Лекция. Инженерный анализ и исследование
автоматики в САПР
1 ОСНОВНЫЕ КОНЦЕПЦИИ МКЭ
Метод конечных элементов (МКЭ) завоевал к настоящему времени
широкое признание весьма эффективного машинно - ориентированного
метода решения большого класса сложных задач математической физики и
расчета сложных физически разнородных технических систем различного
назначения (механических, электрических, гидравлических и т.д.).
Рассмотрим применение концепций МКЭ к задачам расчета
механических систем. Эта область применения является для метода
традиционной и получала достаточно хорошое теоретическое и практическое
обоснование. Здесь объектом исследования является механическая система
(металлоконструкция, стержневая система, механизм).
Не вдаваясь в чисто математические тонкости определения МКЭ в структуре
современных численных методов,
в прикладном аспекте целесообразно
рассматривать МКЭ как совокупность специальных философских, физических,
математических и алгоритмических приемовv обеспечивающих численное решение
сложных технических задач и задач математической физики на ЭВМ.
Отличительные приёмы МКЭ, включают в себя:
идею дискретизацию (диакоптики) области исследуемого объекта на
отдельные в дальнейшем неделимые составные части - конечные элементы (КЭ);
математический аппарат и принципы построения моделей КЭ;
формализацию процедур формирования модели исследуемого объекта (КЭмодели) из моделей отдельных элементов;
способы представления информации об исследуемом объекте в удобной для
метода форме;
совокупность приемов реализации алгоритмов, обеспечивающих
рациональное использование ЭВМ;
методы исследования КЭ-моделей объектов, реализующие решение
физических задач.
Разработанные в МКЭ и доведенные до совершенства именно эти приемы
делают метод уникальным, высоко автоматизируемым и достаточно гибкий
средством решения различных сложных задач инженерного анализа на ЭВМ.
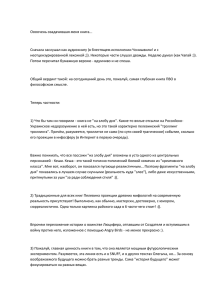
Согласно идее дискретизации, в МКЭ физическая модель исследуемого
объекта представляется в виде совокупности достаточно простых, условно
неделимых частей - конечных элементов (КЭ). Связь между элементами осуществляется в конечном числе узловых точек (узлов). С узлами связывается
система обобщенных узловых координат, однозначно определяющая
положение принятой модели. В результате, осуществляется переход от
реального исследуемого объекта с бесконечным числом степеней свободы к
1
идеализированной дискретной КЭ-модели, обладающей конечным числом
степеней свободы (рис.1.1).
При расчете механических систем удобно в качестве обобщенных
координат использовать обобщенные узловые перемещения. В строительной
механике такой подход получил название метод перемещений. В нашем
случае – это будет МКЭ в форме метода перемещений. Тогда, аддитивность
принятой
КЭ-модели,
однозначно
определяющая
ее
состояние,
обеспечивается за счет выполнения условий узлового равновесия и
непрерывности обобщенных перемещений.
Рис.1.1- Схема представления объекта совокупностью конечных элементов
а) - объект; б) - выделенные конечные элементы; в) - совокупность конечных
элементов, моделирующих объект
Основной алгоритм метода включает следующие этапы:
I. Выбор узловых неизвестных (обобщенных координат);
II. Выделение в исследуемом объекте КЭ;
III. Разработка моделей отдельных элементов (локальная модель);
IV. Задание характеристик КЭ;
V. Формирование КЭ-модели исследуемого объекта из моделей
отдельных КЭ (глобальная модель);
VI. Задание начальных и граничных условий задачи;
VII. Исследование полученной КЭ-модели объекта (определение
искомых параметров исследуемого объекта, соответствующих
исследуемой задаче).
Анализируя этот алгоритм, нетрудно провести аналогии МКЭ с
существующими и ранее подходами к анализу сложных технических систем.
Достаточно вспомнить, что задача динамического анализа многомассовых
систем представляется системой дифференциальных уравнений, каждое из
которых описывает движение отдельной массы с учетом накладываемых
связей. Здесь используется процедура формирования модели многомассового
объекта из моделей поведения отдельных масс. Подобные подходы
используются при решении задач строительной механики, анализе
электрических и гидравлических цепей. Этот подход заложен в диакоптике,
разработанной англ. ученым Габриэлем Кроном и опубликованной 7.06.1957
года в Лондоне в серии «Диакоптика - Кусочное решение крупномасштабных
2
систем» The Electrical Journal.
Основная цель динамического анализа заключается в установлении
общих зависимостей между силами (моментами сил), действующими на
звенья мехсистемы, и кинематическими параметрами с учетом подвижных
масс (моментов инерции). Эти зависимости определяются из уравнений
движения механизма.
В соответствии с видом мехсистемы решаются динамические задачи для
сплошной (единая металлоконструкция) или дискретной (мехсистема,
состоящая из звеньев, механизм) среды. Особенности моделирования системы
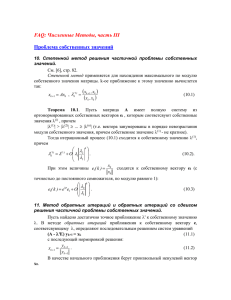
в виде твердого деформируемого тела заключается в том, что рассматриваются
перемещения, вызывающие изменение только формы и размеров деформации тела. Назовем их деформационными (δ). При движении тела в
пространстве без деформации имеем кинематические (номинальные)
перемещения (v). Реальное перемещение представляет собой суперпозицию
этих перемещений (q=δ+v). Тела (звенья) под действием системы сил
перемещаются в пространстве и деформируются (рис.1.2).
Рис.1.2 – Схема
формирования
перемещений: а) исходная
конструкция,
б)
перемещение абсолютно
жесткой конструкции, в)
перемещение
с
деформацией пружины
Закон
движения
механизма
в
аналитической
форме
задается
в
виде
зависимостей его обобщенных координат от времени. Наиболее просто задачи
динамики решают для механизмов с жесткими звеньями и одной степенью
свободы с помощью классических методов теории механизмов и машин.
Однако современная техническая практика требует решения более сложных
задач, в которых исследуется динамика быстроходных машин и механизмов с
учетом упругих свойств материалов их звеньев, наличия зазоров в их
кинематических цепях и других факторов.
О сложности решения задач динамического анализа механизмов можно
судить по словам Жозефа Луи Лагранжа (1736-1813): «… в том случае, когда
исследуют движение многих тел, действующих друг на друга путем удара или
давления, непосредственно … или при посредстве нитей и недеформируемых
рычагов, к которым они прикреплены … то этого рода задачи принадлежат
к проблемам более высокого порядка».
3
2 ОСНОВНЫЕ МОДЕЛИ ИССЛЕДОВАНИЯ
МЕХАНИЧЕСКОЙ СИСТЕМЫ
Матричный аппарат МКЭ носит настолько общий характер, что теоретически
возможно составить единую вычислительную программу, способную решить
практически неограниченное число разнообразных задач механики конструкций.
Это позволяет создавать мощные универсальные программные комплексы.
Вычислительные комплексы, отвечающие этим требованиям даже в
ограниченном масштабе, называются программными продуктами общего
назначения.
Задание *Дополнить примерами комплексов с кратким описанием и
ссылками*
Для различных исследований сложных мех. систем достаточно сформировать
определяющие их математическую модель основные матричные соотношения:
матрицы масс (инерции) [M], жесткости [K], демпфирования [B] и т.п. При вводе
требуется информация о материале, геометрии и топологии конечно-элементной
модели, условий нагружения и закрепления конструкции, виде решаемой задачи.
При использовании суперэлементного подхода исходная информация задается и для
каждой подконструкции в отдельности.
Рассмотри основные формулировки задач исследования.
А. Математическая формулировка статической задачи
Соотношения между силами и перемещениями в МКЭ в форме
перемещений представляют собой уравнения жёсткости (статические
уравнения метода перемещений в строительной механике). Уравнения
жёсткости для КЭ-модели являются линейными алгебраическими
уравнениями равновесия, которые имеют место в любой системе координат и
записываются в виде
K q P, (2.1)
где [K] – матрица жёсткости; {q} – вектор узловых перемещений; {P} –
вектор узловых сил. Элементы матрицы жёсткости представляют собой
упругие реакции в узлах КЭ-модели от единичных перемещений.
Задание * Добавить краткую характеристику задачи*
Б. Математическая формулировка задачи динамики в форме Коши
Матричное уравнение движения упругой системы в КЭ-постановке
имеет вид:
M q B q K q P(t ), 2.2
d q
d q
– векторы ускорений и скоростей узлов
,q
dt
dt
конструкции; {Р(t)} – вектор узловых динамических сил.
где
q
4
Математически задача состоит в нахождении решения системы
дифференциальных уравнений, однозначно удовлетворяющего так
называемым
начальным
условиям
(задача
Коши).
Например,
q(t 0) q0 , q(t 0) q0 .
Выражение дифференциальных уравнений движения механической
системы с распределенными параметрами (2.2) может быть получено из
уравнений Лагранжа второго рода для отдельного КЭ:
d T e
De U e
P e (t ) , (2.3)
dt q q q
куда входят
кинетическая энергия КЭ T e
диссипативная энергия D e
1
T
u u d ;
2 e
1
T
u
u d ;
2 e
энергия упругой деформации U e
1
T
d .
2 e
Слагаемые левой части уравнения (2.3) представляют собой реакции КЭ
rJe rDe rYe P e (t )
на внешние воздействия:
инерционные реакции
d T e
e
rJ dt q ( e N T N d )q me q ;
упругие реакции
U e
e
rY q ( e N T G N d )q k e q ;
реакции внутреннего трения
De
e
r
D q ( e N T N d )q be q ,
где , - плотность и коэффициент демпфирования материала;
e -объем КЭ; N , G - матрицы формы КЭ и упругих констант
материала.
В уравнениях реакций элемента связь с узловыми кинематическими
параметрами устанавливается матрицами жесткости k e , инерции (масс)
m e , демпфирования be :
k e
N G N d ;
T
(2.4)
e
5
me
b
e
N
N d ;
N
N d .
T
(2.5)
e
T
(2.6)
e
В. Математическая формулировка задачи о собственных (свободных)
колебаниях
Матричное уравнение метода конечных элементов в перемещениях
задачи свободных колебаний имеет вид:
M q K q 0, 2.7
где внешняя нагрузка отсутствует{Р} ={0}.
Полагая закон колебаний гармоническим можно записать:
q A0 sin(0t ),
q 0 A0 cos(0t ), q 02 A0 sin(0t ), 2.8
где A0 - вектор амплитудных значений узловых
перемещений
конструкции; 0 - частота собственных колебаний.
Подставляя (2.7) в (2.8) и выполняя очевидные преобразования, имеем
систему линейных однородных уравнений относительно {А0}:
( K 02 M ) A0 0 , 2.9
Значения 02 , удовлетворяющие уравнению (2.9), представляют собой
собственные (свободные) частоты колебаний системы. При нахождении
собственных значений решается частная математическая задача определения
собственных значений. Собственные числа и собственные векторы
определяются итерационным методом.
Задание * Добавить краткую характеристику задачи*
Г. Математическая формулировка задачи устойчивости
В расчётах на устойчивость различают следующие два вида задач:
– потеря устойчивости конструкции в Эйлером смысле (задача линейной
теории устойчивости);
– потеря несущей способности конструкции (задача нелинейной теории
устойчивости).
Для решения нелинейной задачи устойчивости используется следующее
матричное уравнение в общей системе координат:
K q0 G0 q0 P0, 2.10
где [K] – матрица жёсткости конструкции; [G0] – матрица потенциала
нагрузки конструкции; {q0} – вектор узловых перемещений конструкции.
Решение ищется итерационно.
6
Условия, связанные с разрушением конструкции, включают
нелинейную теорию потери устойчивости, однако линейная теория служит
основой для решения задачи устойчивости и представляет интерес при
проектировании большого числа конструкций. Для численной реализации
линейной задачи используется следующее матричное уравнение МКЭ в
перемещениях:
( K G0) q0 0 2.11
Выражение (2.7) представляет собой систему линейных однородных
уравнений относительно узловых перемещений {q0}. При решении системы
уравнений заданная нагрузка приводится к одному параметру p, который
выносится из матрицы потенциала нагрузки [G0], т. е.
( K p G0) q0 0 2.12
Как видно, с математической стороны задачи устойчивости и свободных
колебаний полностью совпадают, т. е. матричный аппарат МКЭ носит
стандартный характер для этих задач. Если в задаче устойчивости стержневой
системы оперируют с матрицами потенциала нагрузки, то в задаче свободных
колебаний – с матрицами масс.
Задание *Добавить краткую характеристику задачи*
Д. Математическая формулировка задачи динамики многозвенной
системы (механизма)
Как уже отмечалось, более сложную задачу представляет динамический
анализ механизмов. Это вызвано целым рядом особенностей, присущим этим
мехсистемам:
представляют
многомассовые
упруго-диссипативные
системы,
совершающие кинематические и деформационные перемещения (см.
разд.1);
имеются нелинейности типа люфтов, зазоров в кинематических парах;
имеется переменность структуры механизма в процессе работы, связанная
с разрушением и замыканием кинематических связей.
Модель динамики описывается системой нелинейных дифф. уравнений
M q B q K P(t ), 2.13
q - вектор полных
q - вектор деформационных
где
узловых перемещений мех-ма,
узловых перемещений мех-ма,
вызванных приведенными деформациями в узлах звеньев мех-ма, - вектор
d q
d q
–
,q
dt
dt
векторы полных ускорений и скоростей узлов конструкции; {Р(t)} – вектор
внешних узловых динамических сил.
кинематических узловых перемещений мех-ма,
q
7
Математически задача состоит в нахождении решения системы
дифференциальных уравнений, однозначно удовлетворяющего так
называемым
начальным
условиям
(задача
Коши):
q(t 0) q0 , q(t 0) q0 .
Модель динамики мех-ма (2.13) целесообразно представить с одним
видом перемещений
M q B q K q P(t ) G , 2.14
где G K - вектор условных кинематических нагрузок.
Задание *Добавить краткую характеристику пакета «Зенит 95»,,
реализующего изложенную теорию* (см. фирма ДИП, «Зенит 95», код доступа:
http://ntp-dip.ru/)
3 ПРИМЕР ФОРМИРОВАНИЯ МАТРИЦ КЭ-МОДЕЛИ
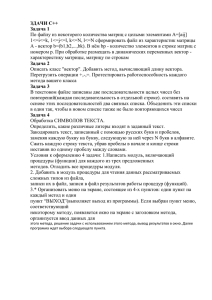
Принципы формирования динамической КЭ-модели механической
системы рассмотрим на примере гипотетической одномерной многомассовой
пружинной конструкции, представленной на рис. 3.1.
Рис. 3.1 - Динамическая модель
механической системы
Конструкция имеет 4 сосредоточенные массы (Mi, i=1…4), соединенные
упругими связями (5-ю пружинами с массой и жесткостью соответственно m(е)
8
и C(e) (e=1…5)). Конструкция нагружена изменяемой во времени силой P1(t) и
опорной реакцией P4(t).
Допущения:
Все перемещения и деформации системы только вдоль оси х;
Пружины одинаково работают на растяжение – сжатие;
Способы крепления обеспечивают идеальное соединение в узлах.
Движение модели этой системы без учета демпфирования описывается
динамическим уравнением вида:
M q K q P(t ) (3.1) ,
где M , K , P(t ) - матрицы масс, жесткости и вектор внешних сил;
q - глобальный вектор обобщенных узловых перемещений.
Для представления КЭ- модели выполним следующие предварительные
действия:
1. пронумеруем узлы системы, где стыкуются упругие связи (это
сосредоточенные массы);
2. установим в каждом узле обобщенное перемещение (нумерация
соответствует номеру узла);
3. каждая пружина нумеруется и представляет собой отдельный КЭ
со своими характеристиками.
Эти действия на рис. 3 уже выполнены.
Для формирования матриц в (3.1) необходимо иметь матрицы
локальных моделей отдельных КЭ.
3.1 Матрица жесткости пружины
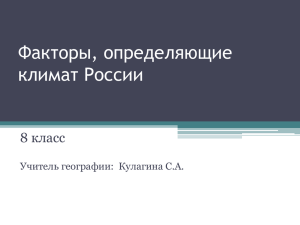
Представим локальную систему координат пружины согласно рис.3.2 и
определим матрицу жесткости (МЖ) k e различными способами.
А. Интуитивный способ
Запишем уравнения упругих реакций в узлах пружины:
ri(e) Ce (qi q j ); rj(e) Ce (q j qi )
или в принятой для МКЭ матричной форме
(e)
ri ( e ) Ce (qi q j );
1 1 qi
ri
C
e
(e)
q ,
r
1
1
rj( e ) Ce (q j qi );
j
j
где МЖ пружины, представляющая матрицу связи в выражении упругих
реакций и узловых перемещений имеет вид:
1 1
k e Ce
1 1
(3.2).
9
Рис. 3.2 Локальные представления КЭ пружины
Б. Способ использования энергии упругой деформации
1
Энергии упругой деформации пружины имеет вид: U e Ce (qi q j )2 .
2
Узловые упругие реакции можно вычислить по условию стационарности
Лагранжа:
U e
(e)
ri
Ce (qi q j );
qi
e
U
(e)
rj
Ce (q j qi ).
q j
Т.е получаем опять выражение (3.2).
В. Способ использования формулы МКЭ (формальный)
Этот способ и общая формула для вычисления k e достаточно широко
известны. В случае пружины приводит к полученному выше выражению и
поэтому излагаться не будет.
3.2 Формирование глобальной МЖ системы
В МКЭ в форме метода перемещений построение КЭ – модели мех.
системы из моделей отдельных КЭ осуществляется на основе принципов
совместности и неразрывности перемещений, а также равновесия сил в узлах.
Совместность обеспечивается тем, что значения соответствующих
перемещений все КЭ, сходящихся в данном узле, полагаются одинаковыми.
Непрерывность обеспечивается построением моделей отдельных КЭ, в
которых используются функции перемещений непрерывные в пределах
каждого КЭ.
Равновесие сил – общепринятый прием механики. В данном случае
полагается, что в каждом узле равна нулю сумма внешних сил Pi и
10
соответствующих реакций ri от всех, сходящихся в узле КЭ:
Pi ri 0 или ri Pi
Используем эти положения для формирования матрицы жесткости КЭмодели рассматриваемой конструкции. Распишем равновесие по узлам
модели:
(i 1) C1 (q1 q 2) P1
(i 2) C1 (q 2 q1) C 2 ( q 2 q3) C 3 ( q 2 q3) C 4 ( q 2 q 4) 0
(i 3) C 2 (q3 q 2) C 3 (q3 q 2) C 5 (q3 q 4) 0
(i 4) C 4 (q 4 q 2) C 5 (q 4 q3) P 4
По правилам матричной алгебры эти преобразуем левую часть, выделяя
вектор перемещений:
-C1
0
0 q1 -P1
C1
-C1 C1 + C2 + C3 + C4
-C2 - C3
-C4 q2 0
× =
0
-C2 - C3
C2 + C3 + C5
-C5 q3 0
-C4
-C5
C4 + C5 q4 P4
0
Эта
запись
конструкции:
отражает
статическую
КЭ-модель
рассматриваемой
K(4×4)×q(4×1) = P(4×1),
где матрица жесткости определяется выражением
Формирование
МЖ
конструкции
подчиняется
простому
топологическому правилу: каждая строка соответствует номеру узла,
каждый столбец - номеру перемещения.
Анализ статической модели:
Коэффициенты главной диагонали являются положительными и
превалируют в строке — это признак положительной определенности
матрицы.
Структура матрицы жесткости квадратная (число строк = числу
столбцов) и симметричная относительно главной диагонали.
Имеются нулевые коэффициенты, которых будет тем больше, чем
больше размерность матрицы, что свидетельствует о разреженности МЖ.
Относительно решения полученной статической модели в виде системы
линейных алгебр. уравнений, то в такой форме она несовместна и ее решение
невозможно, хотя матрицы определены правильно. Неверно выполнена
постановка задачи. Даже уравновешенная по вектору сил (Р1=Р4)
11
механическая система может совершать множество допустимых
перемещений. Для решения нужно закрепить узел 4, т.е. положить q4=0.
3.3 Формирование матрицы масс (инерции) системы
Для формирования матрицы масс (инерции) КЭ- модели системы
необходимо знать локальные матрицы масс отдельных КЭ. В
рассматриваемом примере учитываются сосредоточенные массы в узлах
модели (предположительно массивные тела) и распределенные массы пружин.
Согласно общей концепции МКЭ массы должны быть приведены к
узлам модели, т.е. к приложению и направлению обобщенных координат.
Сосредоточенные в узлах модели массы не требуют приведения, они
просто вставляются в матрицу масс КЭ- модели в ячейку, соответствующую
узлу принадлежности.
Рассматриваемая система имеет 4-е обобщенных узловых координаты, а
значит имеет размерность (4х4). В этом случае часть матрицы масс,
учитывающая сосредоточенные узловые массы, представляется в виде:
.
0
0
M1 0
0 M2 0
0
.
M s
0
0 M3 0
0
0 M 4
0
3.4 Матрица масс пружины
Приведение распределенной по объему массу КЭ принято определять в
согласованной и несогласованной формулировках.
В классическом представлении матрицы масс (инерции) КЭ
определяются формулой
T
me N N d
3.3 ,
e
где N - матрица формы элемента; , -плотность и объем материала.
Здесь используется та же матрица формы элемента, что и в классической
формуле матрицы жесткости. В этом случае матрица масс называется
согласованной по форме элемента.
Простейшим примером несогласованной формулировки матрицы масс
КЭ является диагональная матрица.
A. Диагональное представление матрицы масс КЭ
Способ заключается в равномерном распределении массы по узлам КЭ.
При массе пружины me несогласованное диагональное представление
локальной матрицы масс имеет вид:
12
m
m( e ) e
2
1 0
0 1
3.4
B. Формальный способ представления матрицы масс КЭ
Способ основан на применении известной формулы МКЭ. Для
получения согласованного результата необходимо знать матрицу формы
элемента. На основе рис. 3.2 можно записать выражение линейной
аппроксимации произвольного перемещения (u) от его узловых значений
qi
u (1 x / L) qi ( x / L) q j N 1 x / L x / L .
q j
Поставляя полученное выражение в (2.3), получаем
1 x / L
m( e )
1 x / L x / L d ;
x
/
L
e
m11e m12e
( L x) 2 x ( L x)
m 2
dx e
e
2
L
x
(
L
x
)
x
m21 m22
L
где Ae -площадь сечения КЭ.
Интегрируя последнее соотношение, имеем
Ae
Ae L3 m
m11e 2 ( L x)2 dx 2 e ;
L L
L
3
3
(e)
Ae
m m
e
12
e
21
Ae
2
L
( L x) x dx
Ae L3
L
L
Ae
2
Ae L3
6
3.5 ,
me
;
6
me
.
L L
L
3
3
В результате получаем согласованную матрицу масс пружины
e
m22
2
2
x dx
m11e m12e me
m e
e
3
m
m
21
22
(e)
2
1 1 / 2
.
1
/
2
1
3.5 Матрица масс КЭ - модели примера
Матрица масс КЭ-модели (рис.3.1) рассматриваемого примера
получается растасовкой коэффициентов в соответствии с глобальными
номерами обобщенных перемещений (ускорений).
Несогласованная (диагональная) форма:
13
m1
M
1
0
2
4
1 mi
0
M2
М
2
0
0
0
0
0
0
M3
m3 m2 m4
2
0
0
(3.6)
0
m4 m5
M4
2
0
.
Согласованная форма:
m1
m1
M
1
3
6
4
1 mi
m1
M2
M 6
3
m2 m3
0
6
0
0
0
m2 m3
6
m2 m3 m5
M3
3
m4
6
m4
(3.7)
6
m5
6
m4 m5
M4
3
0
Формирование
согласованной
Матрица
масс
КЭ-модели
проиллюстрируем примером вычисления строки 3, соответствующей узлу 3
(обобщенному ускорению q3).
Инерционные реакции в узлах КЭ (рис.3.2) определяется зависимостью:
rJie d T e
qi
e
rJ e
me ,
q j
rJj dt q
где с учетом зависимости () реакции в узлах (i, j) КЭ имеют вид:
q
me
me
q
rJie
(qi j ); rJje
(q j i ) .
3
2
3
2
Инерционная реакция в узле 3 представляет сумму инерционных
реакция от всех, сходящихся в узле КЭ:
(m2 m3 m5)
(m2 m3)
m5
RJ 3 ( M 3
) q3
q2
q4 ,
3
6
6
массы при ускорениях которой представляют коэффициенты 3-ей
строки в согласованной матрице масс (3.7) КЭ- модели.
14