Лабораторная работа № 1. ИЗУЧЕНИЕ ПРЕЦЕССИИ ГИРОСКОПА
реклама

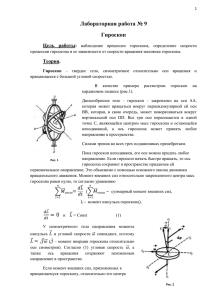
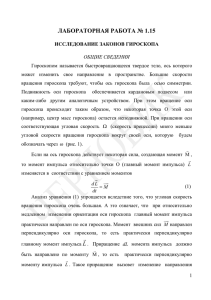
Лабораторная работа № 1. ИЗУЧЕНИЕ ПРЕЦЕССИИ ГИРОСКОПА. Принадлежности: гироскоп, электронный блок, в состав которого входят система измерения скорости вращения гироскопа, электронный таймер, фотоэлектрическая система отсчета угла поворота гироскопа вокруг вертикальной оси. Теория. Гироскопом называется быстровращающееся твердое тело, ось которого может изменять свое направление в пространстве. Большие скорости вращения гироскопа требуют, чтобы ось гироскопа была осью симметрии. Подвижность оси гироскопа обеспечивается кардановым подвесом или каким-либо другим аналогичным устройством. При этом вращение оси гироскопа происходит таким образом, что некоторая точка О этой оси (например, центр масс гироскопа) остается неподвижной. При вращении оси соответствующая угловая скорость Ω (скорость прецессии) много меньше угловой скорости вращения гироскопа вокруг своей оси, которую будем обозначать через ω. Если на ось гироскопа действует некоторая сила, создающая момент М, то момент импульса относительно точки О (главный момент импульса) L изменяется в соответствии с уравнением моментов dL M. (1) dt Анализ уравнения (1) упрощается вследствие того, что угловая скорость вращения гироскопа очень большая. А это означает,. ч что при относительно медленном изменении ориентации оси гироскопа главный момент импульса практически направлен по оси гироскопа. Момент внешних сил М направлен перпендикулярно оси гироскопа, т. е. практически перпендикулярно главному моменту импульса L. Приращение dL момента импульса должно быть направлено по моменту М, т. е. практически перпендикулярно моменту импульса L. Такое приращение вызовет изменение направления момента импульса L, т. е. изменение направления оси гироскопа. Если при этом ось поворачивается на угол Ωdt, то соответствующее изменение момента импульса будет равно (2) dL Ldt. Если при изменении направления оси на угол Ωdt момент внешней силы повернется на такой же угол и не изменит своей величины, то ситуация в новом положении будет аналогична, т. е. произойдет такое же изменение направления оси вращения гироскопа за следующий интервал времени dt, т. е. под действием постоянного момента сил М возникнет вращение оси гироскопа с постоянной угловой скоростью Ω. При этом изменение момента импульса L в единицу времени, равное LΩ, будет определяться уравнением (1). (3) L M . Учитывая, что для быстро вращающегося гироскопа L = Jω, (4) где J — момент инерции гироскопа относительно его оси, получим для угловой скорости M (5) J Вращение оси гироскопа с угловой скоростью Ω под действием постоянного момента сил М называется прецессией гироскопа. Отметим две особенности прецессионного движения. Во-первых, прецессия не обладает «инертностью» (прецессия существует, пока действует момент). Во-вторых, ось вращения прецессии не совпадает с направлением момента силы М, а перпендикулярна ему (параллельно М приращение ΔL). Цель задачи: а) ознакомление с особенностями движения гироскопа, б) определение угловой скорости прецессии и момента инерции гироскопа. 1 Описание прибора. Прибор (рис. 1) состоит из электрического моторчика А, укрепленного в обойме В. Обойма опирается на вертикальный стержень С и может вращаться вокруг горизонтальной оси, а вместе со стержнем — вокруг вертикальной. Рис. 1 Собственно, гироскопом является ротор моторчика с массивным диском Е. Момент внешних сил, приложенных к гироскопу, может изменяться при перемещении груза К по стержню обоймы. Прибор содержит также электронный блок G, в состав которого входят: система измерения скорости вращения моторчика, электронный таймер, фотоэлектрическая система измерения угла поворота гироскопа вокруг вертикальной оси. Включение моторчика производится выведением ручки «скорость вращения» 1 из крайнего левого положения. Дальнейшее вращение этой ручки по часовой стрелке приводит к увеличению скорости вращения моторчика. Стрелочный прибор 2 на панели блока показывает скорость вращения моторчика. Включение электронного таймера и фотоэлектрической системы измерения угла φ поворота гироскопа вокруг горизонтальной оси производится нажатием клавиши «сеть» 3. При нажатии на клавишу «сброс» 4 происходит обнуление табло электронного блока 6, 7. После нажатия на клавишу «сброс» происходит запуск фотоэлектрической системы измерения угла φ и электронного таймера в момент, когда световой пучок попадает на фотоэлемент системы через одну из прорезей на цилиндрической диафрагме D, поворачивающейся вместе с гироскопом вокруг вертикальной оси. После нажатия на клавишу «стоп» 5 происходит остановка измерений времени t и угла φ при очередном попадании светового пучка на фотоэлемент системы. Угловую скорость прецессии получают путем деления зафиксированного на табло 7 электронного блока значения угла φ на соответствующее время t. Измерения. Груз К закрепляют на стержне обоймы так, чтобы весь прибор находился в безразличном равновесии, ось гироскопа устанавливают горизонтально. Включают моторчик и выжидают 2–3 минуты, пока ротор не начнет вращаться с номинальным числом оборотов. Смещением груза К создают момент силы тяжести М. Величина этого момента сил определяется по формуле M = Ph, где Р — заданный вес груза, h — расстояние этого груза от era начального положения, измеряемого по шкале на стержне. Далее измеряют величину угловой скорости прецессии при различных значениях момента М (при различных значениях плеча h). Необходимо сделать 3–4 измерения для каждого значения скорости вращения ротора (рекомендуемые значения скорости вращения 2000, 4000 и 6000 оборотов в минуту). При устойчивой работе моторчика (ω = const) в пределах ошибок измерений должно соблюдаться условие M M1 M 2 ... n L. (6) 1 2 n Пользуясь этим, определяют величину L — среднее арифметическое значение величины L для каждого значения скорости вращения ротора ω. Далее вычисляют момент инерции гироскопа J = L/ω. В пределах ошибок измерений значения J для всех ω должны совпадать. 2