Лекция 11 ЭЛЕМЕНТАРНАЯ (ПРЕЦЕССИОННАЯ) ТЕОРИЯ ГИРОСКОПА
реклама
 ТЕОРИЯ ГИРОСКОПА")
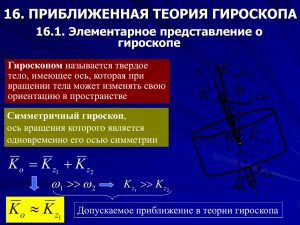
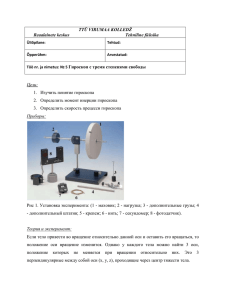
Лекция 11 ЭЛЕМЕНТАРНАЯ (ПРЕЦЕССИОННАЯ) ТЕОРИЯ ГИРОСКОПА Гироскоп Гироскоп – тело, имеющее ось материальной симметрии, с большой угловой скоростью вращающееся вокруг этой оси Лекция 11 2 Вращение Земли Лекция 11 3 R – собственное вращение P - прецессия N - нутация wP=10-7wR Лекция 11 4 Основное допущение элементарной теории ω . ω1 ω2 Теория, построенная на этом допущении называется элементарной или прецессионной теорией гироскопа Лекция 11 5 Теорема Резаля Скорость конца вектора кинетического момента по величине и направлению равна главному вектору всех внешних сил, приложенных к точкам и телам механической системы В элементарной теории гироскопов величина и направление вектора кинетического момента нам известны! K Iw1 K оси симметрии гироскопа • Если задан момент внешних сил, можно определить закон движения оси вращения гироскопа • Если известен закон движения оси гироскопа, можно определить момент сил, под действием которых происходит это движение. Лекция 11 6 Свободный (трехстепенной) гироскоп Гироскоп, закрепленный так, что его центр тяжести С совпадает с неподвижной точкой гироскопа называется уравновешенны м. Лекция 11 7 Реакция гироскопа на внешние силы Под действием силы F ось гироскопа начнет отклоняться не в сторону действия силы, а в ту сторону, куда направлен вектор момента М этой силы относительно неподвижной точки О (т. е. перпендикулярно к силе). K F u h C M e С прекращением действия силы отклонение оси гироскопа прекращается. (безынерционность движения оси гироскопа). Лекция 11 8 Возмущающие силы Fh J w1 1 Действие кратковременной силы практически не изменяет направления оси гироскопа - быстро вращающийся гироскоп обладает устойчивостью по отношению к сохранению направления его оси. Лекция 11 9 Регулярная прецессия гироскопа KO uK uK KO sin w2 I w1w2 sin mg OC w2 I w1 Лекция 11 10 Гироскопические реакции На подшипники со стороны гироскопа действуют силы, которые называются гироскопическими Главный момент этих сил относительно неподвижной точки называется гироскопическим моментом ω1 Лекция 11 ω2 11 Примеры: судовая турбина J w1w2 Q AB Ротор авиационного двигателя Лекция 11 12 Вынужденное вращение гироскопа Правило Жуковского: при сообщении гироскопу вынуждающего вращения ось гироскопа стремится кратчайшим путем повернуться так, чтобы направления векторов угловых скоростей вынуждающего и собственного вращения w совпали. Лекция 11 13 Применение гироскопов Для определения угловых отклонений объекта: гироскопы направления, гировертикали Для определения угловых скоростей и ускорений (дифференцирующие гироскопы): гиротахометры и гиротахоакселерометры Для определения интегралов от входных величин: гироскопические интеграторы угловых скоростей, гироскопические интеграторы линейных ускорений Для стабилизации гиростабилизаторы объекта или отдельных устройств: Для решения навигационных задач Лекция 11 14