Междисциплинарный проект "Разработка и испытание интегрированных навигационных систем"
реклама

МИНОБРНАУКИ РОССИИ
–––––––——————————–––––––
Санкт-Петербургский государственный
электротехнический университет «ЛЭТИ»
им. В. И. Ульянова (Ленина)
–––––––——————————–––––––
РАЗРАБОТКА И ИСПЫТАНИЯ ИНТЕГРИРОВАННЫХ
НАВИГАЦИОННЫХ СИСТЕМ
Учебно-методическое пособие
Санкт-Петербург
Издательство СПбГЭТУ «ЛЭТИ»
2019
УДК 681.783.322.3(07)
ББК В213.33я7+К948я7
Р17
Авторы:
Боронахин А. М.,
Давыдов В. Б.,
Подгорная Л. Н.,
Ткаченко А. Н.
Р17 Разработка и испытания интегрированных навигационных систем: учеб.метод. пособие. СПб.: Изд-во СПбГЭТУ «ЛЭТИ», 2019. 72 с.
ISBN 978-5-7629-2442-9
Представлены
методические
рекомендации
по
выполнению
междисциплинарного проекта. Перечислены основные дисциплины, на
основании которых выполняется проект.
Даны рекомендации по расчету или выбору основных параметров
гироприбора, а также определению его основных погрешностей.
Предназначено для подготовки магистров по направлению
«Приборостроение» по магистерской программе «Интегрированные
навигационные технологии».
УДК 681.783.322.3(07)
ББК В213.33я7+К948я7
Рецензент – канд. техн. наук, технический директор ООО «ИНТЕРТЕХ»
А. А. Иванов.
Утверждено
редакционно-издательским советом университета
в качестве методических указаний
ISBN 978-5-7629-2442-9
© СПбГЭТУ «ЛЭТИ», 2019
1. ЦЕЛИ И ЗАДАЧИ МЕЖДИСЦИПЛИНАРНОГО ПРОЕКТА
В соответствии с учебным планом междисциплинарный проект
выполняется студентами в третьем семестре на базе ранее изученных
дисциплин, а также с использованием знаний, полученных в бакалавриате.
Целью междисциплинарного проекта является приобретение навыков по
системе реализации и интеграции приобретенных знаний [1].
Задачами междисциплинарного проекта являются:
– изучение студентами отдельных проблем профессиональной
деятельности, а также приобретение знаний по применению методов и
средств решения конкретных инженерных задач;
– формирование умения проведения обзора и обоснования выбора путей
решения поставленной задачи на основе знаний, полученных в смежных
областях науки и техники; способности применения знаний, умений и
навыков, полученных в смежных дисциплинах, для анализа (синтеза)
предложенных решений;
– освоение и приобретение навыков по расчету базовых характеристик
современного оборудования и приборов навигационных систем.
Междисциплинарный проект предусматривает создание математической
модели гироскопического прибора (гировертикали) в пакетах MatCad и
MatLab/Simulink, выбор и расчет его основных параметров, а также
методических и инструментальных погрешностей, обеспечивающих
выполнение условий технического задания.
2. МЕСТО МЕЖДИСЦИПЛИНАРНОГО ПРОЕКТА В СТРУКТУРЕ
ОСНОВНОЙ ОБРАЗОВАТЕЛЬНОЙ ПРОГРАММЫ
Междисциплинарный
проект
«Разработка
и
испытания
интегрированных навигационных систем» относится к вариативной части
ООП. Проект разрабатывается на основе ранее освоенных дисциплин
учебного плана:
1. Приборы навигации.
2. Измерительные преобразователи и исполнительные устройства
приборов навигации.
3. Приборы ориентации.
4. Метрологическое обеспечение навигационных систем.
5. Математическое моделирование в приборных системах.
3
6. Разработка и испытание интегрированных навигационных систем.
3. КОМПЕТЕНЦИИ, ВЫРАБАТЫВАЕМЫЕ В ПРОЦЕССЕ
ВЫПОЛНЕНИЯ МЕЖДИСЦИПЛИНАРНОГО ПРОЕКТА
В процессе проектирования студент должен приобрести и упрочить
следующие компетенции:
Общекультурные:
ОК-1 – способность к абстрактному мышлению, обобщению, анализу,
систематизации и прогнозированию.
Профессиональные:
ПК-01 – способность к построению математических моделей объектов
исследования и выбору численного метода их моделирования, разработке
нового или выбор готового алгоритма решения задачи;
ПК-03 – способность и готовность к оформлению отчетов, статей,
рефератов на базе современных средств редактирования и печати в
соответствии с установленными требованиями;
ПК-04 – готовность к защите приоритета и новизны полученных
результатов исследований с использованием юридической базы для охраны
интеллектуальной собственности;
ПК-09 – готовность к составлению технической документации, включая
инструкции по эксплуатации, программы испытаний, технические условия и
др.;
ПК-11 – готовность
к
разработке
технических
заданий
на
проектирование приспособлений, оснастки и специального инструмента,
предусмотренных технологией.
4. ТЕХНИЧЕСКОЕ ЗАДАНИЕ
НА МЕЖДИСЦИПЛИНАРНЫЙ ПРОЕКТ
В техническом задании (ТЗ) каждый студент получает исходные данные
для расчета характеристик гироскопической вертикали, которые должны
обеспечить изменение с заданной точностью углов крена и дифферента
подвижного объекта (ПО), на котором установлена гировертикаль. В ТЗ
приведены условия передвижения ПО по поверхности Земли, что позволяет
рассчитать: предельные значения изменения широты
расположения ПО,
максимальных значений линейного ускорения ПО и угловой скорости
виража. Далее студент составляет систему уравнений, описывающую
4
поведение ГВ на подвижном основании и на их основе формирует
математическую модель, с помощью которой исследует поведение ГВ при
предельных параметрах эксплуатации.
На первом этапе анализа уравнений необходимо получить
максимальные значения следующих методических погрешностей ГВ:
погрешность при неподвижном основании;
погрешность при прямолинейном движении с максимальной
скоростью;
погрешность при максимальном линейном ускорении;
погрешность при циркуляции основания с максимальной угловой
скоростью;
постоянную составляющую погрешности ГВ на качающемся
основании;
кардановую погрешность.
Второй этап – анализ инструментальных погрешностей. Для их
определения сначала производится расчет кинематического момента ГВ и
массы ротора, а затем с учетом данных, приведенных в ТЗ, моделируется
поведение ГВ для определения систематических значений постоянных
составляющих следующих инструментальных погрешностей:
погрешность от смещения центра тяжести ГВ;
погрешность от момента сил сухого трения в осях карданова подвеса
ГВ;
погрешности от неточности установки индикаторов горизонта;
погрешность, вызванная вибрацией основания.
По результатам моделирования определяется максимальная суммарная
погрешность ГВ по каждой из осей. Если погрешность превышает заданную
на ТЗ, определяются параметры отклонения для каждой из систем
корреляции ГВ, обеспечивающие выполнение ТЗ, т. е. производится расчет
максимального значения линейного ускорения ПО и/или максимального
значения угловой скорости циркуляции, при которых отключается
продольная и/или поперечная системы коррекции ГВ. На заключительном
этапе производится выбор датчиков момента, обеспечивающего работу
систем коррекции.
5
Результаты проекта предоставляются в виде пояснительной записки,
которая должна быть выполнена в соответствии с шаблоном, размещенным
на сайте СПбГЭТУ «ЛЭТИ».
5. ВЫВОД УРАВНЕНИЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ
5.1. Общая характеристика
Гировертикали (ГВ) – это гироскопические приборы, которые
пространственным положением главной оси гироскопа воспроизводят на
борту подвижного объекта в месте его нахождения направление земной
вертикали.
ГВ используют для определения углового положения (ориентации)
подвижного объекта относительно плоскости горизонта, то есть для
определения углов дифферента и крена корабля, углов тангажа и крена
самолета или аналогичных углов других подвижных объектов.
ДM2
(0)
r
ДM1
(0)
M1
M2
ДУ1
ДУ2
Рис. 5.1. Траектория коррекционного
движения ГВ
Рис. 5.2. Схема ГВ с радиальной
коррекцией
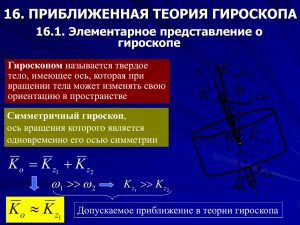
В настоящее время обычно применяют гировертикали с радиальной
коррекцией. Их название связано с важной практической особенностью
после включения прибора при произвольном начальном отклонении от
положения равновесия главная ось гироскопа под действием системы
коррекции кратчайшим путем (на фазовой плоскости – по радиусу r)
движется к направлению вертикали (рис. 5.1). Наиболее распространена
схема ГВ с радиальной коррекцией (рис. 5.2), которая построена на базе
трехстепенного астатического гироскопа в карданном подвесе. Оси подвеса –
горизонтальны, главная ось гироскопа – вертикальна. Наружную ось подвеса
ориентируют параллельно продольной оси объекта. На кожухе гироскопа
устанавливают два маятниковых чувствительных элемента M1 и M 2 (или
6
один двухосный маятниковый чувствительный элемент) с электрическим
выходом. Их сигналы используют для коррекции гироскопа.
Маятниковый элемент M1 выдает сигнал, зависящий от наклона главной
оси гироскопа относительно вертикали, вызванного поворотом гироскопа
вокруг оси наружной рамки подвеса. Маятниковый элемент M 2 дает сигнал,
зависящий от наклона гироскопа, вызванного поворотом вокруг оси
внутренней рамки. Сигнал маятникового элемента M1 подается на датчик
момента
ДМ1 , установленный на оси внутренней рамки, а сигнал
маятникового элемента M 2 – на датчик момента ДМ2 , установленный на оси
наружной рамки.
В ГВ с радиальной коррекцией при повороте гироскопа вокруг
наружной оси подвеса с помощью датчика момента ДМ1 создается момент
вокруг внутренней оси подвеса. Этот момент вызывает прецессионное
движение гироскопа вокруг наружной оси подвеса, которое прекращается,
когда сигнал маятникового элемента обратится в ноль, т. е. когда главная ось
гироскопа совместится с вертикалью.
Mк
Mк
Mк
а
,
,
,
б
в
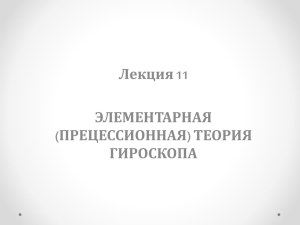
Рис. 5.3. Виды характеристик системы коррекции
Рассмотренные ГВ с радиальной коррекцией по виду характеристики
системы коррекции (зависимости коррекционного момента
Mк ,
развиваемого датчиком момента, от угла рассогласования между главной
осью гироскопа и маятниковым чувствительным элементом) делятся на
гировертикали с пропорциональной (линейной) коррекцией (рис. 5.3, а), с
постоянной (релейной) коррекцией (рис. 5.3, б) и со смешанной (линейной с
насыщением) коррекцией (рис. 5.3, в).
5.2. Уравнения движения ГВ
7
При составлении уравнений движения ГВ ограничимся учетом только
прецессионного движения гироскопа, поскольку нутационные составляющие
движения практического значения не имеют. Эти составляющие,
отображающие собственное движение гироскопа, необходимо учитывать
лишь при наличии внешних возмущений, изменяющихся с частотой, близкой
к частоте нутационных колебаний гироскопа, или при анализе устойчивости
системы.
Хотя ГВ с радиальной коррекцией представляют собой замкнутые
динамические системы, их устойчивость обеспечивается без использования
каких-либо специальных средств вследствие малой скорости коррекционного
движения, т. е. малого значения общего коэффициента передачи элементов,
образующих замкнутую систему.
В качестве опорной используется система координат, ориентированная
по траектории. В этом случае углы
отклонения главной оси гироскопа
от вертикальной
оси
определяют
непосредственно погрешности прибора,
следовательно, эти углы будут малыми.
С другой стороны, ориентация осей по
траектории адекватна расположению
осей карданова подвеса прибора на
подвижном объекте.
xyz
Положение осей Резаля
Рис. 5.4. Кинематичекий
чертеж
относительно
выбранной
опорной
системы координат о (рис. 5.4)
определяют два угла: угол поворота гироскопа вокруг оси подвеса
наружной рамки и угол поворота вокруг оси подвеса внутренней рамки
(кожуха гиродвигателя).
Составляющие абсолютной угловой скорости поворота опорной
системы координат определяются выражениями:
̇
8
где – горизонтальная составляющая линейной скорости объекта; K – курс;
– широта места.
Для составления уравнений движения ГВ используется метод Лагранжа.
При составлении уравнений прецессионного движения вместо полного
выражения кинетической энергии вращательного движения подвижной части
прибора используем выражение кинетической энергии Tz вращательного
движения только вокруг главной оси z гироскопа. Пренебрегая массой
наружной рамки и кожуха гироскопа, получим:
̇)
̇
(5.1)
(
где J – осевой момент инерции ротора.
Составим сначала уравнение движения по координате , используя (5.1):
̇)
(
̇
̇
Координата – циклическая, т. е.
Tz
0.
Поэтому в установившемся режиме
̇
Следовательно,
̇
[
̇)
(
̇]
Обозначим эту постоянную величину через H, т. е.
Jz H .
(5.2)
Перейдем к составлению уравнения движения по координате с учетом
(5.2):
̇
̇
(
)
9
Следовательно, уравнение движения по координате будет выглядеть
следующим образом:
(5.3)
( ̇
)
где M – момент внешних сил, действующих на гироскоп вокруг оси
подвеса наружной рамки.
Составим уравнения движения по координате :
̇
(
̇)
(
)
Следовательно, уравнение по координате таково:
( ̇
)
(5.4)
где M x – момент внешних сил относительно оси x подвеса внутренней рамки.
После линеаризации тригонометрических функций и , если их
значения малы, уравнения (5.3) и (5.4) получат следующий вид:
( ̇
)
(5.5)
( ̇
)
mW
mW
mW
mg
Рис. 5.5. Силы, действующие
на маятниковый элемент системы
коррекции
Не
учитывая
собственных
колебаний маятниковых элементов,
будем считать, что они в любой момент
времени
занимают
положение
динамической
вертикали.
Для
составления аналитических выражений
коррекционных моментов определим
сначала углы отклонения маятников
относительно вертикали. Считаем, что
известно ускорение объекта в опорной
системе
координат
в
виде
составляющих
. Маятник
будет испытывать действие силы
mg
тяжести
и
силы
инерции
,
10
направление
которых указано на рис. 5.5. Как следует из рисунка, поворот маятника
вокруг оси положительный и определяется (если угол отклонения мал) по
формуле
где
.
Угол поворота маятника вокруг оси ζ, совпадающей с точностью до
малого угла с осью x , отрицательный, β = Wη/ . Следовательно, углы
рассогласования между главной осью гироскопа и маятниками:
Для ГВ с постоянной (релейной) коррекцией коррекционные моменты
можно записать в виде
(
)
(5.6)
(
)
где M к x , M к const .
Двойной знак коррекционного момента соответствует двум возможным
вариантам включения системы коррекции. Один знак соответствует
правильному включению системы коррекции, когда коррекционное
движение устойчиво, т. е. когда коррекционный момент вызывает
уменьшение начального рассогласования между гироскопом и маятником;
второй знак соответствует неправильному включению, неустойчивому
коррекционному движению, когда коррекционный момент увеличивает
начальное рассогласование между гироскопом и маятником.
Уравнения движения ГВ с постоянной (релейной) коррекцией (рис.5.3,
б) можно представить в виде
( ̇
)
(
)
(5.7)
( ̇
)
(
11
)
Уравнения движения ГВ с пропорциональной коррекцией (рис. 5.3, а)
имеют следующий вид:
( ̇
ζ
)
(
)
(5.8)
( ̇
ζ
)
(
)
5.3. Упрощения уравнений при анализе поведения ГВ
на подвижном основании
Уравнения движения ГВ (5.7) и (5.8) с учетом выбранных знаков
коррекционных моментов, соответствующих устойчивому коррекционному
движению гироскопа, в размерности угловой скорости получают следующий
вид:
W
к1 sign
;
g
1
(5.9)
W
к 2 sign
,
g
1
̇
(
)
(5.10)
̇
где
к 1 M к H , к 2 M к x H
(
)
– постоянные скорости коррекции
гироскопа вокруг осей подвеса внутренней и наружной рамок;
удельная скорость идеальной системы коррекции.
Уравнения движения ГВ (5.9) и (5.10) представляют собой систему двух
уравнений. С учетом предполагаемой малости углов и связь между
уравнениями движения выражена членами , и, следовательно,
взаимовлияние отклонений гироскопа по одной оси и движения по другой
при перемещении объекта по ортодромии, когда
sin , или
v sin K
tg – слабое ( K – курс). Этого нельзя
R
сказать про случай, когда объект совершает вираж (циркуляцию). При
локсодромии, когда sin
12
циркуляции слагаемое K , входящее в (раздел 5.2), может быть большим и
взаимосвязь – сильной.
В связи с изложенным будем пренебрегать членами и , когда
объект движется «прямолинейно», т. е. по ортодромии или локсодромии, и
будем считать K в , если объект совершает вираж (циркуляцию).
При учете влияния ускорений объекта будем принимать во внимание
только составные составляющие ускорений: для – ускорение, связанное
с изменением величины скорости объекта, для – осестремительное
ускорение при его вираже (циркуляции), равное произведению vK .
Кориолисовы ускорения, а также осестремительные ускорения от движения
объекта вдоль сферической поверхности Земли учитывать не будем.
Кроме того, при анализе влияния той или иной причины погрешности
прибора не будем учитывать влияние других причин погрешностей, т. е. при
рассмотрении погрешностей будем использовать принцип суперпозиции.
Такой подход позволяет существенно упростить анализ различных причин
погрешностей и делает полученные результаты наглядными.
5.4. Поведение ГВ при отсутствии ускорений объекта
Для выяснения характера коррекционного движения ГВ с постоянной
коррекцией рассмотрим сначала ее поведение на абсолютно неподвижном
основании. Для этого случая уравнения (5.9) вырождаются в следующие
простые:
к1 sign ;
к 2 sign .
(5.11)
После интегрирования (5.11) получим:
(0) к1t sign ;
(0) к2 t sign ,
(5.12)
где (0), (0) – значения и при t 0 .
С целью получения уравнения траектории коррекционного движения
гироскопа, т. е. траектории, изображающей точки на фазовой плоскости,
исключим из уравнений (5.12) время:
13
(0) к 2 sign
.
(5.13)
(0) к1 sign
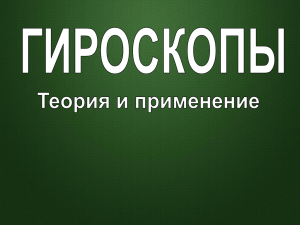
Как следует из (5.13), траектория коррекционного движения на фазовой
плоскости представляет собой прямую, проходящую через точку (0), (0) .
Крутизна наклона этой прямой определяется
отношением
(рис. 5.6).
При
к 2 к1
к1 к 2 наклон траектории составляет 45 к
Рис. 5.6. Семейство траекторий
коррекционного движения ГВ
с постоянной (релейной)
коррекцией
осям координат при отклонении оси гироскопа
от вертикали по обеим осям. Если гироскоп
отклонен от вертикали только по одной оси,
траектория
коррекционного
движения
совпадет с этой осью (рис. 5.6).
В ГВ с постоянной коррекцией
отсутствуют
скоростные
погрешности,
поскольку
к 1 , к 2 , .
повороте плоскости горизонта со скоростями
и
При
маятники
поворачиваются вместе с поворотом плоскости горизонта. При отставании
главной оси гироскопа от положения маятников на угол, превышающий
порог чувствительности системы коррекции (при идеальной релейной
характеристике этот угол равен нулю), происходит включение системы
коррекции и отставание гироскопа устраняется. Ось гироскопа прерывистым
(«скользящим») движением следит за положением маятников.
Поведение ГВ с дифференциальной системой коррекции предлагается
рассмотреть студентами самостоятельно [2], [3]. В последующем будем
пользоваться упрощенными уравнениями, в которых не учитывается влияние
, и предполагается в .
5.5. Поведение ГВ при равноускоренном движении объекта
постоянным курсом
Предположим, что вектор линейной скорости объекта лежит в его
продольной плоскости, т. е. угол скольжения (дрейфа) объекта равен нулю.
Тогда упрощенная математическая модель движения прибора приобретает вид
14
W
к1 sign
;
g
1
к 2 sign ,
(5.14)
где по условию W v const .
Влияние продольного ускорения W v объекта отображает только
первое из уравнений (5.14). Считая W g1 0 , интегрированием этого
уравнения как линейного получим:
к1 t C.
(5.15)
Будем считать, что постоянное ускорение v const имеет место
в интервале времени от t 0 до t и равно нулю за пределами этого
интервала (рис. 5.7, а). Если предположить, что при t 0 , (0) 0 , из
(5.15) получим C 0 . Следовательно,
к1 t.
Если к1 v g , то ось гироскопа достигнет наибольшего отклонения
при t . Это наибольшее отклонение
(рис. 5.7, б) определяется выражением
(5.16)
к1.
W
0
При t ускорение обратится в нуль.
Маятник возвратится к истинной вертикали.
Под действием коррекционного момента
будет возвращаться к вертикали со скоростью
к1 и ось гироскопа. Для этого участка
уравнение движения получит следующий
вид:
к1 sign ,
(5.17)
t
а
0
max
v
м
g
t
б
откуда
к1(t ) sign C.
0
Поскольку при t , к1, получим
sign 1 , C к1 . Следовательно, при
t движение гироскопа происходит по
закону:
к1 t к1(t ).
15
v
g
t
в
Рис. 5.7. Характер изменения
погрешности ГВ с постоянной
коррекцией при равноускоренном
движении объекта
После достижения значения 0 движение в соответствии с (1.15)
прекратится.
Если к1 v g , решение (5.15) справедливо лишь на интервале
v
(рис. 5.7, в).
g
В этом случае на интервале времени 0 t t1 ось гироскопа будет
v
удерживаться системой коррекции в положении max м . Если
g
допустить, что произошло отклонение гироскопа на угол, превышающий
v
отклонение маятника м , то при этом произойдет изменение знака
g
времени 0 t t1 , где t1 удовлетворяет условию к1 t1
v
сигнум-функции, следовательно, изменение знака
g
сигнум-функции и знака скорости к1 , и ось гироскопа возвратится к
аргумента м
отклонению маятника.
После прекращения действия ускорения, т. е. при t , ось гироскопа со
скоростью к1 , как и в предыдущем случае, возвратится к истинной
вертикали вслед за возвращением к ней маятника.
Заметим, что время движения объекта с постоянным ускорением
обратно пропорционально величине его ускорения v , по крайней мере для
объектов, движущихся в среде с конечной плотностью. Действительно, среда
v2
с плотностью оказывает сопротивление с силой F
(при учете только
2
скоростного напора). Поэтому при ограниченной силе, развиваемой
движителем (гребным или воздушным винтом), максимальное значение
скорости vmax объекта также ограничено, поэтому максимальное
приращение скорости v при движении объекта с ускорением v ограничено
условием
vmax vmax . Время существования постоянного ускорения
объекта определяется отношением v v .
Следовательно, погрешности ГВ в рассматриваемых условиях малы как
v
при малых ускорениях вследствие малости отклонения маятника м ,
g
16
так и при больших ускорениях вследствие малости времени существования
больших ускорений и малости углов отклонения гироскопа за время .
Очевидно, что существует некоторое значение ускорения, его называют
критическим, при котором погрешность ГВ с постоянной коррекцией будет
v
v
максимальной. Поскольку max к1 к1 , м , а max м , то
g
v
критическое ускорение vкр соответствует предельному случаю max м .
Отсюда получим
к 1
vкр
v
vкр
g
и, следовательно,
vкр к1 vg .
(5.18)
Поведение ГВ с релейной коррекцией подробно рассмотрено [2], [3].
При v vкр к концу интервала времени ось гироскопа достигает
отклонения, равного отклонению маятника. Максимальная погрешность
прибора при критическом ускорении определяется с учетом (5.18) по
формуле
vкр
к1 v
max м
.
g
g
Можно отметить два простых пути уменьшения влияния продольных
ускорений объекта: 1) уменьшение скорости продольной коррекции;
2) выключение продольной коррекции гироскопа на время действия
ускорения.
Выясним, какие факторы ограничивают снизу величину скорости
коррекции к1 . Естественно, что скорость коррекции гироскопа должна быть
не меньше суммарной скорости его динамического и кинетического ухода,
т. е. ухода, обусловленного влиянием остаточных вредных моментов, и ухода
относительно земной системы координат, вызванного вращением самой
земной системы координат. Если это условие не выполняется, система
коррекции будет не в состоянии выполнять свое функциональное назначение.
17
5.6. Поведение ГВ при правильном вираже (циркуляции) объекта
Для решения рассматриваемой задачи используем уравнения движения
(5.7), но предварительно их упростим. С учетом малости угловых скоростей
и по сравнению с постоянными угловыми скоростями коррекции к1
и к2 , будем пренебрегать влиянием скоростей , . Угол скольжения
(дрейфа) объекта считаем равным нулю, т. е. полагаем, что вектор скорости
совмещен с продольной плоскостью объекта ( v v; v 0 ). С учетом
неравенства sin , v sin K R в считаем в .
Для этих условий W 0 , W vв (при левом вираже, т. е. при в 0 ,
вектор осестремительного ускорения совпадает с отрицательным
направлением оси , он направлен к левому борту объекта).
С учетом сделанных упрощений уравнения движения прибора в
условиях правильного виража можно представить:
в к1 sign ;
в к2 sign ( в ),
(5.19)
где в W g vв g – угол отклонения маятника от вертикали при
вираже объекта (если условие малости угла в не выполняется, следует
пользоваться формулой в arctgvв g ).
Члены правой части системы уравнений (5.19) – нелинейные функции
переменных и и параметров движения объекта. Это делает уравнения
(5.19) нелинейными и не позволяет составить их решение в общем виде.
Однако нелинейность сигнум-функций проявляется лишь при нулевом
значении аргументов, таким образом, при в 0 и 0 . При других
значениях аргументов эти функции обращаются в положительную или
отрицательную единицу, т. е. нелинейных свойств не проявляют.
С учетом этой особенности получим решение уравнений (5.19) как
линейных для значений переменных, удовлетворяющих условиям
в , 0 ,
(5.20)
и дополним эти решения качественным анализом выполнения условий (5.20)
и установления знаков аргументов в и сигнум-функций на различных
участках движения гироскопа. Для участков движений, где одно или оба
18
условия (1.18) не выполнены, определим движение гироскопа также на
основе качественного анализа уравнений (1.17).
Воспользуемся комплексной переменной x j . С этой целью
умножим первое уравнение на j 1 и сложим со вторым:
x jв x к 2 sign ( в ) jк1 sign .
(5.21)
Решение уравнения (5.21) для участков движения, на которых
аргументы сигнум-функций знакоопределены:
x (C1 jC2 )e jвt к1 sign j к 2 sign ( в ).
в
в
После замены, согласно формуле Эйлера, показательной функции
тригонометрическими получим:
x (C1 jC2 )(cos вt j sin вt ) к1 sign
в
j к 2 sign ( в ).
в
(5.22)
В исходных переменных и решение (5.22) примет следующий вид:
C1 cos вt C2 sin вt к1 sign ;
в
(5.23)
к 2
C1 sin вt C2 cos вt
sign ( в ).
в
Для определения постоянных интегрирования зададим начальные
условия. Предположим, что перед началом виража объекта главная ось
гироскопа совпадает с вертикалью места, т. е. при t 0
(5.24)
Однако при выбранных начальных условиях не выполняется первое из
условий (5.20). Следовательно, воспользоваться выражениями (5.23) для
определения постоянных интегрирования нельзя. Проведем качественный
анализ характера движения гироскопа при начальных условиях (5.24).
Из уравнений (5.19) следует, что в начальный момент после появления
виража с учетом (0) (0) 0 возникает движение гироскопа по
координате со скоростью
̇ =
.
(5.25)
Действительно, из второго уравнения (5.19) видно, что в начальный
момент
19
sign ( в ) sign sign
vв
1.
g
С учетом того, что член в в начальный момент равен нулю,
поскольку
(0) 0 ,
получаем
выражение
(5.25),
т. е.
накопление
отрицательного угла
с постоянной скоростью к2 .
Каким будет движение по координате ? Из первого уравнения
системы (5.21) следует, что в начальный момент, т. е. при в 0 и 0 ,
система коррекции не включена, 0 . Следовательно, движение по
координате отсутствует.
Действительно, в начальный момент времени, т. е. при в 0 ,
движение гироскопа по углу определяется выражением
к1 sign .
(5.26)
Если в силу тех или иных причин появляется сколько угодно малый угол ,
отличный от нуля, например положительный ( 0 ), тотчас включается
система коррекции к1 , устраняющая положительный угол . При
отрицательном малом угле появится, согласно (5.26), положительная
скорость к 1 , также устраняющая угол .
Выясним, как изменится характер движения гироскопа по координате
с учетом члена в по мере накопления угла .
Перепишем для этого первое уравнение системы (5.19) в виде
в к1 sign .
(5.27)
При увеличении со временем отрицательного угла ( 0 ) член в в
выражении (5.27) создает отрицательную скорость . Но при появлении угла
, удовлетворяющего условию 0, 0 , включается система коррекции,
появляется положительная скорость коррекции
к1 , устраняющая
накопившийся отрицательный угол . Следовательно, при достаточно малых
значениях угла , т. е. при условии в к1 , отклонение гироскопа по
координате практически нулевое.
Характер движения изменится, когда нарастание отрицательного угла
приведет к нарушению условия в к1 . При достаточно большом (по
20
модулю) значении угла , т. е. при в к1 , система коррекции уже не в
состоянии удерживать гироскоп в положении 0 . В этом случае знак
правой
части
равенства
(5.27)
определяется
знаком
члена
в .
Следовательно, при отрицательном значении , удовлетворяющем условию
к1 в , появятся отрицательная скорость и отрицательный угол
0 . Это произойдет при 1 , где 1 к1 в , т. е. при t t1 , где t1
удовлетворяет условию к2 t1 1 , а значит,
поскольку накопление угла
постоянной скоростью к 2 .
t1
к1
,
к2 в
происходило с нулевого значения с
Таким образом, при t t1 первое условие (5.20) выполняется. Если при
этом второе условие (5.20) выполняется по-прежнему, т. е. в , то
аргументы обеих сигнум-функций знакоопределены и дальнейшее движение
происходит в соответствии с решениями (5.23).
Поскольку выражения (5.23) отображают движение гироскопа лишь
начиная с момента времени t t1 , перепишем их в следующем виде:
C1 cos в (t t1) C2 sin в (t t1) к1 sign ;
в
C1 sin в (t t1) C2 cos в (t t1) к 2 sign ( в ).
в
(5.28)
Постоянные интегрирования в (5.28) можно определить из условий при
t t1 : (t1) 1 к1 в , (t1) 0 .
После подстановки этих значений в (5.28) получим:
к1 C1 к1 sign ;
в
в
0 C2 к 2 sign ( в ).
в
(5.29)
Для рассматриваемого участка движения при t t1 , как было показано
при качественном анализе, угол отрицателен. Поэтому sign 1 .
В предположении в с учетом в 0 получим ( в ) 1. С учетом
21
приведенных
значений
сигнум-функций
из
(5.28)
найдем:
C1 0 ,
C2 к 2 в . Из выражений (5.28) для этого участка движения следует:
к 2 sin в (t t1) к1 ;
в
в
(5.30)
к 2 cos в (t t1) к 2 .
в
в
Исключив из выражений (5.30) время, получим следующее уравнение
траектории движения вершины гироскопа на фазовой плоскости:
2
2
2
(5.31)
к1 к2 к 2 .
в
в
в
Траектория представляет собой окружность с радиусом к 2 в . Центр
окружности в соответствии с (5.31) имеет координаты
ц к1 ; ц к 2 .
в
в
Для к1 к 2
траектория показана на рис. 5.8. При к 2 к1
окружность дважды пересекает ось , а при к 2 к1 – не доходит до оси
.
в
к1
в
При правом вираже объекта, т. е. при
в , угол отклонения маятника от истинной
вертикали
положительный.
Вершина
гироскопа вначале перемещается вдоль
положительного направления оси , а при
достижении значения 1 к1 в начинает
движение по окружности, лежащей в
0
квадранте, ограниченном положительной
к2
в
полуосью и отрицательной полуосью .
Рис. 5.8. Траектория движения
Пользуясь рис. 5.8, нетрудно составить
вершины гироскопа при вираже
формулы максимальных погрешностей:
объекта для случая в
1
max
(к1 к 2);
в
(5.32)
2к 2
max
.
в
22
По виду формул (5.32) не следует делать вывод о достижении
погрешностями весьма больших величин при малой угловой скорости
виража. Следует помнить, что показанная на рис. 5.8 траектория движения
гироскопа получена для max в . При малой угловой скорости в угол
отклонения маятника от вертикали также мал, и формулы (5.32) несправедливы.
Если при движении по окружности (рис. 5.8) ось гироскопа достигает по
координате отклонения, равного углу отклонения маятника, т. е. наступает
равенство в , нарушается второе условие (5.19). При этом для
определения характера дальнейшего движения гироскопа нельзя
пользоваться выражениями (5.30). Приходится снова определять характер
движения на основе качественного анализа уравнений (5.19).
С этой целью перепишем (5.19):
в к1 sign ;
(5.33)
в к 2 sign ( в ).
По первому из уравнений (5.33) легко определить скорость изменения
угла при в . Поскольку на рассматриваемом участке движения 0 ,
0 и 0 : в к1 .
В этом выражении первый член правой части по модулю больше
второго, поэтому знак – отрицательный. Следовательно, отрицательный
угол продолжает нарастать по модулю. Рассмотрим, как будет изменяться
угол
после
достижения
значения
в vв g .
Для
этого
проанализируем второе уравнение системы (5.33). При в выключится
система коррекции, т. е. к 2 обратится в нуль. Первый член правой части
рассматриваемого уравнения с учетом отрицательного значения угла
( 0 ) даст положительную скорость изменения : в () , т. е.
отрицательный угол будет по модулю уменьшаться. Но как только угол
станет меньше в , снова включится система коррекции, которая
создаст отрицательную скорость к 2 , превышающую положительную
в . Следовательно, система коррекции сохранит угол равным в .
Однако отрицательный угол
постоянной скоростью в
по модулю будет увеличиваться с
vв
к1 , и в некоторый момент времени
g
23
(обозначим его t 2 ) первый член правой части второго уравнения системы
(5.33) –
в
достигнет по модулю значения
к 2
и продолжит
увеличиваться. Начиная с момента t t2 система коррекции уже не сможет
удерживать угол равным в , поскольку член в () по модулю
превысит к 2 . Следовательно, при t t2 : 0 , в .
При отрицательном значении в ( в vв g ) будет справедливо
неравенство в 0 и снова обеспечится знакоопределенность аргументов
обеих сигнум-функций: 0 , в 0 , т. е. при t t2 справедливы
равенства sign 1 , sign( в ) 1 .
Воспользуемся поэтому снова решениями (5.23) для t t2 . Перепишем
эти решения в следующем виде:
C1 cos в (t t1) C2 sin в (t t1) к1 ;
в
C1 sin в (t t1) C2 cos в (t t1) к 2 .
в
(5.34)
Постоянные интегрирования C1 и C2 определим, исходя из следующих
граничных условий: при t t2 (t2 ) в vв g ; (t2 ) к2 в .
После подстановки этих условий в (5.23)
C1 в к1 ; C2 0.
в
(5.35)
С учетом (5.35) выражения (5.34) перепишем в следующем виде:
в к1 cos в (t t1) к1 ;
в
в
в к1 sin в (t t1) к 2 .
в
в
Уравнение траектории для рассматриваемого участка движения:
2
2
2
к1 к 2 в к1 .
в
в
в
24
(5.36)
Таким образом, при t t2 , начиная с точки (t2 ) в , (t2 ) к2 .
в
Вершина гироскопа движется по окружности радиусом
vв к1
, центр
g
в
которой в соответствии с (5.36) имеет координаты ц к1 и ц к2 .
в
в
В целом траектория движения в рассматриваемом случае, т. е. при
в
к1 к 2
, состоит из следующих участков (рис. 5.9): отрезок прямой,
в
в
совпадающий с отрицательным направлением оси ; дуга окружности
к 2
радиуса
; отрезок прямой, параллельный оси , соответствующий
в
в
ординате
vв
;
g
окружность
vв
g
в
0
vв к1
.
g
в
к1
в
к1
в
радиуса
к2
в
0
Рис. 5.9. Траектория движения вершины
гироскопа при вираже объекта для случая
Рис. 5.10. Траектория движения
вершины гироскопа при вираже объекта
в к1 в к 2 в
для случая к1 в в
В этом случае, как видно из рис. 5.9, максимальные погрешности прибора
определяются выражениями max
vв
v
, max к 2 в к1 .
g
в
g
в
Возможен, наконец, третий случай, когда угол в отклонения маятника
от вертикали весьма мал и ось гироскопа достигает угла отклонения
25
маятника, находясь на первом прямолинейном участке траектории, т. е.,
когда
к1
в .
в
В такой ситуации после достижения гироскопом отклонения в
дальнейшее его движение прекращается. Системы коррекции удерживают
v
гироскоп в положении max в в , max 0 (рис. 5.10).
g
Из полученных формул максимальных значений виражных
погрешностей рассматриваемой ГВ видно, что эти погрешности малы как
при больших, так и при малых угловых скоростях в виража. В первом
случае погрешность мала потому, что при больших отклонениях маятника
она обратно пропорциональна в . При малых в виражная погрешность
ограничивается углом отклонения маятника, пропорциональным в . Таким
образом, наибольших значений погрешности достигают при средних
значениях ускорений, т. е. средних значениях угловой скорости виража
(малое осестремительное ускорение vв при большой угловой скорости в
практически невозможно, поскольку большая угловая скорость в может
быть достигнута при хорошей управляемости объекта, т. е. при большей
линейной скорости v ). Поэтому можно для заданной скорости v рассчитать
критическую угловую скорость в. кр , при
vв. кр
которой
виражная
погрешность
максимальна. Из сопоставления рис. 5.7 и
5.8
нетрудно
сделать
вывод,
что
критической угловой скорости в. кр
g
к1
в
соответствует случай, когда окружность
траектории радиуса к2 в. кр касается в
0
к 2
в. кр
Рис. 5.11. Траектория движения
вершины гироскопа при вираже
объекта при критической
угловой скорости виража
своей
верхней
точке
линии
в vв. кр g , т. е. при выполнении
условия (рис. 5.11):
vв. кр
1
(к1 к 2) .
g
в. кр
26
Отсюда
в. кр
g (к1 к2)
.
v
Максимальные значения погрешности при
скорости виража можно вычислить по формулам:
max
в. кр
1
в. кр
max
(к1 к2)
в. кр
критической
vв. кр
g
угловой
;
2к2
.
в. кр
Для уменьшения виражных погрешностей целесообразно снижать
скорость коррекции гироскопа. На практике для уменьшения виражных
погрешностей авиационных ГВ используют радикальный способ –
выключение поперечной коррекции на время виража самолета.
Поведение ГВ в условиях виража при пропорциональной коррекции
рассмотрены в [2], [3].
5.7. Поведение ГВ в условиях правильного виража
при выключенной поперечной коррекции
Уравнения движения ГВ с постоянной коррекцией при выключенной
поперечной коррекции:
в к1 sign ;
в 0.
(5.37)
В исходных переменных решение (1.34) имеет следующий вид:
C1 cos вt C2 sin вt к1 sign ;
в
C1 sin вt C2 cos вt.
Подчеркнем, что полученные решения справедливы только на участках
движения, когда 0 . В последующем будем проводить дополнительный
качественный анализ проверки выполнения этого условия.
Определим постоянные интегрирования при произвольных начальных
условиях: при t 0 , (0) , (0) .
Для t 0 найдем:
27
(0) C1 cos вt к1 sign ; C1 (0) к1 sign ; (0) C2.
в
в
Следовательно, при 0 решения по и :
(0) к1 sign cos вt (0)sin вt к1 sign ;
в
в
(0) к1 sign sin вt (0)cos вt
в
(5.38)
или
C12 C22 cos(вt ) к1 sign ;
в
(5.39)
C12 C22 sin(вt ),
где arctgC2 C1 .
Уравнение траектории движения вершины гироскопа на фазовой
плоскости получим в виде:
2
к1
2
2
2
(5.40)
sign
C1 C2 .
в
Траектория движения представляет собой окружность с центром,
к1
sign , и радиусом R ,
смещенным вдоль оси на величину
в
определяемым выражением:
2
R
C12 C22
2
(0) к1 sign (0) .
в
(5.41)
При (0) 0 на начальном участке траектории sign 1 . Центр
окружности траектории движения на начальном участке смещен, согласно
(5.41), в положительном направлении оси (рис. 5.12). Окружность
траектории начинается в точке 1 с координатами (0) , (0) .
После достижения вершиной гироскопа отклонения 0 в точке 2
нарушится условие знакоопределенности сигнум-функций. Для установления
дальнейшего характера движения требуется качественный анализ
уравнений (5.37).
28
Перепишем первое уравнение системы (5.37) в виде
(5.42)
в к1 sign .
Из (5.42) следует, что если в точке 2 отклонение по координате
таково, что первый член правой части
2
в превышает по модулю к1 , то знак
R2
к1
в
скорости будет определяться знаком
в .
На рис. 5.12 для точки 2 к1 в ,
0
(0)
3
к1
в
R1
0 , поэтому 0 . Следовательно, из
точки 2 вершина гироскопа перейдет в
(0)
правую полуплоскость, соответствующую
1
0.
При
этом
условие
Рис. 5.12. Траектория коррекционного
знакоопределенности
сигнум-функции
движения вершины гироскопа ГВ
с
постоянной коррекцией в условиях
снова восстановится. Для участка движения
виража при отключенной поперечной
после точки 2: 0 , sign 1 .
Обозначим t2 момент времени, в
коррекции
который вершина гироскопа достигнет точки 2. Для участка траектории
после точки 2 примем следующие граничные условия: при t t2 , (t2 ) ,
(t2 ) 0 . После замены в выражениях (5.38)(5.41) начальных условий
(0) , (0) на (t2 ) , (t2 ) получим закон движения, уравнение траектории и
радиус окружности для второго участка траектории. Траектория на втором
участке движения – дуга окружности радиусом (t2 ) к1 в с центром,
смещенным вдоль оси на величину к1 в . Второй участок траектории
заканчивается в точке 3, когда снова 0 . В случае, изображенном на
рис. 5.12, точка 3 лежит внутри отрезка оси , заключенного между к1 в
и к1 в . При этом дальнейшее движение оси гироскопа прекратится, что
следует из выражения (5.35). Член в в этом выражении порождает
положительную ( 0 ) или отрицательную ( 0 ) скорость . Однако при
накоплении положительного или отрицательного угла включается система
коррекции, т. е. появляется постоянная скорость коррекции к 1 , знак
которой противоположен знаку угла , а величина превышает в . В
29
результате накопившийся угол превращается в нуль. Иначе говоря, после
попадания оси гироскопа в область, определяемую координатами
к1 в к1 в , 0 , система продольной коррекции «захватывает»
гироскоп и заставляет его поворачиваться вместе с объектом. Относительно
объекта положение гироскопа остается неизменным.
При малой угловой скорости в зона «захвата» может быть весьма
широкой. При этом максимальное установившееся отклонение гироскопа по
координате не ограничивается углом отклонения в маятника от
вертикали, поскольку поперечная коррекция отключена.
Таким образом, ГВ с постоянной коррекцией в условиях правильного
виража (циркуляции) объекта с нулевым углом скольжения (дрейфа) при
выключенной поперечной коррекции остается невозмущаемой поперечными
ускорениями
объекта
при
нулевых
начальных
отклонениях,
предшествующих виражу, и корректируемой по обеим осям при ненулевых
начальных условиях. Однако начальные отклонения по координате
устраняются не полностью, а только до зоны «захвата», границы которой
к1 в .
При исследовании движения ГВ с пропорциональной системой
коррекции в условиях используются уравнения движения:
̇
При выключения поперечной коррекции во втором уравнении следует
положить равными нулю члены, содержащие . Следовательно, уравнения
движения для рассматриваемого случая:
,
(5.43)
̇
Решим эту систему уравнений.
Из второго уравнения (5.43) следует:
̇.
Отсюда
(5.44)
̇
̈
30
и ̇ в первое уравнение (5.43), получим
Подставив выражения
̈
̇
Предположим, что
.
, решение этого уравнения запишем
в виде
(
√
где
)
.
составим выражение ̇ :
Для получения решения по координате
(
̇
(5.45)
)
(
)
С учетом (5.43) получим
[(
)
(
)
]
(5.46)
Для определения + выберем начальные условия.
Нулевые начальные условия интереса не представляют. При нулевых
начальных условиях последующие отклонения остаются нулевыми,
поскольку уравнения движения (5.43) однородны. Рассмотрим случай
ненулевых начальных условий.
( )
( )
Пусть при
Из решений для момента времени
( )
Следовательно,
( )
(
)
[
( )
( )] .
Полученные решения позволяют сделать следующие выводы.
Начальные отклонения главной оси гироскопа в условиях правильного
виража (циркуляции) объекта затухают по обеим осям; закон убывания
начальных отклонений при достаточно большой угловой скорости виража
экспоненциально-гармонический; частота затухающих колебаний
31
√
зависит от угловой скорости виража и удельной скорости
коррекции; коэффициент затухания начальных отклонений составляет
половину удельной скорости коррекции.
Существенно, что при отключении на время виража поперечной
коррекции гироскоп остается корректируемым относительно обеих осей
благодаря взаимосвязи движения по координатам
.
5.8. Влияние качки на ГВ
При качке и рыскании объекта возникают знакопеременные (с частотой
качки) ускорения, вызывающие раскачивание маятников системы коррекции.
Колебания маятников через цепи коррекции передаются гироскопу – таков
механизм влияния качки на ГВ.
При составлении математической модели влияния качки и получении
формулы для расчета погрешности прибора от качки ограничимся для
простоты одноосной бортовой качкой объекта. Предположим, что вокруг
продольной оси объекта происходит регулярная качка с амплитудой m и
частотой n по закону
Место установки прибора на объекте смещено вдоль нормальной оси
объекта относительно его продольной оси, проходящей через центр масс, на
величину s . Тогда линейное ускорение, обусловленное качкой,
̈
̈
(5.47)
Считая, что объект движется с постоянной скоростью
v 0
и
прямолинейно в 0 , уравнение движения ГВ с постоянной коррекцией
можно записать в виде
W
к 2 sign
g
к1 sign ,
;
(5.48)
где W определяется выражением (5.47).
Второе уравнение (5.48) интереса не представляет. Рассмотрим первое
уравнение. Если главная ось гироскопа выставлена системой коррекции в
32
положении равновесия, то
W
g
. Поэтому уравнение можно переписать в
виде
W
к 2 sign
g
или, с учетом (5.42), в виде
s n2 sin nt
.
к 2 sign m
g
(5.49)
Как видно из (5.49), гироскоп по координате совершает колебательные
движения с постоянной угловой скоростью к 2 . Знак скорости изменяется с
частотой качки объекта.
Наибольшее отклонение гироскопа от положения равновесия, т. е.
наибольшая погрешность прибора, определяется выражением
T
max к 2 к 2 ,
2
n
2
– период качки объекта.
n
Для уменьшения влияния качки на ГВ с постоянной коррекцией
целесообразно уменьшать скорость коррекции гироскопа. При этом надо
отметить, что максимальное значение погрешности не зависит от амплитуды
качки. Постоянная составляющая погрешности при этом равна нулю. Для ГВ
с пропорциональной коррекцией характер погрешности аналогичен.
где T
6. АНАЛИЗ ОСНОВНЫХ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ
ГИРОВЕРТИКАЛИ
6.1. Выбор основных параметров гиродвигателя
Для определения основных инструментальных погрешностей ГВ
(влияние момента сил сухого трения, смещение центра тяжести, неточность
установки чувствительных элементов – индикаторов горизонта) необходимо
знать величину кинетического момента гироскопа H и массу вращающихся
частей гиродвигателя. Отметим еще раз, учитывая упрощенный характер
33
уравнений, которые мы используем, что вся масса подвижной части
гироскопа сосредоточена в роторе.
Проектирование гироприбора начинается с его центрального элемента –
двигателя. Поэтому техническое задание на проектирование ГД составляется
уже в начальной стадии разработки гироприбора.
Габариты проектируемого прибора, а значит и гиродвигателя,
определяются совокупностью конкретных требований, но после того как они
выбраны, задача конструктора – использовать наиболее эффективно
отведенный ему объем (вес).
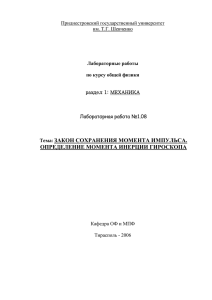
а
б
в
Рис. 6.1. Возможные формы маховиков, вписанные в сферу заданного радиуса
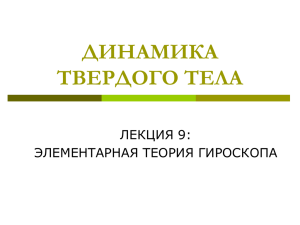
По условиям наиболее рационального использования объема
гироприбора объем ГД, как правило, задается через радиус R или диаметр
сферы, в которую он должен быть вписан (рис. 6.1). Сферический объем,
отводимый для ГД, накладывает ограничения на соотношения его размеров,
и поэтому они находятся в достаточно узких пределах. Под основными
размерами понимаются наружный D и внутренний d диаметры маховика, а
также его длина L. Для того, чтобы по заданному радиусу сферы R
определить основные размеры ГД, необходимо прежде выбрать
соотношение:
и
Это означает, что при выбранном материале маховика
с плотностью
момент инерции ГД во многом уже предопределен
заданным радиусом сферы, следовательно, предопределенным оказывается и
кинетический момент ГД при заданной скорости вращения ротора n.
Для цилиндрического маховика (рис. 6.1) кинетический момент
выражается следующим образом.
34
Через радиус R:
(6.1)
Через наружный диаметр маховика:
[
( ) ]
(6.2)
Радиус сферы связан здесь с наружным диаметром маховика следующим
равенством:
√
Результаты расчетов [5] позволяют рекомендовать рациональные
d
соотношения
, значения которых совпадают с таковыми для реальных
D
d
0,7 0,85
оптимально спроектированных ГД:
D
d
0,8 0,85 выбираются для миниатюрных ГД.
Наибольшие значения
D
Для сверхминиатюрных ГД ротор электродвигателя иногда одновременно
d
d
0,7 0,8 , а
является и маховиком, и здесь условно 1 . Для средних ГД
D
D
для крупных еще меньше.
При изменении длины маховика L и постоянных его диаметрах D и d
пропорционально изменяются вес и кинетический момент ГД. Увеличению
длины препятствуют:
– требование вписываемости ГД в сферу заданного диаметра;
– увеличение температурных деформаций за счет большей длины
теплоотводов и больших градиентов температур;
– ухудшение динамических свойств прибора из-за роста момента
инерции относительно осей рамок.
d
Если постоянен кинетический момент и отношение
, то при
D
L
L
увеличении
диаметр маховика уменьшается в отношении
D
D
L
длина и полная длина статора растут пропорционально
D
35
0,2
, но его
0,8
, а вес –
L
пропорционально
D
0,4
. Механические потери в реальном диапазоне
L
D
практически остаются постоянными.
Для односторонних «сухих» ГД следует выбирать
L
D
0,4 – 0,6, а для
двухстаторных – до 0,8 – 0,9.
Если выбраны соотношения
d L
, и задан радиус R сферы, в которую
D D
должен вписаться ГД, то основные размеры и его кинетический момент
определяются конструктором непосредственно при подчеркивании внешнего
профиля конструкции.
Для маховика в виде цилиндра из материала с плотностью
внешний
параметр по (6.2):
D
0,975 102 H
см,
4
5
L d
nc 1 sн 1 М
D D
(6.3)
В (6.3) не учитывается реальная форма маховика и та доля в
кинетическом моменте, которая создается ротором электродвигателя и
крышками (или диафрагмами), она составляет обычно от 5 до 10 %, а ротора
электродвигателя – 2÷20 % от общего момента инерции всех вращающихся
частей. Поэтому в общем случае их следует учитывать.
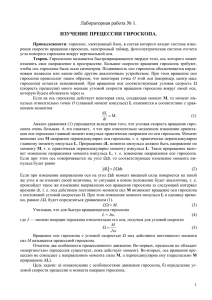
На рис. 6.2 упрощенно показаны наиболее распространенные формы
маховиков: без возможных сносок, скруглений, отверстий для охлаждения,
винтов и пр. При принятых на рис. 6.2 обозначениях (пренебрегаем в силу
малости моментом инерции вала) кинетический момент гиродвигателя
определяется следующим соотношением:
(
( ) [
(
)
)
{[
( ) ]
]}
36
а
б
в
Рис. 6.2. Принципиальные схемы маховиков с роторами электродвигателей обращенного
исполнения
где:
– синхронная скорость вращения;
– номинальное скольжение. Для СГД
, а у АГД
Большие значения
– у миниатюрных АГД и при относительно большом
времени разбега. Для большинства АГД, работающих в воздухе,
, а для работающих в вакууме и легких средах (за исключением
сверхминиатюрных и миниатюрных ГД) – 0,02 – 0,05;
плотности материала маховика, крышек (диафрагмы) и
ротора электродвигателя;
и
выбираются по табл. П2. Для применяемых
3
гистерезисных материалов
7,8 г/см . Средняя плотность ротора с
алюминиевой беличьей клеткой
3
5,5 г/см , а с медной
3
8 г/см ;
отношение наружного диаметра электродвигателя к диаметру его
его статора,
1,41;
толщина крышки или половина толщины диафрагмы;
длина ротора (для ГД с двумя электродвигателями
обозначает
длину двух роторов – рис.6.2).
Толщина крышки обычно составляет
0,05 0,15 см.Крышки
должны быть жесткими, но и достаточно эластичными, чтобы не создавать
37
перенапряжений в подшипниках. Для диафрагмы предъявляются лишь
требования максимальной жесткости и прочности. Ее толщина обычно
0,3
0,6 см (большие значения относятся к большим ГД). Отношение
2bД
L
, а для диафрагмы
для крышек должно быть выбрано в пределах
0,08 0,12.
Длина ротора
для СГД лишь на 0,08 0,2 см превышает длину пакета
статора во избежание возможных их смещений при сборке. У АГД для
достижения наибольшего размера короткозамкнутых колец ротора длина
выбирается максимально возможной по условиям размещения внутри ГД, В
L
среднем для АГД – 2 0,7 0,9 , а для СГД 0,3 0,5.
L
Предварительно масса вращающихся частей ГД (при обращенном
исполнении), г:
{[
( ) ]
( ) [
(
)
̅
]}
(6.4)
6.2. Погрешность от момента сил сухого трения
Рассмотрим влияние моментов сил сухого трения на коррекционное
движение ГВ.
Уравнения устойчивого коррекционного движения с учетом сил сухого
трения в подвесе для ГВ с радиальной системой коррекции:
̇
(6.5)
̇
̇
Уравнения (6.4) можно рассматривать как линейные на участках
движения, где
Нужно лишь дополнительно на основе качественного
анализа установить знак
и
в соответствии со знаками ̇ и ̇ .
Решение этих уравнений как линейных запишем в следующем виде:
̇
̇
38
(6.6)
Постоянные интегрирования определим из начальных условий. Пусть
( ) Для
при
( )
̇
̇
( )
Отсюда
( )
̇
̇
( )
Следовательно, решение (6.6) приобретет следующий вид:
[ ( )
̇]
̇
̇]
[ ( )
̇
(6.7)
Полученные выражения показывают, что с учетом сил сухого трения
главная ось гироскопа приводится системой коррекции не в вертикальное
положение, а в положение, определяемое координатами:
̇
̇
(6.8)
̇ соответствует знакам скорости ̇
̇ на
Здесь функции
̇ и
участке движения перед достижением положения равновесия. Для
̇ продифференцируем выражения (6.7) (если ̇ ̇
определения знаков ̇
).
̇
̇
[ ( )
̇]
̇]
[ ( )
(6.9)
Перейдем к рассмотрению траекторий коррекционного движения по
фазовой плоскости.
Пусть начальное отклонение главной оси гироскопа определяется
( )
координатами ( )
Причем
( )
( )
39
На фазовой плоскости (рис. 6.3) этому начальному отклонению
соответствует точка 1.
Отложим на координатных осях точки, соответствующие, согласно (6.8),
координатам
Для начального участка траектории коррекционного движения знак
квадратных скобок выражений (6.7) определяется законом первого
слагаемого в этих скобках, значит выражения в квадратных скобках
положительны. Следовательно, для начального участка траектории ̇
̇
Отсюда начальный участок траектории представляет собой прямую,
соединяющую начальную точку 1 ( ( ) ( )) с положением равновесия,
определяемым координатами T 1 ; T 2 . Эта прямая показана на
рис. 6.3. Однако после прохождения точки 2 (рис. 6.3) перестает выполняться
условие T 1 , которое использовалось для определения знаков скоростей
̇
̇
ω𝑇
ε
ω𝑇
ε
β
ω𝑇
ε
ω𝑇
ε
η
В связи с этим проведем
повторный
качественный
анализ для определения знаков
скоростей ̇ , ̇ и знаков ,
положения равновесия при
начальных условиях, соответствующих одной из точек
траектории после прохождения
точки 2, а именно, при
0 0; 0 0; 0
0
α( ) β( )
ξα
Рис. 6.3. Траектория коррекционного движения
с учетом моментов сил сухого трения
T 1
.
T 2
;
Пользуясь (6.8), определим
сначала знак ̇ . Знак квадратной
скобки в выражениях ̇ определяется знаком ( ), т. е. он положителен.
Следовательно,
. Поэтому
. Значит, знак квадратной скобки
40
в выражении ̇ положителен. Следовательно, ̇
. Координаты положения
равновесия будут теми же.
После прохождения точки 3 перестает выполняться
. Поэтому
определим знаки ̇ , ̇ и ,
для участка траектории, соответствующего
условиям 0 0; 0 0;
T 2
; 0 T 1 . Из выражения (6.9) для ̇
получим ̇
. Следовательно, ̇
и знаки ,
прежние.
Рассмотренный метод позволяет строить траектории коррекционного
движения вершины гироскопа при любых начальных отклонениях. На рис.
6.4 показано семейство таких траекторий. Прямоугольник с вершинами,
имеющими координаты 0 T 2 ; 0 T 1 (на рис. 6.4 заштрихован),
Рис. 6.4. Семейство траекторий коррекционного движения с учетом
моментов сил сухого трения
определяет зону застоя, образуемую моментами сил сухого трения на осях
подвеса. При начальном отклонении вершины гироскопа, лежащего внутри
этого прямоугольника, коррекционное движение отсутствует. Для
уменьшения зоны застоя целесообразно увеличивать удельную скорость
коррекции.
41
При учете моментов сил сухого трения в подвесе гироскопа для ГВ с
постоянной коррекцией
̇
̇
(6.10)
̇
̇
лишь незначительно изменяется наклон траектории коррекционного
движения (рис. 5.16), поскольку
. Зона застоя от сухого
трения в подвесе гироскопа у ГВ с постоянной коррекцией отсутствует. Это
можно показать, пользуясь (6.9). Рассмотрим, например, первое из этих
уравнений. Если под влиянием момента сил сухого трения
̇
возникает скорость прецессии гироскопа ̇
, то при накоплении
положительного (при ̇
) или отрицательного ( ̇
) угла включается
система коррекции, которая порождает скорость коррекции
, имеющую
знак, противоположный знаку накопившегося угла , а по величине
значительно превышающую
. В результате появившийся угол тотчас
обращается в нуль. Следовательно, при релейной характеристике системы
коррекции ось гироскопа совершает колебания типа «дрожаний» около
положения
равновесия
маятника,
обусловленные
непрерывными
включениями и выключениями цепи коррекции.
6.3. Влияние смещения центра тяжести гировертикали
относительно точки пересечения осей карданова подвеса
Смещение центра тяжести относительно точки пересечения осей
карданова подвеса приводит к возникновению моментов вокруг этих осей. Не
приводя подробных выкладок, если центр тяжести смещен одновременно
вдоль всех трех осей, выразим для моментов
:
(6.11)
где
смещение центра тяжести гироскопа относительно точки
пересечения осей карданова подвеса;
вес гироузла.
Если принять условие, что другие моменты входящие под знак суммы,
отсутствуют, то уравнение движения можно привести к виду:
{
̇
̇
(
)
(6.12)
(
)
или
42
{
̇
(6.13)
̇
Таким образом, можно сказать, что смещение центра тяжести
относительно точки пересечения осей карданова подвеса приводит к тому,
что движение гировертикали становится связанным по углам
. Кроме
этого происходит смещение положения равновесия. Смещение положения
равновесия определяется смещением центра тяжести вдоль осей вращения
колец карданова подвеса в то время как смещение центра тяжести вдоль оси
вращения ротора не приводит к смещению положения равновесия, но
приводит к связанным колебаниям по соответствующим углам.
После некоторых преобразований уравнения движения (6.12) могут быть
приведены к виду (6.13) при условии, что
Отсюда достаточно легко определить как характер движения
гировертикали при произвольном смещении центра тяжести гироскопа
относительно точки пересечения осей карданова подвеса, так и статические
погрешности.
Выражение для статических погрешностей через углы
можно
записать следующим образом:
(6.14)
Динамика движения ГВ, исходя из решения уравнения вида (6.13) может
быть определена решением уравнений при текущих начальных условиях:
̇
̇
где приняты следующие обозначения:
43
Выпишем интересующие нас решения:
(
[
)
[ (
(
]
)
)
(6.15)
]
где приняли обозначение
√
Картина движения вершины гироскопа представлена на рис. 6.5.
Рис. 6.5. Траектория прецесионного движения ГВ при учете смещения центра тяжести
Поведение ГВ с постоянной системой коррекции предлагается для
самостоятельного исследования.
6.4. Ошибки гировертикали от неточности
установки маятниковых акселерометров
При решении вопроса о неточности установки маятниковых акселерометров на внутренних и внешних кольцах карданова подвеса можно
рассматривать задачу исходя из уравнений
44
̇
;
̇
(6.16)
,
где
и
ошибки установки маятниковых акселерометров.
Очевидно, что ошибка в установке маятниковых акселерометров на
внутренних и внешних кольцах карданова подвеса приводит к
соответствующим инструментальным погрешностям ГВ
.
7. РЕКОМЕНДАЦИИ ПО МОДЕЛИРОВАНИЮ ПОВЕДЕНИЯ ГВ
В СРЕДЕ MATLAB/SIMULINK
Математическое описание гироскопического прибора (ГП) представляет
собой систему дифференциальных уравнений, решение которой возможно с
применением численных методов интегрирования. Выбор численного метода
определяется максимальной частотой колебаний, возникающих в
моделируемом гироскопическом приборе; областью устойчивости ГП;
требуемой точностью получаемого решения; интервалом (шагом) времени
интегрирования и т. п.
Динамические процессы в ГП имеют ряд особенностей. Основным
режимом работы являются колебания главной оси гироскопа. Колебательные
процессы обусловлены различными причинами и носят разный характер:
собственные прецессионные колебания, вынужденные колебания (влияние
внешних вибраций, качки основания), сочетания видов колебаний. В рабочих
условиях колебания ГП происходят с несколькими частотами, значения
которых могут значительно отличаться.
Описанные характерные особенности динамических процессов приводят
к необходимости моделировать движение ГП по полным дифференциальным
уравнениям, учитывая весь спектр действующих возмущений.
Решение дифференциальных уравнений, содержащих нелинейности и
разрывные функции, возможно с помощью компьютерного моделирования.
Существует обширный ряд специальных программных средств и пакетов для
построения и изучения моделей сложных систем, например, как Maple,
Matlab, Scilab.
Трудности при разработке и исследовании ГП существенно снижаются,
если систему дифференциальных уравнений представлять в виде
совокупности взаимосвязанных блоков, в которых заложены определенные
45
функции. Разбиение на блоки существенно упрощает проверку правильности
составления модели, повышает эффективность работы с ней.
Приложением, в котором заложен подобный блочный принцип, является
пакет визуального моделирования Matlab/Simulink, предназначенный для
математического моделирования динамических линейных и нелинейных
систем. Исследование характеристик систем начинается с построения схемы–
графической сборки (соединения) элементарных звеньев, блоков, которые
можно выбирать из обширной библиотеки. В результате такого составления
получается функциональная блок-схема, которая называется моделью.
Создание моделей в Simulink достаточно простой процесс, не требующий от
пользователя высокого уровня знаний в программировании и умений в
работе с программным пакетом.
Параметры модели Simulink. Выбор численного метода интегрирования
дифференциальных уравнений гироприбора основывается на определении
типа и порядка метода, шага интегрирования. Тип численного метода и его
параметры определяются исходя из требований к точности воспроизведения
необходимых характеристик моделирования процесса и времени работы
модели.
Поэтому особое внимание при разработке модели ГП необходимо
уделить выбору параметров моделирования (SimulationParameters). Задание
этих параметров выполняется в окне настройки параметров расчета, которое
открывается из меню Simulation→ModelConfigurationParameters или на
панели инструментов
. Окно настройки параметров модели (Solver)
разделено на две части: Simulation time (интервал времени моделирования) и
Solver options (параметры расчета).
В данном окне разработчику предоставляется возможность указать из
выпадающего списка один из известных численных методов интегрирования:
discrete (дискретный), ode45 (одношаговые явные методы Рунге-Кутта 4-го и
5-го порядков), ode23 (одношаговые явные методы Рунге-Кутта 2-го и 3-го
порядков), ode113 (многошаговый метод Адамса-Башворта-Мултона
переменного порядка), ode15s (многошаговый метод переменного порядка
(от 1 до 5), использующий формулы численного дифференцирования) и др.
Для решения дифференциальных уравнений можно установить, например,
такие методы как: discrete, ode45, ode23, ode113 иode15s.
В параметрах расчета также необходимо выбрать шаг интегрирования:
фиксированный (Fixed-step) или переменный (Variable-step). Максимальная
46
величина шагазадается в графе Max Step Size. При Variable-step шаг
автоматически уменьшается, когда возрастает скорость изменения
результатов в процессе решения. И наоборот, шаг увеличивается, если
результаты меняются слабо. Если необходимо получить таблицы результатов
с фиксированным шагом или обрабатывать дискретные сигналы, то
целесообразно использовать Fixed-step. Но для быстроменяющихся
результатов необходимо выбирать малый шаг времени (Fixed-stepsize), что
влечет увеличение времени моделирования.
Интервал времени моделирования задается путем указания начального
(Start time) и конечного (Stop time) значений времени расчета. Как правило,
начальное время указывается равным нулю, а конечное время зависит от
условий поставленной задачи. Время моделирования – величина довольно
условная. Установка значения Stop time = 100 не будет соответствовать
длительности моделирования 100 с. Реальное время моделирования зависит
от многих параметров, в том чиле от быстродействия компьютера.
Список литературы
1. Теория гироскопических устройств: учеб. пособие / В. Б. Давыдов,
В. А. Евгеньев, Ю. А. Торопов и др. СПб.: Изд-во СПбГЭТУ «ЛЭТИ»,
2017. 126 с.
2. Теория гироскопических приборов: учеб. пособие / Н. Т. Виниченко,
Д. А. Кацай, А. А. Лысова. Челябинск: Издательский центр ЮУрГУ,
2010.141 с.
3. Одинцов А. А. Теория и расчет гироскопических приборов. Киев: Вища
шк., 1985. 392 с.
4. Гироскопические системы. Ч. 3. Элементы гироскопических приборов:
учеб. пособие / под ред. Д. С Пельпора. М.: Высш. шк., 1988. 452 с.
5. Делекторский Б. А.,
Мастяев Н. З.,
Орлов И. Н.
Проектирование
гироскопических электродвигателей. М.: Машиностроение, 1968. 252 с.
47
Приложения
1. Индивидуальное задание
ИНДИВИДУАЛЬНОЕ ЗАДАНИЕ № __ /____
на выполнение Междисциплинарного проекта
«Разработка и испытания интегрированных навигационных систем»
Группа № __________, курс ______ Студент(ка)___________________ (ФИО)
Руководитель – ___________________________________________(ФИО)
1. Тема : Расчет погрешности гироскопического прибора
2. Исходные данные:
задание № ___/___ (приложение на 1 л.);
момент сухого трения в каждом подшипнике карданова подвеса ГВ – ___;
источник питания гиромотора – 36 В, 500 Гц;
погрешность установки индикаторов горизонта _______.
3. Содержание пояснительной записки и перечень графического
материала:
1) введение;
2) вывод уравнений движения ГВ и анализ погрешностей;
3) структурная схема математической модели;
4) расчет методических погрешностей ГВ;
5) расчет параметров гиромотора (эскиз ротора);
6) расчет инструментальных погрешностей ГВ;
7) проверка выполнения требования задания по точности ГВ;
8) расчет условий отключения систем(ы) коррекции ГВ;
9) повторная проверка выполнения требования задания по точности;
10) выбор отдельных элементов системы коррекции;
11) заключение.
4. Дата выдачи задания – _________
Дата первой контрольной проверки – _______
Дата второй контрольной проверки– _______
Дата представления оформленного отчета руководителю – _______
Руководитель ___________________
(Подпись)
Студент(ка) ____________________________
(Подпись)
48
ИСХОДНЫЕ ДАННЫЕ К ЗАДАНИЮ №___ / ___
МДП «Разработка и испытания интегрированных навигационных
систем»
Проанализировать
статические
и
динамические
ошибки
гироскопической вертикали, предназначенной для установки на борту
подвижного объекта (подводного аппарата). Требуемая точность измерения
углов крена и дифферента должна быть не ниже __________ . Время
непрерывной работы ≤_____ час.
УСЛОВИЯ РАБОТЫ ГВ
- максимальная скорость движения ________ узлов (км/час);
- набор скорости происходит за время не менее _________ с;
- подводный аппарат может изменять направление движения по дуге
радиусом не менее __________ метров;
- максимальное значение угла дифферента ____________ град;
- максимальное значение угла крена _______________ град;
- качка происходит вокруг продольной оси по гармоническому закону
с частотой _______ Гц, амплитудой _________ град;
- гироприбор расположен внутри корпуса ПО в точке с
координатами: Xс = _____ м; Yс = ______ м; Zс = _______ м.
- на гироприбор воздействует линейная вибрация с амплитудой
_______ мм; частотой _______ Гц;
- начальная широта базирования _____________ .
ОРГАНИЧЕНИЯ НА ПАРАМЕТРЫ ГВ
- ротор ГП должен вписываться в сферу диаметром ________ мм;
- точность балансировки подвеса по всем осям не хуже ____ мкм;
- постоянная/удельная скорость коррекции не более___________
рад/с;
- характеристика коррекции – постоянная/пропорциональная.
Преподаватель ______________________
Подпись
Дата
49
(ФИО)
2. Основные характеристики конструкционных материалов
Прочность
на разрыв
,
Предел текучести
,
Коэффициент
теплового
линейного
расширения
,
Теплопроводность
,
Модуль Юнга
,
Коэффициент
Пуассона
Магнитность
Обрабатываемость
Бериллий
Плотность , г/
Марка
Наименование
Таблица П2
1,85
57
28
11,0
1,46
2,9
0,04
Нет
Удовлетв.
50
Алюминиевые
сплавы
В95
2,8
60
55
23,2
1,17
0,74
0,33
Нет
Удовлетв.
Д16Т
2,8
47
33
22
1,17
0,72
0,33
Нет
Удовлетв.
Сплав титана
ВТ5*
4,5
75-95
70-85
8,0
0,075
1,04
0,33
Нет
Плохая
18ХНВА
7,95
130
90
14,5
0,238
2,04
0,3
Да
Хорошая
4Х13
7,68
114
91
12,6
0,276
2,0
0,3
Да
Хорошая
ШХ15
7,7
68
40
14
0,4
2,1
0,3
Да
Удовлетв.
1Х18Н9Т
7,9
58
24
16,6
0,163
2,0
0,3
Слабая
Плохая
ЭИ395
8,1
88
50
15,1
0,10
2,1
0,3
Нет
Плохая
ЭИ702
7,8
125
90
13,3-13,5
0,135
2,0
0,3
Нет
Плохая
Ковар
Н29К18
8,2
51
40
4,5-5,5
0,192
1,48
—
Да
Хорошая
Инвар
Н36
8,1
50
35
1,1
0,109
1,51
—
Да
—
Стали
Окончание табл. П2
Латунь**
ЛС59-1
8,5
65
45
21
1,05
0,9-1,05
0,3
Нет
Отличная
Тяжелые
сплавы**
ВНМ5-3
17
64
60
5,6
1,0
0,33
—
Нет
Плохая
ВНЖ7-3
17,0
70
65
5,3
0,86
0,34
—
Слабая
Плохая
* Ряд титановых сплавов, здесь не приведенных, имеют близкие свойства
** Используются только для маховиков ГД
51
3. Характеристика датчиков момента
Таблица П3.1
Характеристики датчиков моментов типа ДМ
Наименование
параметра
Напряжение
возбуждения, В
Напряжение
управления (макс),
В
Частота, Гц
52
Ток возбуждения
(макс), А
Ток управления
(макс), А
Момент при
заторможенном
роторе,
Посадочный
диаметр статора,
мм
Посадочный
диаметр ротора, мм
Высота датчика, мм
Масса датчика, кг
ДМ21
Тип датчика
ДМ- ДМ- ДМ45
46
49
ДМ25
ДМ26
ДМ27
ДМ40
ДМ41
36
36
36
36
36
20
110
36
36
36
36
36
20
36
36
36
ДМ58
ДМ60
ДМ65
ДМ66
ДМ67
ДМ68
36
40
36
36
40
36
36
30
10
36
36
110
36
36
500
1000 1000 1000 1000 1000 1000 1000
1000
0,5
0,65 0,3 0,65 0,17 0,55 0,9
1,0
0,25
500
1000 1000 1000 1000
500
500
0,19
0,14
0,35
0,26
0,18
0,12
0,55
0,12
0,14
0,09
0,07
0,25
0,55
0,3
-
0,35
1,0
0,05
0,17
0,27
0,19
0,15
4
8
16
5,5
6
100
60
70
25
60
18
45
200
75
85
34
33
33
33
40
72
68
68
74
58
60
80
80
80
80
4
12
12
12
18
-
7
18
20
33
38
34
18
18
18
15
25
25
30
13
32
26
27
17
30
16
18
36
36
36
0,07
0,07
0,07
0,07
0,06
0,3
0,3
0,3
0,2
0,3
0,1
0,2
0,5
0,5
0,5
Таблица П3.2
Характеристики датчиков момента типа КМ
Наименование
параметра
Напряжение
возбуждения, В
Напряжение
управления
(макс), В
Частота, Гц
53
Ток возбуждения
(макс), А
Момент при
заторможенном
роторе,
Посадочный
диаметр статора,
мм
Посадочный
диаметр ротора,
мм
Тип датчика
КМ-150
КМ-500
КМ-5
КМ-50
КМ-1000
КМ-1500
86
86
86
86
86
86
86
15
15
15
15
15
400
400
400
400
400
400
0,05
0,05
0,2
0,4
0,85
1,1
0,08
0,5
1,5
4,9
9,8
14,7
49
63
96
145
145
182
24
82
60
108
108
182
4. Математическая модель гировертикали
4
Блок
ввода
данных
φ,К,V
Блок расчета
проекций угловых
скоростей на
географическую
систему координат
Блок решения
дифференциального
уравнения
̇ ̇
Блок выработки
моментов
коррекции
̇ ̇
Блок выработки
моментов сил
сухого трения
Блок выработки
моментов от
смещения центра
масс
Блок расчета
влияния качки
Блок вывода
данных
Рис. П.4.1. Обобщенная структурная схема математической модели гировертикали
54
Модель блока исходных данных
Ввести начальные условия в соответствии с заданием в блок «блок
входных данных» и переключить тумблер «1» как показано на рис. П.4.3.
⁄
H,
φ, град.
H,
К, рад.
⁄
ϕ,V,градусы
⁄
К, радианы
⁄
V, ⁄
Xc, м
⁄
m, кг
Xc,
м
Zc, м
m, кг
Yc,
м
Zc,
м
, рад/с
Yc,
, м/м
wk,,рад/с
м/
Weta,, рад/
Н/м
Wksi,, град.
рад/
Мт, Н/м
, град.
, градусы
Δ, град.
Рис.П.4.2. Блок входных данных
55
K
Xc
1/s
m
xc
Zc
dK/dt
K
H
1/s
0
dK/dt
φ
H
V
φ
m
Yc
zc
0
yc
Δ
Wksi
Mт
V
Mт
Wk
dx
Step
Weta
Рис. П.4.3. Структурная схема блока входных данных
Step
Модель блока расчета проекций угловых скоростей
в базовой системе координат
В блоке «Блок расчета проекций угловых скоростей в базовой системе
координат» установить положение тумблеров 2 и 3 как указано на рис. П.4.4.
0
φ
K
0
V
η
R
Рис. П.4.4. Блок расчета проекций угловых скоростей в базовой системе координат
56
V
V/R
R
-1
φ
π/180
cos
K
π/180
sin
π/180
cos
Рис. П.4.5. Структурная схема блока расчета проекций угловых скоростей
в базовой системе координат
Модуль блока выработки моментов коррекции
Подключить нужный блок выработки коррекции в соответствии с
техническим заданием и отключить линейное ускорение и циркуляцию ПО с
помощью соответствующих тумблеров как указано на рис. П.4.6.
57
Ускорение 1
Ускорение
П
58
0
Циркуляция
Линейное ускорение
H
c
c
β
g
Линейное
ускорение
Рис. П.4.7. Структурная схема блока выработки моментов пропорциональной коррекции
59
β
g
Рис. П.4.8. Структурная схема блока выработки моментов постоянной коррекции
60
Модель блока вывода данных
β
(β)
– линейная коррекция
Δ
β – линейная коррекция
β
Формирования области истинного
значения
– релейная
коррекция
β – релейная
коррекция
Рис. П.4.9. Структурная схема блока вывода данных
61
Модель блока выработки моментов сил сухого трения
Добавить моменты сил сухого трения с помощью тумблеров tren_a,
tren_b как показано на рис. П.4.10.
0
Δ
Δβ
0
H
β
0
Блок выработки сил
сухого трения
Рис. П.4.10. Блоки выработки моментов сил сухого трения
̇
H
β
̇
Рис. П.4.11. Структурная схема блока выработки моментов сил сухого трения
62
Модель формирования сигнала одноосной качки
Установить переключатель как на рис. П.4.12 в положение «Качка» и
ввести параметры качки (рис.П.4.13).
0
Качка
Рис. П.4.12. Структурная схема расчета влияния одноосной качки
Рис. П.4.13. Настройка параметров одноосной качки
63
Модель формирования блока выработки моментов сил сухого трения
H
Xc
Смещение
по
β
m
Zc
Смещение
по β
Yc
Рис. П.4.14. Блок выработки моментов от смещения центра тяжести
Δ
H
m
β
g
Δβ
Xc
Zc
Yc
g
Рис. П.4.15. Структурная схема блока выработки моментов от смещения центра тяжести
64
Модуль блока решения дифференциального уравнения
Установить тумблеры как показано на рис. П.4.16.
0
Смещ
ение
ЦТ
Смещение ЦТ
̇
- ̇
β
Смещ
ение
ЦТ
0
Смещение
̇
H
Блок выработки
моментов сил сухого
трения
0
0
Рис. П.4.16. Блок решения системы дифференциальных уравнений
65
Смещение ЦМ
̇
β
Смещение ЦМ
̇
Рис. П.4.17. Структурная схема решения дифференциального уравнения
66
Учет влияния циркуляции
В блоке «блок входных данных» рассчитать ускорение по оси ( ) и
скорость циркуляции(dK/dt).
Установить нулевые начальные условия и установить тумблер 1 как
показано на рис. П.4.18.
K,град
K,град
1/s
dK/dt
dK/dt
1
0
Рис. П.4.18. Структурная схема блока ввода данных
0
φ
K
0
V
R
Рис. П.4.19. Отключение влияния вращения Земли
67
Блок пропорциональной коррекции
0
0
β
c
H
0
0
β
к
Рис. П.4.20. Добавление циркуляции в блок коррекции
68
Учет влияния линейного ускорения
Рассчитать ускорение по оси η ( η ) по формуле и записать его в
соответствующую ячейку в блоке данных (рис. П.4.21).
Ускорение по оси
η
Рис. П.4.21. Добавление ускорение по оси η (
)
Заполнить блок «Step» следующим образом: в строку «Step time»
записать время действие линейного ускорения, в строку «Final value»
записать
значение
*-1 (рис. П.4.22).
Рис. П.4.22. Добавление линейного ускорения
69
Блок пропорциональной коррекции
0
0
β
c
H
0
0
β
к
Блок постоянной коррекции
Рис. П.4.23. Ввод сигнала линейного ускорения к блоку выработки моментов коррекции
70
Содержание
1. Цели и задачи междисциплинарного проекта …………………......
2. Место междисциплинарного проекта в структуре основной
образовательной программы ………………………………………..
3. Компетенции, вырабатываемые в процессе выполнения
междисциплинарного проекта ……………………………………...
4. Техническое задание на междисциплинарный проект ……………
5. Вывод уравнений гироскопической вертикали ……………………
5.1. Общая характеристика ………………………………………….
5.2. Уравнения движения ГВ ………………………………………..
5.3. Упрощения уравнений при анализе поведения ГВ
на подвижном основании …………………………………….....
5.4. Поведение ГВ при отсутствии ускорений объект …………….
5.5. Поведение ГВ при равноускоренном движении объекта
постоянным курсом ……………………………………………..
5.6. Поведение ГВ при правильном вираже (циркуляции)
объекта …………………………………………………………...
5.7. Поведение ГВ в условиях правильного виража при
выключенной поперечной коррекции ………………………...
5.8. Влияние качки на ГВ …………………………………………...
6. Анализ основных инструментальных погрешностей
гировертикали ………………………………………………………..
6.1. Выбор основных параметров гиродвигателя ………………....
6.2. Погрешность от момента сил сухого трения ………………….
6.3 Влияние смещения центра тяжести гировертикали
относительно точки пересечения осей карданова подвеса ……….
6.4. Ошибки гировертикали от неточности установки
маятниковых акселерометров ………………………………………
7. Рекомендации по моделированию поведения ГВ в среде
matlab/simulink………………………………………………………..
Список литературы ……………………………………………………...
Приложения ……………………………………………………………...
1. Индивидуальное задание ……………………………………………
2. Основные характеристики конструкционных материалов ……….
3. Характеристики датчиков моментов ……………………………….
4. Математическая модель гировертикали …………………………...
3
3
4
4
6
6
7
12
13
14
18
27
32
33
33
38
42
44
45
47
48
48
50
52
54
Боронахин Александр Михайлович
Давыдов Владимир Борисович
Подгорная Людмила Николаевна
Ткаченко Анна Николаевна
Разработка и испытания интегрированных навигационных систем
Учебно-методическое пособие
Редактор М. Б. Шишкова
Подписано в печать
Формат 60х84 1/16.
Бумага офсетная. Печать цифровая. Печ. л. 4,5
Гарнитура «Times New Roman». Тираж 46 экз. Заказ
Издательство СПбГЭТУ «ЛЭТИ»
197376, С.-Петербург, ул. Проф. Попова,5