КОНЕЧНЫЙ ЭЛЕМЕНТ ДЛЯ МОДЕЛИРОВАНИЯ
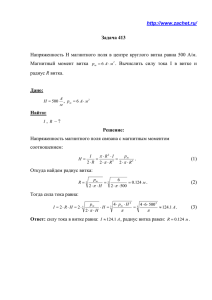
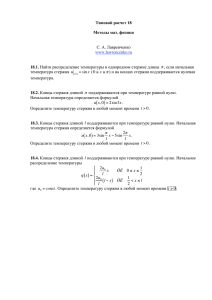
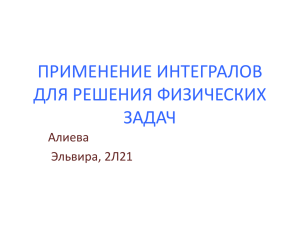
реклама

1 КОНЕЧНЫЙ ЭЛЕМЕНТ ДЛЯ МОДЕЛИРОВАНИЯ СИСТЕМ КРИВОЛИНЕЙНЫХ СТЕРЖНЕЙ O R n2 2 2 1 b2 1 Рис.1 b1 Уравнения состояния плоского кругового стержня N Q n 2U A R Q n N 2V AR Q b 2W AR M t Mn M n M t Qb R M b Q n R U NR V E A V b R U W n R t MtR G J P n MnR E Jn b MbR E J b (1) В матричной форме: Y A 2 B Y Y N Qn F q Qb Mt Mn Mb U V W (2) t n b (3) Общее решение: Y Ce p Характеристическое уравнение: det pI - A 2 B 0. (4) 2 Характеристический многочлен: det G( p, ) (5) p 2 x 2 p 2 y 2 p 2 2 z1 p z12 z 22 p 2 2 z1 p z12 z 22 P4 ( p) Фундаментальные решения уравнения (2); Vk – собственные векторы А - 2В V(, ) V1 ()e p1 ( ) V2 ()e p2 ( ) V3 ()e p3 ( ) ... V12 ()e pk ( ) Общее решение : Y(, ) V(, )C , С – произвольный вектор. (6) Нормированное решение: V(,0)C Y(0) C V( ,0) -1 Y(0) Y( , ) V( , )V( ,0) -1 Y(0) D( , )Y(0) Для конца стержня Fk D FF q k D qF (7) Yk Y( , k ) D( , k )Y(0) D Fq F(0) D qq q(0) (8) q k D qF F(0) D qq q(0) F(0) D qF 1 q k D qq q(0) Для произвольного угла (9) 1 1 q( ) D qF ( )D -qF ( k )q k D qq ( ) D qF ( )D -qF ( k )D qq ( k ) q(0) Матрица функций формы конечного элемента: -1 F(, ) D qq ( ) D qF ( )D -1 qF ( k )D qq ( k ) D qF ( )D qF ( k ) (10) (11) ФУНКЦИОНАЛ ЛАГРАНЖА ДЛЯ КРУГОВОГО СТЕРЖНЯ Деформации волокон, параллельных оси: R u k v ( w v w v ) y (v k u w) z ( w v) (12) d t R R ds R – расстояние от волокна до центра тяжести сеченияения в поперечной плоскости Углы поворота подвижного трехгранника: b v k u w n w v (13) 3 R E R R G R dV u u v v w wdV V V l u pt v p n w pb ds u(0) N (0) v(0) Qn (0) w(0) Qb (0) 0 u (l ) N (l ) v(l ) Qn (l ) w(l ) Qb (l ) t (0) M t (0) n (0) M n (0) b (0) M b (0) t (l ) M t (l ) n (l ) M n (l ) b (l ) M b (l ) 0 (14) k u v EA u v (v u ) EJ b R GJ p EJ n 0 w t w t 3 3 R R u u v w t 0 0 (15) вектор независимых перемещений 1 0 2 0 2 0 R3 (v u ) d 2 2 0 0 0 0 0 (16) оператор дифференцирования (17) Аппроксимирующее выражение для градиентов перемещений: ( ) F1 ( ) q B( )q (18) F1 – первые четыре строки из матрицы (11) k K B T EBd 0 - матрица жесткости EA R 0 E 0 0 0 EJ n R3 0 0 0 0 EJ b R3 0 0 0 0 GJ p R (19) 4 1 0 T M F IF ARd I 0 0 0 k 0 0 0 1 0 0 0 1 0 0 0 0 (20) 0 (21) -матрица масс k P F T pRd , p pt pn pb 0 - вектор узловой нагрузки. n+2 O2 n+1 O1 O3 n Истинная ось стержня bn+1 n-1 bn Рис.2. Ансамбль конечных элементов Рис.3. Сетка конечных элементов витка пружины (Ne =10) 5 Результаты расчета частот свободных колебаний витка пружины диаметр витка 2R = 40 мм; диаметр проволоки d=2мм; угол подъема 0.05 Отношения частот, определенных по МКЭ, к теоретическим № 1 Прямолинейный Криволинейный КЭ, Ne=50 КЭ, Ne=5 0.97 0.985 Время расчета, с 10/200 2 0.876 0.967 10/240 3 0.765 0.950 10/240 Вывод: предложенный конечный элемент превосходит традиционный по точности, но уступает ему по быстродействию.