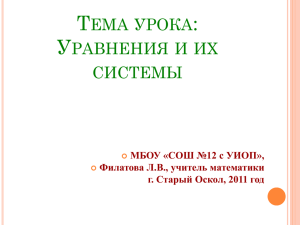
Федеральное агентство железнодорожного транспорта Иркутский государственный университет путей сообщения Н.В. Банина В.Е. Гозбенко СИСТЕМЫ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ И УСТОЙЧИВОСТЬ ИХ РЕШЕНИЙ Учебное пособие по дисциплине «Математика» для студентов всех специальностей Иркутск 2009 УДК 517.944:517.53 ББК 22.311: 22.161 Б23 Рецензенты: заведующая кафедрой «Дифференциальные и интегральные уравнения», кандидат физико-математических наук Е.А. Головко, ИМЭИ, ИГУ; доцент кафедры «Информационные системы», кандидат физикоматематических наук А.А. Косов, ИИТМ, ИрГУПС. Банина Н.В., Гозбенко В.Е. Б23 Системы дифференциальных уравнений и устойчивость их решений: Учебное пособие по дисциплине «Математика» для студентов всех специальностей / Н.В. Банина, В.Е. Гозбенко. – Иркутск: ИрГУПС, 2009. – 136 с. Ил. 25. Табл. 1. Библиогр.: 11 назв. В пособии рассматриваются понятия и методы теории систем обыкновенных дифференциальных уравнений. Особое внимание уделено основным свойствам и методам решения нормальных систем обыкновенных дифференциальных уравнений, а также вопросы, связанные с исследованием устойчивости решений этих систем. Наряду с теоретическими сведениями пособие содержит большое число различных примеров, а также упражнения для самостоятельной работы. Рекомендовано студентам всех специальностей. УДК 517.944:517.53 ББК 22.311: 22.161 Н.В. Банина, 2009 В.Е. Гозбенко, 2009 Иркутский государственный университет путей сообщения, 2009 ОГЛАВЛЕНИЕ ВВЕДЕНИЕ………………………………………………………………………..…………………...…………......5 ГЛАВА 1. НОРМАЛЬНЫЕ СИСТЕМЫ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ……………………………………………………………………………………6 §1.1. Система обыкновенных дифференциальных уравнений….…………..….6 §1.2. Задача Коши. Общее и частное решения, первый интеграл нормальной системы дифференциальных уравнений…………………...…...9 §1.3. Методы интегрирования нормальной системы дифференциальных уравнений…………………………………………………………....12 1.3.1. Метод исключения неизвестных…………………………………………….........12 1.3.2. Последовательное интегрирование………………………………………….......19 1.3.3. Метод интегрируемых комбинаций………………………………………….…23 §1.4. Задачи механики, приводящие к нормальной системе дифференциальных уравнений……………………………………………………………28 §1.5. Фазовое пространство………………………………………………………………………..….31 Упражнения……………………………………………………………………………………………………...36 ГЛАВА 2. ЛИНЕЙНЫЕ НОРМАЛЬНЫЕ СИСТЕМЫ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ С ПОСТОЯННЫМИ КОЭФФИЦИЕНТАМИ…………..……….....40 §2.1. Структура общего решения линейной нормальной системы дифференциальных уравнений с постоянными коэффициентами.................................................................................................................................40 §2.2. Методы решения линейной однородной системы с постоянными коэффициентами………………………………………………………...46 2.2.1. Метод Эйлера……………………………………………………………………………….....46 2.2.2. Матричный метод……………………………………………………………………...……60 §2.3. Методы решения линейной неоднородной системы дифференциальных уравнений c постоянными коэффициентами………………………………………………………………………………….…68 3 2.3.1. Метод вариации произвольных постоянных..……………………….…...68 2.3.2. Метод Даламбера………………………………………………………………………........72 2.3.3. Метод подбора………………………………………………………………………………...75 Упражнения…………………………………………………………………………………………………...…85 ГЛАВА 3. ЭЛЕМЕНТЫ ТЕОРИИ УСТОЙЧИВОСТИ……………………...........89 §3.1. Устойчивость по Ляпунову. Основные понятия и определения….....89 §3.2. Основные типы точек покоя линейных однородных систем дифференциальных уравнений и их устойчивость……………………….………....100 §3.3. Критерий Гурвица………………………………………………………..……………………....113 §3.4. Метод функций Ляпунова………………………………………………………………......118 §3.5. Устойчивость по первому приближению................……………………………...124 Упражнения……………………………………………………………………………………………………128 БИБЛИОГРАФИЯ………………………………………………………………………….………………131 ПРИЛОЖЕНИЕ……………………………………………………………………………………….……...132 4 ВВЕДЕНИЕ При изучении явлений природы и общества, решении многих задач физики, механики, техники, экономики и других наук не всегда удается непосредственно установить прямую зависимость между величинами, описывающими эволюционный процесс, протекающий в той или иной материальной системе. Однако в большинстве случаев можно установить связь между одними переменными величинами (функциями) и скоростями их изменения относительно другой (независимой) переменной величины, то есть найти уравнения, в которых неизвестные функции входят под знак производной. Эти уравнения называются обыкновенными дифференциальными уравнениями. Дифференциальные уравнения моделируют процесс в том смысле, что они описывают эволюцию процесса, характер происходящих с материальной системой изменений, возможные варианты этих изменений в зависимости от первоначального состояния системы. Опыт показывает, что решение различных задач приводит, как правило, к нескольким дифференциальным уравнениям. Поэтому необходимо выработать приемы решения систем дифференциальных уравнений. Этим вопросам посвящен раздел математики – теория обыкновенных дифференциальных уравнений. Если задача математического моделирования сводится к системе обыкновенных дифференциальных уравнений, методы решения которой известны, то найденное с помощью этих методов решение системы дифференциальных уравнений полностью описывает искомую функциональную характеристику изучаемого процесса. Однако, при решении задач физики, механики и техники часто бывает важно знать не конкретное значение решения системы дифференциальных уравнений при данном конкретном значении его аргумента (независимой переменной), а характер поведения решения с ростом значений аргумента. В частности, бывает важно знать, является ли решение периодическим или асимптотически приближается к какой-либо известной функции. В этом случае особое значение приобретают методы качественной теории дифференциальных уравнений, которые позволяют исследовать характер поведения фазовых траекторий системы дифференциальных уравнений вблизи положения равновесия, а также устойчивость положения равновесия. 5 ГЛАВА 1. НОРМАЛЬНЫЕ СИСТЕМЫ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ §1.1. Система обыкновенных дифференциальных уравнений Системой обыкновенных дифференциальных уравнений называется совокупность n уравнений, связывающих независимую переменную t , n искомых функций x1 , x2 , ..., xn , зависящих от аргумента t , и их производные соответственно до порядков p1 , p 2 , ..., p n включительно: F1 t , x1 , x1 , ..., x1 p1 , x2 , x2 , ..., x2 p2 , ..., xn , xn , ..., x n pn 0, p p p F2 t , x1 , x1 , ..., x1 1 , x2 , x2 , ..., x2 2 , ..., xn , xn , ..., xn n 0, ... ... ... ... ... ... ... ... ... ... ... ... ... ... F t , x , x , ..., x p1 , x , x , ..., x p2 , ..., x , x , ..., x pn 0. n 1 1 1 2 2 2 n n n (1.1) Порядком системы (1.1) называется число p , равное сумме порядков старших производных искомых функций x1 p1 , x2 p2 , ..., xn pn , входящих в уравнения системы: p p1 p 2 ... p n . Система дифференциальных уравнений (1.1) называется линейной, если все уравнения, входящие в систему (1.1), являются линейными относительно искомых функций и их производных. Если хотя бы одно уравнение, входящее в систему (1.1), является нелинейным, то система (1.1) называется нелинейной. Пусть система дифференциальных уравнений (1.1) разрешима относительно старших производных искомых функций x1 p1 , x2 p2 , ..., xn pn . При выполнении данного допущения разрешенная система (1.1) примет вид: 6 x1 p1 p x2 2 ... ... x pn n f t , x , x , ..., x , f1 t , x1 , x1 , ..., x1 p1 1 , x2 , x2 , ..., x2 p2 1 , ..., xn , xn , ..., x n pn 1 , 2 1 1 1 p1 1 , x 2 , x2 , ..., x2 p2 1 , ..., xn , xn , ..., xn pn 1 ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... (1.2) f 2 t , x1 , x1 , ..., x1 p1 1 , x2 , x2 , ..., x 2 p2 1 , ..., xn , xn , ..., xn pn 1 . Система дифференциальных уравнений вида (1.2) называется канонической системой дифференциальных уравнений. Если p1 p 2 ... p n 1 , то система (1.2) будет представлять собой систему дифференциальных уравнений первого порядка dx1 dt f1 t , x1 , x2 , ..., xn , dx2 f t , x , x , ..., x , 2 1 2 n dt ... ... ... ... ... ... ... dxn f t , x , x , ..., x . n 1 2 n dt (1.3) Система вида (1.3) называется нормальной системой дифференциальных уравнений, порядок такой системы равен n . Всякую каноническую систему дифференциальных уравнений порядка p путем введения новых переменных можно привести к эквивалентной нормальной системе дифференциальных уравнений, имеющей такой же порядок p . Действительно, полагая в канонической системе (1.2) x1 x11 , x1 x12 , ..., x1 p1 1 x1, p1 1 , x2 x21 , x2 x22 , ..., x2 p2 1 x2, p2 1 , xn x n1 , x n xn 2 , ..., x n pn 1 xn , pn 1 , где xij xij t , i 1, n, j 1, pn 1 – новые неизвестные функции, приходим к эквивалентной системе дифференциальных уравнений в нормальной форме, имеющей тот же самый порядок, что и каноническая система: 7 dx1 dt x11 , dx11 x , 12 dt dx1, p1 2 x1, p1 1 , dt dx1, p1 1 f1 t , x1 , x11 , ..., x1, p1 1 , x2 , x 21 , ..., x 2, p2 1 , ..., xn , xn1 , ..., x n, pn 1 , dt dx2 dt x21 , dx21 x , 22 dt dx 2, p2 2 x2, p 1 , 2 dt dx 2, p2 1 f 2 t , x1 , x11 , ..., x1, p 1 , x2 , x21 , ..., x2, p 1 , ..., xn , xn1 , ..., xn, p 1 , 1 2 n dt dxn dt xn1 , dxn1 x , n2 dt dxn , pn 2 x1, pn 1 , dt dxn , pn 1 f1 t , x1 , x11 , ..., x1, p1 1 , x2 , x21 , ..., x2, p2 1 , ..., xn , xn1 , ..., xn , pn 1 . dt (1.4) Аналогично, одно дифференциальное уравнение n -го порядка, разрешенное относительно старшей производной x n f t , x, x , ..., x n1 8 введением новых функций x1 x, x2 x , ..., xn1 x n 1 , может быть приведено к нормальной системе дифференциальных уравнений, порядок которой равен n : dx dt x1 , dx1 x , 2 (1.5) dt ... ... dxn1 f t , x, x , x , ..., x . 1 2 n 1 dt Заметим, что обратный переход от нормальной системы, состоящей из n дифференциальных уравнений, к одному дифференциальному уравнению n -го порядка не всегда возможен. Далее (в пункте 1.3.1), будут указаны условия, когда этот переход возможно осуществить. Переход к рассмотрению систем дифференциальных уравнений, записанных в нормальной форме, обусловлен двумя аспектами. Во-первых, теория и методы решения нормальных систем дифференциальных уравнений разработаны наиболее полно по сравнению с каноническими системами. Во-вторых, переход от канонической системы дифференциальных уравнений, в частности, одного дифференциального уравнения n -го порядка, к нормальной системе имеет важное значение для проведения качественного анализа математических моделей прикладных задач. §1.2. Задача Коши. Общее и частное решения, первый интеграл нормальной системы дифференциальных уравнений Решением нормальной системы n дифференциальных уравнений (1.3) называется совокупность n функций x1 x1 t , x2 x2 t , ..., x n xn t , 9 (1.6) определенных и непрерывно дифференцируемых в интервале (a, b) , если при подстановке их в уравнения системы (1.3) получаются тождества, справедливые для всех t (a, b) . Процесс отыскания решения системы дифференциальных уравнений называется интегрированием системы дифференциальных уравнений. Задача отыскания решения нормальной системы дифференциальных уравнений (1.3), удовлетворяющего начальным условиям x1 t 0 x10 , x 2 t 0 x 20 , …, x n t 0 x n0 , (1.7) называется задачей Коши. При этом числа t0 , x10 , x20 , ..., xn0 называются начальными данными. Теорема 1.1 (существования и единственности решения задачи Коши для нормальной системы). Пусть в нормальной системе дифференциальных уравнений (1.3) а) функции fi(t, x1, x2, …, xn), i 1, n , определены в некоторой n+1 мерной области D изменения переменных t, x1, x2, …, xn; б) существует окрестность точки (t0, x10 , x20 , ..., xn0 ) D , в которой функции fi, i 1, n , непрерывны и имеют непрерывные частные производные f i f i f , , ..., i , i 1, n , x1 x2 xn тогда найдется интервал t 0 h t t 0 h, h 0 , в котором существует единственное решение нормальной системы, удовлетворяющее начальным условиям (1.7). Совокупность n функций xi=xi(t, С1, С2, …, Сn), i 1, n , (1.8) зависящих от n произвольных постоянных C1 , C 2 ,..., Cn , называется общим решением нормальной системы (1.3), если в некоторой области D существования и единственности решения задачи Коши выполняются следующие условия: 1) при любых значениях С1, С2, …, Сn совокупность функций (1.8) является решением нормальной системы (1.3); 10 2) при любых заданных начальных условиях (1.10) найдутся такие значения произвольных постоянных C1 C10 , C2 C 20 , ..., C n C n0 , что совокупность функций xi xi t , C10 , C20 , ..., C n0 , i 1, n , (1.9) является решением нормальной системы (1.3), удовлетворяющим начальным условиям (1.7). Для нахождения значений произвольных постоянных, подставим начальные данные t0, x10 , x20 , ..., xn0 в равенства (1.8), в результате получим систему уравнений x1 t 0 , C1 , C 2 , ..., Cn x10 , 0 x2 t 0 , C1 , C 2 , ..., Cn x2 , x t , C , C , ..., C x 0 . n 0 1 2 n n Из этой системы однозначно определим значения неизвестных постоянных C1 C10 , C2 C 20 , ..., C n C n0 . Решение (1.9), получающееся из общего при конкретных значениях постоянных, называется частным решением нормальной системы. Частное решение является решением задачи Коши. График решения нормальной системы (1.3), представляющий собой интегральную кривую в n 1 -мерном пространстве переменных t , x1 , x2 , ..., xn , называется интегральной кривой нормальной системы. При выполнении условий теоремы существования и единственности задачи Коши через каждую точку (t0, x10 , x20 , ..., xn0 ) n 1 -мерной области D определения правых частей нормальной системы (1.3) проходит единственная интегральная кривая. Выбирая в области D различным образом точки (t0, x10 , x20 , ..., xn0 ), получим бесчисленное множество интегральных кривых. Таким образом, общее решение (1.8) нормальной системы (1.3) определяет в n 1 -мерном пространстве семейство интегральных кривых, а 11 частному решению (1.9) будет соответствовать одна интегральная кривая, проходящая через заданную точку (t0, x10 , x20 , ..., xn0 ). Пусть функция Фt , x1 , x 2 , ..., xn определена и непрерывна вместе с своими частными производными D мерной области Ф Ф Ф , , …, в некоторой (n+1)t x1 xn изменения переменных t , x1 , x2 ,..., xn . Функция Фt , x1 , x 2 , ..., xn называется интегралом нормальной системы (1.3), если функция Фt , x1 , x 2 , ..., xn при подстановке в неё произвольного решения системы принимает постоянное значение при всех t (a, b) : Фt , x1 , x 2 , ..., xn C , (1.10) где С – произвольная постоянная. При этом равенство (1.10) называется первым интегралом нормальной системы (1.3). §1.3. Методы интегрирования нормальной системы дифференциальных уравнений 1.3.1. Метод исключения неизвестных Метод исключения неизвестных заключается в приведении нормальной системы, состоящей из n уравнений, к одному уравнению n -го порядка от одной неизвестной функции. Сведение нормальной системы к одному уравнению достигается путем дифференцирования одного из уравнений системы и исключением всех неизвестных функций, кроме одной. Продифференцируем первое из уравнений нормальной системы (1.3) по t: d 2 x1 dt 2 Учитывая, что f1 f1 dx1 f1 dx2 f dx ... 1 n . t x1 dt x2 dt xn dt dxi f i t , x1 , x2 , ..., xn , i 1, n , получаем уравнение dt d 2 x1 f1 f1 f1 f1 f f ... fn . 1 2 t x1 x2 x n dt 2 12 Полагая, что F2 (t , x1 , x2 ,..., xn ) f1 f1 f f f1 1 f 2 ... 1 f n , приходим к t x1 x2 x n уравнению d 2 x1 dt 2 F2 t , x1 , x2 , ..., xn . (1.11) Повторим указанные действия: продифференцируем уравнение (1.11) dxi по t и заменим в получаемом уравнении производные функциями dt f i t , x1 , x2 , ..., xn . В результате имеем уравнение d 3 x1 F2 F2 F2 F2 f f ... fn . 1 2 t x1 x2 x n dt 3 Вводя в рассмотрение функцию F3 t , x1 , x2 , ..., xn F2 F2 F F f1 2 f 2 ... 2 f n , t x1 x 2 xn перепишем последнее уравнение в виде: d 3 x1 F3 t , x1 , x2 , ..., xn . dt 3 (1.12) Продолжая этот процесс, получим уравнения d 4 x1 F4 t , x1 , x2 , ..., xn , dt 4 ....................................... d n1 x1 Fn1 t , x1 , x2 , ..., xn , dt n1 d n x1 Fn t , x1 , x2 , ..., xn . dt n Предположим, что функции (1.13) f1 , F2 ,..., Fn 1 , зависящие от переменных x2 , x3 ,..., xn , являются независимыми в некоторой области их существования, 13 то есть любая из функций f1 , F2 ,..., Fn 1 не может быть представлена как функция от остальных функций. Для того чтобы функции f1 , F2 ,..., Fn 1 были независимыми в области их существования, необходимо и достаточно, чтобы D ( f1 , F2 ,..., Fn1 ) якобиан этих функций, обозначаемый и определяемый по D ( x2 , x3 ,..., xn ) формуле f1 f1 x2 x3 F2 F2 D ( f1 , F2 ,..., Fn1 ) x 2 x3 D ( x2 , x3 ,..., xn ) Fn1 Fn1 x2 x3 f1 xn F2 x n , Fn1 xn был отличен от нуля при всех рассматриваемых значениях функций х2, х3, ..., хn: D ( f1 , F2 ,..., Fn1 ) 0. D ( x2 , x3 ,..., x n ) (1.14) При сделанном предположении система уравнений, составленная из первого уравнения нормальной системы и уравнений (1.11), (1.12) и (1.13) dx1 dt f1 t , x1 , x2 , ..., xn , 2 d x1 2 F2 t , x1 , x2 , ..., xn , dt n1 d x1 dt n1 Fn1 t , x1 , x2 , ..., xn (1.15) разрешима относительно неизвестных функций х2, х 3 , ..., х п . Решив систему (1.15), найдем выражения функций х2, х 3 , ..., х п через dx1 d n 1 x1 t , x1 , , ..., . Подставляя эти выражения в уравнение dt dt n1 14 d n x1 dt n Fn t , x1 , x2 , ..., xn , получим уравнение n-го порядка с одной неизвестной функцией x1: d n x1 ~ dx1 d n 1 x1 . F t , x , , ..., n 1 1 dt dt n dt (1.16) Пусть x1 x1 t , C1 , C 2 , ..., C n есть общее решение уравнения (1.16). Дифференцируя это решение n 1 раз по переменной t, находим произ- dx1 d n 1 x1 водные ,..., n 1 как известные функции от t , C1 , C 2 , ..., C n и подставdt dt ляем их в систему уравнений (1.15). В силу предположения (1.14) система (1.15) будет разрешима и ее общим решением будет являться система функций: x2 x2 t , C1 , C 2 , ..., C n , x3 x3 t , C1 , C2 , ..., Cn , ... ... ... ... ... ... xn xn t , C1 , C2 , ..., Cn . Добавив к полученным функциям решение x1 x1 t , C1 , C 2 , ..., C n уравнения (1.16) получим общее решение нормальной системы дифференциальных уравнений (1.3): x1 x1 t , C1 , C 2 , ..., C n , x2 x2 t , C1 , C 2 , ..., C n , ... ... ... ... ... ... (1.17) xn xn t , C1 , C2 , ..., Cn . Замечание. Если условие (1.14) не выполняется, то система (1.15) не разрешима и функции х2, х 3 , ..., х п нельзя выразить через dx1 d n1 x1 t , x1 , , ..., n1 . В этом случае нормальная система дифференциальdt dt 15 ных уравнений (1.3) не может быть сведена к одному уравнению от одной искомой функции. Пример 1.1. Для системы дифференциальных уравнений dx dt 3 x 2 y, dy 2 x y 2e t dt найти общее решение методом исключения и определить частное решение, удовлетворяющее начальным условиям: x0 1 , y 0 2 . Решение. Продифференцировав первое уравнение заданной системы по переменной t , получим уравнение d 2x dx dy 3 2 . 2 dt dt dt Учитывая, что dx dy 3x 2 y и 2 x y 2e t , имеем dt dt d 2x 33 x 2 y 2 2 x y 2e t . 2 dt Раскрывая скобки и приводя подобные слагаемые, приходим к уравнению d 2x 5 x 4 y 4e t . 2 dt (1.18) Из первого уравнения выразим искомую функцию y : 1 dx y 3x . 2 dt (1.19) Заменив в уравнении (1.18) функцию y ее выражением (1.19), получим 16 d 2x dx d 2x 1 dx t 5 x 4 3 x 4 e x 2 4e t 2 2 dt 2 dt dt dt d 2x dx 2 x 4e t . 2 dt dt (1.20) Таким образом, решение заданной системы, состоящей из двух дифференциальных уравнений 1-го порядка, приводится к решению одного дифференциального уравнения (1.20) второго порядка. Уравнение (1.20) является линейным однородным дифференциальным уравнением с постоянными коэффициентами, зависящим от одной искомой функции x . Найдем общее решение этого уравнения известным в теории дифференциальных уравнений методом. Общее решение уравнения (1.20) имеет вид xt x * t ~ x t , где ~ x t – некоторое частное решение этого уравнения, а x * t – общее решение соответствующего однородного уравнения d 2x dx 2 x 0. dt dt 2 (1.21) Составим характеристическое уравнение однородного дифференциального уравнения (1.21) 2 2 1 0 и найдем его решения 1 2 1 . Общее решение x * t уравнения (1.21) будет иметь вид: x * t C1e t C 2 te t . Если правая часть линейного неоднородного уравнения с постоянными коэффициентами имеет вид f t Pm t e at cos bt Ql t e at sin bt , а 17 a bi является корнем характеристического уравнения кратности k , то частное решение линейного неоднородного уравнения с постоянными ко~ ~ эффициентами ищется в виде ~ x (t ) t k ( P t e at cos bt Q t e at sin bt ) , p p p max( m, l ) . f (t ) 4e t , то a 1, b 0 Так как для уравнения (1.20) и p m l 0 . Кроме того, a bi 1 0 i 1 не является корнем характеристического уравнения, поэтому k 0 . Следовательно, частное решение уравнения (1.20) следует искать в виде ~ x t Ae t . d~ x ~ Подставим x t в уравнение (1.20), учитывая, что Ae t и dt d~ x2 Ae t : 2 dt Ae t 2 Ae t Ae t 4e t . Разделив обе части полученного равенства на e t ( e t 0, t R ), находим: A 2 A A 4 4 A 4 A 1. Значит, частное решение неоднородного уравнения (1.20) имеет вид: ~ x (t ) e t . Таким образом, определяем общее решение уравнения (1.20) – искомую функцию x(t ) : xt C1e t C2 te t e t . (1.22) Теперь можно найти искомую функцию y (t ) . Для этого продифференцируем найденную функцию x(t ) : dx C1e t C 2 e t C2 te t e t , dt и подставим xt и dx в равенство (1.19): dt 18 y t 3 1 C1e t C 2te t e t C1e t C 2 e t C 2te t e t . 2 2 Приводя подобные слагаемые, определяем искомую функцию y (t ) : 1 y t C1e t C 2 e t C2 te t 2e t . 2 (1.23) Используя заданные начальные данные t 0 , x0 1 , y 0 2 в выражениях (1.22) и (1.23), получим систему для определения постоянных C1 и C2 : 1 C1 1, 1 2 C C 2 2. 1 2 Решая эту систему, находим C1 2 и C2 2C1 4 . Таким образом, решение поставленной задачи Коши имеет вид: xt 2e t 4te t e t , y t 4te t 2e t . 1.3.2. Последовательное интегрирование В данном параграфе рассмотрим частные случаи нормальных систем дифференциальных (1.3), решение которых может быть найдено последовательным интегрированием уравнений, входящих в состав этих систем. 1. Пусть нормальная система состоит из n дифференциальных уравнений, каждое из которых содержит только одну неизвестную функцию dx1 dt f1 t , x1 , dx2 f t , x , 2 2 dt dxn f t , x . n n dt 19 (1.24) Тогда интегрируя отдельно каждое уравнение системы (1.24) находим искомые функции xi xi t , Ci , i 1, n . 2. Пусть нормальная система дифференциальных уравнений имеет вид: dx1 dt f1 t , x1 , dx2 f t , x , x , 2 1 2 dt dxn f t , x , x , ..., x . n 1 2 n dt (1.25) Тогда интегрируя первое уравнение системы, находим искомую функцию x1 x1 t , C1 . Подставив найденную функцию во второе уравнение системы и проинтегрировав его, получим функцию x2 x2 t , C1 , C 2 и т.д. Таким образом, выполняя последовательно указанные действия, приходим к общему решению системы (1.25): x1 x1 t , C1 , x2 x2 t , C1 , C 2 , xn xn t , C1 , C2 , ..., C n . Пример 1.2. Найти решение следующих систем дифференциальных уравнений: dx dt 2 x t 1, а) dy 2 y, dt dx dt 2 x y , б) dy 2 y. dt Решение. а) Заданная система дифференциальных уравнений является системой вида (1.24), поэтому интегрируем её уравнения независимо друг от друга. 20 dx 2 x t 1 является линейным неоднородным dt дифференциальным уравнением первого порядка. Из теории дифференциальных уравнений известно, что решение линейного дифференциального уравнения первого порядка Первое уравнение dz p t z g t , dt где pt и g t – некоторые заданные функции, а z z t – неизвестная функция, может быть найдено по формуле z t e p t dt g t e p t dt dt C . (1.26) Учитывая, что для первого уравнения p t 2 , g t t 1 , определяем его решение согласно формуле (1.26): xt e 2 dt t 1e 2 dt dt C1 e 2t t 1e 2t dt C1 u t 1; du dt 1 2t 2t dv e dt ; v e 2 1 1 e 2t t 1e 2t e 2t dt C1 2 2 1 1 e 2t t 1e 2t e 2t C1 4 2 1 1 t 3 t 1 C1e 2t C1e 2t . 2 4 2 4 Второе уравнение заданной системы, является уравнением с разделяющимися переменными. Разделяя в нем переменные t и x dy 2dt , y интегрируя полученное уравнение 21 ln y 2t C 2 , находим ~ ~ y e 2t C2 y C 2 e 2t , C 2 e C2 . Таким образом, получаем общее решение заданной системы: xt C1e 2t t 3 ~ , y t C 2 e 2t . 2 4 б) Второе уравнение заданной системы зависит от одной неизвестной функции y и может быть проинтегрировано независимо от первого уравнения этой системы. Разделяя во втором уравнении переменные t и x dy 2dt , y интегрируя полученное уравнение ln y 2t C1 , находим искомую функцию y : ~ ~ y e 2t C1 y C1e 2t , C1 e C1 . Теперь можно проинтегрировать первое уравнение системы. Подставляя в него найденную функцию y , получим уравнение: dx 2 x C1e 2t . dt Из формулы (1.26) следует, что xt e 2 dt C1e 2t e 2 dt dt C 2 e 2t C1e 2t e 2t dt C 2 e 2t C1t C 2 . Значит, общее решение заданной системы имеет вид xt e 2t C1t C 2 , y t C1e 2t . 22 1.3.3. Метод интегрируемых комбинаций В некоторых случаях нормальная система дифференциальных уравнений (1.3) может быть решена методом интегрируемых комбинаций. Это возможно, когда из нормальной системы дифференциальных уравнений удается выделить интегрируемую комбинацию, то есть при помощи арифметических действий над уравнениями системы получить такое дифференциальное уравнение, которое легко можно было бы проинтегрировать и получить первый интеграл системы. Одна интегрируемая комбинация дает возможность получить один первый интеграл нормальной системы Ф1 t , x1 , x2 , ..., xn С1 , Пусть найдено n первых интегралов системы Фi t , x1 , x2 , ..., xn Сi , i 1, n и они независимые, то есть якобиан системы функций Фi t , x1 , x2 , ..., xn , i 1, n , отличен от нуля Ф1 x1 Ф2 D (Ф1 , Ф2 ,...,Фn ) x1 D ( x1 , x 2 ,..., xn ) Фn x1 Ф1 x2 Ф2 x 2 Фn x2 Ф1 xn Ф2 xn 0 . Фn x n Тогда задача интегрирования системы решена, так как из системы Ф1 t , x1 , x2 , ..., xn С1 , Ф t , x , x , ..., x С , 2 1 2 n 2 Фn t , x1 , x2 , ..., xn С n могут быть определены все искомые функции xi xi t , C1 , C 2 , ..., C n , i 1, n . Если найдено m , m n независимых первых интегралов, то система (1.3) сводится к системе с меньшим числом неизвестных. Построение интегрируемых комбинаций значительно упрощает решение системы дифференциальных уравнений, но, однако, конкретных способов, указывающих каким образом при помощи арифметических операций, производимых над уравнениями системы, может быть получена ин- 23 тегрируемая комбинация, не существует. Кроме того, не из всякой системы могут быть выделены интегрируемые комбинации. Эти недостатки метода интегрируемых комбинаций существенно ограничивают его применение. Рассмотрим на примерах некоторые подходы к нахождению интегрируемых комбинаций. Пример. 1.3. Найти решение системы дифференциальных уравнений методом интегрируемых комбинаций: dx dt y 1, dy x 1. dt (1.27) Решение. Складывая почленно данные уравнения, находим одну интегрируемую комбинацию – дифференциальное уравнение первого порядка с разделяющимися переменными и искомой функцией x y : d x y x y. dt Разделив переменные t и x y , приходим к уравнению: d x y dt . x y Интегрируя это уравнение, имеем ln x y ln C1 t x y et . C1 Из последнего равенства находим один из первых интегралов системы (1.27): e t x y C1 . Вычитая почленно из первого уравнения системы второе, получаем вторую интегрируемую комбинацию – дифференциальное уравнение первого порядка с разделяющимися переменными и искомой функцией x y : d x y y x 2. dt 24 Разделив переменные t и x y : d x y dt , x y 2 интегрируем полученное уравнение: x y2 e t . C2 ln x y 2 ln C 2 e t Равенство e t x y 2 C 2 определяет еще один первый интеграл системы (1.27). Проверим, что якобиан системы функций Ф1 t , x, y e t x y и Ф2 t , x, y e t x y 2 отличен от нуля: J Ф1 , Ф2 e t e t et et 1 1 2 0 . Следовательно, первые интегралы системы (1.27) независимы между собой и их совокупность неявно определяет общее решение данной системы e t x y C1 , t e x y 2 C 2 . (1.28) От системы (1.28) переходим к системе уравнений x y C1e t , x y C 2 e t 2, из которой определяем общее решение заданной системы xt 1 1 C1e t C2 e t 1 , y t C1e t C2 e t 1 . 2 2 Пример 1.4. Найти решение системы дифференциальных уравнений методом интегрируемых комбинаций: 1 dx 1 , dt y dy 1 , dt x t x0 1 , y 0 1 . 25 Решение. Преобразуем уравнения системы: dx y dt 1 1, x t dy 1, dt dx dt y dt dt 1, dy x t 1, dt d x t y dt 1, x t dy 1. dt (1.29) Складывая почленно уравнения системы (1.29), находим интегрируемую комбинацию y d x t dy x t 0 dt dt или d x t y 0 . dt Интегрируя обе части полученного уравнения, определяем первый интеграл заданной системы x t y C1 . (1.30) C1 . Подставив найденное выражеy ние для функции x t во второе уравнение системы (1.29) Из равенства (1.30) следует, что x t C1 dy 1 y dt и выполнив простейшие преобразования, получим уравнение dy dt , C1 0 . y C1 26 Интегрируя это уравнение ln y t C2 , C1 находим искомую функцию у: t ~ y C 2 e C1 , ~ где C2 eC2 . (1.31) Заменяя в равенстве (1.30) функцию y на ее выражение t x t C~2e C1 C1 , определяем искомую функцию x : t t C1 C1 ~ C1 C1 x t ~ e , C2 0 x ~ e t. C2 C2 Таким образом, общее решение заданной системы имеет вид: t t C ~ xt ~1 e C1 t , y t C 2 e C1 . C2 (1.32) Подставляя в равенства (1.32) начальные данные t 0 , x0 1 , ~ ~ y 0 1 , приходим к системе для определения C1 и C2 ( C1 0 , C2 0 ) : C1 1 C~ , 2 ~ 1 C . 2 ~ ~ Решая эту систему, находим C2 1 и C1 C 2 1 . ~ Заменив в выражениях искомых функций (1.32) C1 и C2 их найденными значениями, получим решение задачи Коши: xt e t t , y t e t . 27 §1.4. Задачи механики, приводящие к нормальной системе дифференциальных уравнений К нормальным системам дифференциальных уравнений приводят решения многих задач механики методами математического моделирования. Рассмотрим одну из них – движение материальной точки в пространстве R 3 . В теоретической механике математической моделью прямолинейного движения материальной точки в пространстве R 3 является уравнение движения, следующее из второго закона Ньютона d 2 r dr m 2 F t, r , . dt dt (1.33) В этом уравнении m – масса материальной точки, r t xt , y t , z t – радиус-вектор материальной точки, координаты которого определяют ко dr 3 ординаты точки в пространстве R , F t , r , – главный вектор (геометdt рическая сумма) сил, действующих на материальную точку. Векторное уравнение (1.33) в развернутом виде представляет собой систему из трех дифференциальных уравнений второго порядка d 2x dx dy dz m 2 X t , x, y, z, , , , dt dt dt dt d 2 y dx dy dz m 2 Y t , x, y, z, , , , dt dt dt dt d 2z dx dy dz m 2 Z t , x, y, z, , , . dt dt dt dt (1.34) Правые части этих уравнений в данный момент времени t задают коорди наты главного вектора сил F . Если считать неизвестными не только координаты материальной точdx dy dz ки x, y и z , но и проекции скорости ее движения , и на коордиdt dt dt dx dy dz натные оси, то, введя новые функции u , v и w , и разделив dt dt dt 28 обе части уравнений (1.34) на m m 0 , приходим к нормальной системе дифференциальных уравнений dx dt u, dy v, dt dz w, dt du 1 X t , x, y, z, u , v, w, dt m dv 1 Y t , x, y, z, u, v, w, dt m dw 1 Z t , x, y, z, u, v, w. dt m Пример 1.5. Груз массой m подвешен на вертикальной пружине, длина которой в ненагруженном состоянии равна l. Найти уравнение движения груза, пренебрегая массой пружины. Рис. 1.1. Решение. Груз будет двигаться прямолинейно. Примем за ось Oy ось, проходящую через точку подвеса груза, направленную вертикально вверх, а за начало координат – точку О положения равновесия груза, т.е. такую точку, в которой вес груза уравновешивается силой упругости пружины F1 (рис. 1.1). Обозначим через y отклонение груза от положения равновесия в момент времени t . Если есть удлинение пружины в момент времени t, а ст – статическое удлинение пружины, то есть расстояние от конца нерастянутой пружины до положения равновесия, тогда ст y или ст y . Уравнение движения с учетом введенных обозначений примет вид: d2y m 2 Fy , dt 29 где Fy – проекция на ось Oy действующей на груз силы F . Действующая на груз сила F слагается из силы упругости пружины F1 и силы тяжести F2 . Сила упругости пружины F1 направлена вертикально вверх и по зако ну Гука она пропорциональна удлинению пружины, то есть, проекция F1 на ось Oy определяется как F1 y c , где c - постоянный коэффициент жесткости пружины. Так как в положении равновесия сила упругости пружины F1 уравновешивается весом, то сила тяжести F2 действует в отрицательном направлении оси Oy и ее проекция на ось Oy определяется как F2 y c ст . Таким образом, имеем d2y m 2 F1 y F2 y , dt d2y m 2 c с ст , dt m d2y c ст . dt 2 Учитывая, что ст y , приходим к дифференциальному уравнению d2y m 2 cy . dt Обозначив c k 2 , окончательно получаем уравнение движения груза: m d2y k 2 y 0. 2 dt (1.35) Если ввести новую функцию v dy , dt то от уравнения (1.35) можно перейти к эквивалентной системе дифференциальных уравнений в нормальной форме 30 dy dt v, dv k 2 y, dt порядок которой равен двум. Пусть сила сопротивления пропорциональна скорости движения груdy за, то есть равна и направлена по вертикали вниз. Если при этом доdt пущении учитывать сопротивление среды (воздуха), в которой происходят колебания груза, то уравнение движения груза примет вид m d2y dy cy , dt dt 2 или d2y dy 2n k 2 y 0 , 2 dt dt . 2m Данному уравнению будет эквивалентна следующая нормальная система дифференциальных уравнений где n dy dt v, dv k 2 2nv. dt §1.5. Фазовое пространство Как видно из примера 1.5, приведенного в предыдущем параграфе, движение простейшей механической системы может описываться нормальной системой дифференциальных уравнений 31 dx1 dt X 1 t , x1 , x2 , ..., xn , dx2 X t , x , x , ..., x , 2 1 2 n dt ... ... ... ... ... ... dxn X t , x , x , ..., x , n 1 2 n dt (1.36) где переменная t обозначает время, искомые функции x1 (t ), x2 (t ),..., xn (t ) характеризуют состояние механической системы в моменты времени t , а функции X i (t , x1 , x2 ,..., x n ) , i 1, n , в моменты времени t определяют координаты главного вектора сил, действующих на механическую систему. Всякое решение системы (1.36) x1 x1 t , x2 x2 t , …, xn xn t описывает изменение состояния системы с течением времени t и называется движением. С геометрической точки зрения каждому состоянию механической системы в момент времени t соответствует точка x1 , x2 , ..., xn n -мерного пространства. Эту точку называют фазовой точкой, а само n -мерное пространство – фазовым пространством. При этом движение системы (1.36) может интерпретироваться как движение фазовой точки x1 , x2 , ..., xn по кривой фазового пространства, называемой фазовой траекторией. Направление движения фазовой точки по фазовой траектории с ростом времени t принято указывать стрелкой. Фазовая траектория является проекцией интегральной кривой решения системы (1.36) на фазовое пространство. Для случая n 2 интегральная кривая, проходящая через точку t0 , x10 , x20 и ее проекция на фазовую плоскость Ox1 x2 , проходящая через точку x10 , x20 , приведены на рис. 1.2. Отметим, что интегральная кривая, проходящая через точку t0 , x10 , x20 при одних и тех же значениях x10 и x20 и различных значениях t 0 , проектируется в одну и ту же фазовую траекторию, проходящую через точку с координатами ( x10 , x20 ) фазовой плоскости Ox1 x2 (рис. 1.2). Если система (1.36) имеет решение вида x1 t a1 , x2 t a 2 , …, xn t a n , 32 где a1 , a 2 , ..., a n – постоянные величины, то фазовая траектория, определяемая этим решением, будет представлять собой точку фазового пространства a1 , a 2 , ... ..., a n , которая называется точкой покоя, или положением равновесия этой системы. Задача Коши для системы (1.36) может быть сформулирована следующим образом: найти такое движение системы x1 x1 t , x2 x2 t , …, xn xn t , при котором фазовая точка x1 , x2 , ..., xn в заданный момент времени t 0 будет находиться в по- ложении x10 , x20 , ..., xn0 . Рис. 1.2 Пример 1.6. Найти фазовую траекторию системы дифференциальных уравнений dx dt y, dy x, dt проходящую через заданную точку M 0 x0 , y0 в момент времени t 0 0 . Решение. Найдем общее решение заданной системы методом исключения. Продифференцировав первое уравнение системы, имеем: d 2 x dy dt 2 dt и учитывая, что dy x , получим dt 33 d 2x d 2x x или x 0, dt 2 dt 2 то есть линейное дифференциальное уравнение второго порядка с постоянными коэффициентами с одной неизвестной функцией x . Составляя характеристическое уравнение 2 1 0 и определяя его решения 1, 2 i , находим общее решение этого уравнения. x t C1 cos t C 2 sin t . Из первого уравнения системы следует, что y (1.37) dx , то есть dt y t C1 sin t C 2 cos t . (1.38) Подставим начальные данные в равенства (1.37) и (1.38). Полагая в этих равенствах t t 0 0 , x0 x0 и y 0 y 0 , определяем значения произвольных постоянных C1 x0 , C2 y0 . Таким образом, частное решение заданной системы имеет вид: x t x0 cos t y 0 sin t , y t x 0 sin t y 0 cos t . (1.39) Разделив и домножив обе части равенств (1.39) на величину A x02 y02 , получим y y x x xt A 0 cos t 0 sin t , y t A 0 sin t 0 cos t . A A A A 2 2 x x y Поскольку 0 0 1 , то примем 0 за синус некоторого угла A A A y , а 0 за косинус угла . В этом случае решение системы может быть A записано в виде xt Asin cos t cos sin t , y t Acos cos t sin sin t или 34 xt A sin t , y t A cost . (1.40) Возводя обе части выражений (1.40) в квадрат и складывая получаемые при этом выражения, исключим из найденного решения (1.40) параметр t и получим уравнение фазовой траектории заданной системы x 2 y 2 A2 . (1.41) Таким образом, фазовыми траекториями заданной системы являются окружности, имеющие центр в начале координат и радиус A x02 y02 . Уравнения (1.40) определяют текущие координаты точки M xt , y t , которая начинает свое движение в момент времени t 0 0 в точке M 0 x0 , y0 и движется по окружности (1.41) (рис. 1.3). Из уравнений системы следует: так как y x , то при xt 0 , t t 0 , функция y t убывает (точка M 1 на рис. 1.5), а при xt 0 , t t 0 , функция y t возрастает (точка M 2 на рис. 1.3). Изменяя произвольно начальные данные x0 , y 0 , получаем все возможные фазовые траектории (рис. 1.4). При А = 0 уравнение (1.41) примет вид x 2 y 2 0 , то есть фазовая траектория заданной системы будет представлять собой точку покоя x(t) = 0, y(t) = 0. Рис. 1.3 Рис. 1.4 Интегральные кривые данной системы представляют собой в пространстве Oxyz винтовые линии с шагом h 2 и общей осью Ot , которая также является интегральной кривой (рис. 1.5). Точка N xt , y t , t 35 на рис. 1.5, где xt и y t определяются согласно формулам (1.40), начинает свое движение от точки N 0 x0 , y 0 , t 0 и с возрастанием t поднимается по винтовой линии расположенной на цилиндре (1.41), образующие которого параллельны оси Ot . Точка N 0 x0 , y 0 , t 0 совпадает с точкой M 0 x0 , y0 , а при любом t точка N xt , y t , t проектируются в точку M xt , y t фазовой траектории заданной системы. При различных положениях точки N 0 x0 , y 0 , t 0 интегральные кривые системы, соответствующие различным значениям A x02 y02 , проектируются на плоскость Oxy в различные фазовые траектории системы (рис. 1.5), а интегральные кривые, соответствующие одному и тому же Рис. 1.5 значению A x02 y02 , проектируется в одну и ту же фазовую траекторию (рис. 1.3). УПРАЖНЕНИЯ 1. Привести следующие дифференциальные уравнения и системы дифференциальных уравнений высших порядков к соответствующим нормальным системам: а) xy y xy 0 ; б) y y 0 ; y z 0, в) 3 x z 2 y 0; y z 0, г) z y 0. 2. Методом исключения найти решения следующих систем дифференциальных уравнений: 36 dx dt 2 x y, а) dy x 2 y; dt dx 2 dt y sin t , б) dy x ; dt 2 y dx dt y, dy в) x, dt dz dt x y z; dx dt y t , г) dy dt x t , x0 2, y 0 4. 3. Последовательным интегрированием найти решения следующих систем дифференциальных уравнений: dx dt x sin t , а) dy xe cos t ; dt dx dt 2 x y z , dy б) 2 y z, dt dz dt z. 4. Методом интегрируемых комбинаций найти решения следующих систем дифференциальных уравнений: dx 2 2 dt x y , а) dy 2 xy; dt y dx , dt t б) dy x . dt t 5. Построить фазовые траектории следующих систем дифференциальных уравнений, указав стрелками направление движения фазовой точки по этим траекториям с ростом времени t : 37 dx dt x, а) dy y; dt dx dt x, б) dy 2 y; dt dx dt x, в) dy y; dt dx dt y, г) dy x. dt Ответы. u v, v 1. а) v u , x где u y, v y ; u v, v w, б) w u , где u y, v y , w y ; u v, u v, v w, v w, в) г) w q, 2 w u , q u , w где u y, v y, w z. где u y, v y , w z , q z . 2. а) xt e C1 cos t C2 sin t , y t e 2t C1 sin t C2 cos t ; 2t 1 xt C1e t C 2 e t cos t , 2 б) 1 y t C1e t C 2 e t sin t ; 2 xt C1e t C 2 e t , в) y t C1e C 2 e , t t г) z t C3e 2C1te ; t 3. а) xt C1e t cos t xt e t 2e t t 1, y t e t 2e t t 1. xt C1 C 2 t e 2t , , б) y t C 2 e 2t C3e t , y t C1t C 2 ; z t C3e t . 38 1 x y t C1 , 4. а) 1 t C2 ; x y 1 C1 xt 2 t C 2t , б) y t 1 C1 C t . 2 2 t 5. а) б) в) г) 39 ГЛАВА 2. ЛИНЕЙНЫЕ НОРМАЛЬНЫЕ СИСТЕМЫ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ С ПОСТОЯННЫМИ КОЭФФИЦИЕНТАМИ §2.1. Структура общего решения линейной нормальной системы дифференциальных уравнений с постоянными коэффициентами Линейной нормальной системой дифференциальных уравнений с постоянными коэффициентами называется система вида: dx1 dt a11 x1 a12 x2 ... a1n xn f1 t , dx2 a x a x ... a x f t , 21 1 22 2 2n n 2 dt dxn a x a x ... a x f t , n1 1 n2 2 nn n n dt (2.1) где xi , i 1, n – искомые функции аргумента t , aij , i 1, n, j 1, n – действительные числа, f i t , i 1, n , t a; b – некоторые заданные функции. Числа aij называются коэффициентами, а функции f i t – свободными членами системы (2.1). Если f i t 0, t a; b , i 1, n , то система (2.1) называется линейной однородной системой дифференциальных уравнений, в противном случае линейной неоднородной. Если функции f i t , i 1, n , являются непрерывными на интервале a; b , то для линейной системы (2.1) будут выполняться все условия теоремы 1.1 существования и единственности задачи Коши Рассмотрим линейную однородную систему дифференциальных уравнений, записанную в матричной форме 40 dX AX , dt (2.2) где dx1 dt x 1 a11 a12 dx2 a22 x 2 dX a X , dt , A 21 dt x dx an1 a n 2 n n dt a1n a2n . a nn x11 t x12 t x21 t x 22 t Теорема 2.1. Пусть X 1 t и X 2 t являются част x t x t n1 n2 ными решениями линейной однородной системы (2.2), тогда их линейная комбинация также является решением этой системы, то есть X t 1 X 1 t 2 X 2 t , или в развернутом виде x1 t 1 x11 t 2 x12 t , x2 t 1 x21 t 2 x22 t , … …, xn t 1 xn1 t 2 xn 2 t , где 1 и 2 – произвольные постоянные. Доказательство. ■ Покажем, что X t 1 X 1 t 2 X 2 t , где 1 и 2 – произвольные постоянные, а X 1 t и X 2 t - решения линейной однородной системы (2.2), также будет являться решением этой системы. Для чего докажем справедливость равенства dX AX 0 . dt Действительно, 41 dX d 1 X 1 2 X 2 AX A1 X 1 2 X 2 dt dt dX dX 2 dX dX 1 1 2 1 AX 1 2 AX 2 1 1 AX 1 2 2 AX 2 . dt dt dt dt Так как X 1 t и X 2 t есть решения системы (2.2) и, следовательно, dX 1 dX 2 справедливы равенства AX 1 и AX 2 , то dt dt dX dX 1 1 AX 1 2 2 AX 2 1 0 2 0 0 . Что и требовалось до dt dt казать. ■ Линейная комбинация любого конечного числа частных решений однородной системы (2.2) также будет являться решением этой системы. Рассмотрим условия, при которых линейная комбинация частных решений линейной однородной системы (2.2) является ее общим решением. Пусть однородная линейная система (2.2.) имеет n частных решений x1n t x11 t x12 t x t x t x t X 1 t 21 , X 2 t 22 , , X n t 2 n . x t x t x t n1 n2 nn Частные решения X 1 t , X 2 t , , X n t системы (2.2) называются линейно независимыми на интервале a; b , если равенство 1 X 1 t 2 X 2 t n X n t 0, t a; b , (2.3) справедливо только при 1 2 n 0 . Если равенство (2.3) справедливо, хотя бы при одном i , не равном нулю, то частные решения X 1 t , X 2 t , , X n t называются линейно зависимыми. Система n линейно независимых на интервале a; b частных решений X 1 t , X 2 t , , X n t линейной однородной системы (2.2) называется фундаментальной системой решений. Для того чтобы система частных решений X 1 t , X 2 t , , X n t была фундаментальной, необходимо и достаточно, чтобы ее определитель Вронского 42 W t x11 t x12 t x1n t x21 t x22 t x2 n t xn1 t xn 2 t xnn t , (2.4) был отличен от нуля, то есть W t 0 , t a; b . Теорема 2.2 (о структуре общего решения линейной однородной системы). Если частные решения X 1 t , X 2 t , , X n t линейной однородной системы (2.2) образуют фундаментальную систему решений, то общее решение этой системы X t представляет собой линейную комбинацию частных решений n X t Ci X i t , i 1 или в развернутом виде x1 t C1 x11 t C 2 x12 t Cn x1n t , x2 t C1 x21 t C 2 x22 t C n x 2n t , (2.5) xn t C1 xn1 t C 2 xn 2 t C n xnn t , где Ci , i 1, n – произвольные постоянные. Пусть хотя бы одна из функций f i t , i 1, n , в правых частях уравнений линейной системы (2.1) не равна тождественно нулю. Тогда имеем неоднородную систему dX AX F t , dt (2.6) f1 t f 2 t где F t . f t n Теорема 2.3 (о структуре общего решения линейной неоднородной системы). Общее решение X t линейной неоднородной системы диффе- 43 ренциальных уравнений (2.6) равно сумме общего решения X * t соответствующей однородной системы dX AX dt ~ и какого-нибудь частного решения X t данной неоднородной системы, то есть ~ X t X * t X t , (2.7) или в развернутом виде x1 t x1* t ~ x1 t , x2 t x2* t ~ x 2 t , ..., xn t xn* t ~ xn t . ~ Доказательство. ■ Так как X t есть частное решение линейной неоднородной системы (2.6), то справедливо равенство ~ dX ~ AX F t . dt Поскольку X * t – общее решение соответствующей однородной системы (2.2), то dX * AX * , dt причем X * t C1 X 1 t C 2 X 2 t ... C n X n t , где C1 , C 2 , ..., Cn – произвольные постоянные, а X 1 t , X 2 t , ..., X n t – частные решения системы (2.2). ~ Покажем, что вектор-функция X t X * t X t является решением неоднородной системы (2.6), то есть докажем равенство dX AX F t 0 . dt Действительно, ~ dX d X* X ~ AX F t A X * X F t dt dt 44 ~ dX * ~ * dX AX AX F t 0 0 0 . dt dt ~ Докажем теперь, что X t C1 X 1 t C 2 X 2 t ... Cn X n t X t есть общее решение неоднородной системы (2.6), то есть докажем, что входящие в него произвольные постоянные можно подобрать так, чтобы удовлетворялись начальные условия x1 t0 x10 , x2 t0 x20 , ..., xn t0 xn0 , каковы бы ни были числа t0 , x10 , x20 , ..., xn0 . Подставляя начальные данные в выражение для X t , получаем систему для определения C1 , C 2 , ..., Cn : x10 0 x2 ... x0 n C1 x11 t 0 C 2 x12 t 0 ... C n x1n t 0 ~ x1 t 0 , C x t C x t ... C x t ~ x t , 1 21 0 2 22 0 n 2n 0 2 0 ... ... ... ... ... ... ... ... ... ... ... C1 xn1 t 0 C 2 xn 2 t 0 ... C n xnn t 0 ~ xn t 0 , или C1 x11 t 0 C 2 x12 t 0 ... C n x1n t 0 ~ x1 t 0 x10 , x2 t 0 x20 , C1 x 21 t 0 C 2 x22 t 0 ... C n x2 n t 0 ~ ... ... ... ... ... ... ... ... ... ... ... ... C x t C x t ... C x t ~ xn t 0 xn0 . 1 n1 0 2 n2 0 n nn 0 (2.8) Определитель матрицы системы (2.8) есть определитель Вронского для системы функций X 1 t 0 , X 2 t 0 , ..., X n t 0 и он отличен от нуля, так как функции X 1 t , X 2 t , ..., X n t образуют фундаментальную систему решений, соответствующей однородной системы (2.2). Следовательно, система (2.8) разрешима относительно C1 , C 2 ,..., Cn , то есть существуют такие значения произвольных постоянных C1 , C 2 ,..., Cn , при которых формула (2.7) определяет решение неоднородной системы (2.6), удовлетворяющее произвольным начальным условиям. ■ Общее решение линейной нормальной системы дифференциальных уравнений с постоянными коэффициентами может быть найдено общими 45 методами интегрирования нормальных систем – методом исключения (см. пример 1.1 и пример 1.6) последовательным интегрированием (см. пример 1.2) и методом интегрируемых комбинаций (см. пример 1.3). Далее будут рассмотрены специальные методы интегрирования линейной нормальной системы с постоянными коэффициентами, учитывающие особенности такой системы. Поскольку система из n линейных дифференциальных уравнений с постоянными коэффициентами эквивалентна одному линейному дифференциальному уравнению n -го порядка с постоянными коэффициентами, то методы интегрирования такого уравнения (метод Эйлера, метод Лагранжа, метод неопределенных коэффициентов и так далее) оказалось возможным распространить и на эквивалентную ему систему дифференциальных уравнений. Решение линейной однородной системы с постоянными коэффициентами может быть найдено также с помощью матричного метода, основанного на использовании матричной формы записи этой системы и методов линейной алгебры. §2.2. Методы решения линейных однородных систем с постоянными коэффициентами 2.2.1. Метод Эйлера Рассмотрим линейную однородную систему дифференциальных уравнений с постоянными коэффициентами: dx1 dt a11 x1 a12 x2 a1n xn , dx2 a x a x a x , 21 1 22 2 2n n dt dxn a x a x a x . n1 1 n2 2 nn n dt (2.9) Согласно методу Эйлера частное решение системы (2.9) ищут в виде x1 t 1e t , x2 t 2 e t , , xn t n e t , (2.10) где , 1 , 2 , , n – постоянные величины. Подставляя выражения (2.10) для неизвестных функций x1 t , x2 t , , xn t в уравнения системы (2.9), получим систему уравнений 46 1e t a111e t a12 2 e t a1n n e t , t t t t 2 e a 211e a 22 2 e a 2 n n e , e t a e t a e t a e t , n n1 1 n2 2 nn n Сократив обе части каждого уравнения полученной системы на e t ( e t 0, t R ) и перенося в каждом уравнении все члены в одну часть, приходим к системе линейных однородных алгебраических уравнений: a11 1 a12 2 a1n n 0, a a a 0, 21 1 22 2 2n n an11 a n 2 2 a nn n 0. (2.11) В частности, при n 2 система (2.11) примет вид: a11 1 a12 2 0, a211 a 22 2 0, (2.11) а при n 3 : (a11 )1 a12 2 a13 3 0, a211 (a22 ) 2 a 23 3 0, a a (a ) 0. 31 1 32 2 33 3 2.11 Для того чтобы система (2.11) имела нетривиальное (ненулевое) решение, необходимо и достаточно, чтобы ее определитель был равен нулю: a11 a 21 a n1 a12 a22 an2 a1n a2n ann 0. (2.12) Уравнение (2.12), левая часть которого представляет собой многочлен степени n относительно , называется характеристическим уравнением, а его решения – характеристическими числами системы (2.9). Для нормальной системы двух линейных однородных дифференциальных уравнений с 47 постоянными коэффициентами характеристическое уравнение будет иметь вид (a11 ) a12 0 a 21 (a 22 ) (2.12) или 2 (a11 a22 ) (a11a22 a12 a21 ) 0 . Полагая в формуле (2.12) n 3 , получим вид характеристического уравнения системы трёх линейных однородных дифференциальных уравнений: a11 a12 a13 a 21 a22 a23 a31 a32 a33 0. 2.12 Характеристическое уравнение (2.12) имеет n корней 1 , 2 , ..., n с учетом их кратности, причем корни могут быть комплексными. Каждому корню i , характеристического уравнения (2.12) соответствует частное решение линейной однородной системы (2.9) x1i t 1i e i t , x2i t 2i e it , , xni t ni e it , (2.13) где 1i , 2i , ..., ni – неизвестные произвольные постоянные, которые при данном i удовлетворяют системе (2.11). Рассмотрим возможные случаи корней характеристического уравнения (2.12). Случай 1. Характеристическое уравнение (2.12) имеет n различных решений 1 , 2 , , n . Пусть все характеристические числа i , i 1, n , принимают действительные значения. Тогда подставляя по очереди каждое i в систему (2.11), находим соответствующее ему нетривиальное решение 1i , 2i , , ni этой системы. Заметим, что система (2.11) в силу равенства (2.12) имеет бесконечно много нетривиальных решений и из них выбирается одно любое ненулевое решение. Согласно формулам (2.13) определяем n частных решений линейной однородной системы дифференциальных уравнений (2.9): 48 x11 t 11e 1t , x21 t 21e 1t , , xn1 t n1e 1t , x12 t 12 e 2t , x22 t 22 e 2t , , xn 2 t n 2 e 2t , (2.14) x1n t 1n e nt , x 2n t 2 n e nt , , xnn t nn e nt . Найденные частные решения (2.14) линейной однородной системы дифференциальных уравнений (2.9) являются линейно независимыми, то есть образуют фундаментальную систему решение системы (2.9) (см. [9, 10]). Общее решение системы (2.9), как это следует из теоремы 2.2, будет представлять собой линейную комбинацию частных решений (2.14): x1 t C111e 1t C 212 e 2t Cn1n e nt , x2 t C1 21e 1t C2 22 e 2t C n 2 n e nt , xn t C1 n1e 1t C 2 n 2 e 2t C n nn e nt . Пример 2.1. Для системы дифференциальных уравнений dx1 dt x1 4 x2 , dx2 4 x x 1 2 dt найти общее решение методом Эйлера и определить частное решение, удовлетворяющее начальным условиям: x1 0 2, x2 0 4 . Решение. Используя формулу (2.12) , составляем характеристическое уравнение заданной системы 1 4 4 1 0, или 2 2 15 0 . 49 Корнями характеристического уравнения являются 1 5 ; 2 3 . Данные значения будем подставлять в систему вида (2.11) для определения 1 и 2 : 1 1 4 2 0, . 4 1 0 . 1 2 (2.15) Подставляя 1 5 в систему (2.15), получим систему алгебраических уравнений 411 4 21 0, 411 4 21 0, Эта система эквивалентна одному уравнению 411 4 21 0 , из которого находим, что 21 11 . Пусть, например, 11 1 , тогда 21 1 . Решение заданной системы дифференциальных уравнений, соответствующее корню характеристического уравнения 1 5 , будет иметь вид x11 t 11e 5t ; x21 t 21e 5t или x11 t e 5t ; x21 t e 5t . (2.16) Полагая в системе (2.15) 2 3 , получим систему алгебраических уравнений 412 4 22 0, 412 4 22 0. Умножив второе уравнение системы на 1 , приходим к системе уравнений 412 4 22 0, 412 4 22 0, которая эквивалентна одному уравнению 412 4 22 0 . Из этого уравнения следует, что 12 22 . Если положить, например, 12 1 , то 22 1 . Таким образом, частное решение заданной системы дифференциальных уравнений, соответствующее характеристическому числу 2 3 , имеет вид: 50 x12 t 12 e 3t ; x22 t 22 e 3t или x12 t e 3t ; x22 t e 3t . (2.17) Частные решения (2.16) и (2.17) заданной системы дифференциальных уравнений действительно образуют фундаментальную систему решений исходной системы, так как выполняется условие W t e 5t e 5t e 3t e 3t e 2t e 2t 2e 2t 0 , t ; . Общее решение заданной системы представляет собой линейную комбинацию частных решений (2.16) и (2.17): x1 t C1 x11 t C2 x12 t , x2 t C1 x21 t C 2 x22 t или x1 t C1e 5t C 2 e 3t , x2 t C1e 5t C 2 e 3t . Подставляя в найденное общее решение начальные данные t 0, x1 0 2, x2 0 4 , получим систему алгебраических уравнений для определения C1 и C2 C1 C 2 2, C1 C 2 4. Решая эту систему, находим C1 3, C 2 1. Таким образом, решение соответствующее заданным начальным данным имеет вид: x1 t 3e 5t e 3t , x2 t 3e 5t e 3t . Пусть среди корней характеристического уравнения (2.12) имеются корни, принимающие комплексные значения. Если a ib является корнем характеристического уравнения (2.12), то и a ib также будет являться его корнем. Комплексно-сопряженным корням будут соответст51 вовать два линейно независимых комплексных частных решения системы (2.9) x11 t 11e a ib t , x21 t 21e a ib t , ..., xn1 t n1e a ib t , x12 t 12 e aib t , x22 t 22 e a ib t , ..., x n 2 t n 2 e a ib t (2.18) . Согласно теореме 2.1 в качестве решений системы (2.9) можно взять также линейные комбинации частных решений (2.18), например, следующего вида x t xk 2 t ~ xk1 t k1 , k 1, n, 2 (2.19) x t x t k2 ~ xk 2 t k1 , k 1, n. 2i Покажем, что частные решения (2.19) в отличие от решений (2.18) являются действительными частными решениями однородной системы (2.9). Поскольку, решения системы (2.11) k1 и k 2 , k 1, n , найденные соответственно при a ib и a ib , являются комплексно сопряженными: k1 pk iqk , k 1, n , и k 2 pk iqk , k 1, n . Следовательно, система комплексных частных решений (2.18) примет вид: xk1 t pk iqk e at cos bt i sin bt e at pk cos bt qk sin bt ie at pk sin bt qk cos bt , k 1, n xk 2 t pk iq k e at cos bt i sin bt e at pk cos bt qk sin bt ie at pk sin bt qk cos bt , k 1, n . В этом случае система частных решений (2.19) будет представлять собой систему действительных решений: e ~ xk1 t at pk cos bt qk sin bt ie at pk sin bt qk cos bt 2 e at p k cos bt q k sin bt ie at p k sin bt q k cos bt 2 52 e at p k cos bt q k sin bt Re x k 1 t , k 1, n ; e ~ xk 2 t at pk cos bt qk sin bt ie at pk sin bt qk cos bt 2i e at pk cos bt qk sin bt ie at pk sin bt qk cos bt 2i e at pk sin bt qk cos bt Im x k1 t , k 1, n . Таким образом, если известно комплексное частное решение xk1 t k1e aib t , k 1, n , однородной системы (2.9), то, отделяя в нем действительные и мнимые части, находим действительные частные решения этой системы соответствующие двум комплексно сопряженным корням a bi и a bi : ~ xk1 t Re x k1 t , k 1, n, ~ x t Im x t , k 1, n. k2 (2.20) k1 В случае n 2 система действительных частных решений (2.23) записывается следующим образом: ~ x11 t Re x11 t , ~ x 21 t Re x21 t , ~ x t Im x t , ~ x t Im x t . 12 11 22 (2.21) 21 Частные решения (2.20) будут линейно независимыми и в совокупности с другими линейно независимыми частными решениями линейной однородной системы (2.9) будут образовывать фундаментальную систему решений этой системы. Пример 2.2. Найти решение системы дифференциальных уравнений методом Эйлера: dx1 dt 2 x1 x 2 , dx2 x 2 x . 1 2 dt 53 Решение. Характеристическое уравнение заданной системы согласно (2.12) имеет вид 2 1 1 2 0 или 2 4 5 0 . Его корнями являются 1 2 i и 2 2 i . Подставляя 1 2 i в систему вида (2.11) 2 1 2 0, 1 2 2 0, получим систему относительно неизвестных 11 и 21 i11 21 0, 11 i 21 0. Умножив первое уравнение на i , получим систему из двух одинаковых уравнений 11 i 21 0, 11 i 21 0. Эта система эквивалентна одному уравнению i11 21 0 , из которого находим, что 21 i11 . Полагая, например, 11 1 , получим, что 21 i . Таким образом, комплексное частное решение соответствующее корню 1 2 i будет иметь вид x11 t 11e 2i t , x21 t 21e 2i t или x11 t e 2i t , x21 t ie 2i t . Действительные частные решения заданной системы определим по формулам (2.21): 54 ~ x11 t Re(e 2i t ), ~ x21 t Re(ie 2i t ) , ~ x t Im(e 2i t ), ~ x t Im(ie 2i t ) . 12 22 Учитывая, что e 2i t e 2t cos t i sin t , имеем: ~ x11 t e 2t cos t , ~ x21 t e 2t sin t ; ~ x t e 2t sin, ~ x t e 2t cos t. 12 (2.23) 22 Определитель Вронского, составленный для системы частных решений (2.23), будет отличен от нуля: W t e 2t cos t 2t e 2t sin t 2t e 2t cos 2 t sin 2 t e 2t 0 , t ; . e sin t e cos t Это подтверждает (но не доказывает) справедливость сделанного выше замечания относительно линейной независимости этих частных решений. Следовательно, частные решения (2.23) образуют фундаментальную систему решений заданной системы, и ее общее решение может быть записано как линейная комбинация этих частных решений: x t C ~ x t C ~ x t , 1 1 11 2 12 x2 t C1~ x21 t C 2 ~ x22 t , или x1 t C1e 2t cos t C 2 e 2t sin t , x2 t C1e sin t C 2 e cos t. 2t 2t Случай 2. Среди корней характеристического уравнения (2.12) имеются кратные. Пусть действительный корень характеристического уравнения (2.12) кратности k . Тогда этому корню будет соответствовать k линейно независимых частных решений, каждое из которых будет иметь вид x1 t 1 t e t , x 2 t 2 t e t , , xn t n t e t , (2.24) где i t Aik 1t k-1 Aik 2t k- 2 ... Ai1t Ai 0 , i 1, n . Значения коэффициентов Aij , i 1, n, j 0, k 1 многочленов i t , i 1, n , находим методом неопределенных коэффициентов. Для чего подставляем решение (2.24) в уравнения системы (2.9), а затем приравниваем коэффициенты при одинаковых степенях переменной t в обеих частях получаемых равенств. В ре55 зультате получаем систему алгебраических уравнений для определения неизвестных коэффициентов Aij , i 1, n, j 0, k 1 , среди которых k коэффициентов принимают произвольные значения, а остальные выражаются через них. Полагая поочередно один из k произвольных коэффициентов равным единице, а остальные равными нулю, находим k линейно независимых частных решений системы (2.9) вида (2.24), соответствующих корню характеристического уравнения (2.12) кратности k . Пример 2.3. Найти решение системы дифференциальных уравнений методом Эйлера: dx1 dt x1 x2 x3 , dx2 x1 x2 x3 , dt dx3 dt x 2 2 x3 . Решение. Составляем характеристическое уравнение заданной системы согласно формуле 2.12 : 1 1 1 1 0 1 1 1 0 2 или 1 2 3 2 0 . Корнями характеристического уравнения являются 1 2, 2 3 1 . Корню 1 2 будет соответствовать частное решение x11 t 11e 2t , x21 t 21e 2t , x31 t 31e 2t . Подставляя 1 2 в систему вида 2.11 , получим систему алгебраических уравнений 11 21 31 0, 11 21 31 0, 0 21 или 56 11 31 0, 11 31 0, 0. 21 Последняя система эквивалентна системе уравнений 11 31 0, 21 0, из которой находим, что 21 0, 31 11 . Полагая 11 1 , получим 31 1 . Таким образом, корню 1 2 соответствует частное решение вида: x11 t e 2t , x21 t 0, x31 t e 2t . Двукратному корню 2 3 1, соответствуют два решения вида: x12 t A1t B1 e t , x 22 t G1t D1 e t , x32 t E1t F1 e t , x13 t A2 t B2 e t , x23 t G2 t D2 e t , x33 t E 2t F2 e t . Подставив выражения x12 t , x22 t и x32 t в уравнения заданной системы, получим систему уравнений A1e t A1t B1 e t A1t B1 e t G1t D1 e t E1t F1 e t , t t t t t G1e G1t D1 e A1t B1 e G1t D1 e E1t F1 e , E e t E t F e t G t D e t 2 E t F e t . 1 1 1 1 1 1 1 Разделив обе части полученных уравнений на e t ( e t 0, t R ), приходим к системе уравнений A1 A1t B1 A1t B1 G1t D1 E1t F1 , G1 G1t D1 A1t B1 G1t D1 E1t F1 , E E t F G t D 2 E t 2 F . 1 1 1 1 1 1 1 Приравняем коэффициенты при одинаковых степенях t 1 и t 0 . Из первого уравнения получим: t 1 A1 A1 G1 E1 , t 0 A1 B1 B1 D1 F1 ; 57 из второго: t 1 G1 A1 G1 E1 , t 0 G1 D1 B1 D1 F1 ; из третьего: t 1 E1 G1 2 E1 , t 0 E1 F1 D1 2 F1. Составим из полученных алгебраических уравнений ситему для определения неизвестных коэффициентов A1 , B1 , D1 , E1 , F1 , G1 : A1 E1 0, G E 0, 1 1 A1 D1 F1 0, B G F 0, 1 1 1 D1 F1 E1 0. (2.25) При решении системы (2.25) два искомых коэффициента k 2 принимают произвольные значения (то есть являются свободными переменными системы (2.25)), а остальные искомые коэффициенты выражаются через эти два коэффициента (то есть являются базисными переменными системы (2.25)). Пусть, например, произвольные значения принимают коэффициенты A1 и B1 , тогда из системы (2.25) находим выражения остальных коэффициентов: E1 A1 , G1 A1 , F1 B1 A1 , D1 B1 2 A1 . Полагая A1 1 и B1 0 , имеем G1 1, D1 2, E1 1, F1 1 , и, следовательно, x12 t te t , x 22 t t 2e t , x32 t t 1e t . Уравнения для определения неизвестных A2 , B2 , G2 , D2 , E2 , F2 получаются аналогичным образом: 58 коэффициентов A2 E2 0, G E 0, 2 2 A2 D2 F2 0, B G F 0, 2 2 2 D2 F2 E2 0. Отсюда, полагая A2 0 и B2 1, находим значения остальных постоянных G2 0, D2 1, E2 0, F2 1 и, следовательно, x13 t e t , x23 t e t , x33 t e t . Проверим, что найденные частные решения образуют фундаментальную систему решений. Для этого составим для системы указанных частных решений определитель Вронского и убедимся, что он отличен от нуля: e 2t W t 0 e 2t te t t 2et t 1et et e t e 4t 1 0 , t ; . et Общее решение согласно формуле (2.5) запишется в виде: x1 t C1e 2t C 2 e t C3e t , x2 t C 2 t 2e t C3 e t , x3 t C1e 2t C2 t 1e t C3e t . Если a ib , b 0 – комплексный корень кратности k , то a ib также является корнем характеристического уравнения той же кратности k . Корню a ib кратности k будет соответствовать k линейно независимых частных решений системы (2.9), каждое из которых будет иметь вид: x1 t 1 t e a ib t , x2 t 2 t e a ib t , ..., xn t n t e a bi t , (2.26) где i t Aik 1t k-1 Aik 2t k- 2 ... Ai1t Ai 0 , i 1, n . Коэффициенты Aij , i 1, n, j 0, k 1 , находятся методом неопределенных коэффициентов, как описано выше (см. с. 53). Отделяя в k комплексных частных решениях вида (2.26) вещественные и мнимые части, найдём 2k линейно независимых действительных частных решений системы (2.9) соответ- 59 ствующих комплексно сопряженным корням a ib и a ib кратности k . Методом Эйлера может быть проинтегрирована любая линейная однородная система с постоянными коэффициентами. 2.2.2. Матричный метод Прежде, чем рассмотреть матричный метод решения системы линейных однородных дифференциальных уравнений (2.2), сформулируем и докажем теорему, устанавливающую достаточные условия существования решения такой системы. Вектор u 0 называется собственным вектором квадратной матрицы А порядка n , если для любого числа справедливо равенство Au u , при этом число называется собственным значением матрицы А. Собственные значения матрицы А являются корнями характеристического уравнения det A E 0 , (2.27) где Е – единичная матрица порядка n . Уравнение (2.28) является матричной формой записи уравнения (2.12). Если все собственные значения 1 , 2 , , n матрицы А различны, то все собственные векторы u1 , u 2 , , u n линейно независимы и существует квадратная матрица Т, приводящая матрицу А к диагональному виду, то есть такая, что 0 1 2 T 1 AT . 0 n Столбцами матрицы Т являются координаты собственных векторов u1 , u 2 , , u n матрицы А. Теорема 2.3. Пусть для линейной однородной системы дифференциальных уравнений с постоянными коэффициентами (2.2) собственные 60 значения 1 , 2 , , n матрицы системы А различны. Тогда общее решение этой системы имеет вид X t C1e 1t u1 C 2 e 2t u2 C n e nt u n , (2.28) u1i u где ui 2i , i 1, n – собственные векторы матрицы системы А, а u ni C j , j 1, n – произвольные постоянные. Доказательство. ■ Введем новый неизвестный вектор-столбец y1 y Y 2 , где yi yi t , i 1, n по формуле y n X T Y , (2.29) где Т – матрица, приводящая матрицу А к диагональному виду. Подставляя данное выражение в систему (2.2), получим dY T ATY . dt Умножая обе части последнего равенства на матрицу T 1 , приходим к системе дифференциальных уравнений dY T 1 ATY , dt или в развернутом виде dy1 dt 1 y1 , dy 2 y , 2 2 , dt dy n y . n n dt Полученная система состоит из n независимых уравнений. Интегрируя каждое из этих уравнений, определим общее решение этой системы 61 y1 t C1e 1t , y 2 t C 2 e 2t , , y n t C n e nt , где C1 , C 2 , , C n – произвольные постоянные. Вводя единичные n-компонентные вектор-столбцы 1 0 0 0 1 0 0 0 0 e1 , e 2 , , e n , 0 0 0 0 0 1 данное решение можно представить в виде Y t C1e 1t e1 C 2 e 2t e 2 Cn e nt e n . (2.30) Учитывая, что X TY и столбцы матрицы Т есть собственные векторы матрицы А, то Te j u j , u j – j-ый собственный вектор матрицы А. Поэтому подставляя Y t (2.30) в уравнение (2.29), получим формулу (2.28) X t C1e 1t u1 C 2 e 2t u2 C n e nt u n . ■ Замечание. Правая часть равенства (2.28) представляет собой линейную комбинацию линейно независимых частных решений X 1 t e 1t u1 , X 2 t e 2t u 2 , …, X n t e nt u n . линейной однородной системы дифференциальных уравнений (2.2). Таким образом, если корни характеристического уравнения (2.27) линейной однородной системы (2.2) различны, то для получения общего решения этой системы матричным методом: 1) составляем характеристическое уравнение вида (2.27) и находим его решения 1 , 2 , , n , являющиеся собственными значениями матрицы системы A ; 2) находим все собственные векторы u1 , u 2 , , u n матрицы системы A; 62 3) выписываем общее решение линейной однородной системы дифференциальных уравнений (2.2) по формуле (2.28). Корни характеристического уравнения (2.27) могут быть действительными и комплексными. Пусть все корни характеристического уравнения различные и действительные. В этом случае решение линейной однородной системы определяется по формуле (2.28). Пример 2.4. Найти решение системы дифференциальных уравнений матричным методом: dx1 dt 3 x1 x2 , dx2 2 x 2 x . 1 2 dt Решение. Составляем характеристическое уравнение 3 1 2 2 0, или 2 5 4 0 . Определяем корни характеристического уравнения 1 4, 2 1 . u 2) Собственный вектор u1 11 соответствующий корню 1 4 на u12 ходим из равенства Au1 1u1 , которое в развернутом виде представляет собой систему линейных алгебраических уравнений 3u11 u12 4u11 , 2u11 2u12 4u 22 , или u11 u12 0, 2u11 2u12 0. 63 Умножив первое уравнение системы на 2 , приходим к системе уравнений 2u11 2u12 0, 2u11 2u12 0, которая эквивалентна одному уравнению u11 u12 0 . Из этого уравнения имеем u11 u12 . Полагая, например, u12 1, получим u11 1 . Следовательно, 1 u1 . 1 u u 2 21 соответствующий корню u 22 2 1 находим из равенства Au 2 2u 2 , которое в развернутом виде представляет собой систему линейных алгебраических уравнений Аналогично, собственный вектор 3u 21 u 22 u 21 , 2u 21 2u 22 u 22 , или 2u 21 u 22 0, 2u 21 2u 22 0. Последняя система эквивалентна одному уравнению 2u 21 u 22 0, из которого находим u 22 2u 21 . Пусть u 21 1 , тогда u 22 2 . Значит, 1 u 2 . 2 3) Пользуясь формулой (2.28), получаем общее решение системы дифференциальных уравнений 1 1 X t C1e 4t C2 e t , 1 2 или в развернутом виде 64 x1 t C1e 4t C 2 e t , x2 t C1e 4t 2C 2 e t . Пусть корни характеристического уравнения различны и среди них имеются комплексные корни. Как уже отмечалось в предыдущем пункте (см. с. 48), наряду с комплексным корнем характеристическое уравнение (2.27) будет иметь и корень , комплексно сопряженный с . Если u – собственный вектор, отвечающий собственному значению , то собственному значению , которому отвечает собственный вектор u , комплексно сопряженный с u . В этом случае линейно независимые частные решения X 1 t e t u и X 2 t e t u системы (2.2), соответствующие и будут комплексно сопряженными. Вместо комплексных линейно независимых решений X 1 t и X 2 t в качестве решений системы (2.2) можно взять также линейные комбинации этих решений (см. теорему 2.1), например, 1 1 ~ ~ X 1 (t ) ( X 1 (t ) X 2 (t )) , X 2 (t ) ( X 1 (t ) X 2 (t )) . 2 2i Проводя рассуждения аналогичные тем, что были сделаны в пункте 2.2.1 (см. с. 51) можно показать, что эти линейные комбинации комплексных решений являются действительными решениями системы (2.2): ~ ~ X 1 t Re e t u , X 2 t Im e t u . Таким образом, действительная и мнимая части комплексного решения X 1 t e t u линейной однородной системы дифференциальных уравнений (2.2) являются линейно независимыми действительными решениями этой системы, соответствующими паре комплексно-сопряженных собственных значений и . Пример 2.5. Найти решение системы дифференциальных уравнений матричным методом: dx1 dt x1 3 x2 , dx2 3 x x . 1 2 dt Решение. 1) Составляем характеристическое уравнение системы 65 1 3 3 1 2 0 1 9 0 . Корнями характеристического уравнения являются 1 1 3i , 2 1 3i . 2) Находим собственный вектор матрицы соответствующий собственному числу 1 1 3i . Из равенства Au1 1u1 , получаем систему уравнений u11 3u12 1 3i u11 , 3u11 u12 1 3i u12 , или 3iu11 3u12 0, 3u11 3iu12 0. Умножая первое уравнение системы на i , приходим к системе уравнений 3u11 3iu12 0, 3u11 3iu12 0, которая эквивалентна уравнению 3u11 3iu12 0 . Из этого уравнения следует, что u11 iu12 . Полагая, например, u12 i , имеем u11 1 . Значит 1 u1 . i 3) Поскольку 1 1 cos 3t i sin 3t e 13i t e t (cos 3t i sin 3t ) e t i i sin 3 t i cos 3 t cos 3t sin 3t e t ie t , sin 3 t cos 3 t то действительное решение системы заданной системы имеет вид 66 X t C1 Re e 13i t 1 C2 Im e 13i t i 1 cos 3t sin 3t C 2 e t , C1e t i sin 3t cos 3t или в развернутом виде x1 t C1e t cos 3t C 2 e t sin 3t , x2 t C1e t sin 3t C 2 e t cos 3t. 67 §2.3. Методы решения линейной неоднородной системы дифференциальных уравнений c постоянными коэффициентами 2.3.1. Метод вариации произвольных постоянных Рассмотрим систему линейных неоднородных уравнений с постоянными коэффициентами (2.6). Предположим, что общее решение соответствующей линейной однородной системы (2.2) известно и, как следует из теоремы 2.2, оно имеет вид: n X t Ci X i t . i 1 где Ci , i 1, n – произвольные постоянные, а X i t , i 1, n – частные решения соответствующей однородной системы (2.2). Причем частные решения X i t , i 1, n , образуют фундаментальную систему решений однородной системы (2.2) и для них справедливы тождества dX i AX i t , i 1, n . dt (2.31) Тогда, согласно методу вариации произвольных постоянных, общее решение неоднородной системы (2.6) ищется в виде n X t Ci t X i t , (2.32) i 1 где Ci t , i 1, n – неизвестные, непрерывно дифференцируемые функции от t. Продифференцировав обе части последнего равенства по t, имеем n n dX i dC dX Ci t i X i t . dt i 1 dt i 1 dt Подставляя выражение X t (2.32) и выражение уравнения неоднородной системы (2.6) получим: n n dX i dC Ci t dt dt i X i t At Ci t X i t F t , i 1 i 1 или 68 (2.33) dX dt (2.33) в n dX i n dCi C t AX t X i t F t . i dt i i 1 dt i 1 Учитывая равенства (2.31), приходим к системе уравнений линейных dCi относительно неизвестных функций , i 1, n : dt n dCi X i t F t , dt i 1 или в развернутом виде dC 2 dC n dC1 dt x11 t dt x12 t ... dt x1n t f1 t , dC1 x t dC 2 x t ... dC n x t f t , 21 22 2n 2 dt dt dt dC1 x t dC 2 x t ... dC n x t f t . n2 nn n dt n1 dt dt (2.34) При n 2 система (2.34) принимает вид: dC 2 dC1 x t x12 t f1 t , dt 11 dt dC1 x t dC 2 x t f t . 22 2 dt 21 dt ( 2.34 ) Определитель системы (2.34) является определителем Вронского W t фундаментальной системы решений X 1 t , X 2 t , , X n t . Этот определитель отличен от нуля при всех t a; b и, следовательно, система (2.34) имеет единственное решение dC dC1 dC 1 t , 2 2 t , , n n t . dt dt dt Интегрируя полученные равенства, находим ~ Ci t i t dt Ci , i 1, n , ~ где i t dt , i 1, n – первообразные функций i t , i 1, n , а Ci , i 1, n – произвольные постоянные. 69 Подставляя Ci t , i 1, n , в выражение (2.32) общего решения линейной неоднородной системы (2.6), получим n n ~ X t i t dt X i t Ci X i t . i 1 (2.35) i 1 Заметим, что первое слагаемое в равенстве (2.35) есть ни что иное, как частное решение неоднородной системы, а второе представляет собой общее решение однородной системы. Методом Лагранжа может быть проинтегрирована любая линейная неоднородная система дифференциальных уравнений с постоянными коэффициентами. Пример 2.6. Найти решение системы дифференциальных уравнений методом Лагранжа: dx1 -t dt x1 4 x2 2e , dx2 4 x x e -t . 1 2 dt Решение. Общее решение соответствующей однородной системы dx1 dt x1 4 x2 , dx2 4 x x 1 2 dt было найдено в примере 2.1 пункта 2.2.1. Оно имеет вид x1 t C1e 5t C 2 e 3t , x2 t C1e 5t C 2 e 3t . Общее решение неоднородной системы будем искать в виде x1 t C1 t e 5t C2 t e 3t , (2.36) x2 t C1 t e 5t C2 t e 3t . Составим систему вида ( 2.34 ) для определения 70 dC1 dC 2 и : dt dt dC1 5t dC 2 3t t dt e dt e 2e , dC1 e 5t dC 2 e 3t e t . dt dt Складывая почленно уравнения этой системы, получим уравнение 2 dC2 3t e 3e t , dt из которого находим dC2 3 4t e . dt 2 Подставляя dC 2 dt в первое уравнение данной системы, приходим к уравнению dC1 5t 3 t e e 2e t , dt 2 из которого имеем dC1 1 4t e . dt 2 Интегрируя обе части полученных для dC1 dC 2 и dt dt уравнений, определим 1 3 ~ ~ C1 t e 4t C1 , C2 t e 4t C 2 . 8 8 Подставляя C1 t и C2 t в выражения (2.36), находим общее решение неоднородной системы: 1 ~ ~ x1 t e t C1e 5t C 2 e 3t , 4 1 ~ ~ x2 t e t C1e 5t C 2 e 3t . 2 71 2.3.2. Метод Даламбера Системы линейных неоднородных дифференциальных уравнений с постоянными коэффициентами (2.1) можно интегрировать общими методами решения нормальных систем, изложенными в §1.3, в частности, методом интегрируемых комбинаций. Способ построения интегрируемых комбинаций для данных систем дифференциальных уравнений получил название метода Даламбера. Рассмотрим метод Даламбера на примере системы двух дифференциальных уравнений: dx1 dt a11 x1 a12 x2 f1 t , dx2 a x a x f t . 21 1 22 2 2 dt (2.37) Умножим второе уравнение данной системы на произвольное число k и сложим с первым уравнением, в результате получим уравнение dx1 dx k 2 a11 ka21 x1 a12 ka22 x2 f1 t kf 2 t . dt dt dx1 dx d x1 kx2 k 2 , и вынося из первых двух dt dt dt слагаемых в левой части полученного уравнения множитель a11 ka21 a11 ka21 0 , за скобку, приходим к уравнению линейному относительно x1 kx2 : Учитывая, что d x1 kx2 a ka22 a11 ka21 x1 12 x2 f1 t kf 2 t . dt a ka 11 21 (2.38) Пусть число k удовлетворяет равенству a12 ka22 k, a11 ka21 (2.39) то есть k является решением квадратного уравнения a21k 2 (a11 a22 )k a12 0 . (2.40) При выполнении равенства (2.39) дифференциальное уравнение (2.38) принимает вид: 72 d x1 kx2 a11 ka21 x1 kx2 f1 t kf 2 t . dt Решение полученного уравнения находим согласно формуле (1.26) (см. п. 1.3.2), полагая в ней pt a11 ka21 , g t f1 t kf 2 t и z x1 kx2 : x1 kx2 e a11 ka21 f t kf t e 1 2 a11 ka 21 t dt C , (2.41) где значение k определяется из решения квадратного уравнения (2.40). Пусть уравнение (2.40) имеет различные действительные решения k1 и k 2 . Тогда, подставляя k1 и k 2 по очереди в равенства (2.41), получим два первых интеграла системы (2.37), которые неявно будут определять её решение. Если уравнение (2.40) имеет два одинаковых действительных решения k1 k 2 или не имеет действительных решений, то найти решение линейной однородной системы дифференциальных уравнений с постоянными коэффициентами вида (2.37) методом Даламбера становится невозможным. Пример 2.7. Найти решение системы дифференциальных уравнений методом Даламбера: dx1 t dt 3 x1 4 x2 e , dx2 4 x 3 x 1. 1 2 dt Решение. Умножим второе уравнение на число k и прибавим к первому dx1 dx k 2 3 4k x1 4 3k x2 e t k , dt dt или d x1 kx2 3 4k x1 kx2 e t k , dt где k удовлетворяет уравнению 4 3k k. 3 4k Последнее уравнение перепишем в виде 73 (2.42) 4 3k k 3 4k , или 4k 2 4 0 . Откуда находим k1 1 и k 2 1 . При k1 1 общее решение уравнения (2.42), согласно формуле (2.41), имеет вид: x1 x2 e 34 t e 1e 3 4 t t dt C1 e t e 2t e t dt C1 1 e t e 2t e t C1 . 2 (2.43) Аналогично, находим: x1 x2 e 34 t e 1e t 3 4 t dt C 2 e 7 t e 6t e 7 t dt C 2 , 1 1 e 7 t e 6t e 7 t C 2 . 7 6 (2.44) Используя полученные равенства (2.43) и (2.44), записываем систему уравнений для определения искомых функций x1 и x 2 : 1 t t x1 x2 2 e 1 C1e , x1 x2 1 e t 1 C2 e 7 t . 6 7 Складывая, а затем вычитая почленно уравнения последней системы, находим общее решение системы C 1 4 C x1 (t ) e t 1 e t 2 e 7 t , 6 7 2 2 C 1 3 C x2 (t ) e t 1 e t 2 e 7 t . 3 7 2 2 74 2.3.3. Метод подбора Рассмотрим систему линейных неоднородных дифференциальных уравнений с постоянными коэффициентами dx1 dt a11 x1 a12 x 2 ... a1n xn f1 t , dx2 a x a x ... a x f t , 21 1 22 2 2n n 2 dt dxn a x a x ... a x f t , n1 1 n2 2 nn n n dt в которой функции, стоящие в правой части специальный вид: (2.45) f i t , i 1, n , имеют f i t Pmi t e at cos bt Qli t e at sin bt , i 1, n , (2.46) где Pmi t и Qli t – многочлены степени mi и li соответственно. В этом случае вид частного решения ~ xi , i 1, n , линейной неоднородной системы (2.45) подбирается, исходя из вида функций f i (t ), i 1, n , в правых частях уравнений системы, а также значений корней характеристического уравнения (2.12) соответствующей однородной системы (2.9): ~ ~ ~ xi (t ) Ppi k t e at cos bt Q pi k t e at sin bt , i 1, n . (2.47) ~ ~i Здесь Pp Q ip k t , i 1, n – многочлены степени p k k t , неопределенными коэффициентами ~ Ppik t Ai, p k t p k Ai , p k 1t p k 1 Ai ,1t Ai ,0 , i 1, n , с ~ Q ip k t Bi , p k t p k Bi , p k 1t p k 1 Bi,1t Bi ,0 , i 1, n , p равно наибольшему из чисел m max mi и l max li , а k есть кратность 1i n 1i n корня a bi характеристического уравнения (2.12). Причем считается, что k 0 , если a bi не является корнем характеристического уравнения. 75 ~i ~i Многочлены Pp k t и Q p k t , i 1, n , должны содержать все степени t от 0 до p k и неопределенные коэффициенты при одних и тех же степенях t в этих многочленах должны быть различны. Если в выражения для функций f i t , i 1, n , входит хотя бы одна из функций cos bt или sin bt , то общий вид частного решения ~ xi t , i 1, n , должен содержать обе эти функции. ~i Значения неопределенных коэффициентов многочленов Pp k t и ~i Q p k t , i 1, n , могут быть найдены методом неопределенных коэффициентов, то есть они могут быть определены из системы алгебраических уравнений, получаемой в результате подстановки выражений (2.47) в уравнения системы (2.45) и приравнивания коэффициентов при одинаковых степенях t . Как следует из теоремы 2.3, общее решение x1 t , x2 t , ..., xn t неоднородной системы (2.45) со свободными членами вида (2.46) будет представлять собой сумму общего решения x1* t , x2* t , ..., xn* t соответствующей однородной системы (2.9) и найденного частного решения ~ x1 t , ~ x2 t , ..., ~ xn t вида (2.47) неоднородной системы (2.45). Пример 2.8. Найти решение систем дифференциальных уравнений методом подбора: dx1 dt 2 x1 x2 3t , а) dx2 x 2 x 1; 1 2 dt dx1 dt x1 x2 cos t , б) dx2 2 x x sin t cos t . 1 2 dt Решение. а) Заданная система есть система линейных неоднородных дифференциальных уравнений с постоянными коэффициентами, в которых свободные члены являются функциями специального вида: f1 t 3t и f 2 t 1. Общее решение x1 t , x2 t неоднородной системы будет представлять собой сумму частного решения ~ x1 t , ~ x2 t этой системы, выбираемого согласно формуле (2.47), и общего решения x1* t , x2* t соответствующей однородной системы dx1 dt 2 x1 x 2 , dx2 x 2 x . 1 2 dt 76 В примере 2.2 п. 2.2.1 были найдены корни 1, 2 2 i характеристического уравнения соответствующей однородной системы, а также определено её общее решение, которое в отличие от примера 2.2 обозначим как x1* t , x2* t , то есть x1* (t ) C1e 2t cos t C 2 e 2t sin t , x2* (t ) C1e 2t sin t C 2 e 2t cos t. Определим вид частного решения ~ x1 t , ~ x2 t заданной неоднородной системы. Поскольку функция f1 t 3t есть многочлен первой степени m1 1 , а функция f 2 t 1 является многочленом нулевой степени m2 0 , то в формуле (2.47), взятой при n 2 , полагаем p maxm1 , m2 1 . Кроме того, функции f1 t и f 2 t не содержат показательной функции e at и тригонометрических функций cos bt и sin bt , поэтому a 0 и b 0 . Так как a bi 0 не является корнем характеристического уравнения, то k 0 . Таким образом, частное решение заданной неоднородной системы будет иметь вид ~ x1 t At B , ~ x2 t Ct D . (2.48) Значения неопределенных коэффициентов A, B, C и D найдем методом неопределенных коэффициентов. Подставляя решение (2.48) в заданную неоднородную систему, имеем: A 2 At B Ct D 3t , C At B 2Ct D 1. Приравняем коэффициенты при t 1 и t 0 в обеих частях данных равенств. Из первого равенства получим уравнения: t 1 0 2 A C 3, t 0 A 2 B-D , из второго: t 1 0 A 2C , t 0 A B 2 D 1. Приводя подобные в каждом из полученных уравнений, приходим к системе для определения неизвестных произвольных постоянных A, B, C , D : 77 2 A C 3, A 2 B D 0, A 2C 0, B C 2 D 1. Из этой системы находим: 5 14 3 2 A ; B ; C ; D . 6 25 5 25 Таким образом, общее решение заданной неоднородной системы имеет вид: 6 14 x1 t x1* t ~ x1 t C1e 2t cos t C2 e 2t sin t t , 5 25 3 2 x2 t x2* t ~ x2 t C1e 2t sin t C 2 e 2t cos t t . 5 25 б) Решение заданной линейной неоднородной системы дифференциальных уравнений есть сумма какого-либо частного решения ~ x1 t , ~ x2 t этой системы и общего решения x1 * t , x2 * t соответствующей однородной системы: dx1 dt x1 x2 , dx2 2 x x . 1 2 dt (2.49) Общее решение соответствующей однородной системы (2.49) найдем методом исключения. Для этого продифференцируем первое уравнение этой системы по переменной t : d 2 x1 dx1 dx2 . dt dt dt 2 dx1 dx x1 x2 и 2 2 x1 x2 , dt dt получаем уравнение относительно искомой функции x1 : Учитывая, что в последнем уравнении 78 d 2 x1 x1 . dt 2 Полученное уравнение является линейным однородным дифференциальным уравнением второго порядка с постоянными коэффициентами. Составляем для него характеристическое уравнение 2 1 0 и находим его корни 1, 2 i . Следовательно, общее решение уравнения d 2 x1 x1 , имеет вид: dt 2 x1 C1 cos t C 2 sin t . Из первого уравнения заданной системы выразим искомую функцию x2 : x2 dx1 x1 . dt Подставляя в полученное равенство функцию x1 C1 cos t C 2 sin t и dx1 C1 sin t C 2 cos t , находим искомую ее первую производную dt функцию x 2 : x2 C 2 C1 cos t C1 C 2 sin t . Таким образом, общее решение соответствующей однородной системы (2.49) имеет вид: x1 * (t ) C1 cos t C 2 sin t , x2 * (t ) C 2 C1 cos t C1 C 2 sin t . Поскольку f1 (t ) cos t и f 2 (t ) sin t cos t , следовательно a 0 , b 1, m1 l1 l2 p 0 . Кроме того k 1 , так как a bi i является корнем характеристического уравнения соответствующей однородной системы (2.49). Значит, частное решение заданной линейной неоднородной системы следует искать в виде: 79 ~ x1 (t ) A1t B1 cos t G1t D1 sin t , ~ x (t ) A t B cos t G t D sin t . 2 2 2 2 2 x1 (t ) , ~ x2 (t ) в заданную систему, Подставляя частные решения ~ получим: A1 cos t A1t B1 sin t G1 sin t G1t D1 cos t A1t B1 cos t G1t D1 sin t A2 t B2 cos t G 2 t D2 sin t cos t ; A2 cos t A2 t B2 sin t G2 sin t G2 t D2 cos t 2 A1t B1 cos t 2G1t D1 sin t A2 t B2 cos t G 2 t D2 sin t sin t cos t. Приравнивая коэффициенты при cos t , sin t , t cos t , t sin t в первом из полученных равенств, имеем: cos t A1 D1 B1 B2 1, sin t B1 G1 D1 D2 , t cos t G1 A1 A2 , t sin t A1 G1 G2 . Выполняя те же самые действия во втором из полученных равенств, получим: cos t A2 D2 2 B1 B2 1, sin t B2 G2 2 D1 D2 1, t cos t G2 2 A1 A2 , t sin t A2 2G1 G2 . Составляя из указанных уравнений систему и решая ее, находим значения коэффициентов A1 , A2 , B1 , B2 , G1 , G2 , D1 , D2 : A1 1, A2 G2 1, B1 B2 G1 D1 D2 0 . Таким образом, частное решение заданной линейной неоднородной системы есть совокупность функций ~ x1 (t ) t cos t , ~ x2 (t ) t cos t sin t . 80 Следовательно, общее решение заданной системы имеет вид: x1 t x1 * t ~ x1 (t ) C1 cos t C 2 sin t t cos t , x t x * t ~ x (t ) C C cos t C C sin t t cos t sin t . 2 2 2 2 1 1 2 Если функции f i t , i 1, n , входящие в правую часть уравнений линейной неоднородной системы (2.45) равны сумме нескольких функций вида (2.46), то для отыскания частного решения такой системы используется принцип наложения решений. Поясним этот принцип на примере, когда f i t i t i t , i 1, n , где функции i t и i t , i 1, n , имеют вид (2.46). Пусть известно частное решение ~ x t , ~ x t , ..., ~ x t системы 1 2 n дифференциальных уравнений dxi ai1 x1 ai 2 x2 ain xn i t , i 1, n , dt и частное решение ~ x1 t , ~ x2 t , ..., ~ xn t системы уравнений dxi ai1 x1 ai 2 x2 ain xn i t , i 1, n , dt тогда их сумма ~ x1 t ~ x1 t , ~ x2 t ~ x2 t , ..., ~ xn t ~ xn t частным решением системы уравнений является dxi ai1 x1 ai 2 x2 ain xn i t i t , i 1, n . dt Пример 2.9. Найти решение системы дифференциальных уравнений методом подбора: dx1 t dt x1 2 x2 e , dx2 x 4 x e 2t . 1 2 dt (2.50) Решение. Заданная система (2.50) является системой линейных неоднородных дифференциальных уравнений с постоянными коэффициентами, в которых свободные члены представляют собой сумму двух функций специального вида: 81 f1 (t ) 1 t 1 t , 1 t e t , 1 t 0 e 2t , f 2 (t ) 2 t 2 t , 2 t 0 e t , 2 t e 2t . Общее решение x1 t , x2 t неоднородной системы (2.50) будет представлять собой сумму частного решения ~ x1 t , ~ x2 t этой системы и общего решения x1* t , x2* t соответствующей однородной системы dx1 dt x1 2 x 2 , dx2 x 4 x . 1 2 dt (2.51) Найдем общее решение соответствующей однородной системы (2.51) методом Эйлера. Характеристическое уравнение однородной системы (2.51) имеет вид 1 2 1 4 0, или 2 5 6 0 . Корнями этого уравнения являются 1 2 и 2 3 . Корню 2 2 будет соответствовать частное решение вида x11 t 11e 2t , x21 t 21e 2t . Определим значения 11 и 21 . Подставляя 1 2 в систему вида (2.11 ) 1 1 2 2 0, (2.52) 4 0 , 1 2 / получим систему для определения 11 и 21 : 11 2 21 0, 11 2 21 0. Умножив первое уравнение этой системы на -1, приходим к системе уравнений 11 2 21 0, 11 2 21 0, 82 которая эквивалентна одному уравнению 11 2 21 0 . Из этого уравнения получим, что 11 2 21 . Полагая, например, 11 2 , находим 21 1 . Таким образом, частное решение однородной системы (2.51) соответствующее корню 1 2 имеет вид x11 t 2e 2t , x21 t e 2t . Корню 2 3 соответствует частное решение вида x12 t 12 e 3t , x22 t 22 e 3t . Подставляя 2 3 в систему (2.52), получим систему для определения 12 и 22 : 212 2 22 0, 12 22 0, 1 Умножая первое уравнение полученной системы на , имеем систему 2 12 22 0, 12 22 0, которая эквивалентна одному уравнению 12 22 0 . Из этого уравнения следует, что 12 22 . Пусть 12 1 , тогда 22 1 . Значит, ещё одно частное решение однородной системы (2.51) будет иметь вид x12 t e 3t , x22 t e 3t . Таким образом, находим общее решение однородной системы (2.51) как линейную комбинацию её найденных частных решений: x1* t 2C1e 2t C 2 e 3t , x2* C1e 2t C 2 e 3t . Для неоднородной системы дифференциальных уравнений dx1 t dt x1 2 x2 e , dx2 x 4 x 0 e t 1 2 dt 83 (2.53) свободными членами являются функции 1 (t ) e t и 2 (t ) 0 e t . Из вида этих функций определяем, что в формуле (2.47) n 2 , p m1 m2 0 , a 1 и b 0 . Кроме того, поскольку a bi 1 не является корнем характеристического уравнения, то k 0 . Значит, частное решение неоднородной системы (2.53) имеет вид ~ x1 t Aet , ~ x2 t Met . Для неоднородной системы дифференциальных уравнений dx1 2t dt x1 2 x2 0 e , dx2 x 4 x e 2t 1 2 dt (2.54) свободными членами являются функции 1 (t ) 0 e 2t и 2 (t ) e 2t , поэтому в формуле (2.47) полагаем n 2 , p m1 m2 0 , a 2 и b 0 . Так как a bi 2 является корнем характеристического уравнения кратности 1, то считаем k 1 . Таким образом, частное решение неоднородной системы (2.54) записывается в виде ~ x1 t ( Bt C )e 2t , ~ x2 t ( Nt K )e 2t . Используя принцип наложения решений, частное решение заданной неоднородной системы (2.50) будем искать как сумму частных решений ~ x1 t , ~ x2 t и ~ x1 t , ~ x2 t : ~ x1 (t ) ~ x1 t ~ x1 t Ae t ( Bt C )e 2t , ~ x (t ) ~ x t ~ x t Met ( Nt K )e 2t . 2 2 (2.55) 2 Определим значения произвольных постоянных A, B, C , M , N , K методом неопределенных коэффициентов. Для чего подставим частное решение (2.55) в неоднородную систему (2.50), в результате получим равенства: Ae t Be 2t 2Bt C e 2t Ae t Bt C e 2t 2Met 2 Nt K e 2t e t , Me t Ne 2t 2 Nt K e 2t Ae t Bt C e 2t 4Me t 4 Nt K e 2t e 2t . Приравнивая коэффициенты при e t , e 2t и te 2t , из первого равенства имеем уравнения: 84 e t A A 2 M 1, e 2t B 2C C 2 K , te 2t 2 B B 2 N , из второго: et M A 4M , e 2t N 2 K C 4 K 1, te 2t 2 N B 4 N . В каждом из полученных алгебраических уравнений, перенося все слагаемые в одну часть уравнения и приводя подобные, приходим к системе для определения неизвестных произвольных постоянных A, B, C , M , N , K : 2 M 1 0, B C 2 K 0, B 2 N 0, A 3M 0, C N 2 K 1 0, B 2 N 0. 3 1 Решая эту систему, находим A , B 2 , C 0 , M , N 1, 2 2 K 1 и, следовательно, 3 1 ~ x1 t e t 2te 2t , ~ x2 t e t t 1e 2t . 2 2 Значит, общее решение заданной неоднородной системы дифференциальных уравнений (2.50) имеет вид: 3 x1 t x1* t ~ x1 t 2C1e t C 2 e 3t e t 2te 2t , 2 1 x2 t x2* t ~ x2 t C1 C 2 e 3t e t t 1e 2t . 2 УПРАЖНЕНИЯ 1. Методом Эйлера найти дифференциальных уравнений: 85 решения следующих систем dx1 dt 5 x1 2 x2 , а) dx2 4 x x ; 1 2 dt dx1 dx1 dt 3 x1 x2 , dt 3 x1 2 x 2 , б) dx2 в) x x , 1 2 dt dx2 x x ; 1 2 dt x1 0 1, x2 0 0; dx1 dt x1 x2 , dx2 x1 x2 x3 , г) dt dx3 dt 3 x2 x3 , x1 0 7, x2 0 2, x3 0 1; 2. Матричным методом дифференциальных уравнений: dx1 dt x2 x3 , dx д) 2 x1 x3 , dt dx3 dt x1 x2 . найти dx1 dx1 dt x1 3 x2 , dt 3 x1 2 x 2 , а) dx2 б) x 5 x , 1 2 dt dx2 4 x 7 x ; 1 2 dt x1 0 3, x2 0 1; решения следующих систем dx1 dt 4 x1 x2 , dx в) 2 3 x1 2 x2 , dt dx3 dt 2 x1 3 x2 4 x3 ; 3. Методом вариации произвольных постоянных найти решения следующих систем дифференциальных уравнений: dx1 2t dt 2 x1 x2 e , а) dx2 3 x 2 x 6e 2t ; 1 2 dt 4. Методом Даламбера дифференциальных уравнений: dx1 2 dt x2 tg t 1, б) dx2 x tgt ; 1 dt найти 86 решения следующих систем dx1 t dt 3 x1 x2 e , а) dx2 x 3 x e t ; 1 2 dt dx1 dt 2 x1 4 x2 cos t , б) dx2 x 2 x sin t ; 1 2 dt 5. Методом подбора найти дифференциальных уравнений: dx1 dt 2 x1 4 x2 4t 1, а) dx2 x x 3 t 2 ; 1 2 dt 2 dx1 t dt x1 x2 e , в) dx2 t dt x1 x2 e , x1 0 x2 0 1; решения следующих dx1 dt x2 sin t , б) dx2 x cos t ; 1 dt dx1 t dt 2 x1 x2 2e , г) dx2 x 2 x 3e 4t ; 1 2 dt Ответы: 1. а) в) x1 t C1e t C 2 e 3t , б) x2 t 2C1e t C 2 e 3t ; x1 t e 2t C1 C 2 cos t C1 C 2 sin t , x2 t e 2t C1 cos t C 2 sin t ; x1 t 5e t 2e t cos 2t e t sin 2t , г) x2 t 4e t sin 2t 2e t cos 2t , x3 t 5e t 6e t cos 2t 3e t sin 2t ; x1 t C1e 2t C2 e t , д) x2 t C1e 2t C3e t , x3 t C1e 2t C 2 e t C3e t ; 87 x1 t 1 t e 2t , x2 t te 2t ; систем 2. а) x1 t 3e 2t , x2 t e 2t ; б) x1 t e 5t C1 cos 2t C2 sin 2t , x2 t e 5t C1 C2 sin 2t C1 C 2 cos 2t ; x1 t 3C1e t C3e 5t , в) x2 t 9C1e t C3e 5t , x3 t 7C1e t C 2 e 4t 5C3e 5t ; 8 x1 t 2C1e t C 2 e t e 2t , 3 3. а) 29 x2 t 3C1e t C 2 e t e 2t ; 3 б) x1 t C1 cos t C2 sin t tgt , x2 t C1 sin t C 2 cos t 2; 1 1 x1 x2 C1e 9t e t , 8 9 4. а) t t x1 x2 C 2 e te 1; б) x1 t 3 sin t 2 cos t 2C1t C1 2C 2 , x2 t 2 sin t C1t C2 ; x1 t C1e 2t 4C 2 e 3t t t 2 , 5. а) в) б) 1 x2 t C1e 2t C2 e 3t t 2 ; 2 x1 t e t , x2 t e t ; г) x1 t C1 sin t C 2 1cos t , x2 t C1 cos t C2 sin t ; x1 t C1e t C 2 e 3t te t e 4t , x2 t C1e t C2 e 3t t 1e t 2e 4t ; 88 ГЛАВА 3. ЭЛЕМЕНТЫ ТЕОРИИ УСТОЙЧИВОСТИ §3.1. Устойчивость по Ляпунову. Основные понятия и определения При математическом описании изучаемого физического явления часто его идеализируют и упрощают, учитывая лишь самые существенные из влияющих на него факторов, и отбрасывая менее существенные из них. При этом возникает вопрос о том, насколько удачно были выбраны упрощающие предположения. Возможно, что неучтенные факторы оказывают сильное влияние на данное явление, существенно меняя не только его количественные, но и качественные характеристики. Ответ на этот вопрос, как правило, получают, сравнивая имеющиеся результаты с опытными данными. Однако во многих случаях можно указать условия, при которых некоторые упрощения заведомо недопустимы. Пусть некоторое явление описывается нормальной системой дифференциальных уравнений: dx1 dt f1 t , x1 , x2 , ..., xn , dx2 f t , x , x , ..., x , 2 1 2 n dt dxn f t , x , x , ..., x n 1 2 n dt (3.1) x1 t0 x10 , x2 t0 x20 , , xn t0 xn0 , (3.2) с начальными условиями которые, как правило, являются результатом измерений, и, следовательно, получены с некоторой погрешностью. Тогда становится закономерным вопрос о том, изменится ли существенно частное решение системы дифференциальных уравнений (3.1), полученное при начальных условиях (3.2), если изменить начальные данные t 0 , x10 , x20 , …, xn0 . Если окажется, что сколь угодно малые изменения начальных данных способны существенно изменить решение системы (3.1), то решение, полученное при неточных начальных данных, не будет иметь никакого прикладного значения, так как оно даже приближенно не будет описывать изучаемое явление. Поэтому важное значение для приложений 89 имеет задача определения условий, при которых достаточно малое изменение начальных данных приводит лишь к малому изменению решения. Решение этой проблемы привело к созданию теории устойчивости, основоположником которой является А.М. Ляпунов. Рассмотрим основные понятия этой теории. Пусть для системы дифференциальных уравнений (3.1) выполняются все условия теоремы 1.1 существования и единственности решения задачи Коши, тогда на конечном интервале t 0 h t t 0 h , h 0 , существует и притом единственное частное решение системы (3.1), удовлетворяющее заданным начальным условиям (3.2). Это частное решение обозначим 1 t , 2 t , , n t , а начальные условия (3.2), которым оно удовлетворяет, запишем в виде: 1 t 0 x10 , 2 t0 x20 , , n t 0 xn0 . Частное решение системы (3.1), полученное при каких-либо других начальных условиях, отличных от условий (3.2), обозначим x1 t , x2 t , , xn t . Предполагается, что решения x1 t , x2 t , …, xn t и 1 t , 2 t , …, n t неограниченно продолжимы вправо, то есть, определены при всех t t0 . Решение 1 t , 2 t , , n t системы (3.1) называется устойчивым по Ляпунову при t , если для любых t 0 0 и 0 можно подобрать t 0 , 0 такое, что для любого решения x1 t , x2 t , , xn t этой системы, для которого выполняются неравенства xi t0 i t0 , i 1, n , (3.5) будут справедливы неравенства xi t i t , i 1, n , (3.6) при всех t t 0 . Другими словами, решение x1 t , x2 t , , xn t системы (3.1) близкое по начальным значениям к решению 1 t , 2 t , , n t остаётся близким к нему и при t t 0 . С геометрической точки зрения, устойчивость по Ляпунову решения 1 t , 2 t , ..., n t системы (3.1) при t означает, что любое другое решение x1 t , x2 t , ..., xn t этой системы, которое в начальный момент времени t t 0 начинается в -окрестности точки x10 , x20 , ..., x n0 , никогда не покинет -окрестности решения 1 t , 2 t , ..., n t . На рис. 3.1 приведена 90 геометрическая иллюстрация случая n 2 , на котором интегральная кривая I есть график решения 1 t , 2 t , а интегральная кривая II – график решения x1 t , x2 t . Рис. 3.1 Решение 1 t , 2 t , ..., n t системы (3.1) называется неустойчивым, если существует 0 такое, что для любого 0 найдется момент времени t t1 такой, что для некоторого i k и t t1 будет иметь место xk t1 k t1 при условии, что для всех i 1, n выполняется неравенство xi t0 i t0 . С геометрической точки зрения, неустойчивость решения 1 t , 2 t , ..., n t системы (3.1) при t означает, что можно указать такое решение x1 t , x2 t , ..., xn t этой системы, которое в начальный момент времени t t 0 начинается в неравенство окрестности точки x10 , x20 , ..., x n0 и с течением времени покидает окрестность решения 1 t , 2 t , ..., n t . Решение 1 t , 2 t , ..., n t системы (3.1) называется асимптотически устойчивым, если 1) это решение устойчиво по Ляпунову при t ; 2) для любого t 0 0 существует 1 1 (t 0 ) 0 такое, что для всякого решения x1 t , x2 t , ..., xn t этой системы, для которого xi t0 i t0 1 , i 1, n , будут справедливы равенства 91 (3.8) lim xi t i t 0 , i 1, n . t (3.9) С геометрической точки зрения, асимптотическая устойчивость решения 1 t , 2 t , ..., n t системы (3.1) при t означает, что любое другое решение x1 t , x2 t , ..., xn t этой системы, которое в начальный момент времени t t 0 начинается в -окрестности точки x , x , ..., x , с течением времени не только не покинет 0 1 0 2 0 n -окрестности решения 1 t , 2 t , ..., n t , но и останется достаточно близким к нему. Пример 3.1. Исходя из определения устойчивости по Ляпунову, показать, что решение системы дифференциальных уравнений dx dt y, (3.10) dy x, dt удовлетворяющее начальным условиям x0 0, y 0 0 , (3.11) устойчиво. Решение. Общее решение системы (3.10) было найдено в §1.5 (пример 1.6) x t C1 cos t C 2 sin t , y t C1 sin t C 2 cos t . Подставляя в общее решение заданные начальные данные t 0, x0 0, y 0 0 , получим, что C1 0 и C2 0 . Следовательно, частное решение системы (3.10), соответствующее заданным начальным условиям (3.11), имеет вид: 1 t 0, 2 t 0 . Подставляя в общее решение другие начальные данные t 0 , x0 x0 , y 0 y 0 , находим C1 x0 и C 2 y0 . Значит, частное решение системы (3.10), удовлетворяющее другим начальным условиям, имеет вид: xt x0 cos t y0 sin t , y t x0 sin t y0 cos t . Возьмем произвольное 0 и покажем, что существует 0 такое, что при x0 1 0 x0 0 и y 0 2 0 y 0 0 выполняются неравенства 92 xt 1 t xt 0 x0 cos t y 0 sin t , y t 2 t y t 0 x0 sin t y 0 cos t для всех t 0 . Это и будет означать, согласно определению, что нулевое решение 1 t 0, 2 t 0 системы (3.10) устойчиво по Ляпунову. Если взять , 2 тогда при x0 и y0 будут иметь место неравенства x0 cos t y 0 sin t x0 cos t y 0 sin t x0 y0 , x0 sin t y0 cos t x0 sin t y 0 cos t x0 y 0 для всех t 0 . Таким образом, нулевое решение системы устойчиво по Ляпунову. Пример 3.2. Исходя из определения устойчивости по Ляпунову, исследовать устойчивость решений дифференциальных уравнений: dx 1 t x , x0 0 ; dt dx б) x , x0 0 . dt а) dx 1 t x является линейным dt неоднородным дифференциальным уравнением первого порядка, его общее решение определяется согласно формуле (1.26): Решение. а) уравнение xt Ce t t . Частное решение, удовлетворяющее заданному начальному условию x0 0 , имеет вид: t t . Другому начальному условию x0 x0 решение xt x0 e t t . будет соответствовать При любом 0 и 0 из выполнения условия 93 x0 0 x0 0 x0 , следует, что xt t x0 e t t t x0 e t x0 , t 0 , так как 0 e t 1 при всех t 0 . Кроме того, lim xt t lim e t x0 0 x0 0 . t t dx 1 t x является dt устойчивым по Ляпунову, а также асимптотически устойчивым. б) разделяя в заданном уравнении переменные t и x , приходим к уравнению Значит, решение t заданного уравнения dx dt . x Интегрируя это уравнение, получим ln x t C или x e t C . Значит, общее решение заданного уравнения имеет вид ~ xt Ce t , ~ где C e C . Подставляя в это равенство заданные начальные данные t 0 0 , ~ x (0) 0 , находим C 0 и соответствующее частное решение t 0 . ~ Используя другое начальное условие x0 x0 , получим C x0 и соответствующее частное решение xt x0 e t . Для любого 0 невозможно подобрать 0 такое, чтобы из выполнения условия x0 0 x0 0 x0 , 94 следовала бы справедливость неравенства xt t , t 0 , так как xt t x0 e t 0 e t x0 при t . Значит, решение t заданного уравнения dx x не является dt устойчивым по Ляпунову. Исследование устойчивости произвольного решения 1 t , 2 t , ... , n t нормальной системы дифференциальных уравнений (3.1) может быть сведено к исследованию устойчивости нулевого решения системы дифференциальных уравнений, получаемой из системы (3.1) путем замены переменных. Пусть yi xi i , i 1, n – новые неизвестные функции аргумента t , тогда подставляя xi yi i , i 1, n , в уравнения системы (3.1), получим систему дифференциальных уравнений: dy1 d1 dt dt f1 t , y1 1 , y2 2 , ..., y n n , dy 2 d 2 f t , y , y , ..., y , 2 1 1 2 2 n n dt dt dy n d n f t , y , y , ..., y . n 1 1 2 2 n n dt dt (3.14) совокупность функций 1 t , 2 t , ..., n t является di решением системы (3.1), то f i t , 1 , 2 , ..., n , i 1, n , и от системы dt (3.14) приходим к системе вида Поскольку dy 1 dt F1 t , y1 , y 2 , ..., y n , dy 2 F t , y , y , ..., y , 2 1 2 n dt dy n F t , y , y , ..., y , n 1 2 n dt где 95 (3.15) Fi t , y1 , y 2 , ..., y n f i t , y1 1 , y 2 2 , ..., y n n f i t , 1 , 2 , ..., n , i 1, n Очевидно, что система (3.15) имеет нулевое (тривиальное) решение y1 t 0, y 2 t 0, ..., y n t 0 , так как при t t 0 Fi t ,0, 0, ..., 0 f i t ,0 1 , 0 2 , ..., 0 n f i t , 1 , 2 , ..., n 0 , i 1, n . Таким образом, исследование устойчивости произвольного решения 1 t , 2 t , ..., n t системы (3.1) сводится к исследованию устойчивости нулевого решения y1 t 0, y 2 t 0, ..., y n t 0 системы (3.15). Замечание. В частности, от исследования произвольного решения 1 t , 2 t , ..., n t линейной неоднородной системы дифференциальных уравнений (2.45) можно перейти к исследованию нулевого решения соответствующей однородной системы дифференциальных уравнений (2.9). Действительно, Fi t , y1 , y 2 , ..., y n ai1 ( y1 1 ) ... ai 2 ( y 2 2 ) ... ain ( y n n ) f i (t ) ai11 ... ai 2 2 ... ain n f i (t ) ai1 y1 ... ai 2 y 2 ... ain yn , i 1, n, и полагая yi xi , i 1, n , приходим к линейной однородной системе (2.9). Нулевое решение y1 t 0, y 2 t 0, ..., y n t 0 системы (3.15) устойчиво по Ляпунову при t , если для любых t 0 0 и 0 можно подобрать t 0 , 0 такое, что для любого решения y1 t , y 2 t , , y n t этой системы, для которого выполняются неравенства yi t0 , i 1, n , будут справедливы неравенства yi t , i 1, n , (3.16) при всех t t 0 . Нулевое решение y1 t 0, y 2 t 0, ..., y n t 0 системы (3.15) неустойчиво, если существует 0 такое, что для некоторого i k и t t1 будет иметь место неравенство y k t1 при условии, что для всех i 1, n выполняется неравенство yi t0 . Нулевое решение y1 t 0, y 2 t 0, ..., y n t 0 асимптотически устойчиво, если: 1) это решение устойчиво по Ляпунову при t ; 96 системы (3.15) 2) для любого t 0 0 существует 1 1 (t 0 ) 0 такое, что для всякого решения y1 t , y 2 t , ..., y n t этой системы, для которого yi t0 1 , i 1, n , будут справедливы равенства lim yi t 0 , i 1, n . t Для произвольного решения 1 t , 2 t , ..., n t системы (3.1) и нулевого решения y1 t 0, y 2 t 0, ..., y n t 0 системы (3.15) справедливы следующие теоремы. Теорема 3.1. Решение 1 t , 2 t , ..., n t системы дифференциальных уравнений (3.1) устойчиво по Ляпунову тогда и только тогда, когда устойчиво по Ляпунову нулевое решение системы дифференциальных уравнений (3.15). Доказательство. ■ Необходимость. Пусть решение 1 t , 2 t , ..., n t , t t 0 системы дифференциальных уравнений (3.1) устойчиво по Ляпунову. Тогда для любого 0 существует 0 такое, что для любого решения x1 t , x2 t , ..., xn t , t t 0 , системы (3.1), для которого выполняются неравенства xi t0 i t 0 , i 1, n , будут справедливы неравенства xi t i t , i 1, n , при всех t t 0 . Полагая в указанных неравенствах xi t i t yi t , i 1, n , t t 0 , получим определение устойчивости по Ляпунову нулевого решения y1 t 0, y 2 t 0, ..., y n t 0 системы (3.15): для любого решения y1 t , y 2 t , ..., y n t , t t 0 системы (3.15), для которого выполняются неравенства yi t0 , i 1, n 97 будут справедливы неравенства yi t , i 1, n , при всех t t 0 . Достаточность. По условию теоремы нулевое решение y1 t 0, y 2 t 0, ..., y n t 0 системы (3.15) устойчиво. Следовательно, для любого 0 , найдется 0 такое, что для любого решения y1 t , y 2 t , ..., y n t , t t 0 системы (3.15), удовлетворяющего условиям yi t0 , i 1, n будут справедливы неравенства yi t , i 1, n при всех t t 0 . Пусть в данных неравенствах yi t xi t i t , i 1, n , где i t , i 1, n , t t 0 решение системы (3.1), удовлетворяющее заданным начальным условиям, а xi t , i 1, n , t t 0 решение этой же системы, но удовлетворяющее каким-либо другим начальным условиям. Тогда получаем определение устойчивости по Ляпунову решения 1 t , 2 t , ..., n t , t t 0 системы дифференциальных уравнений (3.1). ■ Теорема 3.2. Решение 1 t , 2 t , ..., n t системы дифференциальных уравнений (3.1) асимптотически устойчиво тогда и только тогда, когда асимптотически устойчиво нулевое решение системы дифференциальных уравнений (3.15). Из теоремы 3.1 (теоремы 3.2) и сделанного выше замечания относительно линейных неоднородных систем дифференциальных уравнений следует, что решение 1 t , 2 t , ..., n t линейной неоднородной системы дифференциальных уравнений (2.45) устойчиво по Ляпунову (асимптотически устойчиво) тогда и только тогда, когда устойчиво по Ляпунову (асимптотически устойчиво) нулевое решение 98 соответствующей линейной однородной системы дифференциальных уравнений (2.9). В n -мерном фазовом пространстве переменных y1 , y 2 , ..., y n тривиальное решение системы (3.15) интерпретируется как точка покоя y1 0, y 2 0, ..., y n 0 , расположенная в начале координат этого пространства. Сформулируем определения устойчивости и неустойчивости для точки покоя y1 0, y 2 0, ..., y n 0 . Точка покоя y1 0, y 2 0, ..., y n 0 системы (3.15) называется устойчивой по Ляпунову, если фазовая точка ( y1 , y 2 ,..., yn ) двигаясь по любой фазовой траектории системы (3.15), начинающейся в точке M 0 y1 t 0 , y 2 t 0 ,..., yn (t 0 ) некоторой -окрестности начала координат, с течением времени при t t 0 не выходит за пределы произвольной окрестности начала координат. Устойчивость по Ляпунову точки покоя, расположенной в начале координат в случае n 2 имеет наглядную геометрическую интерпретацию на фазовой плоскости Oy1 y 2 , представленную на рис. 3.2. Точка покоя y1 0, y 2 0, ..., y n 0 системы (3.15) называется неустойчивой, если найдется такая фазовая траектория системы (3.15), начинающаяся в точке M 0 y1 t 0 , y 2 t 0 ,..., yn (t 0 ) некоторой окрестности начала координат, что фазовая точка ( y1 , y 2 ,..., yn ) двигаясь по этой траектории в некоторый момент времени t ( t t 0 ) покидает произвольную -окрестность начала координат. Рис. 3.2 Точка покоя y1 0, y 2 0, ..., y n 0 системы (3.15) называется асимптотически устойчивой, если она устойчива по Ляпунову и, кроме того, фазовая точка ( y1 , y 2 ,..., yn ) двигаясь по любой фазовой траектории 99 системы (3.15), начинающейся в точке M 0 y1 t 0 , y 2 t 0 ,..., yn (t 0 ) некоторой 1 -окрестности начала координат, при неограниченном росте времени t , t t 0 будет бесконечно приближаться к началу координат. §3.2. Основные типы точек покоя линейных однородных систем дифференциальных уравнений и их устойчивость Рассмотрим систему линейных однородных дифференциальных уравнений с постоянными коэффициентами (2.9) при n 2 : dx1 dt a11 x1 a12 x2 , dx 2 a x a x , 21 1 22 2 dt (3.17) где a11 a 21 a12 0. a 22 (3.18) Система (3.17) имеет точку покоя x1 0 , x2 0 , расположенную в начале координат фазовой плоскости Ox1 x2 . Характер расположения фазовых траекторий системы (3.17) вблизи точки покоя x1 0 , x2 0 , и, следовательно, устойчивость точки покоя, зависят от того, какие значения принимают корни 1 и 2 характеристического уравнения этой системы: a11 a12 0, a 21 a 22 или 2 a11 a22 a11a22 a12 a21 0 . (3.19) Рассмотрим возможные случаи расположения фазовых траекторий системы (3.17) вблизи её точки покоя x1 0 , x2 0 . Случай 1. Корни 1 и 2 характеристического уравнения (3.19) системы (3.17) действительные и различные, причем в силу условия (3.18) 1, 2 0 . В этом случае общее решение системы (3.17), найденное, например, методом Эйлера, будет иметь вид: x1 t C111e 1t C2 12 e 2t , x2 t C1 21e 1t C 2 22 e 2t . 100 (3.20) а) Пусть 1 0 и 2 0 . При C2 0 общее решение (3.20) принимает вид x1 t C111e 1t , x2 t C1 21e 1t . (3.21) Исключая из функций x1 t и x2 t (3.21) переменную t , получаем уравнение прямой I (рис. 3.3) x2 21 x1 . 11 Фазовыми траекториями системы (3.17) являются сама точка покоя x1 0 , x2 0 и две полупрямые, на которые начало координат 0, 0 делит эту прямую. Движение фазовой точки x1 , x2 по фазовым траекториям с ростом t происходит в направлении к началу координат 0, 0 , так как e 1t 0 при 1 0 и t . Аналогично, при C1 0 имеем x1 t C 2 12 e 2t , x2 t C 2 22 e 2t . (3.22) В этом случае получаем еще две фазовые траектории, которыми являются две полупрямые, получаемые из прямой II x2 22 x1 12 соответственно при x1 0 и x1 0 . Движение по этим полупрямым осуществляется к началу координат 0, 0 , так как e 2t 0 при 2 0 и t . Пусть C1 0 , C2 0 и 1 2 . Тогда dx 2 C11 21e 1t C2 2 22 e 2t dt lim lim t dx t C e 1t C e 2t dt 1 1 1 11 2 2 12 e 2t C11 21e 1 2 t C 2 2 22 lim t t e 2 C e 1 2 t C 1 1 11 2 2 12 C11 21e 1 2 t C2 2 22 22 lim , t C e 1 2 t C 12 1 1 11 2 2 12 101 и, следовательно, e 1 2 t 0 при t . Полученное равенство означает, что все остальные фазовые траектории системы (3.17) при подходе к началу координат 0, 0 фазовой плоскости Ox1 x2 с ростом t имеют общую касательную прямую с 22 угловым коэффициентом : 12 x2 22 x1 (прямая II). 12 Рис. 3.3 Схематически поведение фазовых траекторий около точки покоя показано на рис. 3.3. Точка покоя x1 0 , x2 0 в рассматриваемом случае является асимптотически устойчивой, так как x1 t 0 и x2 t 0 при t , и называется устойчивым узлом. б) Пусть 1 0, 2 0 . Тогда расположение траекторий вблизи точки покоя x1 0 , x2 0 такое же, как и в предыдущем случае, но фазовые точки движутся по фазовым траекториям системы (3.17) при t в противоположном направлении – от начала координат 0, 0 фазовой плоскости Ox1 x2 (рис. 3.4). Точка покоя x1 0 , x2 0 неустойчива, так как x1 t и x2 t при и называется t , неустойчивым узлом. в) Пусть 1 0, 2 0 . Проводя рассуждения, аналогичные случаю а) приходим к следующим результатам. Если C2 0 , то движение по прямой I так как 1 2 0 при 1 2 x2 21 x1 осуществляется от 11 начала координат 0, 0 фазовой Рис. 3.4 плоскости Ox1 x2 , поскольку значение множителя e 1t , входящего в выражения для x1 t и x2 t (3.22), бесконечно возрастает при 102 t и 1 0 . Если C1 0 , то движение по прямой II x2 22 x1 12 направлено к началу координат 0, 0 , так как в равенствах (3.22) множитель e 2t 0 при 2 0 и t . Причем, если C1 0, C2 0 , то прямая I является асимптотой при t для всех траекторий, за исключением двух полупрямых с угловым коэффициентом равным 22 , 12 составляющих прямую II. Подобное утверждение будет справедливо и для прямой II при t . Вид фазовых траекторий системы схематично изображен на рис. 3.5. Точка покоя x1 0 , x2 0 , в данном случае, является неустойчивой и называется седлом, а прямые I и II – сепаратрисами. Случай 2. Корни характеристического уравнения (3.19) комплексные: 1, 2 a ib , b 0 . В этом случае, найденное методом Эйлера общее решение системы (3.17) будет иметь вид: x1 t e at C111 cos bt C2 11 sin bt , , (3.23) x2 t e at C1 21 cos bt C 2 21 sin bt , где C1 и C2 – произвольные постоянные. Рассмотрим возможные случаи расположения фазовых траекторий системы (3.17) около начала координат 0, 0 фазовой плоскости Ox1 x2 в зависимости от значений действительной части a Re 1,2 комплексносопряженных корней характеристического уравнения (3.19). Пусть a 0 , тогда в а) выражениях x1 t и x2 t (3.23) множитель e at , будет стремиться к нулю при Кроме того, t . наличие в этих выражениях ограниченных периодических функций cos bt и sin bt , приводит к тому, что фазовые траектории системы (3.17) будут представлять собой спирали, движение по которым с ростом t будет происходить к началу координат Рис. 3.5 0, 0 фазовой плоскости Ox1 x2 . 103 Здесь точка покоя x1 0, x2 0 асимптотически устойчива и называется устойчивым фокусом (рис. 3.6). б) Пусть a 0 , тогда траектории системы (3.17) будут отличаться от траекторий, полученных при a 0 , только направлением движения. При a 0 движение фазовой точки ( x1, x2 ) по фазовым траекториям системы (3.17) при будет t осуществляться от начала координат 0, 0 . Точка покоя x1 0, x2 0 в этом случае неустойчива и называется неустойчивым фокусом. в) Пусть a 0 , то есть корни характеристического уравнения (3.19) чисто мнимые 1, 2 ib , b 0 , тогда Рис. 3.6 решение (3.23) примет вид: x1 t C111 cos bt C 2 11 sin bt , x2 t C1 21 cos bt C 2 21 sin bt. (3.24) Фазовые траектории системы (3.17) в этом случае представляют собой замкнутые кривые, содержащие внутри себя точку покоя x1 0, x2 0 (см. пример 1.6). Такую точку покоя называют центром (рис. 3.7). Центр является устойчивой, но не асимптотически устойчивой точкой покоя, так как функции x1 t и x2 t (3.24) не стремятся к нулю при t . Рис. 3.7 Случай 3. Корни характеристического уравнения (3.19) кратные: 1 2 . В этом случае общее решение системы (3.17), найденное методом Эйлера, имеет вид: x1 t C111 t e t C 2 11 t e t , x2 t C1 21 t e t C2 21 t e t , , где ij t , i, j 1, 2 – многочлены степени не выше первой. В общем случае равенства (3.25) могут быть записаны иначе: 104 (3.25) x1 t At B e t , x2 t Ct D e t , (3.26) где величины A, B, C и D являются линейными комбинациями произвольных постоянных С1 и С2. Возможны следующие случаи расположения фазовых траекторий вблизи начала координат в зависимости от значения . а) Пусть 0 , тогда множители e t и te t , входящие в функции x1 t и x2 t (3.26), стремятся к нулю при t . Поэтому, движение по фазовым траекториям направлено к началу координат 0, 0 фазовой плоскости Ox1 x2 . Фазовые траектории системы (3.17) при t будут касаться лишь одной прямой в отличие от случая, когда 1 2 (рис. 3.8). Точка покоя x1 0, x2 0 системы (3.17) в рассматриваемом случае асимптотически устойчива и называется устойчивым вырожденным узлом. б) Пусть 0 . Заменив в предыдущих рассуждениях t на –t, получим тот же вид фазовых траекторий, но движения фазовой точки по ним при t будет происходить уже в противоположном направлении – Рис. 3.8 от начала координат 0, 0 фазовой плоскости Ox1 x2 . Точка покоя x1 0, x2 0 в данном случае неустойчива и называется неустойчивым вырожденным узлом. Замечание. Если система (3.17) имеет вид dx1 dt kx1 , dx2 kx , 2 dt то её общим решением является совокупность функций x1 t C1e kt , x2 t C2 e kt . 105 Исключив из функций x1 (t ) и x2 (t ) независимую переменную t , получим C x2 Cx1 , где C 1 , C 2 0 . Следовательно, фазовыми траекториями C2 рассматриваемой системы будут являться полупрямые, на которые начало координат 0, 0 делит прямые x2 Cx1 , полученные при различных значениях С. В этом случае точка покоя x1 0 , x2 0 называется дикритическим узлом. Различают устойчивый и неустойчивый дикритический узел, в зависимости от того в каком направлении происходит движение по фазовым траекториям при t – к началу координат (при k 0 ), или от начала координат (при k 0 ). Устойчивый дикритический узел изображен на рис. 3.9. Для удобства все рассмотренные типы точек покоя приведены в табл. 1 приложения. Пример 3.3. Определить тип точки покоя x1 0 , x2 0 и характер поведения фазовых траекторий систем линейных однородных дифференциальных уравнений (сделать чертеж): dx dt 3 x y, а) dy x 3 y. dt Рис. 3.9 dx dt 2 y, б) dy 2 x 3 y. dt dx dt 2 x y, в) dy x 2 y. dt Решение. а) Характеристическое уравнение заданной системы имеет вид 3 1 1 3 0 или 2 6 8 0 . Корнями характеристического уравнения являются 1 4 и 2 2 . 106 Так как корни действительные и отрицательные, то начало координат 0, 0 фазовой плоскости Oxy является асимптотически устойчивой точкой покоя типа узел (см. табл. 1 приложения). Для того чтобы построить фазовые траектории заданной системы найдем ее решение методом Эйлера. Корню 1 4 соответствует частное решение x1 t 11e 4t , y1 t 21e 4t , где 11 и 21 определяются из системы 11 21 0, 11 21 0. Из системы находим 11 21 и, полагая, например, 21 1 , получаем 11 1 . Следовательно, первое частное решение имеет вид x1 t e 4 t , y1 t e 4 t . Корню 2 будет соответствовать решение x 2 t 12 e 2t , y 2 t 22 e 2t , где неизвестные постоянные 12 и 22 определяются из системы 12 22 0, 12 22 0, которая эквивалентна одному уравнению 12 22 0 . Таким образом, 12 22 и если 12 1 , то 22 1 . Значит, второе частное решение имеет вид x 2 t e 2t , y 2 t e 2t . Записываем общее решение системы 107 xt C1e 4t C 2 e 2t , y t C1e 4t C 2 e 2t . (3.27) Полагая в общем решении (3.27) C 2 0 , получим xt C1e 4t , y t C1e 4t . (3.28) y 1 , x или y x . Следовательно, фазовыми траекториями заданной системы являются две полупрямые, определяемые из прямой y x при x 0 и при x 0 . Движение фазовой точки (x, y) по этим полупрямым осуществляется к началу координат 0, 0 , так как в функции (3.28) входит Исключая из функций x(t ) и y (t ) (3.28) переменную t , находим множитель e 4t 0 при t . Полагая в общем решении (3.27) C1 0 , имеем xt C2 e 2t , y t C 2 e 2t . (3.29) y 1 или y x . x Значит, фазовыми траекториями заданной системы являются также две полупрямые, на которые точка покоя 0, 0 делит прямую y x . Фазовая точка (x, y) движется по этим полупрямым по направлению к точке 0, 0 , Исключая переменную t из функций (3.29), получим поскольку в функциях (3.29) множитель e 2t 0 при t . Если C1 0 и C2 0 , то фазовые траектории заданной системы будут представлять собой кривые, которые при приближении к точке покоя (0, 0) с ростом времени t будут иметь общую касательную прямую y 22 x , то есть 12 прямую y x , поскольку 1 2 . Для построения этих кривых может быть использован метод изоклин. Схематично картина поведения Рис. 3.10 фазовых траекторий заданной системы представлена на рис. 3.10. 108 б) Характеристическое уравнение заданной системы имеет вид: 2 2 3 0 или 2 3 4 0 . Корни 1 1 и 2 4 характеристического уравнения действительные и имеют разные знаки, следовательно, точка покоя x 0 , y 0 – седло, которое является неустойчивой точкой покоя (см. табл. 1 приложения). Построим фазовые траектории заданной линейной однородной системы. Общее решение заданной системы, найденное методом Эйлера (см. п. 2.2.1), имеет вид: xt 2C1e t C 2 e 4t , y t C1e t 2C 2 e 4t . (3.30) Пусть в общем решении (3.30) C2 0 , тогда имеем xt 2C1e t , y t C1e t . (3.31) Исключив из функций x(t ) и y (t ) (3.31) переменную t , получим x уравнение прямой y . Две полупрямые, на которые делит начало 2 координат (0,0) эту прямую, являются фазовыми траекториями заданной системы. Движение фазовой точки x, y по этим полупрямым будет осуществляться по направлению к началу координат (0,0) , так как в функциях (3.31) множитель e t 0 при t . Пусть в общем решении (3.30) C1 0 , тогда имеем xt C 2 e 4t , y t 2C2 e 4t . (3.32) Исключая из функций x(t ) и y (t ) (3.32) переменную t , приходим к уравнению прямой y 2 x . Следовательно, фазовыми траекториями будут еще две полупрямые, которые получаются из прямой y 2 x при x 0 и при x 0 . Движение фазовых точек x, y по этим полупрямым с ростом t происходит в направлении от точки покоя (0,0) , поскольку в функциях (3.32) множитель e 4t при t . 109 x и y 2 x являются сепаратрисами седла и 2 представляют собой асимптоты для всех остальных фазовых траекторий заданной системы (рис. 3.11). в) Характеристическое уравнение системы 2 4 5 0 имеет корни 1, 2 2 i . Вещественные части корней характеристического уравнения отрицательны, следовательно, точка покоя x 0 , y 0 системы асимптотически устойчива и является устойчивым фокусом (см. табл. 1 приложения). Чтобы изобразить фазовые траектории, перейдем к полярной Рис. 3.11 системе координат. Положив в уравнениях заданной системы x r cos , y r sin , получим: Прямые y d dr cos r sin 2r cos r sin , dt dt dr sin r cos d r cos 2r sin . dt dt (3.33) dr d и . Для dt dt этого умножим первое уравнение системы на cos , а второе уравнение на sin , и сложим полученные при этом уравнения. В результате, имеем dr уравнение 2r . Наоборот, умножая первое уравнение системы на dt sin , а второе уравнение на cos , и вычитая получаемые при этом d уравнения, приходим к уравнению 1 . Таким образом, система (3.33), dt dr d разрешенная относительно и , имеет вид: dt dt Разрешим систему (3.33) относительно производных 110 dr dt 2r , d 1. dt Исключив t из уравнений последней системы, получим уравнение dr 2 r . d Интегрируя это уравнение, находим ~ ~ ln r 2 C r C e 2 , C 0 ~ Одна из траекторий C 0 есть начало ~ координат 0, 0 , а остальные C 0 логарифмические спирали (рис. 3.12). Направление движения по этим спиралям указано стрелкой – фазовая точка x, y со временем t по спирали как угодно близко приближается к началу координат. Пример 3.4. Определить тип точки покоя системы дифференциальных уравнений (пример 1.5) dy dt v, dv k 2 y 2nv, dt Рис. 3.12 описывающей упругие колебания груза, учитывая сопротивление среды n 0 . Решение. Характеристическое уравнение имеет вид: k 2 1 2n 0 или 2 2n k 2 0 . Корни характеристического уравнения определяются по формулам 111 1, 2 n n 2 k 2 . Возможны следующие случаи: 1) n 0 (сопротивление среды отсутствует). В этом случае 1, 2 ki и, следовательно, точка покоя y 0, v 0 является устойчивой точкой покоя типа центр; 2) n 0 , n 2 k 2 0 (сопротивление среды мало). Корни 1 и 2 – комплексно-сопряженные и имеют отрицательные действительные части. Точка покоя y 0, v 0 асимптотически устойчива и представляет собой устойчивый фокус; 3) n 0 , n 2 k 2 0 (сопротивление среды велико). Корни 1 и 2 – действительные и принимают отрицательные значения. Значит, точка покоя y 0, v 0 асимптотически устойчива и является устойчивым узлом. Для системы (2.9), состоящей из n , n 2 , линейных однородных дифференциальных уравнений с постоянными коэффициентами характер поведения фазовых траекторий вблизи точки покоя x1 0, x2 0, ..., xn 0 , расположенной в начале координат n -мерного фазового пространства, будет таким же, как и в случае n 2 . При этом справедлива следующая теорема. Теорема 3.3. Если все корни характеристического уравнения (2.12) системы n линейных однородных дифференциальных уравнений с постоянными коэффициентами (2.9) имеют отрицательную действительную часть, то точка покоя x1 0 , x 2 0 , …, x n 0 этой системы асимптотически устойчива. Если хотя бы один корень характеристического уравнения (2.12) имеет положительную действительную часть, то точка покоя неустойчива. Пример 3.5. Исследовать на устойчивость точку покоя x 0, y 0, z 0 следующих систем дифференциальных уравнений. dx dt 2 x y, dy а) x 2 y, dt dz dt x 3 y z , dx dt x, dy б) 2 x y , dt dz dt x y z. 112 Решение. системы: а) Составляем характеристическое уравнение заданной 2 1 0 1 2 0 1 3 1 0, 1 2 2 1 0 , 1 2 4 3 0 . Корни этого уравнения 1 1 , 2 2 i , 3 2 i имеют отрицательные действительные части, следовательно, согласно теореме 3.3 система асимптотически устойчива. б) Характеристическое уравнение заданной системы имеет вид 1 0 0 2 1 0 1 1 1 0, или 1 1 2 0 . Один из корней 1 1 полученного характеристического уравнения действительный и положительный, а два других 2 и 3 действительные и отрицательные, следовательно, точка покоя x 0, y 0, z 0 заданной системы неустойчива. §3.3. Критерий Гурвица В предыдущем пункте вопрос об асимптотической устойчивости точки покоя x1 0 , x 2 0 , …, x n 0 системы n линейных однородных дифференциальных уравнений с постоянными коэффициентами (2.9) был сведен к исследованию знаков действительных частей корней ее характеристического уравнения (2.12) (теорема 3.3). Если характеристическое уравнение имеет высокую степень, то его решение представляет значительные трудности. В этом случае большое значение приобретают условия, позволяющие, не решая 113 характеристического уравнения, установить, будут ли все его корни иметь отрицательную вещественную часть или нет. Теорема 3.4. (Гурвица). Для того чтобы, действительные части всех корней уравнения n a1n1 an1 an 0 (3.34) были отрицательны, необходимо и достаточно, чтобы последовательные главные диагональные миноры матрицы Гурвица 0 0 a1 1 a3 a 2 a1 1 a a a a 4 3 2 5 a7 a6 a5 a 4 ... ... ... ... 0 0 0 0 все ... 0 ... 0 ... ... ... ... ... ... ... a n были положительны, то есть a1 1 a1 1 1 a1 0 , 2 0 , 3 a3 a2 a3 a 2 a5 a4 a1 1 a3 a 2 …, n a5 ... 0 0 a1 0 a1 0 , … a3 ... 0 ... ... a 4 a3 ... ... a n n 1 0 . ... ... ... ... 0 0 ... an Замечание. Матрица Гурвица строится следующим образом: по главной диагонали откладываются коэффициенты 1, a1 , a2 ,...., a n многочлена, стоящего в правой части уравнения (3.34). Вправо по строке от этих элементов расположены коэффициенты этого многочлена с убывающими номерами, влево – с возрастающими. При этом полагается ai 0 , если i 0 или i n . Применим теорему Гурвица к уравнениям второго, третьего и четвертого порядков. 114 1. Для уравнения 2 a1 a2 0 матрица Гурвица имеет вид a1 1 . 0 a 2 Последовательные главные диагональные миноры этой матрицы 1 a1 и 2 a1a 2 будут положительны, если а1>0 и а2>0. Последние неравенства в пространстве коэффициентов a1 и a 2 определяют первую четверть. На рис 3.13 изображена область асимптотической устойчивости тривиального решения системы дифференциальных уравнений, для которой выполняются условия теоремы 3.4 и характеристическим уравнением которой является уравнение 2 a1 a2 0 . Рис. 3.13 2. Для уравнения 3 a12 a2 a3 0 матрица Гурвица имеет вид: a1 1 a3 a 2 0 0 0 a1 . a3 Последовательными главными диагональными минорами матрицы Гурвица являются 1 a1 , a 1 2 1 a1a 2 a3 , a3 a 2 a1 1 a3 a1a 2 a3 . a3 a 2 Если a1 0 , a1a2 a3 0 и a3 0 , то 1 0 , 2 0 и 3 0 . Область асимптотической устойчивости, в пространстве коэффициентов a1 , a 2 и a3 , изображена на рис. 3.14. 3 a3 3. Для уравнения 4 3 2 a1 a2 a3 a4 0 Рис. 3.14 115 матрица Гурвица записывается следующим образом: a1 1 a3 a2 0 a 4 0 0 0 0 a1 1 . a3 a 2 0 a 4 Последовательные главные диагональные миноры этой матрицы 1 a1 , a 1 2 1 a1a 2 a3 , a3 a 2 a1 1 0 3 a3 a2 a1 a3a1a2 a3 a4a12 , 4 a4 3 будут положительны, если 0 a4 a3 a1 0 , a1a2 a3 0 , a3 a1a2 a3 a 4 a12 0 и a4 0 . Для рассмотренных уравнений условия Гурвица удобны и легко проверяются, однако с возрастанием порядка уравнения (3.34) условия Гурвица быстро усложняются. Пример 3.6. Исследовать устойчивость точки покоя x 0 , y 0 , z 0 следующих систем дифференциальных уравнений dx dt x 2 y z, dy а) 2 x y 2 z , dt dz dt x 2 y 5 z , dx dt x y , dy б) y z , dt dz dt x z. Решение. а) Характеристическое уравнение соответствующее данной системе имеет вид: 1 2 1 2 1 2 1 2 0 5 или 3 72 20 30 0 . Составим матрицу Гурвица для полинома стоящего в левой части характеристического уравнения: 116 7 1 0 30 20 7 . 0 0 30 Все последовательные главные диагональные миноры матрицы положительны: 1 7 0 , 2 7 1 7 1 30 20 140 30 110 0 , 0 3 30 20 7 30140 30 3300 0 . 0 0 30 Значит, по теореме Гурвица действительные части всех корней характеристического уравнения отрицательны и, следовательно, точка покоя x 0 , y 0 , z 0 заданной системы дифференциальных уравнений асимптотически устойчива. б) Характеристическое уравнение этой системы 1 0 0 1 0 0 1 или 3 32 3 1 2 0 . Матрица Гурвица имеет вид: 1 0 3 2 1 3 3 . 0 0 1 2 Последовательные главные диагональные миноры матрицы 1 3 0 , 2 9 1 2 , 3 2 1 2 Рис. 3.15 будут положительны, если выполняются неравенства 9 1 2 0, 1 2 0, 117 или 8 , 2 1 . 2 На рис. 3.15 схематично изображена область асимптотической устойчивости решений в плоскости параметров , . §3.4. Метод функций Ляпунова Метод функций Ляпунова состоит в исследовании устойчивости точки покоя системы дифференциальных уравнений с помощью подходящим образом подобранной функции vt , x1 , x2 , ..., xn – функции Ляпунова. Преимущество этого метода состоит в том, что выбор функции Ляпунова осуществляется без предварительного построения решения системы дифференциальных уравнений. Рассмотрим основную идею метода функций Ляпунова на примере нормальной системы дифференциальных уравнений, правые части которых не зависят явно от переменной t : dx1 dt f1 x1 , x2 , ..., xn , dx2 f x , x , ..., x , 2 1 2 n dt dxn f x , x , ..., x . n 1 2 n dt (3.35) Система вида (3.35) называется автономной нормальной системой дифференциальных уравнений. Совокупность функций x1 t a1 , x2 t a 2 , …, xn t a n , где ai , i 1, n – постоянные величины, является решением системы (3.35), если выполняются условия f i a1 , a 2 , ..., an 0 , i 1, n . Пусть для правых частей уравнений системы (3.35) справедливы равенства 118 f i 0, 0, ..., 0 0 , тогда система (3.35) имеет нулевое решение x1 t 0, x2 t 0, ..., xn t 0 , которому в фазовом пространстве соответствует точка покоя, расположенная в начале координат фазового пространства. Требуется исследовать устойчивость точки покоя x1 0, x2 0, ..., xn 0 . Если бы с возрастанием времени t движение точки по фазовым траекториям происходило бы по направлению к началу координат или хотя бы около начала координат, то рассматриваемая точка покоя была бы устойчивой. Действительно, если – расстояние от точки траектории xi xi t , i 1, n , до начала координат n xi2 t , i 1 то d n dxi dt i 1 xi dt или d n f i x1 , x2 , ..., xn . dt i 1 xi Правая часть последнего уравнения есть известная функция от d x1 , x2 , ..., xn , и можно исследовать ее знак. Если окажется, что 0 , то dt точки на всех траекториях не удаляются от начала координат при возрастании t , и точка покоя xi 0 , i 1, 2, ..., n , устойчива, причем точка покоя может быть устойчивой и при немонотонном приближении к ней с возрастанием t точек траекторий, например, в случае, когда траектории – эллипсы. Поэтому А.М. Ляпунов вместо функции рассматривал функции v x1 , x2 , ..., xn , являющиеся в некотором смысле «обобщенным расстоянием» от начала координат. Теорема 3.5 (Ляпунова об устойчивости). Если существует непрерывно дифференцируемая по всем своим аргументам функция v x1 , x2 , ..., xn , удовлетворяющая в некоторой окрестности начала координат следующим условиям: 1) v x1 , x2 , ..., xn 0 , причем v x1 , x2 , ..., x n 0 лишь при x1 x2 ... xn 0 ; 119 dv n v 2) f i x1 , x 2 , ..., xn 0 , dt i 1 xi то точка покоя x1 0, x2 0, ..., xn 0 автономной системы (3.35) устойчива. Доказательство. ■ Докажем теорему для случая n 2 , предполагая, что график функции Ляпунова v v x1 , x2 представляет собой обобщенный параболоид, а линии уровня этой функции v x1 , x2 c , с – постоянная величина, являются замкнутыми линиями. Из первого условия теоремы следует, что для функции v x1 , x2 в некоторой окрестности, за исключением самой точки 0, 0 выполняется неравенство v x1 , x2 v0, 0 . Рис. 3.16 Значит точка покоя x1 0, x2 0 автономной системы (3.12) есть точка строгого локального минимума функции v x1 , x2 и она лежит внутри замкнутых линий уровня v x1 , x2 ci , i 1, 2, 3, ... (рис. 3.16). Если c1 c2 , то линия уровня v x1 , x2 c1 целиком лежит внутри области, ограниченной линией v x1 , x2 c2 . Зададим число 0 . При достаточно малом c 0 линия уровня v x1 , x2 c целиком лежит в окрестности начала координат, но проходит через начало. Следовательно, можно выбрать 0 такое, что окрестность начала координат целиком лежит внутри области. ограниченной линией v x1 , x2 c , причем в этой окрестности v x1 , x2 c (рис. 3.17). Рассмотрим траекторию автономной системы (3.35), выходящую в наРис. 3.17 чальный момент времени t t 0 из какой120 нибудь точки M 0 x1 t 0 , x2 t 0 в -окрестности начала координат. Эта траектория при возрастании t никогда не пересечет ни одной из линий v x1 , x2 изнутри наружу. В самом деле, если бы такое пересечение было возможным в какой-нибудь точке, то в этой точке или в ее окрестности функция v x1 t , x2 t необходимо имела бы положительную произdv водную , так как при переходе от какой-нибудь линии v c к другой dt линии этого семейства, охватывающей первую, функция v x1 , x2 возрасdv тает. Но это невозможно в силу того, что по условию 0 . Значит, если dt в начальный момент времени какая-нибудь траектория находилась внутри области, ограниченной линией v c , то она и в дальнейшем будет все время оставаться внутри этой области. Отсюда следует, что для всякого 0 существует 0 такое, что любая траектория системы, выходящая в начальный момент времени t t 0 из -окрестности начала координат, для всех t t 0 будет содержаться в -окрестности начала. Это и означает устойчивость точки покоя x1 0, x2 0 , системы (3.35) при n 2 . ■ Теорема 3.6. (Ляпунова об асимптотической устойчивости). Если существует непрерывно дифференцируемая по всем своим аргументам функция v x1 , x2 , ..., xn , удовлетворяющая в некоторой окрестности начала координат условиям: 1) v x1 , x2 , ..., xn 0 , причем v x1 , x2 , ..., x n 0 лишь при x1 x2 ... xn 0 ; dv dv n v 2) f i x1 , x 2 , ..., xn 0 , причем 0 лишь при dt i 1 xi dt x1 x2 ... xn 0 , тогда точка покоя x1 0, x2 0, ..., xn 0 автономной системы (3.35) асимптотически устойчива. Теорема 3.7. (Ляпунова, о неустойчивости). Если существует непрерывно дифференцируемая по всем своим аргументам функция v x1 , x2 , ..., xn , удовлетворяющая в некоторой окрестности начала координат условиям: 1) v0, 0, ..., 0 0 и сколь угодно близко от начала координат имеются точки x1 , x2 , ..., xn , в которых v x1 , x2 , ..., x n 0 ; 2) dv n v f i x1 , x 2 , ..., xn 0 , dt i 1 xi 121 причем dv 0 dt лишь при x1 x2 ... xn 0 , тогда точка покоя автономной системы (3.35) неустойчива. Пример 3.7. Исследовать устойчивость точки покоя x 0, y 0 систем дифференциальных уравнений: dx dx dx 3 y , y x , dt dt dt x, а) б) в) dy dy 3 x; x y ; dy y. dt dt dt Решение. а) Учитывая доказательство теоремы 3.5, выберем в качестве функции Ляпунова v x, y функцию, график которой есть эллиптический параболоид: v x, y x 2 y 2 . Функция v( x, y ) x 2 y 2 0 при всех x, y R и v( x, y ) x 2 y 2 0 только при x y 0 . В силу заданной системы найдем производную по времени dv v dx v dy 2 xy 2 xy 0 . dt x dt y dt Из теоремы 3.5 следует, что точка покоя x 0, y 0 системы устойчива (центр). Асимптотической устойчивости нет, так как траектории системы есть окружности (см. пример 1.6); б) Выбирая v x, y x 2 y 2 , найдем dv 2 x y x 3 2 y x y 3 2 x 4 y 4 . dt dv dv Очевидно, что 0 при всех x, y R , причем 0 лишь при dt dt x y 0 . Таким образом, в силу теоремы 3.6, точка покоя x 0, y 0 заданной системы асимптотически устойчива; в) В качестве функции Ляпунова v x, y возьмем функцию, график которой представляет собой гиперболический параболоид: v x, y x 2 y 2 . 122 Для нее производная по времени в силу заданной системы dv v dx v dy 2 x2 y2 0 dt x dt y dt dv 0 лишь при x y 0 . Так как сколь угодно близко к началу коорdt динат найдутся точки, в которых v 0 (например, v x 2 0 вдоль прямой y 0 ), то выполнены все условия теоремы 3.7 и точка покоя x 0, y 0 системы неустойчива (седло). Недостаток же метода функций Ляпунова состоит в том, что не существует достаточно общего конструктивного способа построения функций Ляпунова. В простейших случаях функцию Ляпунова можно искать в виде и v x, y ax 2 by 2 , v x, y ax 4 by 4 , v x, y ax 4 by 2 , v x, y ax 2 by 4 a 0 , b 0 , путем соответствующего выбора значений постоянных a и b . Пример 3.8. С помощью функций Ляпунова исследовать устойчивость точки покоя x 0, y 0 следующей системы дифференциальных уравнений: dx 3 dt 3 y 2 x , dy 2 x 3 y 3 . dt Решение. Будем искать функцию Ляпунова в виде v x, y ax 2 by 2 , где a и b – произвольные положительные постоянные. Отметим, что v x, y ax 2 by 2 0 при x, y R и a 0, b 0 , и v x, y 0 лишь при x 0, y 0 . Найдем производную функции v в силу заданной системы dv v v 3 y 2x3 2x 3y3 dt x y 2ax 3 y 2 x 3 2by 2 x 3 y 3 6axy 4ax 4 4bxy 6by 4 123 4b 6a xy 4ax 4 6by 4 . 3 dv Пусть 4b 6a 0 , то есть b a , тогда 4ax 4 6by 4 0 , при 2 dt dv x, y R и a 0, b 0 . Причем 0 лишь при x y 0 . dt Если положить, например, a 2 , тогда b 3 , и функция Ляпунова v x, y 2 x 2 3 y 2 удовлетворяет всем условиям теоремы 3.6. Следовательно, точка покоя x 0, y 0 заданной системы дифференциальных уравнений асимптотически устойчива. Заметим, что если бы функцию Ляпунова не удалось бы найти в виде v x, y ax 2 by 2 , то ее следовало бы попробовать поискать в другом виде. §3.5. Устойчивость по первому приближению Рассмотрим автономную систему дифференциальных уравнений (3.35). Пусть эта система имеет точку покоя x1 0, x2 0, ..., xn 0 , расположенную в начале координат фазового пространства. Пусть также функции f i x1 , x2 , ..., xn , i 1, n , в правых частях системы (3.35) дифференцируемы в окрестности начала координат достаточное число раз. Тогда применяя формулу Тейлора, разложим функции f i x1 , x2 , ..., xn , i 1, n , по степеням x1 , x2 , ..., xn в окрестности начала координат: f i 0, 0, ..., 0 xj x j j 1 n f i x1 , x2 , ..., xn f i 0, 0, ..., 0 Ri x1 , x2 , ..., xn , i 1, n , (3.36) где слагаемые Ri x1 , x2 , ..., x n , i 1, n , содержат члены не ниже второго порядка малости относительно x1 , x2 , ..., xn . Поскольку начало координат есть точка покоя системы (3.35), то f i 0, 0, ..., 0 0 , i 1, n . Кроме того, значения частных производных f i 0, 0, ..., 0 , i 1, n , j 1, n , есть постоянные величины. Поэтому, полагая x j 124 aij f i 0, 0, ..., 0 , i 1, n , j 1, n , запишем систему (3.35) в следующем x j виде: dx. n dt a1 j x j R1 x1 , x2 , ..., xn , j 1 n dx2 a 2 j x j R2 x1 , x2 , ..., xn , dt j 1 n dxn anj x j Rn x1 , x2 , ..., xn . dt j 1 (3.37) Так как понятие устойчивости точки покоя x1 0, x1 0, ..., xn 0 автономной системы дифференциальных уравнений (3.35) связано с малой окрестностью начала координат фазового пространства, то естественно ожидать, что поведение решения этой системы будет определяться главными линейными членами разложений (3.36) функций f i x1 , x1 , ..., xn , i 1, n . Поэтому наряду с системой (3.37) рассмотрим систему, которая получается из (3.37) путем отбрасывания слагаемых Ri x1 , x2 , ..., x n , i 1, n : dx. n dt a1 j x j , j 1 n dx2 a2 j x j , dt j 1 n dxn anj x j . dt j 1 (3.38) Система (3.38) называется системой уравнений первого (линейного) приближения для системы (3.37). Для систем (3.37) и (3.38) справедлива следующая теорема. Теорема 3.8. Если все корни характеристического уравнения системы дифференциальных уравнений (3.38) имеют отрицательные действительные части, то точка покоя x1 0, x1 0, ..., xn 0 системы (3.33), а 125 также исходной системы (3.37) асимптотически устойчива. Если хотя бы один из корней характеристического уравнения системы (3.33) имеет положительную действительную часть, то точка покоя x1 0, x1 0, ..., xn 0 системы (3.38) и системы (3.37) неустойчива. Данная теорема определяет условия, при которых возможно исследование устойчивости точки покоя автономной системы дифференциальных уравнений (3.35) по первому (линейному) приближению. Во всех остальных случаях такое исследование, вообще говоря, невозможно, так как начинает сказываться влияние членов второго порядка малости. Пример 3.7. Исследовать по первому приближению устойчивость точки покоя x 0, y 0 следующих систем дифференциальных уравнений: dx dt 2 x 8 sin y, а) dy 3 y 2 e x cos y, dt dx 2 dt 2 x y 5 y , б) 3 dy 3 x y x . dt 2 Решение. а) Разложим функции sin y , cos y и e x по формуле Тейлора: x2 xn e 1 x ... r1 x , 2! n! x 2 n 1 y3 y5 n y sin y y ... 1 r y, 3! 5! 2n 1! 2 2n y2 y4 n y cos y 1 ... 1 r y , 3! 4! 2n ! 3 где r1 x , r2 y и r3 y – остаточные члены формул Тейлора. Выделяя в этих разложениях члены первого порядка малости, приходим к системе первого приближения dx dt 2 x 8 y, dy 3 y 2 1 x 1, dt или 126 dx dt 2 x 8 y, dy x 3 y. dt Составляем для полученной системы первого приближения характеристическое уравнение 2 8 1 3 0, или 2 2 0 , корнями которого являются 1, 2 1 i 7 . 2 1 – отрицательны. Сле2 довательно, согласно теореме 3.8 точка покоя x 0, y 0 системы первого приближения, а так же исходной системы дифференциальных уравнений асимптотически устойчива. Действительные части этих корней Re 1, 2 б) Система первого приближения имеет вид dx dt 2 x y , dy 3 x y, dt x3 поскольку нелинейные слагаемые 5y и в правых частях уравнений 2 заданной системы имеют порядок малости относительно y и x не ниже двух. Характеристическое уравнение системы первого приближения 2 2 1 3 1 0 или 2 3 12 0 3 13 3 13 и 2 , причем 1 0 , а 2 2 2 0 . Поэтому, как следует из теоремы 3.8 точка покоя x 0, y 0 сис- имеет действительные корни 1 127 темы первого приближения и заданной исходной системы является неустойчивой. Упражнения. 1. Определить характер точки покоя x 0, y 0 следующих систем дифференциальных уравнений. Схематично сделать чертеж фазовых траекторий системы. 5 dx 2 x y, dt 7 а) dy 7 x 3 y; dt dx dt x 2 y, б) dy x y; dt dx dt x 3 y, в) dy x y; dt dx dt 2 x y, г) dy 3 x y; dt dx dt 3 x y, д) dy x y; dt dx dt 3 x, е) dy 3 y; dt 2. Исследовать на устойчивость точку покоя x 0, y 0, z 0 следующих систем дифференциальных уравнений: dx dx dx dt x y 5 z , dt x, dt 2 x y, dy dy dy а) 2 y z , б) 2 x y , в) x 2 y, dt dt dt dz dz dz 3 z ; x y z ; dt dt dt x 3 y z; 3. В зависимости от значений параметра определить характер и исследовать устойчивость точки покоя x 0, y 0 системы дифференциальных уравнений: dx dt 2 x y, dy x y; dt 128 4. Определить, при каких значениях параметра точка покоя x 0, y 0 следующих систем дифференциальных уравнений будет устойчива: dx dt x y, а) dy 3 x y; dt dx dt 3 x y, б) dy x y; dt 5. Используя критерий Гурвица, найти значения параметра , при которых тривиальное решение следующих систем дифференциальных уравнений будет асимптотически устойчиво: dx dt 1 y, а) dy 4 x 4 y; dt dx dt y, dy б) 4 x z, dt dz dt 2 x y 2 z; 6. С помощью функции Ляпунова исследовать устойчивость точки покоя x 0, y 0 следующих систем дифференциальных уравнений: dx 3 2 dt x y x y , а) dy x y xy; dt dx 3 dt y x , б) dy x y 3 ; dt 7. Исследовать на устойчивость по первому приближению точку покоя x 0, y 0 следующих систем дифференциальных уравнений: 3 dx x y y3, dt 2 а) dy x 1 y 2 x 2 y 2 ; dt 3 dx dt 5 x y cos y , б) dy 3 x 2 y y 3e y ; dt 129 Ответы. 1. а) устойчивый узел; б) седло; в) центр; г) устойчивый фокус; д) неустойчивый узел; е) неустойчивый дикритический узел. 2. а) точка покоя x 0, y 0, z 0 асимптотически устойчива; б) точка покоя x 0, y 0, z 0 неустойчива; в) точка покоя x 0, y 0, z 0 асимптотически устойчива. 9 3. а) при точка покоя x 0, y 0 – устойчивый фокус, асим4 птотически устойчива; 9 б) при точка покоя x 0, y 0 – устойчивый узел, асимптотически 4 устойчива 9 в) при 2 точка покоя x 0, y 0 – устойчивый узел, асимптоти4 чески устойчива; г) при 2 точка покоя x 0, y 0 – седло, неустойчива. 4. а) ни при каких ; 5. а) 1 ; б) ; 2 2; . б) 0 4 . 6. а) v x 2 y 2 , точка покоя x 0, y 0 устойчива; б) v x 2 y 2 , точка покоя x 0, y 0 неустойчива. 7. а) точка покоя x 0, y 0 асимптотически устойчива; б) точка покоя x 0, y 0 неустойчива. 130 БИБЛИОГРАФИЯ 1. Арнольд В.И. Обыкновенные дифференциальные уравнения / В.И. Арнольд – М.: Наука, 1962. 2. Демидович Б.П. Лекции по математической теории устойчивости / – Б.П. Демидович. М.: Наука. 472 с. 3. Краснов М.Л. Сборник задач по обыкновенным дифференциальным уравнениям / М.Л. Краснов, А.И. Киселев, Г.И. Макаренко. М.: Высшая школа, 1978. 287 с. 4. Матвеев Н.М. Сборник задач и упражнений по обыкновенным дифференциальным уравнениям / Н.М. Матвеев. – М.: Росвузиздат, 1962. – 291 с. 5. Петровский И.Г. Лекции по теории обыкновенных дифференциальных уравнений / И.Г. Петровский. М.: МГУ, 1984. 6. Письменный Д.Т. Конспект лекций по высшей математике / Д.Т. Письменный. – М.: Айрис-пресс, 2003. 2 часть. 256 с. 7. Понтрягин Л.С. Дифференциальные уравнения и их приложения / Л.С. Понтрягин. М.: Наука, 1988. 208 с. 8. Самойленко А.М. Дифференциальные уравнения: примеры и задачи / А.М. Самойленко, С.А. Кривошея, Н.А. Перестюк. Учебн. пособие. М.: Высшая школа, 1989. 383 с. 9. Степанов В.В. Курс дифференциальных уравнений / В.В. Степанов. М.: Гос. изд. физ.-мат. лит. 1959. 468 с. 10. Тихонов А.Н. Дифференциальные уравнения / А.Н. Тихонов, А.Б. Васильева, А.Г. Свешников. М.: Наука, 1985. 231 с. 11. Четаев Н.Г. Устойчивость движения / Н.Г. Четаев. М.: Наука, 1990. 176 с. 131 ПРИЛОЖЕНИЕ Таблица 1 Основные типы точек покоя линейных однородных систем дифференциальных уравнений и их устойчивость Корни 1 , 2 Тип точки покоя характеристического уравнения 1 2 3 Действи1 0 , Устойчивый узел тельные, 2 0 различные: Устойчивость точки покоя 4 1 2 Асимптотически устойчива 1 0 , Неустойчивый узел 2 0 Неустойчива 1 0 , 2 0 Седло Неустойчива 132 Окончание таблицы 1 1 Комплексные: 2 a 0, b0 3 4 Устойчивый фокус 1 a ib 2 a ib Асимптотически устойчива a 0, b0 Неустойчивый фокус Неустойчива a 0, b0 Центр Устойчива Действительные, равные: 0 Устойчивый узел 1 2 Асимптотически устойчива 0 Неустойчивый узел Неустойчива 133 ДЛЯ ЗАМЕТОК 134 ДЛЯ ЗАМЕТОК 135 Учебное издание Банина Нина Валерьевна Гозбенко Валерий Ерофеевич Системы дифференциальных уравнений и устойчивость их решений Учебное пособие по дисциплине «Математика» для студентов всех специальностей Издано в авторской редакции Компьютерная верстка: В.Е. Гозбенко, Н.В. Банина Подписано в печать 22.12.2009 Формат 60x84/16. Печать офсетная Усл. печ. л. 8,5. Уч.-изд. л. 9,1. План 2009 г. Тираж 500 экз. Типография ИрГУПС, г. Иркутск, ул. Чернышевского, 15. 136