
принимаемом колебании распределение 𝒚 не изменяется, а только
смещается на величину 𝒙.
3.2.
Отношение правдоподобия. Критерий Неймана-Пирсона.
Условные вероятности 𝐷 и 𝐹 определяются путем интегрирования
условных плотностей вероятности 𝑝сп 𝒚 и 𝑝п 𝒚 по многомерной области
𝐴 𝒚
1. Так, для одномерного случая (рис. 3.2, а) имеем
𝐷
𝑝сп 𝑦 𝑑𝑦,
𝐹
𝑝п 𝑦 𝑑𝑦.
(3.14)
Эти вероятности имеют смысл вероятностей попадания случайной
величины 𝑦 в интервал 𝑦
𝑦 (𝑦 – пороговое значение) при условиях
воздействия сигнала и помехи или только помехи. Согласно (3.14)
118
значения 𝐷и 𝐹 соответствуют заштрихованным площадям под кривыми
𝑝сп 𝑦 и 𝑝п 𝑦 (рис. 3.2 ,а) правее порогового значения 𝑦 .
Общую область интегрирования можно расширить до области
возможных значений 𝒚, если в качестве сомножителя подынтегрального
выражения ввести решающую функцию 𝐴 𝒚 , равную единице для
значений 𝒚
𝑦 и нулю при 𝒚
𝐴 𝒚 𝑝сп 𝒚 𝑑𝑉 ,
𝐷
где 𝑑𝑉
𝑦 . Тогда 3.14 перепишем в виде
𝐴 𝒚 𝑝п 𝒚 𝑑𝑉 ,
𝐹
(3.15)
𝑑𝑦 𝑑𝑦 . . . 𝑑𝑦 , 𝑉у – объем многомерного пространства𝒚.
В соответствии с весовым критерием (3.12) с учетом (3.15),
максимизируемая разность 𝐷
𝐷
𝑙 𝐹
𝑙 𝐹 может быть представлена в виде
𝐴 𝒚 𝑝п 𝒚 𝑙 𝒚
𝑙 𝒚
𝑙 𝑑𝑉
(3.16)
𝑝п 𝒚
,
𝑝п 𝒚
(3.17)
где 𝑙 𝒚 – отношение правдоподобия.
Для обеспечения максимума интеграла (3.16), т.е. для оптимизации
обнаружения, достаточно для каждого 𝒚 добиться наибольшего значения
подынтегрального выражения за счет выбора решающей функции 𝐴 𝒚 .
Поскольку эта функция принимает только два значения 0 и 1, а 𝑝п 𝒚
0
всегда, подынтегральное выражение либо обращается в нуль, либо
умножается на единицу. Поэтому, если разность 𝑙 𝒚
то решающая функция 𝐴 𝒚
разность отрицательна, то 𝐴 𝒚
𝑙
положительна,
должна равняться единице. Если же эта
0
Таким образом, оптимальное решающее правило может быть
записано в виде
𝐴опт 𝒚
Величину 𝑙
1, если 𝑙 𝒚
0, если 𝑙 𝒚
𝑙 ,
𝑙 .
(3.18)
называют порогом обнаружения. Его значения
определяются выражением (3.12). В соответствии с (3.18) в оптимальном
119
обнаружителе принимается решение “цель есть”, если отношение
правдоподобия 𝑙 𝒚
больше (или равно) порогового значения 𝑙 , в
противном случае 𝑙 𝒚
𝑙 принимается решение “цели нет”.
Правилу (3.18) соответствует структурная схема оптимального
обнаружителя, которая представлена на рис. 3.3. Он состоит из
вычислительного (ВУ) и порогового (ПУ)
устройств. На рис. 3.3 и далее двойные
линии
Рис. 3.3. Оптимальный
обнаружитель
вектор
отсчетов
означают
величин
(или
подачу
векторных
матриц).
На
вход
вычислительного устройства поступает
𝒚 принимаемого
колебания.
В
этом
устройстве
вычисляется отношение правдоподобия 𝑙 𝒚 (скалярная величина), которое
сравнивается с порогом 𝑙 в ПУ и по правилу (3.18) принимается решение
о наличии или отсутствии цели в выделенном объеме пространства.
Пороговое устройство Рис. 3.3 выполняет функцию решающего устройства
Рис. 3.1.
При стремлении к нулю интервала дискретизации 𝛥𝑡 → 0 предел
отношения
правдоподобия
lim 𝑝
∆ →
п
𝒚 /𝑝п 𝒚
𝑙𝑦 𝑡
является
функционалом от принимаемого аналогового колебания 𝑦 𝑡 . Этот
функционал для краткости далее и будем называть отношением
правдоподобия.
В
теории
и
практике
радиолокации
в
качестве
критерия
оптимальности широко применяется критерий Неймана–Пирсона. В
соответствии с этим критерием уровень порога 𝑙 выбирается так, чтобы не
было
превышено
допустимое
значение
условной
ВЛТ
𝐹
𝐹
и
одновременно минимизировалась условная вероятность пропуска сигнала
(𝐷
𝑚𝑖𝑛) или, иначе, максимизировалась условная ВПО 𝐷
120
𝑚𝑎𝑥.
Оптимизация обнаружения по критерию Неймана-Пирсона – это
типовая задача на условный экстремум. Ее можно решить, используя метод
множителей Лагранжа. При этом минимизируется функция
𝐽
𝐷
𝑙 𝐹
𝐹 ,
(3.19)
где 𝑙 – параметр (множитель Лагранжа). Для простоты положим, что
реализация на входе приемника характеризуется одним значением
(отсчетом) 𝑦
𝑦 𝑡 . Используя (3.14), функцию (3.19) представим в виде
𝐽
1
𝑙 𝐹
𝑝сп 𝑦
𝑙 𝑝п 𝑦 𝑑𝑦.
Дифференцируя это уравнение по 𝑦 и приравнивая производную к
нулю, получим
𝑝сп 𝑦
𝑙 𝑝п 𝑦
0.
При положительном значении параметра 𝑙 к области 𝐴
есть” надо отнести те значения 𝑦, для которых 𝑦
1 “цель
𝑦 . Поэтому правило
принятия решения имеет вид
𝑝сп 𝑦
сп
𝑙 𝑝п 𝑦 или𝑙 𝑦
п
𝑙 .
(3.20)
Если это условие не выполняется, то следует принять решение 𝛢
0,
т.е. опять приходим к сравнению с порогом отношения правдоподобия.
Критерий Неймана–Пирсона также приводит к оптимальному
решающему правилу (3.18). При этом величина порога обнаружения 𝑙
выбирается
непосредственно
по
вероятности ложной тревоги 𝐹
𝐹.
заданному
значению
условной
В соответствии с (3.18) отношение правдоподобия 𝑙 𝒚 содержит всю
достаточную для принятия оптимального решения информацию, т.е.
является достаточной статистикой.
121
В расчетах можно использовать монотонно нарастающие (в
дальнейшем просто монотонные) функции
𝑠 𝑙 , например, 𝑙п𝑙. При этом решающая
𝐴 𝒚
функция
выбирается
в
результате
сравнения функции 𝑠 𝑙 с порогом 𝑠
Рис. 3.4. Монотонная
функция
(Рис.
3.4).
Учитывая,
что
𝑠 𝑙
𝑙
и
𝑙
положительные величины, оптимизация
обнаружения не нарушается при их замене в (3.18) на 𝑠 𝑙 и 𝑠 , т.е.
1,
0,
𝛢опт 𝑦⃗
𝑠 𝑙
𝑠 𝑙
𝑠 ,
𝑠 .
(3.21)
Функции 𝑠 𝑙 также несут достаточную для принятия оптимального
решения информацию и поэтому являются достаточными статистиками.
Из достаточных статистик необходимо выбрать те, которые наиболее
просты и удобны для технической реализации.
Соответствующая алгоритму (3.21) структурная схема оптимального
обнаружителя приведена на Рис. 3.5.
𝒚
𝑠
𝑠𝑙 𝒚
ВУ
ПУ
𝐴
1,0
𝑠0 𝐹0
Рис. 3.5. Структурная схема
На
вход
обнаружителя
поступает
векторная
реализация
𝒚.
Вычислительное устройство ВУ определяет величину достаточной
статистики 𝑠
𝑠 𝑙 𝒚 , которая в ПУ сравнивается с порогом 𝑠
(𝑠 выбирается по заданной 𝐹
𝐹 ). В зависимости от превышения или
непревышения величиной𝑠 порога 𝑠 принимается решение 𝛢
есть”) или 𝛢
1 (“цель
0 (“цели нет”).
Из-за наличия помех в оптимальном обнаружителе возможны
ошибочные решения. В этой связи и были введены показатели качества
обнаружения: условная ВЛТ 𝐹 и условная ВПО 𝐷. Значения этих
122
вероятностей в различных радиолокационных системах обычно выбирают
в диапазонах значений 𝐹
10 , 𝐷
10
0,5 0,99.В РЛС обнаружения
плата за пропуск цели на несколько порядков выше, чем за ложную
тревогу,
а
ложная
тревога
высоко
«оценивается»
в
станциях
предупреждения о нападении.
Рассмотренная
ситуация
одноцелевого
обнаружения
является
составной частью многоцелевого обнаружения, при котором ложная
тревога возникает в любом из 𝑁
1 разрешаемых объемов. Совокупная
условная вероятность правильного необнаружения в 𝑁 таких объемах
снижается и равна
𝐹
𝐹
1
𝐹
(3.22)
При этом совокупная условная ВЛТ𝐹 пропорционально возрастает
с увеличением 𝑁, так как при 𝑁
𝐹
1
𝐹
1
1 имеем
1
𝐹
𝑁𝐹,
(3.23)
Перейдем к рассмотрению конкретных структур вычислительного
устройства (Рис. 3.5) оптимального обнаружителя.
3.3.
Обнаружение сигнала с полностью известными
параметрами на фоне некоррелированного гауссовского шума
Реальные радиолокационные сигналы, отраженные от цели, имеют
случайные параметры, т.е. не являются полностью детерминированными.
Предположение об отсутствии зависимости сигнала от случайных
параметров является его идеализацией. Однако использование модели
сигнала с полностью известными параметрами в значительной мере
способствует пониманию физических процессов оптимальной обработки
реальных сигналов со случайными параметрами.
123
3.3.1. Отношение правдоподобия и обнаружители
дискретизированного сигнала с полностью известными
параметрами
Рассмотрим
ситуацию,
когда
принимаемое
колебание
дискретизировано через временные интервалы Котельникова𝛥𝑡
𝑦 𝑡
1/2𝑓
(рис. 3.6) и представляет собой𝐿-элементную выборку дискретных
отсчетов, которая образует вектор-столбец размера 𝐿
1 :
𝐴𝒙 𝒏,
𝒚 ‖𝑦 𝑦 … 𝑦 ‖
‖𝑥 𝑥 … 𝑥 ‖ , 𝒏 ‖𝑛 𝑛 … 𝑛 ‖ – векторы мгновенных значений
где 𝒙
сигнала и помехи соответственно.
Рис. 3.6. Дискретизация принимаемого колебания
Будем полагать, что параметры сигнала 𝒙 полностью известны, но
факт наличия сигнала в принимаемом колебании является случайным
событием.
𝒏
Помеха
представляет
собой
некоррелированный
стационарный гауссовский шум (квазибелый шум) с нулевым средним
𝛭п 𝑦
𝛭 𝑛
Для
0.
этих
условий
необходимо
определить:
выражение
для
отношения правдоподобия 𝑙 𝒚 , другие достаточные статистики,
синтезируем схему оптимального обнаружителя и проанализируем ее
работу.
Ввиду стационарности дискретные отсчеты шума со спектральной
плотностью 𝑁 имеют одинаковую дисперсию
𝜎
𝜎
⋯
𝜎
𝜎
𝑁𝑓
124
𝑁 /2∆𝑡.
(3.24)
Совместная 𝐿 – мерная нормальная плотность вероятности 𝑝п 𝒚
выборки отсчетов 𝒚 при условии наличия на входе радиолокационного
приемника только помехи описывается выражением (см. Приложение 2)
𝑝п 𝒚
/
2𝜋𝜎
exp
1
2𝜎
𝑦 ,
(3.25)
а смеси сигнала и помехи
𝑝сп 𝒚
𝑝сп 𝒚
𝒙
/
2𝜋𝜎
exp
1
2𝜎
𝑦
𝑥
.
(3.26)
Подставим (3.25) и (3.26) в выражение (3.17) для отношения
правдоподобия и преобразуем его к виду
𝑙 𝒚
1
𝜎
exp
𝑦𝑥
1
2𝜎
𝑥
.
(3.27)
Первая весовая сумма в (3.27) представляет собой достаточную
статистику
𝜉
1
𝜎
𝑦𝑥
1 Т
𝒚 𝒙,
𝜎
(3.28)
1 Т
𝒙 𝒙
𝜎
(3.29)
а вторая – параметр обнаружения,
1
𝜎
𝑞
𝑥
С учетом введенных обозначений перепишем (3.27) в виде
𝑙 𝒚
exp 𝜉
𝑞 /2
(3.30)
𝑞 /2.
(3.31)
и прологарифмируем
ln 𝑙 𝒚
𝜉
Величины 𝑙𝑛 𝑙 и 𝜉 связаны монотонной зависимостью с отношением
правдоподобия 𝑙. Следовательно, сравнение отношения правдоподобия 𝑙,
определяемого выражением (3.30), с порогом 𝑙 эквивалентно сравнению
весовой суммы (3.28) с некоторым порогом 𝜉 .
125
Структурные схемы оптимальных обнаружителей с учетом (3.28)
показаны на Рис. 3.7, а,б. Они отличаются порядком выполнения операций
при вычислении весовой суммы 𝜉в вычислительном устройстве (ВУ). Это
устройство называют также устройством оптимальной обработки
(устройством вычисления достаточной статистики).
Рис. 3.7. Оптимальные обнаружители дискретизированного сигнала с
полностью известными параметрами на фоне некоррелированного шума
Выражение (3.28) определяет алгоритм оптимальной обработки
дискретизированного сигнала на фоне некоррелированной помехи при
одноканальном приеме. Оптимальную обработку сигнала на фоне
некоррелированной
помехи
называют
также
согласованной.
При
одноканальном приеме и стационарности помехи она предусматривает
выполнение следующих операций (см. рис. 3.7, б):
1. Нормирование (деление на 𝜎 ) каждого дискрета принимаемой
реализации 𝑦 (или ожидаемого сигнала 𝑥 ) к дисперсии шума.
2. Когерентное временное накопление сигнала, которое достигается
умножением
временных
реализации 𝑦 /𝜎
нормированных
отсчетов
принимаемой
на соответствующие временные отсчеты ожидаемого
сигнала 𝑥 с последующим суммированием.
Значения отсчетов ожидаемого сигнала 𝑥 𝑖 ∈ 1, 𝐿 известны заранее
и являются точными копиями отсчетов сигнала, содержащихся в
принимаемой реализации 𝒚
‖𝑥
𝑛 …𝑥
126
𝑛 ‖ .
В обнаружителе Рис. 3.7, а вначале осуществляется когерентное
временное накопление сигнала ∑ 𝑦 𝑥 , а затем результат накопления
нормируется к дисперсии шума 𝜎 . В обнаружителе Рис. 3.7, б
последовательность операций обратная.
Введем понятие отношение сигнал/помеха (сигнал/шум) на выходе
устройства оптимальной (согласованной) обработки. Для этого представим
𝒚Т 𝒙/𝜎 в виде суммы сигнальной 𝜉с
достаточную статистику 𝜉
𝒙Т 𝒙/𝜎
𝒏Т 𝒏/𝜎 составляющих:
и помеховой 𝜉п
𝜉
𝒙
𝒏 Т 𝒙/𝜎
𝒙Т 𝒙/𝜎
𝒏Т 𝒙/𝜎
𝜉с
𝜉п
Под отношением сигнал/шум (ОСШ) по мощности 𝑞
будем
понимать отношение квадрата сигнальной составляющей 𝜉 достаточной
статистики к дисперсии 𝜎п ее помеховой составляющей
𝑞
𝜉
.
𝜎п
(3.32)
Определим числитель и знаменатель этого отношения:
𝒙Т 𝒙 /𝜎 ,
𝜉с
𝜎п
М 𝜉п
𝒙Т М 𝒏𝒏Т 𝒙/𝜎
Здесь учтено, что М 𝜉п
0, М 𝒏𝒏Т
(3.33)
𝒙Т 𝒙/𝜎 .
(3.34)
𝜎 𝑰 где 𝑰 – единичная (LxL)
матрица.
Подставляя выражения (3.33) и (3.34) в (3.32), получим
𝑞
𝒙Т 𝒙/𝜎
(3.35)
Таким образом, соотношения (3.29) и (3.35) для параметра
обнаружения
и
отношения
сигнал/помеха
совпадают.
Наряду
с
отношением сигнал/помеха по мощности (энергетическим отношением
сигнал/помеха) 𝑞 вводят также отношение сигнал/помеха по напряжению
𝑞
𝑞 .
Если помеха нестационарная, то ее временные отсчеты имеют
различные дисперсии 𝜎 . В этом случае весовая сумма (3.28) и параметр
обнаружения (3.29) преобразуются к виду
127
𝜉
Дискреты
𝑦 /𝜎 𝑥 , 𝑞
принимаемой
соответствующим
дисперсиям
суммировании
меньшим
с
𝑥 /𝜎 .
𝑦 нормируются
реализации
𝜎
и
весом
в
результате
учитывается
при
элемент
по
весовом
выборки,
принимаемый на фоне более интенсивной помехи.
3.3.2. Отношение правдоподобия и обнаружители аналогового
сигнала с полностью известными параметрами
Найдем выражение для отношения правдоподобия, определим
достаточные статистики и построим схемы оптимальных обнаружителей
аналогового (недискретизированного) сигнала. С этой целью выражение
(3.27) с учетом (3.24) представим в виде
𝑙 𝒚
exp
2
𝑁
𝑦 𝑡𝒊 𝑥 𝑡𝒊 ∆𝑡 ∗ exp
Здесь использованы обозначения 𝑦 𝑡
1
𝑁
𝑥 𝑡𝒊 ∆𝑡 .
𝑦 ,𝑥 𝑡
(3.36)
𝑥.
Перейдем от функций с дискретным временем к непрерывным
функциям. Для этого устремим 𝑓
→ ∞ , т.е. от модели квазибелого шума
перейдем к модели белого шума. Соответственно интервал дискретизации
будет стремиться к нулю 𝛥𝑡
→ 0 и после предельного перехода
1/2𝑓
весовая сумма (см. (3.36)) превратится в весовой интеграл
𝜉
𝑙𝑖𝑚
→
2
𝑁
𝑦 𝑡 𝑥 𝑡 𝛥𝑡
𝑧
2
𝑁
𝑦 𝑡 𝑥 𝑡 𝑑𝑡
2𝑧
,
𝑁
𝑦 𝑡 𝑥 𝑡 𝑑𝑡
В (3.38) Z определяется, как корреляционный интеграло.
128
(3.37)
(3.38)
В свою очередь, показатель степени второй экспоненты в (3.36) после
предельного перехода примет вид
𝑙𝑖𝑚
→
1
𝑁
1
𝑁
𝑥 𝑡 𝛥𝑡
𝑥 𝑡 𝑑𝑡
Э
𝑁
𝑞
2
(3.39)
Здесь значение интеграла имеет смысл энергии сигнала, выделяемой
на единичном сопротивлении
Э
𝑥 𝑡 𝑑𝑡,
а 𝑞 представляет собой параметр обнаружения или ОСШ, на выходе
устройства согласованной обработки
𝑞
Таким
образом,
2Э
.
𝑁
(3.40)
предельный
переход
приводит
выражение
отношения правдоподобия (3.36) к следующему виду:
𝑙
𝑙𝑦 𝑡
𝑒𝑥𝑝 2𝑧/𝑁
Э/𝑁
𝑒𝑥𝑝 𝜉
𝑞 /2 ,
(3.41)
где 𝜉, 𝑧, Э, 𝑞 определяются соотношениями (3.37) – (3.40).
Логарифм отношения правдоподобия
𝑙𝑛 𝑙
𝜉
𝑞 /2
𝑞 𝜉н
𝑞/2 .
(3.42)
Из полученных соотношений следует, что корреляционный интеграл
𝑧, весовой интеграл 𝜉 и нормированный весовой интеграл 𝜉н
𝜉/𝑞 связаны
с отношением правдоподобия монотонной зависимостью, т.е. являются
достаточными статистиками. Оптимизация обнаружения обеспечивается
путем сравнения любой из этих статистик с соответствующим порогом.
Варианты схем оптимальных (согласованных) корреляционных
обнаружителей, реализующих соответственно алгоритмы (3.38), (3.37) и
(3.42), представлены на Рис. 3.8.
Каждый обнаружитель состоит из устройства согласованной
обработки (устройства вычисления достаточной статистики 𝑧, 𝜉 или 𝜉н ) и
129
порогового устройства, на второй вход которого подаются значения порога
обнаружения 𝑧 , 𝜉 или 𝜉н соответственно.
Устройство
согласованной
обработки
представляет
собой
коррелятор (перемножитель и интегратор). Поэтому рассматриваемые
обнаружители называют корреляционными. На первый вход коррелятора
поступает принимаемое колебание 𝑦 𝑡 , а на второй вход – опорное
напряжение: ожидаемый сигнал 𝑥 𝑡 (Рис. 3.8, а), весовая функция 𝑟 𝑡
2𝑥 𝑡 /𝑁
𝑟 𝑡 /𝑞
(Рис. 3.8, б), либо нормированная весовая функция 𝑟н 𝑡
2/Э𝑁 𝑥 𝑡 (Рис. 3.8, в).
Заданное значение условной вероятности ложной тревоги в
обнаружителях Рис. 3.8, а),б) обеспечивается использованием плавающего
(в зависимости от уровня помехи и ожидаемого сигнала) порога, а в
обнаружителе Рис. 3.8, в) – фиксированного порога, за счет нормирования
весовой функцией𝑟 𝑡 (или принимаемого колебания 𝑦 𝑡 ). Отметим, что
схема Рис. 3.8, в) в радиотехнике соответствует применению схемы АРУ в
приемниках.
Физический смысл корреляционной обработки поясняет Рис. 3.9, где
применительно к схеме Рис. 3.8, а) показаны ожидаемый импульсный
сигнал 𝑥 𝑡 (Рис. 3.9, а),б), эпюра 1), принимаемое колебание при его
отсутствии 𝑦 𝑡
𝑛 𝑡 (Рис. 3.9, а),эпюра 2) и его наличии𝑦 𝑡
𝑛 𝑡
𝑥 𝑡 (Рис. 3.9, б) эпюра 2).
Произведение шума 𝑛 𝑡 и ожидаемого сигнала 𝑥 𝑡 (эпюра 3, рис.
3.9,а) представляет собой шумовое знакопеременное колебание, промодулированное сигналом. К этому колебанию при наличии принимаемого
сигнала добавляется неотрицательная сигнальная составляющая 𝑥 𝑡
(рис. 3.9,б, эпюра 3), которая при интегрировании (накоплении) 𝑧
и
𝑥 𝑡 𝑑𝑡 подчеркивается (рис. 3.9,б, эпюра 4) по сравнению со
знакопеременной шумовой составляющей (рис. 3.9,а, эпюра 4).
130
2
3
4
1
Рис. 3.8.Корреляционные обнаружители аналогового сигнала с полностью
известными параметрами
x(t)
x(t)
1
t
y(t) = n(t)
t
y(t) = n(t) + x(t)
2
t
t
n(t)x(t) + x2(t)
n(t)x(t)
3
t
1
𝑧𝑡
𝑧п𝑡
1
𝑧𝑡
𝑛 𝑠 𝑥 𝑠 𝑑𝑠
τи
0
𝑧п𝑡
0
0
4
𝑥 2 𝑠 𝑑𝑠
𝑧п𝑡
t
z = zс + zп
τи
0
а
t
𝑧с𝑡
t
б
Рис. 3.9. Эпюры напряжений, поясняющие физический смысл
корреляционной обработки
В качестве отступления отметим, что корреляционный принцип обнаружения,
по-видимому, является достаточно общим в живой природе. В самом деле, в
человеческой памяти хранятся «зеркальные» образы знакомых людей. Сравнивая эти
образы с людьми, которых встречаем и видим в разных ситуациях, мы автоматически
осуществляем процедуру «обнаружение-разрешение-распознавание». При этом
объекты, окружающие этого человека, играют роль шумового фона. Поэтому
обнаружить кого-либо в пустой комнате не вызывает никакой сложности. Среди
маскирующих предметов эта задача может оказаться трудноразрешимой, и в сложной
ситуации мы обычно тратим некоторое время на ее решение. На языке радиолокации
— это время тратится на накопление элементов образа, и когда число знакомых
131
элементов (рост, нос, глаза, полнота и т.д.) превысит некоторый порог, мы решаем «он
здесь». Если порог не превышен, мы решаем «его здесь нет».
Таким образом, корреляционная обработка выявляет сходство
(корреляцию) или несходство принимаемых колебаний с ожидаемыми.
3.3.3. Показатели качества обнаружения сигналов с полностью
известными параметрами
Определим показатели качества обнаружения: условные ВЛТ(𝐹) и
ВПО(𝐷). Эти вероятности определяются через плотности вероятности
статистики 𝑠, представляющую собой случайную величину в условиях
отсутствия сигнала (наличия только помехи) 𝑝п 𝑠 и его наличия (смеси
сигнала и помехи)𝑝сп 𝑠 в принимаемом колебании:
𝐹
где 𝑙 𝑠
𝑝п 𝑠 𝑑𝑠, 𝐷
𝑝сп 𝑠 𝑑𝑠
𝑙 𝑠 𝑝п 𝑠 𝑑𝑠,
(3.43)
𝑝сп 𝑠 /𝑝п 𝑠 – отношение правдоподобия.
Далее будем полагать, что достаточной статистикой является
𝜉/𝑞 (рис. 3.8, в), где значение𝜉
нормированный весовой интеграл 𝜉н
определяется
равенством
(3.37).
Будучи
линейной
комбинацией
гауссовских случайных величин, нормированный весовой интеграл также
является гауссовской случайной величиной и, следовательно, полностью
характеризуется своими математическим ожиданием и дисперсией.
Определим их значения.
При условии наличия в принимаемом колебании только помехи с
нулевым средним
𝛭п 𝑦 𝑡
𝛭𝑛 𝑡
0
математическое ожидание
достаточной статистики определяется в виде
𝛭п 𝜉н
Э
𝛭п 𝑦 𝑡 𝑥 𝑡 𝑑𝑡
0.
В свою очередь, при наличии известного сигнала и помехи имеем
Мсп 𝜉н
2
Э𝑁
Мсп 𝑦 𝑡 𝑥 𝑡 𝑑𝑡
132
2
Э𝑁
𝑥 𝑡 𝑑𝑡
2Э
𝑁
𝑞.
Здесь учтено, что 𝛭сп 𝑦 𝑡
𝑥 𝑡 , т.е. среднее значение смеси
сигнала и помехи равно значению сигнала, или параметру обнаружения 𝑞
(по напряжению).
В свою очередь, дисперсия 𝜎 𝜉н
одинакова при наличии и в
отсутствие сигнала и определяется выражением
𝜎 𝜉н
Мп 𝜉н
Мп 𝜉н 𝜉н
2
Э𝑁
(3.44)
Мп 𝑛 𝑡 𝑛 𝑠 𝑥 𝑡 𝑥 𝑠 𝑑𝑡𝑑𝑠.
Заметим, что выражение под интегралом (3.44) представляет собой
корреляционную функцию белого шума
𝑀п 𝑛 𝑡 𝑛 𝑠
𝛿 𝑡
𝑠 .
(3.45)
Подставляя (3.45) в (3.44) и используя фильтрующее свойство 𝛿функции, получим
𝜎 𝜉н
2 𝑁
Э𝑁 2
Мп 𝜉н
𝑥 𝑡 𝑑𝑡
1.
Полученные значения дисперсии 𝜎 𝜉н
ожиданий 𝑀п 𝜉н
плотности
0 и 𝑀cп 𝜉н
вероятности
(3.46)
1 и математических
𝑞 полностью определяют гауссовские
нормированного
весового
интеграла
(предпороговой достаточной статистики) в рассмотренных ситуациях.
𝑝п 𝜉н
√
Кривые,
𝑒𝑥𝑝
𝜉н /2 , 𝑝cп 𝜉н
соответствующие
√
𝑒𝑥𝑝
этим
𝜉н
𝑞 /2 .
плотностям
(3.47)
вероятности,
представлены на рис. 3.10. Условная
𝑝п 𝜉н
𝑝сп 𝜉н
ВЛТ 𝐹
н
D
𝑝п 𝜉н 𝑑𝜉н
определяется
площадью под кривой 𝑝п 𝜉н
0
Рис. 3.10.Условные плотности
вероятности нормированного
весового интеграла
порога 𝜉
н
правее
(на рис. 3.10 эта площадь
заштрихована клетками), а условная
ВПО 𝐷
н
𝑝cп 𝜉н 𝑑𝜉н – площадью
под кривой 𝑝cп 𝜉н справа от порога (на
Рис. 3.10 – косая штриховка). Обеспечивая соответствующее значение
133
параметра
𝑞
обнаружения
2Э/𝑁 ,
можно
получить
требуемую
условную вероятность 𝐷 при заданной условной вероятности 𝐹,
определяемой уровнем порога 𝜉 н .
Используя (3.47), получим выражения для условных ВЛТ и ВПО:
𝐹
𝐷
н
н
𝑝п 𝜉н 𝑑𝜉н
𝑝cп 𝜉н 𝑑𝜉н
0,5
0,5𝜓 𝜉
0,5
0,5𝜓 𝑞
н
,
𝜉
н
(3.48)
,
(3.49)
где 𝜓 𝑢 – интеграл вероятности (интеграл Френеля):
𝜓 𝑢
𝜓 0
√
0, 𝜓 ∞
𝑢 /2 𝑑𝑢 𝑢
𝑒𝑥𝑝
1, 𝜓
𝑢
0 , удовлетворяющий условиям:
𝜓 𝑢 .
Выражение
D
1
показывает
между
F1 < F
F2 < F1
F
однозначную
величиной
связь
условной
вероятности ложной тревоги 𝐹 и
уровнем порога 𝜉
q
0
(3.48)
3.10).
Рис. 3.11.Кривые обнаружения
обнаружения, т.е. зависимости 𝐷 𝑞
н
(см. также Рис.
Выражение
определяет
при 𝐹
(3.49)
кривые
const. Семейство таких
кривых представлено на Рис. 3.11. При уменьшении 𝐹 (увеличении уровня
порога) кривые обнаружения смещаются вправо. В этом случае для
обеспечения заданной𝐷требуется большая энергия сигнала (см. также Рис.
3.10.). С ростом 𝑞 кривые обнаружения монотонно приближаются к 1.
Заметим, что синтезированные по критерию Неймана-Пирсона
оптимальные обнаружители обеспечивают максимальное значение 𝐷 при
фиксированной ВЛТ𝐹. Учитывая монотонно возрастающий характер
зависимостей 𝐷 𝑞 , можно утверждать, что устройства согласованной
обработки
этих
обнаружителей
обеспечивают
на
своих
наивысшее (максимальное) отношение сигнал/шум 𝑞
сравнению с любыми другими устройствами обработки.
134
выходах
2Э/𝑁
по
Пользуясь
кривыми
обнаружения,
можно
найти
(минимальное) значение параметра обнаружения 𝑞
пороговое
, при котором
обеспечиваются заданные показатели 𝐷 и 𝐹.
Ранее в разделе 2 был введен коэффициент различимости 𝐾 ,
связанный с параметром обнаружения соотношением
Эпр
𝐾
где Эпр
,
(3.50)
– минимальное значение энергии принимаемого сигнала,
при котором обеспечиваются заданные показатели 𝐷 и 𝐹. Требуемое
значение 𝐾 также определяется из кривых обнаружения (см. Рис. 3.11) и в
основном используется при расчете дальности действия (обнаружения)
РЛС.
3.3.4. Достаточные статистики при обнаружении узкополосных
высокочастотных сигналов
Определим,
каким
образом
можно
вычислить
достаточные
статистики при обнаружении высокочастотных узкополосных сигналов,
наиболее распространенных в радиолокационной практике.
Высокочастотное принимаемое колебание 𝑦 𝑡 и ожидаемый сигнал
𝑥 𝑡
являются вещественными функциями и, как правило являются
узкополосными, т.е. их центральная частота 𝑓 существенно превышает
ширину спектра импульса ∆𝑓и 𝑓 ≫ ∆𝑓и . Для их описания вводят
комплексные огибающие (амплитуды) 𝑌 𝑡 и 𝑋 𝑡 , а мгновенные значения
𝑦 𝑡 и 𝑥 𝑡 обычно представляются в виде
𝑦 𝑡
𝑅𝑒 𝑌 𝑡 exp 𝑗2𝜋𝑓 𝑡 , 𝑥 𝑡
𝑅𝑒 𝑋 𝑡 exp 𝑗2𝜋𝑓 𝑡 .
В этом случае корреляционный интеграл (3.38) можно представить
следующим образом:
𝑧
𝑅𝑒 𝑍
𝑅𝑒
𝑌 𝑡 𝑋 ∗ 𝑡 𝑑𝑡 .
(3.51)
Вывод этой формулы содержится в Приложении 3, где комплексный
корреляционный интеграл определен в виде
135
1
2
𝑍
𝑌 𝑡 𝑋 ∗ 𝑡 𝑑𝑡
(3.52)
Аналогичное (3.51) комплексное представление имеет место и для
весового интеграла (3.37), а также нормированного весового интеграла
𝜉
𝑅𝑒 𝑍 ,
𝜉/𝑞
𝜉н
𝑅𝑒 𝑍н ,
(3.53)
2𝑍
𝑁
(3.54)
где
𝑍
1
𝑁
𝑌 𝑡 𝑋 ∗ 𝑡 𝑑𝑡
– комплексный весовой интеграл.
В свою очередь, энергия сигнала (3.39) через его комплексную
огибающую представляется в виде
𝑋 𝑡
𝑥 𝑡 𝑑𝑡
Э
𝑑𝑡.
(3.55)
Из выражений (3.37), (3.38) и (3.51) – (3.54) следует, что анализ
корреляции
мгновенных
значений
узкополосных
высокочастотных
сигналов сводится к анализу корреляции их комплексных амплитуд
(комплексных огибающих). Далее в зависимости от решаемой задачи
будем пользоваться всеми тремя способами вычисления корреляции через
𝑧(3.51), 𝑍(̶ 3.52) и 𝑍н (3.53).
С практической точки зрения это означает, что корреляционная
обработка высокочастотного сигнала может быть реализована на любой
промежуточной или видеочастоте без потерь. Это связано с тем, что вся
полезная
информация
радиолокационного
техническим
содержится
сигнала,
приемом
для
а
его
в
несущая
комплексной
частота
излучения
пространстве.
136
и
амплитуде
является
лишь
распространения
в
3.4.
Обнаружение когерентных сигналов со случайными
параметрами при на фоне некоррелированного гауссова шума
3.4.1. Методика вычисления отношения правдоподобия для
когерентных сигналов со случайными неинформативными
параметрами
Пусть сигнал имеет случайный неинформативный параметр 𝛽,
например, амплитуду или начальную фазу. Тогда совместную плотность
вероятности 𝑝сп 𝑦, 𝛽 можно представить в виде
𝑝сп 𝑦, 𝛽
где 𝑝сп 𝑦/𝛽
𝑝сп 𝑦/𝛽 𝑝 𝛽 ,
(3.56)
– плотность вероятности 𝒚 при условии наличия
сигнала с фиксированным значением 𝛽,𝑝 𝛽
– априорная плотность
вероятности значения параметра 𝛽.
Неинформативный параметр 𝛽 может быть исключен из выражения
(3.56) различными способами. Так, плотность вероятности 𝑝сп 𝑦 может
быть определена через 𝑝сп 𝑦, 𝛽 путем интегрирования по параметру 𝛽
𝑝сп 𝑦
𝑝сп 𝑦, 𝛽 𝑑𝛽,
а с учетом (3.56) при известной априорной плотности вероятности
𝑝 𝛽 она представляется в виде
𝑝сп 𝑦
𝑝сп 𝑦/𝛽 𝑝 𝛽 𝑑𝛽 .
Подставим эти равенства в выражение, которое определяет искомое
отношение правдоподобия (3.17)
𝑙 𝑦
где 𝑙 𝑦/𝛽
𝑝сп 𝑦
𝑝п 𝑦
𝑙 𝑦, 𝛽 𝑑𝛽
𝑙 𝑦/𝛽 𝑝 𝛽 𝑑𝛽,
(3.57)
𝑝сп 𝑦/𝛽 /𝑝п 𝑦 – частное отношение правдоподобия при
фиксированном значении 𝛽.
Таким образом, методика вычисления отношения правдоподобия
для сигнала со случайным неинформативным параметром 𝛽сводится к
137
вычислению частного отношения правдоподобия 𝑙 𝑦/𝛽 и его усреднению
по параметру 𝛽.
Если неинформативный параметр 𝛽 представляет собой случайную
начальную
фазу
с
равномерным
распределением,
то
плотность
вероятности 𝑝 𝛽 и частное отношение правдоподобия 𝑙 𝑦/𝛽 , входящее в
(3.57), будут иметь вид
1
, 𝛽 ∈ 0,2𝜋 ,
2𝜋
𝑝 𝛽
𝑙 𝑦/𝛽
𝑒𝑥𝑝 𝜉 𝛽
(3.58)
𝑞 𝛽 /2 .
(3.59)
Соотношение (3.59) при фиксированном (т.е. известном) параметре 𝛽
получено из соотношения (3.30) путем замены 𝜉 и 𝑞 на зависимости𝜉 𝛽
и 𝑞 𝛽 ,
которые представляют собой частные значения весового
интеграла и параметра обнаружения.
Переходя от дискретизированного принимаемого колебания 𝑦 к
недискретизированному (аналоговому) 𝑦 𝑡 , т.е. совершая предельный
переход при 𝛥𝑡 → 0, вместо (3.57) можно записать
𝑙𝑦 𝑡
𝑙 𝑦 𝑡 /𝛽 𝑝 𝛽 𝑑𝛽,
(3.60)
где
𝑙 𝑦 𝑡 /𝛽
𝑙𝑖𝑚
→
𝑝сп 𝑦/𝛽
.
𝑝п 𝑦
(3.61)
Если сигнал содержит несколько неинформативных параметров
(например, случайные начальную фазу и амплитуду), то в (3.57) и (3.60)
скалярную величину 𝛽 следует заменить векторной 𝜷 и провести
усреднение по обоим параметрам в любом порядке, используя двумерную
плотность распределения
𝑙𝑦 𝑡
𝑙 𝑦 𝑡 /𝜷 𝑝 𝜷 𝑑𝑉
.
Здесь 𝑑𝑉 – элементарный объем пространства параметров 𝜷.
138
(3.62)
Последовательно
рассмотрим
отношения
правдоподобия
при
обнаружении аналогового сигнала со случайной начальной фазой и
сигнала
со
случайными
амплитудой
квазидетерменированнные
сигналы,
и
как
начальной
и
сигнал
фазой.
с
Такие
известными
параметрами, в радиолокации относят к когерентным.
3.4.2. Отношение правдоподобия и корреляционные
обнаружители сигнала со случайной начальной фазой
Аналоговый когерентный сигнал со случайной начальной фазой 𝛽
описывается комплексной амплитудой 𝑋 𝑡, 𝛽
𝑋 𝑡 𝑒 . Используя это
равенство, а также (3.41), (3.53) и (3.54) частное отношение правдоподобия
и частное значение весового интеграла представим соответственно в виде
𝜉 𝛽
𝑙 𝑦 𝑡 /𝛽
𝑒𝑥𝑝 𝜉 𝛽
𝑅𝑒 𝑍 𝛽
𝑅𝑒
𝑅𝑒 𝑍 𝑒𝑥𝑝
1
𝑁
𝑗𝛽
𝑞 𝛽 /2 ,
(3.63,а)
𝑌 𝑡 𝑋 ∗ 𝑡, 𝛽 𝑑𝑡
𝑍 𝑐𝑜𝑠 𝛽
(3.63,б)
𝑎𝑟𝑔 𝑍 ,
где 𝑍 , 𝑎𝑟𝑔 𝑍– модуль и аргумент комплексного весового интеграла (3.54).
Энергия сигнала не зависит от его начальной фазы, т.е. Э 𝛽
Э
Следовательно, параметр обнаружения 𝑞 𝛽
Таким
образом,
частное
отношение
Э
Э.
𝑞 .
правдоподобия
(3.63)
записывается следующим образом:
𝑙 𝑦 𝑡 /𝛽
𝑒𝑥𝑝
𝑞 /2 𝑒𝑥𝑝 𝑍 𝑐𝑜𝑠 𝛽
𝑎𝑟𝑔 𝑍 .
(3.64)
Случайную начальную фазу принятого сигнала можно считать
распределенной равномерно, так как он может быть рассеян целью с любой
дальности в зоне обзора. Тогда подставив (3.58) и (3.64) в (3.60), получим
искомое отношение правдоподобия в виде
𝑙𝑦 𝑡
𝑒𝑥𝑝
𝑞 /2 𝛪
где
139
𝑍 ,
(3.65)
𝛪
𝑍
1
2𝜋
𝑒𝑥𝑝 𝑍 𝑐𝑜𝑠 𝛽
𝑎𝑟𝑔 𝑍 𝑑𝛽
– модифицированная функция Бесселя
нулевого порядка (рис. 3.12).
В
силу
функции 𝛪
монотонного
𝑍
характера
в качестве достаточной
статистики при обнаружении сигнала со
случайной
Рис. 3.12.Модифицирован
ная функция Бесселя
нулевого порядка
начальной
использовать
фазой
модульное
можно
значение
комплексного весового интеграла 𝑍 .
Учитывая, что
𝑍
𝑍
и
𝑍
𝑞 𝑍н , отношение правдоподобия (3.65) можно представить следующей
эквивалентной формулой:
𝑙𝑦 𝑡
𝑞 /2 𝛪
𝑒𝑥𝑝
2
𝑍
𝑁
𝑒𝑥𝑝
𝑞 /2 𝛪 𝑞 𝑍н .
(3.66)
Следовательно, и в этом случае достаточными статистиками также
являются модульные значения комплексного корреляционного интеграла
𝑍 и нормированного весового интеграла 𝑍н .
Модуль комплексного корреляционного интеграла (3.52) можно
представить в виде
𝑍
𝑅𝑒 𝑍
Ιm 𝑍 ̶
𝑧
𝑧 ,
(3.67)
где действительная и мнимая части равны
𝑧
𝑧
𝑅𝑒 𝑍
𝑦 𝑡 𝑥 𝑡 𝑑𝑡,
(3.68)
𝛪𝑚 𝑍
𝑦 𝑡 𝑥 𝑡 𝑑𝑡.
(3.69)
140
При этом ожидаемые сигналы 𝑥 𝑡
𝑋 𝑡 𝑠𝑖𝑛 𝜔 𝑡
𝜙 𝑡
𝑋 𝑡 𝑐𝑜𝑠 𝜔 𝑡
𝜙 𝑡
и𝑥 𝑡
отличаются сдвигом фаз на 90∘ , т.е. являются
квадратурными.
При этом оптимальное решающее правило в рассматриваемом случае
имеет вид
𝐴
1,
если 𝑍
𝑍 ,
0,
если 𝑍
𝑍 .
Схема корреляционного обнаружителя сигнала
(3.70)
со случайной
начальной фазой, построенная в соответствии с (3.67) – (3.70), показана
на Рис. 3.13, а.
Корреляционный обнаружитель имеет два квадратурных канала
(подканала). На первые входы перемножителей каналов поступает входная
реализация, а на вторые входы – ожидаемые сигналы 𝑥 𝑡
и 𝑥 𝑡 ,
сдвинутые по фазе на 90∘ . Ожидаемый сигнал 𝑥 𝑡 может быть получен
непосредственно из зондирующего сигнала или сформирован специальным
гетеродином, в зависимости от того, на какой частоте ведется обработка.
Наличие двух каналов (в отличие от схемы одноканального
корреляционного обнаружителя Рис. 3.9,а полностью известного сигнала)
позволяет исключить потерю полезного сигнала за счет незнания его
начальной фазы 𝛽. Если полезный сигнал 𝑥 𝑡, 𝛽 , содержащийся в 𝑦 𝑡 , не
создает эффекта на выходе верхнего канала, то он создает максимальное
приращение на выходе нижнего канала и наоборот.
141
3
𝑦 𝑡
2
1
𝑥 𝑡
∫
∫
90о
∫
∫
φ
2𝑥 𝑡 /𝑞𝑁0
90о
4
𝑧2
𝑧⊥
𝑧⊥2
Z
ПУ
𝐴
𝑍0
7
КОРРЕЛЯТОР С
КВАДРАТУРНЫМИ
КАНАЛАМИ
а
5
φ
𝑦 𝑡
𝑧
𝜉𝐻
𝜉𝐻2
𝜉𝐻⊥
ξ2𝐻⊥
𝑍𝐻
ПУ
КОРРЕЛЯТОР С
КВАДРАТУРНЫМИ
КАНАЛАМИ
𝐴
𝑍0𝐻
б
Рис. 3.13. Корреляционные обнаружители с двумя квадратурными
каналами
Рис. 3.14 иллюстрирует случай, когда фазовый сдвиг между
принимаемым полезным сигналом 𝑦 𝑡
𝑥 𝑡, 𝛽 и опорным колебанием
𝑥 𝑡 верхнего подканаларавен нулю 0∘ (Рис. 3.14, а), а нижнего подканала
– 90∘ (Рис. 3.14, б). По окончании воздействия входного сигнала
напряжение на выходе верхнего канала (сигнальная составляющая
корреляционного интеграла 𝑧 ) максимально (Рис. 3.14, а, эпюра 4), а на
выходе нижнего канала равно нулю (Рис. 3.14, б, эпюра 7).
142
𝑦 𝑡
𝑥 𝑡, 𝛽
𝑦 𝑡
1 0
𝑥 𝑡, 𝛽
1 0
t
𝑥 𝑡
𝑥⊥ 𝑡
2 0
𝑦 𝑡
t
5 0
t
t
𝑦 𝑡 𝑥⊥ 𝑡
𝑥 𝑡
3 0
6 0
t
𝑧𝑐
4 0
а
t
𝑚𝑎𝑥
𝑧𝑐⊥
7 0
t
0
t
б
Рис. 3.14. К пояснению необходимости двух квадратурных каналов
При произвольной начальной фазе 𝛽 сигнальные составляющие на
выходе
квадратурных
сигнальная
составляющая
Эсos𝛽, 𝑧
𝑧
каналов:
модуля
комплексного
Э 𝑠𝑖𝑛 𝛽.
Поэтому
корреляционного
интеграла
𝑍̶
𝑧
𝑧
Э 𝑐𝑜𝑠 𝛽
𝑠𝑖𝑛 𝛽
Э
не зависит от случайной фазы 𝛽.
В корреляционном обнаружителе Рис. 3.13, б с фиксированным
порогом вычисляется модуль нормированного комплексного весового
интеграла 𝑍н . Обнаружители Рис. 3.13, а и Рис. 3.13, б отличаются только
опорными колебаниями и значениями порогов. В обнаружителе Рис. 3.13,
а порог плавающий, а в обнаружителе Рис. 3.13, б – фиксированный.
3.4.3. Отношение правдоподобия при обнаружении сигнала со
случайными амплитудой и начальной фазой
Комплексная амплитуда когерентного сигнала со случайными
амплитудой и начальной фазой имеет вид
𝑋 𝑡, 𝛽⃗
𝐵𝑋 𝑡 𝑒 ,
где 𝐵 – случайный амплитудный множитель с плотностью
вероятности 𝑝 𝐵 , 𝐵
0 по определению).
143
В предположении о независимости распределений начальной фазы и
амплитуды выражение (3.62) может быть представлено следующим
образом:
𝑙𝑦 𝑡
𝑙 𝑦 𝑡 /𝛽, 𝐵 𝑝 𝛽 𝑝 𝐵 𝑑𝛽𝑑𝐵.
(3.71)
Здесь усреднение удобно провести сначала по 𝛽, потом по 𝐵, хотя
порядок не важен. Тогда по аналогии с (3.64), частное отношение
правдоподобия можно представить выражением
𝑙 𝑦 𝑡 /𝛽, 𝐵
𝑒𝑥𝑝 𝜉 𝛽, 𝐵
𝑞 𝐵 /2 ,
(3.72)
где
𝜉 𝛽, 𝐵
𝑅𝑒
1
𝑁
𝑌 𝑡 𝑋 ∗ 𝑡, 𝛽⃗ 𝑑𝑡
𝑞 𝐵
𝐵 𝑍 𝑐𝑜𝑠 𝛽
𝑎𝑟𝑔 𝑍 ,
𝐵 𝑞 .
Подставим эти соотношения в (3.71) и после интегрирования по 𝛽
получим полное отношение правдоподобия
𝑙𝑦 𝑡
𝐵 𝑞 /2 𝛪 𝐵 𝑍 𝑝 𝐵 𝑑𝐵.
𝑒𝑥𝑝
(3.73)
В (3.73) входит ненормированный амплитудный множитель 𝐵,
средний
квадрат
которого
примем
равным
нормированный амплитудный множитель 𝑏
1. Тогда 𝐵
𝐵 𝑏, 𝑝 𝐵
𝑝 𝑏
𝛭𝐵
𝐵 .
Введем
𝐵/𝐵 , для которого 𝛭 𝑏
𝑝 𝑏 /𝐵 , 𝑑𝐵
𝐵 𝑑𝑏 и соотношение
(3.73) преобразуется к виду
𝑙𝑦 𝑡
Здесь 𝑞ср
соответствует
𝑒𝑥𝑝
𝐵 𝑞
𝛭𝑞 𝐵
средней
энергии
амплитуде сигнала; 𝑍
𝑏 𝑞ср 𝛪 𝑏 𝑍
– параметр обнаружения, который
Эср
𝛭Э 𝐵
флуктуирующего
𝐵 𝑍 . В дальнейшем примем, условие 𝐵
Поэтому далее индексы "ср" и "𝐵 " при 𝑞ср и 𝑍
выражение для𝑙 𝑦 𝑡
𝑝 𝑏 𝑑𝑏.
в виде
144
по
1.
опустим и перепишем
𝑙𝑦 𝑡
𝑒𝑥𝑝
𝑏 𝑞 𝛪 𝑏 𝑍 𝑝 𝑏 𝑑𝑏.
𝑍
В соответствии с (3.74) величина
(3.74)
связана с отношением
правдоподобия монотонной зависимостью при любых распределениях
𝑝 𝑏 .
В
качестве
амплитудного
примера
множителя,
рассмотрим
рэлеевское
соответствующее
распределение
распределению
модуля
квадратур, каждая из которых распределена по нормальному закону
𝑝 𝑏
2𝑏 𝑒𝑥𝑝
𝑏 .
(3.75)
Отметим, что в радиолокации этому закончу часто подчиняются ЭПР
многоточечных целей.
Подставляя (3.75) в (3.74) и используя табличный интеграл
𝑥𝛪 𝜇𝑥 𝑒𝑥𝑝
1
𝑒𝑥𝑝 𝜇 /4𝜈 ,
2𝜈
𝜈𝑥 𝑑𝑥
получим выражения отношения правдоподобия для сигнала с
равновероятной начальной фазой и рэлеевской амплитудой
𝑙𝑦 𝑡
1
𝑍
1
𝑒𝑥𝑝
𝑞 /2
4 1 𝑞 /2
1
𝑞 𝑍н
1
𝑒𝑥𝑝
𝑞 /2
4 1 𝑞 /2
(3.76)
или
𝑙𝑦 𝑡
(3.77)
.
Анализ соотношений (3.74,) (3.76), (3.77), а также (3.65), (3.66)
приводит к следующему выводу. При обнаружении сигнала со случайными
амплитудой и начальной фазой, как и сигнала только со случайной
начальной
фазой,
комплексного
комплексного
достаточными
весового
весового
статистиками
𝑍,
интеграла
интеграла
корреляционного интеграла
𝑍н
являются:
модуль
или
модуль
нормированного
модуль
комплексного
𝑍 . Поэтому структура корреляционных
обнаружителей такого сигнала соответствует Рис. 3.13.
145
Следует заметить, что при отсутствии априорной информации о
распределениях 𝛽 и 𝐵 выражение отношения правдоподобия 𝑙 может быть
получено из исходногосоотношения (см. (3.72))
𝑙 𝛽, 𝐵
𝑒𝑥𝑝
𝐵
𝑞
𝑒𝑥𝑝 𝐵𝑞 𝑍н 𝑐𝑜𝑠 𝛽
2
𝑎𝑟𝑔 𝑍н
(3.78)
путем предварительной максимизации по 𝛽 и 𝐵. При этом определяются
такие значения 𝛽 и 𝐵 при которых 𝑙 𝛽, 𝐵 достигает максимума:
𝛽
𝑎𝑟𝑔 𝑍н , В
𝑍н /𝑞.
Эти значения можно подставить в (3.78) и при этом исключить
зависимость отношения правдоподобия от 𝛽 и 𝐵. Тогда выражение для
отношения правдоподобия (3.78) примет вид
𝑒𝑥𝑝 𝑍н /2 .
𝑙
(3.79)
Соотношение (3.79) также приводит к структурным схемам
корреляционных обнаружителей, показанным на Рис. 3.13.
3.4.4. Показатели качества обнаружения когерентных сигналов
со случайными параметрами. Кривые обнаружения
Для расчета показателей качества обнаружения воспользуемся
соотношениями (3.43) для условных ВЛТ и ВПО. В качестве достаточной
статистики 𝑠 будем использовать модуль нормированного комплексного
весового интеграла
𝑠
При
отсутствии
синфазного сигнала 𝜉н
𝑍н
𝑍н
сигнала
𝜉н
(3.80)
𝜉н .
нормированный
весовой
интеграл
𝑅𝑒 𝑍н имеет гауссовское распределение (см. п.
3.3.3) с нулевым средним и единичной дисперсией. Очевидно, что
составляющая в квадратурном канале 𝜉н
Ιm 𝑍н подчиняется такому же
закону распределения. В этой связи модуль нормированного комплексного
весового интеграла (3.80) имеет рэлеевское распределение, показанное на
Рис. 3.15
146
𝑝п 𝑍н
𝑍н 𝑒𝑥𝑝
𝑍н /2 .
(3.81)
Подставляя (3.81) в (3.43), получим
𝐹
𝑍н 𝑒𝑥𝑝
𝑍н /2 𝑑𝑍н
𝑒𝑥𝑝
𝑍но /2 .
но
Отсюда уровень порога, равный 𝑍но
2 𝑙𝑛 1/𝐹 , однозначно связан
с условной ВЛТ 𝐹и зависит от неё.
При наличии сигнала плотность
вероятности 𝑝сп 𝑍н , которая входит в
0
(3.43),
Рис. 3.15.Условные плотности
вероятности модуля
нормированного комплексного
весового интеграла
𝑝сп 𝑍н
представляется
в
виде
произведения
𝑙 𝑍н 𝑝п 𝑍н ,
(3.82)
где 𝑙 𝑍н – отношение правдоподобия.
Для сигнала со случайной начальной фазой подставим (3.66) и (3.81)
в (3.82) и получим, что 𝑝сп 𝑍н (заштрихованная область на Рис. 3.15)
описывается обобщенным законом Рэлея
𝑝сп 𝑍н
𝑍н 𝛪 𝑞𝑍н 𝑒𝑥𝑝
𝑍н
𝑞 /2 .
(3.83)
Тогда, согласно (3.43),выражение для условной ВПО 𝐷 примет вид
𝐷
/
𝑍н 𝛪 𝑞𝑍н 𝑒𝑥𝑝
𝑍н
𝑞 /2 𝑑𝑍н .
(3.84)
Для сигнала со случайной начальной фазой и рэлеевской случайной
амплитудой, используя (3.43), (3.77), (3.81), приближенно (точное
выражение приводит к нетабличным интегралам) получим
𝐷
При
этом
когерентного
величина
сигнала
𝐹
𝑞
/
для
(3.85)
.
флуктуирующего
рассчитывается
по
его
по
средней
амплитуде
энергии,
соответствующей амплитудному множителю B 0 в п. 3.4.3. Формула (3.85)
147
удобна для практических расчетов и в большинстве случаев имеет
достаточную точность.
Построенные в соответствии с (3.84) и (3.85), кривые обнаружения
𝐷 𝑞 (или 𝐷 𝐾 , 𝐾
𝑞 /2 при 𝐹
const приведены на рис. 3.16 для
сигнала с равновероятным распределением начальной фазы (штриховые
кривые) и для сигнала с рэлеевским распределением амплитуды и
равновероятным распределением фазы (сплошные линии). Для сравнения
штрих-пунктирными линиями показаны кривые обнаружения сигнала с
полностью известными параметрами (см. п. 3.3.3).
1,0
Сигнал с полностью
0,8
известными
0,6
параметрами
0,4
Сигнал со случайной
начальной фазой
0,2
Сигнал
0 2
-10
4
0 46 8
6
10 12
8
14 16
10
12 14
18
20
16
18
21
22
со
случайными
, дБ
начальной
фазой
и
Рис. 3.16.Кривые обнаружения
Кривые для сигнала со случайной начальной фазой сдвинуты вправо
по сравнению с кривыми обнаружения сигнала с полностью известными
параметрами. В этом случае требуется большая энергия сигнала для
обеспечения заданных показателей качества 𝐷 и 𝐹.
Кривые обнаружения флуктуирующего по амплитуде (рэлеевского)
сигнала (сплошные линии) в области больших значений 𝐷 существенно
сдвинуты вправо по сравнению с кривыми для полностью известного
сигнала. При этом для обнаружения требуется значительное увеличение
средней энергии флуктуирующего сигнала. В области же малых значений
𝐷 (малых значений 𝑞) эти кривые сдвинуты немного влево, поскольку
флуктуации амплитуды сигнала могут обеспечить превышение порога.
148
Кривые на Рис. 3.16 наглядно иллюстрируют достаточно общий
принцип: чем меньше информации о сигнале, тем больше энергии требуется
для его обнаружения.
Таким образом, условная вероятность правильного обнаружения 𝐷
когерентного сигнала при заданной 𝐹 (для разрешаемого объема) зависит
от
параметра
обнаружения
(ОСШ)
𝑞
пересчитывается в коэффициент различимости 𝐾
2Э/𝑁 ,
что
легко
Э/𝑁 . В свою очередь,
параметр обнаружения зависит только от энергии сигнала и спектральной
плотности мощности шума и не зависит от закона модуляции (формы)
сигнала.
Здесь следует отметить, что полученные кривые обнаружения на Рис. 3.16
справедливы только для случая, когда в качестве помехи выступает белый
некоррелированный шум с нормальным законом распределения. Если об этом не
помнить, то можно прийти к парадоксальным результатам. Например, пусть ОСШ
равно 10. Тогда возводя эти значения в 10 степень мы получим параметр обнаружения
10 и согласно кривым обнаружения на Рис. 3.16 значение ВПО 𝐷 → 1. Ошибки
𝑞
здесь заключаются в том, что осуществляя нелинейную операцию – возведение в
степень, мы существенно изменяем закон распределения шума, и несмотря на
возведение в 10ую (или любую другую) степень значения сигнала, мы не получим
выигрыш в ВПО D при фиксированном ВЛТ F по сравнению с линейной обработкой.
В предельном случае, когда о сигнале вообще ничего не известно,
единственным
способом
его
обнаружения
является
реализация
энергетического приемника с некогерентным накоплением. Показатели
качества такого обнаружителя будут самыми низкими и фактически могут
работать только при достаточно большом ОСШ.
149
3.4.5. Корреляционные обнаружители сигналов с неизвестными
временем запаздывания и доплеровской частотой
Синтез корреляционных обнаружителей когерентных сигналов,
приведенных на Рис. 3.13, предполагал,
ПУ
что время запаздывания 𝑡з и доплеровская
частота
ПУ
𝐹д
сигнала
действительности
эти
известны.
В
параметры
на
практике почти всегда не определены.
Например, из-за незнания 𝑡з принимаемый
ПУ
полезный сигнал и ожидаемый (опорный)
сигнал коррелятора (Рис. 3.13) могут не
перекрыться во времени. Это приводит к
Рис. 3.17. Многоканальный
корреляционный
тому, что сигнальная составляющая 𝑍
обнаружитель сигнала
обращается в нуль. По мере увеличения степени перекрытия принимаемого
и ожидаемого сигналов составляющая 𝑍
нарастает. В связи с этим
необходимо вычислять 𝑍 для различных значений 𝑡з .
На
Рис.
3.17
показан
многоканальный
корреляционный
обнаружитель сигнала с неизвестным временем запаздывания. Он состоит
из независимых одноканальных обнаружителей, показанных на Рис. 3.13.
В каждом канале с помощью коррелятора с квадратурными каналами
формируется достаточная статистика 𝑍 𝑡з
для фиксированного значения
𝑡з . Для этого ожидаемые сигналы, подаваемые на корреляторы соседних
каналов, сдвинуты относительно друг друга по времени. Этот сдвиг
должен не превышать меры разрешающей способности по 𝑡з (см. раздел 4).
Количество каналов обработки определяется отношением ожидаемого
диапазона изменения дальности 𝑅 (времени запаздывания 𝑡з ) к мере
разрешающей
способности
по
дальности
150
𝛥𝑅 Δ𝑡з .
Например,
если 𝑅
= 150 км (𝑡з =10 c) и 𝛥𝑅 = 150 м (𝑡з =10 c), количество
корреляционных каналов на Рис. 3.17 должно быть не менее 1000.
Многоканальное построение обнаружителя (устройства обработки)
также используется, когда неизвестно не только время запаздывания, но и
доплеровская частота сигнала, а также угловые координаты цели.
На Рис. 3.18 приведена схема многоканального корреляционного
устройства обработки при неизвестных 𝑡з и 𝐹д .
Ожидаемые
сигналы
𝑥 𝑡, 𝑡з , 𝐹д
в
этом
случае
имеют
соответствующие значения времени запаздывания 𝑡з и доплеровской
Число каналов по Fд
Схема отбора максимума
частоты 𝐹д , а количество каналов обработки возрастает еще больше.
№ канала
(t зi , Fдi )
Число каналов по 𝑡з
Рис. 3.18. Многоканальное корреляционное устройство обработкипри
неизвестных 𝑡з и𝐹д
Качество обнаружения характеризуется кривыми обнаружения (Рис.
3.16). При этом условную вероятность ложной тревоги для одного
элемента разрешения 𝐹
𝐹 /𝑁 связывают с условной вероятностью
ложной тревоги 𝐹 для совокупности 𝑁 элементов разрешения (см. п. 3.2).
Практически учитывают также энергетические потери, связанные с
уменьшением отношения сигнал – шум на стыках между каналами, а также
ошибки при отборе канала по максимуму.
151
Таким образом, для корреляционных обнаружителей характерна
многоканальность по 𝑡з и 𝐹д , приводящая не только к усложнению
аппаратуры, но и потерям. Применение многоканального корреляционного
обнаружителя (Рис. 3.17) целесообразно в том случае, когда априорный
интервал возможного изменения времени запаздывания сигнала является
небольшим. Это может иметь место, например, при наличии целеуказания.
При заведомо широком априорном интервале изменения параметра𝑡з
практический
интерес
представляют
инвариантные
ко
времени
запаздывания фильтровые обнаружители, которые рассматриваются в
разделе 4.
3.5.
Обнаружение некогерентных сигналов
Рассмотрим особенности обнаружения некогерентных сигналов,
формируемых передатчиками РЛС типа «магнетрон». До настоящего
времени они всё ещё используются в радиолокации.
Некогерентным является сигнал, у которого фазовая структура не
является закономерной, т.е. она случайна. При этом и огибающая сигнала
может также претерпевать случайные изменения.
Обнаружение некогерентных сигналов рассмотрим на примере
обнаружения наиболее важной их разновидности – некогерентной пачки
радиоимпульсов с периодом повторения Т, состоящей из 𝑀 импульсов
длительностью 𝜏и .
3.5.1. Отношение правдоподобия и фильтровой обнаружитель
некогерентной пачки радиоимпульсов
Для модели некогерентной пачки (Рис. 3.19), составленной из 𝑀
когерентных
Т
𝜏фл и 𝜏и
радиоимпульсов,
следует
потребовать
два
условия:
𝜏фл , где 𝜏фл – время корреляции флуктуаций. Для такой
пачки справедливо выражение
152
𝑋 𝑡, 𝛽
𝑏 𝑋 𝑡 𝑒𝑥𝑝 𝑗𝛽 .
(3.86)
Рис. 3.19. Некогерентная пачка радиоимпульсов
Неслучайные функции 𝑋 𝑡
описывают отдельные когерентные
импульсы пачки, а случайные значения 𝑏 и 𝛽
учитывают изменения
структуры пачки за счет ее флуктуационной модуляции и полагаются
статистически независимыми. Каждый 𝜇- й импульс пачки имеет
случайную начальную фазу 𝛽 и амплитуду 𝑏 , и поэтому пачка в целом
является некогерентной.
Получим отношение правдоподобия для некогерентной пачки
радиоимпульсов и синтезируем схему оптимального обнаружителя.
С этой целью принимаемую реализацию 𝑦 𝑡
разобьем на 𝑀
реализаций 𝑦 𝑡 , относящихся к разным периодам следования (Рис. 3.19).
После дискретизации перейдем от 𝑦 𝑡 к 𝑦 𝑡 и от 𝑦 к 𝑦 . Все дискретные
отсчеты некоррелированного гауссовского шума независимы между собой.
Следовательно, при отсутствии сигнала независимы и вектора 𝒚 , т.е.
𝑝п 𝒚
𝑝п 𝑦 , 𝑦 , . . . , 𝑦
𝑝п 𝑦 .
(3.87)
При наличии сигнала с независимыми случайными параметрами в
разных
периодах
повторения
их
плотности
распределений
также
независимы, и поэтому
𝑝сп 𝒚
𝑝сп 𝑦 , 𝑦 , . . . , 𝑦
𝑝
153
п
𝑦 .
(3.88)
Подставляя (3.87) и (3.88) в выражение 𝑙 𝒚
что
отношение
𝑙 𝒚
правдоподобия
𝑙
𝑝сп 𝒚 /𝑝п 𝒚 , получим,
представляется
произведения отношений правдоподобия 𝑙
в
виде
для различных периодов
повторения
𝑙 ,→ 𝑙
𝑙
𝑝сп 𝒚 /𝑝п 𝒚
Тогда в качестве достаточной статистики удобно использовать
логарифм отношения правдоподобия, позволяющий не умножать, а
складывать частные отношения прадоподобия для каждого импульса
𝑙𝑛 𝑙
𝑙𝑛 𝑙 .
(3.89)
Если некогерентная пачка состоит из когерентных радиоимпульсов с
независимыми случайными начальными фазами (нефлуктуирующая по
амплитуде некогерентная пачка), то в силу (3.65) имеем
𝑙𝑛 𝐼 𝑞 𝑍н
𝑙𝑛 𝑙
const.
(3.90)
График функции 𝑙𝑛 𝛪 и показан на рис. 3.20.
Эта функция на начальном участке при при и
1:
квадратичную зависимость, а длалее линейную при и
и /4,
и,
𝑙𝑛 𝛪 и
и
и
1 имеет
1,
1.
(3.91)
Тогда с учетом (3.89) – (3.91) запишем
𝑙𝑛 𝑙
𝑞 𝑍н
const, 𝑞
1,
(3.92)
𝑙𝑛 𝑙
Соотношение
𝑞 𝑍н
(3.92)
const, 𝑞
1.
свидетельствует
о
необходимости
некогерентного междупериодного накопления (суммирования) импульсов
154
пачки, т.е. накопления после детектирования. Вид детектирования зависит
от отношения сигнал – шум 𝑞 . Для нефлуктуирующей пачки он является
квадратичным при 𝑞
1 и линейным при 𝑞
1.
ln I0 (u)
Рис. 3.20. График функции 𝑙𝑛 𝛪 и
Для некогерентной пачки с независимыми случайными начальными
фазами
и
независимыми
рэлеевскими
амплитудами
когерентных
радиоимпульсов (см. (3.77)) логарифмы отношения правдоподобия равны
𝑞 𝑍н
4 1 𝑞 /2
𝑙𝑛 𝑙
М
𝑙𝑛 𝑙
(3.93)
𝑐𝑜𝑛𝑠𝑡,
𝑞 𝑍н
4 1 𝑞 /2
𝑐𝑜𝑛𝑠𝑡.
(3.94)
Согласно (3.94) в случае независимых рэлеевских флуктуаций
некогерентное
междупериодное
квадратичного
накопление
детектирования
при
осуществляется
любой
после
интенсивности
радиоимпульсов.
Структурная
радиоимпульсов,
схема
построенная
обнаружителя
в
некогерентной
соответствии
представлена на рис. 3.21, а.
155
с
(3.92)
и
пачки
(3.94),
Д
СФОИ
1
1
2
2
3
∑
4
5
6
3
п
t
4
а
5
6
б
Рис. 3.21. Обнаружитель некогерентной пачки радиоимпульсов
Фильтр, согласованный с одиночным радиоимпульсом (СФОИ),
когерентно (с учетом фазы) накапливает энергию каждого радиоимпульса
(когерентное внутрипериодное накопление). На выходе линейного 𝛾
или квадратичного 𝛾
1
2 амплитудного детектора (Д) обеспечивается
вычисление модулей нормированных весовых интегралов или их
квадратов. При этом на вход фильтра подается нормированное по уровню
шума напряжение.
Принцип междупериодного некогерентного накопления импульсов
пачки для 𝑀
накопителя
5 поясняет Рис. 3.21, б. В качестве некогерентного
используется
видеочастотный
фильтр,
включающий
многоотводную линию задержки, весовые усилители с коэффициентами
усиления 𝐾 и сумматор (Рис. 3.21, а). В определенный момент времени на
выходе накопителя формируется весовая сумма (логарифм отношения
правдоподобия) 𝑙𝑛 𝑙
∑ 𝐾 𝑍н
. Значения 𝐾 и 𝛾определяются из (3.92)
и (3.94). Вид детектирования (линейное 𝛾
указан выше. Коэффициенты усиления 𝐾
1 или квадратичное 𝛾
для некогерентной пачки
радиоимпульсами со случайными начальными фазами равны 𝐾
𝑞
1 и 𝐾
𝑞
при 𝑞
2 )
𝑞 при
1 (см.(3.92)), а для пачки импульсов со
156
случайными начальными фазами и рэлеевскими амплитудами – 𝐾
при 𝑞
1и𝐾
const при 𝑞
𝑞
1 (см. (3.94)).
Однако, на практике соблюдение столь детализированных условий
зачастую не требуется. Например, пороговое значение параметра
обнаружения (коэффициента различимости) мало зависит от характера
детектирования.
Так,
для
нефлуктуирующей
некогерентной
радиоимпульсов со случайными начальными фазами при 𝑞
пачки
1и𝑀
10
оптимальное линейное детектирование дает выигрыш в энергетическом
отношении сигнал – шум всего лишь на 2,5% по сравнению с
неоптимальным квадратичным. Поэтому линейное детектирование в
радиолокационной практике используется крайне редко.
157
3.5.2. Показатели качества обнаружения некогерентной пачки
радиоимпульсов
На основе результатов п. 3.5.1 проведем анализ показателей качества
обнаружения,
ограничиваясь
случаем
равновесного
квадратичного
суммирования
(суммирования
после
𝐾
const
квадратичного
детектирования). Приведем сравнительный анализ показателей качества
обнаружения некогерентной и когерентной пачек радиоимпульсов на фоне
белого гауссова шума. В частности, сравним величину коэффициентов
различимости одного импульса пачки 𝐾разл
𝑞и /2
Эи /𝑁 , которые
требуются для обнаружения когерентной и некогерентной пачек при
заданных 𝐷 и 𝐹.
На Рис. 3.22 приведены зависимости коэффициента различимости
одного импульса пачки Эи /𝑁 от их числа 𝑀 при некогерентном (линии
1,2,3) и когерентном (линии 4,5) накоплении для 𝐷
Эи
, дБ
N0
15
10
2
3
1
4
0,8, 𝐹
10 .
5
5
0
5
1,2
1
3
10
30
100
Рис. 3.22. Зависимости различимости для одного импульса пачки
от числа M некогерентно (1, 2, 3) и когерентно (4, 5)
накапливаемых импульсов при D = 0,8 и F = 10-6
Прямая 4 относится к когерентной пачке со случайной начальной
фазой и с одинаковой нефлюктуирующей амплитудой каждого импульса.
При 𝑀
1 коэффициент различимости
одиночного радиоимпульса
составляет 12,5 дБ, что согласуется с соответствующей для 𝐹
10
кривой обнаружения одиночного когерентного сигнала со случайной
начальной фазой (см. рис. 3.16). Анализ этого случая показывает, что при
158
числе 𝛭 когерентных импульсов каждый отдельный импульс пачки может
иметь при тех же 𝐷, 𝐹в 𝑀 раз (на 10 𝑙𝑔 𝛭дБ) меньшую по сравнению с
пачкой энергию, т.е. коэффициент различимости в децибелах описывается
пропорциональной зависимостью
Эи /𝑁 ,дБ
𝐾р 𝛭 ,дБ
Например, при 𝐾 1
𝐾р 1
2,5дБ для 𝐷
10lgΜ, дБ.
0,8, 𝐹
10
(Рис. 3.16) для
одного импульса 10-элементной пачки. Это обусловлено когерентным
междупериодным накоплением импульсов пачки.
Кривая 1 (Рис. 3.22) относится к нефлуктуирующей некогерентной
пачке
радиоимпульсов
квадратичном
со
случайными
суммировании.
начальными
Некогерентное
фазами
при
междупериодное
накопление также позволяет понизить пороговый уровень энергии каждого
импульса пачки. Однако по сравнению с когерентным накоплением, при
некогерентном накоплении возникают энергетические потери. Разница в
децибелах между кривой 1 и прямой 4 характеризует величину этих потерь
для произвольного значения 𝑀. График потерь показан на рис. 3.23. Для
поддержания заданного значения 𝐹 приходится повышать уровень порога,
а чтобы обеспечить при этом заданное значение 𝐷 требуется большая
энергия сигнала.
Отметим, что потери на Рис. 3.23 не прямо пропорциональны размеру
пачки, как это можно было ожидать, исходя из того, что некогерентное
накопление пачки не улучшает ОСШ по сравнению с этим отношением для
одного импульса. Дело в том, что при некогерентном накоплении шум
перестает быть гауссовым, так как после возведения в квадрат, его
распределение определяется не нормальным, а 𝜒 законом. Он показывает,
что сумма 𝑆из 2𝑁 квадратов нормальных величин (квадратурных
составляющих
шума
с
половинной
распределение вида
159
дисперсией
𝜎ш
1/2)
имеет
𝑝 𝑆, 1/2
1
𝑆
Г 𝑀
𝑒
где Г 𝑀 – гамма-функция Г 𝑀
𝑀
𝑝 𝑆, 1/2 𝑑𝑆
Заметим, что
, 𝑆
0 ,
(3.95)
1 !
1, и тогда показатели качества
обнаружения здесь имеют другие зависимости по сравнению с ранее
полученными для шума с нормальным законом (см. например 3.81). В этом
случае для условной ВЛТ имеем
𝐹
1
𝜒 𝑆 ,𝑀
,𝜒 𝑆 ,𝑀
Г 𝑀
𝑆
𝑒
𝑑𝑆.
(3.96)
Таким образом, именно различия в законах распределения и
определяют
непропорциональность
энергетических
потерь
числу
Потери, дБ
импульсов 𝑀 в пачке при некогерентном накопления.
D 0 , 8 ; F 10
6
Число импульсов, M
Рис. 3.23. График потерь некогерентного накопления
импульсов нефлуктуирующей пачки
Несмотря на энергетические потери некогерентного межпериодного
накопления, по сравнению с когерентным, тем не менее, оно часто бывает
полезным,
например
при
обнаружении
некогерентной
пачки
радиоимпульсов. В этом случае некогерентное накопление позволяет
уменьшить коэффициент различимости в расчете на один импульс пачки,
т.е. уменьшить энергию каждого импульса пачки.
Более того, анализ Рис. 3.23 показывает, что при небольшом
количестве импульсов потери некогерентного суммирования сравнительно
небольшие. Например, при 𝑀
10 𝐷
160
0,8, 𝐹
10
они составляют
приблизительно 2 дБ (1,58 раз). В этой связи на практике при обнаружении
когерентной
пачки
и
𝑀
небольшом
иногда
отказываются
от
сложнореализуемого когерентного междупериодного накопления на
радиочастоте
и
переходят
к
более
простому
(неоптимальному)
некогерентному накоплению на видеочастоте. В то же время с ростом 𝑀
рассматриваемые потери становятся значительными, при 𝑀
1000 они
составляют уже 9 дБ ( 8 раз).
Снова обратимся к Рис. 3.22 и прокомментируем кривые 2, 3 и 5.
Кривая 2 относится к независимым («быстрым») рэлеевским
флуктуациям импульсов пачки. Под «быстрыми» флюктуациями следует
понимать изменение амплитуд импульсов за время длительности пачки,
т.е. от импульса к импульсу. Для 𝑀
1 значение Э/𝑁 =17,7 дБ согласуется
с кривой обнаружения на рис. 3.16 для одиночного радиоимпульса с
рэлеевскими флуктуациями амплитуды при 𝐹
Кривая
3
относится
к
дружным
10 .
(«медленным»)
рэлеевским
флуктуациям импульсов некогерентной пачки. Под «медленными»
флюктуациями следует понимать постоянство амплитуд импульсов за
время длительности пачки. При 𝑀
1 кривые 2 и 3 на Рис. 3.22
пересекаются (начинаются из одной точки), так как разграничение на
«дружные» и «быстрые» флуктуации теряет физический смысл.
Прямая
5
соответствует
когерентному
накоплению
дружно
флуктуирующих по закону Рэлея импульсов пачки. Из хода приведенных
зависимостей следует, что при дружных флуктуациях пачки потери для
различных 𝐷и 𝐹 можно ориентировочно оценить по кривым Рис. 3.16. Эти
кривые построены для когерентных сигналов для 𝑀
1.
Важно отметить, что при независимых («быстрых») флуктуациях эти
потери снижаются по мере увеличения 𝑀. Этот факт иногда используется
для повышения энергетического потенциала РЛС за счет перехода от
161
одночастотной к многочастотной работе (в иностранной литературе режим
“diversity”).
162
4. СОГЛАСОВАННАЯ ОБРАБОТКА КОГЕРЕНТНЫХ
РАДИОЛОКАЦИОННЫХ СИГНАЛОВ. ФУНКЦИИ
РАССОГЛАСОВАНИЯ (НЕОПРЕДЕЛЕННОСТИ).
Раздел
посвящен
вопросам
теории
согласованной
фильтрации
радиолокационных сигналов и анализу согласованных фильтров (СФ), как
оптимальных обнаружителей на фоне белого гауcсового шума. В отличие от
корреляторов, синтезированных в разделе 3, СФ инвариантны ко времени прихода
сигнала. В рассмотрение вводятся и исследуются функции рассогласования
(неопределенности) сигналов, определяющие отклик СФ при рассогласовании их
параметров относительно ожидаемых значений. Свойства и характеристики функций
неопределенности устанавливаются для основных типов простых и сложных
радиолокационных сигналов.
4.1.
В
разделе
Согласованные фильтры и их характеристики
3
показано,
что
применение
многоканального
корреляционного обнаружителя целесообразно в том случае, когда
априорный интервал возможного изменения времени запаздывания
сигнала 𝑡з является небольшим. Это может иметь место, например, при
наличии в РЛС целеуказания. При заведомо широком априорном
интервале изменения параметра 𝑡з практический интерес представляют
инвариантные ко времени запаздывания фильтровые обнаружители.
4.1.1. Импульсная характеристика согласованного фильтра
Напомним, что импульсная характеристика (ИХ) любого линейного
фильтра представляет собой отклик 𝑣 𝑡 на дельтаобразное воздействие
𝛿 𝑡 , поданое в момент времени 𝑡
0 при нулевых начальных условиях
(линейный фильтр свободен от начальных запасов энергии при 𝑡
Выходное напряжение 𝑤 𝑡
0).
линейного фильтра представляет собой
свертку входного напряжения с ИХ фильтра
w (t )
y ( s ) v ( t s ) ds
(4.1)
Это равенство называют формулой фильтрации во временной
области или интегралом свертки.
163
Согласованным с ожидаемым сигналом называют фильтр, который
учитывает его форму и последовательно во времени выдает значения,
пропорциональные
корреляционному
интегралу
при
различных
запаздываниях tз сигнала
𝑤 𝑡
𝑡
𝑦 𝑡 𝑥 𝑡
𝑧 𝑡
где 𝑡
𝐶 𝑡 .
(4.2)
𝑡 𝑑𝑡,
(4.3)
– время задержки сигнала в фильтре, C – коэффициент
пропорциональности.
Чем дальше от радиолокатора находится цель, тем больше
запаздывание отраженного сигнала 𝑡 и тем позже формируется отклик
фильтра на этот сигнал. Связь огибающей выходного напряжения
согласованного фильтра (4.2) с модулем корреляционного интеграла (4.3)
показана в Приложении 4.
Определим импульсную характеристику согласованного фильтра.
Для этого воспользуемся (4.1) – (4.3) и потребуем
y(s) v(t
0
tз s) ds C y(s) х(s tз ) ds
.
Данное равенство выполняется, при условии
(t0 t з s) Cx(s t з )
При этом выходное напряжение фильтра 𝑤 𝑡
(4.4)
изменяется в
зависимости от времени так же, как и корреляционный интеграл от
параметра 𝑡з . Иными словами, текущее время, отсчитываемое от
некоторого момента (например, от момента излучения зондирующего
сигнала), есть ожидаемое время запаздывания сигнала. Обозначая
t0 tз s t , после перестановки слагаемых имеем s tз t0 t . Из (4.4)
164
можно
получить
выражение
для
ИХ
согласованного
фильтра
в
несимметричной форме записи
согл(t ) Cx(t0 t ).
Построение
ИХ
фильтра,
(4.5)
согласованного
с
прямоугольным
радиоимпульсом без внутриимпульсной модуляции длительностью
соответствии с (4.5) для ( С
1)
и , в
иллюстрирует рис. 4.1. Эта характеристика
представляет собой копию ожидаемого сигнала, которая, во-первых,
отображается "зеркально" по отношению к сигналу на оси времени
относительно вертикальной прямойt 0 , а во-вторых – смещается вправо на
величину t0 .
0
Рис. 4.1. Построение ИХ СФ (согласно 4.5)
Подстановка 𝑡
форме
записи
приращений 𝛾
𝛾 в (4.5) при C
выражения
𝑡
1
для
ИХ
СФ
t
2
приводит к симметричной
относительно
временных
𝑡 /2:
t
2
согл 0 x 0 .
(4.6)
Таким образом, ИХ согласованного фильтра строится путем
зеркального
отображения
ожидаемого
вертикальной прямой t t0 / 2 (рис. 4.2).
165
сигнала
x(t) относительно
x (t )
зеркало
согл ( t )
x (t )
0
𝑡0
2
0
t
ИХ
𝑡0
2
0
и
и
согл ( t )
ϒ
ϒ
СИГНАЛ
а
t
б
Рис. 4.2. Построение ИХ СФ
(согласно 4.6)
На рис. 4.2, а в соответствии с (4.6) поясняется построение ИХ
фильтра,
согласованного
с
прямоугольным
радиоимпульсом
без
внутриимпульсной модуляции, а на рис. 4.2, б – согласованного с частотномодулированным радиоимпульсом.
При построении ИХ СФ, например, для частотно-модулированного
сигнала
x(t )
радиоимпульс
зеркальность отображения проявляется в том, что
x(t )
с нарастающей частотой колебаний отображается в
радиоимпульс (импульсную характеристику)
согл (t ) с убывающей
частотой колебаний.
На рис. 4.2 вертикальная прямая t t0 / 2, относительно которой
строится зеркальное отображение сигнала, для наглядности вынесена за
его пределы. В этом случае t0 t0min. Исходя из условия физической
реализуемости фильтра
𝑣согл 𝑡
0 для 𝑡
0
минимальная задержка
t0 min соответствует длительности сигнала и .При t0 t0min условие
физической реализуемости фильтра нарушается. В этом можно убедиться,
построив ИХ показанную на Рис. 4.1, но для t0 и .
ИХ
фильтра,
согласованного
с
одиночным
частотно-
модулированным радиоимпульсом, при минимальном времени задержки
t0 t0min и показана на Рис. 4.3.
166
Таким образом, для высокочастотных сигналов ИХ согласованных
фильтров являются зеркальными высокочастотными колебаниями. Так,
ИХ
фильтра,
согласованного
с
одиночным
радиоимпульсом
без
внутриимпульсной модуляции, представляет собой также одиночный
радиоимпульс без внутриимпульсной модуляции (Рис. 4.2, а). Для фильтра,
согласованного с радиоимпульсом с внутриимпульсной модуляцией, она
сводится к радиоимпульсу с внутриимпульсной модуляцией (Рис. 4.2, б).
Определим комплексную амплитуду Vсогл(t ) ИХ согласованного
фильтра.
Для
этого
воспользуемся
соотношением
(4.5),
которое
представим в виде
vсогл (t ) Re Vсогл (t ) exp( j 2f 0t )
C x (t0 t ) C Re X (t0 t ) exp( j 2f 0 (t0 t ) .
(4.7)
τи
x(t)
0
t
vсогл(t)
vсогл(t) = x(t0min – t)
0
t
t0min /2
Рис. 4.3. Построение импульсной характеристики СФ при 𝑡
𝑡
Под знаком реальной части Re {X (t0 t) exp(j2f 0 (t0 t))} комплексная
функция может быть заменена на комплексно-сопряженную, т.е.
x(t0 t) Re X *(t0 t)exp(j2f0 (t t0 )) .
(4.8)
С учетом (4.8) равенство (4.7) перепишем в следующем виде:
Re Vсогл(t ) exp(j 2f0t ) С Re X * (t0 t ) exp( j 2f0t0 ) exp(j 2f0t ) .
Сопоставляя в нем коэффициенты при одинаковых множителях
высокочастотного заполнения exp( j 2 f 0 t ) , окончательно получим
167
Vсогл(t ) C X * (t0 t ) exp( j 2f0t0 ),
(4.9)
Итак, комплексная амплитуда Vсогл(t ) ИХ согласованного фильтра с
точностью до постоянного множителя C exp( j 2f0t0 ) равна комплексно*
сопряженной амплитуде ожидаемого сигнала X (t0 t) .
4.1.2. Частотная характеристика согласованного фильтра
Напомним,
что
комплексная
частотная
характеристика
K (f )
линейного фильтра представляет собой отношение комплексных амплитуд
гармонических колебаний на выходе и входе фильтра для каждой частоты
f
. Часто, особенно в инженерных расчетах, пользуются представлением
(f ) в показательной форме
частотной характеристики (ЧХ) K
K ( f ) K ( f ) exp(j arg Κ ( f )) K ( f ) exp(jк ( f )),
где
(4.10)
K ( f ) K ( f ) – амплитудно-частотная характеристика (АЧХ),
argK ( f ) k ( f ) – фазочастотная характеристика (ФЧХ).
При воздействии на вход линейного фильтра напряжения
спектральной
плотностью
напряжение фильтра
w (t )
спектром)
g y ( f )
со
выходное
имеет вид
w (t )
(частотным
y(t)
g
y
( f ) K ( f ) exp( j 2 ft ) df
(4.11)
-
Данное выражение называют формулой фильтрации в частотной
области.
Импульсная и частотная характеристики линейного фильтра связаны
преобразованиями Фурье
v (t )
K ( f ) exp( j 2ft ) df ,
168
(4.12)
K ( f )
v(t ) exp( j 2ft ) dt
(4.13)
Определим
частотную
характеристику
Kсогл(f )
согласованного
фильтра. Для этого воспользуемся соотношениями (4.5), (4.13) и получим
K согл ( f )
v
согл
(t ) exp( j 2 ft ) dt C
х (t
0
t ) exp( j 2 ft ) dt
Выполним замену переменной t0 t s приходим к соотношению
K согл ( f ) C x ( s ) exp( j 2 fs ) ds exp( j 2 ft 0 ).
Здесь квадратными скобками выделена комплексно-сопряженная
*
спектральная плотность ожидаемого сигнала. Обозначив ее через g x ( f ) ,
имеем
K согл ( f ) С g *x ( f ) exp( j 2ft0 ).
(4.14)
Таким образом, ЧХ СФ с точностью до постоянного множителя равна
произведению
комплексно-сопряженного
значения
спектральной
плотности ожидаемого сигнала и множителя запаздывания этого сигнала в
фильтре.
Исходя из (4.14), определим выражения для амплитудно-частотной и
фазочастотной характеристик СФ. Для этого представим (4.14) в виде
K согл ( f ) exp( j arg K согл ( f )) С g x ( f ) exp( j[arg g x ( f ) 2ft0 ]).
Равенство двух комплексных функций означает равенство их
модулей и аргументов.
Следовательно,
амплитудно-частотная
характеристика
согласованного фильтра
K согл ( f ) С g x ( f )
169
(4.15)
соответствует амплитудно-частотному спектру (АЧС) сигнала.
Она в общем случае неравномерна (Рис. 4.4). В (4.15) константа
C
, в
отличие от (4.5), является размерной, обратной размерности АЧС сигнала.
Фазочастотная характеристика (ФЧХ) согласованного фильтра
равна
𝑎𝑟𝑔𝐾согл 𝑓
𝑎𝑟𝑔𝑔 𝑓
2𝜋𝑓𝑡
(4.16)
т.е. она противоположна по знаку фазочастотному спектру (ФЧС)
сигнала с точностью до слагаемого, учитывающего запаздывание сигнала
в фильтре (Рис. 4.5).
Для пояснения физического смысла соотношений (4.14) – (4.16)
определим напряжение сигнала wc (t ) на выходе согласованного фильтра в
момент времени t t0 tз .
𝐾согл 𝑓
𝐾согл 𝑓
|𝑔𝑥 𝑓 |
C=1
|𝑔𝑥 𝑓 |
0
f
Рис. 4.4. Амплитудно-частотная характеристика согласованного фильтра
arg 𝐾согл 𝑓
ФЧС
arg 𝑔𝑥 𝑓
f
arg 𝑔𝑥 𝑓
0
2𝜋𝑓𝑡0
ФЧХ
Рис. 4.5. Фазочастотная частота характеристика согласованного фильтра
Сигнал x(t t з ) , приходящий с запаздыванием t
з
, характеризуется
спектральной плотностью
g у ( f ) g x ( f ) еxp( j 2ftз )
170
,
(4.17)
где g х ( f ) g x ( f ) еxp( jx ( f )) – спектральная плотность сигнала без
запаздывания, а х ( f ) argg х ( f ) .
Подставим (4.15 - 4.17) в формулу фильтрации в частотной области
(4.14) при t t0 tз и для сигнала на выходе СФ получим
wc (t0 t з ) С g x ( f )
2
exp j x ( f ) x ( f ) 2ft з 2ft з 2ft0 2ft0 df
(4.18)
C g x ( f ) df .
2
Из данного выражения следует, что в момент времени t0 tз
0
ФЧХ согласованного фильтра. Компенсируются
t
f2
u2(t)
0
также фазовые сдвиги сигнала, обусловленные
t
запаздываниями t з и t0 . Поэтому, непрерывные
f3
u3(t)
0
t
w(t)
0
фазочастотный спектр сигнала компенсируется
f1
u1(t)
u1 + u2 + u3
t0 + t 3
гармонические составляющие в момент t0 tз
складываются
t
Рис. 4.6. Формирование
сигнального пика на
выходе согласованного
фильтра
образуется
в
пик
фазе
и
сигнала,
на
что
выходе
СФ
упрощенно
поясняет рис. 4.6 на примере трех гармоник.
Гармонические
составляющие
сигнала
приобретают в СФ также амплитудный вес (см.
формулу (4.13)), пропорциональный их вкладу в АЧС сигнала (формула
(4.15) и Рис. 4.4), т.е. чем больше амплитуда гармонического колебания,
тем больший вес ему придается. При этом слабым составляющим сигнала
относительно шума придается малый вес. В результате СФ искажает
сигнал, обеспечивая наилучшее выделение его пика на фоне шума.
Этот принцип соответствует обычной жизненной логике. Представим, что мы распределяем
ограниченный объем питания, между участниками команды на соревнованиях по "перетягиванию
каната". Если вклад каждого зависит от объема съеденного, то логично распределить еду
пропорционально вкладу (силе) каждого спортсмена, рассчитывая на наилучший результат команды.
Таким образом, согласованная фильтрация сигнала сводится к
коррекции(подбору)
фазовых
соотношений
171
между
отдельными
спектральными компонентами и амплитудному "взвешиванию" этих
компонент.
172
4.1.3. Отношение сигнал/шум на выходе согласованного фильтра
Отношением сигнал/шум по напряжению (q) на выходе СФ называют
отношение
пикового
напряжения
выходного
сигнала
𝑤
пик
к
среднеквадратичному значению напряжения шума 𝜎ш :
q
wс пик
(4.19)
ш
Определим числитель и знаменатель этого отношения и получим
выражение для параметра
q
. Пиковое значение сигнала на выходе СФ в
силу (4.18) равно
wс пик wc (t 0 t з ) С g x ( f )
2
df С х 2 (t ) dt СЭ ,
(4.20)
где Э – энергия сигнала на единичном сопротивлении.
Дисперсия (средняя мощность на единичном сопротивлении) шума
ш2 на выходе СФ составляет
ш2 N ( f ) K согл ( f )
2
df ,
-
где N( f ) N0 / 2 ( f ) для спектральная плотность мощности
белого шума на входе СФ.
Поскольку K согл ( f ) 2 С 2 g x ( f ) 2 (см. (4.15)), имеем
ш2 C 2
N0
2
g x ( f )
2
df C 2 ЭN 0 / 2
(4.21)
-
Используя (4.20) и (4.21), получим
q
wc пик
ш
CЭ
С ЭN 0 /
2Э
.
N0
(4.22)
Таким образом, отношение сигнал/шум по напряжению на выходе
СФ зависит от энергии сигнала и спектральной плотности мощности
шума. Оно не зависит от формы и ширины спектра сигнала. Это
справедливо и для ОСШ по мгновенной мощности.
173
q2
Существенно,
что
ни
2Э
N0
(4.23)
один
линейный
фильтр
в
условиях
стационарного белого шума не может обеспечить на своем выходе ОСШ
большего, чем СФ. В противном случае, заменив им СФ в оптимальном
приемнике, можно было бы получить большую условную вероятность
правильного обнаружения
D
при заданной вероятности ложной тревоги F.
СФ также называют оптимальным, оговаривая, что оптимальность имеет
место при обнаружении сигнала на фоне белого стационарного шума.
Такой оптимальный приемник обеспечивает наивысшую вероятность
при заданной вероятности
F.
D
Следовательно, оптимальный фильтр этого
приемника при заданных условиях обеспечивает отношение сигнал/шум,
наивысшее по сравнению с другими линейными фильтрами.
Заметим, что значение ОСШ (4.22) не зависит от константы
C
(см.
(4.21)), определяющей общий уровень усиления, так как оно не изменяется
при включении широкополосных усилительных каскадов на входе или
выходе СФ.При этом собственные шумы этих каскадов должны быть
существенно слабее усиленных входных шумов приемника.
Проанализируем
(корреляционную
спектральную
функцию)
шума
плотность
и
мощности
спектральную
плотность
(огибающую) сигнала на выходе СФ. Спектральная плотность сигнала на
его выходе равна
g выx ( f ) g x ( f ) K согл ( f ) С g x ( f )
2
ехр( j 2ft0 ),
т.е. АЧС сигнала на выходе фильтра соответствует квадрату АЧС
входного сигнала. Выходной сигнал определяется преобразованием Фурье
от спектральной плотности gвых(f ) . При этом длительность выходного
радиоимпульса
входного
вых примерно равна 1/ fи , где fи – ширина спектра
радиоимпульса.
Следовательно,
174
при
прохождении
радиоимпульсов с внутриимпульсной модуляцией (когда Б f и и 1 )
вх и Б / fи
длительностью
сжимаются во времени в
Б
через
согласованный
фильтр
они
раз. Величину Б в литературе называют базой
сигнала.
Теперь рассмотрим прохождение помехи через СФ. Если на вход
фильтра поступает белый шум, то на его выходе образуется “окрашеный"
(небелый) шум со спектральной плотностью мощности, определяемой
квадратом АЧХ фильтра, т.е. квадратом АЧС входного сигнала
N вых ( f ) N ( f ) Κ согл ( f )
Отсюда
вых ( )
Ν
вых
следует,
что
( f ) exp( j 2 f ) df
2
2
Ν 0 C 2 g x ( f ) / 2
корреляционная
и
огибающая
(4.24)
функция
сигнала
на
шума
выходе
согласованного фильтра, в отличие от его входа, совпадают по форме.
Иначе говоря, в результате обработки отдельные (некоррелированные на
выходе) выборки шума стали "похожими" на выходной сигнал.
Из (4.24) также следует, что СФ"не пропускает частотные
компоненты шума, лежащие вне полосы частот, занимаемойсигналом, так
как он согласован с сигналом по полосе.
4.2.
Согласованные фильтровые обнаружители когерентных
сигналов
Предположим, что время запаздывания сигнала tз неизвестно, а
доплеровская частота Fд известна. Выше было доказано, что фильтровые
обнаружители инвариантны ко времени запаздывания, и поэтому при
известной доплеровской частоте являются одноканальными. Так, для
сигнала с известными начальной фазой и амплитудой согласованный
фильтр последовательно во времени выдает значения, пропорциональные
корреляционному
интегралу
z (t з ) .
175
При
различных
значениях
запаздывания 𝑡
схемы согласованных фильтровых обнаружителей с
плавающим и фиксированным порогами представлены соответственно на
Рис. 4.7а и Рис. 4.7б.
При обнаружении сигнала со случайной начальной фазой и сигнала
со случайными амплитудой и начальной
фазой необходимовычислять
модуль комплексного корреляционного интеграла 𝑍
Приложении
4
показано,
что
модульное
𝑍 (см. раздел 3). В
значение
комплексного
корреляционного интеграла определяется огибающей напряжения на
выходе согласованного фильтра
W (t )
(рис. 4.8, б) в момент времени
t0 tз (С 1) :
𝑊 𝑡
𝑍 𝑡 .
𝑡
(4.25)
Огибающую напряжения на выходе СФ можно получить путем
амплитудного
детектирования
его
выходного
напряжения.
Схема
согласованного обнаружителя сигнала со случайными начальной фазой и
амплитудой при неизвестном tз и известной Fд представлена на Рис. 4.8а.
𝑦 𝑡
СФ
𝑤 𝑡1
𝑧 𝑡3
𝑡3
ПУ
𝐴 1, 0
𝐴 1, 0
𝑦 𝑡
СФ
ПУ
2/Э𝑁0
𝑧0
𝑧0н
а
б
Рис. 4.7. Согласованные фильтровые обнаружители сигнала с известными
начальной фазой, амплитудой, доплеровской частотой и неизвестным
временем запаздывания при плавающем (а) и фиксированном (б) порогах
𝑤 𝑡
𝑦 𝑡
СФ
𝑊 𝑡0
𝑊 𝑡
АД
𝑍 𝑡3
𝑡3
ПУ
𝑍0
𝑡0
а
𝑡3
𝑡
б
Рис. 4.8. Согласованный фильтровой обнаружитель сигнала со
случайными начальной фазой и амплитудой, неизвестным t и известным
F (а) и огибающая на выходе амплитудного детектора (б)
з
д
176
На этом рисунке введено обозначение: АД – амплитудный детектор.
При вычислении модуля комплексного корреляционного интеграла
Z
одноканальное фильтровое устройство (СФ + АД) заменяет двухканальное
корреляционное устройство с квадратурными подканалами (Рис. 3.13).
Таким образом, в одноканальном устройстве обеспечивается оптимизация
обнаружения сигнала со случайными начальной фазой и амплитудой в
произвольном
диапазоне
временных
запаздываний
t3.
На
выходе
амплитудного детектора вырабатываются последовательные значения
Z(tз ) (Рис. 4.8, б) для различных t3. Корреляционный же обнаружитель
является многоканальным по временной задержке t3 (сравните Рис. 4.8, а и
Рис. 3.17).
При
неизвестной
доплеровской
частоте
сигнала
фильтровой
обнаружитель представляет собой многоканальное устройство (рис. 4.9, а),
содержащее набор согласованных фильтров, настроенных на различные
значения параметра 𝐹д в априорно ожидаемом диапазоне его изменения.
СФ(Fд1)
АД
ПУ
𝑍0
𝑦 𝑡
СФ(Fд2)
АД
1 2
m‐1m
3
ПУ
𝑍0
СФ(Fдm)
АД
a
f
ПУ
𝑍0
б
Рис. 4.9. Согласованный фильтровой обнаружитель сигнала с
неизвестными t3 и Fд (а) и АЧХ согласованных фильтров (б)
Возможный вид АЧХ согласованных фильтров показан на Рис. 4.9, б.
Количество m СФ определяется отношением ожидаемого диапазона
изменения доплеровской частоты 𝐹д
𝐹д
к мере разрешающей
способности по доплеровской частоте ΔFД (см. подраздел 1.5.2).
Отметим,
что
при
фильтрации
одиночных
радиоимпульсов
сравнительно небольшой длительности в обнаружителе достаточно иметь
177
лишь один канал, поскольку для таких сигналов мера разрешающей
способности по доплеровской частоте ∆𝐹
1/𝜏и может существенно
превышать априорный интервал изменения этой частоты.
178
4.3.
Примеры фильтровых устройств согласованной обработки
радиолокационных сигналов
Согласованный фильтр можно построить либо по импульсной, либо
по частотной характеристике, которые однозначно взаимосвязаны между
собой. Выбор того или иного способа диктуется простотой вычислений,
удобством получения данных и т.д. Рассмотрим примеры синтеза и анализа
СФ для наиболее распространненных радиолокационных сигналов,
приведенных в Приложении 1.
4.3.1. Согласованная фильтрация одиночного радиоимпульса без
внутриимпульсной модуляции
Рассмотрим
прямоугольный
радиоимпульс
внутриимпульсной модуляции длительностью 𝜏и
колебаний
высокой
частоты,
n
–
x(t)
без
𝑛𝑇 , где 𝑇 – период
количество
периодов.
Радиоимпульсыобычно содержат большое число периодов колебаний, но
для наглядности положим n = 3 (рис. 4.10).
x(t)
T0
0
t
τи
Рис. 4.10. Прямоугольный импульс
𝑐𝑜𝑠2𝜋𝑓 𝑡, 0 𝑡
𝑡 0, 𝑡
0,
𝑥 𝑡
𝜏и
𝜏и
(4.26)
Найдем импульсную характеристику 𝜐согл 𝑡 , построим СФ и
проанализируем прохождение через него сигнала, если время задержки
сигнала в фильтре 𝑡
𝑡
𝑡и , а коэффициент пропорциональности
С = 1.
Для определения ИХ СФ воспользуемся (4.5) и для С = 1 запишем
179
𝜐согл 𝑡
𝑥 𝑡
𝑡
𝑐𝑜𝑠2𝜋𝑓 𝑡 для интервала времени 0
По условию задачи 𝑥 𝑡
𝑡
𝜏и
Поэтому после использования тригонометрического равенства
cos 𝛼
𝛽
𝜈согл 𝑡
𝑐𝑜𝑠𝛼𝑐𝑜𝑠𝛽
𝑠𝑖𝑛𝛼𝑠𝑖𝑛𝛽 ИХ примет вид.
𝑐𝑜𝑠2𝜋𝑓 𝑡
𝑡
𝜏и
3𝑇
Поскольку𝑡
𝑐𝑜𝑠2𝜋𝑓 𝑡 𝑐𝑜𝑠2𝜋𝑓 𝑡
3⁄𝑓 ,
то
𝑠𝑖𝑛2𝜋𝑓 𝑡 𝑠𝑖𝑛2𝜋𝑓 𝑡
𝑠𝑖𝑛2𝜋𝑓 𝑡
0, 𝑐𝑜𝑠2𝜋𝑓 𝑡
1.
Следовательно, для ИХ, имеем
𝜈согл 𝑡
𝑐𝑜𝑠2𝜋𝑓 𝑡, 0 𝑡
𝑡 0, 𝑡
0,
𝜏и
𝜏и
(4.28)
т.е. ИХ фильтра, согласованного с прямоугольным радиоимпульсом без
внутриимпульсной модуляции длительностью 𝜏и , представляет собой
такой же радиоимпульс такой же длительности (Рис. 4.11).
Графическое построение ИХ СФ показано на Рис. 4.2. Для
наглядности на этом рисунке выбрано
время задержки 𝑡
𝜏и .
Для построения СФ напомним,
что ИХ есть реакция фильтра на
воздействие короткого импульса в
Рис. 4.11. Импульсная
характеристика фильтра,
согласованного с прямоугольным
радиоимпульсом без
внутриимпульсной модуляции
виде δ-функции. В рассматриваемом
случае такой реакцией должен быть
прямоугольный
частотой 𝑓
радиоимпульс
с
и длительностью 𝜏и .
(формула (4.27), Рис. 4.11). Так, реакцией идеального параллельного
колебательного
контура
на
δ-функцию
является
полубесконечное
гармоническое колебание частоты 𝑓 , которое описывается функцией
𝑐𝑜𝑠2𝜋𝑓 𝑡. Для обеспечения заданной длительности 𝜏и ИХ в состав СФ
включим линию задержки на время 𝜏и , инвертор (фазовращатель на 180)
и сумматор (рис. 4.12).
180
τи
1
φ
2
∑
3
4
Рис. 4.12. Фильтр, согласованный с прямоугольным радиоимпульсом без
внутриимпульсной модуляции
1
𝑡
𝑡
𝑡
𝑡
𝑡
𝑡
𝑡
𝑡
2
3
4
τи
2τи
а
𝑡3
б
Рис. 4.13. Формирование импульса
с частотным заполнением
𝑡0
Рис. 4.14. Результаты фильтрации
прямоугольного импульса
Суммирование незадержанного и задержанного инвертированного
колебаний приводит к образованию искомой вырезки из гармоники.
Процесс
фильтрации
прямоугольного
радиоимпульса
без
внутриимпульсной модуляции показан на Рис. 4.14. Из этого рисунка
видно, что в результате фильтрации на выходе СФ
образуется
радиоимпульс с треугольной огибающей длительностью 2𝜏и на нулевом
уровне, а в момент времени 𝑡
𝑡 – возникает пик сигнала. Именно в этот
момент достигается максимально возможное ОСШ.
Рассмотрим АЧХ синтезированного согласованного фильтра (Рис.
4.12). Как показано в п. 4.1.2, АЧХ согласованного фильтра соответствует
181
АЧС
|𝑔 𝑓 |, при 𝐶
сигнала: 𝐾согл 𝑓
1.
Прямоугольный
радиоимпульс без внутриимпульсной модуляции имеет спектральную
плотность вида
𝑔 𝑓
𝑠𝑖𝑛𝜋 𝑓 𝑓 𝜏и
2𝜋 𝑓 𝑓 𝜏и
𝑔 𝑓
𝑠𝑖𝑛𝜋 𝑓 𝑓 𝜏и
2𝜋 𝑓 𝑓 𝜏и
(4.29)
Его амплитудно-частотный спектр для f > 0 показан на Рис.
4.15штриховой линией. Сплошной линией на этом рисунке показана
амплитудно-частотная характеристика согласованного фильтра. Ширина
АЧХ СФ по уровню 0,64 составляет Δ𝑓
1⁄𝜏и .
Отметим, что несмотря на кажущуюся простоту, реализация
рассмотренного аналогового СФ встречает определенные технические
затруднения. Во-первых, для обеспечения необходимой формы ИХ
добротность колебательного контура должна быть очень высокой. Вовторых, линия задержки должна обеспечить стабильную во времени
задержку с точностью до малых долей периода высокочастотного
заполнения 𝑇
1⁄𝑓 .
g x( f )
K согл ( f )
K согл ( f )
g x( f )
Δfи 1 / и
0
f0
f
Рис. 4.15. Амплитудно-частотная характеристика СФ (сплошная линия) и
амплитудно-частотный спектр
K(f)
АЧХ квазисогласованного
фильтра
АЧХ СФ
0
1, 37 / и
f
Рис. 4.16. Амплитудно-частотные характеристики квазисогласованного
(сплошная линия) и согласованного (штриховая линия) фильтров
182
W (t )
Рис. 4.17. Огибающая сигнала на выходе согласованного (штриховая
линия) и квазисогласованного (сплошная линия) по В.И. Сифорову
фильтров
Эти трудности часто определяют необходимость перехода к более
простым в реализации квазисогласованным фильтрам. Таким фильтром
может
быть,
например,
полосовой
фильтр.
Форма
АЧХ
квазисогласованного фильтра отличается от формы АЧС сигнала и
соответственно от формы АЧХ согласованного фильтра (Рис. 4.16). Это
приводит к изменению формы выходного сигнала (Рис. 4.17) и
энергетическим потерям.
В Приложении 5 показано, что ОСШ по мгновенной мощности на
выходе квазисогласованного фильтра 𝑞ксф определяется в виде
𝑞ксф
2 Э⁄𝑁 – ОСШ на выходе СФ;
где 𝑞сф
𝑎
𝑆𝑖 𝑦
𝑎𝑞сф
∆ и и
/
∆
и
1 – коэффициент потерь;
𝑑𝑥 – интегральный синус.
Оптимизация полосыпропускания квазисогласованного фильтра,
проведенная В. И. Сифоровым, показала, что ∆𝑓опт
1,37⁄𝜏и . При этом
коэффициент потерь a = 0,83, т.е. проигрыш в энергетическом ОСШ по
сравнению с СФ составляет лишь 17%.
183
Перейдем к рассмотрению примера согласованной фильтрации
колокольного радиоимпульса без внутриимпульсной модуляции. Такой
радиоимпульс (Рис. 4.18) описывается выражением
𝑥 𝑡
exp
𝜋 𝑡⁄𝜏и
cos 2𝜋𝑓 𝑡 ,
𝜋⁄4
где 𝜏и – длительность радиоимпульса на уровне exp
0,46.
Синтез СФ удобно провести на основе ЧХ (4.14) сигнала.
Колокольный радиоимпульс имеет спектральную плотность вида
𝑔 𝑓
𝑔 𝑓
𝜏и
exp
2
𝜋 𝑓
𝑓
𝜏и
exp
𝜋 𝑓
𝑓
𝜏и
(4.30)
т.е. его АЧС |𝑔 𝑓 | является колокольным (Рис. 4.19а, штриховая линия)
при f
0, а фазочастотный спектр – нулевым arg 𝑔𝑥 𝑓
0.
Рис. 4.18. Колокольный радиоимпульс
|𝑔 𝑓 | является
В соответствии с (4.14) и (4.29), АЧХ СФ 𝐾согл 𝑓
также колокольной (рис. 4.19а, сплошная линия), а его фазочастотная
характеристика линейной arg 𝐾согл 𝑓
может
быть
реализован
на
2𝜋𝑓𝑡 . Такой СФ, например,
основе,
многокаскадного
усилителя
промежуточной частоты с резонансными контурами в каскадах.
Спектр колокольного радиоимпульса, прошедшего через этот
фильтр, сужается в √2 раза до величины 1⁄ 𝜏и √2 на уровне 0,46 (Рис.
4.19б):
𝑔вых 𝑓
|𝑔 𝑓 |
exp
𝜋 𝑓
𝑓
𝜏и
exp
𝜋 𝑓
𝑓
𝜏 и √2
а длительность выходного радиоимпульса в √2 раза возрастает.
184
,
|𝑔𝑥 𝑓 |
|𝑔вых 𝑓 |
𝐾согл 𝑓
П
1⁄𝜏и
f0
1⁄ 𝜏и √2
f
f0
а)
f
б)
Рис. 4.19. а) спектр колокольного радиоимпульса (штриховая линия) и
АЧХ СФ (сплошная линия) (а), АЧС сигнала на выходе СФ (б)
∆fИ=1/
4.3.2. Согласованная фильтрация линейно-частнотномодулированного (ЛЧМ) радиоимпульса
ЛЧМ радиоимпульс с прямоугольной огибающей (Рис. 4.20)
описывается выражением
𝑥 𝑡
где 𝑏
cos 2𝜋𝑓 𝑡
0
𝑏𝑡
|𝑡 |
|𝑡 |
,
𝜏и /2,
𝜏и /2,
(4.31)
𝜋Δ𝑓 /𝜏и ,-параметр, Δ𝑓 – девиация частоты (Рис. 4.21).
Если база Б
Δ𝑓 𝜏и ≫ 1, то амплитудно-частотный спектр ЛЧМ
радиоимпульса близок к прямоугольному (Рис. 4.22), а его ширина
примерно равна девиации частоты:Δ𝑓и
∆𝑓 .
ИХ фильтра, согласованного с ЛЧМ сигналом, представляет собой
ЛЧМ колебание, зеркальное сигнальному. Так, если мгновенная частота
колебаний сигнала со временем нарастает (Рис. 4.23, а), то мгновенная
частота ИХ убывает (Рис. 4.23, б).
Поясним физический смысл работы СФ ЛЧМ сигнала. Пусть в
момент времени 𝑡
0 на вход фильтра воздействует 𝛿 - функция (т.е. все
группы близких по частоте спектральных составляющих воздействуют в
один и тот же момент времени). На выходе фильтра различные группы
близких по частоте гармонических составляющих появляются в разные
185
моменты времени. Поэтому данный фильтр оказывается дисперсионным,
так как групповое время задержки зависит от частоты.
x (t )
0
t
и
Рис. 4.20. ЛЧМ радиоимпульс
f (t )
f
t
и
Рис. 4.21. Зависимость мгновенной частоты ЛЧМ радиоимпульса от
времени
G x ( f )
аппроксимация
f
0
f
Рис. 4.22. Амплитудно-частотный спектр комплексной амплитуды ЛЧМ
радиоимпульса
Применительно
к
таким
фильтрам
вводят
в
рассмотрение
дисперсионную характеристику как зависимость задержки огибающей
группы близких по частоте спектральных составляющих (группового
запаздывания) от частоты. Из Рис. 4.23б видно, что меньшая задержка
соответствует группе высоких частот, а большая – группе низких частот.
Тогда зависимость групповой задержки от частоты имеет вид
𝑡гр 𝑓
1 𝑑
arg 𝐾 𝑓
2𝜋 𝑑𝑓
(4.32)
и должна соответствовать графику Рис. 4.24 (сплошная линия). На этом
рисунке штриховой линией показана зависимость f(t) для входного ЛЧМ
радиоимпульса (Рис. 4.23, а).
186
t
t
Рис. 4.23. Импульсная
характеристика
Рис. 4.24. Дисперсионная
характеристика
Использование дисперсионной характеристики позволяет наглядно
пояснить механизм сжатия ЛЧМ радиоимпульса во времени. Таким
образом, СФ (Рис. 4.25) представляет собой дисперсионную линию
задержки (ДЛЗ) и оконечный фильтр, согласованный по полосе.
ДЛ
оконечный
фильтр
Рис. 4.25. Фильтр, согласованный с ЛЧМ радиоимпульсом и сигналы на
входе и выходе СФ
Подадим на его вход прямоугольный импульс, мгновенная частота
которого изменяется от более низкой в начале до более высокой в конце
импульса (Рис. 4.23, а и Рис. 4.24, штриховая линия). Таким образом, в
данном случае группы более низких частот появляються на входе фильтра
раньше, но задерживаются в фильтре в большей степени, а группы более
высоких частот действуют позже, но задерживаются меньше. Это
обеспечивает совмещение колебаний всех групп частот, при наложении
которых образуется более короткий (сжатый) радиоимпульс без
внутриимпульсной модуляции с частотой f0.
При достаточном приближении АЧС к прямоугольному огибающая
сжатого сигнала близка к функции вида sin x/x (Рис. 4.25). Для большей
187
наглядности на рис. 4.26 показаны сигналы на входе а) и выходе б)
согласованного фильтра.
Рис. 4.26. Сигнал на входе (а) и выходе (б) фильтра, согласованного
спрямоугольным ЛЧМ радиоимпульсом
Длительность сжатого импульса определяется только девиацией
частоты входного сигнала и не зависит от его длительности, т.е.
𝜏сж
а коэффициент сжатия
1
Δ𝑓
(4.33)
𝜏сж
𝜏вх /𝜏вых равен базе (Б ) входного
𝜏и
𝜏сж
𝜏и Δ𝑓
радиоимпульса:
𝐾сж
𝜏вх
𝜏вых
Б
(4.34)
Подбор оптимальной дисперсионной характеристики фильтра
сжатия в силу (4.31) эквивалентенподбору оптимальной ФЧХ arg 𝐾 𝑓
СФ. Компенсация фазочастотного спектра сигнала является основной
причиной временного сжатия, т.е. приводит к синфазному наложению
гармонических составляющих и образованию пика сжатого радиоимпульса
(см. Рис. 4.6).
Заметим,
что
дисперсионные
фильтры
используют
как
для
обработки, так и для формирования частотно-модулированных сигналов. В
188
последнем случае на вход фильтра воздействуют коротким -импульсом.
В современных РЛС формирование и сжатие сложных сигналов, в том
числе ЛЧМ, осуществляется в цифровом виде, но физика процессов такая
же, как и в аналоговой технике.
4.3.3. Согласованная фильтрация фазоманипулированного
сигнала
В
радиолокации
фазоманипулированные
применяются
импульсные
и
непрерывные
(фазокодоманипулированные)
радиосигналы.
Напомним, что фазоманипулированный сигнал – это совокупность
сомкнутых
парциальных
радиоимпульсов
(дискрет),
имеющих
одинаковую частоту колебаний 𝑓 и длительность 𝜏 , начальная фаза
которых изменяется по определенному закону.
Рассмотрим вначале согласованную фильтрацию радиоимпульса,
манипулированного по фазе семиэлементным (n = 7) кодом Баркера (Рис.
4.27).
x(t)
τи
t
0
τ0
Рис. 4.27. Радиоимпульс, манипулированный по фазе семиэлементным
кодом Баркера
Для
такого
радиоимпульса
код
описывается
цифровой
последовательностью 0, 0, 0, 1, 1, 0, 1 (+ + + – – + –) так, что начальные
фазы парциальных импульсов равны:𝜑
𝜑
𝜑
𝜑
𝜑
0, 𝜑
𝜑
𝜋.
АЧС
такого фазокодоманипулированного (ФКМ) радиоимпульса
показан на Рис. 4.28.
189
Рис. 4.28. Амплитудно-частотный спектр радиоимпульса,
манипулированного по фазе семиэлементным кодом Баркера
На
Рис.
4.29
представлены
условные
изображения
ФКМ
радиосигнала (а) и ИХ согласованного с ним фильтра (б). Фильтр с такой
ИХ может быть построен на базе линии задержки (ЛЗ) с отводами и общим
сумматором, причем часть отводов подключается к сумматору через
инверсные каскады (Рис. 4.29в). Выходное напряжение сумматора
подается на фильтр, согласованный с одиночным импульсом (СФОИ)
длительностью 𝜏
𝜏и /𝑛.
w c(t)
(n – 1)τ0
‐1
1
τи
τи
‐1
2
3
‐1
4 5 6
∑
7
СФОИ
τ0
w(t)
а)
б)
в)
Рис. 4.29. Код ФМ радиоимпульса (а), ИХ СФ (б), структура СФ (в)
При воздействии на фильтр Рис. 4.29в -функции с выхода сумматора
снимается последовательность манипулированных по знаку -функций,
каждая из которых возбуждает в СФОИ парциальный радиоимпульс с
требуемой начальной фазой. Отметим, что СФОИ может быть установлен
не только на выходе сумматора, но и на входе многоотводной ЛЗ.
190
Процесс согласованной фильтрации ФКМ радиоимпульса поясняет
Рис. 4.30.
Рис. 4.30. Процесс фильтрации ФМ радиоимпульса семиэлементным
кодом Баркера
Задержанные во времени и прошедшие через инверсные каскады в
первом, третьем и четвертом отводах ЛЗ ФКМ радиоимпульсы поступают
на выходной сумматор (см. Рис. 4.29 в). Результат когерентного
суммирования представлен на Рис. 4.30б. Выходное напряжение фильтра
после СФОИ показано на Рис. 4.30в. Длительность главного пика
выходного сигнала (отсчитанная на уровне 0,5) равна длительности
парциального импульса 0. Это означает, что в результате согласованной
фильтрации произошло сжатие во времени входного радиоимпульса
длительностью 𝜏и
𝑛𝜏
в базу Б= n раз, т.е. коэффициент сжатия равен
𝐾сж
где n
Б
𝜏и ⁄𝜏
𝑛
(4.35)
чило дискрет в ФКМ сигнала.
Наряду с главным пиком на выходе имеются остатки сжатия,
относительный уровень которых равен 1/Б и равномерен по всей
временной
оси.
Последнее
свойственно
только
радиоимпульсам,
фазоманипулированным кодом Баркера. Заметим, что до настоящего
времени известные коды Баркера с отмеченными положительными
191
свойствами не превышают 13 разрядов. Поэтому, если требуетсябольшая,
чем 𝜏и
13𝜏
длительность сигнала, то кодирование, как правило,
осуществляется по закону М – последовательности. Она представляет
собой линейную рекуррентную цифровую последовательность, состоящую
из p - ричных цифр 𝑞 . Такая кодовая последовательность рекуррентно (𝑗
𝑚
1, 𝑚
2) может задаваться линейным сравнением 𝑞 по модулю
𝑞
𝑘 𝑞
𝑘 𝑞
⋯
𝑘 𝑞
𝑚𝑜𝑑𝑝 ,
где k1, k2, …, km – постоянные коэффициенты, равные 0 или 1.
Последовательность 𝑞
может иметь больший или меньший
цифровой период (цикл). Распространенность М-последовательностей
определяется тем, что из всех возможных (ненулевых) комбинаций их
период
максимален.
Рассмотренные
закономерности
фильтровой
обработки ФКМ радиоимпульса сохраняются и для таких радиосигналов.
При
модуляции
последовательности
фазы
радиоимпульса
уровень
одним
остатков
сжатого
периодом
М
–
радиоимпульса
неравномерен и в среднем равен 1/√Б, что, естественно, хуже, чем у кодов
Баркера.
При манипуляции фазы непрерывного гармонического колебания
периодической М – последовательностью получаем непрерывный ФКМ
сигнал с периодическим законом изменения фазы. В этом случае
фильтровая обработка сводится к внутрипериодному и межпериодному
суммированию
(накоплению)
принимаемых
колебаний.
Фильтровое
внутрипериодное накопление для периодической последовательности…+
− + + + − +… поясняет Рис. 4.31а, где также показаны эпюры в трех точках
схемы. Дальнейшая межпериодная обработка может быть осуществлена с
помощью гребенчатого фильтра накопления (ГФН), представляющего
собой согласованый фильтр на пачку радиоимпульсов, независимо от
закона их внутриимпульсной модуляции( см. п.4.3.4). При этом форма
192
огибающей выходного напряжения практически не изменяется, а уровень
боковых лепестков остается равным
относительно основного пика.
√
СИГНАЛ
ИХ
+ + – + + – +
+ – + – – – +
–1
–1
–1
–1
1
2
СФОИ
3
–
–
–
+
+
–
+
1
+
+
+
+
+
+
+
+
–
–
–
+
+
–
–
–
+
+
–
+
–
–
+
+
–
+
–
–
–
+
–
–
–
+
+
+
+
–
+
–
–
–
–
–
–
+
+
–
+
+
+
+
+
+
+
+
+
–
–
–
+
+
–
–
–
+
+
–
+
–
–
+
+
–
+
–
–
–
+
–
–
–
+
+
+
+
–
+
–
–
–
–
–
–
+
+
–
+
+
+
+
+
+
+
+
+
–
–
–
+
+
–
–
–
+
+
–
+
–
+
+
+
+
+
+
+
+
+
– + – – – – – – + – – – – – – + – –
+
+
+
+
+
+
+
+
+
2
1
√𝑛
3
0
+
+
+
Рис. 4.31. Внутрипериодное накопление непрерывного ФКМ
радиосигнала (М – последовательность 0, π)
При использовании непрерывного когерентного ФКМ сигнала
уровень остатков на выходе СФ можно снизить, в принципе, до нуля. Для
этого необходимо непрерывный сигнал манипулировать по фазе в
соответствии с М – последовательностью не на 0, π, а на 0, φ, где φ –
отличающееся от π значение фазы. Последнее выбирается в соответствии
с формулой
193
𝜑
𝜋
𝑎𝑟𝑐𝑐𝑜𝑠
𝑛
𝑛
1
1
Например: для n = 7, 15, 31, значения φ соответственно равны 139 ,
151 , 160 . Для n = 7 обработку иллюстрирует Рис. 4.32. В отводах линии
задержки
согласованного
фильтра
установлены
фазовращатели,
расположение которых и создаваемый ими сдвиг фаз соответствуют
выражению для комплексной амплитуды с ИХ (4.9).
На векторной диаграмме поясняется принцип взаимной компенсации
напряжений, снимаемых с отводов линии задержки в интервале между
пиками. Из общего числа n = 7 слагаемых (n – 1) / 2 = 3 имеют нулевую
фазу, а остальные (n + 1) / 2 = 4 – ненулевую, в том числе половина из них
фазу + φ, а другая половина фазу – φ. Нулевой уровень остатков
теоретически может быть получен, если
exp 𝑗0
В
заключении
exp 𝑗𝜑
заметим,
exp
что
𝑗𝜑
0, ( при n=7φ = 139 ).
внедрение
ФКМ
сигналов
с
произвольным значением φ стало возможным в последние годы в связи с
развитием цифровой техники.
194
ИХ
... 0 -φ 0 -φ -φ -φ 0 ...
СИГНАЛ
... 0 φ φ φ 0 φ 0 ...
(n - 1)τ0
-φ
-φ
-φ
-φ
1
∑
2
СФПИ
3
φ 0
-φ 0
φ 0
0 0
0 0
-φ 0
0 0
1
φ φ 0
0
-φ
0 0 0
φ
0 φ φ
-φ
-φ -φ 0
0
0 -φ -φ
0 0 -φ 0 -φ
φ φ φ 0 φ
φ 0 0 φ
-φ 0 -φ -φ
φ 0 φ 0
0 0 -φ 0
0 0 0 -φ
-φ 0 0 0
0 0 φ φ
3ej0 = 3
φ φ 0
0 0 0
0 φ φ
-φ -φ 0
0 -φ -φ
-φ 0 -φ
φ 0 φ
0
0
0
0
0
0
0
0
0
0
0
0
0
0
2
3
φ
-φ
0
0
-φ
w(t)
φ
-φ
φ
0
0
-φ
0
0
0
0
0
0
0 0
0
-φ
φ
-φ
φ
-φ
0
0
-φ
2ejφ
2e-jφ
0
0 0
φ φ
0
0
0
0
0
0
0
0
-4cos(π – φ) = -3
t
t
Рис. 4.32. Внутрипериодное накопление непрерывного ФКМ
радиосигнала (М – последовательность 0, π)
4.3.4. Согласованная фильтрация когерентной пачки
радиоимпульсов
Для когерентной пачки из
M
радиоимпульсов комплексную
амплитуду ожидаемого сигнала представим в виде
𝑋 𝑡
𝑎𝑋 𝑡 ,
195
(4.36)
где
𝑋 𝑡
– комплексная амплитуда одиночного импульса пачки с
Э 𝑖
Э
энергией
1,2 … 𝑀 ,
𝑎
1 –
неслучайный
амплитудный
множитель, учитывающий изменение амплитуды i-го импульса пачки за
счет ее модуляции (например, диаграммой направленности антенны).
В этом случае модуль комплексного корреляционного интеграла
определяется следующим образом:
𝑎
2
𝑍
𝑌 𝑡 𝑋 𝑡 𝑑𝑡
𝑎𝑍 ,
(4.37)
𝑌 𝑡 𝑋 𝑡 𝑑𝑡 – комплексный корреляционный интеграл,
где 𝑍
полученный для i- й составляющей пачки.
Заметим, что для пачки с прямоугольной огибающей 𝑎
𝑎
1 и,
следовательно, имеем
𝑍
𝑍
(4.38)
В соответствии с (4.35) и (4.37) рассмотрим реализацию фильтра,
согласованного с когерентной пачкой радиоимпульсов.
Когерентные
пачки
могут
быть
образованы
любыми
из
рассмотренных в 4.3.1 одиночных радиоимпульсов. Вначале рассмотрим
согласованную
фильтрацию
прямоугольной
пачки
прямоугольных
радиоимпульсов без внутриимпульсной модуляции. АЧС такого сигнала
показан на Рис. 4.33 а.
ИХ СФ представляет собой пачку радиоимпульсов (Рис. 4.33 б). Ее
можно
получить
последовательным
соединением
СФ
одиночного
радиоимпульса и гребенчатого фильтра накопления (ГФН), включающего
многоотводную линию задержки и сумматор (Рис. 4.34, а). При
воздействии на вход δ-функции на выходе СФОИ с определенной
задержкой
образуется
отклик,
соответствующий
ИХ
одиночного
радиоимпульса. Образование требуемой пачки радиоимпульсов на выходе
196
сумматора
обеспечивается
выбором
расположения
отводов
линии
задержки, их числа и коэффициентов передачи (в рассматриваемом
примере все они равны единице).
При наличии модуляции пачки (см. (4.36)) i-й коэффициент передачи
i ∈ 1 … M ) равен 𝑎
.
а)
б)
Рис. 4.33. Амплитудно-частотный спектр когерентной пачки
радиоимпульсов (а), Ожидаемый сигнал x(t) и ИХ согл (t) СФ (б)
Рис. 4.34. Согласованный фильтр (а) и процесс фильтрации когерентной
197
пачки радиоимпульсов (б)
На Рис. 4.35 приведены АЧХ СФОИ K1(f) (Рис. 4.35, а), ГФН K2(f)
(Рис. 4.35, б) и СФ 𝐾 𝑓
4.35, в)
соответствует
𝐾 𝑓 𝐾 𝑓 (Рис. 4.35, в). Последняя АЧХ (Рис.
амплитудно-частотному
сигнала (Рис. 4.33). Поскольку 𝐾 𝑓 𝐾 𝑓
спектру
ожидаемого
𝐾 𝑓 𝐾 𝑓 , то СФОИ и ГФН
можно произвольно менять местами.
Рис. 4.35. Амплитудно-частотные характеристики СФОИ (а), ГФН (б) и
согласованного фильтра (в)
Процесс
фильтрации
когерентной
пачки
радиоимпульсов
иллюстрируется Рис. 4.34 б. В согласованном фильтре осуществляется как
когерентное накопление энергии импульса (внутрипериодное накопление)
в СФОИ, так и когерентное междупериодное накопление в ГФН. При
междупериодном накоплении с отводов линии задержки снимаются
сдвинутые во времени пачки ромбовидных радиоимпульсов. При точной
установке отводов импульсы сигнала накладываются в фазе, что приводит
к образованию ромбовидной пачки из 2M – 1 радиоимпульсов. Сложение в
фазе, особенно существенное на вершине ромба, позволяет повысить
отношение
сигнал/шум,
поскольку
некоррелированные
шумовые
колебания складываются с произвольными фазами. Энергетическое ОСШ
на выходе СФ равно
198
1
𝑁
𝑞
Согласно
2Э
𝑁
𝑋 𝑡 𝑋 ∗ 𝑡 𝑑𝑡
(4.38)
ОСШ
2𝑀Э
𝑁
определяется
𝑀𝑞
отношением
(4.39)
удвоенной
суммарной энергией всех импульсов пачки 2MЭ0 к спектральной плотности
мощности шума N0. Это отношение в M раз больше, чем отношение
сигнал/шум 𝑞
2Э /𝑁 на выходе СФОИ. В формуле (4.38) учтено, что
при i ≠ j выполняется условие
𝑋 𝑡 𝑋
∗
𝑡 𝑑𝑡
0,
поскольку i-й и j-й импульсы пачки во времени не перекрываются. Это
связано с тем, что в импульсных РЛС, как правило Т и.
Положительный эффект от частотной фильтрации связан с тем, что
гребенчатая структура фильтра (см. Рис. 4.34 а и Рис. 4.34 б) позволяет
подавить шум вне спектра сигнала (выделить сигнал при постоянном
уровне шума). При этом положения гребней АЧХ фильтра на частотной
оси совпадает с положением гребней АЧС сигнала.
Благодаря
этому,
когерентное
междупериодное
накопление
приводит к увеличению ОСШ по мощности в M раз. Очевидно, что в связи
с этим, каждый отдельный импульс может иметь энергию в М раз (на 10
lg M , дБ)
меньшую по сравнению энергией всей пачки при тех же
значениях ВПО и ВЛТ D, F (см. п.4.5.2).
Заметим, что при реализации фильтровой обработки необходимо
учитывать изменения периода повторения импульсов отраженного
пачечного сигнала, возникающие за счет движения цели. Это приводит к
многоканальному построению фильтра, например, на базе нониусных ЛЗ
(рис. 4.36).
199
Рис. 4.36. Нониусные линии задержки
Трудность
технической
реализации
рассмотренного
выше
согласованного фильтра в аналоговом виде связана с необходимостью
обеспечения в многоотводной линии большой временной задержки с
малым затуханием сигнала, а также высокой точности и стабильностью
задержки между отводами для когерентного сложения импульсов пачки. В
этой связи накопление пачечного сигнала можно производить также с
помощью рециркулятора (Рис. 4.37) с коэффициентом обратной связи β.
При этом, однако могут возникнуть потери, обусловленные отличием ИХ
рециркулятора от требуемой. При цифровой обработке указанные выше
трудности в основном устраняются.
В заключение отметим, что для получения модуля комплексного
корреляционного интеграла на выходе рассмотренного СФ (Рис. 4.34, а)
необходимо установить амплитудный детектор, как показано на Рис. 4.38.
x(t)
x(t)
Z
Рис. 4.38. Устройство
согласованной фильтрованной
обработки когерентной пачки
радиоимпульсов
Рис. 4.37. Устройство обработки с
рецилкулятором
200
4.4.
Функции рассогласования (неопределённости). Основные
определения
Задачу обнаружения целей можно рассматривать как первый этап их
радиолокационного наблюдения. На этом этапе важнейшим параметром
сигнала является его энергия. При этом закон внутриимпульсной
модуляции оказывается незначащим фактором, поскольку в момент 𝑡
возникновения его пика на выходе коррелятора или СФ, он полностью
скомпенсирован согласованной обработкой.
Если цель обнаружена, то на последующих этапах наблюдения
решаются задачи разрешения и измерения частотно-временных и
пространственных координат целей, для которых структура сигнала и
параметры антенны являются определяющими. Это связано с тем, что
показатели качества решения указанных задач (см. раздел 6) зависят от
относительной реакции устройств согласованной обработки на смещение
информационных
параметров
сигнала
относительно
вектора
их
ожидаемых значений 0{R0,V0,0,0}, в данном случае 4хкомпонентного.
Функция 𝜒 𝛥𝑅, 𝛥𝑉 , 𝛥𝜃, 𝛥𝜑 , зависящая от этих сдвигов, определяется как
функция рассогласования (ФР). Поскольку рассогласования по дальности
∆R и скорости ∆Vr однозначно связаны с временной задержкой ∆ и
доплеровским
сдвигом
частоты
∆𝐹д
соотношениями:
∆R=c∆2
и
∆Vr=∆𝐹Д /2, то ФР часто записывают в виде 𝜒 𝛥𝜏, 𝛥𝐹Д , 𝛥𝜃, 𝛥𝜑
Физический смысл ФР поясняет рис. 4.39. Пусть цель 1 имеет набор
параметров, на которые «настроена» РЛС, а параметры цели 2 смещены
относительно ожидаемых. Тогда ФР фактически показывает реакцию РЛС
на сигнал, отраженный от Ц2, если ее система обработки «настроена» на
эхо-сигнал от Ц1. Причем рассогласование по четырем параметрам может
быть в любой комбинации.
201
𝑍
Ц1 (R0, V0, θ0, φ0)
Ц2 (R0 + ΔR, V0 + ΔVr, θ0 + Δθ, φ0 + Δφ)
Δθ
𝜃0
𝜑0
Плоскость
антенны
РЛС
𝑋
Δφ
𝑌
Рис. 4.39. Пояснение физического смысла функции рассогласования.
В литературе ФР часто также называют АКФ сигнала по причине,
которая следует из её математического описания в виде:
𝑥 ∗ 𝑡, 𝜶 ⋅ 𝑥 𝑡, 𝜶
𝜌 𝜶, 𝜶𝟎
Данное
выражение
показывает,
d𝑡= 𝜒 𝜶, 𝜶𝟎
что
ФР
(4.40)
определяется
через
корреляцию между принятым сигналом с информационным вектором
параметров 𝜶 и таким же сигналом, сформированным в устройстве
обработки с вектором ожидаемых параметров 𝜶𝟎 . Согласно (4.39)
максимального значения функция 𝜒 𝜶, 𝜶𝟎 достигается при 𝜶
𝜶𝟎 , так как
в этом случае кореляция между сигналами единичная 𝜌 𝜶, 𝜶𝟎
1. Обычно
полагают, что 𝜶𝟎 – вектор с нулевыми координатами, и тогда вектор
𝜶
‖∆𝑅, ∆𝑉 , ∆𝜃, Δ𝜑‖, имеет смысл рассогласования координат.
Для изображения ФР (АКФ) в общем случае потребуется пятимерное
пространство.В трёхмерном пространстве можно изобразить только её
сечения, если зафиксировать любые два параметра рассогласования.
Однако
в
большинстве
практических
случаев
применения
узкополосных высокочастотных сигналов, когда 𝛥𝑓и ≪ 𝑓
существенно упрощается.
202
ситуация
Если антенна РЛС не обладает дисперсионными (частотными)
свойствами, то частотно-временные и пространственные параметры можно
рассматривать раздельно, а пятимерную ФР факторизовать на две
трехмерные.
𝜒 𝛥𝑅, 𝛥𝑉 , 𝛥𝜃, 𝛥𝜑
𝜒 (Δτ,Δ𝐹Д )𝜒 𝛥𝜃, 𝛥𝜑 ,
(4.41)
где 𝜒 (Δτ,Δ𝐹д ) – частотно-временная функция Вудворта в координатах
«задержка÷ частота Доплера», 𝜒 𝛥𝜃, 𝛥𝜑 – ДН в сферической системе
координат, связанной с плоскостью решётки (Рис. 4.39).
Напомним, что само понятие ДН имеет смысл только при
монохроматическом возбуждении антенны. Поэтому при использовании
широкополосных сигналов или антенны с очень большой апертурой
необходимо определить условия корректности факторизации (4.40).
Рассмотрим важный для практики случай, когда в качестве антенной
системы РЛС используется линейная ФАР, луч которой сканирует на
угол𝜃 за счет работы дискретных фазовращателей со сбросом фазы через
2𝜋. В такой решетке возникает эффект угло-частотной чувствительности
луча, связанный с ее дисперсионными свойствами.
В Приложении 6 показано, что в этой ситуации разделение обработки
на частотно-временную и пространственную возможно, если выполняется
любой из двух эквивалентных критериев.
𝑇 ≪ 𝜏И или
где 𝑇
%
,
град
≪ 1,
(4.42)
𝐿 𝑠𝑖𝑛𝜃 /𝑐 – время заполнения апертуры длиной La с направления
𝜃 ;
𝜏И
𝜇%
1⁄Δ𝑓И – длительность сигнала (для сложного – после сжатия);
100
∆
И
– относительная ширина полосы сигнала.
Δ𝜃 , (град) – ширина неотклоненного луча ФАР по уровню половинной
мощности.
203
Для несканирующих антенн (зеркальных, рупорных, линзовых и т.д.)
условия (4.41) выполняются автоматически, так как их луч практически
0.
всегда ориентирован по нормали, т.е. 𝜃
При дальнейшем рассмотрении, термин «функция рассогласования»
будем относить к частотно-временной функции Вудворта, но в её
обозначении будет опущен индекс «w». Для пространственной ФР будем
использовать
традиционный
термин
«диаграмма
направленности»,
которую будем обозначать 𝐹 𝛥𝜃, 𝛥𝜑 .
Итак привычные понятия и определения ДН и ФР имеют физический
смысл только при разделении пространственной и частотно-временной
обработок. Они описывают выходные отклики ФАР при отклонении
координат цели на 𝛥𝜃 и 𝛥𝜑 от направления фазирования
согласованного фильтра (коррелятора) в момент времени 𝑡
𝜃 ,𝜑
и
𝛥𝜏 при
рассогласовании по частоте Доплера на 𝛥𝐹д относительно 𝑓 . (В
дальнейщем основное внимание будет уделено функции Вудворта,
поскольку свойства и характеристики ДН подробно изучаются в курсе
«Антенны»).
Для получения функции Вудворта 𝜒 𝛥𝜏, 𝛥𝐹д
сигнал со сдвигом
2х-информационных параметров на входе СФ (коррелятора) можно
представить во временной или частотной областях:
𝑥 𝑡, 𝜶
𝑔 𝑓, 𝜶
𝑋 𝑡
𝐺 𝑓
𝛥𝜏 𝑒𝑥𝑝 𝑗2𝜋 𝑓
𝛥𝐹д 𝑡
𝛥𝐹д exp 𝑗2𝜋𝑓 𝑡
𝛥𝜏
(4.42а)
(4.42б)
Здесь комплексная амплитуда 𝛸(t) и ее спектр 𝐺 (f) как обычно
связаны парой преобразований Фурье.
В радиолокации, как правило, не требуется извлекать информацию
из фазы отраженного сигнала, которая имеет случайный характер. Поэтому
на выходе СФ включают амплитудный детектор (см.рис.4.8). Он выделяет
огибающую этого сигнала, устраняя высокочастотое заполнение.
204
Тогда для вычисления ФР следует воспользоваться модулем
комплексной огибающей сигнала без учёта множителя exp 𝑗2𝜋𝑓 𝑡 . После
нормировки к энергии сигнала с учётом (4.37) ФР можно представить в
двух эквивалентных формах:
𝛸 𝑡 ⋅ 𝛸∗ 𝑡
𝜒 𝛥𝜏, 𝛥𝐹
𝛥𝜏 e
д
d𝑡
|𝛸 𝑡 | d𝑡
𝐺 𝑓 ⋅𝐺
𝜒 𝛥𝜏, 𝛥𝐹
∗
𝑓
𝛥𝐹д e
d𝑓
|𝐺 𝑓 | d𝑓
(4.43а)
(4.43б)
Аналогично можно записать выражения для ДН плоской антенны
размеры Lx x Ly в двух ортогональных плоскостях 𝜑
0и𝜑
90° (см. Рис.
4.39), если их амлитудные распределения вдоль осей x и у разделяются на
A(x) и A(y)
𝐹 𝛥𝜃, 𝜑
𝐹 𝛥𝜃, 𝜑
0
90°
|
∆
|
(4.44а)
,
|
|
∆
.
(4.44б)
Здесь 𝛥𝜃 означает рассогласование угла относительно ожидаемого
направления луча .
В литературе запись ФР в форме (4.43) получила название «функция
неопределённости» (ФН). За счёт нормировки энергии эта форма удобна
для анализа ФР различных сигналов, которые можно сравнивать только в
случае, когда они они имеют одинаковую энергию. Аналогично выражения
п.4.44 показывают, что сравниваемые антенны должны иметь одинаковую
площадь апертуры. Отметим, что часто встречающиеся в литературе
термины «функция рассогласования» и «автокорреляционная функция»
сигналов эквивалентны. Идентичными также являются и нормированные
функции,
называемые
в
учебниках
«функция
неопределённости»и
«функция Вудворта». Поскольку по сути все эти функции имеют один и
тот же смысл, в дальнейшем, для функции Вудворта будем пользоваться
205
термином:
«Функция
неопределённости»
(«ФН»).
При
этом
пространственную ФН, как было принято ранее, будем называть
«диаграмма направленности», полагая что она нормирована. Отметим,
что постоянные коэффициенты 1/2 в формулах 4.43 в дальнейшем будут
опущены.
Термин «функция неопределённости» в радиолокации заимствовано из квантовой физики, где
согласно «Принципу неопределённости» Гейзенберга, «нельзя одновременно определить скорость и
координаты элементарной частицы». В радиолокации, как будет показано в дальнейшем, понятие
неопределённость связана с тем, что наблюдая выходной сигнал СФ для функции Вудворта нельзя дать
однозначный ответ, по какому параметру 𝜏 или 𝐹д на входе произошло рассогласование.Аналогично
для трехмерной ДН антенны снижение уровня сигнала может зависеть от смещения цели как по
азимуту, так и по углу места относительно ожидаемого направления.
4.5.
Свойства и характеристики частотно-временной функции
неопределённости.
Свойства ФН будем рассматривать на основе их описания в виде 4.43.
1. Нормировка к единичной энергии.
Для того, чтобы при нулевых рассогласованиях по координатам
(∆=0, ∆𝐹д =0), максимум ФН равнялся единице (𝜒 0, 0
1) следует
потребовать:
𝑋 𝑡
𝐺 𝑓
d𝑡
d𝑓
1
(4.46)
Соотношение (4.45) соответствует сигналу с единичной энергией, и
поэтому, если это условие выполняется, знаменателями в (4.43) можно
пренебречь.
2. Центральная симметрия
Заменяя в (4.43) 𝛥𝜏 на "– 𝛥𝜏", а 𝛥𝐹д на "– 𝛥𝐹д " можно убедиться в
равенстве:
𝜒 𝛥𝜏, 𝛥𝐹д
𝜒
𝛥𝜏, 𝛥𝐹д
(4.47)
Равенство (4.46) указывает на инвариантность ФН к знаку
рассогласования, что характерно для любого фильтра, имеющего
206
симметричную характеристику относительно параметра его настройки
𝛼 .
3. Единичность объёма
В силу этого свойства ФН и получила своё название. Обычно именно
его трактуют как принцип неопределённости в теории радиолокационных
сигналов, при котором невозможно расширить/сузить ФН по одной
координате без пропорционального сужения/расширения по другой.
Формальная запись этого свойства соответствует вычислению объёма
тела,ограниченного ФН и имеет вид:
𝑉
𝜒 𝛥𝜏, 𝛥𝐹д 𝑑𝛥𝜏𝑑𝛥𝐹д
1
(4.48)
Используя (4.43) и правила интегрирования, докажем равенство
(4.47) для произвольного сигнала с единичной энергией (Э=1)
𝛸 𝑡 ⋅ 𝛸∗ 𝑡
𝜒 𝛥𝜏, 𝛥𝐹д 𝑑𝛥𝜏𝑑𝛥𝐹д
𝛸 𝑢 𝛸∗ 𝑢
𝛥𝜏 𝛸 ∗ 𝑣 𝛸 𝑣
𝛸 𝑢 𝛸∗ 𝑢
𝑋 𝑡
⋅ 𝑋 𝑡
𝛥𝜏 e
𝛥𝜏 𝛸 ∗ 𝑣 𝛸 𝑣
𝛸 𝑡 𝛸∗ 𝑡
𝛥𝜏
д
𝛥𝜏 𝛿 𝑢
𝛥𝜏 𝛸 ∗ 𝑡 𝑋 𝑡
d𝑡
𝛥𝜏 e
𝑋 𝑡
д
d𝑡 𝑑𝛥𝜏𝑑𝛥𝐹д
𝑑𝑢𝑑𝑣𝑑𝛥𝜏𝑑𝛥𝐹д
𝑣 𝑑𝑢𝑑𝑣𝑑𝛥𝜏𝑑𝛥𝐹д
𝛥𝜏 𝑑𝑡𝑑𝛥𝜏
𝑑𝑡
𝑋 𝑡
∆
𝑑𝑡
1
Данный результат получен в соответствии с определением -функции
в виде
𝑒
д
𝑑𝛥𝐹д
𝛿 𝑢
𝑣 , а также с учётом того, что энергия
сигнала не зависит от его временного сдвига на 𝛥𝜏.
4. Главное сечение ФН вдоль оси временной задержки.
207
Для того, чтобы получить структуру сечения 𝜒 𝛥𝜏, 0
в (4.43б)
0, и тогда выражение для ФН примет вид:
следует положить 𝛥𝐹д
𝜒 𝛥𝜏, 0
𝐺 𝑓 e
d𝑓
(4.49)
Соотношение (4.48) показывает, что вертикальное сечение тела ФН
плоскостью
нулевого
частотного
рассогласования
можно
охарактеризовать модулем Фурье преобразования от квадрата АЧС
сигнала. Главное сечение ФН 𝜒 𝛥𝜏, 0
можно рассматривать как
огибающую сигнала на выходе СФ при отсутствии рассогласования по
частоте Доплера.
Заметим, что если на вход СФ поступает сигнал, рассогласованный
по доплеровской частоте на 𝛥𝐹д , то его огибающая на выходе СФ
𝑐𝑜𝑛𝑠𝑡 и
соответствует вертикальному сечению ФН плоскостью 𝛥𝐹д
рассматривается как косое сечение.
5. Главное сечение ФН вдоль оси частот Доплера.
Для того, чтобы получить структуру сечения 𝜒 0, 𝛥𝐹д
следует положить 𝛥𝜏
в (4.43б)
0, и тогда выражение для ФН примет вид:
𝜒 0, 𝛥𝐹д
𝑋 𝑡
e
д
d𝑡
(4.50)
Соотношение (4.49) показывает, что вертикальное сечение тела ФН
плоскостью
нулевого
временного
рассогласования
можно
охарактеризовать модулем Фурье преобразования от квадрата огибающей
амплитуд сигналов. Главное сечение ФН 𝜒 0, 𝛥𝐹д можно рассматривать
как АЧС выходного сигнала СФ при 𝛥𝜏
0, т.е. в момент времени 𝑡 ,
соответствующий появлению максимума сигнала.
6. Мера разрешающей способности по дальности.
208
Как следует из (4.48), при ограниченной ширине спектра сигнала,
равной 𝛥𝑓и сечение 𝜒 𝛥𝜏, 0 имеет вид импульса шириной 𝛿𝜏
1 𝛥𝑓и (Рис.
4.40 а). Значение 𝛿𝜏 принимают за меру разрешающей способности по
времени запаздывания.Выбор этой меры означает, что два сигнала
разрешаются
(в
рэлеевском
смысле),
если
разность
времени
их
запаздывания превышает 𝛿𝜏 при одинаковой доплеровской частоте этих
сигналов (скорости целей).
Таким образом, мера разрешающая способность РЛС по дальности
𝛿𝑅
с𝛿𝜏⁄2
с/2𝛥𝑓И зависит только от ширины спектра сигнала и не
зависит от его длительности (у простых сигналов 𝛥𝑓И
1 𝜏И , но это
частный случай).
7. Мера разрешающей способности по скорости.
Как следует из (4.49), при длительности сигнала 𝜏И сечение 𝜒 0, 𝛥𝐹д
имеет вид импульса шириной 𝛿𝐹д
1 𝛥𝜏И (Рис. 4.40 б). Значение 𝛿𝐹
принимают за меру разрешающей способности по частоте Доплера.
Выбор этой меры означает, что два сигнала разрешаются (в рэлеевском
смысле), если разность их доплеровских частот превышает 𝛿𝐹д , при
одинаковом времени запаздывания (дальности до целей).
Таким образом, такая мера разрешающая способность РЛС по
радиальной
скорости
𝛿𝑉
𝜆𝛿𝐹д ⁄2
𝜆/2𝜏И
зависит
длительности сигнала и не зависит от ширины его спектра.
209
только
от
χ 0, ∆𝐹д
χ Δ𝜏, 0
∆𝜏
1/∆𝑓и
𝜏
∆𝐹д
а)
1/𝜏и
𝐹д
б)
Рис. 4.40. Меры разрешения по временной задержке (а) и частоте Доплера
(б)
Перейдем
характеризуют
к
рассмотрению
параметров,
частотно-временные
ФН.
Для
которыми
теории
и
обычно
практики
радиолокации важно определить сечение ФН на уровне 𝜒 𝛥𝜏, 𝛥𝐹д
1/2. В
литературе это сечение называют «диаграммой неопределённости». В
общем случае оно изображается в виде эллипса, как показано на Рис. 4.41.
Эллипс пересекает координатные оси в точках 𝛥𝜏
𝛥𝑓И и 𝛥𝐹д
𝛥𝜏И
и аппроксимируется уравнением:
𝛥𝑓И 𝜏И
где 0
𝑘
𝜏И 𝛥𝐹д
𝑘𝛥𝜏𝛥𝐹д
1
4
(4.51)
1 – постоянный множитель, определяющий угол наклона
главной оси эллипса относительно осей координат.
При k=1 главная ось эллипса наклонена под углом 45°(Рис. 4.41 а), а
при 𝑘
0 оси эллипса совпадают с координатными осями (Рис. 4.41 б). При
этом длины его полуосей соответственно равны 1 𝛥𝑓И и 1 𝛥𝜏И .
210
F
F
1
2𝜏и
1
2∆𝑓и
1
2𝜏и
1
2∆𝑓и
𝜏
1
𝜏и
0
𝜏
1
2∆𝑓и
а)
б)
Рис. 4.41. Диаграммы неопределенности при k = 1 (а) и k = 0 (б)
Поясним
физический
смысл
понятия
«диаграмма
неопределённости». Приведенные на Рис. 4.41 эллипсы показывают при
каком совместном рассогласовании по 𝛥𝜏 и/или 𝛥𝐹д мощность сигнала на
выходе устройства согласованной обработки падает в 2 раза (на 3 дБ).
Внутри контура этого эллипса невозможно определить, за счёт какой
комбинации сдвигов параметров это произошло. В этом и заключается
смысл понятия «неопределённость».
Проанализируем главный пик ФН (см. Рис. 4.42). В общем случае его
удобно аппроксимировать уравнением параболоида вида:
𝜒 𝛥𝜏, 𝛥𝐹д
При 𝜒 𝛥𝜏, 𝛥𝐹д
1
2 𝛥𝑓и 𝛥𝜏
𝜏и 𝛥𝐹д
𝑘𝛥𝜏𝛥𝐹д
(4.52)
1/2 уравнение (4.51) переходит в уравнение (4.50).
211
χ
ΔFд
Δτ
Рис. 4.42. Аппроксимация главного пика ФН.
Оценим протяжённость ФН вдоль осей 𝛥𝜏 и 𝛥𝐹д применительно к
произвольному импульсному сигналу длительностью 𝜏и с шириной
спектра 𝛥𝑓И . Как следует из (4.43 а) интеграл в числителе обращается в
нуль при |Δτ ̇ |
перекрываться.
𝜏И , так как подынтегральные множители перестают
Соответственно,
протяженность
вдоль
Δ𝜏
оси
не
превышает 2𝜏И . Аналогично из (4.43б) следует, что максимальная
протяжённость вдоль оси 𝛥𝐹д не может превышать 2𝛥𝑓И .
Для статистической теории измерений (см. раздел 6) важно
поведение ФН в окрестности ее вершины (пика). Эту окрестность можно
приближенно представить в виде степенного ряда, ограничившись членами
не выше второго порядка.
𝜒 Δ𝜏, Δ𝐹д
𝜒 0,0
Все
где 𝜕𝜒/𝑑Δ𝜏
𝜕𝜒
Δ𝜏
𝜕Δ𝜏
производные
𝜕𝜒/𝜕Δ𝐹д
𝜕𝜒
𝜕Δ𝐹д
в
1 𝜕 𝜒
Δ𝜏
2 𝜕Δ𝜏
4.52
1 𝜕 𝜒
Δ𝐹д
2 𝜕Δ𝐹д
берутся
в
𝜕 𝜒
Δ𝜏Δ𝐹д
𝜕Δ𝜏𝜕Δ𝐹д
точке
Δ𝜏
(4.53)
Δ𝐹д
0,
0, так как в силу свойства 2 (см. 4.46) ФН
симметрична относительно начала координат. Принимая во внимание, что
𝜒 0,0
1, формула (4.52) упрощается и принимает вид:
𝜒(Δτ,Δ𝐹д )
1
Δ𝜏
Δ𝐹д
212
Δ𝜏Δ𝐹д
(4.54)
В общем случае ФН некоторых сигналов на практике могут не иметь
вторых производных в начале координат. В этом случае можно
воспользоваться уравнением аппроксимирующего параболоида (4.51). На
основе этого уравнения для вторых производных в (4.53) имеем
𝜕 𝜒
𝜕Δ𝜏
4Δ𝑓и ;
𝜕 𝜒
4𝜏и ;
𝜕Δ𝐹д
𝜕 𝜒
𝜕Δ𝜏𝜕Δ𝐹д
2𝑘
(4.55)
В (4.54) значение k соответствует множителю в уравнении эллипса
(см. 4.50).
Если
k
≠
0,
то
взаимнокоррелированы
в
это
означает,
что
различной
аргументы
степени.
ФН
Полностью
коррлеированными они оказываются при k=1 , а эллипс неопределенности
имеет
наклон
45
некоррелированы
(см. Рис.
между
4.41
собой
а).
При
(см. Рис.
k=0
эти
аргументы
4.41 б),
т.е.
смешанная
производная в 4.53 оказывается равной нулю.
4.6.
Функции неопределённости радиолокационных сигналов.
4.6.1. Сигнал с «идеальной» ФН.
Поставим задачу найти для РЛС сигнал, позволяющий реализовать
высокую разрешающую способность как по дальности так и по скорости
одновременно . Это означает, что в центре ФН, в окрестности точки
(𝛥𝜏
𝛥𝐹д
0), должен наблюдаться узкий пик (вид такой ФН показан на
рис. 4.43). В силу свойства единичного объёма (4.41), тело под ФН должно
быть равномерно распределено над основанием площадью 2𝛥𝑓И × 2𝜏И под
узким пиком в центре. Пусть толщина этого основания равна 𝛥𝑙осн как
показано на рис. 4.43. Тогда объем части тела ФН, приходящийся на
основание, равен
𝑉осн.
2𝛥𝑓И
2𝜏И
𝛥𝑙осн
213
4𝜏И 𝛥𝑓И 𝛥𝑙осн
(4.56)
𝜒 ∆𝜏, ∆𝐹д
∆𝐹д
2
∆𝑙осн
2∆𝑓и
∆𝜏
2𝜏и
Рис. 4.43. «Идеальная» форма ФН
В свою очередь объём центральной части тела ФН, где формируется
пик, приближённо оценим объёмом параллелепипеда единичной высоты
(свойство нормировки 4.45), и площадью основания пика, связанной с
требуемыми мерами разрешающей способности по координатам 𝛥𝜏 и 𝛥𝐹д
(см. свойства 6 и 7).
𝑉пик
χ 0,0
𝜏И 𝛥𝑓И
1
Б
(4.57)
Для того, чтобы этот объём был пренебрежимо мал: 𝑉пик ≪ 1, т.е. не
нарушалось условие (4.47), необходимо потребовать:
Б
𝜏И 𝛥𝑓И ≫ 1
(4.58)
Это означает, что сигнал должен иметь очень большую базу и в
пределе свести главный пик ФН к δ-функции. Такие ФН имеют вид,
подобный показанному на Рис. 4.43, и их называют «игольчатыми» или
«кнопочными».
Итак, сигнал, обеспечивающий высокое рэлеевское разрешение по
обеим координатам 𝛥𝜏 и 𝛥𝐹д , должен быть «большебазовым», а при
ограниченной длительности – широкополосным. Вместе с тем для
«идеальной» ФН условие высокого разрешения является необходимым, но
недостаточным. Это связано с тем, что у главного пика 𝜒 𝛥𝜏, 𝛥𝐹д
на
плоскости координат имеется «пьедестал». Он «мешает» выделению
214
слабых сигналов на фоне сильных (например, уровень «пьедестала» от
сильного эхо-сигнала может превышать главный пик слабого эхо-сигнала,
если у лоцируемых целей существенно разные ЭПР).
Если считать, что 𝑉
1(см.4.47), то амплитудный уровень
основания ФН составляет:
𝛥𝑙осн
1
(4.59)
2 𝜏И 𝛥𝑓И
Таким образом, чтобы уменьшить высоту𝛥𝑙осн также необходимо
увеличивать базу сигнала Б.
В последние годы сигналы с большой базой находят все большее распространение в
радиолокации. Это объясняется не только соображениями улучшения разрешающей способности по
координатам, но и необходимостью снизить импульсные мощности сигнала. Простые сигналы (Б=1) с
высокой импульсной мощностью предъявляют повышенные требования к электрической прочности
СВЧ трактов и антенн. Кроме того, переход от вауумных СВЧ генераторов и усилите лей к
твердотельным с ограниченной импульсной мощностью требует «удлиннения» сигналов при
сохранении их энергии. Поэтому в современных твердотельных РЛС все чаще применяются слложные
сигналы типа ЛЧМ или ФМ. Заметим, что «идеальная» форма частотно-временной ФН, показанная на
Рис. 4.43, также является «идеальной» ДН антенны. Однако для этого необходимо «растяжение»
апертуры антенны в двух плоскостях одновременно, а также постоянство среднего уровня боковых
лепестков (УБЛ).
4.6.2. ФН одиночного узкополосного радиоимпульса.
Под узкополосным сигналом обычно понимают импульс с единичной
базой (Б = 1). Рассмотрим радиоимпульс с прямоугольной огибающей (рис.
4.44), который описывается действительной функцией:
Х 𝑡
1,
0,
|𝑡|
|𝑡 |
𝜏и /2
𝜏и /2
(4.60)
Этот сигнал имеет спектр вида:
И/
𝐺Х 𝑓
exp
𝑗2𝜋𝑓𝑡 𝑑𝑡
И/
215
sin 𝜋𝑓𝜏И
𝜋𝑓𝜏И
(4.61)
Рис. 4.44 Радиоимпульс с прямоугольной огибающей.
Подставляя эти соотношения в (4.38), для ФН имеем:
sin 𝜋𝛥𝐹д 𝜏И |𝛥𝜏|
𝜋𝛥𝐹д 𝜏И
𝜒 𝛥𝜏, 𝛥𝐹д
|𝑡 |
0,
|𝑡 |
,
𝜏И
(4.62)
𝜏И
Вид такой ФН представлен на рис. 4.45 а, а на рис. 4.45 б и рис.4.45
в - её главные сечения плоскостями 𝛥𝐹д
0 и 𝛥𝜏
0 соответственно.
Аналитически эти сечения определяются соотношениями:
𝜒 𝛥𝜏, 0
1
𝜒 0, 𝛥𝐹д
|𝛥𝜏|
|𝛥𝜏|
,
𝜏И
𝜏И
|𝛥𝜏|
0,
𝜏И
sin 𝜋𝛥𝐹д 𝜏И
𝜋𝛥𝐹д 𝜏И
χ(ΔFд , Δτ)
Δτ
ΔFд
а)
216
(4.62а)
(4.62б)
χ(ΔFд , 0)
χ(Δτ, 0)
1
ΔFд = 0
1
Δτ = 0
τи
0,5
-τи
Δτ
τи
0
-
1
τи
0
1
τи
ΔFд
б)
Рис. 4.45. ФН одиночного радиоимпульса (а), сечения вдоль оси Δτ (б) и
в
д
Соответствующие меры разрешающей
способности определяются
о
протяжённостью этих сечений и равны
л 𝛿𝜏 1/𝛥𝑓И 𝜏И и 𝛿𝐹д 1/𝜏И .
ь
Диаграмма неопределённости (сечение ФН на уровне 0.5)
о вида:
аппроксимируется уравнением эллипса
с
𝜏И 𝛥𝐹д и 1/4,
И
𝛥𝐹д (в) ΔFд = 0
а центральный пик ФН – уравнением параболоида:
𝜒 𝛥𝜏, 𝛥𝐹д
1
2
𝛥𝜏
𝜏И
(4.64)
𝜏И 𝛥𝐹д
(4.65)
Здесь важно отметить, что согласно этим соотношениям кореляция
аргументов ФН отсутствует, что соответствует к = 0 в 4.50. Основная
особенность рассмотренного импульса с Б = 1 связана с невозможностью
одновременно улучшить разрешающую способность по временной
задержке и доплеровской частоте. Сужение ФН по одной оси неизбежно
приводит к её расширению по другой.
4.6.3. ФН когерентной пачки немодулированных
радиоимпульсов.
Пачечные
сигналы
являются
наиболее
распространенными
в
практике радиолокации. М-элементная пачка с постоянным периодом
217
повторения 𝑇, состоящая из одинаковых импульсов длительностью 𝜏и ,
показана на Рис. 4.46. Для простоты анализа примем, что она имеет
прямоугольную огибающую. Протяжённость пачечного сигнала равна
𝑀
1 𝑇
𝑀𝑇, а ширина спектра здесь такая же, как у одиночного
импульса 𝛥𝑓И
1/𝜏И . Очевидно, что этот сигнал имеет большую базу Б,
так как при 𝑀 ≫ 1 имеем:
Б
где 𝑇/𝜏И
𝑀𝑇 ∙ 𝛥𝑓И
𝑀𝜂 ≫ 1,
(4.66)
𝜂 – скважность импульсов.
υ(t)
τи
а)
T
t
υ(t-τ)
б)
τ
t
Рис. 4.46. Пачечный сигнал
Очевидно, что подстановка пачечного сигнала в 4.43а приводит к
периодической структуре ФН, которая обращается в нуль при 𝑇
|𝛥𝜏|
𝑚
1 𝑇
𝜏И
𝜏И (m = ± 0, ± 1, ± 2, …, ±(M - 1)). Протяжённость ФН
вдоль оси временной задержки определяется очевидным условием: |𝛥𝜏|
𝑚𝑇. Например, при M = 5 и 𝜏и
0.3𝑇 примерный вид ФН пачки
радиоимпульсов в трёхмерном изображении показан на Рис. 4.47. Главные
сечения этой ФН плоскостями 𝛥𝐹д
0 и 𝛥𝜏
0 иллюстрируют Рис. 4.48 а)
и Рис. 4.48 б) соответственно. Диаграмма неопределённости пачечного
сигнала изображена на Рис. 4.49. Из приведенных рисунков видно, что ФН
имеет многопиковую структуру. При 𝜏И ≪ 𝑇 (η >> 1) центральный пик ФН
приближённо можно аппроксимировать функцией:
218
sin 𝜋𝛥𝐹д 𝑀Т 1
𝜒 𝛥𝜏, 𝛥𝐹д
|
|
И
(4.67)
𝜋𝛥𝐹д 𝑀Т
Для функции (4.66) меры разрешающей способности по 𝛥𝐹д и 𝛥𝜏
равны 𝛿𝜏
𝜏И и 𝛿𝐹д
1/𝑀Т соответственно. χ(Δτ,ΔFд )
Рис. 4.47. Трехмерная ФН пачки импульсов.
χ
1
Fд = 0
а)
τи
τ
‐4T
‐3T
‐2T
‐T
0
1
T
2T
3T
4T
χ
1
𝑀𝑇
б)
2
𝜏и
1
𝑇
Рис. 4.48. Сечения ФН пачечного сигнала.
219
Fд
χ=
Fд
1
2
1
T
τ
1
MT
T
2τи
Рис. 4.49. Диаграмма неопределенности пачечного сигнала.
Таким образом, по сравнению с одиночным радиоимпульсом, пачка
радиоимпульсов позволяет в 𝑀η раз улучшить меру разрешения по
радиальной скорости 𝛿𝑉 , сохраняя такой же меру разрешения по
дальности 𝛿𝑅.
Отрицательным свойством эквидистантного пачечного сигнала
является неоднозначность ФН в главных сечениях. Как было показано в
разделе 1, это приводит к ситуации, когда пачечный сигнал с периодом Т
не
может
удовлетворить
требованиям
однозначных
измерений
и радиальной скорости до 𝑉
диапазонах дальности до 𝑅
в
. При этом
одновременно не выполняются условия:
2𝑅
𝑐
Неоднозначность
измерения
Т
𝜆
2𝑉
скорости
может
быть
устранена
различными способами. Основным из них является вобуляция периодов
повторения, нарушающая периодичность импульсов во времени. В этом
случае пики вдоль оси 𝛥𝐹д «размазываются», а минимальный интервал 𝑇
в такой неэквидистантной пачке должен удовлетворять только условию
однозначного измерения максимальной дальности 𝑇
220
2𝑅
/с.
Для пачечного сигнала аппроксимация центрального пика ФН
параболоидом практически не отличается от аппроксимации 4.64 для
одиночного импульса, в которой во второе слагаемое вместо и следует
подставить
МТ 𝜒 ∆𝜏, ∆𝐹д
1
2
∆
МТ∆𝐹д
и
(4.67).
4.6.4. ФН Линейно-частотно-модулированный радиоимпульса.
ЛЧМ радиоимпульс с нарастающей частотой показан на Рис. 4.50. Он
описывается формулой:
𝑈 cos 2𝜋𝑓 𝑡
𝑢 𝑡
𝜋
∆𝑓
𝑡
𝜏и
, |𝑡 |
|𝑡 |
0,
𝜏И
2
𝜏И
2
(4.68)
u(t)
t
τи
Рис. 4.50. ЛЧМ радиоимпульс с нарастающей частотой
Мгновенная частота сигнала 𝑓 𝑡 изменяется по линейному закону:
1 d
2𝜋𝑓 𝑡
2𝜋 d𝑡
𝑓 𝑡
𝜋
∆𝑓
𝑡
𝜏и
𝑓
∆𝑓
𝑡
𝜏И
(4.69)
Таким образом, на длительность импульса частота изменяется в
пределах 𝑓
∆
- 𝑓
∆
, где ∆𝑓
соответствующая полосе ЛЧМ сигнала ∆𝑓И
– полная девиация частоты,
∆𝑓 .
Комплексная амплитуда ЛЧМ сигнала с прямоугольной огибающей
представляется в виде:
221
𝑈 𝑒𝑥𝑝 𝑗𝜋
х 𝑡
∆𝑓
𝑡
𝜏И
𝜏И
2
𝜏И
2
|𝑡 |
,
|𝑡 |
0,
(4.70)
Пример АЧС для ЛЧМ сигнала при Б = 30 показан на Рис. 4.42. Из
этого
рисунка
видно,
что
спектр
огибающей
(4.69)
близок
к
прямоугольному. Причём эта аппроксимация, тем точнее, чем больше база
Б
∆𝑓 𝜏и сигнала.
Воспользовавшись (4.43) найдём выражение для ФН ЛЧМ сигнала
вида (4.69):
⎧ sin 𝜋 𝛥𝐹д
𝜒 𝛥𝜏, 𝛥𝐹д
⎨
⎩
∆
∆𝑓
𝜋 𝛥𝐹д
𝜏И
И
∆𝑓
0,
∆
И
𝜏И
|∆𝜏|
,
|𝑡 |
|𝑡 |
⎫
𝜏И
𝜏И ⎬
⎭
(4.71)
Вид трёхмерной функции (4.70) иллюстрирует Рис. 4.52, а её сечения
вертикальными плоскостями 𝛥𝐹д
0 и 𝛥𝜏
0 показаны на Рис. 4.53а,б
соответственно. Диаграмму неопределённости в виде эллипса и его
параметры иллюстрирует Рис. 4.54.
Рис. 4.51. Трехмерная ФН ЛЧМ сигнала.
222
а)
б)
F
Рис. 4.52. Главные сечения ФН ЛЧМ сигнала вдоль осей Δτ (а) и ΔF (б).
ΔFд
χ=
1
2
Δfд
Δτ
1
τи
1
Δfд
τи
Рис. 4.53. Эллипс неопределенности ЛЧМ сигнала.
Из приведённых рисунков видно, что ФН имеет скошеную форму, а
параметры 𝛥𝐹д и 𝛥𝜏, соответствующие максимуму ФН, можно связать
уравнениями:
𝛥𝐹д
∆𝑓
𝛥𝜏,
𝜏И
223
(4.71а)
𝛥𝐹д
𝜏 ,
𝑓 И
𝛥𝜏
(4.71б)
Эти уравнения имеют различную трактовку. Уравнение (4.71а)
показывает, что два сигнала с разностью сдвигов доплеровских частот на
𝛥𝐹д и разностью временных задержек на 𝛥𝜏
д
𝜏И
оказываются
совпадающими, т.е. неразрешёнными. В свою очередь эквивалентное
уравнение (4.71б) чаще трактуют как «скоростную» ошибку измерения
дальности. Это означает, что если скорость цели (частота Доплера)
неизвестны, то согласно (4.71б) при определении дальности возникнет
ошибка, равная 𝛥𝑅
𝑐𝛥𝜏 2, пропорциональная отношению 𝛥𝐹д /∆𝑓 и тем
большая, чем больше и .
Скоростная ошибка определения дальности при использовании ЛЧМ
сигнала является его основным недостатком, которым можно пренебречь
если априорный интервал доплеровских частот отражений от цели не
превышает 1/𝜏И . Если этой ошибкой пренебречь нельзя, то в РЛС по двум
последовательно
измеренным
дальностям
рассчитывают
значение
радиальной скорости 𝑉 и в следующее измерение дальности вносится
соответствующая поправка.
Центральный пик ФН ЛЧМ сигнала аппроксимируется параболоидом
вида:
𝜒 𝛥𝜏, 𝛥𝐹д
1
2 𝛥𝑓 𝛥𝜏
𝜏И 𝛥𝐹д
2𝛥𝑓 𝜏И
1
𝛥𝜏𝛥𝐹д
𝛥𝑓 𝜏И
(4.73)
Согласно (4.72) аппроксимирующий эллипс сечения 𝜒 𝛥𝜏, 𝛥𝐹д
1/2
определяется уравнением:
𝛥𝑓 𝛥𝜏
𝜏и 𝛥𝐹д
1
𝛥𝜏𝛥𝐹д
𝛥𝑓 𝜏И
2𝛥𝑓 𝜏И
1
4
(4.74)
Согласно 4.73 аргументы ФН ЛЧМ сигнала оказываются полностью
корелированными, что соответствует к=1 в (4.50).
В заключение отметим, что ЛЧМ сигнал является одним из самых
распространённых в радиолокации. Этот вид модуляции позволяет
224
независимо выбирать полосу и длительность сигнала, а, следовательно, и
меры разрешения по дальности и радиальной скорости. Для многих
практических задач отмеченный недостаток, связанный со скоростной
ошибкой
дальности,
компенсируется
высокой
доплеровской
устойчивостью, т.е. возможностью работать в очень широком диапазоне
радиальных скоростей целей одним каналом обработки.
4.6.5. ФН фазоманипулированных радиоимпульсов
Рассмотрение начнём с сигналов с внутриимпульсной фазовой
манипуляцией, описанных в подразделе 4.3.3. Он образуется путем
разбиения простого импульса длительностью 𝜏И на n равных частей,
𝜏И /𝑛 и представляет собой
каждая из которых имеет длительность 𝜏
короткий парциальный импульс (см. Приложение 1).
Фазовая манипуляция сводится к изменению начальных фаз
парциальных радиоимпульсов. В общем случае фазы могут принимать
любые дискретные значения в диапазоне 0
2𝜋. На практике, как правило,
используют ФМ сигналы с двумя значениями фаз: 0 и 𝜋(см. Рис. 4.31).
Чередование фаз осуществляется по определённому закону, который
представляет собой кодообразующую последовательность. В частности, в
подразделе 4.3.3 был рассмотрен СФ для ФМ сигнала на основе кода
Баркера.
Комплексная амплитуда ФМ сигнала с манипуляцией 0, 𝜋 является
действительной функцией, а для первого парциального импульса имеет
вид:
𝑋 𝑡
1,
0,
0
𝑡
𝑡
0, 𝑡
𝜏
𝜏
(4.75)
Тогда комплексная амплитуда ФМ сигнала в целом описывается
выражением:
𝑋 𝑡
𝑞𝑋 𝑡
225
𝑖𝜏
(4.76)
где 𝑞 – последовательность, которая описывает код сигнала (0,1), что,
например, соответствует фазам 0, 𝜋 .
Если частотный спектр первого парциального импульса:
𝐺 𝑓
𝑋 𝑡 exp
𝑗2𝜋𝑓𝑡 𝑑𝑡,
(4.77)
то спектр ФМ сигнала в целом определяется соотношением:
𝑋 𝑡 𝑒
𝐺 𝑓
𝑑𝑡
𝑓
𝐺
𝑞𝑒
,
(4.78)
Вид амплитудно-частотного спектра ФМ сигнала с указанием его
параметров показан на Рис. 4.28. Ширина этого спектра определяется
длительностью парциального импульса ∆𝑓И
1/𝜏и , а его база Б
И
n
1, т.е. сигнал является «большебазовым».
Определим ФН фазоманипулированного сигнала с единичной
энергией. Подставляя (4.75) в (4.38а), получим:
𝜒 𝛥𝜏, 𝛥𝐹д
1
2
𝑞𝑞
𝑈 𝑠
𝑖𝜏 𝑈 𝑠
𝑝𝜏 𝑒
∆
д
𝑑𝑠
(4.79)
При большом числе парциальных импульсов 𝑛 ≫ 1 кодообразующая
последовательность может оказаться достаточно «хаотичной», а сам
сигнал шумоподобным (см. Рис. 4.54). В этом случае сам пик имеет
симметричную (нескошеную) форму, а меры разрешающей способности
вдоль осей 𝛥𝜏и 𝛥𝐹д соответственно равны 𝛿𝜏
𝜏 и 𝛿𝐹д
1/𝜏 . При этом
оптимальный уровень «основания» (средний уровень боковых лепестков)
за пределами главного пика ФН фазомодулированного сигнала составляет:
𝑙осн
1
∆𝑓и 𝜏и
1
√𝑛
226
(4.80)
Рис. 4.54. ФН при n≫1 для ФКМ сигнала
Как было показано в подразделе 4.3.3, при малом числе элементов n
известные кодообразующие последовательности позволяют получать
уровень «пьедестала», меньший, чем (4.79) в плоскости 𝛥𝐹д
для кодов Баркера 𝑙осн
0. Например,
1/𝑛, но как уже отмечалось, они известны только
для n = 3, 4, 5, 7, 11, 13. Естественно, что при 𝛥𝐹д
0 в косых сечениях
могут наблюдаться значительные выбросы боковых лепестков, как видно
из Рис. 4.55.
Рис. 4.55. Трехмерная ФН ФКМ радиоимпульса
Главный пик ФН аппроксимируется параболоидом:
227
𝜒 𝛥𝜏, 𝛥𝐹д
1
2
𝛥𝜏
𝜏И
𝜏И 𝛥𝐹д
(4.81)
а диаграмма неопределённости эллипсом:
𝛥𝜏
𝜏
(4.82)
1⁄4
𝜏И 𝛥𝐹д
В соответствие с 4.81 кореляция аргументов ФН отсутствует, что
соответствует
к=0
в
4.50.
Для
непрерывных
ФКМ
сигналов,
манипулированных по фазе 0, 𝜋, часто используют непериодические
кодообразующие последовательности, составленные по определённому
правилу, например, М-последовательности, рассмотренные в 4.3.3.
Заметим, что, как и для ЛЧМ сигнала, достоинством ФКМ сигнала
является
возможность
независимо
выбрать
меры
разрешения
по
временному запаздыванию и частоте Доплера (дальности и радиальной
скорости).
Положительным
у
ФКМ
сигнала
является
отсутствие
«скоростной» ошибки измерения дальности. Но с другой стороны, ФМ
сигнал обладает сниженой доплеровской устойчивостью по сравнению с
ЛЧМ сигналом той же длительности. Поэтому в широком диапазоне
заданных
радиальных
использовании
ФКМ
скоростей
𝑉
целей
(частот
сигналов
в
РЛС
требуется
многоканальную доплеровскую обработку (фильтрации).
228
Доплера)
при
реализовать
5. МНОГОКАНАЛЬНОЕ ОБНАРУЖЕНИЕ СИГНАЛОВ НА ФОНЕ
КОРРЕЛИРОВАННЫХ ГАУССОВСКИХ ПОМЕХ
Настоящий раздел посвящен задаче обнаружения целей в многоканальных РЛС.
Теория многоканального обнаружения на фоне коррелированных помех является
обобщением и развитием теории одноканального приема, рассмотренного в разделе 3.
Под многоканальным приемом здесь понимается прием сигналов на фоне активных
помех в РЛС с антенной решеткой (ФАР), а также пачек импульсов на фоне пассивных
помех в РЛС с системой межпериодной обработки на основе устройств СДЦ. Внешняя
помеха может быть активной, пассивной или комбинированной. В общем случае она
является нестационарна и коррелированной по времени и пространству. Плотность
вероятности помехи будем полагать гауссовской.
5.1.
Многоканальные обнаружители дискретизированного
сигнала с полностью известными параметрами на фоне
нестационарных коррелированных гауссовских помех
Рассмотрим
Μ-
канальную приемную систему в виде антенной
решетки (АР), показанной на Рис. 5.1. Элементы АР расположены вдоль
линии или в одной плоскости. Пусть в пространстве имеется один источник
сигнала (цель) и несколько источников помех. Будем полагать, что сигнал
имеет полностью известные параметры, а помеха представляет собой
аддитивную смесь внешних помех и внутренних шумов каналов приема. В
общем случае она может быть нестационарным, коррелированным и
гауссовским случайным процессом.
Как и в разделе 3, требуется определить выражения для достаточных
статистик и синтезировать схемы обнаружителей для этой ситуации.
При многоканальном приёме принимаемое колебание описывается
векторной функцией
𝒚 𝑡
‖𝑦 𝑡 ‖
‖𝑦 𝑡 𝑦 𝑡 … 𝑦
𝑡 ‖
где yi (t) – колебание, принятое i - м каналом АР.
После дискретизации каждая из
на
интервале
наблюдения
может
M
скалярных функций yi (t) (Рис. 5.1)
быть
представлена
своими
дискретными отсчетами. Это позволяет от вектора 𝒚 𝑡 размера
к вектору 𝒚 размера
K ML :
229
M
L
перейти
‖𝑦 𝑦 … 𝑦 ‖
𝒚
𝐴𝒙
𝒏,
где, как и ранее, А = 1 при наличии сигнала и А = 0 – в его отсутствие.
𝒙
‖𝑥 … 𝑥 ‖ , 𝒏
‖𝑛 … 𝑛 ‖
– векторы отсчетов сигнала и помехи
соответственно.
y1(t)
1
t
d
y2(t)
2
t
yM(t)
M
t
t2
t1
ti
tL
Рис. 5.1. Колебания на входах приемных каналов
Как и в формуле 3.31, достаточную статистику для обнаружения
будем определять на основе логарифм отношения правдоподобия
𝑙𝑛𝑙
Здесь
плотность
многомерным
𝑙𝑛𝑝сп 𝒚
𝑙𝑛𝑝п 𝒚 .
распределения
нормальным
законом
помехи
в
(5.1)
𝑝п 𝒚
канонической
описывается
записи.
(см.
Приложение 2)
𝑝п 𝒚
2𝜋
/
|𝛗|
/
𝑒𝑥𝑝
𝒚 𝝋 𝟏𝒚 ,
(5.2)
где корреляционная матрица (КМ) φ помехи имеет вид
… 𝜑
𝜑
𝜑
… 𝜑
𝜑
𝜑
𝑀п 𝒚𝒚
𝝋 𝑀 𝒏𝒏
…
… …
…
… 𝜑
𝜑
𝜑
𝜎
𝜌 𝜎𝜎
…
𝜌 𝜎𝜎
𝜌 𝜎𝜎
𝜎
…
𝜌 𝜎𝜎
230
… 𝜌 𝜎𝜎
… 𝜌 𝜎𝜎
…
…
…
𝜎
(5.3)
𝜑
Она является симметричной
𝐾
𝐾
𝑀
𝜑
и имеет размерность
𝑀. В общем случае КМ может быть недиагональной, так как
из-за корреляции внешней помехи ее частные коэффициенты корреляции
(КК) 𝜌
не равны нулю. Она также может иметь неодинаковые
диагональные элементы – дисперсии (мощности) отсчетов 𝜎
𝜑
(вследствие нестационарности помехи и возможной неиндентичности
приемных
каналов).
В
формуле
(5.3.)
частные
1
𝐿
𝑦 𝑡 𝑦∗ 𝑡
КК
определятся
соотношением:
𝜌
Это означает, что они вычисляются путем усреднения кореляции
отсчетов между i и j каналами, взятыми в один и тотже момент времени
𝑡 . Поэтому размерность матрицы 𝝋 не 𝑀𝐿
𝑀𝐿, а M
M.
В (5.2) также входят определитель (детерминант) |𝝋| матрицы 𝝋 и
матрица 𝝋 𝟏 , обратная матрице 𝝋.
При наличии в принимаемом колебании 𝒚 сигнала 𝒙 𝐴
1 , с
полностью известными параметрами совместная плотность распределения
смеси сигнала и помехи определяется соотношением:
𝑝сп 𝒚
2𝜋
⁄
|𝝋|
⁄
𝑝п 𝒚
𝑒𝑥𝑝
𝒙
1
𝒚
2
𝒙 𝝋
𝒚
𝒙
(5.4)
Подставляя (5.2) и (5.4) в (5.1), и пользуясь правилом перемножения
матриц получим
𝑙𝑛𝑙
1
𝒚
2
𝒙 𝝋
1
𝒚 𝝋 𝒙
2
𝒚
𝒙
1
𝒚 𝝋 𝒚
2
1
𝒙 𝝋 𝒙
2
𝒙 𝝋 𝒚
(5.5)
Заметим, что все слагаемые в (5.5) являются скалярами. Учитывая,
что скаляры не изменяются при транспонировании, а матрица 𝝋
231
–
𝝋
симметричная 𝝋
, можно показать, что слагаемые в круглой
скобке 5.5 равны между собой
𝒙 𝝋 𝒚
𝒙 𝝋 𝒚
𝒚 𝝋 𝒙.
Тогда логарифм отношения правдоподобия примет вид
𝑙𝑛𝑙
𝑦 𝝋 𝟏𝒙
1 𝑻 𝟏
𝒙 𝝋 𝒙
2
𝜉
𝑞 /2
𝑞 𝜉н
(5.6)
𝑞/2
Входящие в (5.6) параметры имеют следующий смысл
𝒚 𝝋 𝒙
𝜉
𝒚 𝒓,
(5.7а)
– весовая сумма, или
𝜉н
𝜉/𝑞 -
(5.7б)
– нормированная весовая сумма.
𝑞
𝒚 𝝋 𝒙
𝒙 𝒓
(5.8)
– параметр обнаружения,
𝒓
𝝋 𝒙
(5.9)
– весовой вектор обработки.
Согласно (5.6) весовая сумма
и нормированная весовая сумма н
являются, как и в п. 3.3 достаточными статистиками. В оптимальных
обнаружителях для принятия решения о наличии или отсутствии цели они
должны
сравниваться
с
соответствующим
порогом.
Оптимальные
обнаружители, здесь также включают в себя устройство оптимальной
обработки (устройство вычисления достаточной статистики) и пороговое
устройство (см. рис. 5.2).
На
Рис.
5.2а
показана
структурная
схема
обнаружителя,
реализующего вычисление достаточной статистики по формулам 5.7. Для
частного случая K=3 вектор входной реализации y имеет три составляющие
𝒚
‖𝑦 𝑦 𝑦 ‖ , как показано на Рис. 5.2б. Схема состоит из векторно-
матричного перемножителя, обеспечивающего операцию
𝑦 𝝋
𝑦
𝑦
𝜓
𝜓
𝜓
𝑦 ∙ 𝜓
𝜓
𝜓
232
𝜓
=
𝑦𝜓
𝑦 𝜓
𝑦 𝜓
=
𝜂
𝜂
𝜂
𝑦𝜓
𝜓
𝑦 𝜓
𝜓
𝑦 𝜓
𝑦𝜓
𝑦 𝜓
𝑦 𝜓
=
𝜼 ,
и перемножителя векторов (скалярного перемножителя векторов)
𝑥
𝜼 𝒙
𝜂
𝜂𝑥
𝜂
𝜂 ∙
𝑥
𝜂 𝑥
𝜂 𝜓
𝜂 𝑥
𝜉
𝑥
где ij – элементы матрицы, 𝝋 , обратной КМ.
Векторно-матричный
перемножителей
и
K
перемножитель состоит из
перемножитель
весовых
K
включает
сумматоров.
в
Каждый
себя
K2
векторный
перемножителей и одного сумматора.
Рассмотрим преобразование 𝒚 𝝋
𝜼 , которое реализуется с
помощью векторно-матричного перемножителя на рис. 5.2, а, б.
Весовые коэффициенты i - го сумматора (здесь i ∈ 1,3) определяются
элементами i - го столбца матрицы 𝝋 , обратной корреляционной матрице
помехи 𝝋. В результате весового суммирования элементов вектора
отсчетов входной реализации 𝒚 образуется преобразованный K-мерный
вектор
𝜼
‖𝜂 𝜂 ⋯ 𝜂 ‖,
имеющий
составляющие.
233
помеховую
и
сигнальную
ηT = yTφ
yT
ξ
𝐴
ПУ
φ -1
x
ξ0
a)
y1
ψ 11
y2
ψ 21
y3
∑
η1
x1
ψ 31
ψ 12
ψ 22
∑
η2
yT
ξ
𝐴
ПУ
ξ0
ψ 31
ψ 33
ξ
x2
ψ 32
ψ 32
∑
∑
η3
x3
б)
yн = d-1y
y
𝐴
ξ
ПУ
d-1
ξ0
φ
xн
φн-1
𝐴
ПУ
ξ0
-1
d -1
x
x
в)
Рис. 5.2. Оптимальные многоканальные обнаружители известных
сигналов на фоне коррелированных помех
Корреляционная
матрица
преобразованного вектора 𝜼
𝑀п 𝜼𝜼
𝑀 𝜼п 𝜼п
помеховой
составляющей
𝜼п
𝝋 𝒚 представляется формулой
𝝋 𝑀п 𝒚𝒚 𝝋
𝝋 𝝋𝝋
𝝋
(5.10)
Она является обратной корреляционной матрице 𝝋 помеховой
составляющей 𝒏 вектора отсчетов принимаемого колебания 𝒚. Поэтому
преобразование
𝝋 𝒚 𝒚 𝝋
получило
название
«обращающего».
Соответственно и фильтр с импульсной ( точнее импульсно-матричной)
характеристикой 𝝋
в литературе называют «обращающим». При таком
234
преобразовании каждая из помеховых составляющих п i вектора 𝜼 имеет
при фиксированном значении ii минимально возможную дисперсию для
заданной
помеховой
уменьшение
обстановки
мощности
(см.
Приложение
преобразованной
помехи
7).
по
Поэтому
сравнению
с
мощностью входной коррелированной помехи в данном случае означает её
компенсацию наилучшим образом. Причем эта минимизация мощности
помехи является составной частью процесса максимизации отношения
сигнал/помеха на выходе устройства оптимальной обработки.
Для
исключения
тривиального
решения
ii 0 ,
означающего
запирание приемника, при котором на выходе векторно-матричного
перемножителя будет наблюдаться нулевой уровень, как помехи, так и
сигнала, эти элементы должны быть зафиксированы.
Для максимизации отношения сигнал/помеха, коррелированная
помеха компенсируется (вычитаются помеховые составляющие), а сигнал
накапливается
(сигнальные
составляющие
суммируются)
векторного перемножения 𝜼 𝒙 в весовом сумматоре ∑
Весовые
коэффициенты
при
накоплении
будут
после
𝜂 𝑥 (Рис. 5.2, б).
пропорциональны
составляющим xi вектора ожидаемого сигнала 𝒙. Таким образом для
компенсации коррелированной помехи главное значение имеет структура
корреляционной матрицы 𝝋 и ей обратной 𝛗 . Это связано с тем, что
любой случайный процесс полностью определяется своей КМ, которая в
радиолокации точно никогда не известна, а только может быть оценена.
5.2.
Схемы многоканальных обнаружителей в зависимости от
представлений корреляционной матрицы
Для того, чтобы получить другие варианты многоканального
оптимального обнаружителя выражение для достаточной статистики 𝜉
(5.7) представим в эквивалентной форме
235
𝜉
𝒙
𝒚 𝝋
𝒚 𝝋 𝒙
𝒚 𝒓
(5.11)
Это означает, что схемы оптимальных обнаружителей могут
различаться порядком выполнения операций, приводящим к одному и тому
же результату. Согласно (5.11) схема Рис. 5.2а трансформируется к виду,
показанному на Рис. 5.2в. В этой схеме весовой вектор 𝒓 формируется
сразу, а не последовательно, как на Рис. 5.2а.
Еще
одну
разновидность
последовательным
проведением
оптимального
операций
обнаружителя
компенсации
помехи
с
и
накопления сигнала получим путем представления корреляционной
матрицы помехи (5.3) с элементами 𝜑
𝜌 𝜎𝜎 𝑖
𝑗 и𝜑
𝜎 в виде
произведения матриц
𝝋
где
d=
𝜎1
𝒅𝝋н 𝒅,
(5.12)
– диагональная матрица размерности KxK со
𝜎2
⋱
𝜎𝐾
среднеквадратичными
значениями
(отклонениями) помехи в каналах приема на главной диагонали, 𝝋н –
нормированная матрица коэффициентов корреляций, для которой 𝜑н
𝜌 при 𝑖
𝑗, а 𝜑
1. Например, при K = 2 равенство (5.12) имеет вид
𝜌𝜎 𝜎
𝜎
𝜎
𝜌𝜎 𝜎
𝜎
0
1
𝜌
0
𝜎
𝜌
1
𝜎
0
0
𝜎
Здесь учтено, что КМ является симметричной
12 21 .
и
вследствие этого, матрицу, обратную 𝝋 можно представить следующим
образом
𝝋
1⁄𝜎1
d‐1 = ‐
1⁄𝜎2
⋱
1⁄𝜎𝐾
𝒅 𝟏 𝝋н 𝟏 𝒅
𝟏
матрица,
(5.13)
обратная
диагональной
матрице d
В частности, при
K 2
равенство (5.13) преобразуется к виду
236
𝝋н
1
1
1⁄𝜎
𝜌⁄𝜎 𝜎
𝜌
1⁄𝜎
0
𝜌⁄𝜎 𝜎
1⁄𝜎
0
1⁄𝜎
1
1
1
𝜌
𝜌
𝜌
1
1⁄𝜎
0
(5.14)
0
1⁄𝜎
Подставляя (5.13) в (5.7) и (5.8) получим
𝜉
𝒚 𝒅
𝛗н 𝒅 𝒙
(5.15а)
𝑞
𝒙 𝒅
𝛗н 𝒅 𝒙
(5.15б)
Cхема оптимального обнаружителя, построенного на основе 5.15а,
показана на Рис. 5.2г. Операции 𝒚 𝒅
𝒚н и 𝒅 𝒙
𝒙н соответствуют
нормированию отсчетов принимаемых и ожидаемых колебаний по
среднеквадратическому значению помехи i . В совокупности эти операции
дают нормировку к мощности помехи.
Корреляционная
матрица
преобразованного вектора 𝒚н
помеховой
составляющей
𝒚пн
𝒅 𝒚 с учетом (5.11) определяется в виде
п [ y н y н ] d 1 п [ y y ] d 1 d 1d Н d d 1 Н .
Поскольку элементы главной диагонали матрицы φ н равны единице,
то это означает, что дисперсии (мощности) коррелированных отсчетов
преобразованной помехи стали одинаковыми и равными единице. Следует
заметить, что при этом пропорционально уменьшились и мощности
отсчетов входного сигнала x.
Последующая
компенсации
составляющие
операция
коррелированной
накапливаются
𝒚н 𝝋н
на
помехи.
в
Рис.
5.2, г
После
весовом
соответствует
этого
сумматоре.
сигнальные
Весовые
коэффициенты в данном случае определяются составляющими xнi вектора
нормированного ожидаемого сигнала 𝒙н .
Более подробно операции оптимальной обработки будут пояснены
также в п. 5.3 на примере двухэлементной выборки (𝐾
237
2).
Таким образом, при оптимальной обработке сигнала на фоне
коррелированной помехи по сравнению с согласованной обработкой в
условиях некоррелированного шума (см. п. 3.3.1) дополнительно должна
проводиться операция компенсации коррелированной помехи.
Наряду с поэтапным проведением операций компенсации помехи и
накопления сигнала в соответствии с (5.7) и (5.11) возможна и единая
весовая обработка на основе последнего равенства в 5.10
𝜉
𝒚 𝒓
𝑦 𝑟,
а это означает, что в этом варианте входная выборка сразу перемножается
с заранее вычисленным весовым вектором r, а затем когерентно
накапливается. В этом случае весовые коэффициенты в весовом сумматоре
𝒚 𝒓 определяются составляющими 𝑟 весового вектора 𝒓
𝝋 𝒙.
Кроме рассмотренных схем оптимальных обнаружителей, возможны
и другие их варианты. Они связаны, в частности, с представлением КМ
𝝋
помехи
в
виде
суммы
или
произведения
матриц.
Наиболее
распространенным является представление КМ 𝝋 в виде произведения
треугольных матриц, которые являются ее корнями.
𝛗
𝑯𝑯
𝐻
𝐻
𝐻
𝐻
0
𝐻
𝐻
𝐻
(5.16)
Например, при K = 4
𝜑
𝜑
𝜑
𝜑
𝜑
𝜑
𝜑
𝜑
𝜑
𝜑
𝜑
𝜑
𝜑
𝜑
𝜑
𝜑
Каждый элемент 𝜑
0
0
𝐻
𝐻
0
0
0
𝐻
𝐻
0
0
0
𝐻
𝐻
0
0
Η
на соответствующие
элементы j- го столбца матрицы HT, согласно соотношениям
𝐻 𝐻
𝜑
𝐻
𝐻
𝐻
𝐻
матрицы 𝝋 представляет собой сумму
произведений элементов i - й строки матрицы
𝜑
𝐻
𝐻
𝐻
0
;𝜑
𝐻 𝐻
238
→𝐻
𝜑 /𝐻
𝜑
𝐻 𝐻
𝐻 𝐻
𝐻 𝐻
𝜑
→𝐻
→𝐻
𝜑
𝐻
;
𝜑 /𝐻
и т.д.
Тогда каждый последующий элемент матрицы
Η
определяется через
ее ранее найденные диагональные и поддиагональные элементы, т.е. в
общем виде вычисляются через рекуррентные формулы
𝐻
𝑡
𝜑 ∑
𝐻 𝐻
,𝐻
𝐻
𝜑
/
𝐻
,𝑗
1,2 … 𝑖
1.
(5.17)
Такой метод разложения матрицы на треугольные сомножители
называют методом Холецкого. В литературе матрицы H и HT часто
называют нижне-верхним и верхне-нижним сомножителями Холецкого.
При использовании этих сомножителей соотношения (5.7) преобразуются
к виду
𝜉
Здесь
𝒙
применено
𝑯
𝑯𝑯
𝒚 𝑯𝑯
𝑯
𝑯 𝒚
известное
𝑯 𝒙
свойство
(5.18)
корней
матрицы
𝝋
Построенная в соответствии со вторым равенством в (5.18), схема
устройства оптимальной обработки представлена на Рис. 5.3.
На первом этапе обработки вектор отсчетов принимаемой реализации
𝐲 подвергается линейному преобразованию 𝑯 𝒚
𝑽. Корреляционная
матрица помеховой составляющей VП преобразованного вектора V
определяется следующим образом:
𝑀п 𝐯𝐯
𝑯 𝑀п 𝒚𝒚
𝑯
𝑯 ,𝝋 𝑯
239
𝑯 𝑯𝑯 𝑯
𝑰
т.е. элементы помеховой составляющей этого вектора vп имеют единичную
y
(одинаковую) дисперсию и взаимно не
V = H‐1y
коррелированы. Следовательно, выборка
φ
H‐1
нестационарной
( i2 2j )
коррелированной
преобразовалась
в
выборку
𝜎
𝜎
стационарной
H‐1y
n
помехи
𝑽п
1
некоррелированной помехи (белый шум).
x
Рис. 5.3. Устройство
оптимальной обработки с
“обелением” помехи
Произошло
“обеление”
сопровождающееся
Поэтому
её
фильтр
характеристикой
H
помехи,
компенсацией.
с
импульсной
часто
называют
«обеляющим».
Последующий этап состоит в согласованной с новым (искаженным)
сигналом H-1x обработке преобразованной выборки H-1y.
Заметим, что при реализации рассмотренной ранее операции 𝜼
𝒚 𝝋
(Рис. 5.2, а) осуществлялось «обращение» («переобеление»)
помехи. При этом полезный сигнал, проходя «обращающий» фильтр, не
искажается, и поэтому дополнительной корректирующей обработки не
требуется. Это означает, что после компенсации помехи дальнейшая
обработка является согласованной с сигналом x.
Основной особенностью многоканальной обработки является то, что
для
ее
оптимизации
требуется
процедура
компенсации
внешней
коррелированной помехи. Эта помеха исчерпывающе задается своей КМ
𝝋, которая допускает различные представления. В зависимости от этих
представлений существуют различные способы получения матрицы ей
обратной 𝛗 , которая определяет необходимые весовые коэффициенты
для подавления помехи. Поясним смысл понятий «обеления» для
гауссовой коррелированной помехи. В приложении 7 доказано, что для
240
минимизации мощности помехи необходимо, чтобы она превратилась в
белый гауссовский шум, т.е. стала 𝛿
коррелированной.
Для лучшего понимания, (но не строгого) найдем аналогию этой процедуры в
игровых видах спорта, например в футболе. Представьте, что Вы тренер команды,
которой предстоит встреча с сильным соперником уровня «Барселоны». Для
подготовки к игре Вы должны оценить возможности этой команды. Для этого мало
знать силу (мощность) каждого игрока противника, которые можно интегрировать как
диагональные КМ размерности 11х11 (по числу игроков в команде). Нужна полная КМ,
определяющая степень сыгранности (коэффициенты корреляции) между игроками
соперника. В этом случае Вы имеете полную информацию для нейтрализации
противника, которого следует рассматривать как помеху для когерентных действий
собственных игроков. Таким образом, стратегия на игру будет состоять из двух этапов.
На первом этапе разрушаются игровые связи соперника, что должно привести к
«хаотичности» действий его игроков. Вследствие декорреляции действия команды
соперника становятся подобны шуму, который при приближенном равенстве
«мощности» игроков становится белым. Второй этап стратегии – когерентное
сложение усилий игроков своей команды с учетом ослабления (искажения) их
возможностей, затраченных на нейтрализацию соперника. Заметим, что «обращение»
соперника в такой интерпретации формально означает удаление команды противника
с поля, т.е. отсутствие помехи. Естественно, что в этой ситуации, необходимо просто
когерентно сложить усилия собственных игроков в направлении ворот соперника.
5.3.
Пример оптимальной обработки двухэлементной выборки.
Показатели ее качества
В качестве поясняющего примера рассмотрим обработку выборки y
с числом элементов 𝐾
y1(t)
2: 𝑦
‖𝑦 𝑦 ‖ . Такая двухэлементная выборка
соответствует,
y1
Kt
напряжениям
например,
на
выходах
мгновенным
двух
элементов
антенной решетки, отсчитанных в один и тот же
y2(t)
y2
t1
Kt
Рис. 5.4.
Двухэлементная
пространственная
выборка
момент времени (Рис. 5.4). Под внешней
помехой будем понимать коррелированную по
пространству
(АШП),
активную
шумовую
создаваемую
одним
помеху
внешним
источником.
Используя
5.12,
корреляционную
матрицу помехи (АШП + внутренний шум) представим в виде
𝝋
𝜑
𝜑
𝜑
𝜑
𝜎
𝜌𝜎 𝜎
𝜌𝜎 𝜎
𝜎
𝜎
0
241
0
𝜎
1
𝜌
𝜌
1
𝜎
0
0
𝜎
где 𝜎 , 𝜎
– дисперсии элементов выборки помехи в каналах, 𝜌 –
коэффициент пространственной (междуканальной) корреляции помехи
|𝜌 |
1 .
После обращения матрицы 𝝋 получим ей обратную 𝝋
в виде 5.14.
Подставим 5.14. в выражения (5.15, а), (5.15, б) и после
преобразований получим соотношения для достаточной статистики
(весовой суммы) и параметра обнаружения
1
𝜉
1
𝜌
1
1
𝑦
𝜌
1
𝑞
1
𝑦
𝜎
𝜌
н
𝜌𝑦
𝑥
𝜎
𝜌
𝑦
𝜎
где
𝑦н
𝑦 ⁄𝜎 ; 𝑥 н
н
𝑥
𝑥
𝜎
1
1
𝑥
𝜎
𝜌
𝑦
𝜎
2𝜌
𝑥
𝑥 ⁄𝜎
𝑦
н
𝜌
𝑦
𝜎
𝜌𝑦
н
𝑥
𝜎
н
𝑥
(5.19)
н
𝑥 𝑥
𝜎𝜎
𝑥
н
(5.20)
2𝜌𝑥 н 𝑥
н
-
н
отсчеты,
,
нормированные
к
среднеквадратическому значению шума.
Структурная
схема
устройства
оптимальной
обработки
двухэлементной выборки, построенная в соответствии с (5.19), приведена
на Рис. 5.5.
1/σ1
x1/σ1
y1
∑
-ρ
y2
1/σ2
Нормирование
∑
1
1
𝜌2
ξ
∑
x2/σ2
Компенсация
АШП
Накопление
сигнала
Рис. 5.5. Устройство оптимальной обработки двухэлементной выборки
соответствует формуле 5.19
242
В литературе схема, показанная на Рис. 5.5, получила название
«решетчатый фильтр». В этом устройстве выполняются следующие
операции:
–
нормирование
принимаемых
𝑦 ⁄𝜎
и
𝑥 ⁄𝜎
ожидаемых
напряжений по среднеквадратическому значению отсчетов помехи;
– междуканальная компенсация коррелированной по пространству
активной шумовой помехи 𝑦 ⁄𝜎
–
междуканальное
𝜌𝑦 ⁄𝜎 ;
(пространственное)
накопление
сигнальных
составляющих.
Более
подробно
рассмотрим
операцию
междуканальной
компенсации коррелированной помехи. Заметим, что суммарная помеха
представляет собой аддитивную смесь внешней шумовой помехи и
внутреннего шума. В приемных каналах внутренний шум порожден
различными независимыми источниками. Поэтому внутренний шум
является некоррелированным между каналами приема.
Активная
шумовая
помеха
создается
поставщиком
АШП
с
фиксированного углового направления (Рис. 5.6) и её колебания, принятые
различными элементами приемной апертуры, будут коррелированы между
собой.
Таким
образом,
активная
шумовая
помеха
является
пространственно (междуканально) коррелированной.
Постановщик
АШП
Канал №1
Канал №2
Рис. 5.6. К пояснению междуканальной корреляции АШП
Положим, что коэффициент междуканальной корреляции АШП 𝜌п
равен единице 𝜌п
аддитивной
1 . В тоже время модуль коэффициента корреляции
смеси
АШП
и
внутреннего
шума
|𝜌 |
ввиду
некоррелированности внутренних шумов всегда меньше единице |𝜌|
1 .
Также будем считать, что дисперсии (мощности) АШП на выходах каналов
243
приемных элементов, например, ввиду различия их коэффициентов
усиления, неодинаковы 𝜎п
Рассмотрим
𝜎п .
прохождение
активной
шумовой
помехи
через
устройство нормирования и компенсации. Обратим внимание, что после
нормировки 𝑦п ⁄𝜎п и 𝑦п ⁄𝜎п мощности помеховых колебаний 𝑦пн и 𝑦пн
становятся одинаковыми и равными единице (см. п. 5.1)
𝑀 𝑦пн
𝑀 𝑦п ⁄𝜎п
𝜎п ⁄𝜎п
1
(5.21а)
𝑀 𝑦пн
𝑀 𝑦п ⁄𝜎п
𝜎п ⁄𝜎п
1
(5.21б)
Следовательно, после операции вычитания в круглых скобках
формулы (5.19) «канальные» сигналы можно представить в виде
𝑦п
𝜎п
𝜌п
𝑦п
,
𝜎п
Согласно 5.22 при 𝜌п
𝑦п
𝜎п
𝜌п
𝑦п
𝜎п
(5.22)
1 происходит полная компенсация АШП, так
как в этом случае нормированные напряжения АШП в каналах приема
имеют одинаковые амплитуду и знак. При 𝜌п
1 эти напряжения имеют
1|, то
противоположный знак и согласно (5.22) складываются. Если |𝜌п
происходит частичная междуканальная компенсация коррелированной
АШП, что практически всегда имеет место.
Для |𝜌п |
устройстве
1, определим мощность помехи после её компенсации. В
оптимальной
обработки
(Рис.
5.5)
используются
два
компенсатора, осуществляющих вычитание (5.22). При этом помеха 𝑦п в
𝜌п 𝑦п
первом канале компенсируется путем взвешенного вычитания
помехи 𝑦п из второго канала и наоборот. “Вес” вычитаемого здесь равен
коэффициенту междуканальной корреляции 𝜌п .
Тогда мощность помехи на выходе устройства компенсации равна
𝜎вых
𝑀 𝑦п
𝑀 𝑦пн
𝜌п 𝑦п
1
2𝜌п
𝜌п
Здесь учтено, что 𝑀 𝑦пн
1
2𝜌п 𝑀 𝑦п 𝑦п
𝜌п
𝑀 𝑦пн
244
1 см. 5.21
𝜌п 𝑀 𝑦пн
(5.23)
и 𝑀 𝑦пн 𝑦пн
𝜌п .
Ведем
в
рассмотрение
коэффициент
подавления
помехи
𝐾п
устройством компенсации как отношение мощностей помехи на его входе
и выходе 𝐾п
Учитывая, что мощность помехи на входе после операции
нормирования равна единице (см. 5.23) имеем:
1
𝐾п
1
(5.24)
𝜌п
Аналогично определяется мощность помехи на выходе второго
1
устройства компенсации 𝜎вых
𝜌п и коэффициент подавления (Кп) в
виде (5.24).
Таким образом, для аддитивной смеси внешней коррелированной
помехи
и
внутреннего
шума
с
коэффициентом
междуканальной
корреляции 𝜌 будем иметь
𝐾п
1⁄1
𝜌
Заметим, что в устройстве оптимальной обработки двухэлементной
выборки
(Рис.
5.5)
после
накопления
сигнальных
напряжение делится на постоянный коэффициент
1
составляющих
𝜌 . Поскольку
деление или умножение на постоянный коэффициент не меняет отношения
сигнал/помеха, то этот делитель может быть исключён из обработки.
Если помеха не коррелирована то в (5.19) и (5.20) следует подставить
𝜌
0, и обработка, как и в п. 3.3.1, окажется согласованной. Это значит,
что достаточная статистика и параметр обнаружения равны
𝜉
В
этом
𝑦 𝑥
,
𝜎
𝑦 𝑥
𝜎
случае
𝑥
𝜎
𝑞
принимаемые
или
𝑥
𝜎
(5.25)
ожидаемые
напряжения
нормируются на дисперсии помехи 𝜎 , а сигнальные составляющие
накапливаются. Причем, с меньшим весом учитывается элемент выборки
сигнала, принимаемый на фоне более интенсивной помехи.
Заметим,
компенсации
что
велика.
при
наличии
Например,
коррелированной
для
245
𝜎
𝜎
𝜎и𝑥
помехи
роль
0 значение
параметра обнаружения 𝑞
на выходе устройства обработки согласно
(5.20) составляет 50𝑥 /𝜎 при 𝜌
0,99 и лишь 𝑥 /𝜎 при 𝜌
0. Последнее
значение соответствует согласованной обработке сигнала 𝑥
на фоне
некоррелированной помехи, но имеющей ту же мощность, что и
коррелированная.
5.4.
Показатели качества многоканального обнаружителя
При обнаружении узкополосных высокочастотных сигналов Δ𝑓и ≪
𝑓
выражения для весовой суммы 𝜉 и параметра обнаружения 𝑞 можно
представить через комплексные амплитуды (см. Приложение 3).
𝜉
1
𝑅𝑒
1 |𝜌 |
𝑞
Здесь 𝜌
1
1 |𝜌 |
𝑌
𝜎
|𝑋 |
𝜎
𝑌
𝜌
𝜎
𝑋
𝜎
𝑋∗
𝜎
𝑌
𝜎
𝑌
𝜌
𝜎
𝑋 𝑋∗
2𝑅𝑒 𝜌
𝜎𝜎
𝑋∗
,
𝜎
(5.26а)
(5.26б)
.
|𝑀п 𝑌 𝑌 ∗ ⁄2 𝜎 𝜎 – комплексный коэффициент корреляции
помехи, 𝑌 , 𝑋 – комплексные амплитуды принятой смеси и ожидаемого
сигнала соответственно.
Полученные
соотношения
справедливы
и
при
обработке
двухэлементной выборки, которая соответствует двум мгновенным
значениям или комплексным амплитудам напряжений одноканального
приемника, взятым, например, через период посылки когерентного
зондирования. В этом случае под 𝜌 следует понимать коэффициент
временной (междупериодной) корреляции, имеющий важное значение при
защите от пассивных помех (ПП) (см. подраздел 5.7).
Рассмотренный пример обработки двухэлементной выборки в
учебных целях является наиболее наглядным, хотя двухэлементные ФАР
не используются на практике (иногда в пеленгаторах применяются
двухэлементные интерферометры).
246
Рассмотрим показатели качества многоканального обнаружения. Как
и в разделе 3, под отношением сигнал/помеха по мощности 𝑞 на выходе
устройства оптимальной обработки будем понимать (см. (3.32)) отношение
квадрата
сигнальной
𝜉
составляющей
достаточной
статистики
к
дисперсии 𝜎п её помеховой составляющей
𝜉
𝜎п
𝑞
(5.27)
Определим числитель и знаменатель этого отношения. С этой целью
в (5.7) вместо y сначала подставим сигнал x, а потом помеху n, т.е.
𝜉
𝜎п
𝑀 𝜉п
𝒙 𝝋 𝒙
𝒙 𝒓
𝒙 𝝋 𝑀 𝒏𝒏 𝝋 𝒙
(5.28)
𝒙 𝝋 𝝋𝝋 𝑥
𝒙𝝋 𝒙
𝒙 𝒓
Здесь учтено, что 𝑀 𝜉п
0, 𝑀 𝒏𝒏
𝝋, 𝝋 𝝋
(5.29)
𝑰.
Подставляя (5.28) и (5.29) в (5.27), получим
𝑞
𝒙 𝝋 𝒙
𝒙 𝒓
(5.30)
Таким образом, выражения (5.8) и (5.30) для параметра обнаружения
и отношения сигнал /помеха совпадают.
Для определения показателей качества обнаружения D и F
воспользуемся той же методикой, что и в разделе 3. Определим выражения
для плотностей вероятности 𝑝сп 𝑆 и 𝑝п 𝑆
предположим, что 𝑆
достаточной статистики S. и
𝜉 . Тогда нормированная весовая сумма 𝜉
записывается в виде
𝜉н
где 𝒓н
𝒚 𝒓⁄𝑞
𝒚 𝒓н ,
𝒓⁄𝑞 – нормированный весовой вектор.
Поскольку плотности 𝑝п 𝜉н и 𝑝сп 𝜉н подчиняются гауссовскому
закону, то для их задания достаточно определить соответствующие
математические ожидания и дисперсии. Учитывая, что 𝑀п 𝜉н
запишем
𝑀п 𝜉н
𝑀п 𝑟н 𝒚𝒚 𝒓н
𝒓н 𝝋𝒓н
247
𝒓 𝒙 ⁄𝑞
1
0,
Наличие в принимаемом колебании 𝒚 неслучайного сигнала 𝒙, не
влияет
на
значение
𝑀сп 𝜉н
дисперсии
𝑀п 𝜉н ,
но
изменяет
математическое ожидание, которое теперь равно
𝑀сп 𝜉н
𝑀сп 𝒚 𝒓н
𝒙 𝒓/𝑞
𝑞
Сравнивая полученные соотношения с аналогичными, полученными
в п. 3.3.3, можно утверждать, что и в рассматриваемом случае справедливы
выражения (3.47) для 𝑝п 𝜉н
и 𝑝сп 𝜉н
, их графики (Рис. 3.10) и кривые
обнаружения (Рис. 3.11).Однако параметр обнаружения (отношение сигнал
/помеха), в отличие от (3.29), здесь определяется выражением (5.8).
5.5.
Многоканальные обнаружители аналоговых сигналов с
известными параметрами на фоне коррелированных
гауссовских помех
Обработку
предельный
аналогового
случай
сигнала
обработки
будем
рассматривать
дискретизированного
сигнала
как
при
асимптотическом увеличении числа отсчетов. Поэтому в качестве
исходных будем использовать соотношения (5.7) – (5.9):
𝜉
𝒚 𝒓
𝑦 𝑟; 𝑞
Уравнение 𝝋𝒓
равенства 𝒓
𝒙 𝒓
𝑥 𝑟 ; 𝝋𝒓
𝒙 или
𝜑 𝑟
𝑥
(5.31)
𝒙 получено формальным умножением обеих частей
𝝋 𝒙 на КМ 𝝋 слева.
Для перехода от функций с дискретным временем к непрерывным
при многоканальном (M-канальном) приеме введем двойную индексацию:
𝑦 , 𝑥 , 𝑟 . Нижний индекс относится к номеру приемного (антенного)
канала, а верхний – к номеру временного отсчета в этом канале, а в (5.31)
одинарные суммы заменим двойными. Совершая предельный переход при
Δ𝑡 → 0, для параметров, входящих в 5.31, получим интегральные
представления формул 5.31
248
𝜉
𝒚 𝑡 𝒓 𝑡 𝑑𝑡,
(5.32)
𝑞
𝒙 𝑡 𝒓 𝑡 𝑑𝑡,
(5.33)
𝜑 𝑡, 𝑠 𝒓 𝑠 𝑑𝑠
𝒙 𝑡 .
(5.34)
Здесь 𝜉 – весовой интеграл; 𝑞 – параметр обнаружения (отношение
сигнал/помеха); 𝒓 𝑡
– весовой вектор (весовая векторная функция),
определяемый из интегрально-матричного уравнения (5.34). Отметим, что
в п. 3.3.2. использовалась аналогичная весовая скалярная функция 𝑟 𝑡
2𝑥 𝑡 /𝑁 , которая была введена для согласованной обработки при
одноканальном приеме. В уравнение 5.34 также входит корреляционная
матрица-функция 𝝋 𝑡, 𝑠 размерности 𝑀
𝑀. При нестационарной помехе
она зависит от аргументов t и s порознь, а в случае стационарной помехи
𝝋 𝑡, 𝑠
𝝋 𝑡
𝑠 , т.е. только от их разности.
Структурная схема оптимального обнаружителя, соответствующая
(5.32), приведена Рис. 5.7а.
ПУ
ПУ
а
б
Рис. 5.7. Оптимальные обнаружители аналогового сигнала на фоне
нестационарной коррелированной помехи
В
обнаружителях
на
пространственно-временная
реализации
𝒚 𝑡 .
Она
Рис.
5.7
осуществляется
обработка
предусматривает
принимаемой
компенсацию
пространственно-временное накопление сигнала.
249
оптимальная
векторной
помехи
и
На Рис. 5.7, б показана разновидность обнаружителя, отличающаяся
переходом к нормированной весовой векторной функции 𝒓н 𝑡
нормированному весовому интегралу 𝜉н
Поясним
эти
теоретические
𝒓 𝑡 /𝑞 и
𝜉 ⁄𝑞 .
результаты
двумя
конкретными
примерами, разъясняющими разницу двух ситуаций: согласованная
обработка на фоне некоррелированной помехи (Пример 1) и оптимальная
обработка на фоне коррелированной помехи (Пример 2).
Пример
1.
Внешняя
коррелированная
помеха
отсутствует.
Рассмотрим пример двухканальной (М = 2) обработки сигнала 𝒙 𝑡
‖𝑥 𝑡 𝑥 𝑡 ‖ на фоне стационарного внутреннего белого шума.
Определим весовой вектор r(t) из интегрально-матричного уравнения
(5.34). Для этого корреляционную матрицу-функцию 𝝋 𝑡, 𝑠 представим в
виде
𝝋 𝑡, 𝑠
где 𝑵
𝝋 𝑡
𝑁
0
0
𝑁
1
𝛿 𝑡
2
𝑠
𝑠
𝑁
0
0
𝑁
1
𝛿 𝑡
2
𝑠 𝑵
(5.35)
– корреляционная матрица спектральных плотностей
мощности белого шума в каналах приема.
Подставим (5.35) в (5.34)
1
𝑁
2
𝛿 𝑡
𝑠 𝒓 𝑠 𝑑𝑠
умножим обе части этого равенства на 𝑵
𝒙 𝑡 ,
1⁄𝑁
0
0
1⁄𝑁
слева и
воспользуемся фильтрующим свойством дельта-функции. Тогда для
весового вектора получим
𝒓 𝑡
𝑟 𝑡
𝑟 𝑡
2𝑥 𝑡 ⁄𝑁
2𝑥 𝑡 ⁄𝑁
2𝑵 𝒙 𝑡
(5.36)
В этом случае весовой интеграл (5.32), являющийся достаточной
статистикой, принимает вид
250
𝜉
2
𝑁
𝑦 𝑡 𝑥 𝑡 𝑑𝑡
2
𝑁
𝑦 𝑡 𝑥 𝑡 𝑑𝑡
(5.37)
2𝑥 𝑡
𝑁
𝑦 𝑡
2𝑥 𝑡
𝑑𝑡
𝑁
𝑦 𝑡
Согласованная обработка здесь предусматривает нормирование
принимаемых (Рис. 5.8, а) или ожидаемых (Рис. 5.8, б) колебаний к
спектральной
плотности
мощности
шума,
а
также
временное
и
пространственное (междуканальное) накопление сигнала.
Параметр двухканального обнаружения q2 согласно (5.33) и (5.36)
равен сумме этих параметров при одноканальном обнаружении
𝑞
Здесь Э
2Э ⁄𝑁
2Э ⁄𝑁
𝑞
𝑞 .
𝑥 𝑡 𝑑𝑡 – энергия сигнала в i- м (i = 1, 2) канале.
y1(t)
2/N01
x1(t)
∫
ξ
∑
y2(t)
к ПУ
∫
2/N02
нормирование
x2(t)
временное пространственное
накопление
а
y1(t)
2x1(t)/N01
∫
∑
ξ
к ПУ
y2(t)
2x2(t)/N02
б
Рис. 5.8. Устройство согласованной обработки при двухканальном приеме
Пример 2. Воздействует внешняя коррелированная, например, АШП
со спектральной плотностью мощности Nп и корреляционной матрицейфункцией вида
251
𝝋 𝑡, 𝑠
где 𝑁∑
𝑁∑
1
𝛿 𝑡
2
𝑁
𝑠 𝝋,
𝜌 𝑁∑ 𝑁∑
𝝋
,
𝜌 𝑁∑ 𝑁∑
𝑁п
(5.38)
𝑁∑
– суммарная спектральная плотность мощности
внутреннего шума и внешней помехи в i-ом канале, 𝜌 – коэффициент
междуканальной корреляции помехи. Предполагается, что задержка по
огибающей помехи между элементами приема пренебрежимо мала
(узкополосная ситуация см. Приложение 6).
Подставляя (5.38) в интегрально-матричное уравнение (5.34) и решая
его относительно весового вектора r(t), получим
𝒓 𝑡
2𝛗 𝒙 𝑡
1/𝑁∑
1
𝛗
1
𝜌/ 𝑁∑ 𝑁∑
(5.39)
.
𝜌
𝜌/ 𝑁∑ 𝑁∑
1/𝑁∑
Весовой интеграл (5.32) и параметр обнаружения (5.33) с учетом
(5.39) принимают вид
𝜉
2
1
𝑦
𝜌
н
𝑡
𝜌𝑦
𝑡 𝑥
н
н
𝑦
𝑡 𝑑𝑡
н
𝑡
𝜌𝑦
н
𝑡 𝑥
н
𝑡 𝑑𝑡 ,
(5.40)
𝑞
где
𝑦н 𝑡
2
1
𝜌
𝑦 𝑡 / 𝑁∑ , 𝑥 н
𝑥
н
𝑡
𝑥
н
𝑡
𝑥 𝑡 ⁄ 𝑁∑
2𝜌𝑥
-
н
𝑡 𝑥
н
𝑡 𝑑𝑡 .
нормированные
к
суммарной
спектральной плотности шумов входная реализация и ожидаемый сигнал
соответственно.
Схема устройства оптимальной обработки для этого примера
показана на Рис. 5.9. В этом устройстве, как и в устройстве Рис. 5.5, в
отличие от устройства согласованной обработки Рис. 5.8 предусмотрена,
междуканальная
компенсация
внешней
коррелированной
помехи.
Временное накопление сигнала может быть осуществлено как с помощью
252
двух интеграторов (Рис. 5.9), так и одним интегратором по аналогии с Рис.
5.8б. Из схемы на Рис. 5.9 также может быть исключен последний
умножитель, как элемент, одинаково влияющий на сигнал и на помеху.
1
𝑁∑1
x1н(t)
y1(t)
∑
S
-ρ
∑
y2(t)
1
2
∑
1
𝜌2
S
ξ
x1н(t)
𝑁∑2
Нормирование
Временное
накопление
Компенсация
Пространственное
накопление
Рис. 5.9. Устройство оптимальной обработки при двухканальном приеме
В заключение отметим, что соотношения (5.32) – (5.34) имеют
достаточно общий характер, так как справедливы при многоканальном и
одноканальном
приеме,
при
нестационарных
и
стационарных,
коррелированных и некоррелированных помехах.
Так при одноканальном приеме когерентной М-элементной пачки
радиоимпульсов на фоне пассивной помехи принцип формирования вектора
входных воздействий y(t) показан на Рис. 5.10.
y (t )
Вход
t
Задержка
на T
y (t T )
t T
Задержка
на T
y ( t 2T )
t 2T
Рис. 5.10. Принцип формирования вектора y(t) при одноканальном приеме
когерентной пачки радиоимпульсов на фоне пассивной помехи (М = 3)
Здесь компоненты вектора 𝒚
‖𝑦 𝑡
𝑖𝑇 ‖
формируют входное
воздействие М-элементной пачки импульсов, отраженных от пассивных
253
помех в смеси с собственным шумом (оптимальная обработка в этой
ситуации будет подробно рассмотрена в подразделе 5.7.).
При
многоканальном
приеме
такой
когерентной
пачки
радиоимпульсов на фоне комбинированных помех (АШП + ПП) задержки
принимаемого колебания для формирования вектора 𝒚 𝑡 , показанные на
рис. 5.10, теоретически должны быть реализованы в каждом из
приемных
каналов.
Заметим,
что
если
на
Рис.
5.10
Μ
заменить
последовательность импульсов на излучатели, а постоянные периоды
повторения импульсов ( Т) на шаг эквидистантной АР (d), то эта схема
окажется идентичной с показанной на Рис. 5.1. В этом усматривается
формальное сходство пространственной обработки на фоне АШП и
частотно-временной обработки на фоне ПП.
5.6.
Достаточные статистики при многоканальном
обнаружении узкополосных высокочастотных сигналов с
известными и случайными параметрами
Соотношения (5.7) и (5.32) для весовой суммы и весового интеграла
могут использоваться при обнаружении сигналов, имеющих произвольную
ширину спектра ∆𝑓и , даже соизмеримую с центральной частотой f0. Однако
наибольшее значение имеет рассмотрение узкополосных
∆𝑓 ≪ 𝑓
высокочастотных сигналов. Как указывалось ранее (см. Приложение 3),
при описании узкополосных колебаний 𝑦 𝑡
𝑅𝑒 𝑌 𝑡 exp 𝑗2𝜋𝑓 𝑡
широко
пользуются понятием комплексной амплитуды 𝑌 𝑡 . По аналогии с п. 3.3.4
получим выражения для достаточных статистик при многоканальном
приеме на фоне коррелированных помех. Для этого воспользуемся Kмерным
𝒀
𝑅𝑒 𝒀
распределением
комплексного
случайного
вектора
𝑗𝐼𝑚 𝒀 (см. Приложение 2). Оно соответствует 2К - мерному
совместному распределению действительных векторов 𝑅𝑒 𝒀 и 𝐼𝑚 𝒀
в
условиях отсутствия и наличия в смеси Y известного сигнала X. Плотности
254
распределений, входящие в отношение правдоподобия представляются
следующим образом:
𝑝п 𝒀
𝑝п 𝒀
2𝜋
|𝚽| 𝑒𝑥𝑝
2𝜋
|𝚽| 𝑒𝑥𝑝
1
𝒀
2
1 ∗
𝒀 𝚽
2
𝒀,
∗
𝒀
𝑿
𝚽
𝑿 ,
𝑀п 𝒀𝒀∗ ⁄2 – эрмитовая комплексная корреляционная матрица
где 𝚽
помехи.
Здесь и далее КМ помехи будем обозначать большой буквой 𝚽,
которая в отличие от ранее введенной матрицы 𝝋 соответствует
корреляции комплексных огибающих 𝑋(t) и 𝑌(t), а не мгновенных значений
x(t) и y(t).
В дальнейшем для элементов матриц, связанных с комплексными
огибающими, будут приняты следующие обозначения: 𝚽
Φ
,
.
Далее воспользуемся соотношениями (5.32)–(5.34), и формулой,
полученной в Приложении 3.
𝑎 𝑡 𝑏 𝑡 𝑑𝑡
𝑅𝑒
Для элементов матрицы 𝚽
матрицы 𝝋 , т.е 𝚽
𝜓
1
2
𝐴 𝑡 𝐵∗ 𝑡 𝑑𝑡
сохраним те же обозначения, что и для
,
. Тогда выражение (5.32) для весового
интеграла можно представить в виде
𝜉
𝑅𝑒 𝑍 ,
𝑍
1
2
𝒀 𝑡 𝑹∗ 𝑡 𝑑𝑡
где 𝑍– комплексный весовой интеграл; 𝒀 𝑡
(5.41)
‖𝑌 𝑡 𝑌 𝑡 … 𝑌 𝑡 ‖ вектор
– столбец комплексных амплитуд колебаний, принимаемых M каналами;
𝑹 𝑡
‖𝑅 𝑡 𝑅 𝑡 … 𝑅
𝑡 ‖ – М-мерный комплексный весовой вектор
(вектор – столбец комплексных амплитуд Ri(t) канальных весовых
функций 𝒓 𝑡 ).
255
Вектор
R(t)
определяется
решением
интегрально-матричного
уравнения, рассмотренного в Приложении 8. Это уравнение имеет вид
1
2
𝑿 𝑡
𝚽 𝑡, 𝑠 𝑹 𝑠 𝑑𝑠
(5.42)
где 𝑿 𝑡 – вектор-столбец комплексных амплитуд ожидаемого сигнала;
Запишем комплексную матрицу амплитуд помехи в общем виде
𝑀п 𝒀 𝑡 𝒀∗ 𝑠 /2
𝚽 𝑡, 𝑠
(5.43)
– корреляционная матрица-функция комплексных амплитуд помехи
(комплексная корреляционная матрица), связанная с корреляционной
матрицей-функцией 𝝋 𝑡, 𝑠 мгновенных значений соотношением
𝝋 𝑡, 𝑠
𝑅𝑒 𝚽 𝑡, 𝑠 𝑒
В приложении 8 также получен параметр обнаружения, который
представляется в виде
𝑞
1
2
𝑿 𝑡 𝑹∗ 𝑡 𝑑𝑡
(5.44)
Воспользовавшись методикой, изложенной в п. 3.3.1, можно
показать,
что
при
обнаружении
сигнала
со
случайными
неинформативными параметрами на фоне коррелированной помехи
достаточной статистикой здесь также является модуль комплексного
весового интеграла
𝑍
1
2
𝒀 𝑡 𝒓∗ 𝑡 𝑑𝑡
(5.45)
𝑍 /𝑞..
или его нормированное значение 𝑍н
При этом сохраняют свой вид кривые обнаружения (рис. 3.16), но
параметр обнаружения рассчитывается по формуле (5.44).
Здесь
уместно
напомнить
об
инвариантности
вычисления
корреляционного весового интеграла на любой частоте, включая видео.
256
5.7.
Обработка аналогового сигнала в РЛС с антенной
решеткой.
Для этого важного случая найдем алгоритмы согласованной и
оптимальной обработки сигналов в РЛС с антенной решеткой, в которой
запаздывание по огибающей принимаемых колебаний пренебрежимо мало
по сравнению с эквивалентной длительностью имульса 𝜏иэ ≫ 𝑇А (см.
раздел 4 и Приложение 6).
Для простоты будем рассматривать линейную эквидистантную
M-
элементную линейную антенную решетку, у которой идентичные и
ненаправленные
элементы
расположены
в
линию
на
одинаковом
расстоянии d друг от друга (рис. 5.11), что не снижает общности
рассмотрения и результатов.
5.7.1. Согласованная обработка сигнала в РЛС с антенной
решеткой
Сначала рассмотрим согласованную обработку аналогового сигнала
d sinθц
θц
1
направление на
цель θц
2
со
d
случайными
параметрами
на
неинформативными
фоне
стационарной
некоррелированной помехи (внутреннего
(i-1)d sinθц
i
(M-1)d sinθц
фазовый фронт
волны
ось АР
M
Рис. 5.11. Линейная
эквидистантная антенная
решетка
Вектор
ожидаемого
комплексных
амплитуд.
пространственной
и
белого шума). Для этого воспользуемся
соотношениями (5.42) – (5.44), в которые
введем информативный параметр сигнала
𝛼ц , связанный с угловым направлением в
пространстве 𝜃ц .
𝐱 t, 𝛼ц
сигнала
𝐗 t, 𝛼ц ,
временной
описывается
который
обработки
при
вектором
разделении
представляется
в
виде
произведения
𝑿 𝑡, 𝛼ц
𝑋 𝑡 𝑿 𝛼ц ,
257
(5.46)
где
X (t ) скалярная
функция (комплексная амплитуда),
описывающая
временную структуру сигнала общую для всех элементов АР;
𝑿 𝛼ц
1𝑒
ц
…𝑒
(5.47)
ц
– М-мерный вектор фазового распределения сигнала на апертуре АР при
падении плоской волны;
𝛼ц
Δ𝜑ц
2𝜋𝑑
𝑠𝑖𝑛𝜃ц
𝜆
(5.48)
– разность фаз сигналов в соседних элементах АР, зависящая от углового
направления 𝜃ц (Рис. 5.11) на цель. В дальнейшем пространственный
информативный параметр будем обозначать 𝛼ц .
Для
данного
случая
корреляционная
матрица-функция
(5.43)
внутреннего белого шума является вещественной и диагональной
N 01
0
Φ(t , s) Φ(t s)
0
0 0
N 02 0
(t s).
0 N 0М
(5.49)
Будем полагать, что спектральная плотность мощности внутреннего
шума во всех приемных каналах одинакова N 0 i N 0 , и поэтому запишем
(5.49) в виде
Φ (t s ) N 0 Ι (t s ),
где
Ι
(5.50)
– единичная диагональная матрица размерности
M M
.
После подстановки (5.46) и (5.49) в (5.42) интегрально-матричное
уравнение принимает вид
Для
𝑁
2
𝛿 𝑡
решения
этого
𝑠 𝑅 𝑠, 𝛼ц 𝑑𝑠
уравнения
𝑋 𝑡 𝑿 𝛼ц
воспользуемся
фильтрующим
свойством дельта-функции и тогда определим весовой вектор следующим
образом:
258
(t , ) R (t ) R
( ) 2 X (t ) X
( ),
R
ц
ц
ц
N0
( ) X
( ).
R (t ) 2 X (t ) / N , R
0
ц
(5.51)
ц
Подставляя (5.51) в (5.45), находим выражение для модуля
комплексного весового интеграла
𝑍
𝑌∑ 𝑡
𝒀 𝑡 𝑿∗ 𝛼ц
1
𝑁
𝑌∑ 𝑡 𝑋 ∗ 𝑡 𝑑𝑡
𝑌 𝑡 𝑋 ∗ 𝛼ц
(5.52 а)
𝑌 𝑡 𝑒
,
(5.52б)
где Y (t ) – комплексная амплитуда выходного напряжения устройства
пространственной обработки, 𝑌 𝑡 – комплексная амплитуда сигнала в
i - ом канале АР.
Схема
устройства
согласованной
пространственно-временной
обработки, построенная в соответствии с (5.52), приведена на Рис. 5.12. На
этом рисунке показано разделение пространственно-временной обработки
на согласованную пространственную (антенную) и согласованную
временную, в соответствии с соотношениями (5.52, б) и (5.52, а).
ФАР
Согласованная
пространственная обработка
0
Согласованная временная
обработка
-φ1
1
M‐1
-φ2
..
.
∑
-φM
Пространственное
накопление
𝑌∑ 𝑡
СФ
Д
𝑍
Временное
накопление
Нормирование
1/N0
Рис. 5.12. Устройство согласованной обработки в РЛС с АР
259
На
Рис. 5.13. Цель
в ДН АР
этапе
пространственной
(вычисления
𝑌 𝑡 )
пространству
(между
сигнал
обработки
накапливается
каналами).
Для
по
этого
фазовращатели вводятся фазовые сдвиги 𝜑
в
𝑖
1 Δ𝜑ц , с противоположным знаком относительно фаз
вектора 𝑿∗ 𝛼ц
1𝑒
ц
…𝑒
ц
. При этом
максимум диаграммы направленности антенной решетки ориентируется в
ожидаемом направлении
прихода сигнала (Рис. 5.13). При приеме
сигнала с этого направления в фазовращателях компенсируются взаимные
фазовые сдвиги сигналов, принимаемых отдельными элементами АР.
Таким образом сигналы “выравниваются” по фазе, а затем суммируются.
Эту процедуру можно рассматривать как поворот плоскости решетки на
угол 𝜃 для «согласования» с падающей плоской волной.
Действительно, положим в (5.52,б) 𝑿 𝛼ц
1𝑒
…𝑒
.
Тогда для заданного угла 𝜃 получим:
𝑋
𝛼ц 𝑋 ∗ 𝛼ц
1∙1
𝑒
∙𝑒
⋯
𝑒
∙𝑒
𝑀
(5.53)
Заметим, что точно такой же результат можно получить когерентно
накапливая импульсы M – элементной пачки.
Такое междуканальное сложение (накопление) сигналов в фазе
позволяет повысить отношение сигнал/шум, поскольку некоррелированные
шумовые колебания суммируются с произвольными фазами, т.е.,
складываются по мощности некогерентно, а полезные сигналы канала
когерентно.
По существу, алгоритм (5.52б) требует реализации фазированной
антенной
решетки
(Рис.
5.12),
способной
обеспечить
быстрое
«согласование» (сканирование) в заданные угловые направления.
На этапе согласованной временной обработки сигнал накапливается
во времени. При этом модуль комплексного весового интеграла (5.52а)
может быть вычислен с помощью согласованного фильтра и детектора
260
(Рис.
5.12),
либо
коррелятора
с
квадратурными
каналами,
либо
корреляционно-фильтрового обнаружителя, которые были рассмотрены в
разделе 3.
Отношение сигнал/шум 𝑞 на выходе линейной части устройства
согласованной обработки (Рис. 5.11) определим из (5.44) с учетом (5.52 б)
в виде
(t , ) X
(t , ) 1
q2 X
ц
ц
N0
( ) X
( ) –
M X
ц
где
𝑞
2Э
𝑁;Э
𝑋 𝑡
X (t )
2
dt 2 MЭ 0 / N 0 Mq 02 .
(5.54)
количество
элементов
АР,
𝑑𝑡 – энергия сигнала, принимаемого одним
элементом АР.
Соотношение (5.54) показывает, что пространственное накопление
позволяет повысить отношение сигнал/шум по мощности в M раз.
При
Μ
- канальном приеме когерентной пачки из N радиоимпульсов
𝑁Эи , 𝑞
имеем Э
2𝑀𝑁Эи ⁄𝑁 , где Эи – энергия одного импульса,
принимаемого одним элементом АР.
Таким
образом,
пространственное
и
временное
накопление
позволяют повысить отношение сигнал/шум по мощности в МN раз по
сравнению с ОСШ в одном элементе АР при приеме одного импульса
пачки.
Возможность
когерентного
пространственного
накопления
полезного сигнала с ожидаемого направления 𝜃 не единственная причина
широкого применения ФАР в РЛС. Как было показано в разделе 2, при
помощи ФАР можно реализовать гибкий закон обзора пространства и
многоэтапный способ обнаружение, что также способствует повышению
темпа выдачи информации.
5.7.2. Оптимальная обработка сигнала на фоне активной
шумовой помехи в РЛС с антенной решеткой
261
Пусть внешняя пространственно коррелированная активная шумовая
помеха создается
mM
источниками (Рис. 5.14) (количество источников
АШП меньше числа каналов АР). По аналогии с угловым параметром 𝛼ц
для помехи введем пространственный информационный параметр 𝜈п ,
связанный с направлением на помеху 𝜃п .
Комплексная КМ помехи (5.43) (внешняя АШП + внутренний белый
шум) представляется в виде суммы комплексной пространственной
корреляционной матрицы
m
( ) h X
Φ
j ( пj )X ( пj )
п
(5.55)
j 1
и корреляционной функции белого шума
Φ(t s) N 0 (t s ).
(5.56)
а, следовательно, суммарную КМ можно записать в виде
(t , s ) Ф
(t s ) Ф
( ) N (t s ).
Ф
п
0
В (5.55) обозначено: 𝜈п
Δ𝜑п
𝑑𝑠𝑖𝑛𝜃
(5.57)
– разность фаз между
излучателями АР при приходе помехи с j – го углового направления, ℎ
𝑁п ⁄𝑁 – отношение спектральных плотностей мощности АШП от j - го
источника и внутреннего белого шума (относительная интенсивность
АШП), а 𝑋 𝑣п
1𝑒
п
…𝑒
– M-мерный вектор фазового
п
распределения j- й помехи на апертуре АР.
Пространственная
КМ
характеризует
пространственную корреляцию помехи и при
наличии внешней АШП является недиагональной.
Корреляционная функция белого шума в каналах
Рис. 5.14. Цель и
постановщики
помех
свидетельствует
о
некоррелированности
его
мгновенных значений, взятых в любые два (сколь
угодно близких) момента времени t и s (t ≠ s).
262
Найдем выражение для модуля весового интеграла, определяющего
достаточную предпороговую статистику и весовой вектор из интегральноматричного уравнения (5.34). Подставим (5.55) и (5.57) в (5.42) и придем к
уравнению
N0
( s ) ds X (t ) X
( ) ,
Ф ( п ) R ( ц ) (t s ) R
ц
2
В силу фильтрующего свойства дельта-функции получим
1 ( )X
( )[2 X (t ) / N ],
R(t , ц ) R( ц , п ) R (t ) Ф
п
ц
0
(5.58)
Это выражение разделяет обработку на пространственную и
врменную
1 ( ) X
( )
R ( ц , п ) Φ
ц
(5.59)
- весовой вектор пространственной обработки
R (t ) 2 X (t ) / N 0 .
(5.60)
- весовой вектор временной обработки
С учетом (5.58) – (5.60) выражение для модуля комплексного
весового интеграла (3.43) представим в виде
1
Y (t ) X (t ) dt ,
N0
(5.61)
где
Y (t ) Y T (t )R (ц ) Yi (t ) Ri (ц ) e jпi
(5.62)
i 1
или в матричной записи
1 ( ) X
( )] .
Y ( t ) Y ( t )[ Ф
п
ц
Здесь
|𝑅 |, 𝜑
–
модуль
и
аргумент
(5.63)
i
-
й
составляющей
пространственного весового вектора.
Схема устройства оптимальной обработки сигнала на фоне АШП в
РЛС с АР, построенная в соответствии с (5.59) и (5.60), показана на Рис.
5.15.
263
Пространственно-временная обработка в этом случае разделяется
на
оптимальную
пространственную
и
согласованную
временную
обработки. Вариант схемы, представленный на Рис. 5.15, предусматривает
проведение оптимальной пространственной обработки с подавлением
АШП непосредственно в антенной решетке. В общем случае на выходах
антенных элементов должны быть установлены не только фазовращатели,
но
и
аттенюаторы,
которые
совместно
реализуют
требуемое
амплитудно-фазовое распределение (АФР) на апертуре ФАР.
Оптимальная
пространственная обработка
Согласованная
временная обработка
Д
СФ
.
.
.
Временное
накопление сигнала
Нормирование
Рис. 5.15. Устройство оптимальной обработки сигнала на фоне АШП в
РЛС с АР
При выполнении операции (5.62) принимаемое каждым элементом
АР колебание в фазовращателе получает фазовый сдвиг
𝜑
(а не 𝜑 как
при согласованной обработке на Рис. 5.12) и в аттенюаторе изменяет свою
амплитуду в |𝑅 | раз. После этого колебания суммируются. В результате
активная шумовая помеха компенсируется, а сигнал накапливается по
пространству (между каналами).
За счет указанной компенсации и
перестройки амплитудно-фазового распределения (АФР) в диаграмме
направленности АР создаются “провалы” в направлениях прихода помех,
как показано на (Рис. 5.16). При этом предполагается, что в угловых
направлениях источника сигнала и помех имеются различия.
264
Наряду
с
единой
соответствии
с
(5.63),
весовой
пространственной
возможно
поэтапное
обработкой
проведение
в
операций
компенсации АШП и пространственного накопления сигнала (Рис. 5.17).
При умножении вектора Y (t ) на матрицу [Ф 1 ( п )] , обратную и
сопряженную
пространственной
КМ
( ) ,
Ф
п
активная
помеха
компенсируется. Последующее умножение результата первого этапа
( t )[ Ф
1 ( )]
Y
п
на
вектор
фазового
распределения
сигнала
X ( ц )
соответствует пространственному накоплению сигнала на фоне остатков
от компенсации помехи.
сигнал
помеха
помеха
ц
п2
п1
Рис. 5.16. Формирование провалов в ДН устройства оптимальной
пространственной обработки в направлениях на источники помех
Y ( t )
×
×
1(п )
Ф
Y (t )
X (ц )
Рис. 5.17. Устройство пространственной обработки с последовательным
проведением операций компенсации и накопления
5.7.3. Пример оптимальной двухканальной обработки на фоне
активной шумовой помехи
Приведем конкретный пример реализации алгоритма компенсации
помехи и накопления полезного сигнала. Синтезируем устройство
пространственной обработки сигнала на фоне АШП, создаваемой одним
источником, для антенной решетки, имеющей два идентичных и
ненаправленных приемных элемента (М = 2), как показано на Рис. 5.18.
265
Заданы векторы фазового распределения сигнала X ( ) и помехи X ( )
, а также пространственная КМ помехи (5.55):
𝑋 𝛼
∆
1𝑒
∆𝜑ц
ц
𝑋 𝜈
,
2𝜋𝑑
sin 𝜃ц ,
𝜆
∆
1𝑒
∆𝜑п
(5.64)
,
а
2𝜋𝑑
sin 𝜃п ,
𝜆
( ) Ι hX
( ) X
( )
Ф
п
п
п
(1 h )
1
h j п
e
h 1
h
e j п
1
h 1
(1 h )
1
1
(5.65)
.
Здесь комплексный КК равен
h jп
e
h 1
(5.66)
– комплексный коэффициент пространственной (междуканальной)
корреляции
помехи,
модуль
которого
h /(h 1)
зависит
от
относительной интенсивности АШП (h). Напомним, что внешняя АШП
коррелирована между каналами приема, внутренний шум не коррелирован,
а аргумент arg зависит от разности фаз АШП в каналах приема.
После обращения (5.65) имеем
1
1
1 1
Ф
.
1 h 1 2 1
(5.67)
Подставляя выражения (5.64) и (5.67) в формулу (5.61), учитывая, что
1
1
1
и нормируя Y (t ) к N 0 , получим нормированный
N0 (1 h) N0 Nп N
выходной эффект устройства пространственной обработки в виде
Yн (t ) Y (t ) / N 0 ,
𝑌н 𝑡
т.е.
1
1 |𝜌 |
прозрачный текст для выравнивания
𝜌𝑌 н 𝑡 𝑒 ∆
𝜌∗ 𝑌 н 𝑡
𝑌н 𝑡
𝑌н 𝑡
266
(5.68)
где Yiн ( t ) Y i / N .
В
соответствии
пространственной
с
(5.68)
обработки
с
структурная
поэтапным
схема
проведением
устройства
операций
компенсации АШП и междуканального накопления сигнала представлена
на Рис. 5.18. Заметим, что эта схема структурно повторяет схему
оптимальной обработки двухэлементной выборки, показанной на Рис. 5.5.
В этом устройстве принимаемые колебания Yi (t ) (i 1, 2) нормируются
к спектральной плотности мощности помехи (АШП + внутренний шум) N
. Затем в каждом из каналов активная шумовая помеха компенсируется.
Схема компенсатора помехи выделена штриховой линией на Рис. 5.18а. На
рисунке Рис. 5.18б показано формирование веса для компенсации помехи.
1/N∑
𝑌1 𝑡
1
𝑌1н 𝑡
∑
𝜌
𝜌
𝑌2 𝑡
1
∑
∗
𝑌2н 𝑡
∑
1/N∑
| 𝜌| 2
𝑌∑н 𝑡
ФВ
Δα ц
а)
ℎ
1
𝑌2н 𝑡
ℎ
𝜌𝑌2н 𝑡
ФВ
(Δφ п)
б)
Рис. 5.18. Устройство оптимальной пространственной обработки в
двухэлементной АР
Выделенная из схемы Рис. 5.18а структура компенсатора помехи
показана на Рис. 5.19.
При умножении принимаемого колебания, в частности Y2н (t ) на
коэффициент пространственной корреляции помехи реализуется
противофазность помеховых колебаний на выходе сумматора первого
(верхнего) канала, так как их мощности после нормировки равны. После
267
компенсации (вычитания) помеховых колебаний полезный сигнал с
помощью фазовращателя выравнивается по фазе для заданного углового
направления 𝛼 и когерентно накапливается.
Рис. 5.19. Компенсатор помехи
Компенсация
помех
на
практике
производится
как
при
использовании АР, так и других, например зеркальных, антенн. При этом
для
компенсации
компенсационной
помех
остронаправленная
слабонаправленной
(Рис.
антенна
5.20).
дополняется
Последняя
(2)
перекрывает боковые лепестки ДН (1) остронаправленной антенны. На
практике это перекрытие должно быть более 3дБ, а провал в области
главного максимума – 1 не менее 20дБ.
1
2
𝛼
Рис. 5.20. ДН остронаправленной (1) и компенсационной
слабонаправленной (2) антенн
5.8.
Оптимальная обработка в антенной решетке с
выделенным каналом согласованной обработки.
5.8.1. Структурная схема оптимальной обработки
268
Рассмотрим еще одну разновидность устройства пространственной
обработки,
основанную
на
представлении
пространственной
корреляционной матрицы помехи в виде суммы матриц. Сначала будем
полагать, что АШП создается одним источником.
Тогда пространственная корреляционная матрица
( ) Ι h X
( ) X
( )
Ф
п
п
имеет вид 𝑨
(5.69)
𝛽𝒃𝒃∗ (𝑨 – матрица, 𝒃 – вектор-столбец, 𝛽 - скаляр) и
обращается по правилу Дуайра-Уо, известному из теории матриц
1 1
b b ) 1 A
1 A b b A
(A
.
1b
1 b A
(5.70)
1 (v) получим в виде
Используя (5.70), матрицу Ф
1 ( ) Ι h X ( п ) X ( п ) Ι Mh X
( ) X
( ).
Ф
п
п
п
( ) X
( )
1 hX
1
Mh
п
п
(5.71)
Здесь учтено, что АР состоит их M=идентичных и ненаправленных
элементов, а, следовательно, X ( п ) X ( п ) M (см. 5.53), а также то, что
суммарная интенсивность помехи в M раз выше, чем в одном канале (h).
Подставим (5.71) в (5.63) и запишем выражение для комплексной
огибающей на выходе устройства оптимальной обработки в АР.
(t ) X
( ) Y
(t ) X
( )
Y (t ) Y
ц
п
( ) X
( )
Mh X
п
ц
.
1 Mh
M
В 5.72 весовой множитель 𝑀ℎ/ 1
𝑀ℎ
(5.72)
1, так как 𝑀ℎ ≫ 1, что
практически выполняется всегда.
Введем
в
рассмотрение
нормированный
коэффициент
пространственной корреляции (КПК) помехи и сигнала.
𝜌сп 𝜈п , 𝛼ц
𝜌сп 𝜃п , 𝜃ц
𝐗 𝜈п 𝐗 ∗ 𝛼ц /𝑀
269
(5.73)
сигнал
Для заданных значений 𝜃п и 𝜃ц
сигнал
θп
θц
величина 𝜌сп 𝜃п , 𝜃ц
𝜌сп 𝜃п , 𝜃ц
степень
характеризует
различия
угловых
направлений на источники помехи и
сигнала.
Модуль
КПК
соответствует
Рис. 5.21. К определению
модуля коэффициента
пространственной корреляции
сигнала и помехи
значению
нормированной
направленности
ориентирована
сп ( , )
диаграммы
АР.
Эта
максимумом
АР
на
источник сигнала (Рис. 5.21), а в направлении на источник помехи –
боковым
лепестком.
Аргумент
КПК
определяется
разностью
фаз
принимаемых колебаний помехи и сигнала. С учетом введенных
обозначений при 𝑘
𝑌 𝑡
1 представим (5.72) в виде
𝐘 𝑡 𝐗 ∗ 𝛼ц
𝜌сп 𝜈п , 𝛼ц 𝐘 𝑡 𝐗 ∗ 𝜈п
(5.74)
Это же соотношение можно получить и другим способом.
Умножение (5.71) справа на
( )
X
ц
позволяет непосредственно получить
выражение для весового вектора 𝑅 𝛼
𝑅 𝛼ц
𝐗 𝛼ц
𝚽
𝜈 𝐗 𝛼 в виде
𝜌∗ сп 𝜈п , 𝛼ц 𝐗 𝜈п
270
(5.75)
сигнал
помеха
канал
согласованной ∗
𝑿 𝛼ц
обработки
(основной канал)
𝑿∗ 𝑣п
компенсационный
(дополнительный)
канал
𝑘𝜌сп 𝑣п , 𝛼ц
∑
СФ
Д
Рис. 5.22. Устройство оптимальной обработки сигнала на фоне АШП
Схема устройства обработки, построенная в соответствии с (5.61) и
(5.74), показана на Рис. 5.22. Векторно-матричный перемножитель
(t ) X
( )
Y
ц
представляет собой набор фазовращателей и сумматор. В
фазовращатели вводятся фазовые сдвиги, задаваемые вектором
X ( ц ) ,
и
максимум ДН АР (первый луч) устанавливается в ожидаемое направление
прихода сигнала. Операция
(t ) X
( )
Y
ц
соответствует согласованной
пространственной обработке сигнала, рассмотренной в п. 5.6.1.
Таким образом, канал согласованной обработки, оптимальный при
отсутствии коррелированных помех, здесь выделен в самостоятельную
ветвь. Его называют основным каналом.
Векторно-матричный перемножитель Y (t ) X ( п ) дополнительного
(компенсационного) канала также состоит из набора фазовращателей и
271
сумматора. При этом в фазовращатели вводятся сдвиги, определяемые
вектором X ( п ) , и второй луч АР ориентируется в направлении на
источник активной шумовой помехи (Рис. 5.22). При воздействии помехи
с
этого
направления
компенсационные
в
дополнительном
колебания
помехи,
канале
которые
с
формируются
𝜌сп 𝜈п , 𝛼ц
весом
вычитаются из помеховых колебаний, принятых, например, боковым
лепестком ДН основного канала. В результате помеха компенсируется.
При отсутствии внешней АШП дополнительный канал “закрыт” и
устройство оптимальной обработки Рис. 5.22 функционирует в режиме
согласованной обработки.
5.8.2. Результирующая ДН оптимальной обработки
Рассмотрим нормированную оптимальную (результирующую) ДН
𝐹опт 𝛼
𝐗 𝛼 𝚽
𝜈п 𝐗 αц
∗
/𝑀
устройства Рис. 5.22 как функцию обобщенного угла 𝛼ц
𝑀𝑑 sin 𝜃ц /𝜆
выраженную в долях полуширины ДН вида |sin 𝑥 /𝑥| по нулевому уровню.
Для того, чтобы найти результирующую ДН, вместо Y (t ) подставим X (~ )
и разделим обе части равенства на
M
Fопт (~ц ) (~ц , ц ) k (~ц , п ) сп ( п , ц ) F0 (~ц ) Fк (~ц ) ,
где (~ц , ц ) X (~ц ) X ( ц ) / M
диаграмма
направленности
F0 (~ц )
основного
(5.76)
– нормированная согласованная
канала,
ориентированная
в
направлении на источник сигнала;
(~ц , п ) X (~ц ) X ( п ) / M
– нормированная ДН компенсационного
канала, ориентированная в направлении на источник помехи;
Fк (~ц ) k (~ц , п ) сп ( п , ц )
(при 𝑀ℎ ≫ 1, 𝑘
Таким
–
взвешенная
компенсационная
ДН
1).
образом,
оптимальная
диаграмма
направленности
представляет собой взвешенную разность двух согласованных диаграмм
направленности, ориентированных в направлениях на источник сигнала 𝜃ц
272
и помехи 𝜃п . В результате в оптимальной ДН формируется провал в
направлении на источник помехи. Рис. 5.23 иллюстрирует амплитудные
ДН F0 (~ ц ), Fк (~ц ) и Fопт (~ц ).
Поскольку
направлении
~
(п ,ц п ) 1, то значение оптимальной ДН в
на источник помехи равно
Fопт
~ц п
(1k)сп(п,ц ).
Таким образом, угловое подавление активной внешней помехи
можно рассматривать как компенсацию помехи, принятой по основной ДН
F 0 (
ц
)
, с помощью специально сформированной ДН для компенсации
помехи.
Заметим, что структурная схема Рис. 5.22 привлекает внимание тем,
что не требует дополнительной компенсационной антенны. И основной и
компенсационный канал здесь формируются из апертуры ФАР с двумя
наборами управляемых ФВ. Однако, при большом количестве помех m
иметь (m+1) наборов ФВ может оказаться практически сложнореализуемой
задачей, в особенности в аналоговом исполнении.
273
𝐹0 𝛼ц
цель
помехоноситель
1
M = 10
0,8
0,6
0,4
0,2
0
‐3 ‐2
𝐹𝑘 𝛼ц
1
0,8
‐1
‐0
а
1
2
𝛼ц
‐1
‐0
б
1
2
𝛼ц
‐1
‐0
в
1
2
𝛼ц
h = 100
0,6
0,4
0,2
0
‐3
‐2
𝐹опт 𝛼ц
1
0,8
0,6
0,4
0,2
0
‐3
‐2
Рис. 5.23. Согласованная ДН, ориентированная в направлении на цель (а);
взвешенная согласованная ДН, ориентированная в направлении на
помехоноситель (б); оптимальная ДН (в)
5.8.3. Коэффициент использования энергии
Определим величину отношения сигнал/помеха (ОСП) на выходе
линейной части устройства оптимальной пространственно-временной
обработки (оптимальной пространственной и согласованной временной).
В соответствии с (5.44), (5.57), (5.58) ОСП равно
2
( )[ Ф
1 ( ) X ( )] q 2 ,
q 2 q опт
X
ц
п
ц
0
274
(5.77)
где q02 2 Э0 / N 0 – отношение сигнал/помеха, за счет согласованной
временной обработки (см. раздел 3), Э0 – энергия сигнала, принимаемого
одним элементом АР.
При наличии одной АШП, подставляя (5.71) в (5.77), получим
2
Mh
2
2
2
qсогл
qопт
сп ( п ,ц ) qсогл
Kэ ,
1
1 Mh
где
(5.78)
2
( ) X
( ) q 2 Mq 2
q согл
X
ц
ц
0
0
– ОСП при отсутствии внешней АШП, т.е. при согласованной
пространственно-временной
обработке
сигнала
на
фоне
только
внутреннего шума
2
2
qопт
Mh
сп ( п , ц )
Kэ 2 1
1 Mh
qсогл
(5.79)
– коэффициент использования энергии сигнала ( 0 K э 1 ).
Коэффициент Кэ характеризует потери в ОСП по мощности при
оптимальной обработке в условиях внешней коррелированной помехи по
сравнению с согласованной (оптимальной) обработкой при отсутствии
коррелированной помехи, то есть в беспомехомовой ситуации. Эти потери
обусловлены возможным ослаблением сигнала при компенсации помехи и
зависят от угловых различий источников помехи и сигнала, т.е. от
величины
сп ( п , ц ) .
Отметим,
что
Кэ
наиболее
полно
характеризует
качество
оптимальной обработки, так как комплексно учитывает не только
подавление помехи, но и потери полезного сигнала по сравнению с
идеальной ситуацией, когда помеха отсутствует, а обработка полностью
согласована.
На рис. 5.24 показана зависимость Кэ от обобщенной угловой
координаты помехи 𝜈п
𝑀𝑑 sin 𝜃п , при воздействий сигнала по нормали к
АР ( ц 0 ). При этом помеха может изменять свое угловое положение от
275
~п 0
до ~п 3 . Например, при ~п Md sin п / 1,5
помеха будет
воздействовать по максимуму первого бокового лепестка ДН вида
|sin 𝑥 /𝑥|.
Если угловые направления на источники помехи и сигнала
совпадают, то ( п , ц ) 1 , и при
Mh 1
коэффициент Кэ → 0.
𝐾Э 𝜈п
1
0,8
M = 10,
h = 100
0,6
0,4
0,2
0
1
2
𝜈п
Рис. 5.24. Зависимость коэффициента использования энергии от углового
разноса между источниками сигнала и помехи
Это означает, что вместе с компенсацией помехи происходит
вычитание сигнала, а “провал” в оптимальной ДН совпадает как с
направлением на источник АШП 𝜃п , так и с направлением на цель 𝜃ц .
Однако, даже в этом неблагоприятном случае, отношение сигнал/помеха
на выходе устройства оптимальной обработки не хуже, чем аналогичное
ОСП на его входе, так как оптимальная обработка не может его ухудшить
(см. Приложение 9). При наличии угловых различий выходное отношение
сигнал/помеха повышается по сравнению с входным и по мере увеличения
этих различий коэффициент использования энергии стремится к единице
(Рис. 5.24.)
При наличии m (m M ) независимых источников АШП и выполнении
условия
( ) X
( ) 0, i j ,
X
пi
пj
M , i j ,
276
матрица Ф 1 ( п ) и выходное напряжение устройства пространственной
обработки Y (t ) представляются соотношениями:
m
1 ( ) Ι
Ф
п
hj
j 1 1 Mh j
( ) X
( ),
X
пj
пj
m
(t ) X
( ) Y
(t ) h ( , ) X
( ) .
Y (t ) Y
ц
j сп
пj
ц
пj
j 1
В этом случае m диаграмм направленности дополнительных каналов
Сигнал
Помеха 2
приема
Помеха 3
Помеха 4
Помеха 1
устанавливаются
направлениях
источники
на
помех
в
соответствующие
(Рис.
Оптимальная
5.25).
диаграмма
направленности представляет собой
линейную
комбинацию
ориентированных
Рис. 5.25. Основная и
компенсационные ДН
сигнала
и
на
источники
ДН,
источник
помех.
Её
максимум устанавливается в ожидаемом направлении прихода сигнала, а в
направлениях воздействия помех создаются провалы (Рис. 5.26).
Анализ оптимальной пространственной обработки до сих пор был
ограничен
M-
элементной линейной АР. Если используется другой тип АР,
например плоская АР, то под
M
при компенсации помех следует понимать
количество управляемых модулей (элементов) в ней, либо количество
сформированных согласованных ДН.
277
цель
𝑓опт 𝛼
1
0,8
0,6
M = 10,
h = 100
0,4
0,2
0
‐3
‐2
‐1
‐0
1
2
𝛼
Рис. 5.26. Оптимальная ДН при наличии 4-х постановщиков помех
В заключение отметим, что полученный выше алгоритм оптимальной
пространственной
обработки
предполагает
априорные
знания
о
направлениях на цель 𝜃ц и помеху 𝜃п . В реальных сигнально-помеховых
ситуациях такая информация отсутствует и поэтому для пространственной
обработки нельзя использовать точно известную КМ помехи 𝚽п и ей
обратную 𝚽
. В процессе работы РЛС эти матрицы должны быть оценены,
что свидетельствует о необходимости процедуры адаптации. Из-за
неизбежных ошибок при оценке КМ, работа по оценочным матрицам 𝚽п и
𝚽п 𝟏 позволяет получить только квазиоптимальные алгоритмы. Их
показатели качества ниже, чем у оптимального, но
они могут
асимптотически стремиться к нему по мере повышения точности
оценивания.
5.9.
Оптимальная обработка аналогового сигнала на фоне
стационарного небелого шума
5.9.1. Оптимальная обработка на фоне пассивных помех
Примером
небелого
(по
частоте)
шума
является
пассивная
маскирующая помеха (отражения от местных предметов, поверхности
моря, гидрометеоров, облака диполей и т.д.). В общем случае пассивная
помеха (ПП) является нестационарной. Однако в окрестности ненулевых
значений полезного сигнала истинную нестационарную ПП можно
278
приближенно заменить эквивалентной стационарной с корреляционной
функцией (t s )` .
Стационарный небелый шум является коррелированным во времени
случайным процессом и поэтому его можно рассматривать применительно
к одноканальному приему. Многоканальность приемной антенны здесь не
имеет значения. В связи с этим воспользуемся соотношениями (5.32-5.34)
и для
M 1
имеем
(t s)r(s) ds x(t )
(5.80)
N( f ) e
(t s )
j 2f ( t s )
df ,
(5.81)
x (t )
g
x
( f ) e j 2ft df ,
(5.82)
N( f ) – спектральная плотность мощности (энергетический спектр)
стационарного небелого шума, g x ( f ) – спектральная плотность сигнала.
Из формулы (5.82) после преобразований, по аналогии с п. 4.5.2,
получим выражение для частотной характеристики оптимального фильтра
для случая небелого шума:
K опт ( f ) С g r* ( f ) e j 2 ft 0 ,
(5.83)
где
g r ( f )
r (t ) e
j 2 ft
dt .
(5.84)
- спектральная плотность весового вектора (весовой вектор в частотной
области).
После подствановки (5.81) и (5.82) в (5.80) и получим
N ( f ) r ( s) e
j 2fs
ds e
j 2ft
df g x ( f ) e j 2ft df
279
(5.85)
Используя (5.84) и сопоставляя это выражение с подынтегральным в
(5.85), найдем спектральную плотность весового вектора
N ( f ) g r ( f ) g x ( f ) или g r ( f )
g x ( f )
N( f )
(5.86)
Подставляя (5.86) в (5.83), окончательно имеем
g * ( f ) j 2ft 0
K опт ( f ) С x
e
.
N( f )
(5.87)
где С – нормирующий коэффициент
Таким образом, оптимальная обработка аналогового сигнала на фоне
стационарного небелого шума может быть выполнена с помощью фильтра,
имеющего частотную характеристику (5.87). При этом больший вес
придается менее «зашумленным» составляющим спектра сигнала, что
обеспечивается делением на N(f).
Рис. 5.27 поясняет принцип формирования АЧХ оптимального
фильтра для случая обработки пачки радиоимпульсов с полностью
известными параметрами на фоне ПП. На Рис. 5.27а изображен АЧС
сигнала в виде прямоугольной пачки прямоугольных радиоимпульсов.
Максимум центрального гребня АЧС сосредоточен в окрестности частоты
f 0 Fдц , где Fдц – доплеровская частота отраженного от цели сигнала. На
Рис. 5.27б показан энергетический спектр помехи. Он представляет собой
энергетический спектр аддитивной смеси флуктуаций отражений от
мешающих объектов при их импульсном облучении и внутреннего шума.
Максимум его центрального гребня сосредоточен в окрестности частоты
f 0 Fдп , где Fдп –доплеровская частота отражений от мешающих объектов.
280
1
𝑇
1
𝑀𝑇
АЧС
сигнала
а
Пфл
𝑓0
б
𝐹ДЦ
𝑓0
f
Энергетический
спектр помехи
𝐹ДП
f
АЧХ оптимального
фильтра
в
f
Рис. 5.27. АЧХ оптимального фильтра
Таким образом, на рис. 5.27 наблюдаются частотные различия
между сигналом и помехой, обусловленные разностью скоростей цели и
источников помехи.
Амплитудно-частотная
характеристика
(рис.
5.27в)
𝐾опт 𝑓
оптимального фильтра имеет провалы (зоны подавления помехи) и гребни
(зоны накопления полезного сигнала). Положение провалов на частотной
оси совпадает с положением гребней энергетического спектра помехи, а
форма провалов определяется формой этих гребней. Положение на оси
частот гребней АЧХ (рис. 5.27в) соответствует положению гребней АЧС
полезного пачечного сигнала (рис. 5.27а).
Отметим аналогию между способами компенсации активных и пассивных
помех. В первом случае в пространственном направлении на помеху формируется
провал ДН, а ее максимум «смотрит» на цель. Во втором случае провалы формируются
в частотной области, где спектр помехи имеет наибольшую интенсивность, а максимум
ЧХ устройства обработки согласуется со скоростью Vrц. В обоих случаях, если между
целью и помехой нет различий, пространственных – для активной помехи и частотных
для пассивной, их компенсация теоретически невозможна. Принципиальное различие
заключается лишь в том, что пространственный спектр АШП – дискретный, а
частотный ПП – непрерывный.
Представим
выражение
(5.87)
для
оптимального фильтра в эквивалентном виде:
281
частотной
характеристики
K 1 ( f )
В
этом
1
,
N( f )
случае
g *x ( f ) j 2ft0
e
,
N( f )
1
N( f )
K опт ( f ) K 1 ( f ) K 2 ( f ) С
(5.88)
g *x ( f ) j 2ft0
e
.
K 2 ( f ) С
N( f )
оптимальный
фильтр
(5.89)
представляет
собой
последовательное соединение двух линейных фильтров с частотными
характеристиками К1 ( f ) и К 2 ( f ) (Рис. 5.28, а).
а
б
Рис. 5.28. Варианты построения структурной схемы оптимального
фильтра
Первый
фильтр
с
частотной
характеристикой
K1 f 1/
Nf
«обеляет» помеху. При этом помеха – небелый шум при прохождении
через этот фильтр преобразуется в белый шум и компенсируется. Так же,
как и для АШП этот фильтр называют обеляющим. Процесс «обеления»
помехи также приводит к искажению спектральной плотности полезного
сигнала.
Ее
g x1 ( f ) g x ( f ) /
значение
N( f )
g x ( f )
может
быть
представлено
в
виде
. Дальнейшая обработка в фильтре с ИХ К 2 ( f ) (5.89)
сводится к согласованной с новым (искаженным) сигналом.
Теперь представим выражение (5.87) для ЧХ оптимального фильтра
еще в одной эквивалентной форме:
1
g *x ( f ) e j 2ft0 ,
N( f )
(5.90)
K Н ( f ) С g *x ( f ) e j 2ft0 .
(5.91)
K опт ( f ) K П ( f ) K Н ( f ) С
K П ( f ) KП ( f )
При
этом
1
,
N( f )
оптимальный
фильтр
будет
представлять
собой
последовательное соединение двух линейных фильтров с частотными
характеристиками KП ( f ) и K Н ( f ) (Рис. 5.28б). Фильтр с характеристикой
282
KП ( f ) 1/ N ( f ) “переобеляет” (подавляет) помеху, т.е. это – обращающий
фильтр. На его выходе фильтр с частотной характеристикой K Н ( f ) (5.91)
выполняет операцию согласованной фильтрации неискаженного сигнала.
Разновидности схем устройств оптимальной время – частотной
обработки для рассматриваемого случая импульсного излучения показаны
на Рис. 5.29.
Применительно к обработке когерентной пачки на фоне пассивной
помехи первый фильтр с ЧХ KП ( f ) получил название гребенчатого
фильтра подавления (ГФП). Второй фильтр с ЧХ K Н ( f ) в этом случае
включает в себя и согласованный фильтр одиночного импульса пачки и
гребенчатый фильтр накопления, о которых уже упоминалось в разделе 4
при анализе СФ для пачки радиоимпульсов.
а
б
СФОИ
f0
ГФП
f
ГФН
f0 - Fдп f
f0 - Fдп
f
ГФН1
в
СФОИ
ГФП
ГФНМ
г
СФОИ
ГФП
Д
НН
Рис. 5.29. Устройства обработки пачки радиоимпульсов на фоне
пассивной помехи.
Согласно Рис. 5.29а операцию накопления энергии полезного сигнала
выполняют: в пределах одиночного радиоимпульса – согласованный с ним
фильтр, а в пределах пачки радиоимпульсов – ГФН. В свою очередь ГФП
реализует подавление пассивной помехи.
Каждому элементу схемы (Рис. 5.29а) поставлены в соответствие
АЧХ, показанные на Рис. 5.29б. Максимум АЧХ СФОИ и центрального
гребня АЧХ ГФН настроен на частоту f0 – FДЦ, а провалы АЧХ ГФП
283
сосредоточены на частотах f0 – FДП + n/Т, где Т – период повторения
импульсов, n 0, 1, 2.... При этом форма провалов определяется формой
энергетического спектра пассивной помехи.
Поскольку ГФН должен настраиваться на доплеровскую частоту
сигнала, то в широких пределах изменения скорости цели он должен иметь
многоканальную структуру по частоте Доплера Рис. 5.29в). На практике,
при малом количестве импульсов в пачке, многоканальный когерентный
накопитель импульсов иногда заменяют одноканальным некогерентным
накопителем (НН), как показано на Рис. 5.29г, так как НН гораздо проще в
реализации.
Отмеченное выше сходство процедур оптимальной и частотно-временной
обработки можно объяснить сходством спектров пачки импульсов (Рис. 5.29) и ДН
антенной решетки. Спектр пачки представляет собой произведение широкого спектра
одиночного импульса на узкий спектр периодической последовательности импульсов,
зависящий от числа импульсов M и периода повторения T. Аналогично ДН решетки
определяется произведением широкой ДН одиночного излучателя на узкий множитель
решетки, зависящий от числа излучателей M и шага решетки d. В обоих случаях имеют
место неоднозначность, которая характеризуется наилучшими побочными
максимумами спектра пачки и дифракционными лепестками ДН решетки.
На Рис. 5.30 показан вид индикатора кругового обзора РЛС при
отсутствии (Рис. 5.30а) и наличии (Рис. 5.30б) компенсации ПП.
а
б
Рис. 5.30. Вид ИКО при отсутствии (а) и наличии (б) компенсации
пассивной помехи
Применительно к РЛС с АР при наличии только внешней пассивной
помехи
пространственно-временная
284
обработка
разделяется
на
согласованную пространственную обработку и оптимальную временную
обработку (Рис. 5.31).
ФАР
Согласованная
пространственная обработка
Оптимальная
временная обработка
𝜑1
∑
𝜑2
СФОИ
ГФП
ГФН
Д
𝜑М
Рис. 5.31. Устройство оптимальной обработки пачки радиоимпульсов на
фоне пассивной помехи в РЛС с АР
В ситуации, показанной на Рис. 5.31, после согласованной обработки
в АР сигнал накапливается когерентно по пространству. К полученному
результату
этой
обработки
применяется
оптимальная
временная
обработка, которая заключается в компенсации пассивной помехи и
временном накоплении сигнала.
5.9.2. Свойства и характеристики пассивных помех
Защита
РЛС
от
пассивных
помех
(ПП)
естественного
и
искусственного происхождения является одной из важнейших проблем
теории и практики радиолокации. Специфическая особенность ПП
заключается в том, что они воздействуют в широкой полосе частот
зондирующего сигнала, а их интенсивность возрастает пропорционально
повышению энергетического потенциала РЛС.
Мощность отражений от ПП на дальности 𝑅п на входе приемника РЛС
определяется соотношением
Pпп
PИ G λ σ Vи
,
4π R П
(5.92)
где G0 – КНД совмещенной на прием и передачу антенны с рабочей
длиной волны λ0,
𝜎 – ЭПР ПП в единице объема VИ0 элемента разрешения РЛС,
285
РИ – излучаемая импульсная мощность.
Разрешаемый импульсный объем сигнала 𝑉и приближенно равен
𝑐𝜏и
Vи
𝐼𝐼
(5.93)
4
где 𝐼
,
𝐹 , 𝜃 𝑐𝑜𝑠𝑑Ω–интегралы от квадратов нормированных
ДН 𝐹 , 𝜃 в двух взаимно перпендикулярных плоскостях 𝜑
0, 𝜑
𝜋⁄2 , 𝜏и – длительность зондирующего сигнала РЛС.
Элементы
разрешения
i
Цель
ИСТОЧНИКИ
ПП
1
РЛС
Рис. 5.32. Возрастание импульсного объема по мере увеличение
дальности 𝑅П
При выводе (5.92) предполагается, что импульсный объем сигнала
равномерно заполнен большим количеством отражателей с одинаковыми
удельными ЭПР σ0, и поэтому их суммарная ЭПР равна 𝜎П
Существенным
отличием
уравнения
(5.92)
от
𝜎 𝑉и 𝑅П .
традиционного
уравнения радиолокации (см. 2.8) является зависимость мощности
принятого сигнала от дальности по закону 1/R2П, а не 1/R4, так как по мере
увеличения дальности возрастает и объем облучаемого пространства.
На Рис. 5.33 показаны снятые в процессе работы РЛС примеры
реальных помеховых ситуаций в виде разверток по дальности на
фиксированном азимуте (по оси x отложена дальность в номерах отсчетов,
соответствующих элементу разрешения, а по оси y – интенсивность
отражения в дБ). Как видно из этих рисунков интенсивность ПП может
достигать 60-80 дБ относительно уровня собственных шумов приемника.
286
Рис. 5.33. Примеры отражений от пассивных помех на фиксированном
азимуте
В общем случае для селекции полезных сигналов на фоне отражений
от ПП можно использовать их пространственные, поляризационные и
частотные различия.
Пространственные различия связаны с тем, что цель является
точечным
вторичным
излучателем,
а
ПП,
например,
облака
–
протяженными. Поэтому, как следует из (5.92) и (5.93), повышая
разрешающую способность РЛС по угловым координатам и дальности, т.е.
реализуя пространственную селекцию, можно улучшить наблюдаемость
полезного сигнала на фоне помех.
Поляризационные различия связаны с неодинаковой степенью
деполяризации полезных и помеховых эхо-сигналов. Например, хорошо
известно, что при облучении гидрометеоров колебаниями с круговой
поляризацией отраженные колебания также имеют круговую поляризацию,
но с обратным вращением плоскости поляризации. Поскольку поляризация
приемной антенны ортогональна по отношению к падающей волне она
287
существенно ослабляется или вообще не принимается. Выигрыш от такой
поляризационной селекции обычно не превышает 15-18 дБ.
При фиксированных параметрах РЛС метод, основанный на
уменьшении импульсного объема VИ, практически трудно реализуем, а
выигрыш от поляризационной селекции в большинстве ситуаций
недостаточно эффективен. В связи с этим основным методом борьбы с ПП
является
использование
частотных
(скоростных)
различий
между
отражениямии от ПП и от целей, из-за разности их радиальных скоростей,
как было показано на Рис. 5.27. На этой основе для борьбы с ПП в РЛС
широко используются устройства селекции движущихся целей (СДЦ).
В основе СДЦ лежит требование высокой разрешающей способности
по скорости. В импульсных РЛС это требование обеспечивается за счет
применения пачек когерентных импульсов, длительность которых может
быть достаточно большой (см. подраздел 1.5). Поэтому в таких РЛС СДЦ
реализуется на этапе междупериодной обработки. Основные положения
теории построения таких устройств были изложены в подразделе 5.9.1.
5.9.3. Устройства СДЦ и их характеристики.
В подразделе 5.9.1 показано, что оптимальная междупериодная
обработка сводится к междупериодной компенсации на основе ГФП
помехи и междупериодному когерентному накоплению на основе ГФН
импульсов
пачки.
Иногда
когерентное
накопление
заменяется
некогерентным, но и в этом случае этап когерентной компенсации помехи
сохраняется.
Рассмотрим построение ГФП с ЧХ КП(f), который согласно (5.88)
«обеляет» выходной спектр помехи. Процесс обеления ПП сопровождается
трансформацией ее гребенчатого спектра в равномерный. Это достигается
тем, что гребни (максимумы) спектра ПП ослабляются за счет провалов в
АЧХ обеляющего фильтра, когда они совмещаются. Обобщенная
структурная схема такого «обеляющего» фильтра показана на Рис. 5.34.
288
1 2 3
...
М
t
RM
СФОИ
T
RM-1
∑
T
RM-2
Д
T
T
R2
R1
Рис. 5.34. Обобщающая структурная схема обеляющего фильтра
Как видно из Рис. 5.34, обеляющий фильтр представляет собой
многоканальное устройство череспериодного вычитания (ЧПВ) ПП. В нем
коррелированные
реализации
помехи
смежных
периодов
посылки
совмещаются во времени с помощью линий задержки (ЛЗ) на период Т.
Тогда помехи, поступающие на вход сумматора по незадержанному каналу
компенсируются помехами задержанных каналов за счет подбора
комплексных коэффициентов 𝑅 i, оптимизированных для приема одного
импульса пачки (напомним, что накопление энергии пачки осуществляется
на следующем этапе с использованием ГФН).
Следует отметить, что схема Рис. 5.34 легко обобщается и на случай
непериодического, вобулированного зондирования, когда период 𝑇
𝑐𝑜𝑛𝑠𝑡. В этой ситуации отводы ЛЗ расставляются неравномерно.
Сначала рассмотрим случай, когда число импульсов в пачке
ограничено (М 3).
Будем полагать ПП стационарной и значительно превышающей по
интенсивности полезный сигнал. Рассмотрим две конкретные схемы ЧПВ
показанные на Рис. 5.35 (однократное вычитание) и Рис. 5.36 (двухкратное
вычитание).
289
+
T
СФОИ
‐
ΔZ1
∑
Рис. 5.35. Однократное вычитание
+
+
T
T
СФОИ
‐
∑
‐
∑
ΔZ2
Рис. 5.36. Двукратное вычитание
При М=2 полезный сигнал когерентен в одном периоде T, и
представляется
XТ=‖1 0‖,
вектором
т.е.
когерентная
обработка
реализуется внутри одного периода T. Корреляционную матрицу ПП
зададим в общем виде
𝚽
𝜎П
1
𝜌∗
𝜌
,
1
(5.94)
где 𝜎П – дисперсия помехи, существенно превышающая дисперсию шума
|𝜌 |𝑒
𝜎П ≫ 𝜎Ш , 𝜌
– комплексный коэффициент междупериодной
( |𝜌 |
корреляции ПП
1 .
В идеализированной ситуации фаза коэффициента корреляции
𝜌однозначно связана с доплеровской частотой Fд и равна arg𝜌=2πFДТ.
Тогда в соответствии с соотношением (5.9) весовой вектор обработки с
точностью до постоянного коэффициента равен
𝒓
𝚽
𝑿
1
𝜌∗
𝜌
1
1
0
1
𝜌∗
(5.95)
Отсюда выходной эффект такой обработки можно представить в виде
𝛥𝑍
𝑧
𝜌𝑧
𝑍
, при |𝜌|
𝑍 𝑒
1
(5.96)
где Z1 и Z2 – комплексные амплитуды первого и второго импульсов
пачки после внутрипериодной обработки в СФОИ.
290
Таким образом, в схеме Рис. 5.35 значение arg𝜌 должно быть учтено
введением соответствующего фазовращателя, учитывающего скорость ПП.
Если фазовращатель не используется, то это означает что устройство СДЦ
«настроено» на подавление отражений от неподвижных объектов в
окрестности Vr ≈ 0 (см. Рис. 5.27).
При М=3 можно использовать когерентность ПП в двух смежных
периодах зондирования. В этой ситуации, полагая 𝜌
1, элементы КМ
помехи оценим квадратичной зависимостью
𝜎 1
𝛷
где 𝛾
𝛾 𝑚
𝑛
,
(5.97)
𝑐𝑜𝑛𝑠𝑡, регулирующая скорость снижения корреляции между m-ым
и n-ым импульсами пачки (m, n ∈ 1, 2, 3)
Полезный сигнал также будем полагать когерентным только в одном
периоде 𝐗 Т
‖1
0
0‖. Определим весовой вектор для этого случая
m, n 1,2,3
1
1
1 𝛾
1 4𝛾
𝑹
𝛾
1
1
𝛾
1 4𝛾
1
1 𝛾 ∙ 0
1
0
1
2
1
(5.98)
Отсюда следует, что обработка на основе двухкратного ЧПВ
приводит к выходному эффекту вида
ΔZ2=Z1+Z3-2Z2=(Z3-Z2)-(Z2-Z1)
(5.99)
В литературе двухкратное ЧПВ в соответствии со значениями
параметров весового вектора R часто называют «СДЦ 1, 2, 1».
ЧПВ на основе схем Рис. 5.35 и Рис. 5.36 нашли наиболее широкое
применение в практике радиолокации. Это объясняется следующим
обстоятельством. Пусть значение М теоретически не ограничено (М≫1) –
Х Т = ‖1
0
0‖,
0…
а
коэффициент
междупериодной
описывается экспоненциальной функцией вида 𝜌(τ)=𝑒
корреляции
(arg𝜌=0), что
часто встречается на практике. Тогда корреляция двух импульсов
отстоящих
равна:𝜌 𝑘𝑇
друг
от
друга
на
k
периодов
𝜌
291
зондирования
будет
Используя (5.98), можно показать, что в этом случае R2= ρR1, а
остальные компоненты весового вектора приближенно равны нулю. Это
означает, что для заданной функции корреляции оптимально однократное
ЧПВ. Отметим, что увеличение кратности компенсации тем эффективней,
чем ближе корреляционная функция к колокольному виду. Однако
эффективность ступеней с номерами более 2х существенно меньше, чем у
двух первых. При этом аппаратурные затраты на увеличение числа
ступеней могут оказаться неоправданными.
Не
теряя
общности,
рассмотрим
амплитудно-скоростные
характеристики (АСХ) устройств СДЦ с некогерентным накопителем на
выходе. Поскольку отраженные от цели импульсы пачки имеют
ограниченную длительность и когерентны, их взаимные сдвиги фаз зависят
от радиальной скорости Vr движения цели. Тогда под амплитудноскоростной
характеристикой
(АСХ)
устройства
СДЦ
понимают
зависимость амплитуды выходного напряжения сигнала от приращения
радиальной скорости цели ΔVr относительно ожидаемого значения:
𝑍 𝛥𝑉 𝑅∗
|𝑆 𝛥𝑉 |
(5.100)
Здесь результаты внутрипериодной обработки i-го импульса 𝑍 могут
различаться только фазовыми множителями вида ехр(-j4πf0ΔRцi/c),где ΔRцi
– смещение цели в i-ом периоде зондирования относительно ожидаемого
значения Rц0.
При единичной амплитуде отраженных от цели импульсов пачки за
счет этих множителей имеем
Zi(ΔVr)=exp
𝑗2𝜋𝛥𝐹д 𝑡
𝑡
𝑒𝑥𝑝
𝑗4𝜋𝑓 𝑖
𝑙
𝑇 ,
(5.101)
где ti – til = T = const при постоянном периоде зондирования.
Для устройства СДЦ в виде однократного ЧПВ (М=2, R0=-R1=1)
определим модуль АСХ, который равен:
292
|𝑆 𝛥𝑉 |
Для
1
устройства
дТ
𝑒
СДЦ
2 𝑠𝑖𝑛 𝜋𝛥𝐹д Т
в
виде
(5.102)
двухкратного
ЧПВ
(М=3, R0=- R1/2= R2=1) имеем
|𝑆 𝛥𝑉 |
1
2
дТ
дТ
𝑒
4 𝑠𝑖𝑛 𝜋𝛥𝐹д Т
(5.103)
АСХ, соответствующие (5.102) и (5.103), показаны на Рис. 5.37. Из
этих рисунков видно, что они имеют периодический характер с
чередующимися минимумами и максимумами через 1/Т по оси частот или
через 𝜆⁄2𝑇 по оси скоростей.
S(ΔVr)
S 2(ΔV r)
∆𝑉𝑟
S1(ΔV r)
ΔVr
𝜆⁄2𝑇
Рис. 5.37. Скоростные характеристики ЧПВ
Физически это означает чередование «слепой» и «оптимальной»
скоростей целей. Как уже отмечалось в разделе 1, если ΔVrk=(λ0/2Т)k
(k=0,1,…), т.е. цель за время Т пролетает расстояние, кратное λ0/2, то
вычитаемые импульсы оказываются в фазе и их компенсация теоретически
приводит к нулю амплитуды на выходе.
С другой стороны, если ΔVrk=(λ0/4Т)(2k+1), т.е. за время Т цель
пролетает расстояние кратное нечетному количеству λ0/4, то вычитаемые
импульсы оказываются в противофазе и амплитуда на выходе достигает
максимума.
Все
остальные
значения
скоростей
определяют
промежуточные значения аргумента АСХ.
Как видно из сравнения графиков на Рис. 5.37 зоны режекции помехи
при двухкратном ЧПВ шире, чем при однократном, что является
положительным фактором при работе в помехах с относительно широким
спектром.
Для борьбы с эффектом «слепых» скоростей в РЛС часто
используется вобуляция интервалов следования импульсов пачки, когда
293
Т const. В этом случае глубина минимумов АСХ и значения максимумов
АСХ уменьшаются, а сама АСХ становится более равномерной, как
показано на Рис. 5.38). При этом глубина провалов и их частота зависят от
количества и соотношения интервалов следования импульсов.
S(ΔVr)
1
ΔV r
Рис. 5.38. Скоростная характеристика при вобуляции интервалов
следования импульсов.
Эффективность устройств СДЦ обычно оценивается коэффициентом
подпомеховой видимости (КПВ), который может быть получен из
соотношения
КПВ=
Рс
Рп ВЫХ
Рс
Рп ВХ
,при РП≫Рш
(5.104)
где (Рс/РП)вх,вых – отношение сигнал/помеха на входе/выходе устройства
СДЦ. Формулу для КПВ можно также представить в следующем виде:
𝐾ПВ
|𝐗 𝑹∗ |
М 𝐘 𝑹∗ 𝐘 ∗ 𝑹
𝐗 ∗ 𝐗𝑹∗ 𝑹
𝑹∗ 𝚽𝑹
(5.105)
Для определения КПВ при однократном ЧПВ зададим:
𝐗
𝚽
/ ‖ – вектор когерентного 2 х-импульсного сигнала.
‖1 𝑒
1 𝜌
– корреляционная матрица помехи
𝜌∗ 1
arg𝜌=4πVrПТ/λ0
–
аргумент
коэффициента
корреляции для скорости помехи, равной VrП.
294
междупериодной
R
‖1
𝜌∗ ‖ – весовой весовой вектор, оптимизированный к приему
одиночного импульса (ХТ
‖1 0‖)
Подставляя вышеперечисленные параметры в (5.105) получим
КПВ
2/ 1
|𝜌 |
1
|𝜌| 𝑐𝑜𝑠 4𝜋 𝑉
𝑉
п
Т/𝜆
(5.106)
Из (5.106) следует, что КПВ изменяется в следующих пределах:
- при «слепых» скоростях цели (Vr = Vr п + kλ0/2T)
𝐾ПВ
2/ 1
|𝜌| ,𝑙𝑖𝑚 → 𝐾ПВ → 1
→
- при «оптимальных» скоростях цели (𝑉
𝐾ПВ
2/ 1
|𝜌 |
𝑉
п
)
и 𝑙𝑖𝑚 𝐾ПВ → ∞.
| |→
Отсюда следует, что при возрастании модуля коэффициента
корреляции возрастает и выигрыш рассмотренной обработки для любых
скоростей цели.
В радиолокации широкое распространение получили устройства
СДЦ, компенсирующие отражения от неподвижных объектов, в первую
очередь от местных предметов, так как они имеют максимальную
интенсивность. Поэтому обычно они рассчитываются на Vrп≈ 0, а,
следовательно, в этом случае АСХ и КПВ будут зависеть только от скорости
цели Vrц, что обычно подразумевают в известной литературе.
С развитием цифровой обработки в современных РЛС все большее
применение находят многоканальные устройства когерентного накопления
(см.рис. 5.29в). Как правило, они рассчитаны на N ожидаемых скоростей
целей и должны перекрыть весь заданный диапазон от Vrmin до Vrmax. При
этом предполагается, что VrПVrmin.
Принцип построения ГФН непосредственно вытекает из структуры
N-точечного алгоритма ДПФ.
𝐺 𝑙
/
𝑌 𝑛 𝑒
295
,
(5.107)
аналогично тому, как формируются лучи МАР (см. раздел 2). В данном
случае, коэффициент G(l) алгоритма ДПФ можно рассматривать как
выходное напряжение l-ого фильтра, настроенного на ожидаемую скорость
𝑉 . Очевидно, что число фильтров N не может превышать чило импульсов
в пачке М, т.е. всегда N M. На выходе каждого ГФН ОСШ для цели на
«оптимальной» скорости повышается в М раз. Это справедливо в
предположении, что Y(n) = Y0 = const.
Если помеха малоскоростная и имеет достаточно узкий спектр, то
нулевой фильтр, рассчитанный на Vrп=0 не используется, а вместо него
применяют режекторный фильтр с глубоким провалом в окрестности
нулевой скорости. Если априори известен такой характер помехи, то на
практике часто отказываются от ЧПВ на основе ГФП, ограничиваясь
использованием ГФН при простой форме спектров флюктуаций ПП.
296
6. ОСНОВЫ СТАТИСТИЧЕСКОЙ ТЕОРИИ РАЗРЕШЕНИЯ И
ИЗМЕРЕНИЯ КООРДИНАТ ЦЕЛЕЙ.
В разделе рассматриваются теоретические подходы к последующим за
обнаружением этапам радиолокационного наблюдения: разрешению целей и
измерению (оцениванию) их координат. Анализ этих этапов и синтез алгоритмов
обработки проводятся на основе статистической теории, позволяющей получить
предельно достижимые характеристики, связанные с частотно-временными и
пространственными функциями неопределённости.
Для оценки разрешающей способности в рассмотрение вводятся постоянные
разрешения, которые определяются для согласованного и оптимального (при наличии
помехи) режима «обнаружения-разрешения».
Предельные точностные характеристики раздельных и совместных оценок
информационных параметров соответствуют неравенству Крамера-Рао, полученного
из статистики Фишера и корреляционной матрицы ошибок. В разделе также
представлены структурные схемы радиолокационных измерителей-дискриминаторов,
реализующих оптимальные методы измерений.
6.1.
Связь разрешающей способности с функциями
неопределенности радиолокационных сигналов. Постоянные
разрешения.
После того, как цель обнаружена, следующим этапом наблюдения
является задача разрешения целей в заданном импульсном объеме.
Разрешение в статистической трактовке означает необходимость ответить
на следующий вопрос: в обнаруженной смеси с помехой n(t) присутствует
один полезный сигнал x(t, α0) или набор из N однотипных сигналов x(t, αi),
где αi – вектор информационных параметров i-ого сигнала (i0N).
Это означает, что в общем случае на выходе согласованной
обработки (см. раздел 4) порог обнаружения превысила смесь вида
𝑦 𝑡
𝑥 𝑡, 𝜶𝟎
𝐴 𝑥 𝑡, 𝜶𝒊
𝑛 𝑡
(6.1)
где Аi(1,0) – при наличии и отсутствии сигнала с i-ым
информационным вектором 𝛼 , n(t)–аддитивный шум.
Как показано в разделе 4, результаты согласованной обработки
характеризуют функции неопределенности, непосредственно связанные с
297
мерами разрешения по каждому информативному параметру вектора α (см.
подраздел 4.4.2).
Разрешение по угловым координатам обычно определяют параметры
антенной системы, где в качестве ФН выступает ДН. За разрешение по
дальности и радиальной скорости «отвечает» частотно-временная функция
Вудворта, при помощи которой можно охарактеризовать способность РЛС
различать цели в луче антенны с близкими значениями дальности R0 и
R0+R при одинаковой скорости Vr0 или с близкими значениями скоростей
Vr0 и Vr0+ΔVr0 при одинаковой дальности R0. В общем случае эта функция
определяет возможность совместного разрешения целей с векторами
информационных параметров 𝜶
, 𝐹Д
и 𝜶
𝜶
, 𝐹Д
𝐹Д .
Прежде, чем перейти к статистическому анализу разрешения,
рассмотрим широко распространенное заимствованное из оптики понятие
разрешение по Рэлею, о котором упоминалось в разделе 1. Критерий Рэлея
часто используют и в радиолокации для количественного определения
разрешающей способности по координатам. Напомним, что в соответствии
с этим критерием в оптике два равноамплитудных сигнала полагают
разрешенными, если при их одновременном наблюдении между ними
имеется «провал», равный 0,7Аmax, т.е. минус 3 дБ по мощности. Как
видно из рисунка 1.12, этому условию соответствует сдвиг аргумента на
x, который и определяет разрешающую способность по произвольному
параметру x.
Для радиолокации, где пространственно-временные сигналы x(t,α0)
являются
комплексными
функциями
со
случайными
фазами
и
амплитудами, заимствование критерия Рэлея из оптики не всегда
корректно.
Результат взаимодействия двух радиолокационных сигналов обычно
имеет случайный интерференционный характер. При этом в зависимости
298
от соотношения амплитуд и фаз эти сигналы могут быть как разрешены,
так и не разрешены по критерию Рэлея. Однако в ситуациях, когда в
суммарной огибающей двух одинаковых сигналов наблюдается провал
мощности более чем в два раза, по аналогии с оптикой часто говорят о
рэлеевском
разрешении
по
координате.
Широкое
распространение
рэлеевского (детерминистского) подхода связано с возможностью простой
проверки в условиях реальной работы РЛС. В качестве примера на рис. 6.1
показаны ситуации, когда 3 цели разрешаются а) и не разрешаются б).
а)
б)
Рис. 6.1. Пример разрешения 3-х целей по частотно-временным
параметрам (цели разрешаются (а), цели не разрешаются (б)).
Заметим, что причиной частого совпадения результатов при
статистическом и детерминистском подходах является то, что в основу
определения характеристик разрешения в обоих случаях положена
структура ФН по параметру α или вектору α.
В отличие от рэлеевского, статистический подход позволяет
трактовать задачу разрешения сигналов в терминах статистической теории
обнаружения. Тогда ответ на вопрос о числе и номерах сигналов,
присутствующих в реализации y(t) (6.1) можно рассматривать как
параллельное обнаружение каждого из N сигналов. Причем, задача о
наличии в смеси i-го сигнала x(t, αi) должна решаться независимо от того,
присутствуют ли в смеси y(t) другие сигналы. Таким образом, разрешение
299
в статистической трактовке интерпретируется как задача «разрешенияобнаружения».
Сначала сформулируем эту задачу только для частотно-временных
параметров 𝜶
‖𝑅, 𝑉 ‖, т.е. полагаем, что цели не разрешаются в луче
антенны, а помехой является белый гауссовский шум.
Согласно (6.1) в упрощенной трактовке задачу «обнаруженияразрешения» можно сформулировать следующим образом. Необходимо
определить наличие полностью известного сигнала 𝑥 (t, α0) в смеси с
шумом
𝐵
и,
возможно,
|𝐵 |exp 𝑗𝜑
мешающим
сигналом
вида
𝐵 𝑥 𝑡, 𝜶
,
где
. Причем комплексная амплитуда 𝐵 имеет случайных
характер, что обычно соответствует реальной ситуации.
Таким образом, аналогично подходу, изложенному в разделе 3,
задача обнаружения сигнала x(t,α0) сводится к двум возможным ситуациям
(гипотезам). При отсутствии и наличии полезного сигнала формула (6.1)
приобретает вид
𝑦 𝑡
𝑦 𝑡
𝑛 𝑡
𝑛 𝑡
𝐵 𝑥 𝑡, 𝜶
𝐵 𝑥 𝑡, 𝜶
, (А=0)
𝑥 𝑡, 𝜶 ), (А=1)
(6.2а)
(6.2б)
При записи (6.2) учтено, что в общем случае случайные амплитуды
мешающего сигнала 𝐵
и 𝐵
в рассматриваемых ситуациях могут быть
различными, а при отсутствии мешающего сигнала – 𝐵
𝐵
0.
Заметим, что мешающий сигнал в (6.2) является копией полезного сигнала,
но отличается от него вектором неэнергетических информационных
параметров 𝜶
‖𝑅 , 𝑉 ‖.
Как было показано в разделе 3, корректный подход к задаче
обнаружения сигнала x(t, α0) требует составить отношение правдоподобия
l(y), получить на его основе достаточную статистику, а после этого найти
вероятность ошибок. На этой теоретической основе задача сводится к
поиску закона модуляции сигнала x(t), который бы обеспечил его
наилучшую разрешающую способность.
300
Качественно эту задачу можно решить более простым способом,
отказавшись от количественных показателей. Для этого воспользуемся
теорией различения сигналов в ее геометрической трактовке. Сигналы
𝐵 𝑥 𝑡, 𝜶
, 𝐵 𝑥 𝑡, 𝜶
и 𝑥 𝑡, 𝜶
будем интерпретировать как векторы в
одной плоскости Р, как показано на рис.6.2.
n(t)
y(t)
y1(t)
∆D=y1(t)-y0(t)
P
y0(t)
Рис. 6.2. Пояснение к вопросу разрешения двух сигналов при наличии
шума.
Из этого рисунка видно, что сигналы в (6.2а) и (6.2б) будут тем
заметнее отличаться друг от друга, чем больше евклидово расстояние
между ними в плоскости ℙ. Квадрат этого расстояния 𝛥𝐷 равен энергии
их разности и чем он больше, тем лучше разрешаются сигналы
𝛥𝐷
𝑥 𝑡, 𝜶
𝐵 𝑥 𝑡, 𝜶
𝐵 𝑥 𝑡, 𝜶
𝑑𝑡
(6.3)
1
2
𝑋 𝑡, 𝜶
В (6.3) обозначено 𝛥𝐵М
𝛥𝐵М 𝑋 𝑡, 𝜶
𝐵
𝑑𝑡
𝐵 , а от мгновенных значений
сигналов x(t) совершен переход к их комплексным огибающим 𝑋(t) (см.
Приложение 2).
301
В результате преобразований из (6.3) для квадрата евклидова
расстояния получим
1
2
𝛥𝐷
𝑋 𝑡, 𝜶
𝛥𝐵
𝑋 𝑡, 𝜶
𝑋 𝑡, 𝜶 𝑋 𝑡, 𝜶
𝑅𝑒 𝛥𝐵
Э 1
𝛥𝐵
2
𝑑𝑡
2𝑅𝑒
𝛥𝐵
2Э
𝑑𝑡
𝑑𝑡
(6.4)
𝑋 𝑡, 𝜶 𝑋 𝑡, 𝜶
В (6.4) энергия Э сигнала 𝑋 𝑡, 𝜶
не зависит от компонент
𝑋 𝑡, 𝜶
информационного вектора 𝜶𝟎 и равна Э
Таким образом, величина 𝛥𝐷
𝑑𝑡
𝑑𝑡.
в основном будет зависеть от
последнего слагаемого в скобках формулы (6.4). Видно, что интеграл в
этом
слагаемом
представляет
собой
комплексный
коэффициент
корреляции двух копий комплексной огибающей сигнала, отличающихся
значениями
информационных
параметров
𝜶 и𝜶
соответственно.
Согласно (4.4) по определению он равен модулю нормированной ФН
|𝜒 𝜶𝟎 , 𝜶𝑴 |𝑒
комплексный
𝛥𝐵М
𝛥𝐵 𝑒
𝜶𝟎 ,𝜶𝑴
сигнала x(t,α по параметру α.. Учитывая также
характер
разности
амплитуд
разрешаемых
сигналов
, и переходя для наглядности от векторного параметра α
к единственному скалярному α, последнее слагаемое в (6.4) равно:
2|𝛥𝐵 ||𝜒 𝛼 , 𝛼
| cos 𝑎𝑟𝑔𝜒 𝛼 , 𝛼
𝑎𝑟𝑔𝛥𝐵
(6.5)
Согласно (6.5) независимо от величины 𝛥𝐵 , минимум величины
𝛥𝐷
𝑚𝑖𝑛, соответствующий наихудшему разрешению, будет получен,
если 𝑎𝑟𝑔𝜒 𝛼 , 𝛼
противофазны.
𝑎𝑟𝑔𝛥𝐵
Априорная
𝜋, когда полезный и мешающий сигналы
неопределенность
в
начальной
фазе
мешающего сигнала, равномерно распределенного на интервале (0-2π ,
делает вероятность такой ситуации конечной:
302
𝛥𝐷
Э 1
2|𝛥𝐵 |𝜒 𝛼 , 𝛼
𝛥𝐵
Для того, чтобы максимизировать значение 𝛥𝐷
потребовать, чтобы значение |𝜒 𝛼 , 𝛼
(6.6)
в (6.6) необходимо
| было как можно меньшим. Это
означает, что при отстройке параметра 𝛼
относительно 𝛼 уровень ФН
должен спадать как можно быстрее, что эквивалентно требованию высокой
остроты пика и минимизации уровня боковых лепестков «стационарной»
ФН.
Таким образом, качество разрешения зависит от закона модуляции
сигнала x(t) в том смысле, что для параметра 𝛼 , например, «дальности» или
«скорости», в соответствующем сечении должен быть острый максимум
ФН с максимальным уровнем подавления сигналов при отстройке
(см.рис.4.43). Этому условию соответствуют меры разрешения, введенные
в подразделе 4.5.
Определим, какими свойствами должен обладать сигнал и его ФН,
чтобы обеспечить требования к разрешающей способности РЛС в
координатах «дальность-скорость».
Для
решения
поставленной
задачи
определим
постоянные
разрешения по Δτ и ΔFд, полагая заданной ФН χ Δτ, ΔFд , и ее главные
сечения χ(Δτ,0) и χ(0,ΔFд). Обратимся к Рис. 6.3, на котором показаны два
главных сечения ФН и аппроксимирующие их прямоугольники равной
площади. Фактически это означает аппроксимацию главного максимума
3х-мерной ФН параллелепипедом. Исходя из этого, для таких ФН искомые
постоянные разрешения по координатам будут равны:
𝛥𝜏разр
𝛥𝐹разр
|𝜒 𝛥𝜏, 0 | 𝑑𝛥𝜏
𝜒 0,0
𝜒 0, 𝛥𝐹д
𝜒 0,0
303
𝑑𝛥𝐹д
(6.7.1)
(6.7.2)
Рис. 6.3. Постоянные разрешения: по временному запаздыванию (а), по
частоте Доплера (б).
Будем полагать, что разрешение двух сигналов осуществляется на
выходе амплитудного детектора после СФ или коррелятора. Поэтому
постоянные разрешения определяются через амплитуды комплексных
огибающих 𝛸(t) и их спектральных плотностей 𝐺 𝑓 , т.е. как показано в
Приложении
2,
высокочастотное
заполнение
сигналов
можно
не
вычисления
Δτразр (6.7.1) будем
учитывать.
В
простейшем
случае
для
рассматривать два сигнала с одинаковой амплитудой, отраженные от целей
с разностью временного запаздывания на Δτ, но с одинаковой (нулевой)
частотой Доплера (скоростью). Их комплексные огибающие имеют вид
𝛸(t) и 𝛸 𝑡
𝛥𝜏 , соответственно.
Аналогично для вычисления ΔFразр (6.7.2) рассматриваются два
равноамплитудных сигнала с разностью частоты Доплера ΔFд, но с
304
одинаковым временным запаздыванием (дальностью). Спектральные
плотности их комплексных огибающих имеют вид: 𝐺 𝑓 и 𝐺 𝑓
𝛥𝐹д ,
соответственно.
Если
полагать,
что
сигналы
имеют
одинаковую
знаменатели в (6.7) можно не учитывать, так как 𝜒 0,0
энергию,
1. В результате
получим
𝛥𝜏разр
𝜒 𝛥𝜏, 0 𝑑𝛥𝜏
𝛥𝐹разр
𝜒 0, 𝛥𝐹д 𝑑𝛥𝐹д
|𝐺 𝑓 | 𝑑𝑓
(6.8.1)
|𝑋 𝑡 | 𝑑𝑡
(6.8.2)
Выражение (6.8.1) позволяет определить минимальное расстояние
между двумя целями ΔRmin=cΔτразр/2 с одинаковыми ЭПР и радиальными
скоростями 𝑉 ц , при котором отраженные от них сигналы в виде
прямоугольных импульсов не пересекаются.
В
свою
очередь
выражение
(6.8.2)
позволяет
определить
минимальную разность скоростей ΔVrmin=λΔFразр/2 двух равноудаленных
целей с одинаковыми ЭПР, при которой отраженные от них сигналы с
прямоугольной
формой
спектра
комплексных
огибающих
не
пересекаются.
Для оценки разрешения по дальности и скорости в рассмотрение
обычно вводятся понятия: «эффективная энергетическая ширина спектра»
(ЭЭШС) и «эффективная энергетическая длительность сигнала» (ЭЭДС),
которые без нормировки к единичной энергии соответственно равны:
𝐹ЭФЭ
𝜏ЭФЭ
𝐺 𝑓
𝑑𝑓
𝐺 𝑓
𝑑𝑓
𝛸 𝑡
𝛸 𝑡
𝑑𝑡
𝑑𝑡
, 𝛥𝜏разр
, 𝛥𝐹разр
305
1
𝐹ЭФЭ
1
𝜏ЭФЭ
(6.9.1)
(6.9.2)
Формула (6.9.1) показывает, что постоянная разрешения по
временному запаздыванию, характеризующая разрешающую способность
РЛС по дальности, определяется ЭЭШС (FЭФЭ) и не зависит от
длительности сигнала.
Формула (6.9.2) показывает, что постоянная разрешения по частоте
Доплера, характеризующая разрешающую способность РЛС по скорости,
определяется ЭЭДС (τЭФЭ) и не зависит от ширины спектра сигнала.
Следует напомнить, что у простых импульсных сигналов с базой Б=1
длительность
и
ширина
спектра
однозначно
связаны.
Поэтому
вышеприведенные утверждения полностью справедливы только для
сложных сигналов с внутриимпульсной модуляцией при Б 1 (для простых
сигналов их отрицающая часть не имеет смысла).
Формулы
(6.9)
для
постоянных
разрешения
по
временному
запаздыванию и частоте Доплера отражают частную ситуацию, когда один
из информационных параметров у двух радиолокационных сигналов
совпадает. На практике такая идеализированная ситуация встречается
крайне редко. Обычно две разрешаемые цели имеют близкие, но не
одинаковые дальности и скорости. Поэтому в качестве совместной
постоянной разрешения по запаздыванию и доплеровской частоте Δ(τ,FД
используют соотношение:
𝛥 𝜏, 𝛥𝐹д
При 𝜒 0,0
∬ 𝜒 𝛥𝜏, 𝛥𝐹Д 𝑑𝛥𝜏𝑑𝛥𝐹д
𝜒 0,0
(6.10)
1 двойной интеграл в числителе (6.10) соответствует
некоторой площади в плоскости Δτ ΔFД (Рис. 4.43), которая равна
площади подставки основания цилиндра с единичной высотой. Поскольку
объем этого цилиндра равен объему тела неопределенности, то согласно
(4.47) имеем 𝛥 𝜏, 𝛥𝐹д
1. Поэтому для нормированных по энергии
сигналов часто говорят об «эффективной площади неопределенности».
Очевидно, что принятая постоянная совместного разрешения полностью
306
определяется выбранным видом модуляции сигнала и для простых
сигналов не может произвольно деформироваться вдоль одной из
координат (растягиваться/сжиматься) без деформации по другой оси.
Такое возможно только при использовании сложных сигналов типа ЛЧМ и
ФКМ, рассмотренных в разделе 4.
В этом смысле наблюдается полная аналогия с пространственной
ФН, т.е. ДН плоской антенны с фиксированной площадью апертуры
SА=Lx*Ly=const, о чем уже упоминалось в разделе 4. Попытка сузить луч в
одной плоскости за счет увеличения линейного размера Lх неизбежно
приведет к расширению луча в другой плоскости, так как для сохранения
величины
перехватываемой
из
пространства
энергии
приходится
уменьшить размер Ly. Поэтому постоянные разрешения по двум угловым
координатам
в
ортогональных
плоскостях
для
антенной
решетки
определяются ее площадью, так как
𝛥𝛽разр 𝛥𝜀разр
𝑘 𝑘 𝜆
,
𝐿 𝐿
(6.11)
где kx, ky – коэффициенты пропорциональности, зависящие от вида
АФР вдоль Lx и Ly соответственно.
При выводе (6.11) также использовалась аппроксимация главных
сечений ДН прямоугольниками, а максимума пространственной ДН –
параллелепипедом.
Перейдем к рассмотрению задачи «обнаружения-разрешения» без
упрощений, сделанных в данном подразделе.
307
6.2.
Оптимальное и согласованное «обнаружение –
разрешение»
Задачи оптимального и согласованного «обнаружения-разрешения»
отличаются тем, что при синтезе оптимального устройства обработки
учитываются шумы и наличие мешающего сигнала, а при согласованной
обработке
–
только
шумы.
В
подразделе
6.1
был
качественно
проанализирован только второй случай. Теперь перейдем к более сложной
задаче оптимального «обнаружения-разрешения».
Будем рассматривать ситуацию, когда в зоне обзора РЛС может
находиться несколько, в частности, две цели, которые могут иметь близкие
координаты. В отличие от подраздела 6.1, статистическую задачу
разрешения теперь сформулируем как раздельное обнаружение сигналов с
заданными ВПО D и ВЛТ F, т.е. как задачу обнаружения – разрешения с
учетом показателей качества ее решения. При этом цели должны
поочередно выступать как полезные или мешающие. Так, для двухцелевого
варианта проверяются гипотезы наличия или отсутствия одной цели при
мешающем влиянии второй цели.
Положим, что в зоне обзора РЛС с антенной решеткой находятся две
цели
в
общем
случае
с
разными
частотно-временными
и
пространственными координатами. Полезный когерентный (отраженный,
например, от первой цели) сигнал 𝑿 𝑡, 𝜶
векторный параметр 𝜶
𝜏 , 𝐹д , Ѳ
Т
имеет информативный
. Помеха представляет собой
аддитивную смесь внутреннего белого шума со спектральной плотностью
мощности N0 и мешающего (отраженного от второй цели) сигнала со
случайной комплексной амплитудой |𝐵 |𝜲 𝑡, 𝜶 𝑒
модуляции как у полезного сигнала, но при 𝜶𝟐
и тем же законом
𝜏 , 𝐹д , Ѳ
Т
. Гауссовское
распределение мгновенных значений мешающего сигнала обеспечивается
равномерным распределением его начальной фазы 𝛽 в пределах от 0 до
308
2π
и
рэлеевским
распределением
амплитудного
множителя
BM
(см. раздел 3).
Поскольку
внутренний
шум
и
мешающий
сигнал
взаимно
независимы, корреляционная матрица-функция помехи представляется в
виде суммы корреляционных матриц-функций внутреннего белого шума и
мешающего сигнала:
𝜱 𝑡, 𝑠
𝑁𝛿 𝑡
1
𝐵 𝑋 𝑡, 𝜶𝟐 𝑒
𝐵М 𝑋 𝑠, 𝜶𝟐 𝑒
2 М
1
𝑠 𝑰
𝑋 𝑡, 𝜶𝟏 𝑋 ∗ 𝑠, 𝜶𝟐
2
𝑠 𝑰
𝑀
𝑁𝛿 𝑡
∗
(6.12)
В (6.12) учтено, что M[𝐵 ]=1, т.е. мешающий сигнал отнормирован
к единичной средней мощности. Для этих условий синтезируем и
проанализируем устройство статистически оптимального «обнаружения –
разрешения» для этого случая.
Подставим (6.12) в интегрально-матричное уравнение (5.42) и после
преобразований, приведенных в Приложении 10, получим выражение для
оптимального весового вектора 𝑹(t), который с учетом наличия
мешающего сигнала, принимает вид
𝑹 𝑡
2
𝑁
𝐻𝐻
𝜌 𝜶 , 𝜶 𝑋 𝑡, 𝜶𝟐
1 𝐻
𝑋 𝑡, 𝜶
(6.13)
Здесь H1=Э1/N0, H2=Э2/N0 – относительные (по отношению к шуму)
интенсивности полезного и мешающего сигналов; Э1, Э2– энергии
полезного и мешающего сигналов.
Важно, что в (6.13) входит нормированная взаимная корреляционная
функция
комплексных
амплитуд
полезного
и
мешающего
пространственно-временных сигналов, которая имеет вид
𝜌 𝜶 ,𝜶
1
2 Э Э
𝑋 𝑡, 𝜶𝟏 𝑋 ∗ 𝑡, 𝜶𝟐 𝑑𝑡
Модуль этой многомерный функции 𝜌 𝜶 , 𝜶
(6.14)
характеризует степень
различия параметров (времени запаздывания, доплеровской частоты,
309
углового направления) полезного и мешающего сигналов. Если параметры
сигналов полностью совпадают, т.е. α1 α2, то |𝜌 𝛼1, 𝛼2 |
1. При каждой
паре фиксированных значений α1 и α2 взаимная корреляционная функция
|𝜌 𝜶 , 𝜶 | равна коэффициенту корреляции комплексных амплитуд
полезного и мешающего сигналов (см.6.14). Согласно определениям,
приведенным в разделе 4, модуль коэффициента корреляции |𝜌 𝜶 , 𝜶 |
зависит от разности 𝛥𝜶
𝜶
𝜶 , и поэтому может рассматриваться как
многомерная ФН сигнала x(t). Если Э
Э , то |𝜌 𝛼 𝛼 |
𝜒 𝛼 𝛼
на
выходе амплитудного детектора после СФ.
Подставляя выражение (6.13) для весового вектора 𝑹(t) в (5.45)
можно получить выражение для модуля комплексного весового интеграла
𝑍 , который здесь выступает в качестве достаточной статистики при
оптимальном «обнаружении – разрешении». Выбор весового вектора в
соответствии с (6.13) указывает на то, что при оптимальном «обнаружении
– разрешении» меньший вес придается той части сигнала, которая
подвержена наибольшему помеховому воздействию.
Параметр «обнаружения – разрешения» (отношение сигнал/помеха)
q2 при такой обработке определяется путем подстановки (6.13) в (5.44). В
результате при H1 = H2 имеем
𝑞
где 𝑞
𝑞
|𝜌 𝜶 , 𝜶 | ,
1
(6.15)
2Э /𝑁 – отношение сигнал/помеха при отсутствии мешающего
сигнала. В свою очередь коэффициент использования энергии КЭ будет
равен
𝐾Э
𝑞
𝑞
1
𝐻
1
𝐻
|𝜌 𝜶 , 𝜶 | ,
(6.16)
а при H2≫1, т.е. при большой интенсивности мешающего сигнала,
получим:
𝐾Э
1
|𝜌 𝜶 , 𝜶 |
310
(6.17)
Таким
образом,
согласно
(6.15)
–
(6.17)
эффективность
оптимального обнаружения-разрешения зависит от степени различия
параметров полезного и мешающего сигналов (|𝜌 𝜶 , 𝜶 |
больше
эти
различия
эффективность
мешающего
(меньше
обработки.
сигнала
значения
Если
велика,
( |𝜌 𝜶 , 𝜶 | ,
относительная
то
𝜌 𝛥𝜶 ). Чем
согласно
тем
выше
интенсивность
(6.16)
коэффициент
использования энергии KЭ (см. (6.17)) практически от нее не зависит. Это
означает, что в этой ситуации шумами можно пренебречь, и при α1→α2
имеем КЭ→0, т.е. при Н2≫Н1 помеха полностью подавляет полезный
сигнал, так как между ними отсутствуют различия.
Рассмотрим важную для радиолокации ситуацию, когда два сигнала
воздействуют
на
РЛС
с
М-элементной
антенной
решеткой
с
эквидистантным шагом d. При выполнении условия (5.46) комплексные
амплитуды X(t, α1) полезного (первого) и мешающего 𝑋(t, α2) (второго)
сигналов
факторизуются
на
пространственный
𝛼пр
и
частотно-
временной 𝜶вр сомножители. Условия, определяющие возможность такой
факторизации, показаны в Приложении 6.
𝑿 𝑡, 𝜶
где 𝛼
𝑿 𝛼
𝑿 𝑡, 𝜶в
,
𝑖
1,2
(6.18)
𝑠𝑖𝑛 Ѳ – пространственный (угловой) параметр для i-го
Полезный
сигнал
Мешающий
сигнал
сигнала в линейной АР с шагом d, 𝜶вр
𝛥𝜏з , 𝛥𝐹Д
(i ∊ 1, 2)
– время-частотные параметры i-го
сигнала.
Энергии
сигналов
соответственно равны: Э1=МЭ01, Э2=МЭ02, где
Рис. 6.4 Воздействие
полезного и мешающего
сигналов с разных угловых
направлений
Э0i– энергия i-го сигнала в одном элементе АР.
Тогда взаимную корреляционную функцию
(6.14) можно представить следующим образом:
311
𝑿∗ 𝛼
𝑀
𝑿 𝛼
𝜌 𝜶 ,𝜶
1
𝑿∗ 𝑡, 𝜶вр 𝑑𝑡
𝑿 𝑡, 𝜶вр
2 Э Э
(6.19)
Нетрудно заметить, что интеграл в (6.19) представляет собой
‖0,0‖ и 𝛼вр
функцию рассогласования, а если принять: 𝛼вр
𝛥𝜏, 𝛥𝐹д ,
то он будет определять стационарную ФН – (Δα).
Предположим, что все параметры полезного и мешающего сигналов,
за исключением углового параметра (рис.6.5), совпадают, т.е. Э01 Э02, но
αпр1 αпр2 Ѳ1 Ѳ2 .
В этом случае равенство (6.19) преобразуется к виду
𝑿∗ 𝛼
𝑀
𝑿 𝛼
𝜌 𝛼 ,𝛼
(6.20)
Введем обозначения: h=Э0/N0 – ОСШ в одном элементе АР,
H2=H1=MЭ0/N0=Mh – ОСШ на выходе АР, k=Mh(1+Mh),а также полагая
𝑋 𝑡, 𝜶вр
𝑋 𝑡 и подставляя (6.18) и (6.20) в (6.13), получим
R(t, αnp)=R(t)R(αnp)
факторизованный
пространственно-временной
вектор (6.21)
обработки,
R(t)=2𝑋(t)/N0
(6.22)
весовой вектор временной обработки,
𝑹 𝛼
𝑋 𝛼
𝑘𝜌∗ 𝛼
,𝛼
𝑋 𝛼
(6.23)
весовой пространственный вектор обработки
Соотношение (6.23) с точностью до обозначений α1=αц, α2=νп,
совпадает с (5.76), что означает 𝜌∗ 𝛼 , 𝛼
соотношение
(6.22)
рассматриваемого
совпадает
примера
с
(5.61).
структура
𝜌∗ П 𝛼ц , 𝜈п . При этом
Это
означает,
устройства
что
для
оптимального
«обнаружения-разрешения» соответствует структуре, показанной на Рис.
5.18. Следовательно, как при воздействии шумовой помехи, так и при
воздействии мешающего сигнала, имеющего временную структуру
полезного сигнала, оптимальная процедура требует его подавления
312
(компенсации). В обоих случаях в результирующей (оптимальной)
диаграмме направленности создаются провалы (Рис. 5.23). Формирование
провала может сопровождаться частичным ослаблением полезного
сигнала, что уменьшает величину отношения сигнал/помеха q2 по
сравнению со случаем отсутствия мешающего сигнала (см. также формулы
(5.77), (5.79)):
𝑞
𝑞
1
𝑀ℎ 𝒙 𝛼
1 𝑀ℎ
𝑞
𝐾Э
𝑞
𝑞
1
1
𝒙∗ 𝛼
𝑀
𝑀ℎ
𝜌 𝛼
1 𝑀ℎ
𝑀ℎ
𝜌 𝛼
1 𝑀ℎ
(6.24)
,𝛼
,𝛼
(6.25)
Здесь коэффициент корреляции ρ(α1, α2) можно рассматривать как
ДН (пространственную ФН), так как временная огибающая у обоих
сигналов одинаковая.
Если полезный сигнал воздействует по главному лучу, а мешающий
– по боковому лепестку ДН АР, то коэффициент использования энергии
стремится к единице (KЭ 1) (Рис. 5.24), так как мешающий сигнал будет
существенно ослаблен. В этом случае наличие второй цели практически не
влияет на показатели качества обнаружения первой цели. Это утверждение
тем точнее, чем ниже уровень боковых лепестков ДН.
При малых угловых различиях между целями, т.е. при воздействии
полезного и мешающего сигналов по главному лучу ДН, коэффициент
использования энергии KЭ 1. Для этого случая, используя соотношения
(6.24) и (6.25), можно определить минимальное угловое расстояние 𝛼
|𝛼1
𝛼2| между двумя целями, при котором обеспечиваются требуемые
показатели качества обнаружения D и F одной цели при мешающем
влиянии второй цели. На Рис. 6.5 показаны зависимости параметра
обнаружения q2 (в децибелах), от величины 𝛼 для заданных значений ВПО
D (0,5 и 0,9) и ВЛТ F (10-4, 10-6, 10-8). Величина 𝛼 выражена в долях
313
полуширины ДН линейной эквидистантной АР вида |𝑠𝑖𝑛𝑥⁄𝑥 | по нулевому
уровню. Как видно из Рис. 6.5 при уменьшении величины 𝛼 из-за
ослабления
полезного
сигнала
при
компенсации
мешающего
для
обеспечения заданных D и F требуется большая энергия зондирующего
сигналаю.
Например, при D=0,5 и F=10-6 при разносе двух сигналов со
случайными фазой и амплитудой на 0,1 полуширины луча ( 𝛼 =10-1)
требуемое ОСШ для обнаружения полезного сигнала составляет ~30 дБ, а
при 𝛼 =1 – примерно 18 дБ. Аналогично, для того, чтобы обнаруживать
полезный сигнал при тех же пространственных разносах с мешающим, но
для D=0,9 и F=10-6, требуемые ОСШ составляют 39 дБ и 26 дБ
соответственно.
При разносе направлений на полную ширину лучей (𝛼 =2), т.е.
фактически при переходе к рэлеевскому разрешению требуемые ОСШ
будут соответствовать кривым обнаружения на рис 3.16 и составлять 14 дБ
при D=0,5 (F=10-6) и 19,5 дБ при D=0,9 (F=10-6).
Используя соотношения (6.13) и (6.14), можно синтезировать
устройства
оптимального
«обнаружения–разрешения»
при
наличии
различий между полезным и мешающим сигналами и по другим
параметрам. Например, в случае частотных (скоростных) различий при
оптимальном обнаружении-разрешении провалы создаются в частотных
характеристиках устройств обработки, например в ГФН (см. подраздел
5.9). Для анализа параметров обнаружения и коэффициента использования
энергии
в
рассмтриваемом
случае
соотношениями (6.15) и (6.16).
314
следует
воспользоваться
q2, дБ
70
F=10‐8
D=0.9
60
F=10‐6
50
F=10‐4
40
D=0.5
30
20
10
10‐2
100 Δα
10‐1
Рис. 6.5. Рис. Зависимость параметра обнаружения от углового разноса
между двумя целями для заданных D и F
Итак, под оптимальным разрешением можно понимать значение
минимального интервала Δα вектора информационных параметров двух
целей,
при
котором
первая
цель
обнаруживается
с
заданными
показателями качества D (ВПО) и F (ВЛТ) при компенсации второй цели
как помехи. Поэтому две цели считаются оптимально разрешенными,
если потери ОСП при обнаружении первой цели, обусловленные
компенсацией второй цели, все еще позволяют обнаруживать первую цель
с заданными показателями качества. Естественно, при сближении целей по
любому скалярному параметру α потери ОСП возрастают.
Перейдем
теперь
к
понятию
согласованное
«обнаружение-
разрешение».
В этом случае при синтезе устройства согласованного «обнаруженияразрешения» наличие мешающих (отраженных от мешающих целей)
сигналов не учитывают. Поэтому корреляционную матрицу-функцию
помехи (только внутреннего белого шума) записывают в виде (см.(5.50)),
т.е. 𝜱 𝑡
𝑠
𝑁 𝑰𝛿 𝑡
𝑠 .
После решения интегрально-матричного уравнения (5.42) выражение
для
временного
Следовательно,
весового
вектора
примет
структура устройства
315
вид
𝑹 𝑡
𝑋 𝜶 .
согласованного обнаружения-
разрешения соответствует структуре, показанной на Рис. 5.12, где
операция компенсации мешающих сигналов отсутствует.
Опять рассмотрим двухцелевую ситуацию и определим мощности
сигнала и помехи (внутренний шум + мешающий сигнал) на выходе
устройства
согласованной
обработки.
Выражение
для
отношения
сигнал/помеха (параметра согласованного «обнаружения-разрешения»)
определяется формулой:
𝑞
𝑞
1
𝐻 𝜌 𝛼
(6.26)
,𝛼
В свою очередь коэффициент использования энергии KЭ равен
𝐾Э
𝑞
𝑞
1
1
𝐻 𝜌 𝛼
(6.27)
,𝛼
При согласованном обнаружении-разрешении величины q2 и KЭ
зависят не только от значения модуля взаимной корреляционной функции
полезного и мешающего сигналов 𝜌 𝛼
,𝛼
, но и от относительной
интенсивности мешающего сигнала Н2. Физически это очевидно, так как
мешающий сигнал (помеха) не компенсируется. В связи с этим при малых
различиях
параметров
полезного
и
мешающего
сигналов
при
согласованном «обнаружении-разрешении» реализуются более низкие
показатели качества по сравнению с оптимальным. При больших
различиях указанных параметров приближенно имеем 𝜌 𝛼
0, а следовательно, 𝐾Э
1, т.е.
показатели
качества
,𝛼
становятся
практически одинаковыми при оптимальной и согласованной обработках.
Если рассматривать функцию корреляции 𝜌 𝛼 , 𝛼
как частотно-
временную ФН или пространственную ДН, то согласованное разрешение
согласно (6.26) и (6.27) тем эффективней, чем уже главные максимумы
этих функций и чем быстрее их спадание при увеличении рассогласования
по соответствующему параметру α, что было качественно показано для
этого случая в подразделе 6.1.
316
6.3.
Методы и показатели качества радиолокационных
измерений.
6.3.1. Статистические подходы к оптимизации измерений
координат целей.
Задача
измерения(оценки)координат
целей
решается
в
предположении, что цель обнаружена и разрешена, т.е. по принятой
реализации цель идентифицирована. Из эмпирических соображений
понятно, что погрешности измерений 𝜏,𝐹д и угла θ зависят от остроты
пиков частотно-временной ФН 𝜒 𝜏, 𝐹д
и пространственной ДН. В
частности, главные сечения ФН 𝜒 𝜏, 0 и 𝜒 0, 𝐹д определяют точность
раздельных измерений этих параметров в ситуациях, когда один из них
точно известен. При этом трехмерная ФН 𝜒 𝜏, 𝐹д определяет точность
совместных измерений дальности Rц и скорости 𝑉 цели, а от УБЛ ФН
зависит качество измерений при наличии мешающих сигналов (см.
подразделы 6.1 и 6.2) и помех. Те же самые рассуждения о необходимости
остроты пика и низкого УБЛ касаются и ДН, «отвечающей» за точность
измерений угловых координат.
В теории измерений обычно полагают, что ФН являются четными,
стационарными
функциями,
значения
которых
определяются
не
абсолютными значениями координат, а только сдвигами 𝜏 и 𝐹д
относительно точки оценки 𝜏 и 𝐹д . Обычно полагают: 𝜏
0 и 𝐹д
0, и
поэтому в дальнейшем рассогласование по координатам будем обозначать
𝜏 и 𝐹д вместо ∆𝜏 и ∆𝐹д , как было принято при определении ФН в разделе 4.
В реальных условиях работы РЛС, когда ОСШ ограничено, сигналы
флюктуируют и воздействуют помехи, ошибки измерения координат
неизбежны, а их вероятностные характеристики вычисляются на основе
статистической теории. Ошибку оценивания К-мерного векторного
параметра 𝜶, равную 𝜹𝜶
𝜶𝟎
𝜶, где 𝜶𝟎 – истинное значение, а 𝜶 – его
317
оценка,
которую
обычно
характеризуют
плотностей вероятности: 𝑝 𝜹 ⁄𝜶
двумя
видами
условных
и 𝑝 𝜹 ⁄𝜶 . Они определяют качество
точечных оценок. Интервальные оценки, характеризующие вероятность
попадания оценки в интервал 𝚫𝜶, могут быть получены как обобщение
точечных и отдельно не рассматриваются.
В теории оценивания, как правило, считают, что систематические
ошибки устранены, и используют два непротиворечащих друг другу
подхода – классический (небайессовский) и байессовский. На их основе
определяются статистические характеристики оценивания.
Классический
подход
характеризуется
тем,
что
измеряемый
параметр𝜶𝟎 считается неслучайным, но неизвестным. Для получения
оценок 𝜶 используют значащие для практики эмпирические критерии.
Такими критериями являются:
- состоятельность оценки 𝜶, означающая её сходимость по
вероятности к истинному значению 𝜶𝟎 по мере роста числа испытаний (N)
lim 𝜶
→
𝜶
→0
- несмещенность оценки, означающая равенство 𝑀 𝜶
𝜶𝟎
𝟎;
- эффективность оценки, означающая минимизацию её дисперсии
𝜎 𝜹
𝑚𝑖𝑛, даже если оценка оказывается смещенной;
При байессовском подходе параметр 𝜶 полагается случайной
величиной с известной доопытной (априорной) ПВ – 𝑝 𝜶 . Как и в теории
обнаружения, оценка 𝜶 формируется по принятой реализации y, а выбор
𝑝 𝜶 , как правило, осуществляется исходя из предыдущего опыта работы
и условия решаемой задачи. Например, 𝑝 𝐹д
может определяться
интервалом допустимых и наиболее вероятных значений радиальных
скоростей целей: 𝑉
𝜆𝐹д /2. Если априори нельзя отдать предпочтение
никаким значениям скоростей, то закон 𝑝 𝐹д
интервале: 2𝑉
/𝜆
𝐹д
2𝑉
/𝜆.
318
будет равносильным на
Следует отметить, что применение на практике указанных подходов
часто приводит к одинаковым результатам, но они могут существенно
различаться при малом объеме входных данных.
𝑝 𝛼
𝑝 𝛼
𝛼0
𝛼
𝛼0
а
𝛼
б
Рис. 6.6. ПВ при байесовском (а) и классическом (б) подходах.
Сходство результатов, полученных применением обеих теорий
можно объяснить следующим образом. В пределе для параметра 𝛼 при
байессовском подходе и для оценки 𝛼 при классическом подходе имеют
место следующие плотности вероятностей:
- в байессовском случае – гауссовское распределение оцениваемого
параметра 𝜶 вокруг оценки 𝜶 (см. Рис. 6.6а);
- в небайессовском случае – гауссовское распределение оценки 𝜶
вокруг оцениваемого параметра α0 (см. Рис. 6.6б).
Подобный дуализм и приводит к одинаковым результатам, если
априорная ПВ информация 𝑝 𝜶
𝑐𝑜𝑛𝑠𝑡, т.е. доопытная информация
отсутствует.
Расхождения в результатах оценивания связаны с тем, что при
классическом подходе выбор критерия носит субъективный характер, а
при байессовском подходе произвольно выбирается априорная ПВ 𝑝 𝜶 .
Поэтому выбор того или иного критерия ситуационен, а при 𝑝 𝜶
байесовский подход переходит в классический.
319
𝑐𝑜𝑛𝑠𝑡
6.3.2. Оптимизация оценок по критерию минимума среднего
риска.
В общем виде безусловный средний риск ошибок измерений
вычисляется путем интегрирования совместной ПВ 𝑝 𝜶, 𝜶 параметра 𝜶 и
его оценки 𝜶 по всему диапазону возможных значений
𝑟ср
П 𝜶, 𝜶 𝑝 𝜶, 𝜶 𝑑𝜶𝑑𝒂
(6.28)
где П 𝜶, 𝜶 – функция стоимости ошибок, которая определяет плату за
ошибку в конкретной ситуации 𝜶, 𝜶 , т.е., когда параметру 𝜶 дается
оценка 𝜶.
Формула (6.28) является аналогом выражения (3.4) для среднего
риска ошибок в теории обнаружения, но из-за того, что 𝜶 является
непрерывным
параметром,
здесь
суммирование
заменено
интегрированием. Выбор оценки 𝜶 аналогичен выбору решающей функции
А (y) в (3.16) и сводится к минимизации 𝑟ср , как стратегии решения
статистических задач.
Важнейшее значение в байессовской теории измерений имеет
послеопытная (апостериорная) ПВ 𝑝 𝜶/𝒚 . Эта ПВ должна вычисляться по
принятой реализации y, в которой содержится обнаруженный сигнал с
параметром
𝜶.
Совместную
плотность
этих
случайных
величин
представим через формулу полной вероятности.
𝑝 𝜶, 𝒚
𝑝 𝒚 𝑝 𝜶/𝒚
𝑝 𝜶 𝑝 𝒚/𝜶
(6.29)
Тогда условная послеопытная ПВ представляется соотношением
𝑝 𝜶/𝒚
𝑝 𝜶 𝑝 𝒚/𝜶
𝑝 𝒚
Введем условие нормировки:
𝑝 𝜶/𝒚 𝑑𝜶
(6.30)
1, указывающее на то,
что в реализации y с единичной вероятностью обязательно содержится
одно из возможных значений параметра 𝜶. Тогда интегрируя обе части
320
(6.30) по 𝜶, имеем: 𝑝 𝒚
𝑝 𝜶 𝑝 𝒚/𝜶 𝑑𝜶, и с учетом этого для
послеопытной условной ПВ получим
𝒑 𝜶/𝒚
𝑝 𝜶 𝑝 𝒚/𝜶
(6.31)
𝑝 𝜶 𝑝 𝒚/𝜶 𝑑𝜶
Формула (6.31) отражает связь послеопытной ПВ с доопытной ПВ
p(𝜶) и условной ПВ 𝑝 𝒚/𝜶 при фиксированных значениях координат
вектора 𝜶
𝜶𝟎 . Знаменатель формулы (6.31) представляет собой число, не
зависящее от значения 𝛂 и удовлетворяющее условию введенной
нормировки.
Для одномерной скалярной ситуации α
α
формулу (6.31)
иллюстрирует Рис. 6.7. На этом рисунке пологая, близкая к равномерной,
функция 𝑝 𝛼
отражает недостаточную априорную информацию о
параметре α. Функция 𝑝 𝒚/α является функцией правдоподобия, острота
максимума которой существенно уточняет информацию об измеряемом
параметре.
𝑝
𝑝 𝒚/𝛼
𝑝 𝛼/𝒚
𝑝 𝛼
𝛼
α
Рис. 6.7. Априорная ПВ-𝑝 𝛼 , послеопытная ПВ 𝑝 𝛼/𝑦 функция
правдоподобия 𝑝 𝑦/𝛼
Эта функция отражает условную ПВ реализации y в зависимости от
параметра 𝛼 . Еще более узкий пик имеет функция послеопытной ПВ
𝑝 α/𝒚 , так как учитывает и функцию правдоподобия и априорную
информацию.
Это
объясняет
сдвиг
321
максимума
функции
𝑝 𝛼/𝒚
относительно максимума 𝑝 𝒚/α в сторону более вероятных априорных
значений α.
Логика этой операции объясняется тем, что в ситуации, когда
получена априорно маловероятная оценка, противоречащая априорной
информации, ее «сдвигают» в сторону более вероятных значений.
Заметим, что байесовским подходом мы часто пользуемся в повседневной
жизни. Представим себе ситуацию. Мы хотим узнать, какая температура на улице не
пользуясь поверенным по эталону прибором – измерительным термометром.
Выйдя на улицу, в течение некоторого времени по ощущениям мы даем оценку
температуре, т.е. получаем послеопытную ПВ. Допустим, что мы оценили температуру
в интервале от минус 12 до минус 18 градусов по Цельсию, а на улице весна. Из
жизненного опыта мы владеем априорной информацией о том, что в это время года
температура с 80% вероятностью не бывает ниже минус 12˚С. Непроизвольно
пользуясь байесовским подходом мы смещаем свою оценку в сторону нижнего края,
ближе к минус 12˚С. Этот подход и иллюстрирует Рис. 6.7.
В отсутствие априорной информации, когда 𝑝 𝛼
𝑐𝑜𝑛𝑠𝑡 кривые
функции правдоподобия 𝑝 𝒚/𝛼 и послеопытной ПВ 𝑝 𝛼/𝒚 совпадают и
никакого уточнения информации не происходит.
В радиолокации, в первую очередь, в РЛС обнаружения, информация
о дальности, скорости и угловых координатах, как правило, равновероятна
в заданной зоне. В этой ситуации можно считать 𝑝 𝛂/𝒚
𝑝 𝒚/𝛂 , и
поэтому можно отметить сходство операций обнаружения и измерения,
основанных на обработке реализации y. Для выявления этого сходства,
запишем аналогичное (3.17) условное отношение правдоподобия.
𝑙 𝒚/𝜶
𝑝сп 𝒚/𝜶 /𝑝п 𝒚
(6.32)
Как и в теории обнаружения, отношение правдоподобия (6.32)
представляет собой отношение двух ПВ реализации y. ПВ числителя
отражает наличие в реализации yполезного сигнала с параметром 𝜶, а ПВ
в знаменателе, соответствует реализации, в которой есть только помеха.
Сравнение (6.30) и (6.31) с (6.32) указывает на то, что послеопытная ПВ
𝑝 𝜶/𝒚 пропорциональна условному отношению правдоподобия 𝑙 𝒚/𝜶 .
𝑝 𝜶/𝒚
С 𝑝 𝜶 𝑙 𝒚/𝜶 ,
322
(6.33)
где С
𝑝 𝜶 𝑙 𝒚/𝜶 𝑑𝜶 – нормирующий коэффициент, не зависящий от
𝜶. Логарифмируя обе части (6.33) приходим к соотношению
𝑙𝑛 𝜶/𝒚
𝑙𝑛 𝑝 𝜶
𝑙𝑛 𝑙 𝒚/𝛼
𝑐𝑜𝑛𝑠𝑡
(6.34)
Из этого выражения следует, что для получения оценки 𝜶 можно
воспользоваться операциями вычисления отношения правдоподобия,
которые применяются в радиолокационных обнаружителях. Поэтому для
радиолокационных измерителей пригодны те же алгоритмы и устройства
оптимальной обработки (корреляторы, согласованные фильтры и т.д.). В
связи с этим наличие отдельного измерительного приемного канала в РЛС
не требуется. Таким образом, формула (6.32) указывает не только на
правдоподобность наличия сигнала с параметром 𝜶 в принятой реализации
y, но и позволяет сопоставить правдоподобность гипотез о наличии в y
сигналов
с
различными
значениями
𝜶.
параметра
Этот
факт
свидетельствует о связи послеопытной ПВ 𝝆 𝜶/𝒚 с ФН, также зависящей
от значения параметра 𝜶 и его рассогласования относительно ожидаемого
значения.
Согласно (6.28) оптимизация оценок 𝜶 по критерию минимума
среднего
риска
зависит
от
выбора
функции
стоимости
𝑟 𝜶, 𝜶 ,
подлежащую определению. Простая функция стоимости для скалярного
параметра 𝑟 𝛼 , 𝛼
что
за
𝛿 𝛼
правильную
𝛼
оценку
изображена на Рис. 6.8а. Она показывает,
𝛼
параметра
дается
«поощрение»,
реализованное в виде отрицательного штрафа. Используя фильтрующие
свойства 𝛿 -функции, из (6.28) при 𝑝 𝛼
𝑐𝑜𝑛𝑠𝑡 получим следующий
критерий
𝑝 𝛼/𝒚
max при 𝛼
𝛼
Согласно (6.35) оптимальная оценка 𝛼
(6.35)
параметра 𝛼 соответствует
максимуму функции послеопытной ПВ.
В
теории
и
на
практике
наиболее
широко
квадратичная функция стоимости ошибок 𝑟 𝛼 , 𝛼
323
𝛼
распространена
𝛼
(см. Рис.
6.8б). Она показывает, что по мере возрастания ошибки, «плата» за нее
возрастает по закону параболы.
𝑍 𝛼, 𝛼
𝑍 𝛼, 𝛼
𝛼 ̂, 𝛼
𝛼
2
𝛼
𝛼
𝛼
𝛿 𝛼, 𝛼
а
б
Рис. 6.8. Простая (а) и квадратичная (б) функции стоимости ошибок для
скалярного параметра
Продифференцируем (6.28) по оценке 𝛼 , и, приравняв нулю
производную, найдём оценку 𝜶
, минимизирующую средний риск для
этого случая
𝑑
𝑑𝜶
𝜶
𝜶 𝑝 𝜶⁄𝒚 𝑑𝛼
2
𝜶 𝑝 𝜶⁄𝒚 𝑑𝛼
𝜶
(6.36)
2𝜶
𝑝 𝜶⁄𝒚 𝑑𝜶
2
𝜶𝑝 𝜶⁄𝒚 𝑑𝜶
0
По условию нормировки первый интеграл в формуле (6.36) равен 1.
Поэтому оптимальная оценка вычисляется из соотношения
𝜶
𝜶𝑝 𝜶/𝒚 𝑑𝜶
(6.37)
Формулу (6.37) можно рассматривать, как первый момент функции
послеопытной ПВ, а оптимальная оценка параметра 𝜶 соответствует
координате «центра тяжести» фигуры, образованной этой функцией. Если
послеопытная ПВ имеет единственную симметричную моду (максимум),
324
то координата «центра тяжести» совпадает с координатой максимума этой
функции.
Применим полученный результат к случаю регулярных измерений
скалярного параметра 𝛼 в отсутствии априорных данных. Под регулярным
в литературе обычно понимается измерение, для которого логарифм
функции правдоподобия ln 𝑙 𝒚/𝜶 является дважды дифференцируемой
функцией, отвечающей условиям симметричности и единственности
максимума. Этим условиям соответствуют и частотно-временные ФН, и
пространственные ДН. Регулярные радиолокационные измерения обычно
проводятся при высоком значении ОСШ на выходе обнаружителя
полезного сигнала. (𝑞 ≫ 1). Поэтому на практике рубежи этапа измерений
примерно на 20% - 30% ниже, чем рубежи обнаружения. Когда какое-либо
из вышеназванных условий не выполняется, то такие измерения называют
аномальными, и здесь не рассматриваются.
Выше было доказано, что оптимальная оценка 𝛼
скалярного
параметра 𝛼 соответствует координате максимума послеопытной ПВ и,
следовательно, может быть получена из условия
𝑑𝑝 𝛼/𝒚 /𝑑𝛼
0 при 𝛼
𝛼
В отсутствие априорных данных условную ПВ 𝑝 𝛼/𝒚
(6.38)
можно
заменить на пропорциональную ей функцию правдоподобия 𝑝 𝒚/𝛼 (см.
6.33) или логарифм отношения правдоподобия 𝑙𝑛 𝑙 𝒚/𝛼 . Поэтому от (6.38)
можно перейти к условию максимума правдоподобия (МП)
𝑑 ln 𝑙 𝒚/𝛼 /𝑑𝛼
0 при 𝛼
𝛼
(6.39)
Такая оценка в литературе получила название оценка максимального
правдоподобия (ОМП).
В рассматриваемых условиях на основе (6.38) и (6.39) можно
утверждать, что оценка параметра 𝛼 при регулярных измерениях
фактически сводится к оценке координаты максимума выходного
напряжения приемника-обнаружителя для принятой реализации y. При
325
отсутствии априорных данных, когда 𝑝 𝜶
𝑐𝑜𝑛𝑠𝑡, оценки, полученные на
основе байессовского подхода и ОМП, количественно совпадают в
условиях регулярных измерений.
6.3.3. Показатели качества регулярных измерений
(корреляционная матрица ошибок).
Перейдем
к
анализу
точностных
характеристик
регулярных
измерений, которые определяются степенью «размытости» послеопытной
ПВ в окрестности точки оценки 𝛼 . Ранее формулами (6.38) и (6.39) была
доказана эквивалентность послеопытной ПВ и отношения правдоподобия
при получении оптимальной оценки параметра 𝜶. Перейдя обратно от
скалярного параметра 𝛼 к векторному 𝜶, перепишем соотношение (6.33) в
виде
𝑝 𝜶/𝒚
𝒚/𝜶
С 𝑒
(6.40)
В окрестности точки оптимальной оценки по критерию минимума
среднего риска логарифм отношения правдоподобия, можно разложить в
ряд Тейлора, ограничиваясь нулевым, первым и вторым членами
разложения
(полином
второй
степени).
Поскольку
по
условию
регулярности ln 𝒚/𝜶 является четной функцией, её первые производные
по параметрам равны нулю. Тогда логарифм отношения правдоподобия
можно аппроксимировать квадратичной формой
𝑙𝑛 𝑙 𝒚/𝜶
1
2
𝛼
𝛼
𝛼
𝛼
,
𝜕
𝑙𝑛𝑙 𝒚/𝜶
𝜕𝛼 𝜕𝛼
(6.41)
Здесь и далее для ОМП используется дополнительный индекс y,
показывающий, что оценка получена на основе реализации y.
Формула
(6.41)
показывает,
что
логарифм
отношения
правдоподобия, а, следовательно, пропорциональная ему послеопытная
ПВ, выражаются через вторые производные по каждому параметру 𝛼 (k =
0,1…K), а также через смешанные производные, указывающие на
взаимную корреляцию i-го и j-го параметров.
326
Согласно
множителя С
(6.40)
с
точностью
до
постоянного
от логарифма отношения правдоподобия можно перейти
к послеопытной ПВ. Эту ПВ часто представляют в векторно-матричной
записи
канонической
формы
многомерного
нормального
закона
распределения случайных значений измеряемого параметра 𝜶 (см.
Приложение 2).
𝑝 𝜶/𝒚
2𝜋
где 𝑾
/
𝑑𝑒𝑡𝑾 𝑒𝑥𝑝
𝑤
𝜶
𝜶𝒚 𝑾 𝜶
ln 𝑙 𝒚/𝜶𝒚
,
𝜶𝒚 ,
(6.42)
– симметричная K×K –
мерная матрица, 𝑑𝑒𝑡𝑾 – определитель матрицы 𝑾 .
Логарифм отношения правдоподобия также будет выражаться через
матрицу 𝑾
1
𝜶
2
ln 𝑙 𝒚/𝜶
В литературе 𝑾
𝜶𝒚 𝑾 𝜶
(6.43)
𝜶𝒚
обычно называют обратной корреляционной
матрицей ошибок или матрицей точности. Матрица 𝑾 , обратная
матрице
точности,
называется
корреляционной
матрицей
ошибок
измерений. Согласно (6.40 и 6.43) она равна
𝜶
𝜶𝒚 𝜶
𝜶𝒚
𝑝 𝜶/𝒚 𝑑𝜶
𝑾
(6.44)
𝜶
Свое название матрица 𝑾
получила потому, что дисперсии ошибок
измерений компонент вектора 𝜶 представляют собой её диагональные
элементы. Для их вычисления вначале необходимо определить матрицу
точности 𝑾 , а затем ее обратить.
Несколько забегая вперед, отметим, что вышеприведенную матрицу
точности 𝑾 в современной литературе часто называют информационной
матрицей Фишера, хотя она получена исходя из иных предпосылок.
В
отечественной
литературе
чаще
пользуются
обратной
корреляционной матрицей ошибок, в зарубежной – информационной
327
матрицей Фишера, которая будет определена и объяснена в следующем
подразделе.
6.3.4. Потенциальные точности оценивания параметров
(граница Крамера-Рао).
Выше
отмечалось,
что
в
байессовской
теории
оценивания
важнейшим является допущение о том, что априорная ПВ измеряемых
параметров известна из предыдущего опыта. Этот факт затрудняет
применение байессовского подхода в реальных условиях работы РЛС, а во
многих ситуациях делает его невозможным. Кроме того, критерий
минимума среднего риска также трудно применим для практических
расчетов.
Радикальным способом преодоления этих трудностей является
переход к критериям, не требующим усреднения риска по всем возможным
значениям параметра 𝜶. Естественными для практики являются требования
несмещенности и минимума условной дисперсии оценки 𝜎 𝒚⁄𝛼 .
Рассмотрим, к чему приводит такой «критерийный» подход на примере
оценивания одного скалярного параметра 𝛼
𝛼 . Оптимальной будем
считать оценку 𝛼 , которая одновременно удовлетворяет обоим названным
условиям. При этом полагаем, что такая оценка имеет потенциальную, т.е.
максимально возможную точность. Сформулированные выше требования
формализуем в виде:
𝑀 𝛿𝛼
𝑀
𝛼
𝑀𝛼
𝛼
𝛼
𝜎 𝛼 ⁄𝛼
𝛼
𝛼 𝑝 𝑦 𝑡 /𝛼 𝑑𝑦 𝑡
𝛼
𝑚𝑖𝑛
328
𝛼
0
𝑝 𝑦 𝑡 ⁄𝛼 𝑑𝑦 𝑡
(6.45а)
(6.45б)
В формуле (6.45) сделан переход от векторной реализации y к
непрерывной функции y(t), что эквивалентно, но удобнее при оценивании
скалярных величин.
После
ряда
преобразований,
показанных
в
Приложении
11,
совмещение условий 6.45 приводит к неравенству
𝑀 𝛼
𝛼
⁄
=𝜎 𝛼 ⁄𝛼
Если нижний предел условной дисперсии 𝜎
(6.46)
𝛼 ⁄𝛼
несмещенной
оценки параметра 𝛼 будет соответствовать переходу неравенства (6.46) в
равенство, то в этом случае будет достигнута потенциально возможная
(максимальная) точность.
Равенство в (6.46) определяет нижнюю границу Крамера-Рао, а
полученная при этом оценка обеспечивает минимум условной дисперсии,
и поэтому является эффективной. Вторую производную от условной ПВ в
(6.46) называют информацией Фишера, а самой формуле (6.46) дают
следующую интерпретацию: никакая несмещенная оценка параметра 𝛼
не может обладать условной дисперсией 𝜎 𝛼 /𝛼
меньшей, чем
величина, обратная информации Фишера.
Если
принятый
сигнал
имеет
несколько
параметров,
рассмотрение, как и ранее, вводится К-мерный вектор 𝜶
то
в
‖𝛼 , 𝛼 , … , 𝛼 ‖ .
Отметим, что в этом случае оценка вектора 𝜶 будет несмещенной, если
несмещенными являются оценки его компонент. В общем случае для Kмерного вектора 𝜶 в анализ вводится К×К-мерная матрица Фишера 𝚽
Φ,
,
. При постоянстве оцениваемого вектора 𝜶𝟎 ее элементы
представляются как величины, усредненные по всем реализациям y(t).
В соответствии с (6.46) диагональные элементы матрицы Фишера
выражаются через вторые частные производные по измеряемой i-ой
компоненте вектора 𝜶
329
𝜕 ln 𝑦 𝑡 /𝛼
𝜕𝛼
Φ
(6.47)
В свою очередь внедиагональные элементы матрицы Фишера
определяются через смешанные производные по i-ой и j-ой компонентам
вектора 𝜶
Φ
𝜕 ln 𝑝 𝑦 𝑡 /𝛼 ∂ ln 𝑝 𝑦 𝑡 /𝛼
𝜕𝛼
𝜕𝛼
𝜕 ln 𝑝 𝑦 𝑡 /𝛼
𝜕𝛼 𝛼
(6.48)
Исходя из (6.47), можно считать, что диагональные элементы
матрицы, обратной матрице Фишера, равные Φ , характеризуют
граничные
значения
параметра 𝛼 :𝜎 𝛼 /𝛼
условной
дисперсии
независимого
измерения
Φ . Отличные от нуля смешанные производные
в (6.48) указывают на наличие корреляции ошибок при совместных
измерениях параметров 𝛼 и 𝛼 .
Формулы (6.47) и (6.48) аналогичны выражениям для элементов
матрицы 𝑾
(6.42), которая в байессовской теории является обратной
корреляционной матрицей ошибок. В (6.42) смешанные производные
(6.48)
являются
коэффициентами
разложения
функции
отношения
правдоподобия в ряд Тэйлора (6.24), а здесь – производными логарифма
послеопытной ПВ. Сравнив (6.42) с (6.48) можно убедиться, что формулы
для элементов 𝑤 и Φ
практически одинаковы, что еще раз доказывает
эквивалентность подходов на основе отношения правдоподобия и
послеопытной ПВ при 𝑝 𝛼
𝑐𝑜𝑛𝑠𝑡.
В свою очередь, как было показано в разделе 3, отношение
правдоподобия
в
теории
обнаружения
сводится
к
вычислению
кореляционного интеграла (или его модуля), что будет использовано в
дальнейшем. Итак, можно считать, что обратная корреляционная матрица
ошибок (матрица точности) 𝑾 в 6.42 при отсутствии априорных данных
совпадает с информационной матрицей Фишера, 𝚽
корреляционная матрица ошибок измерений 𝑾
330
𝟏
𝑾 . При этом
совпадает с матрицей,
обратной матрице Фишера 𝚽
, которая для К-мерного вектора α может
быть представлена в виде
𝜎
⎡
⎢𝜌 𝜎 𝜎
⋮
⎢
⎣𝜌 𝜎 𝜎
𝚽
𝜌 𝜎 𝜎
𝜎
⋮
𝜌 𝜎 𝜎
𝜌 𝜎 𝜎
⎤
𝜌 𝜎 𝜎 ⎥ , 𝑖, 𝑗 ∈ 1,2 … 𝐾
⋮
⎥
𝜎
⎦
(6.49)
где 𝜎 – дисперсия ошибки независимого оценивания i-го параметра
(𝜎 - среднеквадратическое значение этой ошибки);
𝜌 – коэффициент корреляции ошибок при совместных измерениях
i-го и j-го параметров.
Матрицу 𝚽
естественно полагать симметричной: 𝜌
следовательно, 𝜌 𝜎 𝜎
𝜌 , а,
𝜌 𝜎 𝜎 .
Если все компоненты вектора 𝜶 удовлетворяют граничным условиям
Крамера-Рао, то его оценка становится совместно эффективной. Для того,
чтобы ошибка оценивания была асимптотически эффективной, когда ее
дисперсия стремится к границе Крамера-Рао, необходимо потребовать
либо
существенного
превышения
сигнала
над
шумом,
либо
продолжительного времени наблюдения.
6.4.
Связь статистических теорий обнаружения и измерений.
В разделе 4 показано, что ФН является результатом оптимальной
обработки входной реализации, а также доказано, что для получения этой
функции надо воспользоваться выходом обнаружителя полезного сигнала.
На этой основе получим связь статистических теорий обнаружения и
измерений.
Для этого запишем условную ПВ процесса 𝑦 𝑡
представляющего
собой
смесь
полезного
сигнала
𝑥 𝑡, 𝜶
с
𝑛 𝑡 ,
вектором
информативных параметров 𝜶 и шума. Воспользуемся соотношением
(6.33) и представим послеопытную ПВ в виде
331
𝑝 𝑦 𝑡 /𝜶
где
𝐶
–
𝐶 𝑒𝑥𝑝
нормирующий
2𝑍 𝜶
Э 𝜶
𝑁
,
множитель,
(6.50)
зависящий
от
y(t)
𝑍 𝜶 – корреляционный интеграл, зависящий от степени схожести y(t) с
ожидаемым сигналом x(t,𝜶), Э 𝜶
𝑥 𝑡, 𝜶 𝑑𝑡 – энергия сигнала с
информационным параметров 𝜶.
Здесь, как и ранее, условная ПВ 𝑝 𝑦 𝑡 /𝜶 может рассматриваться как
функция правдоподобия. Тогда ОМП параметра 𝜶 (при отсутствии других
мешающих сигналов) – это такая оценка, которая максимизирует
показатель степени в (6.50). Для неэнергетических информационных
параметров, таких как временная задержка 𝜏 и частота Доплера (𝐹д ),
имеем Э 𝛼
Э , и тогда правило ОМП требует:
𝑍 𝛼
Э
𝑚𝑎𝑥𝑍 𝛼
(6.51)
Согласно (6.51) ОМП соответствует такому значению 𝜶, при котором
принятая реализация y(t) имеет максимальную корреляцию (схожесть) с
ожидаемым сигналом x(t, 𝜶 ). Практически, ОМП можно получить,
используя набор корреляторов, настроенных на M ожидаемые значения 𝜶
(см. Рис. 6.9).
332
X
∫
X
Y(t)
Решающее устройство
X(t, α1)
∫
X(t, α2)
X
αm
∫
X(t, αM)
Рис. 6.9. Многоканальный корреляционный измеритель
В статистической теории измерений доказано, что ОМП совпадает с
границей Крамера-Рао или асимптотически стремится к ней. Применим
ОМП к задаче оценки параметров полезного сигнала, наблюдаемого на
фоне белого гауссова шума. Для этого определим элементы матрицы
Фишера, заменив в (6.48) производные функции правдоподобия 𝑝 𝒚 𝑡 /𝛼
на производные от корреляционного интеграла по параметру 𝜶
Φ
2 𝜕 𝑍 𝜶
𝑁 𝜕𝛼 𝜕𝛼
2 𝜕
𝑁 𝜕𝛼 𝜕𝛼
𝑦 𝑡 𝑥 𝑡, 𝜶 𝑑𝑡
(6.52)
Согласно постановке задачи измерений реализация 𝑦 𝑡
в смеси
должна обязательно содержать сигнал с истинным значением вектора 𝜶𝟎 .
Поэтому, можно считать, что при достаточном ОСШ 𝑦 𝑡
𝒙 𝑡, 𝜶𝟎 , и
следовательно элементы матрицы Фишера можно выразить через
структуру ФН, например, переходя к комплексным огибающим.
Φ
2 𝜕
𝑁 𝜕𝛼 𝜕𝛼
𝑋 𝑡, 𝜶𝟎 𝑋 ∗ 𝑡, 𝜶 𝑑𝑡
𝑞
𝜕
𝜒 𝜶
𝜕𝛼 𝜕𝛼
𝜶
(6.53)
Напомним, что здесь рассматриваются ФН «стационарного» типа и,
как отмечалось ранее, в этом случае значения ФН будут определяться
333
‖𝛥𝛼 , 𝛥𝛼 , … , 𝛥𝛼 ‖ . Кроме того, в
только разностью параметров ∆𝜶
(6.53) элементы матрицы Фишера будут зависеть как от значений вторых
производных ФН, так и от ОСШ 𝑞 , что физически очевидно.
Для вычислений дисперсий ошибок оценивания параметров сигналов
необходимо получить матрицу, обратную матрице Фишера. Согласно
(6.49) в главной диагонали матрицы 𝚽
стоят дисперсии ошибок,
независимо измеряемых параметров. С учетом (6.46) дисперсия ошибки
оценивания i-го параметра составляет
𝜎
𝛼
1/𝑞 𝜒
|
(6.54)
При этом предполагается, что по остальным компонентам вектора 𝜶
рассогласование отсутствует, т.е. они точно известны. Из (6.54) следует,
что для снижения дисперсии ошибок измерений (повышения точности)
необходимо повысить ОСШ, а также применять такие сигналы, у которых
ФН имеет наиболее острый максимум. ФН таких сигналов будет иметь
наибольшее абсолютное значение вторых производных в окрестности
точки измерения параметра 𝛼 . В формулах (6.53) и (6.54) при вычислении
дисперсии перед второй производной от ФН берется знак минус. Это
связано с тем, что дисперсия 𝜎 по определению положительная величина,
а вторая производная от ФН 𝜒
𝛼
в окрестности максимума всегда
отрицательна.
В заключение подраздела еще раз подчеркнем фундаментальную
роль, которую играет ФН в статистических теориях обнаружения,
разрешения и измерения, как результат оптимальной (согласованной)
обработки радиолокационного сигнала. В связи с этим напомним
для
теории
обнаружения
важна
величина
максимума
ФН,
пропорциональная энергии сигнала, подаваемого на порог;
для теории разрешения важно значение ширины ФН (по выбранному
уровню), обратно пропорциональное ширине полосы сигнала при
334
разрешении по дальности и длительности сигнала при разрешении по
скорости;
для
теории
измерений
важно
значение
крутизны
(второй
производной) ФН в окрестности точки оценки параметра.
Для пространственных координат роль ФН играет ДН.
Потенциальные точности раздельного и совместного
6.5.
измерения времени запаздывания и доплеровской частоты.
Рассмотрим задачу оценки потенциальных точностей измерений
двух информационных неэнергетических параметров радиолокационных
сигналов 𝜏 и 𝐹д 𝐾
2 . К ее решению применим вышеизложенную теорию
с использованием время-частотной ФН Вудворта 𝑡, 𝐹Д . Сначала
рассмотрим задачи раздельного измерения этих параметров, полагая, что
второй точно известен.
6.5.1. Оценка времени запаздывания.
Определим
дисперсию
оценки
времени
запаздывания
когерентного сигнала с известной несущей частотой, при 𝐹Д
воспользуемся (6.54) и в окрестности 𝜏
𝜎
При
1/ 𝑞 |𝜒
𝜎
𝜏
этом
0 или 𝐹Д
1/ 𝑞 |𝜒
𝜏, 0 ||
среднеквадратическое
𝜎
0. Для этого
0 получим
,
значение
(6.55)
ошибки
составит
𝜏, 0 | . Существование производных χ(τ, FД) в окрестности
0
будем считать очевидным. Взятие модуля в (6.55)
определяется тем, что принятый сигнал может иметь случайную
начальную фазу, и поэтому достаточной статистикой для его обнаружения
является модуль весового корреляционного интеграла.
Если двумерное сечение ФН 𝜒 𝜏, 0 разложить в ряд Тейлора в
окрестности 𝜏
0, то его можно аппроксимировать соотношением:
|𝜒
𝜏, 0 |𝜏 /2. (см.4.51). Отсюда следует, что вершина
𝜒 𝜏, 0
1
335
функции 𝜒 𝜏, 0 имеем форму параболы, и чем больше величина |𝜒
𝜏, 0 |,
тем она уже вдоль оси τ. Остроту пика в этом случае обычно связывают с
эффективной среднеквадратической шириной полосы сигнала. Для
установления этой связи воспользуемся формулой (4.38б), определяющей
ФН в частотной области. Дважды продифференцировав (4.38б) по 𝜏 в точке
𝜏
0, получим
𝜒
𝜏, 0
Δ𝑓ск
4𝜋
𝑓 𝐺 𝑓 𝑑𝑓
𝐺 𝑓
𝑑𝑓
(6.56)
Величина среднеквадратической ширины полосы Δ𝑓ск в (6.56) тем
больше, чем шире спектр сигнала. Она имеет размерность (Гц), и
вследствие
этого
среднеквадратическое
запаздывания, равное 𝜎
значение
ошибки
времени
1/ 𝑞Δ𝑓ск , имеет размерность (сек). Значение
△ 𝑓ск представляет собой второй момент распределения спектра сигнала
по частоте.
Отметим, что в литературе часто используют термин «эффективная
ширина полосы», не уточняя об энергетической или среднеквадратической
ширине полосы идет речь. Напомним, что первый термин используется в
теории разрешения (см. подраздел 6.2), а второй – в теории измерений
(см. 6.56).
Проиллюстрируем полученный результат на примере оценки 𝜎
для
двух видов сигналов, часто используемых в радиолокации.
Немодулированный колокольный импульс. Огибающая этого сигнала
имеет вид: 𝑋 𝑡
на
уровне
exp
0.46.
𝜋𝑡 /𝜏и , где 𝜏и – длительность огибающей сигнала
Сечение
соотношением:𝜒 𝜏, 0
|𝜒
𝜏, 0 |
exp
𝜋𝜏и
ФН
вдоль
оси
𝜏
можно
определить
𝜋𝑡 /2𝜏и , откуда имеем:
πΔ𝑓и ,
Δ𝑓ск
√𝜋/𝜏и
(6.57)
√𝜋Δ𝑓и ,
где Δ𝑓и – ширина спектра, обратная его длительности на уровне 0,46.
Из
формулы
6.57
можно
сделать
вывод
о
том,
что
среднеквадратическая ширина полосы этого сигнала примерно в √𝜋 раз
336
больше ширины его спектра на уровне 0,46. При этом потенциальное
значение среднеквадратичной ошибки измерения времени запаздывания
составит
𝜎
𝜏и /𝑞√𝜋
(6.58)
1/ 𝑞Δ𝑓ис √𝜋
Модулированный ЛЧМ радиоимпульс с колокольной огибающей.
Комплексная
𝑋 𝑡
exp
огибающая
этого
𝜋𝑡 /𝜏и exp 𝑗𝜋Б𝑡 /𝜏и ,
сигнала
а
определяется соотношением: 𝜒 𝜏, 0
сечение
exp
𝜋 1
ФН
имеет
вдоль
вид:
оси
𝜏
Б 𝜏 /2𝜏и . Поэтому
для рассматриваемого ЛЧМ сигнала имеем:
|𝜒
𝜏, 0 |
𝜋 1
Б /𝜏и ,
Δ𝑓ск
𝜋 1
Б /𝜏и
(6.59)
Отсюда получим:
𝜎
𝜏и / 𝑞 𝜋 1
(6.60)
Б
Если сравнить среднеквадратические значения ошибок для простого
(6.58) и сложного (6.60) сигналов, то приходим к выводу, что ЛЧМ сигнал
обеспечивает более высокую точность измерения времени запаздывания.
По сравнению с простым импульсом при постоянном значении 𝜏и и 𝑞 ≫ 1
этот выигрыш при Б >> 1 пропорционален его базе (Б).
6.5.2. Оценка доплеровской частоты.
В этом случае известным полагается время запаздывания 𝜏. По
аналогии с предыдущим случаем и формулой (6.55) можно считать, что
дисперсия
и
среднеквадратическое
значение
ошибки
оценивания
определяются из соотношений
𝜎
1/ 𝑞 𝜒 0, 𝐹д
,
𝜎
1/𝑞 |𝜒
0, 𝐹д |
(6.61)
Так же, как и в предыдущем случае, ошибка измерения доплеровской
частоты 𝐹д снижается по мере увеличения ОСШ и абсолютного значения
второй производной в максимуме сечения 𝜒 0, 𝐹Д , характеризующего
остроту пика в точке FД = 0.
337
Точность измерения частоты Доплера у сигналов с большой
длительностью очевидно выше, чем у относительно коротких сигналов.
Это аналогично ранее полученному результату: точность измерения
времени запаздывания у широкополосных сигналов выше, чем у
относительно узкополосных. В формуле (6.61) величина
размерность: 1/Гц = сек, и поэтому 𝜎
0, 𝐹 имеет
𝜒
соответствует эффективной
среднеквадратической длительности сигнала△ 𝜏ск . Для определения этого
соответствия воспользуемся соотношением (4.38а), определяющим ФН во
временной области. Дважды продифференцировав (4.38а) по 𝐹д в точке
𝐹д
0 имеем
|𝜒
0, 𝐹 |
Δ𝜏ск
𝑡 𝑋 𝑡 𝑑𝑡 /
|𝑋 𝑡 | 𝑑𝑡
(6.62)
Тогда согласно (6.61) для дисперсии и среднеквадратического
значения ошибки измерения доплеровской частоты получим
1/ 𝑞 Δ𝜏ск ; 𝜎
𝜎
1/𝑞Δ𝜏ск
(6.63)
Таким образом, в условиях регулярных измерений при q>>1
точность
измерения
доплеровской
частоты
определяется
среднеквадратической длительностью сигнала, которая представляет
собой второй момент от амплитудной огибающей сигнала во времени.
Полученный
результат,
проиллюстрируем
на
как
примере
и
тех
в
предыдущем
же
сигналов:
случае,
простого
немодулированного и сложного ЛЧМ импульса. В обоих случаях сечение
ФН 𝜒 0, 𝐹Д
имеет одинаковый вид 𝜒 0, 𝐹Д
exp
𝜋𝐹Д 𝜏и . Тогда для
второй производной ФН имеем
𝜒
0, 𝐹Д
𝜋𝜏и ; Δ𝜏ск
√𝜋𝜏и
(6.64)
При этом среднеквадратическое значение ошибки измерения частоты
Доплера равно
𝜎
1/ 𝑞𝜏и √𝜋
338
(6.65)
Из (6.65) следует, что если простой и сложный ЛЧМ сигналы имеют
одинаковую длительность 𝜏и , то они обеспечивают одинаковую точность
измерения доплеровской частоты FД при фиксированном и одинаковом
значении ОСШ. При этом различная широкополосность рассматриваемых
сигналов не имеет значения.
6.5.3. Точность совместного измерения времени запаздывания и
доплеровской частоты.
В данной ситуации измеряется не скалярный, а векторный
двухкомпонентный параметр 𝜶
𝜏, 𝐹д
. Запишем информационную
матрицу Фишера в следующем виде
𝚽
𝜒
𝜒
𝑞
𝜒
𝜒
(6.66)
Напомним, что входящие в (6.66) вторые производные здесь берутся
в точке 𝜏
0, 𝐹д
0. Используя (6.49), после обращения матрицы 𝚽
получим корреляционную матрицу ошибок, характеризующую качество
совместных измерений:
𝚽
𝟏
𝜎
𝜌𝜎 𝜎
1⁄ 𝑞 𝜒
где 𝜎
1
𝜌𝜎 𝜎
𝜎
1
,𝜎
𝜌
1/ 𝑞 𝜒
𝜎
𝜌𝜎 𝜎
𝜌𝜎 𝜎
𝜎
,
(6.67)
– дисперсии ошибок раздельных
измерений времени запаздывания при точно известной частоте Доплера и
доплеровской частоты при
точно известном времени запаздывания
соответственно;
𝜌
/ - коэффициент корреляции ошибок при совместных
измерениях времени запаздывания и доплеровской частоты.
Тогда дисперсии ошибок при совместных измерениях можно
определить через соответствующие дисперсии раздельных (независимых)
измерений при помощи соотношений
𝜎
𝜎
1
𝜌
;
𝜎
𝜎
1
339
𝜌
(6.68)
Как следует из (6.68), минимальные дисперсии ошибок совместных
измерений достигаются в случае отсутствия взаимной корреляции 𝜌
Такой
результат
соответствует
когерентным
симметричной структурой ФН относительно осей 𝜏
𝜒
𝜏, 𝐹д
𝜒 𝜏, 𝐹д и 𝜒 𝜏, 𝐹д
𝜒 𝜏, 𝐹д ,
т.е.
ФН
0.
сигналам
0 и 𝐹д
с
0, когда
является
четной
функцией своих агрументов. Для этих сигналов характерно равенство
нулю второй смешанной производной 𝜒
,
0. К ним относятся
одиночные и пачечные сигналы без внутриимпульсной модуляции, а также
фазокодоманипулированные сигналы по кодам Баркера или М –
последовательностям сигналы (см. раздел 4). Для этих распространенных
в радиолокации сигналов дисперсии ошибок совместных измерений
параметров 𝜏и и 𝐹д не отличаются от дисперсий раздельных измерений этих
параметров.
Как следует из 6.68, при 𝜌
0 дисперсии 𝜎 и 𝜎
дисперсии ошибок раздельных измерений в 1/ 1
превышают
𝜌
раз. Этим
свойством обладают сигналы со «скошенной» формой ФН в плоскости
нулевого
сечения.
Примером
такого
сигнала
может
служить
вышерассмотренный ЛЧМ импульс.
Согласно (6.60) среднеквадратическое значение ошибок измерения
запаздывания при Б>>1 приближенно составляет 𝜎
поэтому, если расширить спектр сигнала, ∆𝑓ис при 𝜏и
𝜏и / 𝑞Б√𝜋
и
𝑐𝑜𝑛𝑠𝑡 возрастает
точность временных измерений. С другой стороны, по мере возрастания
базы
сигнала
увеличивается
коэффициент
корреляции
ошибок
𝜌.
Представим значения вторых производных для ЛЧМ импульса с
колокольной огибающей в следующем виде:
|𝜒
𝜏, 0 |
𝜋 1
Б
𝜏и
, |𝜒
0, 𝐹 |
𝜋𝜏и , |𝜒
0,0 |
𝜋Б
(6.69)
Для этих значений вторых производных коэффициент корреляции
ошибок равен 𝜌
Б/ √1
Б . Подставим это значение 𝜌 в формулу (6.59)
340
и для среднеквадратического значения ошибки измерения запаздывания
получим
1
𝜎
1
𝜏и
𝜏и
Б/√1
𝑞 𝜋 Б
Б
1
(6.70)
𝑞 √𝜋
Эта формула наглядно показывает, что величина 𝜎 при неизвестной
частоте Доплера у сложного ЛЧМ сигнала точно такая же, как у простого
немодулированного импульса (см 6.60). В литературе ее часто называют
«скоростная ошибка измерения дальности», о которой упоминалось в
разделе 4.
Для
ЛЧМ
сигнала
среднеквадратическая
доплеровской частоты равна
𝜎
𝜎
1
Б/√1
а
это
означает,
что
по
𝜎
Б
ошибка
1,
(6.71)
Б
мере
возрастания
Б
измерения
она
практически
пропорционально увеличивается и стремится к ее значению в отсутствии
частотной модуляции.
Заметим, что в радиолокации с использованием ЛЧМ сигнала
разработан ряд методов уменьшения ошибки 𝜎 из-за незнания частоты
Доплера. К числу этих методов относятся:
- подбор длительности зондирующего ЛЧМ сигнала в соответствии с
условием𝜏и ∙ 𝐹д
≪ 1;
- измерение радиальной скорости цели траекторными методами и ее
учет в значении частоты Доплера;
излучение двух зондирующих ЛЧМ сигналов с нарастающим и
убывающим законами изменения частоты.
341
6.6.
Измерение частотно-временных параметров когерентных
сигналов
6.6.1. Регулярное измерение неэнергетических параметров
когерентных сигналов.
В радиолокации априорную ПВ любого измеряемого параметра, как
правило, можно полагать равномерной 𝑝 𝛼
𝑐𝑜𝑛𝑠𝑡. Тогда ППВ
полностью определяется отношением правдоподобия, и от решения (6.38)
можно перейти к уравнению
ln 𝑙 𝑦/𝛼
0 при (𝛼
𝛼
(6.72)
Отметим, что в общем случае уравнение (6.72) может оказаться
нелинейным алгебраическим, а иногда трансцендентным. На практике
точное решение удается получить далеко не всегда. Поэтому широко
распространены приближенные методы решения.
Один из таких методов основан на разложении функции ln 𝑙 𝑦/𝛼 в
ряд Тэйлора в окрестности некоторого опорного (ожидаемого) значения
𝛼 . Это значение должно быть достаточно близким к истинному, например,
для угловых измерений это может быть направление локации, иначе говоря
– ориентация ДН. Тогда, исходя из указанного предположения, текущую
оценку измеряемого параметра 𝛼 можно получить из соотношения:
𝛼
где 𝜎
𝛼
ln 𝑙 𝑦/𝛼
𝜎
∂ ln 𝑙 𝑦/𝛼
|
∂α
,
(6.73)
– дисперсия оценки текущего измерения
параметра.
Часто пользуются итерационными методами отыскания оценки 𝛼 , в
котором в качестве опорного используется некоторое значение 𝛼 . После
его подстановки получают оценку 𝛼 . Уже её используют в качестве нового
опорного значения и т.д. процесс продолжается до тех пор, пока поправка
342
в (6.73) не будет равна нулю, т.е. будет найдена оценка 𝛼 ,
соответствующая максимуму ln 𝑙 𝑦/𝛼 на i-ом шаге.
Операцию дифференцирования достаточной статистики в (6.73)
можно заменить вычислением конечных разностей:
1
𝑦
ln 𝑙
∆𝛼
𝛼
∂ ln 𝑙 𝑦/𝛼
∂α
ln 𝑙
𝑦
𝛼
Значения 𝛼 и 𝛼 выбираются вблизи опорного значения параметра
𝛼 , и, как правило, симметрично относительно него. Причём, чем меньше
интервал ∆𝛼
В
𝛼
РЛС
𝛼 , тем точнее вычисляется производная.
информация
неэнергетических
о
параметрах
цели
в
основном
принятых
содержится
в
квазидетерминированных
сигналов. В разделе 3 показана связь отношения правдоподобия с весовым
корреляционным интегралом: ln 𝑙
𝑞 |𝑍 |
𝑐𝑜𝑛𝑠𝑡 или ln 𝑙
𝑞 |𝑍 |
𝑐𝑜𝑛𝑠𝑡 в
зависимости от характера случайных параметров сигнала. Поэтому от
уравнения (6.72) можно перейти к следующим соотношениям:
для сигнала со случайной начальной фазой:
∂|𝑍|
∂α
0, 𝛼
(6.74а)
𝛼
для сигнала с равновероятной начальной фазой и рэлеевской
случайной амплитудой:
∂|𝑍|
∂α
При |𝑍|
0, 𝛼
(6.74б)
𝛼
0 оба уравнения равносильны и каждое из них может
рассматриваться как уравнение правдоподобия для отдельных случаев.
Заметим,
что
из
соотношения
(6.74б),
используя
правило
дифференцирования, следует ещё один вариант уравнения правдоподобия:
∂|𝑍|
∂𝑍
2𝑅𝑒
∂𝑍 ∗
𝑍
∂α
0,
343
𝛼
𝛼
(6.74в)
Все вышеприведённые уравнения можно использовать для синтеза
измерителей, в который применяются дискриминаторные устройства. Этот
вывод следует из уравнения входного напряжения дискриминатора в виде
∆д
𝛼
∂
𝑦
ln 𝑙
|
∂α
𝛼
𝛼
(6.75)
𝜎
Уравнения (6.74а,б,в) соответствуют линейному ∆дл , квадратичному
∆дк и фазовому ∆дф детектированию.
Необходимость применения дискриминаторов в радиолокационных
измерителях физически связана с тем, что при любом способе измерения
основной задачей является вычисление разности 𝛼
𝛼 между оценкой,
полученной из реализации y(t) и истинным значением параметра. В
литературе эту разность обычно называют «невязкой», а дискриминаторы
устроены
таким
образом,
чтобы
вычислить
величину,
ей
пропорциональную.
Подобный «дискриминаторный» подход к прицеливанию хорошо известен
снайперам и артиллеристам. Истинную координату цели они обычно оценивают по
величине промаха, после чего в прицел вводят соответствующую коррекцию.
Для любого скалярного параметра, например 𝜏 или 𝐹д , производную
часто удобно вычислять через конечные разности параметров, сдвинутых
на
∆𝛼/2 относительно точки оценивания 𝛼 . При линейном и фазовом
детектировании соответственно используются соотношения
Δдл
Δдф
1
𝑍 𝛼
Δ𝛼
1
𝑅𝑒 𝑍 𝛼
Δ𝛼
Δ𝛼
Δ𝛼
𝑍 𝛼
2
2
Δ𝛼
Δ𝛼
𝑍 𝛼
𝑍∗ 𝛼
2
2
(6.76а)
(6.76б)
где Δ𝛼 – малое приращение параметра, как правило, не превышающее или
равное элементу разрешения по 𝛼 ;
Зависимость выходного эффекта дискриминатора Δ𝜕 от величины
рассогласования 𝛼
𝛼 называют дискриминаторной характеристикой.
С использованием ФН при 𝑞 ≫ 1 ее можно рассчитать на основе
соотношения (6.73а). После подстановки в него ФН получим
344
Δ
𝑑𝜒 𝛼 , 𝛼
|
𝑑𝛼
𝑞
𝑞 /Δ𝛼 𝜒 𝛼
Δ𝛼
2
𝛼
χ 𝛼𝑦
𝛼0
Δ𝛼
2
Δ𝛼
2
𝜒 𝛼
χ 𝛼𝑦
0
а
∆д
𝛼0
𝛼
Δ𝛼
2
(6.77)
Δ𝛼
2
Δ𝛼
2
𝛼𝑦
𝛼0
𝛼𝑦
𝛼0
б
Рис. 6.10. Сдвинутые на ∆α/2 ФН а) и дискриминаторная
характеристика б)
Для произвольного значения 𝛼 на рис (6.10а,б) в обобщенном виде
представлены
функции
𝜒 𝛼
𝛼
дискриминаторная характеристика Δд 𝛼 при 𝛼
и
соответствующая
0.
В зависимости от вида измеряемого параметра различают временные,
частотные, частотно-временные и угловые дискриминаторы. По принципу
действия дискриминаторы различаются на амплитудные и фазовые. При
оценке 𝛼 выбирается так, чтобы измерения проводились на линейном
участке дискриминаторной характеристики. Например, в измерителях
частоты в качестве 𝛼
используется частоты, на которую настроен
дискриминатор. В угловых дискриминаторах 𝛼 обычно характеризуется
равнофазным или равносигнальным направлениями.
Заметим, что при выборе варианта измерителя следует учитывать,
что неследящие измерители обычно применяются в многоцелевых
обзорных РЛС, для которых не требуется высокая точность измерения
координат.
345
6.6.2. Структуры дискриминаторов времени запаздывания и
частоты
Для синтеза дискриминаторов воспользуемся соотношениями (6.73),
а для выделения операций, непосредственно связанных с измерениями,
корреляционную обработку представим выражением
𝑍
1
𝑞𝑁
Y t 𝑋 ∗ 𝑡, 𝛼 𝑑𝑡
(6.78)
Рассмотрение начнем с временных дискриминаторов, которые
оценивают время запаздывания 𝜏.
На Рис. 6.11 показан временной дискриминатор с предварительным
вычислением
модульного
значения
корреляционного
интеграла.
В
соответствии с 6.76а здесь дискриминационный эффект обеспечивается
применением двух узких полустробов вида 𝛿 𝜏
∆𝜏⁄2 с последующим
вычитанием напряжений выходов двух интеграторов:
Δ
л
𝑍 𝜏 𝛿 𝜏
𝜏
Δ𝜏
𝑑𝑡
2
𝑍 𝜏 𝛿 𝜏
𝜏
Δ𝜏
𝑑𝑡
2
𝑍 𝜏0
(6.79)
∆𝜏
2
∆д
𝑍 𝜏
𝑍 𝜏0
𝜏̂
∆𝜏
2
Рис. 6.11. Структурная схема временного дискриминатора с генератором
полустробов
Согласно (6.79) на Рис. 6.11 реализуется разность опережающего и
отстающего на
∆𝜏⁄2 напряжений, вырабатываемого генератором
346
опорного напряжения (ГОН). Положения полустробов соответствуют
значениям
временной
«центральная»
задержки
задержка,
𝜏
𝜏
,
которую
∆𝜏/2,
𝜏
где
устанавливают,
–
общая
исходя
из
предшествующих данных. Схема на Рис. 6.11 реализует получение
значения ∆дл , соответствующее (6.76а)
Временной
дискриминатор
с
фазовым
детектированием,
построенный на основе двухканального корреляционно-фильтрового
обнаружителя показана на Рис. 6.12.
𝜏0
ГОН
X
∫
𝑍 𝜏1
∑
Y(t)
X
∫
X
∫
∆τ
X
𝑍 𝜏2
Рис. 6.12. Временной дискриминатор с фазовым детектированием
В
этой
схеме
ГОН
вырабатывает
комплексные
амплитуды
ожидаемого сигнала с целью его демодуляции. Эти амплитуды сдвинуты
на
∆𝜏/2, аналогично предыдущему случаю. Сопоставляя близость
принимаемого сигнала с опорными, можно оценить производную 𝑑|𝑍| /𝑑𝜏.
Этот подход соответствует (6.76б) для вычисления ∆ ф .
Частотные дискриминаторы можно строить на основе схем,
аналогичных временным дискриминаторам. Для их синтеза в 6.76 следует
положить 𝛼
𝐹д . На Рис. 6.13 показан частотный дискриминатор – аналог
временного на Рис. 6.11, построенный на основе двухканального
фильтрового
𝑓,
𝑓пр
приемника.
Его
каналы
настроены
не
частоты:
∆𝐹Д ⁄2. В этой схеме выходное напряжение оказывается
пропорциональным 6.76а, и его значение соответствует ∆д .
347
На Рис. 6.13 дискриминаторное напряжение вырабатывается в
результате вычитания двух продетектированных напряжений.
𝑓
𝑓пр
∆𝐹Д /2
Y(t)
X
Д1
Ф1
∆𝐹Д
𝑓
𝑓пр
ГОН
∑
∆𝐹Д /2
Д2
Ф2
𝐹Д0
Рис. 6.13. Частотный дискриминатор с амплитудным детектированием
Еще один вариант частотного дискриминатора, но с фазовым
детектированием показан на Рис. 6.14.
Y(t)
X
Ф1
𝐺0 𝑓
𝑑𝐺0 𝑓
𝑑𝑓
∑
f
ГОН
𝐹д
∆𝐹Д
f
Ф2
Рис. 6.14. Частотный дискриминатор с фазовым детектированием
Схема на Рис. 6.14 построена на основе представления модуля
корреляционного интеграла в виде
𝐺 𝑓 𝐺∗ 𝑓
|𝑍 |
где 𝐺 𝑓 и 𝐺 𝑓
𝑓р
𝐹
𝑑𝑓 ,
(6.80)
– спектральные плотности комплексных амплитуд
принимаемого и ожидаемого сигналов соответственно.
Согласно
6.75в
выходной
эффект
частотного
фазового
дискриминатора может быть получен после дифференцирования (6.80) по
частоте
348
∆пф
𝑑 |𝑍 |
𝑑𝑓
𝑅𝑒 𝐺 𝑓
𝑑 ∗
𝐺 𝑓
𝑑𝑓
𝐺 𝑓 𝐺∗ 𝑓
𝑓пр
𝐹
д
(6.81)
𝑓пр
𝐹
д
𝑑𝑓
Формула (6.81) показывает, что на фазовый детектор на Рис. 6.14
должны
поступать
напряжения
двух
фильтровых
каналов
со
спектральными плотностями ожидаемого сигнала 𝐺 𝑓 и 𝑑𝐺 𝑓 /𝑑𝑓.
На
Рис.
6.15
показана
структурная
схема
время-частотного
дискриминатора с амплитудным детектированием. Его дискриминаторная
характеристика Δ
определяется на основе выражения двух скалярных
составляющих оптимального выходного эффекта в рабочей точке.
Для времени задержки
Δд𝜏
𝜕𝑍 𝜏, 𝐹д
𝜕𝜏
1
𝑍 𝜏̂
Δ𝜏
Δ𝜏
,𝐹
2
𝑍 𝜏̂
д
Δ𝜏
,𝐹
2
д
Для частоты Доплера
Δд𝐹
𝜕𝑍 𝜏, 𝐹д
𝜕𝐹
1
𝑍 𝜏̂ , 𝐹
Δ𝐹
д
𝑌 𝑡 𝑋∗ 𝑡
где 𝑍 𝜏, 𝐹д
Δ𝐹д
2
𝜏 𝑒
𝑍 𝜏̂ , 𝐹
д
д
Δ𝐹д
2
(6.82)
.
Согласно (6.79 и 6.80) в частотно-временном дискриминаторе
должно быть предусмотрено две цепи выработки невязок: по времени
запаздывания Δд𝜏
𝜏̂
𝜏
и по доплеровской частоте Δд𝐹
𝐹
𝐹 .
Каждая невязка вырабатывается своим дискриминатором. Временной
дискриминатор строится по схеме рис (6.11), а частотный – по схеме (6.13).
На умножители дискриминаторов подаются три опорных напряжения,
соответствующих прогнозируемым значениям 𝜏̂ и 𝐹Д . При этом опорные
напряжения согласованы с ожидаемым сигналом, а их аналитические
выражения приведены на рис (6.14).
349
Гетеродин
Дискриминатор
временной
Δд𝜏
Дискриминатор
частотный
Δд𝐹
𝑦 𝑡
𝑓пр
Х
𝑓0
𝑅𝑒 𝑋𝑗 𝑡
𝜏̂0
Δ𝜏
2
𝑒 𝑗 2𝜋
𝑅𝑒 𝑋 𝑡
𝑓пр Δ𝐹0д 𝑡
𝑅𝑒 𝑋𝑗 𝑡
ГОН
𝜏̂ 0 𝑒 𝑗 2𝜋
𝜏̂0
Δ𝜏
2
𝑓пр Δ𝐹0д 𝑡
𝑒 𝑗 2𝜋
𝑓пр Δ𝐹0д 𝑡
F0д
τ0
Рис. 6.15. Структурная схема время-частотного дискриминатора с
амплитудным детектированием.
6.7.
Измерение угловых координат источников когерентных
сигналов
6.7.1. Точностные характеристики при измерении угловых
координат.
Теоретические подходы к оценке частотно-временных параметров на
основе ФН (см. подраздел 6.5) пригодны и для оценки пространственных
координат. Точность измерения угловых координат определяют параметры
ДН
антенны,
которая
в
данном
случае
интерпретируется
как
пространственная ФН. В качестве антенной системы будем полагать Мэлементную ФАР с эквидистантным шагом d, согласованную с приходом
сигнала с направления 𝜃 , как показано на Рис. 6.16
350
При равномерном амплитудном распределении эта ДН 𝐹 𝜃, 𝜃
определяется соотношением:
|sin 𝑀𝑢 / 𝑀sin 𝑢|,
𝐹 𝜃, 𝜃
где 𝑢
𝜋𝑑 sin 𝜃
(6.83)
sin 𝜃 /𝜆 – обобщенная координата, 𝜃 – текущий угол.
𝜃0
1
2
ФВ
3
ФВ
М
ФВ
ФВ
d
∑
𝐹 θ, θ0
а
Рис. 6.16. Структурная схема М-элементной ФАР
Из (6.83) через вторую производную по 𝑢 определим дисперсию
измерения угловой координаты. По аналогии с частотно-временной ФН
для этого случая согласно (6.46) имеем
𝜎
1/𝑞 𝐹
𝜃, 𝜃
(6.84)
Для упрощения вычислений числитель и знаменатель (в 6.83)
аппроксимируем первыми членами разложения в степенной ряд при малых
значениях координаты 𝑢, т.е. в окрестности 𝜃
sin 𝑀𝑢
𝑀𝑢 1
𝑀 𝑢
6
;
sin 𝑢
351
1
𝑢
6
(6.85)
Используя (6.85), и ограничиваясь параболической аппроксимацией
вершины функции 𝐹 𝜃, 𝜃 , выражение для ДН примет вид
𝐹
В точке 𝜃
𝐹
𝐹 𝜃, 𝜃
1
𝑢 𝑀
𝜃, 𝜃
𝜋
𝑀
3
1 /6
(6.86)
𝑑
cos 𝜃
𝜆
1
𝜃 вторая производная, входящая в (6.84), равна
𝜋
𝑀
3
𝜃, 𝜃 |
𝐹
Величину
𝜃 ,𝜃
𝑑
cos 𝜃
𝜆
1
можно
(6.87)
интерпретировать
как
нормированную к длине волны 𝜆 среднеквадратическую длину апертуры
антенны
𝑙ск
𝐹
𝜋
𝜃, 𝜃
𝑀
√3
1
𝑑
cos 𝜃
𝜆
(6.88)
Отсюда для СКО измерения угла 𝜃 в окрестности 𝜃
получим
выражение
𝜎
√3𝜆
1 𝑞𝑙ск
√𝑀
1𝑑 cos 𝜃 𝜋𝑞 √𝑀
,
(6.89)
где 𝑞 – ОСШ по напряжению на выходе одного элемента ФАР 𝑞
𝑞 ⁄𝑀 .
Согласно
минимальное
(6.87-6.69),
значение
максимальная
СКО
𝑙ск
достигаются
и
в
sin 𝑢
𝑢 cos 𝑢 ⁄𝑢 .
max см. 6.88 , а 𝜎
случае
двойного
sin 𝑢⁄𝑢. Тогда первая
дифференцирования суммарной ДН вида 𝐹∑ 𝑢
производная 𝐹∑ 𝑢
соответственно
будет описывать разностную ДН вида 𝐹∆ 𝑢
Именно
у
такой
разностной
ДН
𝑙ск
𝑚𝑖𝑛. В литературе её определяют, как ДН с
максимальной крутизной.
Используя (6.88) и (6.89), определим СКО измерений для двух
случаев, имеющих теоретическое и практическое значение
M = 2 – разделение ФАР на две половины (рис. 6.17)
352
𝜆
𝜎
√2𝑞 𝜋𝑑 cos 𝜃
𝜋𝑞 √2
𝑑
cos 𝜃
𝜆
(6.90)
M>>1 – многоэлементная ФАР (Рис. 6.16)
В этом случае относительно предыдущего значение ОСШ следует
увеличить в
𝑀⁄2 раз. Таким образом значение СКО составит
𝜆
𝜎
𝜋
𝑞
𝑀 𝑙г
cos 𝜃
8 𝜆
𝜋𝑞
𝑑
(6.91)
В формулу(6.91) входит проекция истиной геометрической длины
антенны 𝑙г
𝑀𝑑 на плоскость, перпендикулярную направлению прихода
волны.
Полученные соотношения являются полной аналогией соотношений
для частотно-временных параметров. Точность измерения угловых
координат
тем
выше,
чем
среднеквадратический
размер
среднеквадратическая
ширина
больше
ОСШ
и
нормированный
апертуры
(для
дальности
–
спектра,
для
скорости
–
среднеквадратическая длительность).
Ситуация, когда М = 2 (Рис. 6.17) является распространенной в
практике радиолокации и является частным случаем многоканальной
пеленгации. Многоканальные методы (М ≥ 2) принципиально позволяют
измерять угловую координату цели по единственному импульсу. Поэтому
в литературе их называют моноимпульсными методами пеленгации. Эти
методы могут быть основаны на междуканальном сравнении фаз или
амплитуд. В соответствии с этим устройства измерения угловых координат
подразделятся на фазовые и амплитудные. Для этого в ФАР формируются
соответствующие каналы с фазовыми или амплитудными различиями.
353
𝜃0
dM = Md/2
...
...
dM
1
M/2
2
M/4
...
M/4
2
M/2
...
1
Рис. 6.17. Пояснение к работе двухканального (М = 2) фазового
пеленгатора.
6.7.2. Двухканальный фазовый пеленгатор.
Принцип фазового метода измерения углов основан на фазовых
различиях
ДН
каналов
антенной
решетки,
обусловленных
пространственным разносом их фазовых центров. При этом амплитудные
ДН
излучателей
каналов
полагаются
идентичными
и
одинаково
ориентированными. Рассмотрение начнем с двуканальной АР, состоящей
из двух М/2 – элементных подрешеток, разнесенных на расстояние 𝑑
=
Md/2, как показано на Рис. 6.17.
Выходной сигнал такой решетки представляется произведением
𝑋 𝑡, 𝛼
𝑋 𝑡 𝑿 𝛼 ,
𝑿 𝛼
𝑒
(6.92)
,𝑒
где 𝑋 𝑡 – комплексная огибающая сигнала, падающего на АР,
𝛼
sin 𝜃
𝜃
–
информационный
однозначно связанный с углом 𝜃
𝜃
направления главного луча 𝜃 .
354
фазовый
параметр,
𝜃 , который отсчитывается от
Тогда
X(α)
представляет
собой
вектор-столбец
фазового
распределения между двумя подрешетками.
Также, как и для временных и частотных дискриминаторов, синтез
углового дискриминатора сводится
неэнергетического параметра 𝛼
к отысканию оптимальной оценки
в окрестности угла 𝜃 . Эту задачу будем
решать из условия максимального правдоподобия, используя квадрат
модуля корреляционного сигнала:
𝜕 𝑍 𝛼 𝑍∗ 𝛼
𝜕𝛼
𝜕𝑍 𝛼
𝜕𝛼
0 при 𝛼
(6.93)
𝛼
Корреляционный интеграл 𝑍 𝛼 определим, полагая спектральную
плотность шумов 𝑁 в приемных каналах одинаковыми.
1
𝑁
𝑍 𝛼
𝒀 𝑡 𝑿∗ 𝑡, 𝛼 𝑑𝑡
𝑍 𝑒
𝑍 𝑒 ,
(6.94)
𝑌 , 𝑡 𝑋 ∗ 𝑡 𝑑𝑡.
где 𝑍
Из условия максимума квадрата корреляционного интеграла (6.93)
после подстановки в (6.94) имеем
𝑑
∗
𝑍 𝑍 𝑒
𝑑𝛼
𝑍∗𝑍 𝑒
Поскольку 𝑍 ∗ 𝑍 𝑒
cos 𝛼
|𝑍 |
𝑍 𝑍∗𝑒
|𝑍 |
0 при 𝛼
𝛼
,
, используя формулу Эйлера 𝑒
jsin 𝛼 определим выражение для угловой дискриминаторной
характеристики (невязки), получим в виде
𝛼 𝜃
В
△
соответствие
реализовать
по
интегралы 𝑍 𝑍
𝑎𝑟𝑐𝑡𝑔 𝑅𝑒
𝑗𝑍 𝑍 ∗ /𝑅𝑒 𝑍 𝑍 ∗
с
вычислительные
(6.94)
структурной
схеме
(6.18).
Здесь
(6.95)
операции
можно
корреляционные
вычисляются в СФ, а множитель (-j) учитывается
фиксированным фазовращателем на 90° .
355
СФ
𝑍1
𝜑
90°
Х
СФ
𝑅𝑒
𝑗𝑍, 𝑍2∗
Решающее
устройство
Х
Δ𝑔 𝛼
𝑅𝑒 𝑍, 𝑍2∗
𝑍2
Рис. 6.18. Структурная схема углового фазового дискриминатора
Сделаем небольшое отступление, посвященное формуле Эйлера. Она связывает
комплексную экспоненту с тригонометрическими функциями и имеет важнейшее
значение при описании процессов в электротехнике и радиотехнике, а, следовательно,
и в радиолокации. В формуле Эйлера многие видят какое-то гениальное озарение
ученого второй половины XVIII века, так как непонятно, из какой практической
потребности эта формула появилась. Но самое удивительное не это…
Некоторые серьезные ученые на основе формулы Эйлера попытались доказать
существование Бога, или во всяком случае, некого потустороннего разума. Для этого
пользуются вытекающим из формулы Эйлера равенством exp 𝑗𝜋
1. В левой части
этого уравнения стоят иррациональные (несуществующие) числа 𝑒 lim 1 1/𝑥
при x → ∞ и 𝜋 𝑙окр /𝐷 – отношение длинны окружности к ее диаметру = 3,14….., а
также формальные обозначения: (-) минус и 𝑗 √ 1. В его правой части стоит 1
(единица) – вещественное число. Это равенство некоторые интерпретируют
следующим образом: из чисто формальной идеи может появиться что-то
действительное, вещественное. Следовательно, здесь сознание оказывается
первичным по отношению к материи. Возразить трудно, но…
В схеме Рис. 6.18 числитель и знаменатель (6.95) вычисляются путем
перемножения и усреднения за период колебания мгновенных значений
выходных напряжений СФ.
Недостатком схемы на Рис. 6.18 считается относительно большое
влияние неидентичностей фазовых характеристик каналов приема на
оценку θ. Если фазовый разбег каналов равен △φ, то дискриминантная
характеристика △
𝛼 пропорционально сдвигается по фазе на ту же
величину, что приводит к пропорциональной ошибке оценки 𝜃. Покажем
это для случая фиксированной фазовой неидентичности, полагая 𝑍
𝑍 exp
𝑗 𝛼
∆𝜑 . Подставим это выражение в (6.95) для случая малых
значений ∆𝜑, когда
𝛼 + ∆𝜑
и после сокращения на |𝑍 |
числителя и знаменателя получим:
△
𝛼
𝑎𝑟𝑐𝑡𝑔 sin 𝛼
∆𝜑 /cos 𝛼
∆𝜑
𝛼
∆𝜑.
Таким образом, фазовая неидентичность каналов приводит к
смещению нуля дискриминаторной характеристики, и как следствие – к
356
ошибке пеленгации. Этот отрицательный эффект существенно ослабляется
при переходе к суммарно-разностной обработке сигналов подрешеток,
показанной на рис. 6.19.
В этой схеме при помощи кольцевого моста (КМ) на высокой
частоте 𝑓 из сигналов подрешеток (рис. 6.17) формируются суммарный
(∑) и разностный (Δ) каналы. На выходах КМ принимаемые излучателями
колебания
соответственно
вычитаются 𝑌△ 𝑡
𝑌 𝑡
𝑌 𝑡
𝑌∑ 𝑡
складываются
𝑌 𝑡
и
𝑌 𝑡 . После СФ вычисляются суммарный и
разностный весовые интегралы, которые можно подставить в 6.93 как
𝑍 и𝑍 .
𝑍
𝑍∑ ∓ 𝑍△ /2
,
(6.96)
Положительный эффект от такой обработки определяется тем, что
наиболее чувствительной к изменению угловой координаты весовой
интеграл 𝑍△ вычисляется из сигналов достаточно идентичных антенных
каналов. Исходя из (6.95), входящее в (6.93) произведение 𝑍 𝑍 ∗ равно
𝑍 𝑍∗
𝑍∑
∗
𝑍∑ 𝑍△
𝑍△
𝑍∑∗ 𝑍△ )/4,
(6.97)
а дискриминационная характеристика преобразуется к виду:
𝛼
△
𝑎𝑟𝑐𝑡𝑔 2𝑅𝑒
𝑗𝑍∑ 𝑍△ 𝑍∑
𝑍∆
(6.98)
𝛼 и 𝑍△ малы, поэтому
Обычно для дискриминаторов значения △
на практике (6.97) используется в упрощенной форме
𝛼 𝜃
2𝑅𝑒
∗
𝑗𝑍∑ 𝑍△
/𝑍∑
(6.99)
Как показано на Рис. 6.19 деление реализуется близкой к идеальной
АРУ суммарного канала. Устройство АРУ поддерживает постоянной
амплитуду суммарного канала 𝑘 𝑍∑
Коэффициент
усиления
𝑘
𝑐𝑜𝑛𝑠𝑡 (𝑘 - коэффициент усиления).
переносится
и
на
разностный
канал,
управляемый от общей АРУ. Поэтому в этой схеме реализуется выходной
эффект, соответствующий операциям по формуле (6.98).
357
𝑌1 𝑡
𝜑
КМ
𝑌Δ 𝑡
Х
90°
𝑓пр
СФ
АРУ
Гетеродин
∆д
𝑌∑ 𝑡
𝑌2 𝑡
Х
𝛼
Х
𝑓пр
СФ
Рис. 6.19. Структурная схема фазового пеленгатора с суммарноразностной обработкой.
Докажем положительный эффект схемы Рис. 6.19 по сравнению с
дискриминатором на Рис. 6.18. Структурная схема углового фазового
дискриминатора
. Если суммарный и разностный приемные каналы отличаются по
фазе на △ 𝜑, то пренебрегая шумами имеем:
𝑍∑
𝑍△
𝛼
2
𝛼
exp 𝑗
2
exp 𝑗
exp
exp
𝛼
2
𝛼
𝑗
2
𝑗
exp 𝑗 △ 𝜑/2
exp 𝑗 △ 𝜑/2
Подставляя эти соотношения в (6.98) определим дискриминаторную
(пеленационную) характеристику, которая равна
𝛼 𝜃
Итак,
△
сравнительно
𝛼 cos △ 𝜑 , при 𝛼 ≪ 1
незначительная
фазовая
(6.100)
неидентичность
(|△ 𝜑| ≪ 𝜋/2 в схеме Рис. 6.19 изменяет лишь крутизну △ , и, в отличие
от схемы Рис. 6.18. Структурная схема углового фазового дискриминатора
, не приводит к смещению нуля пеленгационной характеристики.
358
6.7.3. Двухканальный амплитудный дискриминатор.
Принцип амплитудного метода измерения углов основан на
использовании амплитудных различий между ДН антенных каналов
𝐹 𝛼 и 𝐹 𝛼 в направлении на цель: 𝛼
2𝜋𝑑 sin 𝜃 /𝜆. Как показано на рис.
6.20а,б, здесь отсчет углов производится от равносигнального направления
2𝜋𝑑 sin 𝜃 /𝜆, для которого: 𝐹 𝛼
(РСН) 𝛼
𝐹 𝛼 . При этом
полагается, что фазовые центры антенных каналов совмещены.
РСН
𝐹1 𝛼
𝐹∑ 𝛼
𝐹2 𝛼
𝛼
𝐹∆ 𝛼
𝛼0
𝛼
𝛼0
𝛼
𝛼
б)
а)
Рис. 6.20. Диаграммы направленности амплитудных пеленгаторов: две
суммарные ДН а) и суммарно-разностная ДН б)
В этом случае вектор ожидаемого сигнала имеет вид
𝑿 𝑡, 𝛼
𝑋 𝑡 ‖𝐹 𝛼 , 𝐹 𝛼 ‖
(6.101)
Как и в предыдущем случае, оптимальную оценку 𝛼 найдем из
уравнения
правдоподобия.
Значение
корреляционного
интеграла
представляет собой результат когерентного суммирования колебаний в
двух каналах
𝑍 𝛼
1
𝑁
𝑌 𝑡 𝑋 ∗ 𝑡, 𝛼 𝑑𝑡
𝑍 𝐹 𝛼
𝑍 𝐹 𝛼
(6.102)
Для корреляционных интегралов (6.102) по аналогии с Рис. 6.19 сразу
будем рассматривать вариант суммарно-разностной обработки (Рис. 6.20),
наименее чувствительный к неидентичности приемных каналов, в данном
359
случае амплитудных. Два варианта формирования суммарно-разностных
ДН M-элементной ФАР показаны на рис. 6.21.
Как видно из рис. 6.21а, колебания, принимаемые подрешетками со
сдвинутыми
фазовыми
центрами,
равновесно
суммируются,
а
их
амплитудные ДН ориентируются в направлениях 𝛼 и 𝛼 (см. рис. 6.20а).
Для этих направлений из подрешеток формируются суммарный 𝐹 ∑ 𝛼 и
разностный 𝐹 ∆ 𝛼 , которые подвергаются соответствующей обработке.
1
2
3
M/2-1/2
M/2-1/2
...
M-2
M
...
Центр
∑
M-1
∑
∑
Δ
Вычисление
∆𝑔0 𝛼
𝛼
а)
1
2
3
M-2
M-1
M
КМ
∑
Δ
КМ
∑
Δ
КМ
Δ
∑
∑
∑
Вычисление
𝛼
𝛼
б)
Рис. 6.21. Схемы формирования суммарно-разностных ДН: зависимых а)
и независимых б)
360
Второй вариант формирования суммарно-разностной ДН показан на
Рис. 6.21б. В отличие от схемы на Рис. 6.21а, в схеме на Рис. 6.21б,
параметры разностной ДН могут выбираться независимо от параметров
суммарной ДН, так как амплитудное распределение для 𝐹 ∆ 𝛼 не связано с
амплитудным распределением для 𝐹 ∑ 𝛼 .
Вернёмся к выражению (6.102) и в нём выразим 𝑍 и 𝑍 в (6.103) через
суммарный 𝑍∑
𝑍
𝑍
и разностный 𝑍△
𝑍
𝑍
корреляционные
интегралы
𝑍 𝛼
где 𝐹∑,△ 𝛼
𝐹 𝛼
Тогда при 𝛼
𝑑
𝑍 𝐹 𝛼
𝑑𝛼 ∑ ∑
𝑍∑ 𝐹∑ 𝛼
𝑍△ 𝐹△ 𝛼 ,
(6.103)
𝐹 𝛼 - суммарная и разностная ДН.
𝛼 для оптимальной оценки из 6.38 получим уравнение
|𝑍△ | 𝐹△ 𝛼
2𝐹∑ 𝛼 𝐹△ 𝛼 𝑅𝑒 𝑍∑ 𝐹△
∗
(6.104)
0
Для упрощения синтезируемого дискриминатора примем, что
снижение энергии, принимаемой по суммарной ДН, в пределах малых
угловых рассогласований △ 𝜃
𝜃
𝜃
компенсируется увеличением
энергии, принимаемой по разностной ДН и наоборот (см. Рис. 6.20б):
𝐹∑ 𝛼
Тогда при вычислении
представим выражем 𝐹∑ 𝛼
𝐹△ 𝛼 𝐹△ 𝛼 𝑍∑
𝑍△
𝐹△ 𝛼
𝑐𝑜𝑛𝑠𝑡
производной (6.104) суммарную ДН
𝑐𝑜𝑛𝑠𝑡
𝐹∑ 𝛼 𝐹△ 𝛼
𝐹∆ 𝛼 , в результате получим
𝐹∑ 𝛼 𝐹△ 𝛼 𝑅𝑒 𝑍∑ 𝑍△
0
(6.105)
Формулу (6.105) можно существенно упростить, если ограничиться
областью 𝛼 ≪ 1, пренебречь слагаемыми в соответствии со следующими
неравенствами:
|𝑍∆ |
𝑍∑
и 𝐹∑ 𝛼 𝐹 𝛼
𝐹∑ 𝛼 𝐹 𝛼
и сократить на 𝐹 𝛼 . Тогда
(6.105) можно представить в виде отношения ДН суммарного и
разностного каналов.
361
𝛼
Δ
𝑅𝑒 𝑍∑ 𝑍△
𝑍∑
𝐹△ 𝛼
𝐹∑ 𝛼
æ 𝛼
(6.106)
Согласно (6.106) отношение напряжения на выходе умножителя
(фазового детектора) к квадрату амплитуды суммарного канала сводится к
функции
æ 𝛼 ,
которая
показывает
отношение
амплитудных
характеристик разностного и суммарного каналов. В окрестности точки
оценки 𝛼 можно полагать, что æ 𝛼
𝑘𝛼 , (k=const), т.е. является линейной
функцией. Поэтому оптимальная оценка 𝛼
должна удовлетворять
соотношению (6.106), но для её получения необходимо воспользоваться
функцией 𝛹 𝛼
𝑘/𝛼 , т.е. функции, обратной æ 𝛼 .
Рассмотренные выше случаи пеленгации в одной плоскости легко
обобщаются на пеленгацию в двух главных плоскостях по азимуту (β) и
углу места (ε). Для их создания необходимо реализовать комбинацию из
двух измерителей (амплитудных или фазовых). Один измеритель работает
в азимутальной плоскости, а другой – в угломестной, что означает
формирование четырех ДН по две в каждой плоскости.
При фазовом методе пеленгации все четыре ДН совмещаются в
пространстве и располагаются симметрично относительно РСН. Если
ширина этих ДН по азимуту и углу места одинаковы, то их сечения по
уровню половинной мощности плоскостью, перпендикулярной РСН,
образуют так называемую «розочку», показанную на Рис. 6.22а.
Амплитудный метод пеленгации можно реализовать в плоской
решетке путем создания суммарно-разностных ДН. Для этого решетку
можно разбить на 4 подрешетки, как показано на Рис. 6.22б.
362
Δум общ
+
∑1
Δум
1.
∑2
2.
КМ
∑общ
3.
∑3
4.
Δум
КМ
∑ум
КМ
∑общ
а)
КМ
∑1
∑общ
Δаз общ
1.
∑2
2.
Δаз общ
+
КМ
3.
Δум общ
∑3
4.
КМ
∑у
б)
Рис. 6.22. Формирование суммарно-разностных ДН из четвертой решетки
(а – фазовым методом, б – амплитудным методом)
Способами, показанными на Рис. 6.22, в РЛС с ФАР обычно
реализуют измерения двух угловых координат: азимута и угла места.
Краткое послесловие к разделу
Опыт преподавания показал, что учащиеся недостаточно четко понимают, а еще
чаще путают статистические критерии максимального правдоподобия (МП) и
максимума послеопытной вероятности (ПВ). Сразу заметим, что оба критерия были
рождены человеческой логикой принятия решений и служат основой постановки задач
оптимизации в радиолокации. Наглядный пример работы и соотношения критериев
МПП и МПВ можно усмотреть в рассказе Конан Дойла «Голубой карбункул» (на это
удачно обратил внимание Финк в книге «Сигналы, Помехи, Ошибки…»(1984г.)).
Героям рассказа Конан Дойла необходимо решить дилемму: кто украл
бриллиант – лорд Хонест или вор-рецидивист Джон Дип? Сначала применим правило
363
МП и для этого воспользуемся гипотезой доктора Ватсона: бриллиант украл тот, кто
находился в комнате дольше! Отметим, что эта гипотеза основана на том, что событие
(кража) уже произошло. Поскольку лорд Хонест находился в комнате 1 час, а вор – 1
минуту, то отношение функций правдоподобия равно 60:1, и мы считаем похитителем
лорда.
Перейдем к критерию максимума ПВ, т.е. используем априорную вероятность
для определения апостериорной вероятности гипотезы, также считая, что кража
произошла. Этот подход в рассказе применил инспектор Лестрейд. Он принял во
внимание, что лорд – уважаемый член общества и известен как очень честный человек,
а Джон Дип – вор, давно охотившийся за голубым карбункулом. Поэтому условно
можно принять, что априорная вероятность того, что именно он, а не лорд, является
похитителем составляет 1000:1. Перемножение этой вероятности с функцией
правдоподобия (см. 6.33) дает следующий результат: 1000/60 ≈ 16, а это означает, что
послеопытная вероятность кражи Джоном Дипом в 16 раз больше, чем лордом
Хонестом. Согласитесь, что даже не зная статистических премудростей можно прийти
к такому же выводу, как у инспектора Лестрейда. Это говорит о том, что критерий
максимума ПВ соответствует логике нормального человека, имеющего жизненный
опыт.
В отсутствие каких-либо априорных данных о подозреваемых логично принять
гипотезу доктора Ватсона. В жизни такая ситуация бывает крайне редко, а в
радиолокации – достаточно часто.
364
ПРИЛОЖЕНИЕ 1
Описание основных типов радиолокационных сигналов во
временной и частотной областях
Радиолокационные сигналы в большинстве случаев представляют
собой узкополосные колебания сверхвысоких частот и с точностью до
постоянного амплитудного множителя могут быть представлены
𝑥 𝑡
𝑥 𝑡 cos 2𝜋𝑓 𝑡
𝑅𝑒 𝑋 𝑡 𝑒
𝜑 𝑡
(П.1.1)
,
где 𝑥 𝑡 и 𝜑 𝑡 описывают законы амплитудной и фазовой модуляции
соответственно; 𝑓
– средняя (несущая) частота; 𝑥 𝑡
𝑋 𝑡 𝑒
–
комплексная амплитуда сигнала. При неподвижной ДН передающей
антенны модуляция сигнала (П. 1.1) определяется радиопередающим
устройством
(РПУ).
Поэтому
(П.
1.1)
можно
рассматривать
как
напряжение на выходе РПУ или как напряженность электромагнитного
поля излучения в фиксированной точке пространства.
Комплексная амплитуда содержит полную информацию о модуляции
сигнала и определяется парой квадратурных амплитуд 𝑋
𝑋 𝑡
X 𝑡
где
𝑋 𝑡
𝑋 𝑡
𝑋 𝑡 𝑐𝑜𝑠𝜑 𝑡
–
𝑡 и𝑋 𝑡 :
𝑗𝑋 𝑡 ,
(П.1.2)
синфазная
(косинусная)
амплитуда;
𝑋 𝑡 𝑠𝑖𝑛𝜑 𝑡 – квадратурная (синусная) амплитуда.
Сигнал 𝑥 𝑡 и его частотный спектр (спектральная плотность) 𝑔 𝑓
связаны друг с другом парой преобразований Фурье:
g ( f )
x (t ) e
j 2 ft
dt ,
(П.1.3)
𝑥 𝑡
1
2𝜋
𝑔
𝑓 𝑒
𝑑𝑓.
(П.1.4)
Комплексная спектральная плотность (П. 1.3) несет информацию об
амплитуде и фазе каждой гармонической составляющей
365
𝑔 𝑓
|𝑔 𝑓 |𝑒𝑥𝑝 arg 𝑔 𝑓 ,
(П.1.5)
где g ( f ) g ( f ) – амплитудно-частотный спектр (АЧС) сигнала,
arg g ( f ) ( f ) – фазочастотный спектр (ФЧС) сигнала.
Аналогично образом можно записать спектральную плотность
комплексной амплитуды (П. 1.2):
𝐺 𝑓
𝑋 𝑡 𝑒
Амплитудно-частотный
𝐺 𝑓 𝑒
𝑑𝑡
Gx ( f )
спектр
(П.1.6)
комплексной
амплитуды
сосредоточен вблизи нулевой частоты в интервале ∆𝑓 , где ∆𝑓 – ширина
спектра импульсного сигнала. Спектры квадратурных составляющих 𝑥 𝑡
и 𝑥 𝑡 комплексной амплитуды также сосредоточены в области нулевых
частот.
Обычно несущая частота радиосигнала значительно больше ширины
спектра 𝑓 ≫ ∆𝑓 , тогда такой радиосигнал можно считать узкополосным.
Его спектральная плотность g ( f ) получается путем переноса спектральной
плотности G x ( f ) его комплексной амплитуды:
1
G x ( f f 0 ),
g ( f ) 2
1
G x ( f f 0 ),
2
f 0,
(П.1.7)
f 0.
Пользуясь соотношениями (П. 1.1) – (П. 1.7), рассмотрим спектры
основных типов импульсных сигналов.
Различают
импульсные
радиосигналы
без
внутриимпульсной
модуляции (простые) и с внутриимпульсной модуляцией (сложные). Для
простых радиосигналов произведение его длительности u и ширины
спектра ∆𝑓 равно единице, т.е.𝜏 ∆𝑓
произведение Б
1. Для сложных сигналов это
𝜏 ∆𝑓 ≫ 1. Величина Б называется базой сигнала. Далее
рассмотрим основные виды зондирующих узкополосных сигналов.
366
Радиоимпульсы без внутриимпульсной модуляции. Наиболее часто
используются
огибающей
прямоугольная
(закона
и
амплитудной
колоколообразная
модуляции)
аппроксимация
простых
одиночных
радиоимпульсов.
Прямоугольный радиоимпульс (рис. П.1.1, а) можно задать в виде
произведения прямоугольного видеоимпульса (рис. П.1.1, б)
X 0 , при t и 2 ,
X (t )
0, при t и 2 ,
(П.1.8)
и гармонического колебания cos( 2 f 0 t ) , т.е.
X (t ) cos(2f0t ), при t и 2,
x(t )
при t и 2.
0,
(П.1.9)
На основании формулы (П. 1.6) спектральная плотность комплексной
амплитуды прямоугольного видеоимпульса (П. 1.8) равна
G x ( f ) X 0
и 2
e j 2ft dt X 0
и 2
Отсюда
нормированный
1 j f и
e j 2 f и
e
j 2f
АЧС
X sin( f и ) .
0 и
f и
комплексной
амплитуды
прямоугольного радиоимпульса имеет вид
G x ( f ) sin(f и )
G x ( 0)
f и
(П.1.10)
и изображен на рис. П.1.1, в. На этом рисунке ширина спектра ∆𝑓
обозначена для уровня 0,64. Для уровня 0,5 можно принять ∆𝑓
1/𝜏
1/𝜏
На рис. П.1.1, г показан фазочастотний спектр (ФЧС) комплексной
амплитуды прямоугольного радиоимпульса. Он имеет скачки фазы на П
при значениях 𝑓
Б/𝜏 , где n 1, 2, ,.
При отсчете времени не от середины прямоугольного импульса, а от
его переднего фронта ФЧС должен быть дополнен слагаемым f и ,
учитывающим запаздывание импульса на время и 2 .
367
С учетом выражений (П. 1.7) и (П. 1.10) нормированный АЧС
прямоугольного
радиоимпульса
(П.
1.9)
для
f 0
определяется
выражением
g x ( f ) sin[ ( f f 0 ) и ]
,
( f f 0 ) и
g x ( f0 )
g x ( f0 )
X 0 и
2
и иллюстрируется на рис. П.1.1, д.
Отметим, что графики рис. П.1.1 построены для случая, когда
средняя частота f0 намного превышает ширину спектра (узкополосный
сигнал), что обычно выполняется на практике. При u прямоугольный
радиоимпульс переходит в гармонический сигнал x(t) X0 cos(2f0t) с одной
спектральной компонентой на частоте f0 .
G(f)
G(0)
X(t)
x(t)
0
1/τ и
t
𝑎𝑟𝑔𝐺 𝑓
а
f
0
в
X(t)
X0
-τи/2
τи/2 t
0
б
0
f
π
г
g(f)
g(0)
1/τ и
0
f0
д
f
Рис. П. 1.1. Прямоугольный радиоимпульс и его АЧС и ФЧС
Одиночный колокольный радиоимпульс (рис. П.1.2, а) описывается
выражением
𝑥 𝑡
𝑒
⁄
и
cos 2𝜋𝑓 𝑡,
368
/
где 𝜏и длительность импульса на уровне 𝑒
0,46
Подставляя это выражение в (П. 1.3), можно убедиться, что
спектральная
плотность
колокольного
радиоимпульса
описывается
вещественной функцией
где 𝑔
𝑔 𝑓
𝑔 𝑒
𝜏и ⁄2 , 𝑏
𝜋𝜏и .
𝑒
,
(П.1.11)
В силу (П. 1.11) для колокольного радиоимпульса амплитудночастотный спектр, как в области f > 0 (первое слагаемое), так и в области
f < 0 (второе слагаемое) также является колокольным (рис. П.1.2, б), а
фазочастотный спектр – нулевым.
Амплитудно-частотный
спектр
колокольной
огибающей
(рис.
П.1.2, в) сосредоточен вблизи нулевой частоты в интервале ∆𝑓 , причем
произведение ∆𝑓
1, т.е. Б≈1.
x(t)
τи
t
G(f)
g(f)
1
Δfи
∆𝑓
Δfи
Δfи
-f0
а
0
б
f0
f
0
в
f
Рис. П. 1.2. Колокольный радиоимпульс и его АЧС
Радиоимпульс с линейной частотной модуляцией (ЛЧМ) – сложный
радиоимпульс, у которого несущая частота изменяется от начала импульса,
к его концу по линейному закону,
f f (t ) f 0
f
и
t,
369
и
2
t
и
2
,
где u длительность ЛЧМ радиоимпульса, ∆𝑓д девиация частоты,
которая характеризует
пределы изменения частоты
от f0 f / 2 до
f0 f / 2 (рис. П.1.3, а).
f(t)
f0 + Δfд/2
а
g(f)
f0
Δfд
f0
n = 30
в
Δf
0
0
x(t)
f0
f
arg 𝑔 𝑓
б
τи/2 t
0
-τи/2
г
0
f
f0
Рис. П. 1.3. ЛЧМ радиоимпульс и его АЧС и ФЧС
Во временной области ЛЧМ радиоимпульс прямоугольной формы
(рис. П.1.3, б) описывается выражением
𝑐𝑜𝑠 2𝜋𝑓 𝑡
𝑥 𝑡
𝜋
0
Δ𝑓
𝑡
𝜏и
при
|𝑡 |
𝜏и ⁄2 ,
при
|𝑡 |
𝜏и ⁄2.
(П.1.12)
Подставляя (П. 1.12) в (П. 1.3), можно определить выражение для
спектральной плотности. Здесь отметим лишь особенности этого спектра.
При величине базы сигнала Б
𝜏 ∙ ∆𝑓
20 АЧС прямоугольного ЛЧМ
радиоимпульса (П. 1.12) аппроксимируется прямоугольником шириной
∆𝑓
∆𝑓
(рис.
П.1.3, в),
а
ФЧС
описывается
параболической
зависимостью
arg g ( f ) u
( f f0 )2
.
f
4
(П.1.13)
График этой зависимости приведен на рис. П.1.3, г.
Для
колокольного
ЛЧМ
радиоимпульса
ФЧС
также
аппроксимируется выражением (П. 1.13), а АЧС описывается колокольной
функцией
370
g( f )
u
1 n2
e ( f f 0 )
2
/ f и 2
,
ширина ∆𝑓 которого мало отличается от ∆𝑓 при больших значениях
базы Б.
Из
анализа
временных
и
частотных
особенностей
ЛЧМ
радиоимпульсов следует, что можно независимо осуществлять выбор его
длительности u и ширины спектра. Это важно для одновременного
обеспечения требуемых значений энергии зондирующего сигнала РЛС и
разрешающих способностей РЛС по дальности и по скорости.
Радиоимпульс
с
внутриимпульсной
фазовой
(фазово-кодовой)
манипуляцией (ФКМ радиоимпульс) состоит из N сомкнутых между собой
коротких (парциальных) радиоимпульсов (дискрет) с длительностью 𝜏
𝜏 /𝑁
и
в
каждый
из
парциальных
соответствующий фазовый сдвиг
радиоимпульсов
вводится
(например, 0 или ). Изменение
(кодирование) начальных фаз в РЛC чаще всего осуществляется в
соответствии с кодами Баркера и Μ - кодами ( M -последовательностями).
Сводка известных баркеровских кодовых последовательностей
приведена в таблице 1.
В
качестве
Таблица 1
кодовая
последовательность
++–
++–+
+++–
+++–+
+++––+–
+++–––+––
1
+–
+++++––++
3
–+–+
примера
на
рис.
П.1.4
фазоманипулированный
по
представлен
коду
Баркера
радиоимпульс x(t) из семи дискрет. Здесь же
показаны закон модуляции X (t ) , начальная
фаза i каждого из дискрет, а также условные
обозначения начальных фаз как знаками + и –,
так и последовательностью нулей и единиц.
Спектр
представить
сдвинутых парциальных радиоимпульсов
371
ФКМ
как
радиоимпульса
наложение
можно
спектров
𝑔 𝑓
𝑔
𝑓
𝐶 𝑒
,
(П.1.14)
где 𝑔 𝑓 – спектральная плотность первого из парциальных;
𝐶
x(t)
1 при Δ𝜑
1 при Δ𝜑
0,
𝜋
g(f)
τи
АЧС простого
радиоимпульса
t
τ0
АЧС ФМ
радиоимпульса
X(t)
1/τ0
t
0 0 0 π π 0 π
Δφi
+ + + ‐ ‐ + ‐
0 0 0 1 1 0 1
0
2/τ0 f0
f
Рис. П. 1.5. АЧС ФКМ
радиоимпульса закон модуляции
X
t
ф
Δ
Амплитудно-частотный спектр g ( f ) g ( f ) ФМ радиоимпульса на
Рис. П. 1.4. . ФКМ радиоимпульс
рис. П.1.4 показан на рис. П.1.5 сплошной линией.
Здесь же для сравнения более узким пунктиром показан АЧС
простого радиоимпульса длительностью 𝜏и
𝑛𝜏 . Видно, что ширина
спектра ФКМ радиоимпульса определяется длительностью короткого
парциального радиоимпульса ∆𝑓
1/𝜏 , а его длительность больше
длительности простого радиоимпульса в число дискрет, т.е. в N раз.
Соответственно при заданной ширине спектра энергии ФМ зондирующего
сигнала может наращиваться за счет числа его дискрет N.
Когерентная пачка простых радиоимпульсов. Пачка радиоимпульсов
представляет собой последовательность конечного числа радиоимпульсов
одинаковой формы длительностью u , следующих друг за другом через
период повторения
Τ и . Если начальные фазы импульсов либо
372
одинаковы, либо изменяются закономерно (неслучайно, по жестко
заданной структуре)), то пачка радиоимпульсов называется когерентной.
Если это требование не выполняется, то пачка радиоимпульсов называется
некогерентной.
MT
τи
t
T
а
2/τи
f0 1/T
2/MT
f
б
Рис. П. 1.6. Когерентная пачка простых радиоимпульсов и ее АЧС
Пример
когерентной
пачки
из
M
простых
прямоугольных
радиоимпульсов показан на рис. П.1.6, а. Здесь все импульсы пачки имеют
одинаковые начальные фазы l 0 и средние частоты f0 . Произведение
несущей частоты f0 на период повторения импульсов T представляет
собой целое число, т.к. период T кратен периоду несущего колебания. Во
временной области такой сигнал можно представить в виде
𝑥 𝑡
𝑥 cos 2𝜋𝑓 𝑡
𝑚𝑇
𝜑 .
(П.1.15)
Пользуясь методикой получения спектра в предыдущем примере (см.
(П.1.14)), АЧС пачки радиоимпульсов (П. 1.15) можно представить в виде
произведения
Μ 1
g x ( f ) g 0 ( f ) e j 2fm g 0 x ( f )
m0
373
sin(fΜΤ )
.
fΜΤ
(П.1.16)
Здесь множитель
g0 x ( f )
представляет АЧС одного простого
радиоимпульса длительностью u , а множитель
учитывает
периодичность сигнала. В соответствии с (П. 1.16) результирующий АЧС
когерентной пачки прямоугольных радиоимпульсов показан на рис.
П.1.6, б сплошной линией. Этот спектр является гребенчатым, огибающая
которого
(штриховая
кривая)
соответствует
спектру
одиночного
радиоимпульса. Ширина гребней обратно пропорциональна длительности
пачки ΜΤ, а частотный интервал между ними определяется частотой
повторения радиоимпульсов
F 1/ Τ
. Если число импульсов
(бесконечная последовательность импульсов), то
АЧС рис. П.1.6, б преобразуется в линейчатый.
374
1/MT 0
Μ
и гребенчатый
ПРИЛОЖЕНИЕ 2
Статистические характеристики помех
П.2.1 Статистические характеристики помех при
одноканальном приеме.
Рассмотрим одноканальный прием, т.е. прием на единственный
антенный элемент (М=1) и определим время-частотные характеристики
помехи. В отсутствие поезного сигнала помеху опишем функцией y(t)=n(t).
В любой фиксированный момент времени ti мгновенное значение помехи
y=y(ti) является случайной величиной, распределенной по нормальному
закону
1
𝑃 𝑦
√2𝜋𝜎
exp
𝑦 ⁄2𝜎
(П.2.1)
σ2 – независящая от ti дисперсия стационарного процесса.
Автокорреляционная функция (АКФ) процесса y(t) имеет вид
𝑀у 𝑦 𝑡 𝑦 𝑆 ,
𝜑 𝑡, 𝑆
(П.2.2)
где М [] означает операцию усреднения.
Для
𝜑 𝑡, 𝑆
стационарных
𝜑 𝑡
𝑆
процессов
𝜑 𝜏 и𝜑 0
она
удовлетворяет
условиям:
𝜎 , т.е. является постоянной величиной
при фиксированном значении t.
Согласно теореме Винера-Хинчина АКФ связана с энергетическим
спектром помехи парой преобразований Фурье
𝑔 𝑓
𝑁 𝑓
𝜑 𝜏
Напомним,
что
𝜑 𝜏 exp
𝑗2𝜋𝑓𝜏 𝑑𝜏
𝑔 𝑓 exp 𝑗2𝜋𝑓𝜏 𝑑𝑓
понятия
«амплитудно-частотный»
(П.2.3а)
(П.2.3б)
и
«фазо-
частотный» спектры помехи как случайного процесса не имеют
физического смысла. Кроме того, в отличие от «математического» спектра
375
(П.2.3а) реальный физический спектр не может иметь отрицательных
частот. В связи с этим обычно полагают: 𝑔 𝑓
, где
-
односторонний энергетический спектр при f > 0. С учетом также свойства
четности функции 𝜑 𝜏 формулы (П.2.2) принимают вид:
𝜑 𝜏
𝑔
𝑓
2
𝑔
𝜑 𝜏 𝑒
𝑓 cos 2𝜋𝑓𝜏𝑑𝑓
(П.2.4а)
𝑑𝜏
(П.2.4б)
4
𝜑 𝜏 cos 2𝜋𝑓𝜏𝑑𝜏
Реализацию радиопомехи можно представить в виде гармонического
колебания, случайно модулированного по амплитуде и фазе
𝑦 𝑡
𝑌 𝑡 cos 2𝜋𝑓 𝑡
𝜑 𝑡 ,
(П.2.5)
где 𝑌 𝑡 и 𝜑 𝑡 – случайные стационарные процессы.
Раскрывая косинус разности в (П.2.5), это выражение примет вид
𝑦 𝑡 𝑐𝑜𝑠2𝜋𝑓 𝑡
𝑦 𝑡
где
𝑦 𝑡
𝑦 𝑡
𝑦 𝑡 𝑠𝑖𝑛2𝜋𝑓 𝑡,
(П.2.6)
𝑌 𝑡 cos𝜑 𝑡 – синфазная амплитуда,
𝑌 𝑡 s𝑖𝑛𝜑 𝑡 – квадратурная амплитуда.
Амплитуды 𝑦 𝑡
и 𝑦 𝑡
можно выделить на выходе двух
перемножителей на входы которых подается реализация y(t), а в качестве
опорных используются гармонические колебания 𝑐𝑜𝑠2𝜋𝑓 𝑡 и 𝑠𝑖𝑛2𝜋𝑓 𝑡,
соответственно (см. рис. П.2.1).
Х
ФНЧ
Х
ФНЧ
yс t
синфазная
амплитуда
ys t
квадратурная
апмлитуда
y t
2𝑐𝑜𝑠2𝜋𝑓0 𝑡
𝜑
90°
2𝑠𝑖𝑛2𝜋𝑓0 𝑡
Рис. П. 2.1
Реальная и мнимая части комплексной амплитуды с точностью до
знака совпадают с квадратурными амплитудами
376
𝑅𝑒𝑌 𝑡
𝑌 𝑡
𝑗𝐼𝑚𝑌 𝑡
𝑦 𝑡
𝑗𝑦 𝑡 ,
(П.2.7)
которые выделяются на выходе фильтров низкой частоты.
Для
статистического
описания
случайного
процесса
вводят
комплексную корреляционную функцию 𝛷 (t,s). Для ее отыскания
используем равенство
𝑦 𝑡
⁄
𝑌∗ 𝑡 𝑒
𝑌 𝑡 𝑒
(П.2.8)
Подставляя (П.2.8) в (П.2.2), получим
𝜑 𝑡, 𝑠
𝑌 𝑡 𝑌∗ 𝑠
𝑅𝑒 𝑀п
𝑒
2
(П.2.9)
𝑌 𝑡 𝑌∗ 𝑠
𝑅𝑒 𝑀п
𝑒
2
Для определения Φ 𝑡, 𝑠 из (П.2.9) воспользуемся усреднением по
времени на интервале T, где помеха полагается стационарной
Второе слагаемое в (П.2.10) содержит быстроосциллирующий
множитель 𝑒
𝜑 𝑡
. Поэтому при медленно
𝑆
𝜑 𝜏
lim 𝑅
→
𝑌 𝑡 𝑌∗ 𝑡
𝑒
𝜏 𝑑𝑡/2𝑇
(П.2.10)
𝑅
𝑌∗ 𝑡 𝑌∗ 𝑡
𝑒
𝜏 𝑒
𝑑𝑡/2𝑇
изменяющихся функциях Y(t) и Y(t-τ) за период радиочастоты,
равной 𝑇
1/𝑓 , он имеет практически нулевое значение. Тогда АКФ в
(П.2.10) определяется только первым слагаемым
𝜑 𝑡
где
𝛷 𝜏
𝑙𝑖𝑚
→
𝑌 𝑡 𝑌∗ 𝑡
𝑅𝑒 𝛷 𝜏 𝑒
,
𝜏 𝑑𝑡/2𝑇
𝑀
(П.2.11)
∗
–
комплексная
корреляционная функция огибающей Y(t).
При этом энергетический спектр помехи определяется обычным
путем – соотношением Винера-Хинчина.
377
𝐺п 𝑓
𝛷 𝜏 𝑒
𝑑𝜏
(П.2.12)
Таким образом, и корреляционная функция и энергетический спектр
комплексной
огибающей
совпадают
с
соответствующими
характеристиками синфазной и квадратурной амплитуд.
П.2.2 Статистические характеристики дискретизированных помех.
Возможность дискретного представления помехи, как и сигнала,
следует из теоремы Котельникова. Поскольку помеха аддитивна по
отношению к сигналу, то ее дискретные отсчеты yi=y(t-iΔt) не зависят от
сигнала и в общем случае могут быть коррелированы.
Дискретизация принимаемых колебаний может быть реализована как
на радио, так и на видеочастотах. Особенностью дискретизации на
радиочастоте f0 является малый интервал дискретизации Δt=1/2f0=T0/2,
где Т0 – период радиочастоты. Дискретные значения такой радиопомехи
можно представить в виде вектор-столбца y=‖y(iΔt)‖, 𝑖 ∈ 1, 𝐿, L=T/Δt, т.е.
определяется длиной интервала наблюдения Т.
Для
помехи,
распределенной
по
нормальному
закону,
исчерпывающей характеристикой вектора y является корреляционная
матрица (КМ) φ=‖φik‖=Mn‖yiyk‖=Mn(yyT).
Часто элементы φik КМ представляются в нормированном виде:
𝜌 ⁄𝜎𝜎 ,
𝜑
(П.2.13)
где σi, σk – среднеквадратические значения отсчетов
𝑀 𝑦𝑦
𝜌
(П.2.14)
𝑀 𝑦 𝑀 𝑦
Нормированный коэффициент взаимных корреляций отсчетов.
Многомерная плотность вероятности (ПВ) распределения значений
отсчетов описывается выражением
𝑝 𝒚
2𝜋
⁄
|𝝋|
/
exp
378
𝒚 𝝋
𝒚⁄2 ,
(П.2.15)
где |𝝋| – дискриминант КМ, 𝝋
𝟏
– матрица, обратная КМ 𝝋.
Для белого и квазибелого шумов можно считать соседние значения
отсчетов помех не коррелированными. В этом случае КМ φ и ей обратная
матрица являются диагональными: 𝝋
𝑰
𝑑𝑖𝑎𝑔 𝜎
,𝝋
𝑑𝑖𝑎𝑔 1⁄𝜎
.
Тогда после их подстановки в (П.2.15) получим
𝑝 𝒚
2𝜋
⁄
𝜎
/
exp
𝑦 /2𝜎
(П.2.16)
Заметим, что в частном случае стационарной помехи 𝜎
𝜎 ,
формула (П.2.16) упрощается
𝑝 𝒚
2𝜋𝜎
⁄
exp
1
2𝜎
𝑦
(П.2.17)
Возможность дискретизации на видеочастоте определяется тем, что
любое
принятое
радиочастотное
колебание
описывается
двумя
квадратурными колебаниями yc(t) и ys(t) (П.2.17). Поэтому дискретизация
на видеочастоте осуществляется на выходе обоих квадратурных каналов.
Поскольку максимальная частота спектра видеопомех yc,s(t) составляет
fmax=Δfn/2, то период дискретизации равен Δtд=1/Δfn. На первый взгляд
кажется, что такая частота дискретизации в два раза ниже, требуемой по
теореме Котельникова. Однако здесь не следует забывать, что создаются
две квадратуры, а, следовательно, количество отсчетов сохраняется.
Дискретные значения видеопомехи оцениваются двумя случайными
вектор-столбцами yc,s=‖yc,s i‖, i1
векторов
yc,s
описывается
𝐿. При этом каждый из случайных
нормальной
вероятности pn(yc) и pn(ys) вида (П.2.15).
379
многомерной
плотностью
П.2.3 Статистические характеристики помех при
многоканальном приеме.
В
случае
многоканального
приема,
например,
М-элементной
антенной решеткой (АР) статистика аналоговых помех определяется
матрицей корреляционных функций между каналами приема
‖𝜑
𝝋 𝑡, 𝑠
𝑡, 𝑠 ‖, 𝜑
𝑡, 𝑠
𝑀 𝑦 𝑡 𝑦 𝑠
(П.2.18)
Диагональным элементом матрицы (i=k) соответствуют АКФ
принимаемых помеховых колебаний в соответствии с (П.2.2). Элементы
матрицы, не принадлежащие ее главной диагонали 𝜑
𝑡, 𝑠 , при 𝑖
𝑘,
соответствуют взаимно корреляционной функции (ВКФ) каналов. Если
помехи между каналами не коррелированы, то при i k 𝜑
𝑡, 𝑠
0. Этот
случай соответствует наличию только внутренних шумов при отсутствии
внешних источников помех.
Преобразование Фурье ВКФ стационарного процесса
𝑔
𝑓
𝜑
𝜏 exp
𝑗2𝜋𝑓𝜏 𝑑𝜏
(П.2.19)
называют взаимным энергетическим спектром. Справедливо также
обратное преобразование Фурье
Наряду
𝜑
𝜏
𝑔
с
действительной
𝑓 exp 𝑗2𝜋𝑓𝜏 𝑑𝑓
формой
представления
(П.2.20)
матрицы
корреляционных функций часто используют комплексную форму. В этом
случае матрица корреляционных функций имеет вид
𝜱 𝑡, 𝑠
‖𝛷
𝑡, 𝑠 ‖, 𝛷
𝑡, 𝑠
𝑀 𝑌 𝑡 𝑌 ∗ 𝑠 /2
(П.2.21)
Здесь Yi,k(t) – комплексная амплитуда помехового колебания,
принятого i-ым и k-тым каналами. Диагональные элементы матрицы
(П.2.21) определяются выражением (П.2.10), а для стационарных помех попрежнему имеем 𝜱 𝑡, 𝑠
𝜱 𝜏 , τ=t-s. По аналогии с (П.2.19) введем в
380
рассмотрение взаимный энергетический спектр для комплексной функции
𝜱
𝜏 :
𝑓
𝐺
При
дискретном
𝛷
𝜏 exp
описании
𝑗2𝜋𝑓𝜏 𝑑𝜏
помех
принимаемая
(П.2.22)
реализация
y(t)=‖yi(t)‖, 𝑖 ∈ 1, 𝑀 в каждом из М каналов приема описывается вектором
𝒚
𝑦
. Его элементами являются значения функции yi(t) в дискретные
моменты времени tk=kΔt, k1, 𝐿. При наличии М каналов приема общее
число дискрет составит Qд=МL. После перенумеровки этих дискрет от 1
до Q, принимаемому колебанию y(t) будет соответствовать вектор,
состоящий из Q компонент y=‖yq‖, q1, 𝑄 .
Если распределение дискрет подчиняется нормальному закону, то их
статистические
свойства
полностью
описываются
плотностями
вероятностей (П.2.15) и (П.2.16).
По сравнению со случаем одноканального приема размерность
векторов y или Y возрастает в М раз. Тогда после дискретизации
комплексных амплитуд выражение для плотности вероятности примет вид
𝑃 𝒀𝒀
∗
4𝜋
𝜱
𝑒𝑥𝑝
𝒀∗ 𝜱 𝒀
2
(П.2.23)
где Y=‖𝑌 ‖, q1, 𝑄, Φ=‖𝛷 ‖=𝑀 Y Y ∗ /2 , i,k1, 𝑄.
Представленные в данном разделе соотношения имеют важное
значение в теории обнаружения сигналов на фоне помех (см. разделы 3 и
5).
381
ПРИЛОЖЕНИЕ 3
Приближенное вычисление интегралов
Рассмотрим возможность приближенного вычисления интеграла от
произведения узкополосных высокочастотных ∆𝑓 ≪ 𝑓
колебаний y(t) и
x(t), т.е. интеграла вида
y(t)x(t) dt.
(П.3.1)
Для этого представим колебания через их комплексные амплитуды и
фазовые множители
X2(t ) e
Y (t ) j 2f0t Y (t ) j 2f0t
j 2f 0t
y (t ) Re Y (t ) e
e
e
.
2
2
x (t ) Re X (t ) e j 2f 0t
j 2 f 0 t
(П.3.2)
X (t ) j 2f 0t
e
.
2
(П.3.3)
В (П. 3.2) и (П. 3.3) использовано равенство, вытекающее из формулы
Эйлера
Re e
j
e j e j
.
2
Произведение y(t)x(t) сводится к сумме четырех одночленов, которая
разбивается на парные суммы комплексно-сопряженных одночленов. Эти
пары имеют вид
1
1
1
Y (t ) X (t ) Y (t ) X (t ) Re Y (t ) X (t ) ,
4
4
2
(П.3.4)
(П.3.5)
(П.3.6)
1
1
1
Y (t ) X (t ) e j 4f0t Y (t ) X (t ) e j 4f0t Re Y (t ) X (t ) e j 4f0t ,
4
4
2
а это означает
y (t ) x (t )
1
1
Re Y ( t ) X ( t ) Re Y ( t ) X ( t ) e j 4 f 0 t
2
2
Первое слагаемое в (П. 3.6) не содержит высокочастотного
множителя, а второе включает быстроосцилирующий множитель 𝑒
382
.
Интегралом от второго слагаемого можно пренебречь, поскольку
интегралы от каждой из двух соседних его полусинусоид (рис. П.3.1, б)
имеют противоположный знак и, в основном, взаимно компенсируются.
Таким образом, имеем
1
y (t ) x (t ) dt 2 Re Y (t ) X (t ) dt .
Re{Y(t)X(t)exp
(j4 f0t)}
*
Re{Y(t)X
(t)}
t1
(П.3.7)
t2
t
t2 t
t1
1/2f0
а
б
Рис. П. 3.1. К выводу формулы (П.3.7)
Это соотношение используют при переходе от алгоритмов обработки
мгновенных значений к алгоритмам обработки комплексных амплитуд.
При этом на практике слагаемое с быстроменяющимся множителем в
(П.3.7) как правило, отфильтровываются ФНЧ.
383
ПРИЛОЖЕНИЕ 4
Связь огибающей выходного напряжения согласованного
фильтра с модулем комплексного корреляционного интеграла
Покажем
соответствие
согласованного
фильтра
корреляционного
огибающей
модульному
интеграла.
В
напряжения
значению
процессе
на
выходе
комплексного
доказательства
такого
соответствия будем использовать приближенное равенство (см. (П. 3.7))
1
y
(
t
)
x
(
t
)
dt
Re
Y
(
t
)
X
(
t
)
dt
.
2
(П.4.1)
Интеграл свертки
w(t ) y(s)v(t s) ds
по аналогии с (П. 4.1) представим в виде
1
w ( t ) Re Y ( s ) V ( t s ) e j 2 f 0 t ds Re W ( t ) e j 2 f 0 t .
2
(П.4.2)
Исходя из (П. 4.2), комплексная амплитуда выходного напряжения
фильтра W (t ) представляется следующим образом:
1
W (t ) Y (s)V (t s) ds.
2
(П.4.3)
В свою очередь, импульсная характеристика согласованного фильтра
с точностью до постоянного множителя (С) имеет вид
Vсогл (t ) X (t 0 t ) e j 2ft0 .
(П.4.4)
Подставим (П. 4.4) в (П. 4.3), возьмем модули от обеих частей
равенства и при t t0 t з получим
𝑊 𝑡
𝑡
𝑊 𝑡
𝑡
1
2
𝑌 𝑠 𝑋∗ 𝑠
384
𝑡 𝑑𝑠
𝑍 𝑡
𝑍 𝑡 .
Таким образом, огибающая напряжения на выходе согласованного
фильтра W(t) в момент времени 𝑡
𝑡з при 𝐶
1 равна модульному
значению комплексного корреляционного интеграла 𝑍 𝑡
385
|𝑍 𝑡 |.
ПРИЛОЖЕНИЕ 5
Энергетические потери квазисогласованной фильтрации
прямоугольного радиоимпульса без внутриимпульсной модуляции
по сравнению с согласованной фильтрацией
Фильтр, согласованный с прямоугольным радиоимпульсом без
внутриимпульсной
модуляции,
имеет
амплитудно-частотную
характеристику вида sin x / x . На практике иногда применяют более простой
квазисогласованный
фильтр,
амплитудно-частотная
характеристика
которого отличается от АЧХ согласованного фильтра и является,
например,
прямоугольной
(см.
рис.4.16).
Отличие
характеристик
квазисогласованного и согласованного фильтров приводит к потерям в
отношении сигнал/шум при квазисогласованной фильтрации.
Пусть квазисогласованный фильтр имеет прямоугольную единичную
АЧХ с полосой ∆𝑓 и линейную фазочастотную характеристику e j 2ft0 . На
вход
такого
квазисогласованного
прямоугольный
радиоимпульс
полосового
фильтра
единичной
поступает
амплитуды
без
внутриимпульсной модуляции, имеющий спектральную плотность
g( f )
1 sin ( f f 0 ) и 1 sin ( f f 0 ) и
.
2 ( f f0 )
2 ( f f0 )
(П.5.1)
Используя формулу (3.96) фильтрации в частотной области и
соотношение (П. 5.1), напряжение на выходе фильтра можно представить
следующим образом:
∆
𝑤 𝑡
1
2
𝑠𝑖𝑛𝜋 𝑓
𝜋 𝑓
∆
𝑓 𝜏
𝑒
𝑓
∆
1
2
∆
𝑠𝑖𝑛𝜋 𝑓
𝜋 𝑓
386
𝑓 𝜏
𝑒
𝑓
𝑑𝑓
Это соотношение, после замены переменных 𝜋 𝑓
первом интеграле и 𝜋 𝑓
𝑓 𝜏и
𝑓 𝜏и
𝑥 в
𝑦 – во втором интеграле, приводится к
виду
𝑤 𝑡
𝑊 𝑡 𝑐𝑜𝑠2𝜋𝑓 𝑡,
где
∆
1
𝜋
𝑊 𝑡
∆
/
/
sin 𝑥
𝑒
𝑥
∆ /
2
𝜋
𝑑𝑥
𝑡 𝑡
sin 𝑥
cos 2𝑥
𝑥
𝜏
𝑑𝑥.
Преобразуя произведение тригонометрических функций и вводя в
формулы интегральный синус получим sin 𝑦
1
𝑆𝑖 𝜋∆𝑓 𝑡
𝜋
𝑊 𝑡
𝜏
2
𝑡
𝑑𝑥, получим
𝑆𝑖 𝜋∆𝑓 𝑡
𝜏
2
𝑡
(П.5.2)
Огибающая напряжения сигнала достигает максимума в момент
𝑡 , когда 𝑊 𝑡
времен 𝑡
0.
Учитывая,
Si 𝑦
что
sin 𝑦 /𝑦
получим
𝑊
𝑆𝑖 𝜋∆𝑓𝜏 /2 .
Дисперсия шума на выходе квазисогласованного полосового фильтра
составит
∆
𝜎ш
𝑁 𝑑𝑓
𝑁 ∆𝑓
∆
Тогда
отношение
сигнал/шум
на
выходе
рассматриваемого
квазисогласованного фильтра представляется следующим образом:
𝑊
𝜎ш
𝑞ксф
где
𝑞сф
Э
и
–
𝑞сф
𝑆𝑖
∆
𝜋/2 ∆𝑓𝜏
отношение
сигнал
𝑞сф 𝛼.
–
шум
на
выходе
согласованного фильтра (с учетом единичной амплитуды сигнала), 𝑎
– коэффициент потерь.
387
1
ПРИЛОЖЕНИЕ 6
Условия разделение пространственно-временной обработки на
пространственную и временную
В подразделе 4.4 введена в рассмотрение многомерная функция
рассогласования (ФР) по дальности, скорости и угловым координатам.
Определим условия, при которых можно разделить обработку на частотновременную и пространственную, если в РЛС используется дисперсионная
линейная ФАР, возбуждаемая широкополосным (немонохроматическим)
сигналом. Формально это означает поиск границ корректности (4.40).
Для решения поставленной задачи воспользуемся известным из
литературы принципом пространственно-частотной эквивалентности
(ПЧЭ). Удобство этого принципа при расчете ФР заключается в
возможности перехода из частотной области в пространственную и далее
воспользоваться теорией антенных решеток для монохроматических
сигналов.
Пусть сигнал с полосой f возбуждает дисперсионную линейную Мэлементную ФАР с углового направления θ0. Частотные свойства ФАР
можно описать ЧХ эквивалентного фильтра (ЭФ) с параметрами,
зависящими от угловых координат (в линейном случае – от угла θ). В этих
условиях ФР 4.43б может быть переписана в следующем виде
𝜒 , 𝐹д , θ
где 𝐻Э 𝑓
1
2
𝐺 𝑓 𝐺∗ 𝑓
𝐹д 𝐻Э 𝑓
𝐹д , θ 𝑒𝑥𝑝 𝑗2𝑓 𝑑𝑓 , (П.6.1)
𝐹д , θ – ЧХ ЭФ, которую в дальнейшем можно полагать не
зависящей от доплеровского сдвига частоты 𝐹д =0.
Дисперсионные свойства ФАР с установкой фазы с точностью до 2
проявляются в виде эффекта угло-частотной чувствительности луча, т.е.
зависимости положения луча от частоты. Заметим, что дисперсионный
эффект в ФАР можно устранить, используя управляемые линии задержки,
388
которые из-за своей громоздкости и больших активных потерь крайне
редко применяются на практике. Величина смещения луча от заданного
значения θ0 определяется соотношением: θ
sin θ , где =f/f0 –
расстройка по частоте относительно f0.
ЧХ фильтра, связанная с этим эффектом для M-элементной ФАР,
будет иметь вид:
𝐻Э 𝑓, θ
∑
𝐴 𝑒𝑥𝑝 𝑗
𝑑
sin θ
1
sin θ
,
(П.6.2)
где Аm, dm – амплитуда возбуждения и координата m-го излучателя
соответственно.
Формально принцип ПЧЭ заключается в том, что при проведении
вычислений по формуле П6.1 интегрирование по частоте можно заменить
интегрированием по пространству. Для этого в П6.2 проведем замену
переменных f=f0(1+у/dm), что соответствует переходу от переменной
частоты f к пространственно-протяженной координате y вместо точечной
координаты dm.
Благодаря этому приему, ФР при 𝐹д =0 с учетом П6.2 с точностью до
быстроменяющегося
множителя
exp(j2f0)
можно
представить
выражением:
𝜒 , 𝐹д
0, θ
𝐴 𝐹 θ, 𝑒𝑥𝑝 𝑗
2𝑓
𝑑 sin θ ,
𝑐
(П.6.3)
где
𝐴
𝐴 𝑒𝑥𝑝 𝑗
2𝑓
𝑑 sin θ
𝑐
– АФР, обеспечивающее сканирование луча на угол θ0,
389
(П.6.4)
𝐹 θ,
1
𝑑
1
𝑒𝑥𝑝 𝑗2𝑓
𝑦
𝑑
𝑦
sin θ
𝑐
𝐺
2𝑓 1
𝜏𝑐
𝑑
𝑦
𝑑
(П.6.5)
𝑑𝑦
– парциальная ДН m-го эквивалентного линейного излучателя (ЭЛИ)
длиной lэm= dm.
𝐺
𝑦 – амплитудное распределение вдоль координаты у m-ого ЭЛИ,
повторяющее по форме спектр возбуждающего сигнала на выходе СФ.
В формулах П6.3 и П6.5 значение углового рассогласования θ
отсчитывается от направления θ0.
Выражению П6.3, полученному на основе принципа ПЧЭ, можно
дать следующую интерпретацию. ДН ФАР точечных излучателей на
выходе СФ возбуждающего ее широкоплосного сигнала в момент
возникновения его максимума (=0) эквивалентна ДН ФАР, состоящей из
неидентичных
монохроматическом
пространственно-протяженных
возбуждении.
Эквивалентность
иллюстрирует Рис. П. 6.1.
390
ЭЛИ
при
этих
решеток
широкополосный
сигнал
узкополосный
сигнал
θ
θ
∑
∑
Согласованный
фильтр Δf
Эквивалентные
ДН
Фильтр f0
χ(0, Δθ)
F(Δθ)
Рис. П. 6.1. Обобщение принципа пространственно-частотной
эквивалентности
Определим свойства и характеристики ЭЛИ, из которых состоит
эквивалентная в указанном смысле АР. Согласно П6.4 парциальные ДН
ЭЛИ 𝐹 θ, по своей форме повторяют автокорреляционную функцию
сигнала, поскольку спектр сигнала и его ширину на выходе СФ можно
рассматривать как форму амплитудного распределения по раскрыву ЭЛИ
с точностью до множителя 1
1.
Зависимость ориентации парциальных ДН ЭЛИ от времени имеет
следующий физический смысл. В момент времени =0 все ДН 𝐹 θ, 0
ориентированы в направлении нормали к эквивалентной АР. При
рассогласовании направления сигнала на θ 𝐹 ΔΘ, Δ𝜏 представляет собой
«мгновенную» ДН АР для заданного значения Δ𝜏. При 𝐹 θ, 0
максимумы
sin θ
,∆
ДН
ЭЛИ
ориентированы
в
различные
направления
𝑐/𝑑 , что приводит к потерям при когерентном сложении
391
их выходных сигналов. Таким образом, зависимость ДН ЭЛИ от
определяет боковые лепестки сигнала по времени в сечениях ∆Θ
const.
На рисунке П6.2 показаны парциальные ДН ЭЛИ, ширина которых
зависит от полосы сигнала f и порядкового номера m. При 𝑓 ∞ все
парциальные ДН, кроме нулевого (m=0), будут стремиться к -функции.
Поэтому во всех угловых направлениях θ0 излучение «эквивалентной»
АР будет изотропным. В другом предельном «узкополосном» случае
𝑓 0 «эквивалентная» АР трансформируется в иходную АР точечных
излучателей.
χm(Δτ=0, θ, θ0)
1
X0
XM/2
АР с линиями
задержки
АР с фазовращателями
Xm
Xp
Xp
Xm
p>m
-θ0
0
θ0
θ
Рис. П. 6.2. Парциальные ДН ЭЛИ.
Таким образом, принцип ПЧЭ представляет собой метод вычисления
структуры многомерной ФР и открывает возможность исследовать ее
характеристики в зависимости от совокупности параметров ФАР и
сигнала. В частности зависимость потерь ОСШ на выходе СФ от
обобщенных параметров:
sin θ
и
θ , град
𝑇 θ
(П.6.6)
может служить критерием разделения обработки на пространственную и
временную. Здесь – относительная ширина полосы сигнала в %; θ
392
,
–
ширина ДН ФАР по уровню половинной мощности на центральной частоте
спектра 𝑓 , 𝑇 θ
𝑠𝑖𝑛θ – время заполнения апертуры длиной La с
направления θ0.
Если 𝜀, 𝜀
≪ 1, то потери, вызванные дисперсионными свойствами
ФАР, лежат в пределах 0 0,6 дБ и ими можно пренебречь. Пренебрежимо
малыми
по
сравнению
с
«монохроматическим»
возбуждением
оказываются также искажения ДН и сжатого сигнала. Поэтому в этом
случае обработка может быть разделена на частотно-временную и
пространственную, которые рассматриваются независимо.
393
ПРИЛОЖЕНИЕ 7
Минимизация мощности помехи при оптимальной обработке
В оптимальном многоканальном обнаружителе (см. п. 5.1, рис. 5.2, а,
б) в векторно-матричном перемножителе вектор отсчетов принимаемого
yT
колебания 𝐲 размера 𝐾
ηi
матрицу 𝛗
(размерности 𝐾
𝐾), обратную
корреляционной (положительно определенной)
ψi
матрице
Рис. П. 7.1. Векторный
перемножитель
помехи
перемножитель
весового
𝛗.
Векторно-матричный
состоит
из
𝐾
весовых
сумматоров (рис. 5.2, б), т.е. из 𝐾 скалярных
векторных
коэффициенты
𝑀𝐿 перемножается на
перемножителей.
сумматора,
т.е.
скалярного
Весовые
векторного
перемножителя (рис. П.5.1)) определяются элементами i- го столбца 𝛙
матрицы 𝛙
𝛗 .
Докажем, что каждая из помеховых составляющих 𝜼П вектора
𝛈
𝛗 y
на
выходе
векторно-матричного
перемножителя
имеет
минимальную дисперсию (мощность) для заданной помеховой обстановки
при фиксированном значении 𝜓 . Фиксация 𝜓
решение 𝜓
исключает тривиальное
0. (замирание канала).
Дисперсия (мощность) помеховой составляющей 𝛈П выходного
эффекта 𝛈
𝜎
𝛙 𝐲 i- го весового сумматора определяется в виде
𝑀п 𝛈
Поскольку 𝛗𝛙
𝑀 𝛈п
𝑀 𝛙 𝐲𝐲𝛙
(П.7.1)
𝐈, по определению, следовательно –
𝛗𝛙
где 𝐼
𝛙 𝛗𝛙 .
𝐈,
(П.7.2)
𝑖 - й К-мерный столбец единичной матрицы 𝑰, у которого i - й
элемент равен единице, а остальные элементы раны нулю.
Введем обозначения
𝐀
𝛗, 𝐈
𝐁, 𝐀
𝛗
394
𝛙
(П.7.3)
и воспользуемся известным результатом теории матриц. Из нее
известно, что неоднородная квадратичная форма
𝑄 𝐋
𝐋 𝐀𝐋
2𝐋 𝐁
(П.7.4)
с положительно определенной матрицей A минимизируется (𝑄 𝑳 → 𝑚𝑖𝑛),
если
𝐋
𝐀 𝐁
(П.7.5)
Положим
𝐋
𝛙𝐈
𝛙,
(П.7.6)
то согласно (П. 7.4), (П. 7.3), (П. 7.1) можно показать
𝐋 𝐀𝐋
𝟐𝐋𝐁
𝛙 𝛗𝛙
2𝛙 𝐈
𝜎
2𝜓
𝑚𝑖𝑛.
(П.7.7)
Поскольку значение 𝜓 по условию фиксировано, то согласно (П.
7.7) в (П.7.1) обеспечивается минимум 𝜎
Таким образом, показано, что при выборе вектора весовых
коэффициентов в i - м векторном перемножителе Рис. 5.2, равным i - му
столбцу 𝛙 матрицы 𝛙, помеховая составляющая 𝛈П выходного эффекта
имеет минимально возможную дисперсию при фиксированном ненулевом
значении 𝜓 .
395
ПРИЛОЖЕНИЕ 8
Определение комплексного весового вектора
и вещественного параметра обнаружения
Интегрально-матричное уравнение для определения вещественного
весового вектора 𝐫 𝑡 (вектор столбца мгновенных значений канальных
𝑟 𝑡 весовых функций) имеет вид
𝛗 𝑡, 𝑠 𝐫 𝑠 𝑑𝑠
𝐱 𝑡 .
(П.8.1)
Из этого уравнения получим интегрально-матричное уравнение
комплексного весового вектора R(t) (весового
вектора комплексных
амплитуд). Для этого воспользуемся формулой (П. 3.7):
𝑎 𝑡 𝑏 𝑡 𝑑𝑡
1
Re
2
𝐴 𝑡 𝐵∗ 𝑡 𝑑𝑡
(П.8.2)
и связью корреляционных матриц-функций мгновенных значений и
комплексных амплитуд (см. П.2.11)
𝛗 𝑡, 𝑠
(П.8.3)
Re 𝚽 𝑡, 𝑠 𝑒
Перепишем (П. 8.3) в виде
𝛗 𝑡, 𝑠
Re 𝚽 𝑡, 𝑠 𝑒
𝑒
(П.8.4)
Считая выражение в квадратных скобках (П. 8.4) комплексной
амплитудой при 𝑒
𝛗 𝑡, 𝑠 𝐫 𝑠 𝑑𝑠
с учетом 8.1 и 8.2 запишем
1
Re
2
𝚽 𝑡, 𝑠 𝐑 𝑠 𝑑𝑠 𝑒
Re 𝐗 𝑡 𝑒
𝑥 𝑡
Отсюда при произвольных значениях комплексных множителей
𝑒
получим интегрально-матричное уравнение для комплексных
амплитуд
1
2
𝚽 𝑡, 𝑠 𝐑 𝑠 𝑑𝑠
𝐗 𝑡 .
396
(П.8.5)
Выражения для параметра обнаружения 𝑞
можно получить из
формулы для весового интеграла
1
Re
2
𝜉
𝐘 𝑡 𝐑 𝑡 𝑑𝑡
заменой 𝐘 𝑡 на 𝐗 𝑡 , т.е.
1
Re
2
𝑞
𝐗 𝑡 𝐑 𝑡 𝑑𝑡
(П.8.6)
Знак реальной части в (П.8.6) может быть опущен, исходя из того,
что интеграл
𝐗 𝑡 𝐑∗ 𝑡 𝑑𝑡
𝛾
(П.8.7)
является вещественным числом. Докажем это, подставив в (П.8.7) вместо
X (t ) уравнение (П. 8.5):
1
𝐑 𝑠 𝚽 𝑡, 𝑠 𝐑∗ 𝑡 𝑑𝑡 𝑑𝑠
2
𝛾
Поскольку 𝛾 является скаляром, то 𝛾
(П.8.8)
𝛾 . Теперь найдем выражения
для 𝛾 ,
𝛾∗
1
𝐑 𝑡 𝚽 ∗ 𝑡, 𝑠 𝐑∗ 𝑠 𝑑𝑡 𝑑𝑠
2
1
𝐑 𝑡 𝚽 𝑠, 𝑡 𝐑∗ 𝑠 𝑑𝑡 𝑑𝑠
2
1
𝐑 𝑠 𝚽 𝑡, 𝑠 𝐑∗ 𝑡 𝑑𝑡 𝑑𝑠
2
𝛾,
что и требовалось доказать.
Здесь учтено, что по определению 𝚽 ∗ 𝑡, 𝑠
𝚽 𝑠, 𝑡 .Таким образом,
выражение (П. 8.6) для параметра обнаружения можно представить в виде
𝑞
1
Re
2
𝐗 𝑡 𝐑∗ 𝑡 𝑑𝑡,
и тогда знак реальной части в (П. 8.6) может быть опущен.
397
(П.8.9)
ПРИЛОЖЕНИЕ 9
Оценка эффективности оптимальной обработки
Покажем, что при отсутствии угловых различий между целью и
постановщиком АШП (сигнал и помеха воздействуют по максимуму
основного лепестка ДН АР, см. рис. 5.26) отношение сигнал/помеха (ОСП)
на выходе устройства оптимальной обработки 𝑞опт не хуже, чем
аналогичное отношение на его входе 𝑞вх . Это означает, что оптимальная
обработка не может ухудшить входное ОСП, что особенно важно в
условиях слабых помех.
Будем полагать, что коэффициент междуканальной корреляции
помехи (АШП + внутренний шум) 𝜌
АР имеем Рс
Рш ,
РАШП
Рш
1. Пусть на входе одного элемента
ℎ ≫ 1, Рп
РАШП
Рш ,
Рп
Рс
ℎ, где РАШП , Рш , Рс –
мощности АШП, внутреннего шума и сигнала.
Тогда на входе M-элементной АР отношение ОСП по мощности
равно
𝑞вх
Рс
Рп
1
.
ℎ
(П.9.1)
На выходе линейной части устройства оптимальной обработки
отношение сигнал-помеха 𝑞опт при |𝜌 𝜈, 𝛼 |
1 и 𝑀 ≫ 1 в соответствии с
(5.76), (5.77) равно
𝑞опт
где 𝑞
2Э /𝑁
1
𝑞
ℎ
(П.9.2)
– отношение сигнал/помеха, реализуемое за счет
временного накопления (в согласованном фильтре) сигнала на фоне белого
внутреннего шума, Э – энергия сигнала в одном элементе АР; множитель
1/ℎ
характеризует
эффективность
оптимальной
пространственной
обработки для рассматриваемой ситуации.
Поскольку по условию Рс
сигнала 𝑞
Рш , то за счет временного накопления
1.
398
Таким образом, анализ соотношений (П. 9.1) и (П. 9.2) показывает,
что для неблагоприятной ситуации совпадения угловых направлений на
цель и постановщик АШП, оптимальная пространственная обработка не
ухудшает выходное отношение сигнал – помеха по сравнению с входным.
При этом за счет временного накопления в согласованном фильтре можно
обеспечить выполнение неравенства 𝑞опт
𝑞вх .
При наличии угловых различий между целью и постановщиком
помех
𝑞опт
1
𝑀ℎ
|𝜌 𝜈, 𝛼 |
1 𝑀ℎ сп
Например, при 𝑀 ≫ 1 и |𝜌сп 𝜈, 𝛼 |
𝑞опт
𝑀𝑞
𝑞вх .
0,5 получим
0,5𝑀𝑞 .
Из сравнения данного равенства с равенством (П. 9.1) видно, что
оптимальная пространственная обработка повышает отношение сигналпомеха и не может его ухудшить.
399
ПРИЛОЖЕНИЕ 10
Определение весового вектора при оптимальном
обнаружении – разрешении
При оптимальном обнаружении – разрешении корреляционную
матрицу-функцию представим в виде (см.6.12)
𝚽 𝑡, 𝑠
𝑁𝛿 𝑡
𝑠 𝐈
1
𝐗 𝑡, 𝛂 𝐗 ∗ 𝑠, 𝛼
2
(П.10.1)
Подставим (П. 10.1) в интегрально-матричное уравнение (5.42)
1
𝑁𝐈
2
𝛿 𝑡
𝑠 𝐑 𝑠 𝑑𝑠
1
𝐗 𝑡, 𝛼
4
𝐗 ∗ 𝑠, 𝛼 𝐑 𝑠 𝑑𝑠
(П.10.2)
𝐗 𝑡, 𝛂
Введем обозначение
𝛾
𝐗 ∗ 𝑠, 𝛼 𝐑 𝑠 𝑑𝑠
𝐑 𝑡 𝐗 ∗ 𝑡, 𝛼
𝑑𝑡
(П.10.3)
воспользуемся фильтрующим свойством дельта-функции и представим
(П.10.2) следующим образом:
1
𝛾𝐗 𝑡, 𝛼
4
𝑁
𝐑 𝑡
2
𝐗 𝑡, 𝛂
или в эквивалентной форме
𝐑 𝑡
1
𝛾𝐗 𝑡, 𝛼
4
2
𝐗 𝑡, 𝛼
𝑁
.
(П.10.4)
Подставляя (П. 10.4) в (П. 10.3), для параметра 𝛾 имеем
𝛾
2
𝑁
𝐗 𝑡, 𝛼 𝐗 ∗ 𝑡, 𝛼
𝑑𝑡
𝛾
1
2𝑁
𝐗 𝑡, 𝛼 𝐗 ∗ 𝑡, 𝛼
Э ,
𝐻
𝑑𝑡. (П.10.5)
Учитывая, что
1
2
𝐗 𝑡, 𝛼 𝐗 ∗ 𝑡, 𝛼
𝑑𝑡
Э
,
𝑁
а также (3.122), представим (П. 10.5) в виде
400
𝐻
Э
𝑁
𝛾 1
4 𝐻 𝐻 𝜌∗ 𝛂 𝛂 .
𝐻
(П.10.6)
Из (П. 10.6) следует
𝛾
4 𝐻 𝐻 𝜌∗ 𝛂 , 𝛂
.
1 𝐻
(П.10.7)
Подставляя (П. 10.7) в (П. 10.4), получим выражение для весового
вектора при оптимальном обнаружении-разрешении
𝐑 𝑡
2
𝐗 𝑡, 𝛂
𝑁
𝐻𝐻 ∗
𝜌 𝛂 , 𝛂 𝐗 𝑡, 𝛂
1 𝐻
.
(П.10.8)
Это соотношение используют для определения модуля комплексного
весового интеграла.
401
ПРИЛОЖЕНИЕ 11
Минимизация условной дисперсии оценки параметра сигнала
Для получения результата на основе критериев 6.45 напомним
некоторые сведения из математического анализа. Для произвольной
функции f(x) известны следующие правила дифференцирования
𝑑 ln 𝑓 𝑥
𝑓 𝑥
𝑑𝑥
𝑑𝑓 𝑥
𝑑𝑥
𝑑 ln 𝑓 𝑥
𝑑𝑥
𝑑 𝑓 𝑥
𝑑𝑥
Напомним
также
(П.11.1)
𝑑 ln 𝑓 𝑥
𝑑𝑥
формальную
𝑓 𝑥
запись
(П.11.2)
неравенства
Коши-
Буняковского
|𝑓 𝑥 | 𝑑𝑥 ∙
𝑓 𝑥 𝜑 𝑥 𝑑𝑥
|𝜑 𝑥 | 𝑑𝑥
(П.11.3)
Введем условие нормировки
𝑝 𝑦 𝑡 ⁄𝛼 𝑑𝑦
1,
(П.11.4)
которое показывает, что с единичной вероятностью в какой-либо из
принятых реализаций содержится сигнал с параметром 𝛼 .
Проведем ряд формальных преобразований.
Продифференцируем 6.45 по параметру 𝛼 , и с учетом правила П11.1
и условия нормировки П11.4 получим
𝛼у
𝛼
𝑑𝑝 𝑦 𝑡 ⁄𝛼
𝑑𝑦 𝑡
𝑑𝛼
𝛼у
𝛼
(П.11.5)
𝑑 ln 𝑝 𝑦 𝑡 ⁄𝛼
𝑑𝛼
∙ 𝑝 𝑦 𝑡 ⁄𝛼 𝑑𝑦 𝑡
1
К соотношению П11.5 применим неравенство Коши-Буняковского
П11.3,
𝜑 𝑥
в
котором
положим
𝑓 𝑥
𝛼
𝛼
𝑝 𝑦 𝑡 ⁄𝛼
и
𝑝 𝑦 𝑡 ⁄𝛼 𝑑 ln 𝑝 𝑦 𝑡 ⁄𝛼 /𝑑𝛼 . После подстановки в П11.3 этих
функций имеем
402
𝛼
𝑝 𝑦 𝑡 ⁄𝛼 𝑑𝑦 𝑡
𝛼
𝛼
𝑑 ln 𝑝 𝑦 𝑡 ⁄𝛼
𝑑𝛼
𝑝 𝑦 𝑡 ⁄𝛼 𝑑𝑦 𝑡
𝛼
𝑝 𝑦 𝑡 ⁄𝛼 𝑑𝑦 𝑡
𝑑 ln 𝑝 𝑦 𝑡 ⁄𝛼
𝑑𝛼
(П.11.6)
𝑑𝑦 𝑡
Проанализируем составляющие входящие в П11.6.
Первый интеграл в левой части является условной дисперсией
𝜎 𝛼 ⁄𝛼 , подлежащей минимизации.
Для упрощения второго интеграла в левой части П11.6 дважды
продифференцируем условие нормировки П11.4 и в результате получим
𝑑 ln 𝑝 𝑦 𝑡 ⁄𝛼
𝑑𝛼
𝑝 𝑦 𝑡 ⁄𝛼 𝑑𝑦 𝑡
𝑑 ln 𝑝 𝑦 𝑡 ⁄𝛼
𝑑𝛼
(П.11.7)
Таким образом, он равен значению второй производной от логарифма
функции правдоподобия по параметру 𝛼 .
В
результате
неравенство
П11.6
значительно
упрощается
и
принимает вид 𝛼 /𝛼
𝜎
𝛼
𝛼
𝑑 ln 𝑝 𝑦 𝑡 ⁄𝛼
𝑑𝛼
1
(П.11.8)
Выражение П11.8 можно использовать для определения условной
дисперсии оценки параметра 𝛼 по критериям 6.45
___________
403
РЕКОМЕНДОВАННАЯ ЛИТЕРАТУРА
П.А.,
Сосновский
С.А.
Радиолокационные
и
1. Бакулев
радионавигационные системы: Учебное пособие для вузов. – М.: Радио и
связь, 1994.
2. Ван Трис Г. Теория обнаружения, оценок и модуляции. т. 3. – М.:
Сов. радио, 1977.
3. Вовшин Б.М. Физические основы обнаружения и оптимальной
обработки радиолокационных сигналов на фоне помех. Часть I:
Одноканальное обнаружение сигналов на фоне некоррелированных
гауссовых помех. Учебное пособие. – М.: МИРЭА, 2010
4. Вовшин Б.М. Физические основы обнаружения и оптимальной
обработки радиолокационных сигналов на фоне помех. Часть II:
Многоканальное обнаружение сигналов на фоне некоррелированных
гауссовых помех. Специальные вопросы теории обнаружения. Учебное
пособие. – М.: МИРЭА, 2010
5. Информационные технологии в радиотехнических системах:
Учебное пособие / В.А. Васин, И.Б. Власов, Ю.М. Егоров, А.И. Николаев
и др.; Под ред. И.Б. Федорова – М.: Изд-во МГТУ им. Н.Э. Баумана, 2003.
6. Коростелев А.А. Пространственно-временная теория радиосистем:
Учебное пособие. – М.: Радио и связь, 1987.
7. Левин Б.Р. Теоретические основы статистической радиотехники. –
М.: Радио и связь, 1989.
8. Лезин Ю.С. Введение в теорию и технику радиотехнических систем:
Учебное пособие для вузов. – М.: Радио и связь, 1986.
9. Радиотехнические системы: Учебник для вузов по спецальности
«Радиотехника» / Ю.П. Гришин, В.П. Ипатов, Ю.М. Казаринов и др.; Под
ред. Ю.М. Казаринова. – М.: Высшая школа, 1990.
10. Радиоэлектронные системы. Основы построения и теория:
Справочник/ Я.Д. Ширман, С.Т. Багдасарян, А.С. Маляренко, Д.И.
Леховицкий, С.П. Лещенко, Ю.И. Лосев, А.И.Николаев, С.А. Горшков,
С.В. Москвитин, В.М. Орленко/ Под ред. Я.Д. Ширмана – М.:
Радиотехника, 2007.
11. Сколник М. Справочник по радиолокации в 4-х т. – М.: Радио и связь,
1976 – 1979.
Ю.Г.
Теоретические
основы
радиолокации
и
12. Сосулин
радионавигации: Учебное пособие для вузов. – М.: Радио и связь, 1992.
13. Теоретические основы радиолокации: Учебное пособие для вузов /
Я.Д. Ширман, В.Н. Голиков, И.Н. Бусыгин, Г.А. Костин, В.Н. Манжос,
Н.Н. Минервин, Б.В. Найденов, В.И. Поляков, А.С. Челпанов; Под ред.
Я.Д. Ширмана. – М.: Сов. радио, 1970.
14. Теоретические основы радиолокации: Учебное пособие для вузов /
А.А. Коростелев, Н.Ф. Клюев, Ю.А. Мельник, В.А. Губин и др.; Под ред.
В.Е. Дулевича. – М.: Сов. радио, 1978.
404
15. Теория обнаружения сигналов / П.С. Акимов, П.А. Бакут, В.А.
Богданович и др.; Под ред. П.А. Бакута.– М.: Радио и связь, 1984.
16. Тихонов В.И. Оптимальный прием сигналов. – М.: Радио и связь,
1983.
17. Тихонов В.И., Харисов В.Н. Статистический анализ и синтез
радиотехнических устройств и систем: Учебное пособие. – М.: Радио и
связь, 1991.
18. Фалькович С.Е., Хомяков Э.Н. Статистическая теория измерительных
радиосистем. – М.: Радио и связь, 1981.
19. Финкельштейн М.И. Основы радиолокации: Учебник. – М.: Радио и
связь, 1983.
20. Ширман Я.Д. Разрешение и сжатие сигналов. – М.: Сов. радио, 1974.
21. Ширман Я.Д., Манжос В.Н. Теория и техника обработки
радиолокационной информации на фоне помех. – М.: Радио и связь, 1981.
405