Конспект лекций по разделу Основы теории погрешностей (обновлен 14 апреля) (1)
реклама
 (1)")
Министерство науки и высшего образования
Российской Федерации
Федеральное государственное бюджетное образовательное
учреждение высшего образования
ТОМСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ СИСТЕМ
УПРАВЛЕНИЯ И РАДИОЭЛЕКТРОНИКИ (ТУСУР)
Кафедра компьютерных систем в управлении и проектировании
(КСУП)
ЭЛЕКТРОННЫЙ КОНСПЕКТ ЛЕКЦИЙ
ПО КУРСУ «МЕТРОЛОГИЯ И ТЕХНИЧЕСКИЕ ИЗМЕРЕНИЯ»
РАЗДЕЛ «ОСНОВЫ ТЕОРИИ ПОГРЕШНОСТЕЙ»
Старший преподаватель
кафедры КСУП
К. К. Жаров
Томск, 2021
2
Содержание
1 Классификация погрешностей измерений....................................................................................3
2 Систематические погрешности......................................................................................................6
2.1 Классификация систематических погрешностей.................................................................6
2.2 Нормирование основной погрешности средств измерений................................................7
2.3 Обнаружение и исключение систематических погрешностей..........................................15
2.4 Введение поправок. Понятие НСП......................................................................................18
3 Случайные погрешности..............................................................................................................21
3.1 Введение.................................................................................................................................21
3.2 Законы распределения случайных величин и их параметры............................................21
3.3 Параметры законов распределения случайных величин и их оценки..............................33
3.4 Проверка принадлежности результатов измерений нормальному распределению........37
3.5 Еще несколько слов о нормальном распределении............................................................38
3.6 Особенности уровня доверительной вероятности 0,9.......................................................40
4 Суммирование погрешностей......................................................................................................41
4.1 Введение.................................................................................................................................41
4.2 Трудности расчетного суммирования погрешностей.........................................................42
4.3 Суммирование погрешностей в метрологических измерениях........................................43
4.4 Суммирование погрешностей при проведении технических измерений.........................45
4.5 Суммирование систематических погрешностей известного знака...................................45
4.6 Суммирование систематических погрешностей неизвестного знака...............................46
4.7 Пример суммирования систематических погрешностей. Нормирование
дополнительной погрешности СИ..................................................................................................49
4.8 Пример суммирования НСП, заданных доверительными интервалами с разной
доверительной вероятностью..........................................................................................................51
4.9 Суммирование случайных погрешностей...........................................................................52
4.10 Пример суммирования погрешностей, заданных своими СКП......................................54
4.11 Пример суммирования случайных погрешностей, заданных доверительными
интервалами с различной доверительной вероятностью..............................................................54
4.12 Суммирование случайных и систематических погрешностей........................................55
4.13 Пример суммирования систематических и случайных погрешностей..........................58
4.14 Алгоритм обработки результатов прямого однократного технического измерения.....60
4.15 Алгоритм обработки результатов прямого многократного технического равноточного
измерения..........................................................................................................................................61
4.16 Определение погрешности обыкновенного косвенного измерения...............................63
4.17 Алгоритм обработки результатов обыкновенных косвенных измерений......................70
4.18 Пример поиска погрешности обыкновенного косвенного измерения...........................71
4.19 Прием приведения косвенных многократных измерений к прямым..............................72
5 Список использованной литературы...........................................................................................74
3
1 Классификация погрешностей измерений
Погрешность измерения — отклонение результата измерения от истинного
значения ФВ. Так как истинное значение ФВ нам никогда не будет известно, используют действительное значение ФВ.
Выделяют различные классификации погрешностей.
1) По способу выражения:
1.1) Абсолютные погрешности есть разница между истинным и измеренным значением измеряемой величины, Δ X = X изм − X ист = X изм − X дст . Имеют
размерность измеряемой физической величины: [ Δ R ] = [ Ом ] , [ Δ l ] = [ м ] .
Действительное значение величины — это значение, известное с такой точностью, что в данной измерительной задаче это значение принимается за истинное. Например, это значение, измеренное более точным прибором, воспроизведенное мерой или посчитанное теоретически.
1.2) Относительные погрешности есть отношение абсолютной погрешноΔX
ΔX
=
сти к истинному значению величины, δ X =
, являются безразмерX ист
X дст
ными.
Можно ввести первую качественную характеристику измерения — точность.
Точность измерения определим как величину, обратную его относительной по1
грешности, T =
. В разных разделах метрологии (метрология больших веδX
личин, метрология малых величин) точность может вводиться по-разному.
1.3) Приведенные погрешности есть абсолютные погрешности, приведенΔX
ные к некой нормирующей величине, γ X =
. Эти погрешности, как правиN
ло, применяются для оценки точностных характеристик СИ. Являются безразмерными. В роли нормирующей величины могут выступать:
4
- предел измерения (амперметр постоянного тока, измеряющий ток от 0 до 1 А,
будет иметь нормирующее значение 1 А);
- размах шкалы, если ноль прибора лежит где-то внутри шкалы (амперметр постоянного тока, измеряющий ток от -1 А до +1 А, будет иметь нормирующее
значение 2 А);
- для приборов с существенно нелинейной шкалой нормирующим значением
будет геометрическая длина шкалы (указывается в паспорте СИ);
- для приборов, измеряющих небольшие отклонения измеряемой величины от
номинального значения, нормирующим значением будет их номинальное значение.
ВНИМАНИЕ. Это — способ выражения погрешности, и этот способ может
меняться в зависимости от наших предпочтений или предъявленных требований. Попытка классифицировать исследованную в лабораторной работе погрешность как абсолютную или относительную является неправильной. Следует указать другую характеристику погрешности — например, погрешность является методической, дополнительной, аддитивной и т.д.
2) В зависимости от поведения измеряемой величины во времени:
2.1) статические;
2.2) динамические.
3) По условиям эксплуатации СИ:
3.1) основные — возникают при эксплуатации СИ в нормальных условиях
(указанных в паспорте прибора);
3.2) дополнительные — возникают при эксплуатации СИ в условиях, отличающихся от нормальных (пониженная температура, повышенная влажность,
не то напряжение питания);
3.3) рабочие (или эксплуатационные) — возникают в реальных рабочих
5
условиях, где некоторые влияющие находятся в нормальных условиях, а другие
выходят за нормальные пределы.
4) По характеру зависимости от измеряемой величины погрешности делят на:
4.1) аддитивные, англ. «add» — складывать; они не зависят от измеряемой величины и если они выражены в абсолютной форме, то являются постоянными — Δ X адд = const ;
4.2) мультипликативные, англ. «multiply» — умножать; они линейно или
нелинейно зависят от измеряемой величины; в случае линейной зависимости
относительная форма представления мультипликативной погрешности есть величина постоянная — δ X млт = const .
5) По характеру проявления при повторных измерениях погрешности делят
на:
5.1) систематические, эти погрешности при проведении повторных измерений остаются неизменными по величине и знаку или меняются заранее известным образом.
Второй качественный показатель измерения — его правильность, чем меньше
величина систематической погрешности, тем правильнее измерение. Устранение систематических погрешностей называется исправлением результата (введением поправки).
5.2) Случайные погрешности при проведении повторных измерений непредсказуемым образом меняются по величине и знаку; являются принципиально неустранимыми.
Третий качественный показатель измерения — его сходимость, чем меньше величина случайной погрешности, тем больше сходимость измерения.
5.3) Грубые погрешности (они же промахи), их величина значительно превосходит ожидаемую величину погрешности. Должны быть обнаружены и ис-
6
ключены из измерения
Четвертый качественный показатель измерения — его годность. Измерение,
содержащее грубую погрешность, считается негодным и должно быть отброшено.
Делить на случайные и систематические погрешности можно, только обладая
полной информацией об объекте измерений. При изготовлении серии приборов
разброс их параметров — случайная погрешность, в то время, как у одного конкретного прибора — систематическая.
2 Систематические погрешности
Напоминание: систематические погрешности при проведении повторных измерений остаются неизменными по величине и знаку или меняются заранее известным образом.
2.1 Классификация систематических погрешностей
Систематические погрешности бывают следующих видов:
1) методические погрешности вызваны несовершенством метода измерения,
а также упрощениями и допущениями при выборе модели объекта измерения;
2) инструментальные погрешности вызваны несовершенством СИ;
3) погрешности установки вызваны неправильной калибровкой, установкой
СИ, а также взаимным влиянием СИ друг на друга;
4) внешние погрешности вызваны отклонением внешних влияющих величин
от их нормальных значений;
5) субъективные погрешности (они же погрешности оператора) бывают:
5.1) погрешностями отсчета, принципиально отсутствуют в цифровых
приборах;
5.2) погрешности присутствия (температурная, электрическая наводка на
измерение от человеческого тела);
7
5.3) погрешности действия (неправильная настройка СИ, неумение работать с СИ).
6) По поведению во времени систематические погрешности разделяют на:
6.1) постоянные (ошибка установки нуля);
6.2) переменные;
6.2.1) монотонно переменные (разряд батареи прибора);
6.2.2) периодически переменные (суточные колебания напряжения в
промышленной сети, суточные колебания температуры);
6.2.3) дрейфовые (нестационарный случайный процесс).
2.2 Нормирование основной погрешности средств измерений.
В нормальных условиях работы СИ демонстрирует так называемую основную погрешность. Эта погрешность приведена в паспорте СИ и может быть
нормирована по-разному.
У самых простых СИ предел допускаемой основной погрешности нормируется просто числом. Например, ±0,5° погрешность передачи фазы сигнала по соединительному кабелю.
Самым часто используемым способом является разделение погрешности СИ
на аддитивную и мультипликативную часть. Одним из способов такого разделения является присвоение этому СИ определенного класса точности (разновидности классов точности указаны далее по тексту).
Если погрешность СИ является сложной и нелинейной, то ее описывают соответствующей формулой. Например, зависимость погрешности измерения разности фаз, вызванная нелинейными искажениями сигнала, может быть для
произвольного фазометра описана как Δ ϕ = ± 1,6 arctg (K ни ) .
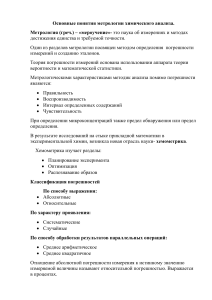
В самом сложном случае, когда погрешность существенно нелинейная и с
8
трудом аппроксимируется (или есть другие величины, от которых зависит погрешность, поэтому нужно привести семейство зависимостей), то в паспорте
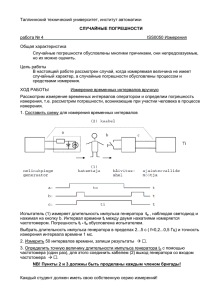
СИ используют графическое представление погрешности.
Рисунок 2.2.1— погрешность измерения модуля коэффициента отражения
Класс точности СИ — это метрологическая характеристика СИ, определяющая гарантированную границу его основной погрешности.
Таким образом, класс точности — это не погрешность СИ, но это его характеристика, которая однозначно определяет максимальную погрешность прибора в нормальных условиях работы.
По характеру зависимости от измеряемой величины основная погрешность
СИ может быть чистой аддитивной, чистой мультипликативной, или аддитивной и мультипликативной. В соответствии с этим, выделяют три типа классов
точности приборов.
Первый класс точности назначают приборам с основной аддитивной погрешностью. То есть у этих приборов при измерении любых значений измеряемой величины всегда будет одна и та же абсолютная погрешность:
Δ X осн = const .
9
Примером подобных приборов является измерительная линейка — погрешность в половину цены деления (0,5 мм) будет одинаковой и при измерении
3 мм, и при измерении 23 мм, и при измерении 30 см этой же линейкой.
Было бы логичным нормировать именно эту погрешность и указывать ее в
паспорте прибора. Так и делают — скажем, у измерительной линейки класс
точности будет 0,5 мм, у штангенциркуля 1 мкм и так далее. Однако, в электрических измерениях мы чаще всего имеем дело с многопредельными приборами
(вольтметр может измерять на диапазонах 0 – 2 В, 0 – 20 В, 0 – 200 В и так далее). Указывать на каждом диапазоне свою величину аддитивной погрешности
не рационально.
Таким образом, у приборов с основной аддитивной погрешность за класс
точности принимают величину их приведенной погрешности, выраженной в
процентах:
Кл. т . = γ = γ X⋅100 % ,
где γ — обозначение класса точности для СИ такого типа,
γ X — приведенная погрешность.
Вспоминая определение приведенной погрешности, получаем:
γ =
Δ X осн
⋅100 % .
N
Возможно два случая: СИ с равномерной шкалой и СИ с неравномерной шкалой.
У СИ с основной аддитивной погрешностью и равномерной шкалой нормирующим значением обычно выступает предел измерения X к . Таким образом,
формулы для нахождения их основной погрешности, нормированной классом
точности, имеют следующий вид:
Δ X осн =
γ⋅X к
,
100 %
10
δ X осн =
γ⋅X к
.
X изм⋅100 %
Основная погрешность таких СИ в абсолютной форме, определяемая по их
классу точности, имеет размерность измеряемой величины:
[Δ X осн ] = [ X изм ] .
На СИ такой класс точности обозначается простым числом:
Таким образом, амперметр класса точности
,
.
, измеривший 1 А на пределе
3 А, будет иметь ±0,03 A основной погрешности измерения.
Существуют СИ с сильно нелинейной шкалой (кусочно-линейной, логарифмической и т. д.). У приборов с основной аддитивной погрешностью и неравномерной шкалой нормирующим значением является геометрическая длина шкалы Lшк , и основная погрешность в абсолютной форме, определяемая по
их классу точности, имеет единицы измерения длины:
Δ X осн = Δ l осн =
γ⋅Lшк
100 %
[Δ X осн ] = [ м ] .
По сути, у таких СИ класс точности нормирует погрешность движения стрелки по шкале (погрешность позиционирования измерительного механизма).
Обозначается такой класс точности следующим образом:
Пример: СИ класса точности
,
.
ошибается на 2% от длины рабочей части
шкалы (указана в паспорте), когда позиционирует стрелку по шкале. Для того,
чтобы перевести эту погрешность в погрешность измеряемой величины, необходимо знать, каким образом была проградуирована шкала прибора, и интерполировать соответствующей функцией.
К СИ с основной аддитивной погрешностью, как правило, относятся аналого-
11
вые стрелочные приборы с магнитоэлектрическим измерительным механизмом.
Погрешность в таких приборах вызвана трением в подпятниках измерительного
механизма. В англоязычной технической литературе такие приборы обознаются
как прибора типа a. СИ с равномерной шкалой: аналоговые амперметры,
вольтметры, манометры. С неравномерной шкалой: аналоговые омметры,
вакуумметры.
Второй тип классов точности назначается СИ с ярко выраженной мультипликативной основной погрешностью. Как правило, СИ изготовлено так, что
эта погрешность линейна, и у этих СИ относительная форма представления
основной погрешности есть величина постоянная:
δ X осн = const .
Без дальнейших усложнений за класс точности подобных приборов принимают величину их относительной погрешности, выраженной в процентах:
Кл. т . = δ = δ X⋅100 % ,
где δ — обозначение класса точности для СИ такого типа,
δ X —относительная погрешность.
Формулы для нахождения их основной погрешности, нормированной
классом точности, приведены ниже:
Условное обозначение:
δ X осн =
δ ,
100 %
Δ X осн =
δ⋅X изм
.
100 %
,
Пример: амперметр класса точности
бется на ±0,002 A .
.
, измеряя 1 А на пределе 3 А, оши-
12
К СИ с погрешностью такого типа относятся масштабные измерительные
преобразователи (шунты, добавочные сопротивления, измерительные трансформаторы, измерительные усилители). В англоязычной литературе это СИ типа b.
Третий тип классов точности присваивается СИ, чья основная погрешность
имеет как аддитивный, так и мультипликативный характер. Две составляющие
погрешности требуют двух чисел для ее нормирования.
За класс точности подобных приборов принимают величины их приведенных
погрешностей (в процентах) в начале и конце шкалы:
Кл. т . = γ к / γн ,
где γн — приведенная погрешность в начале шкалы ( X изм = 0 ) в процентах;
γк — приведенная погрешность в конце шкалы ( X изм = X к ) в процентах.
Составляющая γн нормирует чистую аддитивную погрешность прибора, а
γк — аддитивную и максимальную мультипликативную.
Для того, чтобы найти основную погрешность, нормированную классом
точности, необходимо использовать следующие формулы:
Δ X осн =
γн
γ к − γн
⋅X к +
⋅X изм ,
100 %
100 %
[
(
δ X осн = γк + γн⋅
Xк
− 1 ∗100 .
X изм
Обозначаются подобные приборы как
)]
,
. В англоязычной тех-
нической литературе это приборы типа c/d.
Подобные надписи не следует читать как «0,15/0,01 = 15». Нет, такое обозначение говорит нам, что в начале шкалы у такого прибора погрешность 0,01% от
предела измерения, а в конце шкалы — 0,15% от предела измерения.
Такая погрешность характерна для всех цифровых приборов.
Последнее, что нужно сказать про классы точность средств измерений —
13
класс точности не может быть произвольным числом. Существует ряд разрешенных значений классов точности, утвержденный в государственном стандарте ГОСТ 8.401 - 80. Согласно этому ряду, класс точности СИ может принимать одно из следующих значений:
Кл. т . = [1,0 ; 1,5 ; 2,0 ; 2,5 ; 3,0* ; 4,0 ; 5,0 ; 6,0 ]⋅10n ,
где n = 1, 0, −1, −2, … .
Примечание: значение 3,0 используется только для высокоточных СИ.
Высокоточным является СИ класса точности 1,0 и выше. То есть значение 3,0 из
ряда предпочтительных чисел применяется для классов точности 0,3 и точнее.
Таблица 2.1 — сводная таблица классов точности СИ
Характер основ- Форма выражения класса Обозначение
ной погрешности
точности СИ
класса
точности
Аддитивная
Приведенная погрешность в
%. Нормирующая величина
N – предел измерения X к .
Приведенная погрешность в
%. Нормирующая величина
N – длина шкалы Lшк .
Мультипликативная
Относительная погрешность в %.
Аддитивная и
Приведенная погрешность в
мультипликатив% в двух точках шкалы:
ная
X изм = 0 и X изм = X к .
Погрешность результата измерения
абсолютная, ед. ФВ
Δ X осн =
γ⋅X к
100%
γ⋅Lшк
,
100 %
Δ X осн определяется
отдельно
Δ lосн =
Δ X осн =
δ⋅X изм
100 %
γн
⋅X +
100% к
γ − γн
+ к
⋅X изм
100%
Δ X осн =
относительная,
безразмерная
δ X осн =
γ⋅X к
X изм⋅100 %
δ X осн =
Δ X осн
X изм
δ X осн =
δ
100%
δ X осн = γ к +
X
+ γ н⋅ к − 1
X изм
(
)
Класс точности для СИ можно присвоить не всегда. Например, для СИ, измеряющих большое количество самых разных физических величин с существенно
различающейся точностью, задание единого класса точности не представляется
возможным. Такие приборы в своем паспорте имеют перечисление всех диапазонов измерений с явным указанием погрешности на этом диапазоне (таблица
погрешностей).
Причем это может быть как уже знакомая формула
14
( RR − 1) , R = [10..100 Ом] ,
δ R = 0,15 + 0,01⋅
к
так и что-нибудь вроде
Δ U осн=±(0,005 ⋅U изм + 2 е . м . р .) .
В данной записи е . м . р . стоит понимать как единицу младшего разряда
цифрового кода, в англоязычной литературе digits (или counts).Определить,
какой конкретно разряд в нашем измерении младший, возможно, зная
количество индикаторов на цифровом приборе.
Пример №1. Пусть трехиндикаторным вольтметром с погрешностью
Δ U осн = ±(0,005⋅U изм + 2 е . м . р .)
измерено значение 5,85 В на пределе 10 В.
Определить погрешность измерения.
Решение: 5,85 В на индикаторе прибора будут отображены как 5,85. Очевидно, что младший разряд тут — 0,01 В. Тогда погрешность найдем как:
Δ U осн = 0,005 ⋅5,85 + 2⋅0,01 = 0,04925 (B) ≈ 0,05 (B) .
Пример №2. Пусть четырехиндикаторным омметром с погрешностью
Δ Rосн = ±(0,004⋅ R изм + 2 е . м . р .) измерено значение 2194 Ом на пределе 10 кОм.
Определить погрешность измерения.
Решение: 2194 Ом на индикаторе прибора будут отображены как 2194. Младший разряд здесь — 1 Ом. Тогда погрешность найдем как:
Δ U осн = 0,004 ⋅2914 + 2 ⋅1 = 13,656 (Ом) ≈ 14 (Ом).
То есть е.м.р. это единица в последнем цифровом разряде на табло прибора.
Существуют и другие способы нормирования разделения основной погрешности СИ на аддитивную и мультипликативную части, помимо присвоения
классов точности.
Аддитивная часть может быть задана через е.м.р., через долю от предела измерения или в абсолютной форме. Мультипликативную часть задают через
15
долю от измеряемой величины, причем в англоязычной технической литературе
часто используется обозначение ppm (point per million), одна миллионная доля
погрешности (то есть ppm = 10−6⋅Х изм ).
Например: Δ U осн = ±(0,004⋅ U изм + 2 е . м . р .) , Δ I осн = ±(0,015 % ⋅ I изм + 2⋅10−6 I к) ,
Δ C осн = ±(0,0035⋅ Cизм + 0,002) нФ , Δ f = ±(50 ppm +3 counts) .
Последняя формула записана в англоязычной нотации. В русскоязычной записи та же погрешность будет выглядеть как Δ f осн = ±(5⋅10−6⋅f изм+3 е . м . р .)
2.3 Обнаружение и исключение систематических погрешностей
Инструментальные погрешности принадлежат данному СИ, могут быть
определены при испытаниях СИ и занесены в паспорт СИ.
Для исключения инструментальных погрешностей практически единственным способом является поверка СИ — определение метрологическим органом
действительных метрологических характеристик СИ и установление его пригодности к применению. Все используемые в сферах ГРОЕИ (государственное
регулирование и обеспечение единства измерений) средства измерения подлежат обязательной периодической поверке.
Методические погрешности связаны не с прибором, а с методом его исполь зования. Они не могут быть приписаны данному СИ и не могут быть указаны в
паспорте прибора. Другая причина методических погрешностей — сознательное или вынужденное измерение не той величины, которую надо измерить, а
некоторой другой, близкой, но не равной ей.
Пример №1: вольтметр шунтирует участок цепи, на котором измеряется
напряжение.
Пример №2: измерение температуры раскаленных болванок, выходящих из
прокатной печи. Всегда будет измеряться наружная температура болванки, так
16
как сверлить каждую болванку для установки датчика температуры в центре никто не будет.
Особенность методических погрешностей — так как они не могут быть указаны в паспорте прибора, они должны оцениваться экспериментатором самостоятельно; в разных условиях одно и то же СИ может дать как пренебрежимо
малую, так и недопустимо большую методическую погрешность (измерение
напряжения на сопротивлении нагрузки, намного меньшем внутреннего сопротивления вольтметра в противовес измерению напряжения на сопротивлении,
по величине соизмеримым с сопротивлением вольтметра).
Оценка методических погрешностей экспериментатором требует высокой
квалификации оператора и постановки обстоятельного экспериментального
метрологического исследования принятого метода измерений с целью определения упрощений в зависимостях, положенных в основу модели объекта измерения и метода измерений. Если этот метод является установившимся, неизменным в течение длительного времени, то погрешности этого метода могут быть
установлены и занесены в паспорте метода (не путать с паспортом средства измерения!) и приведены в МВИ.
Обнаружение неизвестных систематических погрешностей может быть
выполнено следующими способами:
1) провести измерение другим методом, максимально отличающимся от используемого;
2) резко изменить условия измерения (измерить при другой температуре окружающей среды, сменить оператора, изменить время измерения);
3) провести контрольное измерение в лаборатории другого учреждения;
4) использовать априорные знания об объекте измерений или использовать
более точные модели объекта измерений (например, неважно, каким способом
измеряется сумма углов в треугольнике, она должна быть равна 180°).
17
Существуют методы измерения, позволяющие исключить систематическую
погрешность, не измеряя ее. К ним относят:
1) метод замещения;
2) метод противопоставления;
3) метод дополнения (см. вводную лекцию);
4) метод компенсации по знаку — проводятся два измерения так, чтобы погрешность входила в каждое измерение с противоположным знаком,
x 1 = xист + Δ x , x 2 = xист − Δ x . За результат принимается полусумма двух изме-
рений:
x изм =
x1 + x2
x + Δ x + x ист − Δ x
2 x ист
= ист
=
= x ист . Применяется для
2
2
2
устранения погрешностей люфта, гистерезиса, трения в измерительных механизмах.
5) Метод рандомизации — систематическая погрешность переводится в случайную и уменьшается с использованием аппарата теории вероятностей.
Пример №1: для ослабления влияния постоянного электромагнитного поля
неизвестной направленности провести 12 измерений, каждый раз поворачивая
электроизмерительный прибор на 30°. Полученную выборку усреднить, посчитать дисперсию и так далее.
Пример №2: менять оператора после каждого измерения.
6) Метод прогрессивных измерений — через равные промежутки времени
проводятся измерения, оценивается погрешность каждого измерения. Проверяется выполнение условия
Δ X N +Δ X N +2
= Δ X N +1 . Если условие выполняется, то
2
делаем вывод о постоянно прогрессирующей погрешности и вводим один поправочный множитель вместо ряда поправочных слагаемых.
Способы исключения систематических погрешностей можно разделить на
три группы:
18
1) до начала измерений. Сюда входит планирование измерительного эксперимента (правильный выбор МВИ, СИ, проведение так называемой профилактики погрешностей: поиск источников, вносящих наибольшую погрешность, и
устранение их до начала измерения);
2) в процессе измерений (корректное использование СИ: калибровка, установка нуля, устранение погрешности параллакса, фокусировка луча осциллографа и т. д.; использование вышеописанных методов измерения;);
3) после измерения (введение поправок, оценка неисключенной систематической погрешности НСП).
2.4 Введение поправок. Понятие НСП.
После того, как стали известны размер и знак систематической погрешности,
возможно ее исключение из результата измерения. Процесс исключение систематической погрешности известного знака и величины называется исправлением результата измерения (или введением поправки).
Поправка в абсолютной форме есть величина абсолютной погрешности,
взятой с противоположным знаком (поправочное слагаемое):
Δ X попр = −Δ X мет .
Соответственно, чтобы получить исправленный результат, к результату измерения прибавляют величину поправки:
X испр = X изм + Δ X попр .
Поправку в абсолютной форме удобно вводить для аддитивных методических
погрешностей.
Поправка в относительной форме представляет собой поправочный множитель. Пусть
Y = S ⋅ X изм ,
19
где Y — выходная величина, X — входная величина, S — чувствительность
прибора.
Пусть чувствительность прибора изменилась:
S' = S + ΔS .
Тогда измеренная величина приобретет мультипликативную погрешность:
Y неиспр = S ' ⋅ X изм = (S + Δ S)⋅X изм = S⋅X изм + Δ S⋅X изм = Y ист + Δ Y мульт .
Теперь необходимо ввести поправочный множитель:
βпопр =
S
.
S + ΔS
Тогда исправленный результат может быть найден как:
2
Y испр
= Y неиспр ⋅βпопр = (S + Δ S )⋅X изм⋅βпопр
=
S ⋅X изм + Δ S⋅S⋅X изм
=
=
S +ΔS
S⋅X изм⋅( S + Δ S)
= S⋅X изм .
S+ ΔS
Поправку в относительной форме удобно вводить для линейных мультипликативных погрешностей.
В случае аддитивной и мультипликативной систематической погрешности:
X испр = (X изм + Δ X попр )⋅βпопр .
В случае введения поправок на инструментальную погрешность значения
Δ X попр и βпопр определяют по результатам поверки и представляют в виде та-
блиц и графиков в паспорте СИ.
Особенность исправления результата состоит в том, что поправка вводится
на каждый источник систематической погрешности отдельно. Пример: при
стрельбы делают поправку на ветер, поправку на движение цели, поправку на
вращение Земле (в баллистике) и так далее. В целом, введение поправки устраняет влияние только одной вполне определенной систематической погрешности, поэтому в результат измерения может вводиться огромное количество по-
20
правок. Студентам рекомендуется ознакомиться с методикой измерений МИ
2145-91, там присутствует множество поправок. Также там присутствует интересный пункт 5.3.4.
Однако мы никогда не можем оценить влияющие факторы (ветер, движение
цели и так далее) с абсолютной точностью. Всегда после оценки величины погрешности остается некоторая неопределенность. В некоторых случаях нам известен источник систематической погрешности, мы можем оценить границы
этой погрешность, но никогда не можем уточнить знак (пример — инструментальная погрешность СИ; амперметр класса точности 1,0 на пределе 30 мА
ошибается на ±0,3 мА, но мы не знаем, плюс или минус 0,3 мА). Величина систематической погрешности, оставшаяся после исправления результата, имеет
неизвестный знак и носит название неисключенной систематической погрешности (НСП, Θ ).
К числу НСП относятся:
1) погрешности определения поправок;
2) погрешности, зависящие от точности измерения влияющих величин, входящих в формулы для определения поправок;
3) погрешности, связанные с колебаниями влияющих величин в процессе измерения (температура окружающей среды, напряжение питания и так далее).
Перечисленные погрешности малы по своей величине, и поправки на них не
вводятся. Поэтому НСП переходит в разряд случайных погрешностей. Как уже
упоминалось, другая причина перевода НСП в разряд случайных погрешностей
— отсутствие достоверной информации о знаке погрешности. В нашем курсе
будем считать, что НСП подчиняется равномерному закону распределения случайных величин.
Кроме того, если у нас имеется несколько различных НСП, оставшихся от
введения различных поправок, то для определения общей погрешности ре-
21
зультата требуется уметь правильно суммировать погрешности измерения
(«правильно» значит «с учетом их вероятностной природы»). Тема суммирования погрешностей будет рассмотрена отдельно.
3 Случайные погрешности.
3.1 Введение.
Напоминание: случайные погрешности при проведении повторных измерений меняются по величине и по знаку случайным образом.
Случайные погрешности вызваны огромным множеством влияющих на измерительных эксперимент факторов, учесть которые экспериментатор просто не в
состоянии, причем о влиянии некоторых факторов экспериментатор может вообще не догадываться. Случайные погрешности неизбежны при проведении
эксперимента, от них никак нельзя избавиться.
Для анализа случайных погрешностей применяют аппарат теории вероятностей и математической статистики. С точки зрения этих наук, случайная погрешность рассматривается как случайная величина (СВ).
Так как при измерении всегда существует случайная погрешность, то полная
погрешность измерения есть сумма систематической (неслучайной, детерминированной) и случайной (стохастической) составляющих. Таким образом, полная
погрешность измерения тоже является случайной величиной.
3.2 Законы распределения случайных величин и их параметры.
Из курса теории вероятностей известно, что СВ наиболее полно характеризуется своим интегральным законом распределения (интегральной функцией распределения). Это функция, значением которой для каждого x является вероятность наступления события, заключающегося в том, что случайная величина Х
примет значение меньше, чем х :
22
F( x) = P( X < x ) .
Это неубывающая функция, значение которой изменяется от F(−∞) = 0 (вероятность невозможного события равна нулю) до F(+∞) = 1 (вероятность достоверного события равна единице). Эта функция существует для всех СВ, как
для непрерывных, так и для дискретных.
Для СВ с непрерывной и дифференцируемой функцией распределения можно
определить дифференциальный закон распределения вероятностей:
ρ( x) =
d F (x)
.
dx
Эта функция также называется плотностью распределения вероятностей.
Она неотрицательна и подчинена условию нормировки:
+∞
∫ ρ(x ) dx
= 1.
−∞
Это условие следует из того, что вероятность достоверного события всегда
единица, поэтому площадь подынтегральной кривой плотности распределения
тоже единица.
Важное свойство: вероятность попадания СВ в интервал от a до b определяется как:
b
P(a ≤ x ≤ b) =
∫ ρ(x) dx .
a
Это свойство будет использовано на практике и на контрольных.
Случайная величина — вещь, естественно, случайная (стохастическая). Однако, ее поведение описывается неслучайным (детерминированным) законом распределения, который имеет неслучайные (детерминированные) параметры.
Основными числовыми характеристиками закона распределения СВ являются математическое ожидание и дисперсия.
+∞
M [x ] =
∫ x⋅ρ( x)dx .
−∞
23
Математическое ожидание (м.о.) характеризует центр тяжести распределения СВ. С точки зрения теории погрешностей м.о. погрешности измерения —
это его систематическая составляющая.
Характеристикой разброса отдельных результатов измерения относительно
центра является дисперсия:
+∞
D[ x] =
∫ ( x − M [ x ])2 ⋅ρ( x) dx .
−∞
Дисперсия может использоваться для характеристики точности распределения, но она имеет размерность квадрата измеряемой величины — дисперсия
выражает мощность рассеяния СВ вокруг своего центра. На практике пользуются действующим значением дисперсии, то есть средним квадратическим отклонением:
σ [x ] = + √ D[x ] .
Примечание: связь дисперсии и СКО — это настолько простая вещь, что многие ее забывают.
М.о. и дисперсия являются так называемыми моментными оценками случайной величины (используется аппарат математических моментов). Моменты бывают начальными и центральными. Центральные моменты ищутся после исключения систематической составляющей из закона распределения. Такие законы распределения называют центрированными (их м.о. равно нулю).
k
Начальный момент k-го порядка: νk = M ( x ) =
+∞
k
x ⋅ρ( x )dx .
∫
−∞
+inf
Центральный момент k-го порядка: μ k =
∫ (x − M [x ])k ⋅ρ( x )dx .
−inf
С точки зрения аппарата моментов, м.о. — начальный момент 1-го порядка,
дисперсия — центральный момент 2-го порядка.
Третий центральный момент характеризует асимметрию закона распределения (когда один спад кривой крутой, а другой пологий). Используют не сам мо-
24
мент, а так называемый коэффициент асимметрии S k :
Sk =
μ3
.
σ3
Четвертый центральный момент характеризует протяженность спадов распределения. На практике применяют коэффициент эксцесса ε , указывающий
тип вершины распределения (острая, круглая, плоская):
ε =
μ4
σ4
.
Однако, коэффициент эксцесса имеет размерность от 1 до ∞ для различных
законов распределения, поэтому бо́льшее применение нашел коэффициент
контрэксцесса, изменяющийся от 0 до 1:
χ =
1
.
√ε
В дальнейшем под случайной погрешностью будем понимать именно центрированную случайную величину, а систематическую погрешность будем считать
м.о. общей погрешности.
Основные законы распределения перечислены ниже.
1) Равномерное, оно же равновероятное распределение.
25
0, x < a ;
ρ( x) =
{
1
, a ≤ x ≤ b;
b−a
0, x > b .
Равномерному распределению подчиняются: неисключенные систематические погрешности, погрешность квантования в цифровых приборах, погрешность округления при расчетах, погрешность отсчета по шкалам аналоговых
приборов, погрешность трения в стрелочных приборах с креплением подвижной части на кернах и подпятниках (магнитоэлектрические измерительные механизмы), погрешность определения момента времени для каждого конца временного интервала в цифровых хронометрах и частотомерах, температурные
погрешности окружающей среды для приборах в лабораторных или цеховых
условиях (начало смены — 20° С, конец смены — 24° С).
b− a
Дисперсия равномерного распределения: D[ x] =
.
√ 12
a
СКО центрированного равномерного закона с шириной ±a : σ [x ] =
.
√3
Является ограниченным распределением. Вероятность того, что погрешность
примет значение, превышающее предельное, равна нулю.
2) Трапецеидальное.
26
Общий случай вероятностной суммы двух независимых равномерно распределенных случайных величин.
Это распределение является ограниченным.
3) Треугольное, оно же распределение Симпсона.
Вероятностная сумма двух независимых и равномерно распределенных СВ с
одинаковой шириной, частный случай трапецеидального распределения.
Подробнее
про
вероятностное
суммирование
и
интеграл
свёртки:
https://en.wikipedia.org/wiki/File:Convolution_of_box_signal_with_itself2.gif
Этому распределению подчиняются: колебания напряжения питания переменным током от сети; определение интервала времени в цифровых частотомерах и хронометрах; зазор/натяг в механике, если допуски деталей (отверстия и
вала) одинаковые.
Это распределение является ограниченным.
4) Арксинусоидальное.
27
Пусть имеется неслучайная гармоническая величина X (t ) = X m sin ω t , отсчеты которой производятся в случайные равномерно распределенные моменты
времени. Тогда эти отсчеты будут подчиняться арксинусоидальному распределению с плотностью
ρ( x) =
1
π √ X 2m −x 2
.
Самым ярким примером арксинусоидально распределенной погрешности является погрешность от наводки промышленной сети 50 Гц на любые электрические измерения.
Это распределение является ограниченным.
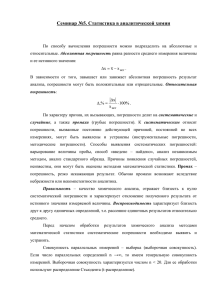
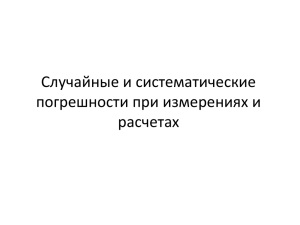
5) Экспоненциальное. Семейство экспоненциальных распределений очень
широко, описывается единой аналитической моделью, зависящей только от одного параметра α :
x−M [x ]
α
ρ( x) =
⋅exp −
2⋅λ⋅σ [ x]⋅Γ(1/α)
λ⋅σ [x ]
(|
α
|),
28
где λ=
√
Γ(1 /α )
,
Γ(3 /α)
σ [x ] - СКО,
M [x ] — математическое ожидание;
Γ( х) — гамма-функция, обобщающая понятие факториала на область дей-
ствительных и мнимых значений аргумента.
При разных значениях параметра α мы получаем равномерное, трапецеидальное, нормальное распределение, распределение Лапласа. В рамках модели
экспоненциального распределения не могут быть описаны двухмодальные распределения, а так же уплощенные распределения типа «шапо».
Рисунок — экспоненциальное распределение ρ( x) = λ⋅exp(−λ∗x )
29
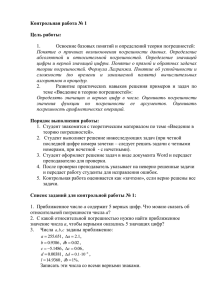
Рисунок — двуэкспоненциальное распределение при α=0.75
6) Нормальное распределение, оно же распределение Гаусса.
2
ρ( x) =
(x − M [ x])
1
⋅exp (−
).
2
σ √2 π
2σ
На графике приведена плотность распределения нормированного нормально-
30
го распределения (подробнее про нормирование распределения см. ниже).
Нормальное распределение считается очень распространенным на практике.
Причина этого сформулирована в центральной предельной теореме теории
вероятностей: если СВ есть вероятностная сумма большого количества независимых СВ (какого угодно закона распределения), и влияние каждой из этих величин на результат пренебрежимо мало, то распределение этой суммы стремится к нормальному. Более того, сумма двух нормальных СВ тоже дает нормальную СВ. В ГОСТ Р 8.736-2011 прописан порядок обработки результатов прямых
многократных измерений, и этот порядок утвержден именно для нормального
распределения. Если на практике полученное распределение противоречит нормальному, то стандарт отсылает читателя к изучению соответствующей методики выполнения измерений (МВИ).
То есть изначально предполагается, что распределение любой случайной погрешности является нормальным, в рамках нашего курса этого вполне достаточно. Таким образом, случайные погрешности в нашем курсе имеют нормальное
распределение, а систематические — равномерное.
Подробнее нормальное распределение рассмотрено ниже.
7) Распределение Стьюдента. Это разновидность нормального распределения. Дело в том, что при небольшом числе измерений (менее 50-ти), закон распределения нормальной СВ начинает зависеть от числа измерений. Говорят, что
нормальное распределение вырождается в распределение Стьюдента при малом
числе измерений. На практике в нашем курсе мы будем иметь дело именно с
распределением Стьюдента.
8) Распределение Коши.
31
ρ(x) =
a
.
π (a + x 2 )
2
Этому закону, например, подчиняется распределение отношения двух нормально распределенных центрированных независимых СВ. Если измерение активного сопротивления производится по закону Ома R = U / I с использованием
источника шумового напряжения, имеющего нормальное распределение, то при
разновременном отсчете U и I их отношение будет иметь распределение Коши
с рядом вытекающих отсюда последствий.
Распределение Коши — это предельный случай распределения Стьюдента.
Внешне кривая плотности этого распределения очень похожа на кривую нормального распределения, но это совсем не так. В частности, распределение
Коши принципиально не имеет дисперсии и м.о. — определяющие эти характеристики интегралы расходятся. То есть чем больше отсчетов будет произведено,
тем больше будет оценка дисперсии результата. Естественно, использовать такую оценку нельзя.
Однако на графическом представлении плотности распределения центр впол-
32
не себе различим. Это говорит о том, что при работе с распределением Коши
нельзя использовать аппарат математических моментов. Оценку центра распределения следует определять как медиану (квантиль уровня 0,5), а оценить разброс экспериментальных данных можно только на основе теории информации и
энтропийного интервала неопределенности. В наш курс рассмотрение положений теории информации не входит.
9) Двухмодальные распределения.
Мо́да — это то значение СВ, которое имеет наибольшую вероятность появления. Распределения типа трапецеидального, равномерного являются безмодальными. Экспоненциальные распределения, распределения Коши и Лапласа —
одномодальные. Существует ряд двухмодальных распределений, причем они
бывают как островершинные (а), так и кругловершинные (б). Подобное распределение имеют погрешности от механического гистерезиса упругих элементов
приборов и датчиков, а так же температурные погрешности приборов, работающих весь год на открытом воздухе — значения температур атмосферного воздуха изучались на протяжении сотен лет и являются достаточно устойчивыми как
для разных лет, так и для различных географических пунктов. Температурные
распределения, как правило, являются несколько асимметричными двухмодальными.
33
3.3 Параметры законов распределения случайных величин и их оценки.
Для того, чтобы точно определить параметры законов распределения (дисперсию и м.о., например), требуется, как это видно из определяющих их интегралов, бесконечное число измерений. В реальности число измерений всегда конечно, поэтому мы вынуждены оперировать оценками этих параметров, полученными по какому-то конечному числу измерений. В результате эти оценки
имеют вероятностную природу, и эта природа тем сильнее, чем меньше измерений было проведено.
Случайная величина (СВ)
Стохастическая
Закон распределения СВ
Детерминированный
Параметр закона распределения СВ
Детерминированный
Оценка параметра закона распределения СВ
Стохастическая
Если оценка сама по себе является случайной величиной, то у нее имеются
свои м.о. и дисперсия. Оценка называется несмещенной, если математическое
ожидание оценки равно оцениваемому параметру. Чем меньше дисперсия конкретной оценки среди других оценок, тем больше ее эффективность. На практике обычно требуют использования только состоятельных оценок. Оценка называется состоятельной, если при n→∞ она стремится по вероятности к оцениваемому параметру. Например, если дисперсия несмещенной оценки при n→∞
стремится к нулю, то такая оценка оказывается и состоятельной.
В рамках теории вероятностей доказано, что эффективность оценок центра
распределения различается для различных законов распределения. Ниже приведен список оценок центра с указанием их эффективности, а так же оценки разброса СВ.
n
1) Среднее арифметическое X̄ = 1 ∑ X i является самой эффективной оцен-
n
i=1
кой центра для нормального распределения. Именно поэтому среднее арифметическое принимают за действительное значение измеряемой величины в случае многократных равноточных измерений согласно ГОСТ Р 8.736-2011.
34
2) Медиана X 0,5 (квантиль уровня 0,5) является самой эффективной оценкой
центра островершинных распределений;
3) Центр размаха X разм =
X min + X max
является самой эффективной оценкой
2
центра ограниченного распределения (равномерного, трапецеидального, треугольного, арксинусоидального, дискретного двузначного и т. д.);
4) Оценкой разброса СВ относительного своего центра является средняя
квадратическая погрешность (СКП) S =
√
( X i− X̄ )2
∑ n−1 . Таким образом, СКП
i=1
n
характеризует разброс каждого измерения из серии относительно математического ожидания СВ.
5) Так как среднее арифметическое является вероятностной оценкой м.о., то
нам нужно знать разброс этой оценки относительно математического ожидания.
Характеристикой этого разброса является среднеквадратическая погрешность среднего арифметического S X̄ = S =
√n
√
( X i− X̄ )2
∑ n (n−1) .
i=1
n
СКП среднего арифметического наглядно показывает достоинство многократных равноточных измерений — точность усредненного результата растет в √ n
раз с каждым проведенным измерением. Однако, этот подход имеет свои ограничения — в частности, суммируемые случайные погрешности должны быть
независимы.
Важно понимать разницу между параметром закона распределения, для определения которого требуется бесконечное число измерений, и оценкой параметра:
35
Идеальный параметр
Реальная оценка
Математическое ожидание M [x ]
Среднее арифметическое X̄ ,
медиана X¯0,5 ,
центр размаха X ¯разм
Среднее квадратическое отклонение σ Среднеквадратическая погрешность S
Оценки случайных погрешностей делят на следующие виды:
1) Точечная оценка это оценка, параметра закона распределения СВ, то есть
оценка, выраженная одним числом. К точечным оценкам относят среднее арифметическое X̄ , среднюю квадратическую погрешность S (СКП), среднюю
квадратическую погрешность среднего арифметического S X̄ , медиану X 0.5 ,
центр размаха X разм и т.д. Такие оценки используют, когда нужно отдельно указать систематическую и случайную погрешность (для эталонов и высокоточных
средств измерения), либо когда будет проводиться дальнейшая обработка результатов. Их основная особенность — вероятностная природа; чем меньше
проведено измерений, тем сильнее она проявляется.
2) Предельной оценкой называют наибольшее возможное значение случайной погрешности. Такая оценка правомерна только для ограниченных распределений. Для неограниченных распределений такая оценка используется редко:
для нормального закона в соответствии с «правилом трех сигм» в качестве предельной оценки иногда используют тройное значение СКП (см. соответствующий раздел теории вероятностей). Главным недостаток предельных оценок —
бессмысленность их арифметического суммирования, итоговая погрешность в
результате будет превышать действительную в несколько раз.
3) Доверительная (она же интервальная или квантильная) оценка — это задание значения погрешности с заданной доверительной вероятностью P ДОВ
как границы доверительного интервала , на протяжении которого встречается
P ДОВ всех значений погрешности, а 1 − P ДОВ значений находятся за границами
интервала. Эти оценки находят широкое применение. Они основываются на понятии квантиля закона распределения (опять-таки, см. соответствующий раздел
36
теории вероятностей). Между квантилями X 0,025 и X 0,975 находится 95% всех возможных значений СВ, то есть
d 0,95 = X 0,975 − X 0,025 ,
где d 0,95 — интерквантильный (доверительный) интервал. На протяжении доверительного интервала ±Δ X ДОВ = ±d ДОВ /2 встречается P ДОВ всех значений погрешности.
Таким образом, эта оценка представляет собой некий интервал с указанием
вероятности того, что истинное значение находится внутри этого интервала.
Эта вероятность тоже носит название доверительной. Наиболее часто применяются уровни доверительной вероятности 0,9; 0,95 (рекомендация действующего
ГОСТ); 0,99; 0,9973 (правило трех сигм); 0,999. Обозначается это как
X изм = X ± Δ X дов , P = Pдов . В случае несимметричных доверительных интервалов
P(X н ≤ X ≤ X в ) = Pдов . То есть для задания доверительной оценки требуется
указать доверительную границу погрешности и доверительную вероятность
попадания истинного значения в интервал.
4) Энтропийные оценки основываются на положениях теории информации и
в нашем курсе не рассматриваются.
Связь точечной оценки разброса и доверительного интервала выражается
следующей формулой:
Δ X (P ДОВ ) = t ⋅ S X̄ ,
где t — коэффициент, который в общем случае зависит от вида закона распределения СВ, от выбранного уровня доверительной вероятности Pдов и от
числа измерений n , причем зависимость от закона распределения СВ является
очень сильной: при разных законах распределения погрешностей может получиться так, что погрешность с меньшей СКП можен принимать бо́ льшие значе-
37
ния.
В случае небольшого (менее 50) числа измерений нормально распределенной СВ этим коэффициентом является квантиль распределения Стьюдента t P , n
(коэффициент Стьюдента).
3.4 Проверка принадлежности результатов измерений нормальному распределению
Еще раз повторим, что переход от точечной оценки погрешности к доверительной требует знания закона распределения. Предполагается, что случайные
погрешности распределены нормально, но все-таки действующие государственные стандарты требуют проверки этого предположения. При этом процедура
проверки гипотезы о принадлежности результатов измерений нормальному распределению различается в зависимости от числа измерений:
1) при числе измерений менее 15 провести эту проверку не представляется
возможным. Вычисление доверительных границ с использованием квантилей
распределения Стьюдента возможно только в случае, когда заранее известно,
что результаты измерений распределены нормально. Если в этом нет уверенности, то государственный стандарт отсылает экспериментатора к методике проводимых
измерений
(МВИ).
Но
есть
еще
один
способ
определить
доверительную границу погрешности, и основывается он на особенности
уровня доверительной вероятности 0,9 (см. ниже).
2) При числе измерений от 15 до 50 предпочтительным является использование составного критерия из приложения Б стандарта ГОСТ Р 8.736-2011.
3) При числе измерений большем 50 для проверки принадлежности результатов измерения нормальному распределению используют критерий χ 2 Пирсона
или критерий ω2 Мизеса-Смирнова (приложение Г указанного стандарта).
Примечание: критерий χ 2 Пирсона входит в число экзаменационных вопро-
38
сов. Студентам этот критерий должен быть известен из курса теории вероятностей.
3.5 Еще несколько слов о нормальном распределении.
Наличие большого количества нормально распределенных СВ требует наличия удобного математического аппарата, которым можно проанализировать
любую из этих величин вне количественной зависимости от ее СКО или м.о.
Поэтому нормальное распределение «приводят к общему знаменателю» или,
выражаясь более формально, это распределение нормируют. Плотность распределения нормированного нормального распределения имеет вид:
ρ(t) =
где t =
1
t2
⋅exp(− ),
2
√2 π
x−M [ x ]
— нормированный параметр нормального распределения.
σ [x ]
Таким образом, нормированное нормальное распределение имеет нулевое
м.о. и единичное СКО ( M [t ] = 0, σ [t ] = 1 ). Это распределение удобно тем, что
все требуемые интегралы для этого распределения давным-давно посчитаны
(причем численно) и табулированы (занесены в таблицы мат статистики).
О каких интегралах идет речь? Часто требуется определить вероятность попадания нормально распределенной СВ в заданный интервал или решить обратную задачу: определить интервал, в который нормально распределенная СВ попадет с заданной вероятностью. Такие задачи возникают при определении доверительных границ погрешности (чем студенты в этом курсе тоже будут заниматься), и решаются с использованием упомянутого выше свойства плотности
распределения, а именно: вероятность попадания случайной величины в интервал есть определенный интеграл от плотности вероятности по границам этого
интервала:
39
b
∫ ρ(x) dx .
P(a ≤ x ≤ b) =
a
В случае нормального распределения этот интеграл принимает вид:
b
P(a ≤ x ≤ b) =
2
(x − M [x ])
∫ σ √12 π⋅exp(− 2σ 2 ) dx .
a
Здесь самое время нормировать нашу плотность распределения:
x−M [ x ]
P(a ≤ x ≤ b) = t =
= P(t н ≤ t ≤t в ) =
σ
|
|
tв
2
1
t
∫ √2 π⋅exp (− 2 ) dt .
t
н
Возможны два варианта развития событий: задан симметричный или несимметричный доверительный интервал. В первом случае:
t гр
P(t н ≤ t ≤t в ) = P (−t гр ≤ t ≤+t гр) = 2⋅P (0 ≤ t ≤+t гр ) =
t
2
2
t
exp(− ) dt .
∫
2
√2 π 0
2
2
t
exp (− ) dt носит название интеграла вероятности, и
∫
2
√2 π 0
Интеграл P(t) =
значения этого интеграла приведены в таблице 1 приложения 2 учебника Эрастова.
Для несимметричного доверительного интервала задача решается следующим образом:
tв
P(t н ≤ t ≤t в )
1
t2
=
∫ exp (− 2 ) dt =
√2 π t
= Φ(t в ) − Φ (t н ) ,
н
t
tв
tн
1
t2
1
t2
∫ exp (− 2 ) dt− √ 2 π −∞
∫ exp(− 2 ) dt =
√2 π −∞
2
где Φ (t) = 1 ∫ exp(− t ) dt — интегральная функция нормированного
2
√2 π −∞
нормального распределения. Эта функция определяет вероятность попадания
нормированной нормальной СВ в промежуток от минус бесконечности до заданного значения нормированного параметра t и табулирована (занесена в таблицы математической статистики.).
Таким образом, при решении задачи о попадании нормально распределенной
40
СВ в интервал следует пользоваться указанными выше таблицами математической статистики.
3.6 Особенности уровня доверительной вероятности 0,9.
Среди различных произвольно назначаемых значений уровня доверительной
вероятности есть одно, обладающее уникальным свойством. Оказывается, что
кривые интегрального закона распределения СВ для широкого класса законов
распределения (равномерного, треугольного, трапецеидального, нормального,
ряда экспоненциальных и двухмодальных с небольшой глубиной антимодальности) в области квантилей 0,05 и 0,95 пересекаются в очень узком интервале
значений X = 1,6 σ ± 0,05 σ . Поэтому с погрешностью в 0,05 σ можно считать,
что значение погрешности Δ X случ (P ДОВ = 0,9) = 1,6 S X̄ для любых из этих распределений является границей доверительного интервала с 90%-й доверительной
вероятностью. В отсутствие данных о законе распределения СВ определение
доверительной границы является возможным именно для уровня доверительной
вероятности 0,9:
Δ X случ (P ДОВ = 0,9) = ±1,6 S X̄ = ±1,6
S
.
√n
41
4 Суммирование погрешностей
4.1 Введение.
При проведении измерений задача суммирования составляющих погрешностей возникает практически всегда. Наиболее распространенные случаи суммирования погрешностей:
1) если результат измерения исправлялся, то необходимо оценить границы
НСП и добавить их к инструментальной погрешности;
2) если измерения производились в условиях, отличных от нормальных для
данного СИ, то возникающую дополнительную погрешность необходимо оценить и добавить к основной;
3) если производилось косвенное измерение ФВ, то погрешность каждого измеряемого аргумента повлияет на погрешность функции с учетом правил определения погрешности косвенного измерения, но все равно каждую из этих составляющих придется суммировать с другими;
4) в измерительных установках необходимо оценить погрешности всех ис-
42
пользуемых приборов, погрешности измерительных каналов, погрешности их
влияний и наводок друг на друга и т. д.;
5) в ИИС необходимо учитывать погрешности каждого измерительного преобразователя, входящего в измерительный канал, а так же наводки от других каналов, внешних факторов и т.д.
Таким образом, задача расчетного суммирования погрешностей — одна из
основных задач как при создании СИ, так и при оценке погрешностей результатов измерений.
4.2 Трудности расчетного суммирования погрешностей
Трудность расчетного суммирования погрешностей состоит в том, что все составляющие погрешности должны рассматриваться как случайные величины
(СВ). С точки зрения теории вероятностей, как было уже сказано, СВ наиболее
полно описывается своим законом распределения, а совместное действие
нескольких СВ будет описываться соответствующим многомерным законом
распределения. В такой постановке задача очень быстро набирает сложность,
становясь практически неразрешимой для 3 – 4 составляющих, не говоря уже о
30 – 40. Поэтому практический путь решения задачи суммирования погрешностей состоит в том, чтобы вместо определения многомерных законов распределения подобрать для характеристик составляющих погрешности такие числовые оценки (например, среднее арифметическое, СКО, коэффициент контрэксцесса), оперируя с которыми можно было бы определить соответствующие числовые оценки погрешности без определения результирующих многомерных законов распределения рассматриваемых СВ.
Внимание: при суммировании производятся математические операции над
оценками параметров закона распределения СВ; в нашем курсе это предельное
значение погрешности для равномерного распределения и СКО.
43
Правила суммирования погрешностей основываются на том предположении,
что погрешность по абсолютному значению всегда меньше измеряемой величины. Фактически, это говорит о том, что измерение было проведено исправным, поверенным СИ и квалифицированным оператором в адекватных условиях окружающей среды.
Но даже в такой постановке это достаточно сложная математическая задача,
требующая большого количества расчетов, поэтому обычно этот подход используется только при метрологических измерениях.
4.3 Суммирование погрешностей в метрологических измерениях
При проведении метрологических измерений необходимо учитывать, что:
1) числовые характеристики законов распределения составляющих СВ могут
не оставаться постоянными при изменении измеряемой величины, т. е. они могут меняться в диапазоне ее измерения;
2) отдельные составляющие погрешности могут быть влиять друг на друга
(выражаясь более формально, они могут быть коррелированы между собой);
3) при суммировании СВ их законы распределения существенно деформируются.
Учитываются эти сложности, например, следующими способами:
1) изменение погрешности в функции от изменения значений самой измеряемой величины учитывается самым простым способом, а именно разделением
погрешности на аддитивную и мультипликативную составляющие. Далее делается предположение, что сумма аддитивных составляющих даст значение аддитивной части результирующей погрешности, а сумма мультипликативных составляющих — мультипликативную.
В пределах диапазона изменения измеряемой величины не более десятикратного изменение результирующей погрешности может быть с достаточной
44
точностью представлено линейной функцией. Поэтому достаточно найти значения результирующей погрешности лишь в начале и в конце такого диапазона, а
потом описать результирующую погрешность двучленной формулой. При
диапазоне изменения измеряемой величины больше десятикратного можно разбить итоговый диапазон на участки, и результирующая погрешность может
быть определена в начале и в конце каждого участка.
2) Учет корреляционных связей между суммируемыми составляющими
производится путем использования различных правил суммирования для сильно и слабо коррелированных составляющих.
3) Для устранения влияния деформации формы законов распределения при
суммировании погрешностей все суммируемые составляющие исходно представляются своими СКО, и все операции расчетного суммирования производятся только над этими средними квадратическими значениями.
Чаще всего результирующую погрешность желательно выразить не в виде
СКО, а в виде некоторого интервала неопределенности (доверительного или энтропийного). Этот переход является самым трудным с теоретической точки зрения, поскольку конкретный вид формулы перехода зависит от формы закона
распределения результирующей погрешности, а излагаемая методика была изначально нацелена на то, чтобы обойтись без точного определения
результирующего закона распределения суммы всех составляющих.
Наиболее строго, без каких-либо допущений эта задача решается методами
теории информации с использованием энтропии по Шеннону и энтропийного
интервала неопределенности.
Для перехода от СКО к доверительному интервалу необходимо тем или иным
образом вынести суждение о форме закона распределения случайной погрешности и тем самым выбрать значения квантильного множителя t P , n .
Более подробно об этих и других сложностях, а также методах их устранения
45
см. соответствующие МВИ.
4.4 Суммирование погрешностей при проведении технических измерений
При проведении технических измерений расчеты ведут с некоторыми упрощениями согласно ГОСТ Р 8.736-2011.
В конечном итоге, задача суммирования погрешностей сводится к нескольким подзадачам:
1) определение суммарной систематической составляющей;
2) определений суммарной случайной составляющей;
3) определение общей погрешности результата измерений.
4.5 Суммирование систематических погрешностей известного знака
В случае, когда все составляющие систематической погрешности определены
по знаку и по величине, суммарная погрешность находится алгебраическим суммированием. Фактически, речь идет о суммарной поправке к результату измерения:
n
Δ X ∑ попр =
∑ Δ X i попр .
i=1
46
Эта поправка должна быть исключена из результата измерения.
Пример: при измерении фазового сдвига RC-цепочки фазометром Ф2-1 получен фазовый угол ϕ изм = + 49° . Методическая погрешность, вызванная конечным входным сопротивлением фазометра, оценена как
Δ ϕ мет, R = +0,220 ° .
Методическая погрешность, вызванная ненулевой входной емкость фазометра, оценена как
Δ ϕ мет,С = −1,228 ° .
Итоговая поправка к результату:
Δ ϕ ∑ попр = −Δ ϕ∑ мет = −(+ 0,220 ° + (−1,218 °)) = + 0,998° .
Исправление результата: ϕ испр = ϕ изм + ϕ ∑ попр = +49 ° +0,998 ° = 49,998 ° .
4.6 Суммирование систематических погрешностей неизвестного знака
Если же отдельные составляющие систематической погрешности представлены границами интервалов погрешностей без информации о знаке (например,
НСП) то в отсутствии информации о законе распределения систематической
погрешности ее распределение принимают равномерным, а суммарную границу
определяют геометрическим суммированием с учетом деформации закона распределения:
√
Θ∑ (P ДОВ ) = ±K (P ДОВ )⋅
где
Θi
— i-я
составляющая
n
∑ Θ2i ,
(4.1)
i=1
НСП,
подлежащая
суммированию,
K (P ДОВ ) — коэффициент, определяемый принятой доверительной вероятно-
стью P ДОВ , числом составляющих НСП и их количественным соотношением
между собой. Этот коэффициент учитывает деформацию закона распределения
при суммировании нескольких равномерно распределенных погрешностей (на-
47
пример, сумма двух одинаковых равномерно распределенных СВ дает
треугольное распределение; сумма двух разных равномерно распределенных
СВ имеет трапецеидальное распределение, и т.д.).
Таким образом, систематические погрешности неизвестного знака суммируются геометрически с учетом деформации закона распределения.
Эта формула справедлива для погрешностей, выраженных как в абсолютной,
так и в относительной форме:
n
√∑
δ X сист , ∑ ( P ДОВ ) = ±K (P ДОВ )⋅
i=1
δ X сист,i .
2
(4.2)
Для доверительной вероятности 0,95 этот коэффициент очень слабо зависит
от числа составляющих НСП и их соотношения, поэтому его значение можно
принять равным 1,1. Для доверительной вероятности 0,99 и при числе
суммируемых составляющих более 4-х значение коэффициента принимают 1,4.
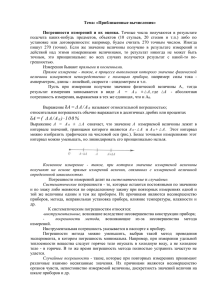
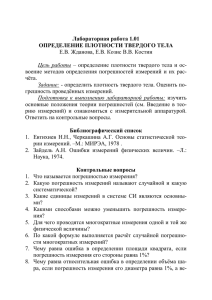
Если же число суммируемых равно четырем или менее, то коэффициент
определяют по графику зависимости K (P ДОВ )=f (n , l) , приведенном на рисунке,
Θ
где ось абсцисс соответствует соотношению l = Θ1 . Кривая 1 соответствует
2
двум суммируемым составляющим ( n = 2 ), кривая 2 — n = 3 , кривая 3 —
n = 4. Значение коэффициента определяется по оси Y. Все значения коэффици-
ента в графике заданы для P ДОВ=0,99 .
При трех или четырех суммируемых составляющих за Θ1 принимают составляющую, наиболее отличающуюся от других по числовому значению, а за Θ2
— ближайшую к Θ1 .
48
Студентам разрешается (и, в общем-то, требуется) пользоваться усредненными значениями коэффициента K (P ДОВ ) , не зависящим от числа слагаемых и
их соотношения:
Таблица 4.1
P ДОВ
0,9
0,95
0,98
0,99
K (P ДОВ )
0,95
1,1
1,3
1,4
При малом числе составляющих после нахождения Θ∑ ( P ДОВ ) необходимо
сравнить ее с арифметической границей:
n
Θ*∑ = ± ∑|Θi| .
(4.3)
i=1
Ясно, что вероятностная сумма Θ∑ (P ДОВ ) не может быть больше арифметиче*
ской Θ*∑ . Если Θ∑ (P ДОВ ) > Θ∑
, то в качестве границ суммарной систематиче-
ской погрешности принимается меньшая величина, то есть Θ*∑ в данном слу-
49
чае.
Так как суммирование НСП производится по вероятностным правилам, то искомая сумма Θ∑ ( P ДОВ ) является случайной величиной, поэтому мы можем ввести понятия СКО суммарной систематической погрешности. Принимая распределение НСП равномерным, получаем:
SΘ =
Θ∑ (P ДОВ )
K (P ДОВ ) √ 3
.
(4.4)
Эта формула говорит о том, что СКП равномерно распределенной СВ в √ 3
раз меньше ее предельной границы.
Если составляющие НСП представлены своими доверительными границами с
разной доверительной вероятностью P ДОВ , i , то необходимо привести результат
измерения к одной доверительной вероятности. В этом случае используется
формула:
n
√∑(
Θ∑ (P ДОВ ) = ±K (P ДОВ )⋅
i=1
Θi (P ДОВ , i) 2
.
K i (P ДОВ ,i )
)
(4.5)
4.7 Пример суммирования систематических погрешностей. Нормирование
дополнительной погрешности СИ.
Для примера рассмотрим суммирование основной и дополнительной погрешности СИ. Дополнительная погрешность возникает при выходе внешней влияющей величины за границы нормальных условий и нормируется отдельно от
основной. Нормировать дополнительную погрешность могут как простым числом, так и зависимостью дополнительной погрешности от влиящего фактора. В
последнем случае такую зависимость называют функцией влияния. Функция
влияния может быть как линейной, так и нелинейной.
Для линейной функции влияния зависимость дополнительной погрешности
от влияющего фактора определяется по следующим формулам для абсолютной и относительной погрешности соответственно:
50
В − Вн . у .
Θдоп = ± Θосн⋅K вл⋅ изм
Bнорм
(4.6)
или
δ X доп = ± δ X осн⋅K вл⋅
Визм − Вн . у.
.
B норм
(4.7)
Здесь приняты следующие условные обозначения:
K вл — коэффициент влияния внешней величины на погрешность;
В изм — влияющая величина в момент измерения;
В н . у . — влияющая величина в начальных условиях;
B норм — нормирующее значение влияющей величины.
Предположим, что измерено значение тока 6,17 мА . По классу точности прибора определена погрешность измерения: ±0,015 мА . В техническом описании
амперметра сказано, что дополнительная температурная погрешность не превышает половины основной при изменении температу ры на 10° С. Также необходимо уточнить рабочий диапазон прибора (в данном случае рабочий температурный диапазон). Пусть, например, он составит от 10° С до 30° С. Измерение
произведено при температуре 37° С. Зная это, можно определить дополнительную погрешность прибора по формуле (4.6) следующим образом:
t − t н . у.
1 37 ° C − 30° C
Θдоп = ± Θосн⋅K вл⋅ изм
= ±0,015 мА⋅ ⋅
= ±0,00525 ° C
t норм
2
10° C
Теперь определим полную погрешность измерения, задавшись доверительной вероятностью 0,95 (выбор уровня P ДОВ предоставляется экспериментатору,
или же эта вероятность явно указана в МВИ или в условии задачи) и определив
соответствующий коэффициент из таблицы 4.1, воспользовавшись формулой
(4.1):
Θ∑ (P ДОВ ) = ± K (P ДОВ)⋅√Θ2осн + Θ2доп = ± 1,1⋅√ 0,0152 + 0,00525 2 = ± 0,01748 мА .
Определим арифметическую сумму погрешностей:
51
*
Θ∑ = ±|0,015 + 0,00525| = ± 0,02025 мА .
За итоговую границу принимается меньшее значение погрешности:
I изм = 6,17 мА ± 0,017 мА , P ДОВ = 0,95 .
Обратите внимание, что результат округлен, а также указана доверительная
вероятность попадания истинного значения тока в доверительные границы погрешности.
4.8 Пример суммирования НСП, заданных доверительными интервалами
с разной доверительной вероятностью.
Пусть имеется два доверительных интервала систематической погрешности
Θ1 (P ДОВ , 1) = ± 1 мА и Θ2 (P ДОВ , 2) = ± 2 мА , заданных для разных доверительных
вероятностей P ДОВ , 1 = 0,95 , P ДОВ , 2 = 0,99 . Требуется определить суммарную
доверительную границу систематической погрешности для вероятности 0,95.
Так как мы не имеем права суммировать доверительные интервалы, заданные
для разной доверительной вероятности, то от доверительных границ погрешностей перейдем к предельным. Для этого по таблице 4.1 необходимо определить
коэффициент, для которого была вычислена соответствующая доверительная
граница.
*
Θ1 =
*
Θ2 =
Θ1 ( P ДОВ ,1)
1 мА
=
= 0,90909 мА ,
K (P ДОВ ,1)
1,1
Θ2 (P ДОВ ,2 ) 2 мА
=
= 1,42857 мА .
K ( P ДОВ ,2)
1,4
Теперь можно воспользоваться формулой (4.1) и определить суммарный доверительный интервал:
2
2
Θ∑ (P ДОВ ) = ±1,1⋅√(0,90909 мА) + (1,42857 мА ) = ±1,86263 мА .
Также эту задачу можно решить, напрямую воспользовавшись формулой
(4.5):
52
√
Θ∑ (P ДОВ ) = ±1,1⋅ (
1 мА 2
2 мА 2
) +(
) = ± 1,8626 мА .
1,1
1,4
4.9 Суммирование случайных погрешностей.
Суммирование случайных погрешностей требует знания оценок СКО каждой
составляющей погрешности, а также знания коэффициента корреляции между ними (по поводу того, что такое коэффициент корреляции, см. соответствующий раздел теории вероятностей).
В общем случае случайные погрешности суммируют, руководствуясь следующей формулой:
S∑ =
√
n
n
i=1
i≠ j
∑ S 2i + 2 ∑ r i , j S i⋅S j ,
(4.8)
где S i — СКП i -й составляющей;
r i , j — коэффициент корреляции между i -й и j -й составляющей.
Таким образом, случайные погрешности суммируются геометрически с учетом корреляции.
Определение точного значения коэффициента корреляции является достаточно сложной задачей, требующей большого количества измерений. Обычно
точное значение r i , j определяют только в метрологических измерений.
В технических же измерениях используют только три значения коэффициен та корреляции: −1 , 0 , +1 , причем уровень
r i , j = ±1 соответствует сильной
(жесткой) корреляции, а уровень r i , j = 0 называют слабой корреляцией. Как
указывалось выше, границей между сильной и слабой корреляцией считают
уровень, когда мощность измерительного сигнала равна мощности помехи,
r ГР = ± √ 0,5 ≈ 0,707 . Соответственно, если значение метрологического коэффи-
циента корреляции меньше, чем уровень 0,707 , то в технических измерениях
этот коэффициент принимают равным нулю. При превышении уровня 0,707 ко-
53
эффициенту присваивается значение +1 или −1 .
Если же коэффициент корреляции неизвестен из предварительного проведенного метрологического исследования и не задан в МВИ, то при проведении
измерений следует просмотреть источники погрешности на предмет логической взаимосвязи между собой. Например, колебания температуры в цехе приведут к аналогичным колебаниям температуры всех приборов и линий связи в
этом цехе, поэтому корреляция дополнительных температурных погрешностей
жесткая и положительная, r = +1 . Если среди случайных погрешностей не обнаружено логической взаимосвязи, то их следует считать некоррелированными, и для них r = 0 .
У суммирования жестко коррелированных погрешностей есть свои очевидные особенности. Рассмотрим их на примере суммирования двух составляющих.
Для положительной жесткой корреляции:
S∑ =
√S
2
1
+ S22 + 2⋅(+1)⋅S 1⋅S 2 =
√S
2
1
+ 2 S 1 S 2 + S 22 =
√( S
+ S 2)2 = S1 + S 2 .
√( S
− S2 ) = |S1 − S 2| .
1
Для отрицательной жесткой корреляции:
S∑ =
√S
2
1
2
√S
+ S2 + 2⋅(−1)⋅S 1⋅S 2 =
2
1
2
− 2 S1 S 2 + S 2 =
2
1
Таким образом, суммирование жестко коррелированных составляющих случайной погрешности ведется алгебраически с учетом знака коэффициента корреляции между ними. Некоррелированные составляющие суммируются геометрически:
S∑ =
√S
2
1
2
+ S2 + 2⋅(0)⋅S1⋅S 2 =
2
1
√S
2
+ S2 .
Все вышеприведенные формулы справедливы для погрешностей, выраженных как в абсолютной, так и в относительной форме.
Если случайные погрешности представлены доверительными интервалами с
разной доверительной вероятностью, то сначала находят СКП отдельных со-
54
ставляющих, а затем определяют СКП по общим правилам:
Si =
Δ X ДОВ i ,случ
.
t P ,n , i
(4.9)
4.10 Пример суммирования погрешностей, заданных своими СКП.
Рассмотрим суммирование случайных погрешностей на примере. Пусть проведенное измерение содержало пять различных источников случайных погрешностей, оцененных своими СКП: S 1 = 6,18 Ом , S 2 = 5,14 Ом , S 3 = 9,33 Ом ,
S 4 = 6,76 Ом , S 5 = 7,79 Ом . Известна сильная положительная корреляция меж-
ду первым и вторым источником погрешностей, а также между вторым и четвертым. Также задана сильная отрицательная корреляция между первым и третьим источником погрешности, а также между четвертым и пятым. Все остальные погрешности можно считать некоррелированными. Требуется найти суммарную СКП.
Для начала запишем коэффициенты корреляции:
r 1,2 = + 1 ,
r 2,4 = +1 ,
r 1,3 = −1 , r 4,5 = −1 .
Теперь воспользуемся формулой (4.8) для поиска суммарной СКП:
S∑
=
√S
2
1
2
2
2
2
+ S 2 + S3 + S 4 + S 5 + 2 r 1,2 S 1 S2 + 2 r 2,4 S2 S 4 + 2 r 1,3 S 1 S3 + 2 r 4,5 S 4 S 5 =
= ( 6,182 + 5,14 2 + 9,33 2 + 6,762 + 7,79 2 + 2⋅6,18⋅5,14 + 2⋅5,14⋅6,76 − 2⋅6,18⋅9,33 − .
1 /2
− 2⋅6,76⋅7,79 ) = 13,05 (Ом)
На этом пример суммирования случайных погрешностей закончен.
4.11 Пример суммирования случайных погрешностей, заданных доверительными интервалами с различной доверительной вероятностью
Пусть по результатами 19 измерений получено значение тока I изм = 164,84 мА .
Пусть имеются три различных источников случайной погрешности, заданных
своими
доверительными
интервалами:
Δ I случ , 1( P ДОВ ,1 ) = 3 мА ,
P ДОВ , 1 = 0,95 ,
55
Δ I случ, 2( P ДОВ ,2 ) = 4 мА , P ДОВ , 2 = 0,98 , Δ I случ, 3 (P ДОВ ,3 ) = 5 мА , P ДОВ , 3 = 0,99 . Известно,
что погрешности независимы и распределены нормально. Требуется определить
доверительную границу случайной погрешности для доверительной вероятности P ДОВ = 0,99 .
Так как мы не можем суммировать доверительные интервалы с разными доверительными вероятностями, то в первую очередь нужно перейти к точечным
оценкам разброса (СКП), воспользовавшись формулой (4.9). Для этого нужно
определить квантили распределения Стьюдента для 19 измерений и различных
уровней доверительной вероятности, воспользовавшись соответствующей таблицей математической статистики:
для P ДОВ , 1 = 0,95 , n = 19: t P , n = 2,1009 ,
для P ДОВ , 2 = 0,98 , n = 19: t P , n = 2,5524 ,
для P ДОВ , 3 = 0,99 , n = 19: t P , n = 2,8784 .
Переходим от доверительных границ к СКП и суммируем по общим правилам (формула (4.8)), считая погрешности независимыми:
2
2
3 мА
4 мА
5 мА
S∑ = (
) +(
) +(
) = 2,7409 мА .
2,1009
2,5524
2,8784
√
Определяем итоговый доверительный интервал суммарной случайной погрешности для вероятности 0,99:
Δ I случ, ∑ (P ДОВ ) = 2,8784 ⋅2,74095 мА = 7,88893 мА .
Ответ: I изм = 164,84 мА ± 7,88893 мА ≈ (165 ± 8) мА , P ДОВ = 0,99, n=19 .
4.12 Суммирование случайных и систематических погрешностей.
Иногда после определения полной систематической и полной случайной погрешности измерения на этом обработку результатов измерений останавливают,
и отдельно указывают границы систематической погрешности (в виде НСП) и
56
случайной погрешности (в виде СКП). Такой подход применяется для эталонов
и высокоточных средств измерения.
В остальных случаях приводят единственное значение погрешности результата измерения. Для определения полной погрешности результата необходимо
уметь суммировать случайную и систематическую составляющую погрешности. С точки зрения математики, речь идет о композиции нормально и равномерно распределенных СВ.
Примечание: в данном учебном курсе метрологии суммирование ведется согласно ГОСТ Р 8.736 -2011 с некоторыми упрощениями.
При суммировании случайной и систематической погрешности в первую очередь нужно ответить на вопрос: а нельзя ли проигнорировать одну из состав ляющих? Если одна из погрешностей сильно превышает другую, то влиянием
второй составляющей, очевидно, можно пренебречь. В этом и заключается
упрощение методики суммирования погрешности.
Для ответа на вопрос «можно ли проигнорировать одну из составляющих?»
требуется найти численное значение соотношения некоторых их параметров. В
случае систематической погрешности таким параметром является ее доверительная граница Θ∑ , а для случайной погрешности — S X̄ ∑ . Возможно три случая количественного соотношения между собой двух составляющих общей погрешности в зависимости от соотношения
Первый случай. При значении
Θ∑
.
S X̄ ∑
Θ∑
< 0,8 мы можем проигнорировать систеS X̄ ∑
матическую составляющую погрешности как незначительную в сравнении со
случайной. В этом случае общая погрешность будет равна доверительному интервалу случайной погрешности:
S∑
Δ X ОБЩ = Δ X случ (P ДОВ) = t P ,n⋅S X̄ ∑ = t P , n⋅ .
√n
57
На практике это означает, что измерение проводится достаточно точным СИ,
а разброс измерений вследствие влияния случайных факторов очень высок (или
у нас имеется чрезвычайно диффузный объект измерений).
Второй случай. При значении
Θ∑
> 8 мы можем отбросить случайную соS X̄ ∑
ставляющую погрешность как незначительную в сравнении с систематической.
В этом случае общая погрешность будет равна доверительному интервалу систематической погрешности:
n
√∑
Δ X ОБЩ = Δ X сист ( P ДОВ) = Θ∑ (P ДОВ ) = K (P ДОВ )⋅
i=1
Θ2i .
На этом допущении построены многие МВИ. Дело в том, что S X̄ ∑ =
S∑
, то
√n
есть с увеличением числа измерений мы уменьшаем разброс действительного
значения результата измерений. Таким образом, можно задаться достаточно
большим числом измерений и указать, что все эти измерений должны быть проведены СИ определенного класса точности или выше, после чего смело
проигнорировать случайную погрешность измерений, зная, что она как минимум в 8 раз меньше систематической (например, провести 15 измерений прибором класса точности 0,5 или выше; за результат измерений принять среднее
арифметическое серии измерений; за погрешность результата принять инструментальную погрешность СИ, определенную по его классу точности).
Третий случай. При значении 0,8 ≤
Θ∑
≤ 8 мы не можем проигнорироS∑ X̄
вать ни одну из составляющих погрешностей и вынуждены учитывать их обе
при расчете доверительной границы результата. Расчет производится следующим образом:
Δ X ОБЩ ( P ДОВ ) = K⋅S общ ,
где K — эмпирический коэффициент, определяемый по формуле
58
K =
Δ X сист + Δ X случ
,
SΘ + S X̄ ∑
а S общ — суммарная СКП результата измерения, определяемая как
S общ =
Напоминание: S Θ =
√S
2
Θ
+ S 2X̄ ∑ .
Θ∑ ( P ДОВ )
— СКП суммарной НСП.
K ( P ДОВ )⋅√3
4.13 Пример суммирования систематических и случайных погрешностей.
По результатам прямых многократных равноточных измерений напряжения
было установлено, что среднее измеренное значение напряжения составляет
Ū = 10,191 B , СКП S = 0,6966 B . Измерений было проведено 18, закон распре-
деления случайной погрешности не противоречит нормальному, промахи в измерениях отсутствуют. Измерения проводились цифровым измерителем напряжения класса точности 0,2/0,02 на пределе измерения 20 В. Требуется определить доверительную границу общей погрешности для доверительной вероятности 0,99.
Для начала по классу точности средства измерения определим его основную
погрешность:
δ U = γ K + γH
(
Ū
20 B
−1 = 0,2% + 0,02%
− 1 = 0,21925 % ;
UK
10,191 B
)
Δ U = δ U⋅Ū =
(
)
0,21925 %
⋅10,191 B = 0,0223438 B .
100 %
Ищем среднюю квадратическую погрешность результата измерения:
S Ū =
S
0,6966 B
=
= 0,16419 B .
√n
√18
Проверяем, имеется ли возможность проигнорировать одну из составляющих
общей погрешности:
59
Θ = 0,022343 B = 0,13608 .
S Ū
0,16419 B
Как видно, это соотношение меньше граничного значения 0,8. На основании
этого делаем вывод что мы имеем право пренебречь систематической составляющей погрешности, и общая доверительная граница будет определяться только доверительной границей случайно составляющей:
Δ U случ ( P ДОВ ) = t P , n⋅S Ū = 2,5395⋅0,16419 B = 0,4169 B .
Окончательная запись результата измерения:
U изм = 10,2 B±0,4 B , P ДОВ = 0,99, n = 18.
В случае, если мы все же не желаем игнорировать вторую составляющую погрешности, расчет следует вести следующим образом.
Рассчитываем среднюю квадратическую погрешность систематической составляющей:
0,022343 B
SΘ = Θ =
= 0,012899 B .
√3
√3
Рассчитываем общую среднюю квадратическую погрешность результата измерения:
S ОБЩ =
√S
2
Θ
2
+ SŪ =
√(0,012899 B)2 + (0,16419 B)2
= 0,16469 B .
Рассчитываем эмпирический коэффициент K , учитывающий деформацию
закона распределения при суммировании равномерно и нормально распределенных СВ:
K =
Δ X сист + Δ X случ
0,022343 B + 0,4169 B
=
= 2,48035 .
SΘ + S X̄ ∑
0,012899 B + 0,16419 B
Рассчитываем общую доверительную границу погрешности:
Δ U ОБЩ = K ⋅ S ОБЩ = 2,48035⋅0,16469 = 0,40848 B .
Разница между полученными значениями общей погрешности составляет
60
0,40848 B − 0,4169 B
= −0,0206 ;−2,06 % .
0,40848 B
Как видно, погрешность определения погрешности достаточно мала. В данном случае вполне допускается использование упрощенных формул для расчета.
4.14 Алгоритм обработки результатов прямого однократного технического
измерения
Итак, мы провели прямое однократное измерение в рабочих условиях и получили результат измерения X изм , считав его с используемого СИ либо взяв среднее арифметическое от двух или трех измерений (это все еще считается однократным измерением). Теперь для определения погрешности результата предлагается пользоваться следующим алгоритмом.
1) Оценить величину методической погрешности измерения Δ X мет . Ввести
поправку на методическую погрешность (поправочным слагаемым или поправочным множителем), если методическая погрешность соизмерима с основной.
Если методическая погрешность на порядок меньше основной, то ею разрешается пренебречь.
2) По паспорту СИ (по его классу точности) определить размер основной погрешности прибора Θосн .
3) Определить величину дополнительной погрешности Θдоп , вызванной выходом внешних влияющих величин (температура, нелинейные искажения источника сигнала и т. д.) за границы нормальных условий, по формуле (4.6).
4) При необходимости определить величину НСП, вызванной конечной
точностью определения методической погрешности. Учитывать эту погрешность имеет смысл только тогда, когда она соизмерима с основной погрешностью измерения.
61
5) Суммировать все составляющие погрешности: основную, дополнительную, НСП и т. д. согласно правилам суммирования систематических погрешностей: найти доверительную границу погрешности (4.1), найти предельную границу погрешности (4.3), за результат взять наименьшую.
6) Записать результат измерения с указанием доверительной границы погрешности и доверительной вероятности нахождения результата в этих границах:
X = X изм ± Θ∑ , P = P ДОВ .
4.15 Алгоритм обработки результатов прямого многократного технического равноточного измерения
Этот алгоритм описывает, как обработать группу результатов многократного
измерения. Согласно ГОСТ Р 8.736-2011, группой результатов измерений называется не менее четырех измерений одной и той же физической величины,
выполненных с одинаковой тщательностью, одним и тем же средством и методом измерений и одним и тем же оператором. То есть требуется найти результат
измерения X изм и его доверительную границу Δ X ОБЩ , когда имеется выборка отсчетов измеряемой ФВ X 1 , X 2 , … , X n , n≥4 и инструментальная погрешность
СИ Θосн , рассчитанная по паспорту прибора или по его классу точности. Действовать предлагается по следующему алгоритму.
1) Результаты измерений исправляются (вводится поправочное слагаемое или
поправочный множитель), если величина методической погрешности соизмерима с основной.
2) Вычисляют среднее арифметическое значение полученной выборки:
n
X̄ =
1
∑X .
n i=1 i
3) Вычисляют среднюю квадратическую погрешность этой выборки:
62
S =
√
( X i− X̄ )2
∑ n−1 .
i=1
n
4) Отсеивают промахи, воспользовавшись критерием Граббса, основанному
на предположении, что результаты выборки подчиняются нормальному распределению. Для отсеивания промахов проверяют самые далеко удаленные от центра выборки значения, то есть X min и X max . Отклонения этих значений от центра
выборки нормируются и сравниваются с допустимыми отклонениями из таблицы критериев Граббса βтабл :
βmin =
|X min − X̄|
S
, βmax =
X max − X̄
.
S
Если βmin > βтабл , то значение X min признается промахом и исключается из серии измерений. Если βmax > βтабл , то значение X max признается промахом и исключается из серии измерений. В случае, если какие-либо значения были признаны промахами, мы вынуждены возвратиться к пункту 2 данного алгоритма,
так как изменилось число измерений и, соответственно, среднее арифметическое и СКП. Процедуру удаления промахов повторять итеративно, пока не бу дет получено подтверждение, что выборка не содержит промахов.
5) За результат измерения принимается среднее арифметическое выборки без
промахов, X изм = X̄ .
6) Определяется среднеквадратическая погрешность среднего арифметического:
S X̄
S
=
=
√n
√
( X i− X̄ )2
∑ n (n−1) .
i=1
n
7) Проверяют гипотезу о принадлежности результатов измерений нормальному распределению (см. параграф «Проверка принадлежности результатов измерений нормальному распределению» темы «Случайные погрешности»).
8) Определяется доверительная граница случайной погрешности:
63
Δ X случ (P ДОВ ) = t P ,n ⋅ S X̄ ,
где t P , n — квантиль распределения Стьюдента.
В случае, когда распределение случайной погрешности не является нормальным, студентам разрешается определять доверительную границу для вероятности 0,9:
Δ X случ (P ДОВ = 0,9) = ±1,6 S X̄ = ±1,6
S
.
√n
9) Вычисляется доверительная граница суммарной НСП результата измерения с учетом основной и дополнительных погрешностей, а также НСП, оставшихся после введения поправок:
√
Θ∑ (P ДОВ ) = ±K (P ДОВ )⋅
n
∑ Θ2i .
i=1
10) Вычисляется доверительная граница общей погрешности результата измерения Δ X ОБЩ по правилам суммирования систематической и случайной погрешностей.
11) Записывается результат измерения с указанием доверительной границы
погрешности, доверительной вероятности попадания истинного значения в указанные доверительные границы и количества измерений:
X = X изм ± Δ X ОБЩ , P = P ДОВ , n .
4.16 Определение погрешности обыкновенного косвенного измерения
В случае определения погрешности косвенного измерения измерительная задача формулируется следующим образом: имеется некая величина Y , чье значение нас и интересует. Однако, эта величина не поддается прямому измерению
(например, коэффициент теплового расширения материала ). Вместо этого, нам
известна математическая зависимость между величиной Y и рядом других величин X 1, X 2, … , X n , т. е.
64
Y = f ( X 1, X 2, … , X n ) .
И вот аргументы X 1, X 2, … , X n уже поддаются прямому измерению (в случае
коэффициента теплового расширения это размеры тела и его температура).
Важно отметить, что по результатам прямых измерений мы получим оценки ар~
~
гументов ~
X 1, X 2, … , X n , обладающие некоторой погрешностью Δ X 1, Δ X 2, … , Δ X n .
Встает вопрос: какова же оценка интересующей нас величины ~
Y , и какова ее
погрешность Δ Y ?
Ответ на первый вопрос достаточно прост: имея на руках оценки аргументов,
их следует подставить в известную функциональную зависимость и найти оценку результата косвенного измерения:
~
~ ~
~
Y = f ( X 1, X 2, … , X n ) .
Прежде, чем ответить на второй вопрос, давайте отойдем в сторону и п посмотрим на ситуацию с точки зрения простого обывателя. Предположим, вам
необходимо оценить какой-либо сервис (например, парикмахерскую), чтобы в
будущем выбирать себе подходящий сервис по принципу «у какого сервиса
оценка выше, тот сервис и лучше». Оцениваться будут, к примеру, скорость, качество и цена обслуживания в парикмахерской (можно выбрать любой набор
параметров; для примера остановимся на этих трех). Каждый из параметров будет оцениваться по привычной нам пятибалльной шкале, где пять баллов
— наивысшая оценка. Общая оценка будет складываться из оценок составляющих:
Оценка = Скорость + Качество + Цена .
Тут обнаруживается некоторое неудобство — итоговая оценка будет варьироваться от 0 до 15 баллов. Если мы изменим количество оцениваемых параметров, то и диапазон возможных значений этой оценки поменяется. Поэтому итоговую оценку стоит поделить на число слагаемых, чтобы она все так же менялась от 0 до 5 баллов:
65
1
⋅(Скорость + Качество + Цена) .
3
Оценка v 2.0 =
Такая оценка сервиса уже гораздо удобнее и привычнее.
Но может возникнуть ситуация, когда нас будет интересовать парикмахерские, обслуживающие достаточно быстро (у нас намечается важная встреча, мы
решили привести свою прическу в порядок). Или же в приоритет встают более
дешевые парикмахерские по вполне понятным причинам. Так или иначе, один
из параметров оцениваемого сервиса должен получить больший приоритет, чем
остальные. Как выделить этот параметр из всех остальных? Естественно, домножить его на какой-то коэффициент. Но как этот коэффициент выбрать, чтобы не потерять удобного свойства оценки v2.0? Как повысить влияние одного
из параметров, не меняя свойство всей оценки находиться в пределах от 0 до 5
баллов?
Для этого существует удобный аппарат математических весов. Наш случай
попадает под категорию так называемых дискретных весовых коэффициентов,
и назначаться они, в общем-то, могут как угодно, лишь бы они подчинялись
условию нормировки: сумма всех весовых коэффициентов должна равняться
единице.
Таким образом, если мы хотим выделить скорость обслуживания, наша оценка, например, может складываться следующим образом:
Оценка v 3.0 =
1
1
1
⋅Скорость + ⋅Качество + ⋅Цена .
2
4
4
Веса нормированы:
n
∑ pi = 12 + 41 + 14 = 1 .
i=1
Теперь мы можем заново определить оценки всех известных нам парикмахерских, зная оценки скорости, качества и цены для каждой из них. И, выбирая самую лучшую парикмахерскую, мы всего лишь должны выбрать парикмахер-
66
скую с наибольшей оценкой — то, что эта парикмахерская должны выделяться
по скорости обслуживания, уже учтено.
Примечание:
Оценка v 2.0
называется
равновзвешенной
оценкой,
а
Оценка v 3.0 , соответственно, неравновзвешенной.
По сути своей, проделанная работа очень близка по сути к оценке погрешности косвенного измерения. Ведь при проведении косвенного измерения мы измеряем несколько физических величин и рассчитываем результат по какой-то
формуле. Причем совершенно непонятно, как погрешность каждого аргумента
влияет на погрешность всей функции, то есть, какой приоритет имеет погрешность измерения той или иной физической величины в погрешности всего косвенного измерения.
Осталось определиться, что же будет являться весовым коэффициентом для
аргументов сложной математической функции f (X 1, X 2, … , X n ) ?
В этом случае мы будем вынуждены назначить не дискретные, а непрерывные математические веса. Весом i-го коэффициента в функции (весовым коэффициентом i-го аргумента или его коэффициентом влияния) является первая
частная производная функции по этому аргументу:
Wi =
∂Y
.
∂ Xi
Таким образом, погрешность косвенного измерения складывается из погреш ностей аргументов с учетом весовых коэффициентов этих аргументов:
Δ Y = ±W 1⋅Δ X 1 ± W 2⋅Δ X 2 ± … ± W n⋅Δ X n = ±
∂Y
∂Y
∂Y
⋅Δ X 1 ±
⋅Δ X 2 ± … ±
⋅Δ X n .
∂ X1
∂ X2
∂ Xn
Дальнейшее суммирование производится по правилам суммирования погрешностей.
Для систематических погрешностей известного знака эта сумма является, по
сути, суммарной поправкой, то есть составляющие погрешности суммируются
67
алгебраически с учетом знака погрешности и с учетом веса погрешности:
Δ Y мет =
∂Y
∂Y
∂Y
⋅Δ X 1, мет +
⋅Δ X 2, мет + … +
⋅Δ X n , мет
∂ X1
∂ X2
∂ Xn
(4.10)
Для систематических погрешностей неизвестного знака погрешность результата находится как геометрическая сумма погрешностей аргументов с учетом веса погрешностей и с учетом равномерного закона распределения систематических погрешностей:
√
Δ Y сист , ∑ = Θ∑ ( P ДОВ ) = ± K ( P ДОВ )⋅ (
2
2
2
∂Y
∂Y
∂Y
⋅Θ1 ) + (
⋅Θ2) + … + (
⋅Θn)
∂ X1
∂ X2
∂ Xn
(4.11)
Для случайных погрешностей погрешность результата находится как геометрическая сумма СКП составляющий с учетом корреляций между ними и с учетом веса составляющих:
SY =
√
2
(
2
2
n
∂Y
∂Y
∂Y
∂Y
∂Y
⋅S1 ) + (
⋅S 2) + … + (
⋅S n ) + 2 ∑ r ij⋅
⋅S i⋅
⋅S j .
∂ X1
∂ X2
∂ Xn
∂ Xi
∂Xj
i≠ j
(4.12)
С точки зрения геометрии, здесь мы имеем нелинейную функцию
~ ~
~
Y =f ( X 1, X 2, … , X n) , и для точки с координатами X 1, X 2, … , X n мы ищем прираще-
ние функции Δ Y , имея приращения аргументов Δ X 1, Δ X 2, … , Δ X n . Сложное решение этой задачи состоит в том, чтобы построить график нелинейной функции
и по графику определить нужное нам приращение с учетом всех нелинейностей
функции. Упрощение этого решения заключается в том, что вместо сложной нелинейной функции мы используем касательную к этой функции в точке измерения, то есть линеаризуем нашу функцию:
ΔY =
∂Y
∂Y
∂Y
⋅Δ X 1 +
⋅Δ X 2 + … +
⋅Δ X n .
∂ X1
∂ X2
∂Xn
Таким образом, мы снова пришли к формуле (4.10).
С точки зрения высшей математики это называется «разложением функции
в ряд Тэйлора в точке измерения с отбрасыванием нелинейных членов разложения».
68
Пусть имеется нелинейная функция
Y = f ( X 1, X 2, … , X n ) .
Для простоты ограничимся случаем двух аргументов:
Y = f ( X 1, X 2 ) .
Имеется точка измерения (X 1 изм , X 2 изм ) , причем по сути измеренное значение
— это действительное значение с учетом погрешности измерения:
( X 1 изм , X 2 изм ) = (X 1 , дст + Δ X 1, X 2 , дст + Δ X 2 ) .
(4.13)
Требуется найти приращение Δ Y i . Не забываем, что с точки зрения метрологии
Y дст = f ( X 1 ,дст , X 2 , дст ) .
(4.14)
Раскладываем функцию Y = f ( X 1, X 2 ) в окрестности точки ( X 1 изм , X 2 изм ) в ряд
Тэйлора с учетом (4.13):
Y изм = f (X 1, дст , X 2, дст ) +
∂Y
∂Y
⋅Δ X 1 +
⋅Δ X 2 +
∂ X1
∂ X2
+
1 ∂2 Y
∂2 Y
∂2 Y
2
⋅Δ
X
+
⋅Δ
X
⋅Δ
X
+
⋅Δ X 22 + ... +
1
1
2
2! ∂ X 21
∂ X 1⋅∂ X 2
∂ X 22
+
1 ∂Y
∂Y
⋅
⋅Δ X 1 +
⋅Δ X 1 + Rn +1 ,
n ! ∂ X1
∂ X2
[
[
]
]
n
где Rn+1 — остаточный член разложения.
Разумеется, мы имеем право это сделать только в том случае, если функция
является линеаризуемой в точке измерения. Если это не так (если функция является существенно нелинейной в точке измерения), то такой метод линеаризации не подойдет. Впрочем, в данном учебном курсе таких функций вы не встретите.
Принимаем приращения Δ X i малыми. С точки зрения метрологии погрешность измерения будет малой величиной, если измерение выполнено поверенным СИ, квалифицированным оператором и в адекватных условиях окружаю-
69
щей среды.
Если приращения Δ X i малые, то можно пренебречь членами высших порядков малости. То есть если Δ X 1 , Δ X 2 — малые, то Δ X 12 , Δ X 22 , Δ X 1⋅Δ X 2 и т. д. —
очень малые, и ими можно пренебречь.
Отбрасывая члены разложения высших порядков малости и учитывая (4.14),
получаем:
Y изм ≈ Y дст +
∂Y
∂Y
⋅Δ X 1 +
⋅Δ X 2 .
∂ X1
∂ X2
(4.15)
По определению, погрешность измерения это разность между измеренным и
истинным (действительным) значением:
Δ Y = Y изм − Y дст
(4.16)
Подставляя (4.15) в (4.16) , получаем:
Δ Y = Y дст +
∂Y
∂Y
∂Y
∂Y
⋅Δ X 1 +
⋅Δ X 2 − Y дст =
⋅Δ X 1 +
⋅Δ X 2 .
∂ X1
∂ X2
∂ X1
∂ X2
И снова мы вернулись к формуле (4.10).
Для того, чтобы проверить, правильно ли были взяты частные производные,
полезно
dim
[
использовать
следующий
прием:
размерность
∂Y
⋅Δ X n должна совпадать с размерностью функции dim [ Y ] .
∂Xn
]
произведения
70
4.17 Алгоритм обработки результатов обыкновенных косвенных измерений
В результате проведения однократно косвенного технического измерения получены
измеренные
значения
нескольких
физических
величин
X 1 изм , X 2 изм , … , X n изм . Эти физические величины связаны известной функцио-
нальной зависимостью с нужной нам величиной Y =f ( X 1, X 2, … , X n ) . Требуется
определить результат Y изм и погрешность Δ Y проведенного косвенного измерения.
1) Рассчитываются величины методической погрешности измерения для каждого аргумента (Δ X 1, мет , Δ X 2 , мет , ... , Δ X n , мет ) . Вводятся поправки для получения
исправленных результатов измерений X 1 испр , X 2 испр , … , X n испр .
2) Рассчитывается результат косвенного измерения по известной зависимости:
Y изм = f (X 1 ,испр , X 2 ,испр , … , X n, испр ) .
3) Рассчитываются коэффициенты влияния по каждому аргументу косвенного
измерения:
Wi =
∂Y
для всех i.
∂ Xi
∂Y
⋅Δ X n = dim[Y ] .
Проводится проверка на размерости: dim
[
∂Xn
]
4) Рассчитываются инструментальные погрешности измерений аргументов
(основные и дополнительные при необходимости) (Δ X 1 , Δ X 2 , ... , Δ X n) (по классу точности или по паспорту используемого СИ).
5) Рассчитывается суммарная систематическая погрешность результата косвенного измерения Δ Y согласно формуле (4.11). Проводим проверку по предельной оценке погрешности аналогично формуле (4.3).
6) Записывается
результат
косвенного
измерения
в
виде
71
Y = Y изм ± Δ Y сист, ∑ , P = P ДОВ .
4.18 Пример поиска погрешности обыкновенного косвенного измерения
Проводится измерение индуктивности резонансным методом: катушка неизвестной индуктивности L X последовательно соединяется с конденсатором образцовой емкости C , после чего в контуре изменяется частота f образцового
генератора до тех пор, пока вольтметр V не зарегистрирует максимальное
напряжение на конденсаторе (напоминание: резонанс в последовательном колебательном контуре — это резонанс напряжений):
В этом случае индуктивность возможно определить по известной формуле:
LX =
1
.
4 π f 2C
2
После расчета индуктивности возникает вопрос — а каким образом инструментальные погрешности задания образцовой частоты и изготовления образцовой емкости влияют на погрешность этого косвенного измерения?
Определяем коэффициенты влияния:
∂ LX
−1
;
=
2 2 2
∂C
4π f C
∂ LX
−2
.
=
∂f
4 π2 f 3 C
Общая погрешность измерения:
72
Δ LX = ±
∂ LX
∂ LX
1
2
⋅Δ C ±
⋅Δ f = ± 2 2 2⋅ΔC ±
⋅Δ f .
2 3 2
∂C
∂F
4π f C
4π f C
По этой формуле уже можно вести численный расчет. Однако, выразим погрешность в относительной форме для дальнейшего анализа:
δ LX =
Δ LX
1
2
ΔC
Δf
2 2
.
= ±
⋅Δ C ±
⋅Δ f ⋅4 π f C = ±
±2
2 2 2
2 3 2
LX
C
f
4π f C
4π f C
(
)
Таким образом,
δ LX = ±δ C ± 2δ f .
В случае суммирования систематических погрешностей неизвестного знака
(а инструментальные погрешности таковыми и являются):
2
2
δ LX = K ( P ДОВ )⋅√ δC + (2 δ f ) .
Этой формулой и описывается влияние инструментальных погрешностей аргументов f, C на общую систематическую погрешность измерения индуктивности катушки.
4.19 Прием приведения косвенных многократных измерений к прямым
Обработка результатов статистических косвенных измерений представляет
собой сложную и трудоемкую задачу. При наличии корреляционных связей
между измерениями задача еще более усложняется, а при разном числе измерений аргументов и малом числе измерений (менее 20) эта задача вообще не имеет строгого математического решения.
В МИ 2083-90 описан прием приведения ряда отдельных значений косвенно
измеряемой величины к ряду прямых измерений. Для того, чтобы воспользоваться этим приемом, необходимо проконтролировать следующее: все аргументы должны измеряться в один и тот же момент времени и одинаковое число раз.
После этого рассчитываются значения косвенно измеряемой величины
73
Y mn = f ( X m1, изм , X m2, изм , ... , X mn , изм ) . Полученная выборка значений Y mn может рассмат-
риваться как результаты прямых многократных измерений, и обработка этой
выборки проводится в соответствие с алгоритмом обработки результатов прямых многократных технических равноточных измерений, описанного в 4.15.
74
5 Список использованной литературы
1) Отчалко В.Ф. Метрология, стандартизация и сертификация: Учебное пособие, — Томск: Томский межвузовский центр дистанционного образования,
2010. — 208 с
2) Евтихиев Н.Н, Купершмидт Я.А., Папуловский В.Ф., Скугоров В.Н. Измерение электрических и неэлектрических величин: Учебное пособие для вузов,
Москва: Энергоатомиздат, 1990, 352с.
3) Нефедов В.И., Сигов А.С., Бирюков В.К. Метрология и радиоизмерения:
Учебное пособие для вузов. — 2-е изд., перераб. — М.: Высшая школа, 2006.
— 526 с.: ил
4) Новицкий П.В., Зограф И.А. Оценка погрешностей результатов измерений.
— Л.: Энергоатомиздат, Ленингр. отде-ние, 1985 — 245 с., ил.