Список завдань для практичних занять і самостійної роботи студентів з курсу «Методи оптимізації та дослідження операцій»
реклама

Список завдань для практичних занять і самостійної роботи
студентів з курсу «Методи оптимізації та дослідження
операцій»
Частина 2. Нелінійна оптимізація
Оглавление
Теми для самостійної роботи ................................................................................................ 2
1. Системи масового обслуговування ................................................................................. 2
2. Задачі управління запасами ........................................................................................... 22
Практичне заняття № 1 ....................................................................................................... 48
Практичне заняття № 2 ....................................................................................................... 50
Практичне заняття № 3 ....................................................................................................... 59
Практичне заняття № 4 ....................................................................................................... 66
Практичне заняття № 5 ....................................................................................................... 77
Практичне заняття № 6 ....................................................................................................... 78
Практичне заняття № 7 ....................................................................................................... 85
Практичне заняття № 8 ....................................................................................................... 85
Практичне заняття № 9 ....................................................................................................... 85
Теми для самостійної роботи
1. Системи масового обслуговування
Мета: ознайомитися з математичними моделями систем масового
обслуговування (СМО), методами розрахунку їх параметрів.
План
1. Основні поняття. Класифікація систем масового обслуговування
2. Потоки подій
3. СМО без черги
4. Одноканальні СМО
5. Багатоканальні СМО з обмеженою чергою, з необмеженою чергою
6. Імітаційне моделювання СМО
Опорні поняття
Основні поняття. Класифікація систем масового обслуговування
При дослідженні операцій часто мають справу з системами,
призначеними для багаторазового використання при розв'язанні одно
типових задач. Процеси, що при цьому виникають, називаються процесами
обслуговування, а системи − системами масового обслуговування (СМО).
Приклади: перукарні, СТО, квиткові каси, магазини, обчислювальні
комплекси, ремонтні майстерні і т.п.
Кожна СМО містить певну кількість сервісних одиниць ( пристроїв,
пунктів, станцій), які будемо називати каналами обслуговування. Це − лінії
зв’язку, робочі точки, обчислювальні машини, продівці і др. За числом
каналів СМО розділяють на одно канальні та багатоканальні.
Заявки поступають в СМО зазвичай нерегулярно, утворюючи так
званий випадковий потік заявок (вимог). Випадковий характер потоку
заявок і часу їх обслуговування є причиною того, що СМО виявляється
завантаженоє нерівномірно.
Предметом теорії масового обслуговування є побудова математичних
моделей, що повязують задані умови роботи СМО (число каналів, їх
продуктивність, характер потоку заявок) з показниками ефективності СМО,
які описують її спроможність обслуговувати потік заявок.
СМО ділять на два основних класи: СМО з відмовами та СМО з
очікуванням (чергою). СМО з очікуванням розділяють на різні типи залежно
від організації черги: з обмеженою або необмеженої чергою, з обмеженим
часом очікування і т.п.
Для класифікації СМО важливу роль відіграє дисципліна
обслуговування, що визначає порядок вибора заявок з числа поданих і
порядок розподілу їх між вільними каналами. За цією ознакою
обслуговування заявки може бути організовано за принципом «перша
2
прийшла – перша обслужена», «остання прийшла – перша обслужена» або
обслуговування з пріоритетом.
Поняття марковського випадкового процесу
Процес роботи СМО − випадковий процес, тобто процес зміни з часом
стану будь-якої системи відповідно з ймовірнісними закономірностями.
Процес називається процесом з дискретними станами, якщо його
можливі стани S1, S2 ,... можна заздалегідь перерахувати, а перехід системи з
стану в стан відбувається миттєво. Процес називається процесом з
неперервним часом, якщо моменти можливих переходів системи із стану в
стан не фіксовані, а випадкові.
Процес роботи СМО є випадковим процесом з дискретними станами і
неперервним часом.
Математичний аналіз роботи СМО суттєво спрощується, якщо процес
цієї роботи − марковський, або випадковий процес без післядії, коли для
будь-якого моменту часу t0 ймовірнісні характеристики процесу в
майбутньому залежать лише від його стану в даний момент t0 і не залежить
від того, коли і як система прийшла у цей стан.
При аналізі випадкових процесів з дискретними станами зручно
користуватися геометричною схемою − так званим графом станів. Стани
зображуються прямокутниками (колами), а можливі переходи із стану в стан
− стрілками − орієнтованими дугами), що з’єднують стани.
Потоки подій
Під потоком подій розуміється послідовність однорідних подій,
наступних одне за іншим в якісь випадкові моменти часу (наприклад, потік
викликів на телефонної станції, потік відмов комп'ютера, потік покупців і
т.п.).
Потік характеризується інтенсивністю А – частотою появи подій, що
надходять в СМО в одиницю часу.
Потік подій називається регулярним, якщо події слідують одне за
іншим через певні рівні проміжки часу. Наприклад, потік виробів на
конвеєрі складального цеху (з постійною швидкістю руху) є регулярним.
Потік подій називається стаціонарним, якщо його імовірнісні
характеристики не залежать від часу. В Зокрема, інтенсивність
стаціонарного потоку є величина постійна: X (t) = X. Наприклад, потік
автомобілів на міському проспекті не є стаціонарним протягом доби, але цей
потік можна вважати стаціонарним в певний час доби, скажімо, в години
пік. В цьому випадку фактичне число проходять автомобілів в одиницю часу
(наприклад, кожну хвилину) може помітно відрізнятися, але середнє їх
число постійно і не буде залежати від часу.
Потік подій називається потоком без наслідки, якщо для будь-яких
двох непересічних ділянок часу 1 , і 2 число подій, що потрапляють на
один з них, не залежить від числа подій, що потрапляють на інші.
Наприклад, потік пасажирів, що входять в метро практично не має наслідки.
А, скажімо, потік покупців, що відходять з покупками від прилавка, вже має
3
наслідок (хоча б тому, що інтервал часу між окремими покупцями не може
бути менше, ніж мінімальна час обслуговування кожного з них).
Потік подій називається ординарним, якщо ймовірність потрапляння
на малий (елементарний) ділянку часу t двох і більше подій дуже мала в
порівняно з ймовірністю попадання одного події. Іншими словами, потік
ординарний, якщо події з'являються в ньому поодинці, а не групами.
наприклад, потік поїздів, що підходять до станції, ординарій, а потік вагони
не ординарний.
Потік подій називається найпростішим (або стаціонарним
пуассоновским), якщо він одночасно стационарен, ординарний і не має
наслідки. Назва «найпростіший» пояснюється тим, що СМО з
найпростішими потоками має найбільш просте математичне опис.
Регулярний потік не є найпростішим, оскільки володіє наслідком:
моменти появи подій в такому потоці жорстко зафіксовані.
Твердження. При накладенні (суперпозиції) досить великого числа n
незалежних, стаціонарних і ординарних потоків (порівнянних між собою за
інтенсивностями 1, 2 ,..., n виходить потік, близький до найпростішого з
інтенсивністю , яка дорівнює сумі інтенсивностей вхідних потоків, тобто
= 1 + 2 + ... + n .
Розглянемо найпростіший потік подій як необмежену послідовність
випадкових точок на часовій осі. Число m подій, що попадають на
довільний проміжок часу , розподілено за законом Пуассона
()m −
Pm () =
e ,
(1)
m!
для якого математичне очікування випадкової величини дорівнює її
дисперсії: a = 2 = .
Зокрема, ймовірність того, що за час не відбудеться жодної події,
дорівнює
(2)
P0 () = e− .
Знайдемо розподіл інтервалу часу T між довільними двома сусідніми
подіями найпростішого потоку.
Згідно з (2) ймовірність того, що на проміжку часу довжини t не
відбудеться жодна з наступних подій, дорівнює
P(T t ) = e− ,
(3)
а ймовірність протилежної події, тобто функція розподілу випадкової
величини T , є
F (t ) = P(T t ) = 1 − e− ,
(4)
Щильність ймовірності випадкової величини є похідною її функції
розподілу, тобто
(t ) = F (t ) = e− ,
(5)
Розподіл, що задається щильністю (5) або функцією розподілу (4),
називається показниковим (або експоненціальним).
4
Отже, інтервал часу між двома будь-якими сусідніми подіями має
показників розподіл, для якого:
1
a = 2 = .
(6)
Для найпростішого потоку з інтенсивністю ймовірність попадання на
елементарний (малий) проміжок часу t хоча б однієї події згідно (4)
дорівнює
(7)
Pt = P(T t ) = 1 − e− t .
Рівняння Колмогорова. Граничні ймовірності подій
Розглянемо математичний опис марковського процесу з дискретними
станами і неперервним часом на наступному прикладі.
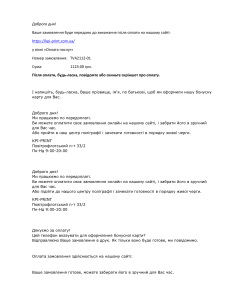
Нехай пристрій складається з двох вузлів, кожен з яких може в будьякий момент часу вийти з ладу, після чого миттєво починається ремонт
вузла, тривалість якого невідома заздалегідь.Можливі стани системи: S0 −
обидва вузли справні; S1 − перший вузол ремонтується, другий справний;
S 2 − другий вузол ремонтується, перший справний; S3 − обидва вузли
ремонтуються. Граф системи наведений на рис. 1.
Рис. 1 Граф станів СМО
Тут ij , i, j = 0,1,2,3 − інтенсивності переходів системи із стану Si в
стан S j .
Ймовірністю i -го стану називається ймовірність pi (t ) того, що в
момент часу t система буде знаходитися в i -му стані. Вочевидь, для будьякого моменту часу t
3
p (t ) = 1 .
i =0
(8)
i
Система диференціальних рівнянь Колмогорова для ймовірностей
станів записується в такий спосіб:
p0 = 10 p2 + 20 p2 − ( 01 + 02 ) p0 ,
p = p + p − ( + ) p ,
1
01 0
31 3
10
13
1
(9)
p
=
p
+
p
−
(
+
)
p
,
02 0
32 3
20
23
2
2
p3 = 13 p1 + 23 p2 − ( 31 + 32 ) p3 ,
5
Правило побудови рівнянь Колмогорова: ліворуч в кожному рівнянні
записується похідна ймовірності i -го стану; праворуч − сума добутків
ймовірностей всіх станів ( з яких стрілки йдуть в даний стан) на
інтенсивності відповідних потоків подій, мінус сумарна інтенсивність всіх
потоків, які виходять з даного стану, помножена на ймовірність даного
стану.
Оскільки в системі (9) незалежних рівнянь на одиницю менше за
загальне число рівнянь, систему (9) слід доповнити рівнянням (8).
Для того, щоб знайти один єдиний розв'язок системи (8), (9), потрібно
задати так звані початкові умови − ймовірності станів в початковий момент
часу. Наприклад, якщо вважати, що в момень часу t = 0 обидва вузли
системи, що розглядається, були справними, то
p0 (0) = 1, p1 (0) = p2 (0) = p3 (0) = 0 .
Рівняння Колмогорова дають можливість знайти всі ймовірності станів
як функції часу. Особливий інтерес представляють ймовірності системи
pi (t ) в граничному стаціонарному режимі, тобто при t → . Такі
ймовірності називаються граничними (або фінальними) ймовірностями
станів.
В теорії випадкових процесів доведено, що у випадку, коли кількість
станів системи обмежена і з кожного з них можна (за скінченне число
кроків) перейти в будь-який інший стан, то граничні ймовірності відсутні.
Гранична ймовірність стану Si має чіткий зміст: вона показує середній
відносний час перебуття системи в цьому стані.
Оскільки граничні ймовірності незмінні, то зліва в рівняннях (9) слід
замінити похідні їх нульовими значеннями і отримаємо систему лінійних
алгебраїчних рівнянь, що описує стаціонарний режим:
( 01 + 02 ) p0 = 10 p2 + 20 p2 ,
( + ) p = p + p ,
10
13
1
01 0
31 3
(10)
(
+
)
p
=
p
+
p
,
23
2
02 0
32 3
20
( 31 + 32 ) p3 = 13 p1 + 23 p2 .
Систему (10) можна отримати безпосередньо за графом станів, якщо
діяти за наступним правилом: ліворуч в рівняннях стоїть гранична
ймовірність даного стану, помножена на сумарну інтенсивність всіх
потоків, що виходять з даного стану, а праворуч − сума добутків
інтенсивностей всіх потоків, які входять в даний стан, на ймовірності тих
станів, з яких ці потоки виходять.
Багатоканальні СМО та характеристики їх ефективності
Розглянемо процес надання деякої послуги деякою дільницею. Будемо
вважати, що потік заявок на обслуговування є стаціонарним, тобто його
ймовірнісні характеристики не залежать від часу і − інтенсивність
вхідного потоку заявок. Звісно, це не означає, що фактичне число заявок в
одиницю часу є незмінним, потік не є регулярним і має згущення і
розрідження. Але ці згущення і розрідження не мають закономірного
6
характеру, а середнє число подій, що мають місце в одиницю часу, є
константним. Потік заявок на послугу не має післядії, оскільки події, що
утворюють потік, з’являються незалежно одна від одної, і кожна подія має
свої причини. Потік заявок є також ординарним, тому що ймовірність
попадання на малий проміжок часу двох і більше подій є дуже малою у
порівнянні з ймовірністю попадання однієї події. Отже, потік заявок на
послугу можна вважати пуассоновським. Крім того, будемо припускати, що
цей випадковий процес є марковським, тобто таким, для якого
передісторією можна знехтувати. Потік обслуговування – потік заявок, що
обслуговуються одним неперервно зайнятим каналом – також будемо
вважати найпростішим, причому середній час обслуговування tоб обернене
до величини інтенсивності обслуговування : tоб = 1 .
Залежно від того, як математично буде описана система масового
обслуговування,
будуть
сформульовані
критерії
оптимальності
ефективності її роботи.
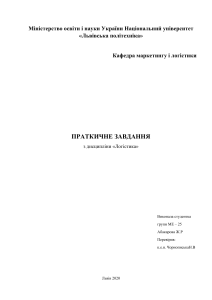
Спочатку розглянемо дільниці з надання послуги як багатоканальну
систему з відмовами (класичну задачу Ерланга), яка містить n постів
обслуговування, і знайдемо граничні ймовірності станів системи, а також
показники її ефективності, серед яких:
– A – абсолютна пропускна спроможність СМО;
– Q – відносна пропускна спроможність, тобто середня доля
заявок, що надійшли і обслуговуються системою;
– Pвідм – ймовірність відмови, тобто того, що заявка надійде, але
покине систему без надання їй сервісу;
– k – середнє число зайнятих каналів.
Граф станів такої системи наведений на рис. 2.
Рис. 2 Граф станів системи
n
постів обслуговування з відмовами
Середнє число заявок, що надходить за середній час обслуговування
однієї заявки, виражає коефіцієнт завантаженості = . В теорії
масового обслуговування величину також називають зведеною
інтенсивністю потоку заявок, або інтенсивністю навантаження одного
каналу.
Граничні ймовірності станів відкритої СМО без черги обчислюються за
формулами Ерланга:
−1
N k
k
p0 =
p0 , k = 1, n.
, pk =
k
!
k
!
k =0
(11)
Ймовірністю відмови системи є гранична ймовірність того, що всі
канали системи будуть зайняті:
7
Pвідм
n
=
p0 .
n!
(12)
Відносна та абсолютна пропускна спроможність СМО розраховуються
відповідно за формулами:
Q = 1 − Pвідм
n
n
p0 .
= 1−
p0 ; A = q = 1 −
n!
n
!
(13)
Середнє число зайнятих каналів дорівнює:
n
k = kpk ,
k =0
де pk – граничні ймовірності станів, що розраховуються за формулами (11).
Оскільки кожен зайнятий пост обслуговує в середньому заявок в одиницю
часу, то:
n
A
k = = 1 −
p0 .
n
!
(14)
Оцінювання ефективності роботи дільниці з надання послуги (за
відсутністю черги) можна здійснювати за різними критеріями
оптимальності. В межах даної роботи поставимо такі дві задачі оптимізації:
1) знайти мінімальне число постів дільниці, які б забезпечували послугою в
середньому не менш ніж 90% від заявок, що надходять до дільниці; 2)
знайти оптимальну кількість постів дільниці, при якій доходи від виконання
заявок якомога більше перекривали б втрати від простою постів. Якщо
прийняти умову, що у вартісному вираженні дохід від експлуатації одного
поста і витрати на його утримання при вимушеному простої майже ті самі,
то чистий дохід W дільниці визначиться за наступною формулою:
W = Q − M (n),
(15)
де M (n) – число постів, що вимушено простоюють, яке розраховується за
наступною формулою:
n −1
M (n) = pk (n − k ).
k =0
(16)
Далі припустимо, що дільниця з надання послуги математично може
бути представлена як система масового обслуговування з очікуванням, і
поряд з введеними показниками ефективності її роботи будемо розглядати
наступні характеристики:
– Lсист – середнє число заявок в системі;
– Tсист – середній час перебування клієнта на дільниці;
8
– Lчерги – середнє число клієнтів в черзі на обслуговування (довжина
черги);
– Pчерги – ймовірність того, що клієнт з’явиться в черзі;
– Т черги – середній час перебування клієнта в черзі;
– Pзайн – ймовірність того, що пост з надання послуги зайнятий (степінь
завантаження посту).
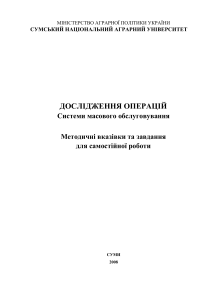
Якщо вважати, що довжина черги необмежена, а постів в системі
обслуговування n , інтенсивності потоків заявок та обслуговування
відповідно та (граф станів такої системи показаний на рис. 3), то
граничні ймовірності станів n -канальної системи з необмеженою чергою і
вказані показники розраховуються відповідно за формулами, наведеними в
табл. 1.
Рис. 3. Граф багатоканальної СМО з необмеженою чергою
В задачі раціональної організації СМО у припущенні, що клієнти
можуть очікувати на своє обслуговування досить довго і не залишають
чергу, в якості критерія оптимальності будемо розглядати мінімальну
кількість постів з надання послуги, при якій черга не буде зростати
нескінченно.
І наприкінці, припустимо, що кількість клієнтів у черзі не може
перевищувати заданого числа m , і у випадку, коли всі сервісні пости і місця
у черзі зайняті, клієнт залишає дільницю без свого обслуговування, тобто
отримує відмову. Формули, за якими обчислюються параметри системи і
показники її ефективності, наведені в останньому стовпчику табл. 1.
Для такої системи обслуговування поставимо задачу пошуку
оптимальної кількості місць у черзі на надання послуги, що при фіксованій
кількості постів обслуговування забезпечує мінімальні сумарні втрати як від
простою незадіяних постів, так і втрат, що виникають за рахунок відмов
щодо надання сервісу. Цільова функція задачі може бути записана у такий
спосіб:
W (m) = c1Pвідм + c2 n − k ,
(
)
де c1 , c2 – втрати, які несе дільниця за рахунок незадіяного посту з
технічного обслуговування чи вільного місця в черзі та відмови одному
клієнту відповідно.
9
Таблиця 1
Показники ефективності систем масового обслуговування
Показник
1
Граничні
ймовірності
Сервісна дільниця з n
постами обслуговування і
необмеженою чергою
Сервісна дільниця з n постами
обслуговування і кількістю m місць
у черзі
2
3
−1
N k
n+1
p0 =
+
,
k =0 k ! n !(n − )
pk =
k
k!
pn + r =
Ймовірність
того, що клієнт
з’явиться у
черзі
Ймовірність
відмови
p0 , k = 1, n;
n+r
n !n r
Pчерги =
Середнє число
клієнтів, що
обслуговуються
Середнє число
клієнтів в
системі
Середній час
перебування
клієнтів на
дільниці
Середній час
перебування
клієнтів в черзі
n !(n − )
k
k!
pn + r =
n+r
n !n r
p0 , r = 1, 2,..., m;
Pвідм
n +1
n !(n − )
p0
n + m
= m
p0 .
n n!
n + m
A = Q = 1 − m
p0
n n!
A = Q
Q =1
Lчерги =
p0 , k = 1, n;
Pчерги =
p0
Pвідм = 0
Абсолютна
пропускна
спроможність
Відносна
пропускна
спроможність
Середнє число
клієнтів у черзі
pk =
p0 , r = 1, 2,...;
n +1
−1
N k n +1 (1 − / n)m
p0 =
+
,
k =0 k ! n n !(1 − / n)
Q = 1 − Pвідм = 1 −
n +1 p0
;
2
n n !1 −
n
n + m
p0
n m n!
n +1 p0 1 − m + 1 − m
Lчерги =
n n !1 −
n
m
n n
2
k = = .
n + m
k = 1 − m
p0
n n!
Lсист = Lчерги + ;
Lсист = Lчерги + k ;
Tсист =
Т черги =
1
Lсист ;
Tсист =
1
Lчерги
Т черги =
1
Lсист ;
1
Lчерги
Задача 1. На підприємстві з капітального ремонту електричних машин
працює дві бригади. В середньому протягом робочого дня в майстерню
надходить 6 поламаних виробів. Електричні машини на різних об'єктах
10
відмовляють незалежно один від одного, в різний час, тобто потік заявок
можна вважати випадковим, найпростішим і пуассоновским.
Тривалість ремонту залежить від характеру ушкоджень, кваліфікації
ремонтного персоналу і інших чинників. Нехай протягом робочого дня (8
год) одна бригада виконує в середньому ремонт 4 машин. Невідремонтовані
вироби замовнику не повертаються, а знаходяться в черзі. Визначити
ймовірності станів і показників ефективності СМО.
Розв'язання. Вже згадана система може бути віднесена до СМО з
очікуванням, в якій число місць в черзі не обмежена, тобто m → .
1. Згідно умови задачі маємо такі вихідні дані:
n = 2, = 6, = 4, = / = 1.5, / n = 0.75 .
2. Оскільки в даній системі заявка не покидає її, поки не буде
обслужена, то ймовірність відмови Pвідм = 0 , відносна пропускна
спроможність Q = 1, а абсолютна пропускна спроможність A = Q = 6
3. Знайдемо ймовірності станів:
−1
−1
N k
1 2
n +1
3
p0 =
+
+
+
= 1 +
=
1! 2! 2!(2 − )
k =0 k ! n !(n − )
−1
1.51 1.52
1.53
= 1 +
+
+
= 0.14;
1!
2!
2!(2
−
1.5)
1
p1 =
p2 =
1!
2
2!
p0 = 0.14 1.5 = 0.21;
p0 =
1.52
0.14 = 0.16.
2!
Ймовірність того, що заявка виявиться в черзі
n+1
1.5
Pчерги =
p0 =
0.14 = 0.47 .
n !(n − )
1 2 (2 − 1.5)
Ймовірність відсутності черги в майстерні
p = p0 + p1 + p2 = 0.14 + 0.21 + 0.16 = 0.51 .
1. Визначимо показники ефективності СМО: середня кількість заявок у
черзі
Lчерги =
n +1 p0
=
2
n n !1 −
n
1.53 0.14
1.5
2 2 1 −
2
2
= 1.88;
середнє число зайнятих каналів (так як кожен канал обслуговує певну
кількість заявок в одиницю часу), а вся система обслуговує в середньому А
заявок, то середнє число зайнятих каналів
Lсист = Lчерги + = 1.88 + 1.5 = 3.38;
середній час очікування заявки в черзі
1
1.88
Т черги = Lчерги =
= 0.47 робочої зміни (приблизно 3,8 ч).
4
11
Приклад 2. Розглянемо в якості системи масового обслуговування
дільницю з ремонту електромобілів. Будемо вважати, що у середньому час
обслуговування одного електромобіля становить 10.7 годин, а інтенсивність
обслуговування = 1/10.7 (1./год.).
Результати опитувань наявних станцій технічного обслуговування
свідчать про те, що в середньому за зміну (10 годин) до СТО звертаються 68 власників електромобілів. Тому, будемо припускати, що інтенсивність
потоку заявок на діагностику та ремонт тягової батареї ЕМ складає
= 1/(10/ 7) = 0.7 (1/год.), а зведена інтенсивність (навантаження одного
посту технічного обслуговування) = 0.7 /(1/10.7) 7.5 .
1. Розрахуємо мінімальну кількість постів, які необхідно організувати
на дільниці ремонту електромобілів, яка забезпечила б задоволення в
середньому 90% клієнтів. Будемо поступово збільшувати число постів
ремонту ЕМ і обчислимо всі показники ефективності роботи такої системи
обслуговування (формули (1) – (6)). Водночас знайдемо і оптимальну
кількість постів, за якої досягає максимуму чистий дохід СТО, що
розраховується за формулою (5).
Результати розрахунків наведені в табл. 2.
Таблиця 2
Показники ефективності роботи СМО без черги при = 7.5
Середня
Кількість
Відносна
Абсолютна
кількість
постів
пропускна Ймовірність
пропускна
ЕМ, що
ремонт
спроможніст відмови
спроможність
ремонту
у
ь
ються
n
A
Q
P_no
K_aver
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
0.0824
0.163
0.24
0.314
0.383
0.447
0.505
0.555
0.597
0.631
0.656
0.673
0.685
0.692
0.696
0.698
0.699
0.118
0.232
0.343
0.448
0.548
0.639
0.721
0.793
0.853
0.901
0.937
0.962
0.979
0.989
0.994
0.997
0.999
0.882
0.768
0.657
0.552
0.452
0.361
0.279
0.207
0.147
0.0991
0.0632
0.038
0.0214
0.0113
0.00562
0.00262
0.00116
0.882
1.74
2.57
3.36
4.1
4.79
5.4
5.94
6.39
6.75
7.02
7.21
7.33
7.41
7.45
7.47
7.48
Середня
Значення
кількіст
критерію
ь
ефектив
незадіян
ності
их
(дохід)
постів
Free_Ca
W
nal
0.118
0.764
0.26
1.48
0.432
2.14
0.642
2.72
0.899
3.2
1.21
3.57
1.6
3.81
2.06
3.88
2.61
3.78
3.25
3.5
3.98
3.03
4.79
2.41
5.67
1.66
6.59
0.81
7.55
-0.104
8.53
-1.06
9.52
-2.04
Дохід на
одиницю
посту
ремонту
W/N
0.764
0.74
0.712
0.679
0.64
0.595
0.544
0.485
0.42
0.35
0.276
0.201
0.128
0.0579
-0.007
-0.0662
-0.12
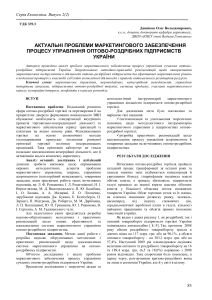
Аналіз даних в табл. 2 показує, що чим більше постів на дільниці
ремонту, тим більша кількість заявок приймається до виконання ремонтних
робіт. Однак із значним зростанням кількості постів збільшується кількість
12
таких, які вимушено простоюють, і отже, зростають непродуктивні витрати
на їх утримання. Графік функції W (n) наведений на рис. 4. Оптимальна
кількість постів з ремонту батареї ЕМ – 8.
Для того, щоб в середньому 90% клієнтів, які звертаються за послугою
з інтенсивністю = 0.7 в одиницю часу, не отримали відмову, потрібно,
щоб дільниця містила n = 10 постів для діагностування і ремонту.
Можна також визначити прийнятний інтервал зміни кількості постів
ремонту батареї ЕМ на дільниці шляхом пошуку розумних границь для
таких конкуруючих економічних показників, що характеризують процес
обслуговування, як ймовірність відмови і частка постів, що простоюють.
Останню можна знайти за формулою:
X (n) = (n − k ) / n .
Поставимо задачу визначити таку кількість постів обслуговування на
дільниці, за якої ймовірність відмови клієнту не перевищує величини , а
частка постів, яка простоює, не більша за величину . Рівні
обслуговування та
задаються з практичних міркувань. На рис. 5
y = P _ no(n) та y = X (n) і
встановлені рівні переважного обслуговування = 0.15 і = 0.33 .
Очевидно, інтервал зміни кількості постів n має границі від 8.5 до 10, отже,
достатньо організувати n = 9 постів для того, щоб досягти компромісного
побудовані графіки двох функцій
рішення в поставленій задачі.
Рис. 4. Залежність доходу дільниці
(W) від кількості наявних постів
обслуговування (n)
Рис. 4. Визначення прийнятного
інтервалу зміни рівня обслуговування
2. Обчислимо тепер показники ефективності роботи дільниці ремонту
батареї ЕМ за умови представлення її як СМО з необмеженою чергою.
Параметри потоків заявок на обслуговування і інтенсивність
обслуговування такі самі. Аналізуючи відповідні формули, наведені в табл.
1, можна зробити висновок, що черга не буде зростати нескінченно за умови
/ n 1, тобто n = 7.5 . Отже, мінімальна кількість постів технічного
13
обслуговування на ділянці nmin = 8 . В табл. 2 наведені результати
обчислень характеристик СМО за умови, що кількість постів технічного
обслуговування дільниці nserv = 4 , а кількість місць на стоянці біля
дільниці m поступово змінюється від 4 до 15. Зазвичай місце для стоянки
розглядають як сервіс, оскільки тут ЕМ можуть очікувати звільнення постів
обслуговування. Тоді, загальна кількість каналів обслуговування в системі
N = nserv + m . Остання колонка табл. 3 містить значення критерію
ефективності роботи системи, який враховує втрати на утримання постів
ремонту та перебуванням у черзі клієнтів, і задається формулою [1]:
1
С _ relativ = (nmin + m) + 3Tчерги .
Отже, результати розрахунків свідчать про те, що ймовірність простою
постів майже нульова навіть при m = 4 . При m = 7 суттєво зменшується
ймовірність виникнення черги P_que. До того ж, і значення критерію
оптимальності при такому m є найменшим. Графік функції
y = С _ relativ(m) представлений на рис. 5. При збільшенні місць очікування
на стоянці від 4 до 7 ймовірність потрапити до черги у клієнта зменшується
від 0.752 до 0.37. А при наявності 8 місць на стоянці дільниці до черги
потрапляє близько 10% клієнтів. При цьому середній час знаходження
електромобілів в черзі дорівнює лише 0.225 (13-14 хвилин).
Таблиця 3
Показники ефективності роботи СМО з необмеженою чергою при = 7.5
Кількість
Втрати на
Середня
Ймовірність Ймовірність Середня
місць на Загальна
Середній час утримання
того, що
для ЕМ
кількість
стоянці кількість кількість ЕМ,
очікування
постів та
каналів
що
дільниця потрапити
ЕМ в
в черзі
перебування
сервісу ремонтуються простоює
до черги
черзі
m
4
5
6
7
8
9
10
11
12
13
14
15
N
8
9
10
11
12
13
14
15
16
17
18
19
K_aver
7.49
7.49
7.49
7.49
7.49
7.49
7.49
7.49
7.49
7.49
7.49
7.49
p0
0.000209
0.000416
0.0005
0.000534
0.000549
0.000555
0.000557
0.000558
0.000558
0.000559
0.000559
0.000559
P_que
0.752
0.421
0.228
0.119
0.0593
0.0283
0.0129
0.00558
0.0023
0.000909
0.000342
0.000123
14
L_que
11.8
2.51
0.909
0.373
0.158
0.0667
0.0277
0.0111
0.00433
0.00162
0.000586
0.000203
T_que
16.9
3.59
1.3
0.532
0.225
0.0953
0.0395
0.0159
0.00619
0.00232
0.000837
0.000291
в черзі
C_relativ
62
23.6
18.2
17.3
17.8
18.9
20.1
21.5
22.9
24.3
25.7
27.1
Рис. 6. Графік залежності втрат на утримання постів
і перебування ЕМ в черзі від кількості місць на стоянці ( n = 4 )
Результати розрахунків показників ефективності роботи дільниці за
умови розглядання її як багатоканальної ( n = 4 ) системи обслуговування з
очікуванням при різній довжині черги наведені в табл. 4. За цими даними
можна зробити такі висновки. У випадку, коли інтенсивність потоку заявок
на ремонт батареї ЕМ майже вдвічі перевищує кількість постів
обслуговування да дільниці, а сама послуга триває близько 10 годин,
ймовірність простою дільниці майже нульова, а ймовірність потрапити до
черги у клієнта становить майже 0.5, тобто кожен другий клієнт буде
очікувати на своє обслуговування. Час очікування в черзі залежить від
кількості m місць в черзі і зростає із зростанням m. Оскільки ємність системи
обмежена кількістю N=m+n, то й ефективна інтенсивність заявок на ремонт
батареї ЕМ виявилася нижчою за задану і зростає зі зростанням m від 0.314
до 0.374. Вибрати оптимальну кількість місць в черзі можна з міркувань
розумного (допустимого) часу очікування у черзі. Наприклад, якщо
обмежити такий час величиною в 5-6 годин, то достатньо обмежити
довжину черги в 5 місць.
Таблиця 4
Показники ефективності роботи СМО з обмеженою чергою при = 7.5
Загальна
Кількість кількість
місць на каналів
стоянці сервісу
m
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
N
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
Середня
кількість
ЕМ, що
ремонту
ються
Ймовірність Ймовірність
того, що
для ЕМ
дільниця
потрапити
простоює
до черги
K_aver
p0
3.36
0.00421
3.68
0.00207
3.84
0.00106
3.92
0.000554
3.96
0.000293
3.98
0.000155
3.99
8.27e-05
3.99
4.41e-05
4
2.35e-05
4
1.26e-05
4
6.71e-06
4
3.58e-06
4
1.91e-06
4
1.02e-06
4
5.45e-07
4
2.91e-07
P_no
0.552
0.508
0.488
0.477
0.472
0.469
0.468
0.467
0.466
0.466
0.466
0.466
0.466
0.466
0.466
0.466
Середній
час
Середня Середній час Середнє перебування
кількість очікування число ЕМ в
ЕМ в
ЕМ в черзі
в черзі
системі
системі
Ефективна
інтенсивність
потоку ЕМ
L_que
0
0.508
1.24
2.08
2.98
3.93
4.9
5.88
6.87
7.86
8.86
9.86
10.9
11.9
12.9
13.9
lamda_eff
0.314
0.344
0.359
0.366
0.37
0.372
0.373
0.373
0.373
0.374
0.374
0.374
0.374
0.374
0.374
0.374
15
T_que
0
0.726
1.76
2.97
4.26
5.61
7
8.4
9.81
11.2
12.7
14.1
15.5
16.9
18.4
19.8
L_sys
3.36
4.19
5.07
5.99
6.94
7.91
8.89
9.87
10.9
11.9
12.9
13.9
14.9
15.9
16.9
17.9
T_sys
4.8
5.99
7.25
8.56
9.91
11.3
12.7
14.1
15.5
16.9
18.4
19.8
21.2
22.6
24.1
25.5
Моделювання систем масового обслуговування
Розглянемо приклад, пов'язаний з моделюванням методом Монте-Карло
системи масового обслуговування. є одноканальна СМО (n = 1) з чергою,
число місць в черзі m = 1. Потік заявок − пальмовский, тобто сусідні
інтервали часу між заявками є незалежними випадковими величинами з
однаковою щільністю ймовірності f ( ) . Час обслуговування однієї заявки −
випадкова величина з щільністю ймовірності ( ) .
Потрібно, моделюючи роботу СМО методом Монте-Карло і маючи в
своєму розпорядженні однієї довгої реалізацією подій вхідного потоку
тривалістю T , знайти оцінки:
– P0 і P1 , – ймовірностей того, що канал не буде зайнятий і канал буде
зайнятий;
– величини середнього часу очікування в черзі mˆ1 (tоч ) і дисперсії часу
очікування Dˆ (tоч ) ;
– ймовірності відмови в обслуговуванні Pвiдм .
Розв'язання. Граф станів системи показаний на рис. 10.
Черги немає
Рис. 10
Будемо вважати, що в початковий момент часу система знаходиться в стані
Q0 . Розіграємо моменти часу t1 , t2 , t3 ,... приходу заявок. Для цього визначимо
функцію розподілу ймовірностей інтервалів часу між заявками
F ( ) = f ( x)dx
0
і, використовуючи метод зворотної функції, послідовно разиг-раєм
інтервали часу 1 , 2 , 3 ,... , приклад реалізації яких показаний на рис. 11.
Рис. 11
На другий осі (рис. 11) будемо зображати стан каналу (жирна риса −
«зайнято», тонка − «вільно»). На третій осі будемо зображати стан місця в
16
черзі. Заявка, що прийшла в момент часу t1 , займає канал. Час її
обслуговування 1 розігрується за допомогою методу зворотних функцій.
Друга заявка, що прийшла в момент t 2 , також займає канал після його
звільнення першою заявкою. Третя заявка займає місце в черзі, а четверта
залишає СМО. позначимо через T0 − час, протягом якого канал вільний,
T1 = i − сумарний час обслуговування (для четвертої заявки час
обслуговування 4 = 0 ). При достатньо великому значенні T оцінки
ймовірностей дорівнюють відповідно
T
Pˆ0 = 0
T
і
T
Pˆ1 = 1
T
.
Оцінка середнього часу очікування tоч в черзі
mˆ 1 (tоч ) =
1 N
i
N i =1
,
де i − час очікування в черзі i -ї заявки (перша і друга заявки одночас
прийняті до обслуговування, а четверта отримала відмову, тому для цих
заявок i = 0 ), N − загальне число заявок. Дисперсія часу очікування в черзі
2
D(tоч )
Оцінка ймовірності відмови
1 N
i − mˆ1 (tоч )
N − 1 i =1
N
Pˆвiдм =
N
.
, де N * − число заявок, що отримали
відмову.
Рекомендована література, інформаційні ресурси
1. Вентцель Е.С. Теория случайных процессов и ее инженерные приложения: учебное
пособие / Е.С. Вентцель, Л. А. Овчаров. – 5-е изд., стер. – М.: КНОРУС, 2013. – 448 с.
2 .Таранцев А.А. Инженерные методы теории массового обслуживания – Изд. 2-е,перераб.
и доп. - СПб.: Наука, 2007. – 175 с.
3. Таха Х.А. Введение в исследование. 6-е издание. Пер. С англ. / Хєдми А. Таха. – М.:
Издательский дом «Вильямс», 2001. – 912 с.
4. Гнеденко Б.В., Коваленко И.Н. Введение втеорию массового обслуживания. – М.: Издво «КомКнига», 2005.
5. Беспятых Е.А. Системы массового обслуживания. Решение типичных задач //
Молодежный научный форум: Технические и математические науки: электр. сб. ст. по мат. XLI
междунар.
студ.
науч.-практ.
конф.
№
1(41).
−
URL: https://nauchforum.ru/archive/MNF_tech/1(41).pdf
Варіанти завдань для самостійної та індивідуальної роботи
Варіант 1 − 3 Задача 1
Варіант 4 − 6 Задача 2
Варіант 7 − 10 Задача 3
Варіант 11 − 13 Задача 4
Варіант 14 − 16 Задача 5
Варіант 17 − 20 Задача 6
Варіант 21 − 23 Задача 7
Варіант 24 − 27 Задача 8
Варіант 28 − 30 Задача 9
Варіант 31 − 34 Задача 10
Варіант 35 − 37 Задача 11
Варіант 38 − 40 Задача 12
Варіант 41 − 43 Задача 13
Варіант 44 − 46 Задача 14
Варіант 47 − 49 Задача 15
Варіант 50 − 53 Задача 16
Варіант 54 − 56 Задача 17
17
Задача 1. Одноканальна СМО з відмовами є ще однією телефонну лінію.
Заявка (виклик), яка прийшла в момент, коли лінія зайнята, отримує відмову. Всі
потоки подій найпростіші. Інтенсивність потоку λ = 0,95 виклику в хвилину.
Середня тривалість розмови t = 1 хв. Визначте ймовірні характеристики СМО в
сталому режимі роботи. Скільки телефонів має працювати паралельно, щоб
ймовірність відмови була менше 1/10?
Задача 2. В обчислювальному центрі працює 5 персональних комп'ютерів
(ПК). Найпростіший потік завдань, що надходять на ВЦ, має інтенсивність λ = 10
завдань на годину. Середній час вирішення задачі дорівнює 12 хв. Заявка отримує
відмову, якщо все ПК зайняті. Знайдіть імовірнісні характеристики системи
обслуговування (ВЦ).
Задача 3. На пункт техогляду надходить найпростіший потік заявок
(автомобілів) інтенсивності λ = 4 машини в годину. Час огляду розподілено по
показовому закону і так само в середньому 17 хв. В черзі може перебувати не
більше 5 автомобілів. Визначте ймовірні характеристики пункту техогляду в
сталому режимі.
Задача 4. На промисловому підприємстві вирішується питання про те,
скільки буде потрібно механіків для роботи в ремонтному цеху. Нехай
підприємство має 10 машин, що вимагають ремонту з урахуванням числа
ремонтуються. Відмови машин відбуваються з частотою λ = 10 ВТК / год. Для
усунення несправності механіку потрібно в середньому t = 3 хв. Розподіл
моментів виникнення відмов є пуассоновским, а тривалість виконання ремонтних
робіт розподілена експоненціально. Можливо організувати 4 або 6 робочих місць
в цеху для механіків підприємства. Необхідно вибрати найбільш ефективний
варіант забезпечення ремонтного цеху робочими місцями для механіків.
Задача 5. Інтенсивність потоку телефонних дзвінків в агентство на
замовлення залізничних квитків, яка має один телефон, становить 16 викликів на
годину. Тривалість оформлення замовлення на квиток дорівнює 2.4 хвилини.
Визначити відносну і абсолютну пропускну здатність цієї СМО і ймовірність
відмови (зайнятості телефону). Скільки телефонів має бути в агентстві, щоб
відносна пропускна здатність була не менше 0,75.
Задача 6. Система масового обслуговування − квиткова каса з одним
віконцем і необмеженою чергою. Каса продає квитки в пункти А і В. Пасажирів,
які бажають купити квиток в пункт А, приходить в середньому троє за 20 хв, в
пункт В - двоє за 20 хв. Потік пасажирів найпростіший. Касир в середньому
обслуговує трьох пасажирів за 10 хв. Час обслуговування − показниковий.
Обчислити фінальні ймовірності Р 0, P2, P3, середнє число заявок в системі і в
черзі, середній час перебування заявки в системі, середній час перебування заявки
в черзі.
Задача 7. Міжміський переговорний пункт має чотири телефонні апарати. В
середньому за добу надходить 320 заявок на переговори. Середня тривалість
переговорів становить 5 хв. Довжина черги не повинна перевищувати 6 абонентів.
Потоки заявок і обслуговувань найпростіші. Визначити характеристики
обслуговування переговорного пункту в стаціонарному режимі (ймовірність
простою каналів, ймовірність відмови, імовірність обслуговування, середнє число
зайнятих каналів, середнє число заявок в черзі, середнє число заявок в системі,
абсолютну пропускну здатність, відносну пропускну здатність, середній час
18
заявки в черзі, середній час заявки в системі, середній час заявки під
обслуговуванням).
Задача 8. На диспетчерський пульт надходить потік заявок, який є потоком
Ерланга другого порядку. Інтенсивність потоку заявок дорівнює 6 заявок на
годину. Якщо диспетчер в випадковий момент залишає пульт, то при першій же
черговий заявці він зобов'язаний повернутися до пульта. Знайти щільність
розподілу часу очікування чергової заявки і побудувати її графік. Обчислити
ймовірність того, що диспетчер зможе бути відсутнім від 10 до 20 хвилин.
Задача 9. Дисплейний зал має 5 дисплеїв. Потік користувачів найпростіший.
Середнє число користувачів, які відвідують дисплейний зал за добу, так само 140.
Час обробки інформації одним користувачем на одному дисплеї розподілено по
показовому закону і становить в середньому 40 хвилин. Визначити, чи існує
стаціонарний режим роботи залу; ймовірність того, що користувач застане всі
дисплеї зайнятими; середнє число користувачів в дисплейному залі; середнє
число користувачів в черзі; середній час очікування вільного дисплея; середній
час перебування користувача в дисплейному залі.
Задача 10. У двухканальную систему масового обслуговування (СМО) з
відмовами надходить стаціонарний пуассоновский потік заявок. Час між
надходженнями двох послідовних заявок розподілено по показовому закону з
параметром λ = 5 заявок на хвилину. Тривалість обслуговування кожної заявки
дорівнює 0,5 хв. Методом Монте-Карло знайти середнє число обслужених заявок
за час 4 хв. Вказівка: провести три випробування.
Задача 11. Багатоканальна СМО з відмовами
Кількість каналів: = 7
Інтенсивність потоку заявок: = 3
Середній час обслуговування: = 1,5
Постановка завдання: є = 7 каналів (ліній зв'язку), на які надходить потік
заявок з інтенсивністю = 3. Середній час обслуговування заявки = 1.5
За характеристиками СМО потрібно визначити:
1) Фінальні ймовірності станів;
2) Імовірність того, що надійшла заявка отримає відмову;
3) Відносну пропускну здатність СМО;
4) Абсолютну пропускну здатність СМО;
5) Середнє число зайнятих каналів;
Задача 12. Одноканальна СМО з необмеженою чергою
Інтенсивність надходження заявок: 7
Інтенсивність обслуговування заявок: 8
Постановка задачі: Є одноканальна СМО з чергою, на яку не накладено
ніяких обмежень. На цю СМО надходить потік заявок з інтенсивністю = 7, потік
обслуговування має інтенсивність = 8.
За характеристиками СМО потрібно визначити:
1) Фінальні ймовірності станів;
2) Середнє число заявок в системі;
3) Середній час перебування заявки в системі;
4) Середнє число заявок в черзі;
19
5) Середній час перебування заявки в черзі;
6) Ступінь завантаження каналу.
Задача 13. багатоканальна СМО з необмеженою чергою. Оцінити
доцільність заміни однієї n-канальної СМО з необмеженою чергою, призначеної
для обслуговування потоку різнорідних заявок, на сукупність n одноканальних
СМО з необмеженою чергою, призначених для обслуговування однотипних
заявок, при заданих характеристиках потоків заявок (інтенсивності заявок різних
типів xi (i = 1; m) покладається однаковими).
Кількість каналів: 4
Кількість заявок M: 4
Інтенсивність заявок різних типів xi: 0.25
Середній час обслуговування заявки будь-якого типу (хв.): 3
Задача 14. До комп'ютера надходять завдання з інтенсивністю А = 1,5
завдань в секунду (потік завдань найпростіший). Знайти ймовірність того, що за
дві секунди: а) не зробить жодного завдання; б) надійде рівно одне завдання; в)
надійде хоча б одне завдання.
Задача 15. В ательє надходить в середньому 3 заявки в день. Вважаючи потік
найпростішим, знайти ймовірність того, що протягом двох найближчих днів
число заявок буде не менше 5.
Задача 16. Знайти граничні ймовірності для системи, граф станів якої
наведений на нижче при 12 = 1, 13 = 2, 21 = 3, 34 = 5, 45 = 2, 52 = 1, 23 = 3,
31 = 2 .
Задача 17. В умовах підвищеної ожеледно-вітрового навантаження в регіоні
відбувається масове відключення фідерів повітряних ліній електропередачі. Потік
аварійних відключень в районі електричних мереж досяг 11 штук за зміну (8 год).
Середня тривалість усунення пошкодження 2 год. Необхідно визначити: 1)
кількість ремонтних бригад, при якому черга не буде рости до безкінечності, і
характеристики СМО; 2) оптимальне число ремонтних бригад і характеристики
СМО в цьому випадку; 3) провести порівняння
Лабораторне завдання
1. Реалізувати на ЕОМ алгоритм методу Монте-Карло моделювання
СМО, що дозволяє обчислювати: відносну q і абсолютну A пропускну
спроможність СМО, середню інтенсивність потоку заявок, які залишили
СМО необслуженной, середній час очікування в черзі, середній інтервал
20
часу між подіями вихідного потоку. Вхідний потік заявок − потік Ерланга
порядку k з параметром (20). Час обслуговування має експонентну
щільність ймовірності (13) з параметром . Число місць в черзі m , число
сервісних пристроїв n і порядок потоку Ерланга k приведені в таблиці,
значения параметров и выбрать самостійно.
2. Обчислити оцінки зазначених в завданні характеристик СМО і
визначити величину їх відносної середньоквадратичної похибки.
3. Побудувати гістограму величини інтервалу часу між подіями
вихідного потоку.
4. Провести дослідження отриманих результатів на стійкість до
прийнятої моделі, змінивши вид функції щільності ймовірності інтервалів
часу між сусідніми заявками f ( ) входного потокуа. При цьому параметри
нової f ( ) підобрати так, щоб величина середнього інтервалу m1 ( )
залишилась незмінною.
5. За результатами лабораторної роботи оформити звіт, який повинен
містити: мета роботи, характеристики заданої СМО, її статистичну модель,
опис алгоритму чисельного моделювання, результати розрахунків, їх
обговорення та основні висновки.
№
1.
4.
7.
10.
13.
16.
19.
22.
25.
28.
31.
34.
37.
40.
43.
46.
49.
52.
55.
q
k
m
n
3
7
6
3
8
6
7
5
5
7
6
8
3
6
4
6
4
5
8
7
5
3
7
6
7
7
8
4
6
6
8
5
8
3
5
5
5
7
2
3
6
3
8
8
5
3
4
4
4
4
5
6
7
4
3
7
4
7
7
3
4
8
6
5
6
6
5
8
3
4
6
5
3
5
2
5
№
2.
5.
8.
11.
14.
17.
20.
23.
26.
29.
32.
35.
38.
41.
44.
47.
50.
53.
56.
q
k
m
n
3
7
6
3
8
6
7
5
5
7
6
8
3
6
4
6
4
5
8
7
5
3
7
6
7
7
8
4
6
6
8
5
8
3
5
5
5
7
2
3
6
3
8
8
5
3
4
4
4
4
5
6
7
4
3
7
4
7
7
3
4
8
6
5
6
6
5
8
3
4
6
5
3
5
2
5
№
3.
6.
9.
12.
15.
18.
21.
24.
27.
30.
33.
36.
39.
42.
45.
48.
51.
54.
57.
q
k
m
n
5
3
5
6
8
7
4
4
5
2
7
7
7
7
3
4
2
6
5
2
5
5
8
3
7
5
4
8
6
5
5
4
7
6
4
7
7
2
6
4
7
3
5
2
5
6
7
7
4
4
2
6
3
5
7
5
4
7
3
2
5
6
5
7
4
4
7
3
5
6
3
6
7
2
6
4
Поточні контрольні запитання
1.
2.
3.
4.
5.
6.
7.
Які є типи СМО?
Назвіть оснвні характеристики СМО.
Що таке інтенсивність потоку заявок? В яких одиницях вимірюється?
Який потік називається пуассоновським?
Який потік називається марковським?
Опишіть процес моделювання СМО.
Яка основна ідея методу Монте-Карло і де цей метод використовується?
21
2. Задачі управління запасами
Мета: ознайомитися з задачами і методами управління запасами (УЗ),
навчитися розраховувати оптимальні строки поповнення запасів.
План
1. Загальна постановка задачі управління запасами
2. Типи моделей управління запасами
3. Оптимізація величини запасів
4. Прості моделі управління запасами
5. Статична детермінована модель без дефіциту
6. Використання моделі Уїлсона управління запасами. Розрахунки в
Microsoft Excel
7. Системи контролю запасами
8. Додаткові методи УЗ
Опорні поняття
1. Загальна постановка задачі
Для забезпечення безперервного і ефективного функціонування
практично будь-якої організації необхідне створення запасів, наприклад, в
виробничому процесі, торгівлі, медичному обслуговуванні і т.д. В
залежності від ситуації під запасами можуть матися на увазі: готова
продукція, сировина, напівфабрикати, верстати, інструмент, транспортні
засоби, готівка та ін. Невірний розрахунок необхідних запасів може
привести як до незначного збитку (втрата частини доходу від дефіциту
товару), так і до катастрофічних наслідків (при помилковій оцінці запасів
палива на літаку).
До економічного збитку приводить і надмірна наявність запасів, і їх
недостатність. Так, якщо деяка компанія має товарні запаси, то капітал,
матеріалізований у цих товарах, заморожується. Цей капітал, який не
можна використовувати, представляє для компанії втрачену вартість у
формі невиплачених відсотків або невикористовуваних можливостей
інвестування. Крім того, запаси, особливо продукти, які швидко псуються,
вимагають створення спеціальних умов для зберігання, що спричиняє
певні витрати.
З іншого боку, чим меншим є рівень запасу, тим більша ймовірність
виникнення дефіциту, а отже й збитки внаслідок втрати клієнтів, зупинки
виробничого процесу і т.д.
Мета будь-якого підприємства − розробити таку программу роботи,
при якій загальна сума витрат на виробництво продукції і утримання
запасів мінімізується за умови повного і своєчасного задоволення попиту
на продукцію.
Докладніше задача полягає в наступному. Необхідно скласти план
випуску деякого виду виробів на період, що складається з N часових
відрізків. Передбачається, що для кожного з цих відрізків є точний прогноз
попиту на продукцію, що випускається. Для різних відрізків попит
неоднаковий. Причому, продукція, що виготовляється протягом відрізку
22
часу t, може бути використана для повного або часткового покриття попиту
протягом цього відрізка. Оскільки розміри виготовлених партій продукції
впливають на економічні показники виробництва, доцільно виготовляти
протягом деякого періоду обсяг продукції, що перевищує його попит в
межах цього періоду і зберігати ці надлишки до задоволення подальших
потреб, хоча зберігання запасів й передбачає витрати (плата за складські
приміщення, страхові внески і витрати на утримання запасів, тощо).
Для прийняття обґрунтованих рішень, пов’язаних з управлінням
запасами, важливим етапом є розробка та використання математичних
моделей, що дозволяють знайти оптимальний рівень запасів, мінімізуючи
суму всіх описаних видів витрат.
Розглянемо основні характеристики моделей управління запасами.
Попит. Попит на продукт, що запасається, може бути детермінованим
(в найпростішому випадку – постійним в часі) або випадковим.
Випадковість описується або випадковим моментом попиту, або
випадковим об’ємом попиту в детерміновані або випадкові моменти часу.
Поповнення складу. Поповнення складу може відбуватися або
періодично через конкретні інтервали часу, або по мірі вичерпаності
запасів, тобто зниження їх до деякого рівня.
Об’єм замовлення. При періодичному поповненні та випадковому
вичерпанні запасів об’єм заказу може залежати від того стану, який
спостерігається в момент подачі замовлення. Замовлення як правило
подається на одну і ту ж величину для досягнення заданого рівня запасів –
так званої точки замовлення.
Час доставки. В ідеалізованих моделях управління запасами
передбачається, що замовлене поповнення поставляється на склад миттєво.
В інших моделях розглядається затримка поставок на фіксований або
випадковий інтервал часу.
Вартість поставки. Як правило, передбачається, що вартість кожної
поставки складається з двох компонент – разових витрат, незалежних від
об’єму партії, що замовляється, та витрат, що залежать (частіше всього –
лінійно) від об’єму партії.
Витрати на зберігання. В більшості моделей управління запасами
вважають об’єм складу практично необмеженим, а контролюючою
величиною є об’єм запасів, що зберігаються.
Штраф за дефіцит. Любий склад створюється для того, щоб
попередити дефіцит конкретного виду виробів в системі, що
обслуговується. Відсутність запасів в потрібний момент приводить до
збитків, зв’язаних з простоєм обладнання, неритмічністю виробництва і
т.п. Ці збитки в подальшому будемо називати штрафом за дефіцит.
Номенклатура запасу. В самих простих випадках передбачається, що
на складі зберігається запас однотипних виробів або однотипної продукції.
В більш складних випадках розглядається багатономенклатурний запас.
Критерій ефективності прийнятої стратегії управління запасами −
функція затрат (витрат), яка описує сумарні витрати на зберігання та
23
поставку продукту, що запасається ( в тому числі втрати від псування
продукту при його зберіганні і його морального старіння, втрати прибутку
від омертвіння капіталу и т. п.) та витрати на штрафи.
Управління запасами − складова частина єдиної системи поточного
управління оборотним капіталом, від ефективності цього процесу залежить
можливість підтримки ліквідності та платоспроможності компанії.
Загальним критерієм оцінки ефективності даної системи і одночасно
цільовою установкою визнана мінімізація розміру витрат, пов'язаних з
формуванням і використанням запасів. Ключовою задачею, яку вирішують
фінансові менеджери, є скорочення наднормативних запасів матеріальних
цінностей, що втрачають свою вартість і фактично представляють собою
скарбничку "заморожених" коштів.
Під управлінням запасами розуміють контроль за рухом запасів і
прийняття рішень, спрямованих на економію часу і коштів за рахунок
мінімізації витрат на утримання запасів, необхідних для забезпечення
безперебійного процесу операційної діяльності компанії.
Ефективне управління товарно-матеріальними запасами (ТМЗ)
дозволяє:
− зменшити виробничі втрати із-за дефіциту сировини і матеріалів;
− прискорити оборотність цієї категорії оборотних активів;
− звести до мінімуму надлишки ТМЗ, які збільшують вартість операцій
і заморожують дефіцитні кошти;
− знизити ризик старіння та псування товарів;
− знизити витрати на зберігання ТМЗ.
Поняття "запаси" є досить містким. Цей термін застосовується як до
вироблених об'єктів, так і для природних. Загальноприйнято його
застосування в таких поняттях, як запаси корисних копалин, лісові запаси,
запаси водних ресурсів, запаси біоресурсів та ін.
Економічна трактування поняття "запаси" більш вузьке: під ними
розуміється сукупність товарно-матеріальних цінностей (предмети праці,
частина засобів праці, кінцева продукція), що знаходяться в стадії
очікування вступу в процес виробничого споживання, транспортування або
продажу. З точки зору бухгалтера запаси − це частина оборотних активів,
що перебувають у матеріальній формі, яким може бути дана вартісна оцінка.
Основні етапи управління запасами:
1. Аналіз складу, структури, динаміки загальної величини запасів за
підсумками попередніх періодів.
2. Оптимізація загальної суми запасів і розміру основних груп запасів,
що включаються до складу поточних активів.
3. Побудова ефективних систем контролю за рухом запасів в компанії.
Поточний аналіз загальної величини запасів проводиться на базі
фінансової та управлінської звітності, а також даних складського обліку.
Структура запасів аналізується в розрізі основних видів і груп з
урахуванням впливу сезонних коливань на загальну величину запасів.
24
Ретельному аналізу піддаються обсяг і структура витрат по
обслуговуванню запасів з метою їх мінімізації. В даному випадку мова йде
про вартість виконання замовлення (адміністративні, транспортні,
вантажно-розвантажувальні витрати) і витрати на зберігання запасів
(витрати по складуванню, страхування, пов'язані із спадом і старінням,
податок на майно). Крім того, компанія може понести збитки, пов'язані з
нестачею запасів (перебої у виробництві, втрати в обсязі реалізації
продукції).
Далі проводиться аналіз і дається оцінка ефективності використання
запасів. До основних показників відносяться рентабельність запасів і
тривалість обігу, яка розраховується в днях. Основна мета аналізу − пошук
шляхів прискорення оборотності запасів за рахунок управління
собівартістю реалізованої продукції (робіт, послуг) та вартістю запасів як
елемента поточних активів.
2 Типи моделей управління запасами
Різноманітність моделей управління запасами й методів
розв'язування відповідних задач, які базуються на різному математичному
апараті − від простих схем диференціального і інтегрального числення до
складних алгоритмів динамічного і інших видів математичного
програмування, − визначається характером попиту, який може бути
детермінованим або стохастичним. На рис. 2 наведена схема класифікації
попиту, який, зазвичай, використовується в моделях управління запасами.
Детермінований попит може бути статичним, в тому сенсі, що
інтенсивність споживання залишається незмінною з часом, або
динамічним, коли попит відомий достовірно, але змінюється в залежності
від часу.
Стохастичний попит є стаціонарним, якщо функція щільності
імовірності попиту незмінна в часі, і нестаціонарним, коли функція
щільності попиту змінюється в часі.
Рис. 1 Класифікація задач управління запасами за видом попиту
25
В реальних умовах випадок детермінованого статичного попиту
зустрічається доволі рідко. Такий випадок є найпростішим. Так,
наприклад, хоча попит на деякі продукти масового споживання, такі як
хліб, може змінюватися від одного дня до іншого, ці зміни можуть бути
настільки незначними, що припущення про статичність попиту несуттєво
спотворює дійсність.
Найточніше характер попиту може бути описаний за допомогою
нестаціонарних розподілів ймовірностей. Однак з математичної точки
зору модель значно ускладнюється, особливо при збільшенні періоду
часу, що розглядається. На рис. 1 ілюструється зростання математичної
складності моделі управління запасами при переході від
детермінованого статичного попиту до ймовірнісного нестаціонарного
попиту. По суті, цю класифікацію можна вважати представленням рівнів
абстрагування при описанні попиту.
На першому рівні абстрагування припускається, що розподіл
ймовірності попиту стаціонарний у часі. Це означає, що для описання
попиту протягом усіх періодів часу, що досліджуються,
використовується одна й та сама функція розподілу ймовірностей. При
такому припущенні вплив квартальних коливань попиту в моделі не
враховується.
На другому рівні абстракції враховуються зміни попиту від одного
періоду до іншого. Однак при цьому функції розподілу не
застосовуються, а потреби в кожному періоді описуються середньою
величиною попиту. Це спрощення означає, що елемент ризику в
управлінні запасами не враховується. Однак це дозволяє досліджувати
квартальні коливання попиту, які внаслідок аналітичних і
обчислювальних труднощів не можна врахувати у ймовірнісній моделі.
Іншими словами, тут виникає певний компроміс: можна
використовувати, з одного боку; стаціонарні розподіли ймовірностей, а з
іншого − змінну, але відому функцію попиту у припущенні
"визначеності".
На третьому рівні спрощення виключаються як елементи ризику, так
і зміни попиту. Тим самим попит протягом будь-якого періоду
вважається рівним середньому значенню відомого (за припущенням)
попиту для всіх періодів, що розглядаються. В результаті цього
спрощення попит можна оцінити його сталою інтенсивністю.
Хоча характер попиту є одним з основних факторів при побудові
моделі управління запасами, є й інші фактори, що впливають на вибір
типу моделі, а саме:
− запізнення надходжень виконання замовлень. Після
розміщення замовлення воно може бути поставлене відразу ж або буде
потрібний деякий час на його виконання. Інтервал часу між моментом
розміщення замовлення і його надходженням називається запізненням
замовлення або терміном виконання замовлень. Ця величина може бути
детермінованою або стохастичною;
26
− поповнення замовлення. Хоча система управління запасами
може функціонувати при запізненні надходжень, процес збільшення
запасу може здійснюватися миттєво або рівномірно в часі. Миттєве
збільшення запасу може бути реалізоване за умови, коли замовлення
надходять від зовнішнього джерела. Рівномірне збільшення може бути
тоді, коли продукція, що запасається, виробляється самою організацією.
В загальному випадку система може функціонувати при позитивному
запізненні надходження і рівномірному збільшенні запасу;
− період часу визначає інтервал, протягом якого здійснюється зміна
рівня запасу. В залежності від проміжку часу, на якому можна надійно
прогнозувати період, що розглядається, вважається скінченим або
нескінченим;
− кількість пунктів накопичення запасу. До складу системи
управління запасами може входити декілька пунктів зберігання запасу. В
деяких випадках ці пункти організовані таким чином, що один є
постачальником для іншого. Ця схема деколи реалізується на
різноманітних рівнях, так що пункт-споживач одного рівня може стати
пунктом-постачальником на іншому. В такому випадку це є система
управління запасами з розгалуженою структурою;.
− кількість видів продукції. В системі управління запасами може
фігурувати більше ніж один вид продукції. Цей фактор враховується за
умови наявності деякої залежності між різними видами продукції. Так,
для різних виробів може використовуватися одне і те ж складське
приміщення або ж виробництво може здійснюватися при обмеженнях на
загальні виробничі фонди.
3 Оптимізація величини запасів
У практиці управління запасами використовується достатній арсенал
методів планування та оптимізації їх величини.
Відомо, що проблема планування запасів може вирішуватися двома
базовими способами організації закупівель: "зі складу" (push) і "продажу"
(pull).
Система "від складу" ґрунтується на розрахунку нормативних розмірів
запасів по кожному їх виду, виходячи з характеристики швидкості обороту
по досвіду минулих років. При значних коливаннях попиту система
нормативів регулярно переглядається.
При використанні системи "від продажу" виробнича програма
формується в залежності від величини та структури цільового обсягу
продажів, що, у свою чергу, визначає бюджет закупівель. У цьому випадку
компанія орієнтована на ринковий попит і керується динамікою таких
показників, як частка ринку, еластичність попиту за ціною та ін.
Основні методи оптимізації товарно-матеріальних запасів наведені в
табл. 1.
Нормування запасів. В даний час фахівцями в області економіки та
фінансів розроблені уніфіковані методи нормування збутових запасів
27
(сировини, матеріалів, моторного палива, машинобудівної продукції) і
оборотних коштів, вкладених у відповідні запаси. Запропоновані методичні
підходи дозволяють визначити мінімально необхідний і достатній рівень
запасів для підприємства, що забезпечує стійкий процес реалізації в
сформованих ринкових умовах постачання, збуту та організації
виробництва. Норми запасів, норми та нормативи оборотних коштів
рекомендовано обчислювати на єдиній методичній основі, в один прийом, з
використанням однієї і тієї ж вихідної інформації, пов'язати їх між собою і
з рівнем надійності забезпечення запасом (тобто з оцінкою ступеня ризику).
При цьому відповідно враховується специфіка визначення самих норм
запасів, норм і нормативів оборотних коштів. Аналогічні уніфіковані
методичні підходи закладені в нормування виробничих запасів і вкладених
у них обігових коштів.
Таблиця 1
Методи оптимізації запасів
Види запасів
Запаси сировини і
матеріалів
Незавершене виробництво
Запаси готової продукції
Методи оптимізації
Нормування запасів
Визначення оптимального розміру замовлення
(модель EOQ)
Контроль запасів методом ABC
Нормування незавершеного виробництва
Бюджетування виробництва
Нормування запасів готової продукції
Визначення оптимальної партії замовлення готової
продукції
(модель EPR)
Нормою запасу називається розрахункова мінімальна кількість
предметів праці, яка має знаходитися у виробничих або торговельних
підприємств для забезпечення безперебійного постачання процесів
виготовлення продукції та її реалізації товарів.
Норма обігових коштів − відносна величина, що виражає мінімальний
економічно обґрунтований обсяг запасів матеріальних цінностей. Величина
норми залежить від умов постачання і збуту, особливостей виробничого
процесу, його тривалості, вдосконалення технологічних процесів і норм
витрачання матеріалів і т. д. На підставі економічно обґрунтованих норм
встановлюється норматив оборотних коштів, що представляє собою
мінімально необхідну суму грошових коштів, що забезпечують формування
запасів у відповідності з розрахованою нормою.
При відомій нормі запасу норматив оборотних коштів визначається як
добуток одноденного витрати (собівартості одноденного випуску) і норми в
днях (або інших відносних одиницях) з відповідного виду нормованих
активів. Одноденні витрати можуть бути обчислені як частка від ділення
суми за відповідною статтею кошторису витрат за звітний період (місяць,
квартал, рік) на кількість днів в даному звітному періоді.
28
При обчисленні норм запасів ресурсів використовують три групи
методів:
− евристичні (або дослідно-статистичні);
− техніко-економічні;
− економіко-математичні.
Евристичні методи припускають використання досвіду фахівців, які
вивчають звітність за попередній період, аналізують ринок і приймають
рішення про розмір необхідних запасів. В якості фахівця виступає працівник
підприємства, який постійно вирішує завдання нормування запасів. Такий
метод називається дослідно-статистичним. Він відтворює підхід, що
використовує експертні оцінки декількох фахівців.
Сутність методу техніко-економічних розрахунків полягає в
розчленуванні сукупного запасу в залежності від цільового призначення на
окремі групи, наприклад номенклатурні позиції. Далі для виділених груп
окремо розраховується страховий, поточний і сезонний запаси, кожен з яких
в свою чергу може бути розділений на деякі елементи. Цей метод дозволяє
досить точно визначити необхідний розмір запасів, однак трудомісткість
його велика.
Попит на товари або продукцію найчастіше є випадковим процесом,
який може бути описаний методами математичної статистики. Одним з
найбільш простих економіко-математичних методів визначення розміру
запасу є метод екстраполяції.
Розробка норм запасу − найбільш складна частина роботи визначення
потреби підприємства в оборотних коштах, тому норми можуть зберігатися
кілька років, до зміни умов виробництва, постачання і збуту.
Визначення найбільш економічного (оптимального) розміру
замовлення. Оптимізація основних груп запасів здійснюється за допомогою
моделювання. Це стосується як виробничих запасів, так і запасів готової
продукції.
Найбільш поширеною моделлю є модель економічного обгрунтування
розміру замовлення (Economic Ordering Quantity, EOQ). Розрахунок EOQ
проводиться на основі загальних сумарних витрат Q, які можна представити
у вигляді функции:
Cz = Ck + Cs + Cx + Cl + Cd
Витрати на придбання ( Ck ) визначаються вартістю одиниці продукції;
в свою чергу, вартість може бути постійною або змінною при обліку
оптових знижок, які залежать від обсягу замовлення.
Витрати на оформлення замовлення ( Cs ) − постійні витрати, пов'язані з
розміщенням замовлення у постачальників та його транспортуванням.
Витрати на зберігання запасу ( C x ) відображають витрати на утримання
та переробку запасу на складі; витрати включають як відсоток на
інвестований капітал, так і вартість зберігання, утримання і догляду.
29
Витрати від дефіциту запасу включають, по-перше, потенційні втрати (
Cl ) прибутку із-за відсутності запасу, по-друге, можливі втрати з-за втрати
( Cd ) довіри покупців.
Рис. 2 ілюструє залежність чотирьох компонент витрат узагальненої
моделі управління запасами від рівня запасу через рівні інтервали часу.
Рис. 2 Оптимальний обсяг запасу
Отже, модель управління запасами, в кінцевому рахунку, повинна дати
відповідь на два питання: Яка кількість продукції замовляти? Коли
замовляти?
Відповідь на перше питання виражається через розмір замовлення, який
визначає оптимальну кількість ресурсів, яку необхідно постачати кожен раз,
коли відбувається розміщення замовлення. Залежно від ситуації, що
розглядається, розмір замовлення може змінюватися в часі. Відповідь на
друге питання залежить від типу системи управління запасами. Якщо
система передбачає періодичний контроль стану запасу через рівні
проміжки часу (наприклад, щотижня або щомісяця), момент надходження
нового замовлення зазвичай збігається з початком кожного інтервалу часу.
Якщо ж в системі передбачений безперервний контроль стан запасу, точка
замовлення зазвичай визначається рівнем запасу, при якому необхідно
розміщувати нове замовлення.
Отже, розв'язок узагальненої задачі управління запасами визначається
в такий спосіб. У разі періодичного контролю стану запасу слід
забезпечувати поставку нової кількості ресурсів в обсязі розміру
замовлення. У разі безперервного контролю стану запасу необхідно
розміщувати нове замовлення в розмірі обсягу запасу, коли його рівень
досягає точки замовлення. Оптимальний рівень запасу відповідає мінімуму
сумарних витрат. Відзначимо, що модель управління запасами не
обов'язково повинна включати всі чотири види витрат, тому що деякі з них
можуть бути незначними, а іноді облік всіх видів витрат надмірно
30
ускладнює функцію сумарних витрат. На практиці будь-яку компоненту
витрат можна не враховувати за умови, що вона не становить істотну
частину загальних витрат.
4 Прості моделі управління запасами
Нехай функції A(t), B(t), та R(t) виражають відповідно поповнення
запасів, їх витрати та попит на продукт що запасається на проміжку часу
[0, t]. В моделях управління запасами використовуються похідні цих
функцій за часом a(t), b(t), r(t), що називаються відповідно
інтенсивностями поповнення, витрат та попиту.
Якщо функції a(t), b(t), r(t), − не випадкові величини, то модель
управління запасами вважається детермінованою, якщо хоча б одна із
них носить випадковий характер – стохастичною. Якщо всі параметри
моделі не змінюються в часі, вона називається статичною, інакше –
динамічною. Статичні моделі використовуються, коли приймається
разове рішення про рівень запасів на певний період, а динамічні – у
випадку прийняття послідовних рішень про рівні запасу чи корегування
раніше прийнятих рішень з врахуванням змін що відбуваються.
Рівень запасу в момент t визначається основним рівнянням запасі
J (t ) = J 0 + A(t ) − B(t ) ,
(1)
де J 0 − початковий запас в момент часу момент t =0.
Рівняння (1) частіше використовують в інтегральній формі:
t
t
J (t ) = J 0 + a(t )dt − b(t )dt.
0
(2)
0
Приклад 1. Інтенсивність надходження деталей на склад готової
продукції цеха складає на початку зміни 5 дет./хв., на протязі першої
години лінійно росте, досягаючи до кінця її 10 дет./хв., а потім
залишається постійною. Припускаючи, що надходження деталей на склад
відбувається безперервно на протязі всіх семи годин зміни, а вивіз
деталей зі складу виконується лише в кінці роботи, записати вираз для
рівня запасу в довільний момент часу та, використовуючи його, знайти
кількість деталей на складі: а) через 30 хв. після початку роботи; б) в кінці
зміни.
Розв'язання. За умовою протягом зміни не відбувається видача
деталей зі складу, тобто b(t)=0. Інтенсивність поповнення запасу на
протязі першої години лінійно зростає, тобто а(t)=kt+b. Враховуючи, що
а(0)=5, отримуємо b=5. Так як в кінці першої години, тобто при t=60
a(60)=10, тоді 10=k 60+5,звідки k=1/12. Таким чином, для першої
години зміни a(t)=(1/12)t+ , а тоді a(t)=10. Враховуючи тривалість зміни
(7 год. = 420 хв.) та співвідношення (2), отримаємо:
t
J (t ) = (t /12 + 5)dt = t 2 / 24 + 5t , якщо 0 t 60 ,
0
і
31
60
t
J (t ) = (t /12 + 5)dt + 10dt = t 2 / 24 + 5t
0
60
0
+ 10t 60 = 10t − 150, якщо
t
60
60 t 420 .
Кількість деталей на складі через 30 хв. після початку роботи:
J(30)=900/24+5 30=187,5, а в кінці зміни: J(420)=10 420−150=4050.
5 Статична детермінована модель без дефіциту
Припущення про те, що дефіцит не допускається, означає повне
задоволення попиту на продукт, що запасається, тобто збігання функцій r(t)
та b(t). Нехай загальне споживання продукту що запасається за розглянутий
інтервал часу θ дорівнює N. Розглянемо просту модель, в якій
передбачається, що витрати запасу відбуваються безперервно з постійною
інтенсивністю, тобто b(t)=b. Цю інтенсивність можна знайти, розділивши
загальне споживання продукту на час, на протязі якого він витрачається:
N
b= .
(3)
Поповнення заказу відбувається партіями однакового об’єму, тобто
функція a(t) не являється безперервною: a(t)=0 при всіх t, крім моментів
поставки продукту, коли a(t)=n, де n – об’єм партії. Так як інтенсивність в
итрат дорівнює b, то вся партія буде використана за час
n
T= .
(4)
b
Якщо відлік часу почати з моменту надходження першої партії, то
рівень запасу в початковий момент дорівнює об’єму цієї партії n,тобто
J(0)=n. Графічно рівень запасу в залежності від часу представлено на рис. 2.
Рис. 2. Залежність рівня запасу від часу
На протязі часового інтервалу [0,T] рівень запасу зменшується по
прямій J(t)=n−bt від значення n до нуля. Оскільки дефіцит не
допускається, то в момент Т рівень запасу миттєво поповнюється до
попереднього значення n за рахунок надходження партії заказу. Таким
32
чином процес зміни J(t) повторюється на кожному часовому інтервалі
тривалістю Т (див. рис. 2).
При формуванні основної моделі розрахунку EOQ в якості критерію
оптимізації приймається мінімум загальних витрат, що включають
витрати на виконання замовлень і витрати на зберігання запасу на складі
протягом певного періоду часу (рік, квартал тощо).
Постановка задачі: визначити такий об’єм партії n, при якому
сумарні витрати на створення та зберігання запасу були б мінімальними.
Позначимо сумарні витрати через С, витрати на створення запасу –
через С1, а витрати на зберігання запасу – через С2 та знайдемо ці
величини за весь проміжок часу Т.
Нехай витрати на доставку однієї партії продукту, незалежно від
об’єм партії, дорівнюють с1, а затрати на зберігання однієї одиниці
продукції за одиницю часу – с2. Оскільки за час θ необхідно запастись N
одиницями продукту, який поставляється партіями об’єму n, то число
таких партій k дорівнює:
N
k= = .
(5)
n T
Звідси отримуємо
N
C1 = c1k = c1 .
(6)
n
Моментальні витрати зберігання запасу в момент часу t дорівнюють
c2J(t). Значить за проміжок часу [0,T] вони складуть
T
T
0
0
c2 J (t )dt = c2 (n − bt )dt
або, враховуючи (4):
T
n
nt 2
c2 nT
c2 J (t )dt = c2 n − t dt = c2 nt −
=
.
T
2T 0
2
0
0
Середній запас за проміжок [0,T] дорівнює nT/2, тобто витрати на
зберігання всього запасу при лінійних (за часом) його витратах,
дорівнюють витратам на зберігання середнього запасу.
Враховуючи періодичність функції J(t) (всього за проміжок часу θ
буде k=N/n «зубців», аналогічних тим, що розглядалися на відрізку [0,T]),
та формулу (5), отримуємо, що затрати зберігання запасу за проміжок
часу θ дорівнюють:
c nT
c nT N c TN c2n
C2 = 2 k = 2 = 2
=
.
2
2
n
2
2
(7)
Неважко помітити, що затрати С1 обернено пропорційні, а затрати С2
прямо пропорціональні об’єму партії n. Графіки функцій C1(n) та C2(n), а
також функції сумарних затрат
T
T
33
c1 N c2n
+
n
2
представлені на рис. 3.
В точці мінімуму функції C (n) її похідна
cN c
C(n) = − 1 2 + 2 = 0 ,
n
2
звідки отримуємо
2c1 N
,
n0 =
c2
C=
(8)
(9)
Рис. 3. Функція сумарних витрат
або, враховуючи (3):
2c1b
.
(10)
c2
Формула (10) називається формулою Уїлсона (Вілсона) або
формулою найбільш економічного об’єму партії. Ця формула може бути
отримана і іншим способом, якщо врахувати, що добуток С1С2=0,5с1с2Nθ
є величина постійна, незалежна від n. В цьому випадку, як відомо, сума
двох величин приймає найменше значення, коли вони рівні, тобто С1=С2
або
c1 N c2n
=
,
(11)
n
2
звідки отримаємо (9).
Із (11) випливає, що мінімум загальних затрат задачі управління
запасами досягається тоді, коли затрати на створення запасу дорівнюють
затратам на збереження запасів. При цьому мінімальні сумарні затрати
2c N
C0 = C (n0 ) = 1 ,
(12)
n
Звідки, враховуючи (9) та (3), отримаємо C0 = 2c1c2N або
n0 =
C0 = 2c1c2b .
(13)
34
Число оптимальних партій за час з урахуванням (5), (9) і (3)
дорівнює:
N
c N
cb
k0 = = 2
= 2 .
n0
2c1
2c1
Час витрати оптимальної партії на основі (4) з урахуванням (9) та (3)
дорівнює
n
T0 = 0 = n0 ,
(14)
b
N
або
2c1
2c1
.
(15)
T0 =
=
c2 N
bc2
Приклад 2.Потреба складального підприємства в деталях певного
типу складає 120000 деталей на рік, причому ці деталі витрачаються в
процесі виробництва рівномірно та безперервно. Деталі замовляються
раз на рік та поставляються партіями однакового об’єму, вказаного в
замовлені. Зберігання деталі на складі коштує 0,35 грошових одиниць на
добу, а поставка партії – 10000 грош. одиниць. Затримка виробництва ізза відсутності деталей недопустима. Встановити найбільш економічний
об’єм партії та інтервал між поставками, які необхідно вказати в
замовлені (постачальник не допускає затримки поставок).
Розв'язння. За умовою затрати на одну партію складають с1=10000
грош.од., загальний проміжок часу θ=1 рік =365 днів, а загальний об’єм
запасу за цей період N=120000 деталей. За формулою (9)
2 10000 120000
n0 =
4335 дет.,
0,35 365
а за формулою (14):
T0 = n0 13 днів.
N
Отже, найбільш економічний об’єм партії дорівнює 4335 деталей, а
інтервал між поставками − приблизно 13 днів.
На практиці ж об’єм партії може відрізнятися від отриманого n0,
розрахованого за формулою (9). Так, в попередній задачі може виявитися
зручним замовити партії по 4500 або навіть по 5000 деталей і виникає
питання, як при цьому змінюються сумарні затрати.
Для відповіді на це запитання розложимо функцію C(n) в ряд
Тейлора навколо точки n0, обмежившись першими трьома членами ряду
при достатньо малих змінах об’єму партії ∆n:
C(n0 ) 2
C (n) = C (n0 ) + C(n0 )n +
n + ...
2!
2c N
Враховуючи, що при n = n0 C(n0 ) = 0, C(n0 ) = 13 , а C0 = C (n0 ) ,
n0
отримаємо:
35
C C (n) − C (n0 ) C (n0 )n 2
2c1 N n 2
=
=
C0
C (n0 )
2C (n0 )
2c N
n03 1
n0
або
C n 2
2 .
(16)
C0
n0
Формула (16) свідчить про певну стійкість сумарних затрат у
відношенні до найбільш економічного об’єму партії, так як при малих ∆n
відносні зміни затрат приблизно на порядок менші відносної зміни
об’єму партії в порівнянні з оптимальним.
Приклад 3. За умовою прикладу 2 визначити, на скільки процентів
збільшаться затрати на створення та зберігання запасу в порівнянні з
мінімальними затратами при об’ємі замовляємих партій 5000 деталей.
Розв'язання. Відносна зміна об’єму партії в порівнянні з
оптимальним n0=4335 складає ∆n/n0=(5000−4335)/4335=0,153. У
відповідності до (2.16) відносна зміна сумарних затрат складе
∆C/C0=0,1532/2≈0,012, або всього 1.2%.
Приклад 4. В умові прикладу 3 припустимо, що замовляються не всі
партії відразу, а кожна окремо, причому строк виконання замовлення
дорівнює 16 днів. Визначити точки замовлення, тобто при якому рівні
запасу слід замовляти наступну партію.
Розв'язання. Так як за результатами рішення задачі 2 довжина
інтервалу між поставками дорівнює 13,2 днів, то замовлення в умовах
неналежного виробництва потрібно відновити, коли рівень запасу
достатній для задоволення потреби на 16−13,2=2,8 дні. Так як щоденна
необхідність (інтенсивність витрат запасу) дорівнює за формулою (2.3)
b=120000/365=329 деталей, то замовлення повинні робитися регулярно
при досягненні рівня запасу 329 2,8≈922 деталі.
6 Використання моделі Уїлсона управління запасами. Розрахунки в
Microsoft Excel
Модель Уїлсона − це найпростіша модель управління запасами, яка
передбачає відсутність невизначеностей. Ця модель лежить в основі більш
складних і розвинених моделей управління запасами.
У простій моделі все цілком передбачувано, інтенсивність попиту відома
і постійна. Запас на складі поповнюється періодично і однаковими
поставками (партіями).
Вхідні параметри:
− інтенсивність споживання запасу, [один. товару/один. часу]
v
s
− витрати на зберігання запасу, [грош. один./(один. часу один.
часу]
− витрати на здійснення замовлення, [грош. один.]
K
Вихідні параметри:
36
− розмір замовлення, [один. товару]
− період поставки, [один. часу]
− загальні витрати на управління запасами в одиницю часу,
[грош. один. /один. часу]
− точка замовлення, [один. товару]
h0
Допущення моделі Уїлсона:
1) v = const ,
2) = const ,
3) кожне замовлення поставляється однією партією,
4) витрати на здійснення замовлення K не залежать від розміру
замовлення,
5) відсутність запасу недопустима,
6) чергова партія замовлення має надходити в момент, коли запас на складі
знижується в точності до нуля,
7) розмір партії та довжина циклу пов’язані співвідношенням:
(17)
Q = vT .
Типова динаміка величини складського запасу за часом представлена на
графіку (рис. 3)
Q
L
Рис. 3 Графік циклів зміни запасів в моделі Уїлсона
Можна поповнювати запас великими партіями через довгі проміжки часу,
а можна малими партіями і через короткі проміжки. Задача − визначити
оптимальний розмір партії і, відповідно, оптимальну довжину циклу.
Формули моделі Уїлсона
2 Kv
,
(18)
Q* =
s
v
Q
L=K +s .
(19)
Q
2
При коротких циклах (часті поставки невеликими партіями) витрати
будуть значними за рахунок першого доданка. При довгих циклах (рідкісні
поставки великими партіями) − за рахунок другого.
37
Поставка партії на склад вимагає певного часу. Позначимо термін
поставки (період попередження) Td . Для того, щоб замовлена партія
поступила точно в необхідний момент, замовлення слід подавати
заздалегідь, за час Td до цього моменту. У момент надходження обсяг запасу
має дорівнювати 0. Отже, в момент подачі замовлення обсяг запасу на складі
повинен складати величину h0 :
h0 = vTd ,
(20)
Q
= .
(21)
v
Розглянемо приклад розрахунку за моделлю Уїлсона. Оскільки
розмір реального замовлення Q може не збігатися з Q * , розрахованого
за формулою (17), то в блок вхідних даних необхідно ввести Прийнятий
розмір замовлення, який буде використовуватися при обчисленні
розрахункових параметрів.
Форма розрахунку наведена на рис. 4.
Рис. 4 Формули розрахунків
Визначимо стратегію управління запасами для наступного прикладу. При
будівництві необхідно поповнити запас залізобетонних виробів Ж/Б ВВП 928-Зт. Вага одного виробу становить p = 693 кг. Витрати на зберігання
виробів на складі будівництва складають на добу s = 29 гривень за тонну.
Витрати на оформлення одного замовлення дорівнюють Kоф = 34,9 грн.
Доставка вантажів на склад може здійснюватися залізничним вагоном, що
вміщує в себе до m1 = 40 т вантажу, або вантажними машинами, кожна з яких
розрахована максимально на m2 = 3 т вантажу. Витрати на використання
38
одного рейсу вагона становлять K1 = 1408 грн., а вартість одної машиногодини вантажної машини − K2 = 262 грн.
Доставка вагоном займає Td 1 = 1,5 дня, а доставка вантажними машинами
− Td 2 = 0,5 дня. Робота з даними залізобетонними виробами має бути
закінчена не пізніше, ніж за Tmax = 19 днів.
Якщо в транспортний засіб (вагон або машину) не вміщається обсяг
замовлення, знайдений за формулою Уїлсона, то необхідно розглянути
наступні варіанти доставки:
− доставляти таку кількість виробів, яка вміщується в транспортний засіб;
− використовувати для доставки не один, а кілька транспортних засобів
(наприклад, два), але при цьому змінитися витрати на доставку (збільшаться
в 2 рази), а значить і зміниться Q*.
Основна ідея рішення полягає в розгляді декількох варіантів доставки і
вибору мінімального за витратами на управління запасами. Витрати на
здійснення замовлення включають витрати на оформлення замовлення і на
доставку. Розрахунок при доставці автотранспортом (на 1 автомобіль)
наведено на рис. 5.
Рис. 5. Визначення обсягу поставки
Розмір замовлення становить 10 штук, для транспортування яких потрібно
2 автомобіля. Отже, зміняться витрати на доставку.
Якщо використовувати два автомобіля більшої вантажопідйомності, то
оптимальним обсягом замовлення буде 14 виробів, період поставки складе
1,4 дня, замовляти потрібно в момент, коли на складі залишається 5 одиниць
запасу. Стратегія управління запасами при залізничних перевезеннях
приведена на рис. 7.
39
Як видно з даних розрахунку, при залізничних перевезеннях зростає
період поставки і точка замовлення, але значно збільшуються витрати на
запаси. Таким чином, для даного виду виробів вигідніше автомобільні
перевезення.
Рис. 6. Стратегія управління запасами при автомобільних перевезеннях
Рис. 7 Стратегія управління запасами при залізничних перевезеннях
40
7 Системи контролю за станом запасів
Управління запасами передбачає організацію контролю за їх
фактичним станом. Необхідність організації служби такого контролю
обумовлена підвищенням витрат у разі виходу фактичного розміру запасу
за рамки, передбачені нормами запасу.
В цілому можна виділити наступні системи контролю за станом запасів:
− з фіксованою періодичністю замовлення;
− з фіксованим розміром замовлення.
Решта системи − різновиди цих двох систем.
Контроль стану запасів по системі з фіксованою періодичністю
замовлення здійснюється через рівні проміжки часу за допомогою
проведення інвентаризації залишків. За результатами перевірки
здійснюється замовлення на поставку нової партії товарів. Розмір
замовляється партії товару визначається різницею передбаченого нормою
максимального товарного запасу і фактичного запасу. Оскільки для
виконання замовлення потрібен певний період часу, то величина замовленої
партії збільшується на розмір очікуваного витрати на цей період. Розмір
замовляється партії (Р) визначається за такою формулою:
Р=Змакс − (Зф − Зт),
(22)
де Змакс − передбачений нормою максимальний запас; З ф − фактичний запас
на момент перевірки; Зт − запас, який буде витрачений протягом розміщення
та виконання замовлення.
Графічно модель системи контролю за станом запасу з фіксованою
періодичність замовлення представлена на рис. 8.
час, дні
Рис. 8. Система контролю за станом запасів з фіксованою
періодичністю замовлення
Тут використані такі умовні позначення:
41
Т − інтервал часу, через який повторюється замовлення (в нашому
випадку − 3 дні) − для даної системи величина постійна;
t − час, необхідний на розміщення та виконання замовлення (в
наведеному прикладі − 1 день);
Р1, Р2, ..., Рi − величина окремого, i-го замовлення;
Зt − запас, що витрачається за час t, необхідне для розміщення та
виконання замовлення;
А − період часу з інтенсивним попитом;
В − період часу з нульовим запасом.
Інтенсівность попиту, що характеризується кутом нахилу ділянок лінії,
описує зміна запасів, у цій моделі є величиною змінної (кут нахилу різних
ділянок ламаної − неоднаковий). А оскільки замовлення здійснюється через
рівні проміжки часу, то величина замовленої партії в різних періодах також
буде різна. Природно, застосовувати цю систему можна тоді, коли є
можливість замовляти партії, різні за величиною (наприклад, в разі
застосування контейнерної доставки товару, що замовляється ця система не
може бути застосована). Крім того, систему не застосовують, якщо доставка
або розміщення замовлення обходиться дорого. Наприклад, якщо попит за
минулий період не була значний, то замовлення також буде незначний, що
допустимо лише за умови не суттєвості витрат, пов'язаних з виконанням
замовлення.
Особливістю описуваної системи є також і те, що вона допускає
виникнення дефіциту. Як видно з графіка, якщо попит різко посилиться
(тобто графік круто піде вниз − ділянка А), то запас закінчиться до настання
терміну подання замовлення. Це означає, що система може бути
застосована, коли можливі втрати від дефіциту для підприємства також
несуттєві.
Система контролю з фіксованою періодичність замовлення
застосовується в наступних випадках:
− умови поставки дозволяють отримувати замовлення різними за
величиною партіями;
− витрати з розміщення замовлення та доставки порівняно невеликі;
− втрати від можливого дефіциту порівняно невеликі.
На практиці за даною системою можна замовляти один з багатьох
товарів, що закуповуються у одного і того ж постачальника, товари, на які
рівень попиту відносно постійний, малоцінні товари і т.д.
В системі контролю за станом запасів з фіксованим розміром
замовлення розмір замовлення на поповнення запасу є величиною
незмінною. Інтервали часу, через які проводиться розміщення замовлення,
в цьому випадку можуть бути різними (див. рис. 9).
Умовні позначення:
Т1, Т2, ..., Тi − величина окремого i-го періоду часу, через який
повторюється замовлення;
t − час, необхідний на розміщення та виконання замовлення (в
наведеному прикладі − 1 день);
42
Р − розмір замовлення, для даної системи контролю величина постійна;
А − період непередбаченого посилення попиту;
В − період, в якому було допущено порушення встановленого терміну
поставки;
t ' − фактичний термін поставки в період В.
Рис. 8. Система контролю за станом запасів з фіксованим розміром замовлення
Величинами, що нормуються, в цій системі є величина замовлення,
розмір запасу в момент розміщення замовлення (так звана точка
замовлення) і величина страхового запасу. Замовлення на поставку
розміщується при зменшенні наявного запасу до точки замовлення. Як
випливає з даних рис. 9, після розміщення замовлення запас продовжує
зменшуватися, так як замовлений товар привозять не відразу, а через якийсь
проміжок часу t. Величина запасу в точці замовлення вибирається такий,
щоб в нормальній, робочої ситуації за час t запас не опустився нижче
страхового. Якщо ж попит непередбачено збільшиться (лінія графіка різко
піде вниз − ділянку А графіка), або ж
буде порушений термін поставки (t ' > t − ділянку В графіка), то почне
працювати страховий запас. Комерційна служба підприємства в цьому
випадку повинна вжити заходів, що забезпечують додаткову поставку. Дана
система контролю передбачає захист підприємства від утворення дефіциту.
На практиці система контролю за станом запасу з фіксованою кількістю
замовлення застосовується переважно в наступних випадках:
− великі втрати в результаті відсутності запасу;
− високі витрати по зберіганню запасів;
− висока вартість товару, що замовляється;
− високий ступінь невизначеності попиту;
43
− наявність знижки з ціни залежно від замовленого кількості.
Система з фіксованим розміром замовлення передбачає безперервний
облік залишків для визначення точки замовлення. Після того як зроблений
вибір системи поповнення запасів, необхідно кількісно визначити величину
замовленої партії, а також інтервал часу, через який повторюється
замовлення.
8 Додаткові методи управління запасами
Найбільш поширеними додатковими системами управління запасами є:
♦ система з встановленою періодичністю поповнення запасів до
певного рівня;
♦ система "мінімум-максимум".
В системі з встановленою періодичністю поповнення запасів до
певного рівня, як і в системі з фіксованим інтервалом часу між
замовленнями, вхідним параметром є період часу між замовленнями. На
відміну від основної системи, вона зорієнтована на роботу при значних
коливаннях споживання. Щоб запобігти завищенню обсягів запасів, які
знаходяться на складі, або їх дефіциту, замовлення виробляються не тільки
у встановлені моменти часу, але і за досягнення запасом граничного рівня.
Система включає в себе елемент P-моделі, тобто встановлену періодичність
оформлення замовлення, і елемент Q-моделі, тобто відстеження граничного
рівня замовлення.
Відмінною особливістю системи є те, що замовлення поділяються на
дві категорії − планові і додаткові. Планові замовлення виробляються через
задані інтервали часу, а додаткові замовлення − відхилення темпів
споживання від запланованих.
Система "мінімум-максимум" також містить у собі елементи основних
систем управління. Система орієнтована на ситуацію, коли витрати на облік
запасів і витрати на оформлення замовлення настільки значні, що стають
порівнянні з втратами від дефіциту запасів. Тому в даній системі замовлення
виробляються не через кожен заданий інтервал часу, а тільки за умови, що
запаси на складі в цей момент виявилися рівними або меншими
встановленого мінімального рівня. У цьому випадку розмір розраховується
так. щоб постачання поповнило запаси до максимально бажаного рівня.
Таким чином, система працює лише з двома рівнями запасів − мінімальним
і максимальним.
Рекомендована література, інформаційні ресурси
1. Исследование операций в экономике. Учебное пособие для вузов / Под редакцией
Н.Ш. Кремера. − М.: Банки и биржи, ЮНИТИ, 1997. − 407 с.
2. Таха Ч. Введение в исследование операций. – М.: Мир, 1985. – Т. 1, 2.
3. Акулич И.Л. Математическое программирование в примерах и задачах. − М.: Высш.
шк., 1985. – 320 с.
4. Романюк Т.П., Терещенко Т.О., Присенко Г.В., Городкова І.М. Математичне
програмування: Навч. посібник − К.: ІЗМН, 1996.
44
Варіанти завдань для самостійної та індивідуальної роботи
Задача1. Страхова фірма протягом року розміщує замовлення та поповнює запаси
різноманітних офісних товарів і канцелярського приладдя, необхідних для
забезпечення її діяльності. Відомо, що: річний обсяг використання фірмою паперу −
6000 пачок; вартість однієї пачки − 2,5 грн; середня вартість виконання замовлення
(незалежно від його обсягу) − 15 грн; витрати на зберігання однієї пачки паперу на
складі фірми − 20 % від витрат на її придбання.
Розрахувати обсяг замовлення, витрати фірми на виконання замовлень, на
зберігання запасу паперу та сукупні витрати для кількості замовлень на рік від 8 до 12.
Результати розрахунків занести в таблицю за наведеною нижче формою; за
отриманими даними побудувати графік; у розрахунковий та графічний способи
визначити оптимальний розмір замовлення та оптимальну кількість замовлень на рік.
Таблиця. Підсумкові дані
Показник
Кількість замовлень на рік
Обсяг замовлення, пачок
Вартість збереження запасу, грн.
Вартість виконання замовлення, грн.
Сукупні витрати, грн
Задача 2. Фірма виробляє радіоприймачі. Щорічно вона купує 120000 друкарських
плат для використання їх при монтажі продукції. Вартість однієї плати – 0,33 у.о./шт.,
вартість зберігання – 0,12 у.о./шт. за рік, витрати замовлення - 150 у.о. за одне
замовлення. Робочий період – 350 днів. Завдання. Розрахувати оптимальний розмір
замовлення, точку відновлення замовлення.
Задача 3. Менеджер магазину роздрібної торгівлі оцінює річний попит на молочну
продукцію фірми «Баланс» у 100000 шт. Витрати на замовлення становлять 50 грн.
Витрати зберігання – 0,10 грн./рік (шт.). Розрахувати: оптимальне замовлення;
кількість замовлень і денну кількість продажу, якщо магазин працює 360 днів на рік;
якщо термін виконання замовлення 5 днів, розрахуйте точку відновлення замовлення.
Задача 4. Магазин – салон, що продає мобільні телефони, прогнозує стійкий попит на
телефони «NOKIA» у розмірі 10 тел/ тиждень. У зв’язку з тим, що попит на телефони
постійно зростає, фірма – постачальник пропонує магазину зарезервувати певну
кількість телефонів. Витрати на зберігання 12 грн./рік, витрати резервування – 10
грн./шт.(за рік), витрати на оформлення замовлення – 150 грн. Усього протягом року
магазин має 48 робочих тижнів. Розрахувати: оптимальне замовлення; оптимальну
кількість зарезервованих одиниць; кількість замовлень.
Задача 5. Підприємство виготовляє велосипеди. Виробництво рівномірно і щоденна
потреба в рамках становить 25 шт. Як правило, постачальник виконує замовлення
протягом двох тижнів. Підприємство працює протягом 280 днів на рік. Кількість
замовлень (на рік) становить 12. Розрахувати: розмір оптимального замовлення; час
між замовленнями; точку відновлення замовлення.
Задача 6. Випуск товарної продукції запланований в обсязі 8 млн. грн. На початок
року залишок товарної продукції на складі становив 0,5 млн. гри. Вартість
відвантаженої, але неоплаченої продукції −0,3 млн. грн. Залишок товарної продукції,
45
що планується на кінець року, має становити 0,2 млн. грн. Визначте обсяг
запланованої реалізованої продукції.
Задача 7. У звітному періоді підприємство виготовило виробів А − 300 од., Б − 180
од., вартість виробу А − 1530 грн., Б − 2350 грн. Вартість послуг промислового
характеру, наданих стороннім підприємствам − 21 тис. 600 грн. Залишок
спеціалізованого технологічного оснащення на початок року − 25 тис. грн., на кінець
року −12 тис. грн. Визначте обсяг валової продукції.
Задача 8. Обчисліть величину валової продукції та її зміну в плановому році, якщо у
звітному році обсяг валової продукції становив 750 тис. грн. У плановому році
підприємство передбачає виготовити продукції на суму 720 тис. грн. Частина її на
суму 40 тис. грн піде на внутрішні потреби. Незавершене виробництво за плановий
рік зміниться на 10 тис. грн. Додатково підприємством буде виготовлено
напівфабрикатів для реалізації на сторону на 20 тис. грн.
Задача 9. Потрібне розрахувати обсяг незавершеного виробництва на кінець
планового періоду у вартісному виразі та трудовому вимірі, виходячи з таких даних:
за рік завод виготовляє 320 виробів. Трудомісткість виробу становить 840 нормо-год.,
тривалість циклу виготовлення виробу − 25 днів, планова собівартість − 1250 грн,
матеріальні витрати в ній становлять − 70%. У незавершеному виробництві
знаходиться в середньому 62 вироби.
Задача 10. Замовлення на виробництво партії двигунів в обсязі 20 од. має бути
виконане до 01.08. Вироби виготовляють у заготівельному, механічному і
складальному цехах. Тривалість циклів виробництва (в змінах) за стадіями становить Т
ц.збір = 13, Тц.мех = 21, Тц.заг = 16. Визначте можливу дату початку виробництва двигунів
і значення резервних випереджень між цехами. Найбільша можливість зриву терміну
виконання замовлення в заготівельному цеху. Режим роботи заводу − без вихідних днів
у дві зміни, тривалістю по 8 год.
Задача 11. В деякій фірмі працюватимуть 1000 інженерів. Плинність в середньому
становить 50 осіб на рік. Перед тим як приступити до роботи, знову прийняті інженери
проходять в фірмі стажування, яка обходиться в 25000 руб. на людину. Якщо немає
можливості надати місце новому інженеру по закінченні стажування, то фірма втрачає
500 руб. на людину в місяць. Визначити, скільки інженерів слід приймати на стажування,
з якою частотою слід її організовувати.
Задача 12. Деяка компанія виробляє товар, річний попит на який дорівнює 5000
одиниць. Витрати зберігання складають 20 у.о. за одиницю товару в рік, а подача одного
замовлення незалежно від розміру обходиться компанії в 30 у.о. Величину попиту можна
вважати постійною. Втрати від браку запасів становлять 10 у.о. на одиницю товару.
Задача 13. Обсяг продажу деякого магазину складає b = 500 упаковок пакетного
супу в рік. Величина попиту рівномірно розподіляється протягом року. Ціна покупки
одного пакета дорівнює 2 у.о., за одне замовлення власник магазину повинен заплатити
c1 = 10 у.о. Час доставки замовлення від постачальника складає 12 робочих днів (при 6денному робочому тижні). За оцінками фахівців, витрати зберігання складають 20%
середньорічної вартості запасів. Скільки пакетів повинен замовляти власник магазину
кожен раз, якщо його мета полягає в мінімізації загальної вартості запасів?
46
Задача 14. а нафтобазу бензин привозять на танкері. Накладні витрати g в
розрахунку на партію бензину складають 50000 руб. Щорічно база відпускає μ = 4000
т бензину. Витрати на зберігання h приймемо рівним 0,5 руб. за 1 т бензину на добу.
Поставка здійснюється на першу вимогу - миттєво, і дефіцит бензину на базі не
допускається. Знайдіть оптимальні: обсяг продукції, що замовляється партії q,
тривалість циклу Т * роботи системи і загальні середньодобові витрати
.
Задача 15. Завод радіоелектронної апаратури виробляє x1 радіоприймачів на добу.
Мікросхеми для радіоприймачів (по 1 шт. на приймач) виробляється на цьому ж заводі з
інтенсивністю x2 тис. шт. на добу. Витрати на підготовку виробництва партії мікросхем
складають
x3 грн., собівартість виробництва 1 тис. шт. мікросхем дорівнює x4 грн.
Зберігання мікросхем на складі обходиться заводу в x5 грн. за кожну тисячу на добу. У
завода з’явилась можливість закуповувати мікросхеми в другому місті за ціною x6 грн.
за 1 тис. шт. Вартість доставки дорівнює x7 грн. З'ясуйте, чи варто заводу закуповувати
мікросхеми замість того, щоб їх виробляти. Для більш вигідного режиму роботи заводу
(виробництво або закупівля) визначте періодичність подання замовлення, і витрати на
управління запасами в місяць (22 робочих дня). (при різних значеннях змінних)
Задача 16. Річний попит D = 400 одиниць, вартість подачі козака-за C0 = 40 рублів
/ замовлення, витрати зберігання однієї одиниці Ch = 250 рублів / год, час доставки 6
днів, 1 рік = 250 робочих днів. Знайти оптимальний розмір замовлення, витрати, рівень
повторного замовлення, число циклів за рік, відстань між циклами.
Задача 17. Річний попит D = 1500 одиниць, вартість подачі за- каза C0 = 150
рублів / замовлення, витрати зберігання однієї одиниці Ch = = 45 рублів / год, час
доставки 6 днів, 1 рік = 300 робочих днів. Знайдемо оптимальний розмір замовлення,
витрати, рівень повторного замовлення.
Задача 18. Річний попит D = 8000 одиниць, вартість организації виробничого
циклу Cs = 200 рублів, витрати зберігання однієї одиниці Ch = 15 рублів / год. Знайти
економічний розмір партії, витрати, число циклів за рік, відстань між циклами.
Задача 19. План річного випуску продукції виробничого підприємства становить
800 одиниць, при цьому на кожну одиницю готової продукції потрібно 2 одиниці
комплектуючого виробу КІ-1. Відомо, що вартість подачі одного замовлення складає
200 руб. Ціна одиниці комплектуючого виробу – 480 руб. Вартість утримання
комплектуючого виробу на складі становить 15% його ціни. Визначити оптимальний
розмір замовлення на комплектуючий виріб КІ-1.
Задача 20. Розрахувати параметри системи управління запасами з
фіксі¬рованним розміром замовлення для виробничого підприємства. План річного
випуску продукції виробничого підприємства становить 800 одиниць, при цьому на
кожну одиницю готової продукції потрібно 2 одиниці комплектуючого виробу КІ-1.
Відомо, що вартість подачі одного замовлення складає 200 руб., Ціна одиниці
комплектуючого виробу - 480 руб., А вартість утримання комплектуючого виробу на
складі становить 15% його ціни. Час поставки, вказане в договорі про постачання,
становить 10 днів, можлива затримка поставки - 2 дня. Число робочих днів у році - 226
днів. Необхідно розрахувати параметри системи управління запасами з фіксованим
розміром замовлення.
47
Задача 21. Потреба станкосборочного цеху в заготовках деякого типу становить
36 тис.шт. на рік. Дефіцит заготовок не допускається. Витрати розміщення замовлення
− 50 грош, витрати утримання однієї заготовки на рік рівні 5 грош Середній час
реалізації замовлення − 10 днів. Визначити: оптимальну партію поставки;
періодичність відновлення поставок; точку розміщення замовлення; сумарні річні
витрати.
Поточні контрольні запитання
1. Розкрийте сутність виробничого планування.
2. Розкрийте ключові аспекти системи управління запасами.
3. Яка основна мета управління запасами?
4. Види запасів, назвіть їх та охарактеризуйте.
5. Які бувають форми структурної побудови відділів збуту?
6. В чому сутність збуту продукції?
7. Охарактеризуйте основні шляхи економії матеріалів.
8. Яку роль виконую на підприємстві матеріально-технічне забезпечення
виробництва?
9. Розкрийте транзитну і складську форму постачання.
Практичне заняття № 1
Тема: графічний спосіб розв'яз ання задач нелінійної умовної оптимізації.
Задачі для аудиторної роботи
Розв'язати задачі нелінійного програмування графічним методом та
аналітично.
1
2
2
2
2
f = 2 ( x1 − 2 ) + 3( x2 − 2 ) → extr 2 z ( x, y ) = 2 x + 2 y − 16 x + 6 y + 1 → extr
x1 + x2 12
x + 8 у 16;
6 x − у = 3.
f = ( x1 − 1) + ( x2 + 4 ) → extr
3 x1 + 2 x2 12
8 x − x 10
1 2
− x1 + 3 x2 3
x1 0
5
x12 + x22 → extr
3
2
2
f = ( x1 − 1) + ( x2 − 3) → extr
2 x1 + x2 18
−2 x + 3 x 6
1
2
x1 x2 4
x1 0, x2 0
6 3x 2 + 2 x 2 − 3 x + 1 → extr
1
2
1
4
x1 + x2 = 1
7
x12 − x22 → extr
2
x12 + x22 = 4
8
x + y → extr
( x1 − 4) 2 + ( x2 − 3) 2 = 4
x1 − x2 = 4,
0 x1 6, 0 x2 4,
x12 + x22 16
48
2
Домашнє завдання
1. Розв’язати графічним методом наступну задачу
2
2
1
2
f = (x1 − 2) + (x2 − 2) → extr
z ( x, y ) = 2 x 2 + 2 y 2 − x + 3 y + 6 → extr
3x1 + 4 x2 30
− 4 x + 8 у 32;
x1 x2 8
6 x + 2 у = 12.
3
5
7
9
11
f = (x1 − 5) + (x2 − 2) → extr
3 x1 + 2 x2 7
8 x − x 8
1
2
− 9 x1 + 2 x2 6
x1 0, x2 0
2
2
f = (x1 − 4) + (x2 − 4) → extr
3x1 + 4 x2 25
x1 x2 5
x 0, x 0
2
1
4
z = x12 + 4 x22 − 2 x1 + 3x2 → extr ,
8
2
2
6
f = (x1 − 1) + (x2 − 1) → extr
2 x1 + x2 10
− 2 x + 3 x 6
1
2
x1 + 2 x2 4
x1 0, x2 0
2
2
f = (x1 − 1) + (x2 − 1) → extr
2 x1 + x2 10
− 2 x + 3 x 6
1
2
x1 + 2 x2 4
x1 0, x2 0
2
2
z = 9 x12 + x22 + 4 x1 + 36 x2 → extr ,
8 x1 + 5 x2 40;
3 x1 + 9 x2 27;
x j 0, j = 1,2.
z = − x12 − 4 x22 + 12 x1 + 32 x2 → extr 10
4 x1 + 3x2 24;
3x1 + 2 x2 35;
x j 0, j = 1,2.
2 x1 + 3 x2 30;
3x1 + x2 45;
x j 0, j = 1,2.
( x1 − 5) + ( x2 − 5)
f = − ( x1 − 4 ) − ( x2 − 4 ) → extr
2
2
2
2
8
x j 0, j = 1,2
f = ( x1 − 6 ) + ( x2 − 4 ) → extr
2
2
12
f = ( x1 + 2 ) + ( x2 − 6 ) → extr
2
( x1 − 8) + ( x2 − 2)
x1 − x2 4
2
2 x1 − x2 12
2
2
9
x1 4
x1 0, x2 0
13
f = − ( x1 + 1) − ( x2 − 5) → extr
2
( x1 + 3) + ( x2 − 2)
2
2
2
16
x j 0, j = 1,2
15
z = x12 − x22 + 12 x1 + 32 x2 → extr
14
z = − x12 − 2 x22 + 2 x1 + 12 x2 → extr
x1 + 2 x2 8;
2 x1 − x2 12;
x j 0, j = 1,2.
16
z = − x12 − 4 x22 + 12 x1 + 32 x2 → extr
49
−4 x1 + 9 x2 36;
8 x1 + x2 48;
x j 0, j = 1,2.
17 z = − x 2 + 4 x 2 + 12 x + 8x → extr
1
2
1
2
2 x1 + 3 x2 30;
3x1 + x2 45;
x j 0, j = 1,2.
18
2 x1 + 3 x2 18;
3x1 + x2 15;
x j 0, j = 1,2.
19
2
2
2
9
x j 0, j = 1,2
2
2
2
( x1 − 8) + ( x2 − 2)
f = ( x1 − 5) + ( x2 + 4 ) → extr
( x1 − 1) + ( x2 + 2)
f = ( x1 + 2 ) + ( x2 − 6 ) → extr
2
2
20
z = −4 x12 + x22 + 12 x1 − 32 x2 → extr
2 x1 + 3 x2 24;
3x1 + x2 30;
x j 0, j = 1,2.
4
x j 0, j = 1,2
Практичне заняття № 2
Тема: методи одновимірної умовної оптимізації: поділу навпіл (діхотомії),
золотого перетину, Фібоначчі
Задачі для аудиторної роботи
Знайти точки екстремуму і екстремальні значення цільової функції f(x) на
проміжку [a, b] методами половинного поділу, золотого перетину,
Фібоначчі. Точність – 0,01. Для методу Фібоначчі оцінити кількість
ітерацій, яких буде достатньо для обчислення точки екстремуму на
заданому проміжку з вказаною точністю.
1.
2.
F ( x) = 1 + 2 x 2 − x 4 / 4 → max, x −2.8; −1.8
F ( x) = x − ln x + 5 → min
Домашнє завдання
Знайти точки екстремуму і екстремальні значення цільової функції f(x) на
проміжку [a, b] методами половинного поділу, золотого перетину,
Фібоначчі. Точність – 0,0001.
Порядок виконання роботи
1.
2.
3.
4.
Вивчити теоретичний матеріал.
Побудувати блок-схеми алгоритмів дихотомії, Фібоначчі, «золотого перетину».
Вибрати функцию за номером в журналі з таблиці. Задати інтервал [a, b].
Здійснити по 2-3 ітерації пошуку екстремуму заданої функції кожним з
розглянутих методів.
50
Розробити на ЕОМ програму, що реалізовує кожен з розглянутих методів (мова
програмування вибрати самостійно).
Отримати розв'язок задачі трьома методами за допомогою розробленої програми.
Провести порівняльний аналіз результатів
5.
6.
Варианты заданий
№
Функция
Экстремум
1
F ( x) = x 3 − 2 x 2 + x − 1
минимум
2
F ( x) = −3x 2 + 4 x − 2
максимум
3
F ( x) = 2( x − 2) 2 − 1
минимум
4
F ( x) = − x 3 + 3 x 2 − 4
максимум
5
6
7
F ( x) =
x
1 + x2
минимум
F ( x) = −( x + 2) 2 ( x − 1) 2
F ( x) = x +
1
x
максимум
минимум
8
F ( x) = e x − 2 x 2
максимум
9
F ( x) = ( x − 1)3 ( x + 1) 2
минимум
10
F ( x) = −e− x+ x
максимум
11
F ( x) = 2 x −2e3 x
минимум
12
F ( x) = − x 4 + 14 x3 − 60 x 2 + 70 x
максимум
13
14
F ( x) =
2
4 3 2
x
x − sin
3
2
F ( x) = x + arctg 2 x
51
минимум
минимум
15
F ( x) =
16
17
18
12 3 ( x + 2 )
2
x +8
минимум
2
1
F ( x) = x(ln 3x − 1) + cos3x
3
минимум
1
F ( x) = (1.4 x3 − sin 3x) − 2
3
минимум
F ( x) =
4x
x2 + 4
максимум
19
F ( x) = 3 x 5 − 5 x 3
минимум
20
F ( x) = e− x + 1.2 x3
минимум
Теоретический материал
Исследование алгоритмов одномерной оптимизации
Целью работы является изучение и анализ поисковых алгоритмов
минимизации функции одной переменной: дихотомического, Фибоначчи и
«золотого сечения».
Основные теоретические сведения
ВВЕДЕНИЕ
В большинстве методов поисковой оптимизации, используемых в задачах
параметрического синтеза конструкций и технологических процессов,
таких как методы наискорейшего или покоординатного спуска, метод
сопряженных направлений и т.п., на каждом шаге приходится решать задачу
минимизации (максимизации) функции одной переменной. Действительно,
после выбора в исходной точке U k ( k -го шага) направления поиска S k ,
величина шага в этом направлении определяется из условия минимума
(максимума) целевой функции F (U k + S k ) , которая при фиксированных
U k и S k является функцией одной скалярной переменной F ( ) . В
опт
результате решения этой задачи получают значение k и следующий шаг
опт
поиска начинают из точки U k +1 = U k + k S k ) .
52
Процедура нахождения k
представляет собой задачу поисковой
одномерной оптимизации, различные методы одномерного поиска
используют некоторый начальный интервал неопределенности L0 ,
содержащий минимум (максимум) функции F ( ) , который затем
уменьшается до некоторого значения Ln путем вычисления значений
функции в соответствующих точках и отбрасывания заведомо
неоптимальных подынтервалов.
Будем для определенности рассматривать далее так называемые
унимодальные функции F ( ) , т.е. функции, имеющие на заданном
интервале [a, b] единственный минимум. Не нарушая общности, будем
полагать, что F ( ) минимизируется на интервале [a, b] ; максимум функции
находится подобным образом.
ДИХОТОМИЧЕСКИЙ МЕТОД
Этот метод предполагает на каждом шаге вычисление функции в двух
точках (проведение двух экспериментов). При этом с целью максимального
уменьшения интервала неопределенности на каждом шаге указанные точки
выбираются как можно ближе к середине интервала.
опт
Пусть на первом шаге эксперимент проводится в точках 1 = x −
2
и
2 = x + , где x – середина интервала [a, b] , – достаточно малое
2
положительное число (это число модно трактовать как чувствительность
экспериментатора в различении двух близких точек).
F(γ)
ε
γопт
a
2
2
γ1
γ
x γ2
b
Рис.1
Если F ( x − ) F ( x + ) , то с учетом унимодальности и возможности
нахождения минимума в интервале
быть оставлен интервал [ x −
для дальнейшего поиска должен
; b] , в противном случае – [a; x + ] . Таким
2
2
53
образом, если вначале интервал неопределенности L0 равен (b − a) , то
после первого шага (состоящего из двух экспериментов) он равен
1
L2 = (b − a) + .
2
2
Выберем теперь третий и четвертый эксперименты как
пару в середине
оставшегося интервала. После этого интервал неопределенности станет
равным
1
3
L4 = (b − a) + .
4
4
n
Легко понять, что после
экспериментов ( n – четно), произведенных по
тому же правилу, минимум функции опт лежит в интервале
−
n
2
−
n
2
L4 = 2 (b − a) + (1 − 2 ) .
(1)
Из формулы (1) видно, что для уменьшения интервала неопределенности,
например в 100 раз, если пренебречь величиной
, требуется 14
экспериментов.
Словесный алгоритм метода следующий:
Заданы начало a и конец b интервала, точность
.
a+b
Шаг 1. Рассчитывается середина интервала [a, b] , x =
.
2
Шаг 2. Рассчитываются точки 1 = x −
и 2 = x+
и значения в них
2
2
целевой функции f1 = F ( 1 ) и f 2 = F ( 2 ) .
Шаг 3. Если f1 f 2 , то a = 1 , иначе b = 2 .
Шаг 4. Повторять шаги 1-3 до тех пор, пока длина интервала [a, b] больше
2 .
a+b
.
Шаг 5. Результат f
2
МЕТОД ФИБОНАЧЧИ
Этот метод является наиболее быстрым методом поиска, требующим
минимального числа экспериментов. Здесь на каждом шаге, кроме первого,
проводится не два, а один эксперимент. Стратегия поиска состоит в том, что
новая точка поиска располагается внутри интервала неопределенности
симметрично относительно уже находящейся там точки, оставшейся от
предыдущих экспериментов. Для определения требуемого числа
экспериментов n , обеспечивающего точность, а также для выбора
положения двух первых точек поиска, необходимо рассмотреть процесс
поиска в обратном порядке, т.е. с последнего шага.
Рассмотрим ситуацию, которая возникла после того, как все эксперименты,
кроме последнего, уже проведены. Длину изменяющегося интервала
54
неопределенности обозначим Ln−1 . Внутри этого интервала находится
эксперимент с наименьшим из (n − 1) испытаний значением функции F ( )
и внутри него также следует провести последний эксперимент. Очевидно,
что для обеспечения минимального интервала неопределенности Ln после
n экспериментов указанные точки должны быть симметрично
расположены относительно середины интервала Ln−1 и удалены от нее на
расстояние
.
2
Ln-1
Ln
ε
Ln
Рис. 2
Таким образом,
Ln−1 = 2Ln − .
(2)
Рассмотрим далее ситуацию, когда проведены все эксперименты, кроме
двух последних, и длину имеющегося интервала неопределенности
обозначим Ln−2 . Внутри этого интервала находится точка с наименьшим из
(n − 2) испытаний значением F ( ) , и также внутри него необходимо
провести следующий (n − 1) эксперимент. По результатам этого
эксперимента часть интервала Ln−2 должна быть отброшена, а оставшаяся
часть есть Ln−1 . Поскольку заранее не ясно, какая часть будет отброшена,
указанные точки должны располагаться на равных расстояниях от концов
интервала Ln−2 .
Ln-2
Ln-1
Ln-1
Рис.3
55
Но одна из точек внутри интервала Ln−2 останется после (n − 1)
эксперимента и станет точкой внутри интервала Ln−1 . Сочетание
возможных комбинаций рисунков 2 и 3 приводит к схеме разбиения
интервала Ln−2 , изображенных на рис. 4.
Ln-2
Ln-1
Ln
Ln
ε
ε
Ln
Ln
Ln-1
Рис.4
Из рис. 4 следует, что
Ln−2 = Ln−1 + Ln .
Аналогично
Ln−3 = Ln−2 + Ln−1 .
В общем случае
L j −1 = L j + L j +1 ,
Таким образом,
Для
получения
j = 2, n − 1.
(3)
Ln−1 = 2Ln − ,
Ln−2 = Ln−1 + Ln = 2Ln − ,
Ln−3 = Ln−2 + Ln−1 = 5Ln − 2 ,
Ln−4 = Ln−3 + Ln−2 = 8Ln − 3 .
общей
длины интервала Ln−k введем
последовательность чисел Фибоначчи Fk , определяемую следующим
образом:
F0 = F1 = 1 ,
Fk = Fk −1 + Fk −2 , k = 2,3...
(4)
Тогда имеем
Ln−k = Fk +1Ln − Fk −1
(5)
Учитывая, что после первого испытания интервал неопределенности равен
L1 = (b − a) , то полагая
формулы
k = n − 1 , получаем:
Fn Ln − Fn−2 = L1
Отсюда
56
Ln =
Следовательно,
после
L1 Fn−2
+
(6)
Fn
Fn
n
экспериментов начальный
интервал
неопределенности, если пренебречь величиной
, уменьшается в Fn раз.
Для уменьшения интервала неопределенности, например в 100 раз,
требуется 11 экспериментов.
Для того чтобы начать поиск по методу Фибоначчи, необходимо определить
положение первых двух точек проведения испытаний. Эти точки
располагаются
симметрично
внутри
начального
интервала
неопределенности на расстоянии L2 от соответствующих концов этого
интервала. Полагая в выражении (5) k = n − 2 , получаем
L2 = Fn−1Ln − Fn−3 =
Fn−1 L1 Fn−1Fn−2 − Fn Fn−3
Fn−1 L1 (−1) n
=
+
=
+
Fn
Fn
Fn
Fn
Пренебрегая величиной
, имеем
L2 =
Fn−1
L1 .
Fn
(7)
Алгоритм метода следующий:
Заданы начало a и конец b интервала.
Шаг 1. Рассчитывается количество итераций n и формируется массив
чисел Фибоначчи.
Fn−1
Fn−1
=
a
+
L
=
b
−
L и
Шаг 2. Рассчитываются две точки 1
и 2
Fn
Fn
значения в них целевой функции f1 = F ( 1 ) и f 2 = F ( 2 ) , где L = (b − a) –
длина интервала [a, b] .
Шаг 3. Если f1 f 2 , то b = 1 , f1 = f 2 , 1 = 2 , L = (b − a)
и рассчитывается одна новая точка
Fn−2
L = a + (b − 1 ) , f 2 = F ( 2 ) ,
Fn−1
иначе a = 2 , f 2 = f1 , 2 = 1 , L = (b − a)
2 =b−
и рассчитывается одна новая точка
1 = a +
Шаг 4. n = n − 1 .
Fn−2
L = b − ( 2 − a) , f1 = F ( 1 ) .
Fn−1
Шаг 5. Повторять шаги 1-3 до тех пор, пока
Шаг 6. Результат min ( f1 ; f 2 ) .
57
n 2.
МЕТОД «ЗОЛОТОГО СЕЧЕНИЯ»
Для начала поиска по методу Фибоначчи необходимо предварительно
задаться числом экспериментов n исходя из допустимого значения
интервала неопределенности в конце поиска. От этого недостатка свободен
метод «золотого сечения», который почти столь же эффективен, как и метод
Фибоначчи. Здесь так же, как и в последнем методе, точка, выбираемая
внутри интервала неопределенности для проведения эксперимента на
очередном шаге, располагается симметрично относительно уже
находящейся там точки, оставшейся от предыдущих экспериментов.
Поэтому здесь для трех соседних интервалов неопределенности также
справедливо соотношение (3). Однако в методе «золотого сечения» не
используется соотношение (2), которое зависит от n . Вместо этого
выдерживается постоянным, равным , отношение длин последовательных
интервалов, т.е.
L j −1
Lj
=
Lj
L j +1
= .
(8)
L j +1 и приняв во внимание, что согласно (8)
Разделив (3) на
L j −1
= 2 , имеем 2 = + 1,
(9)
(1 + 5 )
1,618033989 .
2
(10)
L j +1
откуда
=
Тогда
L j −1
L j +1
= 2 ;
L j −2
L j +1
= 3 и т.д.
Следовательно,
L
L1
= n−1 , т.е Ln = n 1−1
Ln
(11)
Таким образом, в методе «золотого сечения» начальный отрезок делится по
«правилу золотого сечения» (8), (10) и первые два эксперимента
располагаются симметрично на расстоянии 0,618 от соответствующих
концов интервала. По результатам этих двух экспериментов сохраняется
один из интервалов, в котором расположен оставшийся эксперимент.
Симметрично ему располагается следующий эксперимент и т.д.
Можно показать, что окончательный интервал неопределенности в данном
методе при достаточно больших n всего лишь на 17% больше, чем в методе
Фибоначчи. Можно показать также, что при больших n оба метода
начинаются практически из одной и той же точки.
Алгоритм метода следующий:
58
Заданы начало a и конец
b
интервала, точность , = 0,618 .
Шаг 1. Рассчитываются две точки 1 = a + L и 2 = b − L и значения в них
целевой функции f1 = F ( 1 ) и f 2 = F ( 2 ) , где L = (b − a) – длина интервала
[ a, b] .
Шаг 2. Если f1 f 2 , то
b = 1 , f1 = f 2 , 1 = 2 , L = (b − a)
и рассчитывается одна новая точка
2 = b − L = a + (b − 1 ) , f 2 = F ( 2 ) ,
иначе
a = 2 , f 2 = f1 , 2 = 1 , L = (b − a)
и рассчитывается одна новая точка
1 = a + L = b − ( 2 − a) , f1 = F ( 1 ) .
.
Шаг 3. Повторять шаги 1-2 до тех пор, пока длина интервала [a, b] больше
.
Шаг 6. Результат min ( f1 ; f 2 ) .
Контрольні питання
1. Що таке оптимізація?
2. Що прийнято розуміти під кількісною оцінкою оптимизируемого якості?
3. Які типи завдань оптимізації існують?
4. В чому полягає безумовна задача оптимізації?
5. У чому полягає умовна задача оптимізації?
6. У якому випадку використовується одномірна оптимізація?
7. У чому полягає основне завдання одномірної оптимізації?
8. Дайте порівняльну характеристику методів одновимірної оптимізації.
9. Місце завдання одновимірного пошуку в загальному завданню оптимізації.
10. Сутність методів дихотомічного поділу, Фібоначчі, «золотого перетину».
11. Порівняльні характеристики досліджуваних алгоритмів.
Практичне заняття № 3
Тема: Минимизация функции многих переменных прямыми методами. Методи
нульового порядку.
Цель работы: знакомство с задачей минимизации функции многих переменных
методами, не требующими вычисления градиента функции. К ним относятся метод
покоординатного спуска, метод деформированного многогранника.
Введение. Данная задача формулируется как задача безусловной оптимизации, сутью
которой является поиск минимума функции многих переменных на всем пространстве
соответствующей размерности. Функцию многих переменных
59
f ( X ) = f ( x1 , x2 ,..., xn )
будем рассматривать как функцию, заданную в точках X n-мерного эвклидова
пространства En.
Рассмотрим основные методы решения задач безусловной минимизации вида:
n
(1.1.)
min f ( X ), где X E
Если функция f ( X ) дважды дифференцируема, то данную задачу можно решить
аналитически, используя необходимые и достаточные условия безусловного экстремума.
Записав необходимые условия:
f ' ( X ) = 0 или
f ( X )
= 0, i = 1,..., n
xi
(1.2)
находим все стационарные точки функции f ( X ) . Среди них, используя достаточные
условия, находим точки локального минимума, в которых матрица вторых производных
f " ( X ) положительно определена. Сравнивая значения в этих точках, находим точку
глобально минимума.
Однако аналитически решить систему уравнений (1.2) не всегда возможно. Кроме того,
функция f ( X ) может быть не только недифференцируемой, но даже не аналитически
заданной. Поэтому аналитический метод имеет ограниченное применение и для решения
задачи (1.1) на практике чаще используют приближенные численные методы.
Простейшие из них, называемые прямыми методами, не требуют вычисления
производных функций f ( X ) , а используют только вычисленное значение функции f ( X )
.
В этих методах, после задания начальной точки X (0) последовательно ищутся точки
X (1) , X (2) ,..., X ( k ) такие, чтобы выполнялось неравенство вида:
f ( X (0) ) f ( X (1) ) ... f ( X ( k ) )
Новая точка X
( k +1)
X
(1.3)
ищется с помощью итерационной процедуры вида:
( k +1)
= f ( X (0) , X (1) ,..., X ( k ) )
(1.4),
в которой выбор нового приближения к точке минимума определяется сравнением
значений функции f ( X ) в нескольких точках пространства En.
1. Постановка задачи.
Дана функция y=f(X) . Требуется найти минимум функции, используя метод
покоординатного спуска или метод деформированного многогранника.
2. Метод покоординатного спуска.
При оптимизации по данному методу траектория поиска экстремума функции f ( X )
выбирается в виде ломаной линии, отдельные отрезки которой параллельны
координатным осям пространства оптимизируемых параметров X E n .
В случае n=2 можно на примере линий равного уровня, то есть геометрического места
точек, в которых соблюдается условие f ( X ) = const , показать данную траекторию.
Опишем данный метод.
После
выбора
некоторого
начального
приближения
min f ( X ) = f ( X ) при фиксированных значениях
x1
X 0 = ( x10 , x20 ,..., xn0 ) ищется
x20 , x30 ,..., xn0 . Таким образом, движение
OX 1 в сторону убывания
min f ( X ) = X1(1) . Затем поиск идет вдоль оси OX 2 из точки с
из точки X 0 происходит по прямой, параллельной оси
функции
f (X )
x1
координатами
(1)
1
( x , x20 ,..., xn0 ) , то есть ищется min f ( X ) . Описанная процедура
x
2
последовательно повторяется для всех
xi , i = 1,.., n .
60
По завершению поиска по всем xi получаем точку X = ( x1 , x2 ,..., xn ) . Процесс поиска
повторяется аналогично вышеизложенному, и в результате имеем точку
1
1
1
1
X 2 = ( x12 , x22 ,..., xn2 ) и так далее. Итерационный процесс поиска заканчивается, когда
изменение аргумента X мало влияет на изменение функции f ( X ) , то есть выполняется
следующее неравенство вида:
(1.5),
f ( X k +1 ) − f ( X k )
где -заданная точность вычислений.
X(2)
X(1)
X(0)
Рис. 1
Примечание. При поиске минимума функции f ( X ) по направлению вдоль оси
i = 1,.., n переход от начальной точки
OX i ,
X i j к точке X i j +1 происходит в соответствии с
формулой:
X i j +1 = X i j + sign
где параметр sign может принимать значение 1 или -1, а
направлении. При отыскании min f ( X ) коэффициент
(1.6),
-величина шага в данном
меняется от начального
xi
значения
0 до минимально возможного min .
3. Алгоритм метода покоординатного спуска.
1. Задается точность вычисления , начальный шаг
допустимый шаг
0 , минимально
min , точка начального приближения
номер итерации k=0 и вычисляется
X 0 E n , порядковый
f (X k ) .
2. Запоминаем f ( X ); k = k + 1, i = 0 .
3. Начинаем поиск параллельно оси Охi : i = i + 1 ,если i n , переходим к п. 11 ,
иначе к п. 4.
k
4. Задаем шаг = 0 .
5. Задаем знак sign = 1 .
6. Вычисляем X i
новой точке.
j +1
в соответствии с формулой (1.6) и значение функции в
61
j
7. Если новое значение функции меньше предыдущего, то принимаем X i как
X i j +1 , f ( X j ) запоминаем как f ( X j +1 ) и возвращаемся к п. 6, иначе меняем
знак sign на противоположный.
8. Если знак sign 0 ,то переходим к п. 6, иначе к п. 9.
9.
Уменьшим величину шага
10. Если текущий шаг
,( j +1 = 0.1 j ) .
min , то переходим к п. 3, иначе к п. 5.
11. Проверка условия достижения заданной точности: f ( X ( k +1) − f ( X ( k ) )) и
если оно выполняется, то переходим к п. 12, иначе к п. 2.
12. Завершить вычисления, приняв за точку минимума X * последнее значение
Хk, min
f ( X ) = f ( X * ).
4. Метод деформируемого многогранника (метод Нелдера — Мида).
Метод Нелдера — Мида, также известный как метод деформируемого многогранника и
симплекс-метод, — метод безусловной оптимизации функции от нескольких
переменных, не использующий градиентов функции, а поэтому легко применим к
негладким и/или зашумлённым функциям.
В методе Нелдера и Мида минимизируется функция n независимых переменных с
использованием n+1 вершин деформируемого многогранника в En. Каждая вершина
может быть идентифицирована вектором x. Вершина (точка) в En, в которой значение
f(x) максимально, проектируется через центр тяжести (центроид) оставшихся вершин.
Улучшенные (более низкие) значения целевой функции находятся последовательной
заменой точки с максимальным значением f(x) на более «хорошие точки», пока не будет
найден минимум f(x).
Суть метода заключается в последовательном перемещении и деформировании
симплекса вокруг точки экстремума. Предполагается, что серьёзных ограничений на
область определения функции нет, то есть функция определена во всех встречающихся
точках.
Параметрами метода являются:
• коэффициент отражения α > 0, обычно выбирается равным 1.
• коэффициент сжатия β > 0, обычно выбирается равным 0,5.
• коэффициент растяжения γ > 0, обычно выбирается равным 2.
5. Алгоритм метода.
T
(k)
(k)
(k)
(k)
Пусть xi = xi1 ,, xij ,, xin , i = 1,, n + 1 , является i-й вершиной (точкой) в
En на k-м этапе поиска, k=0, 1, …, и пусть значение целевой функции в x(k)i равно f(x(k)i).
Кроме того, отметим те векторы x многогранника, которые дают максимальное и
минимальное значения f(x).
Определим
f ( x(hk ) ) = max f ( x1( k ) ), , f ( x(nk+)1 ) ,
где x(hk ) = x(i k ) , и
(k)
(k)
f ( x(k)
l ) = min f ( x1 ), , f ( x n+1 ) ,
(k)
n
где x(k)
l = x i . Поскольку многогранник в E состоит из (n+1) вершин x1, …,xn+1, пусть
xn+2 будет центром тяжести всех вершин, исключая xh.
62
Тогда координаты этого центра определяются формулой
x
1 n +1 ( k )
= x ij − x (hjk ) ,
n i =1
(k)
n+2, j
j = 1, , n,
(1.7)
где индекс j обозначает координатное направление.
Начальный многогранник обычно выбирается в виде регулярного симплекса (но
это не обязательно) с точкой 1 в качестве начала координат; можно начало координат
поместить в центр тяжести. Процедура отыскания вершины в En, в которой f(x) имеет
лучшее значение, состоит из следующих операций:
1. Отражение – проектирование
соотношением
xh( k ) через центр тяжести в соответствии с
k)
x(n+3
= x(nk+)2 + ( x(nk+)2 − x(hk ) ),
(1.8)
где >0 является коэффициентом отражения;
x
(k)
n +2
– центр тяжести, вычисляемый по
(k)
формуле (1); x h – вершина, в которой функция f(x) принимает наибольшее из n+1
значений на k-м этапе.
(
) ( )
2. Растяжение. Эта операция заключается в следующем: если f x(nk+)3 f x(l k ) , то вектор
(x
(k)
n+3
− x(nk+)2 )
растягивается
x(nk+)4 = x(nk+)2 + ( x(nk+)3 − x(nk+)2 ),
в
соответствии
с
соотношением
(1.9)
(
) ( )
где >1 представляет собой коэффициент растяжения. Если f x(nk+)4 f x(l k ) , то
x (hk )
x (nk+4) и процедура продолжается снова с операции 1 при k=k+1. В
(k)
(k)
противном случае x h заменяется на x n +3 и также осуществляется переход к операции
заменяется на
1 при k=k+1.
(
) ( )
(
)
3. Сжатие. Если f x(nk+)3 f x(i k ) для всех ih, то вектор x(hk ) − x(nk+2) сжимается в
соответствии с формулой
x(nk+)5 = x(nk+)2 + ( x(hk ) − x(nk+)2 ),
(1.10)
(k)
где 0<<1 представляет собой коэффициент сжатия. Затем x h заменяем на
возвращаемся к операции 1 для продолжения поиска на (k+1)-м шаге.
(
) ( )
с
отсчётом
(
x (nk+5) и
)
4. Редукция. Если f x(nk+)3 f x(hk ) , все векторы x(i k ) − x(l k ) , i = 1, , n +1, уменьшаются
в
2
раза
x (l k )
от
в
соответствии
с
формулой
(k)
x(k)
+ 0,5( x(i k ) − x(l k ) ), i = 1, , n +1.
(1.11)
i = xl
Затем возвращаемся к операции 1 для продолжения поиска на (k+1)-м шаге.
Критерий окончания поиска, использованный Нелдером и Мидом, состоял в
проверке условия
1
2
2
1 n+1
(k)
(k)
f ( x i ) − f ( x n + 2 ) ,
n +1 i =1
(1.12)
( )
где – произвольное малое число, а f x (nk+2) – значение целевой функции в центре тяжести
x (nk+2) .
На рис.2 приведена блок-схема поиска методом деформируемого многогранника
63
Пуск
Вычислить начальные значения
xi(0), i = 1, 2, …, n+1, и f(x(0))
начального симплекса
Вычислить xh и xl и c
Отражение: вычислить
xn+3 = xn+2 + (xn+2 - xn)
Вычислить
f(xn+3)
Выполняется ли
неравенство
f(xn+3) < f(xh) ?
Выполняется ли
неравенство f(xn+3) < f(xi)
для всех i h ?
Нет
Да
Да
Выполняется ли
неравенство
f(xn+3) < f(xh) ?
Нет
Да
Растяжение: вычислить
xn+4 = xn+2 + (xn+3 - xn+2)
Заменить
xh на xn+3
Нет
Сжатие: вычислить
xn+5 = xn+2 + (xh - xn+2)
Вычислить f(xn+4)
Выполняется ли
неравенство
f(xn+4) < f(xl) ?
Заменить
xh на xn+3
Нет
Вычислить f(xn+5)
Выполняется ли
неравенство
f(xn+5) > f(xh) ?
Да
Заменить
xh на xn+4
Нет
Да
Заменить
xh на xn+5
Редукция: заменить
все xi на xl + 1/2(xi - xl)
Нет
2
1
f ( xi ) − f ( x n+2 )
n
Рис. 2
1
2
?
Да
Останов
Задание
Используя метод покоординатного спуска или метод деформированного многогранника,
реализовав их в виде программ в любой среде, найти минимум следующих функций:
1) f(X)=x12+ x22 + x1–x1 *x2-2x2
2) f(X)= ( x2 –x12) 2+ 100 (1-x1)2
3) f(X)=25( x2 –x12) 2+ (4-x1*x2)2
4) f(X)=5x12+ x22 + 4x1 *x2-16x1-12x2
5) f(X= х12 + 4х22 –4х1 –8х2 + 5
6) f(X)= 4x12+ x22 +8x1–x1 *x2-12x2
7) f(X)=81( x2 +x12) 2+ (12-x1)2
8) f(X)=( 3x2 –2x12) 2+ 4 (2-x1*x2)2
9) f(X)=25x12+ 9x22 + 4x1 *x2-16x1-12x2
10) f(X= 16х12 + 4х22 –42х1 –18х2 + 25
11) f(X)=x12+ x22 +x32+ x1–x1 *x2-2x3
12) f(X)=4( x2 –x12) 2+ 64 (1-x1)2
13) f(X)=( x2 –x12) 2+49(1-x1*x2)2
14) f(X)=5x12+ x22 + 4x1 *x2-28x1+32x2
15) f(X= х12 + 14х22 –4х1 –8х2 + 5
16) f(X)=3x12+ x22 +x32+7x1–x1 *x2-2x3
17) f(X)=100( x2 –x12) 2+ (6-x2)2
18) f(X)=( x2 –x12) 2+ (1-x1*x2)2
19) f(X)=25x12+ 64x22 +14x1 *x2-160x1-32x2
20) f(X= 9х12 + 4х22 –4х1 –28х2 + 25
21) f(X)= x12+16 x22 + 4 x1–x1 *x2-24x2
22) f(X)=100( x2 –x12) 2+ (4+x1)2
23) f(X)=( x2 –x12) 2+ 36 (2-x1*x2)2
24) f(X)=5x12+ 4x22 - x1 *x2+16x1-12x2
25) f(X= 33х12 + 4х22 –24х1 –28х2 + 17
26) f(X)=9x12+ x22 +4x32+ x1–x1 *x2-8x3
27) f(X)=49 ( x2 +x12) 2+ (1-x1)2
28) f(X)= 25( x2 –x12) 2 +4 (1-x1*x2)2
29) f(X)=5x12+ x22 + 4x1 *x2-16x1-12x2
30) f(X= х12 + 4х22 –4х1 –8х2 + 5
31) f(X)=x12+ x22 +x32+ x1–x1 *x2-2x3
32) f(X)=100( x2 –x12) 2+ (1-x1)2
65
33) f(X)=( x2 –x12) 2+ (6-x2)2
34) f(X)=5x12+ x22 + 4x1 *x2-16x1-12x2
35) f(X= х12 + 4х22 –54х1 –28х2 + 512
36) f(X)=9x12+ x22 +x32+21 x1–x1 *x2-27x3
37) f(X)=10( x2 –x12) 2+ (8-x1)2
38) f(X)=4 ( x2 –x12) 2+ (9-x1*x2)2
39) f(X)=5x12+ x22 + 4x1 *x2-16x1-12x2
40) f(X= х12 + 49х22 –14х1 –18х2 + 15
Практичне заняття № 4
Тема: градієнтні методи безумовної оптимізації.
1. Градиентные методы решения задач безусловной оптимизации
Ведущее место среди прямых методов решения экстремальных задач
занимает градиентный метод (точнее, семейство градиентных методов)
поиска стационарных точек дифференцируемой функции f ( x ) . Напомним, что
стационарной называется точка, в которой f ( x ) = 0 и которая, в соответствии
с необходимым условием оптимальности, является «подозрительной» на
наличие локального экстремума. Таким образом, применяя градиентный
метод, находят множество точек локальных минимумов (или максимумов),
среди которых определяется минимум (или максимум) глобальный.
Идея данного метода основана на том, что градиент функции указывает
направление ее наиболее быстрого возрастания в окрестности той точки, в
которой он вычислен. Поэтому, если из некоторой текущей точки x( )
перемещаться в направлении вектора f ( x ) = 0 , то функция f будет возрастать,
по крайней мере, в некоторой окрестности x( ) . Следовательно, для точки
x( 2) = x(1) + f ( x(1) ) ,
( 0 ) , лежащей в такой окрестности, справедливо
1
1
неравенство f ( x(1) ) f ( x( 2) ) (см. рис. 10.1).
Рис. 1. Направление подъема в точке
66
x( )
1
Рассмотрим задачу
f ( x ) → minn .
xR
Как только определяется направление движения, сразу же встает вопрос о
том, как далеко следует двигаться в этом направлении. Другими словами,
возникает проблема выбора шага в рекуррентной формуле
( 8)
x( q +1) = x( q ) − f ( x( q ) ) ,
задающей последовательность точек, стремящихся к точке минимума целевой
функции. В зависимости от способа ее решения различают различные
варианты градиентного метода. Наиболее известным из них является метод
наискорейшего спуска.
Пусть f ( x) = f ( x1 , x2 ,..., xn ) – дифференцируемая функция, заданная на R n , а
x( q ) = ( x1( q ) , x2( q ) ,..., xn( q ) ) – некоторая текущая точка. Заметим, что каких-либо общих
рекомендаций, касающихся выбора исходной точки (или, как еще говорят,
начального приближения) x( ) , не существует. По возможности, она должна
находиться близко от искомого оптимального плана x* . Если x( ) –
нестационарная точка (т. е. f ( x( q) ) 0 ), то при движении в направлении
0
q
антиградиента – f ( x( q) ) функция
f ( x)
на некотором промежутке обязательно
будет убывать. Отсюда возникает естественная идея такого выбора шага,
чтобы движение в указанном направлении продолжалось до тех пор, пока
возрастание не прекратится. Для этого выразим зависимость значения f ( x) от
шагового множителя > 0 , полагая x = x(q) − f ( x( q) ) :
(
( ) )) = ( ) ,
f ( x ) = f x( ) − f x(
или, в координатной форме,
q
( )
q
( 9)
( ) .
q
q
f x( )
f x( )
(q)
(q)
( ) = f x1 −
,..., xn −
x1
xn
( 10)
Чтобы добиться наибольшего из возможных значений f ( x) при движении
по направлению – f ( x( q) ) , нужно выбрать такое значение , которое
минимизирует функцию
( )
( ( ) = min ( )) .
0
Для вычисления
воспользоваться необходимым условием экстремума:
что если для любого >0
( )
d / d 0 ,
( )
,
d / d = 0 .
можно
Заметим,
то функция f(x) не ограничена снизу (т.
е. не имеет минимума). В противном случае, на основе ( 10) получаем
f ( x ) dxn
d f ( x ) dx1
=
+ ... +
d
x1
d
xn
d
что, в свою очередь, дает
67
,
( 11)
f ( x ) f ( x( q ) )
d f ( x ) f ( x( q ) )
=
+ ... +
= f ( x ) f ( x( q ) ) .
d
x1
x1
xn
xn
( 12)
Если считать, что следующая точка x( ) соответствует оптимальному
значению = , то в ней должно выполняться условие d ( ) / d = 0 , и следует
q +1
находить из условия
(
( ) )) f ( x( ) ) = 0 .
f x( ) − f x(
q
q
( 13)
q
Условие ( 13) означает равенство нулю скалярного произведения
градиентов функции f точках x( ) и x( ) . Геометрически оно может быть
интерпретировано как перпендикулярность векторов градиентов функции f в
указанных точках, что и показано на рис. 10.2. В точке x( ) вектор – f ( x(q +1) ) ,
q +1
q
q +1
будучи антиградиентом, перпендикулярен линии уровня, проходящей через
данную точку, а вектор – f ( x(q) ) является касательным к этой линии.
Рис. 10.2. Геометрическая интерпретация метода
наискорейшего спуска
И таким образом, движение в направлении антиградиента
( )
−f x( q )
следует
продолжать до тех пор, пока он пересекает линии уровня оптимизируемой
функции. После того, как точка x( ) найдена, она становится текущей для
очередной итерации. На практике признаком достижения стационарной точки
служит достаточно малое изменение координат точек, рассматриваемых на
последовательных итерациях. Одновременно с этим координаты вектора
f ( x( q ) ) должны быть близки к нулю.
q +1
Метод дробления шага
Для нахождения шага , в методе наискорейшего спуска требуется
решить уравнение ( 13), которое может оказаться достаточно сложным.
Поэтому часто ограничиваются «подбором» такого значения , что ( ) ( 0) .
68
Для этого задаются некоторым начальным значением 1 (например, 1 =1) и
проверяют условие ( 1 ) ( 0) . Если оно не выполняется, то полагают
2 = 1 ,
где 0 1 – параметр метода, называемый коэффициентом дробления, и т. д.
до тех пор, пока не удается найти подходящий шаг, с которым переходят к
следующей точке х(q+1). Критерий завершения алгоритма, очевидно, будет
таким же, как и в методе наискорейшего спуска.
Для тех, кто хочет знать больше
2. Специальные классы негладких функций. Источники,
порождающие задачи негладкой оптимизации
Рассмотрим такие специальные классы недифференцируемых функций,
которые, с одной стороны, являются не слишком широкими обобщениями
класса непрерывно дифференцируемых функций в том смысле, что для
функций этих классов можно достаточно разумно определить обобщенное
понятие градиента и использовать его для построения процессов
градиентного типа нахождения экстремума. С другой стороны, введенные
специальные классы функций охватывают и функции, встречающиеся в
большинстве практических приложений, где речь идет о непрерывных
функциях, определенных на n-мерном евклидовом пространстве.
2.1. Понятие субградиента выпуклой функции. Некоторые способы
вычисления субградиента
Пусть f ( x) – выпуклая функция, определенная на множестве M E , X * –
множество минимумов (оно может быть и пустым), x* X * – точка минимума;
inf f ( x) = f ; x – внутренняя точка области определения M .
Определение. Субградиентом (обобщенным градиентом) g ( x )
функции f в точке x int M называется вектор g ( x ) такой, что
f ( x) − f ( x ) ( g ( x ), x − x ) для всех x M .
Из определения субградиента следует, что если f ( x) f ( x ) , то
(10.2.1)
(− g ( x ), x − x ) 0.
Множество обобщенных градиентов (субградиентное множество)
выпуклой функции f ( x) в точке x обозначим G ( x ) . Для любой внутренней
точки x области определения M множество G ( x ) не пустое, ограниченное,
выпуклое и замкнутое (доказательство см. в [103]).
n
*
f
f
f
f
f
f
69
Для того чтобы внутренняя точка области определения f ( x) x* M была
точкой минимума, необходимо и достаточно, чтобы G ( x ) содержало точку 0.
Геометрически формула (10.2.1) означает, что антисубградиент в точке x
образует острый угол с произвольным направлением, проведенным из x в
сторону точки x с меньшим значением f ( x) . Отсюда, если X * непусто, x X * , то
при движении из x в направлении − g ( x ) с достаточно малым шагом
расстояние до X * убывает. Этот простой факт лежит в основе субградиентного
метода или метода обобщенного градиентного спуска (ОГС).
Известны следующие основные источники, порождающие задачи
негладкой оптимизации.
1. Задачи математического программирования большой размерности с
блочной структурой и сравнительно небольшим числом связей между
блоками. Использование схем декомпозиции для решения таких задач
приводит к задачам минимизации (максимизации), как правило, негладких
функций от связывающих переменных или от множителей Лагранжа
(двойственных оценок), соответствующих связывающим ограничениям.
2. Задачи минимизации функции максимума. Пусть задано
параметрическое семейство выпуклых функций, определенных на всем
пространстве E n , { f ( x)} . Одним из источников получения негладких функций
в выпуклом программировании является операция взятия поточечного
максимума по параметру , т.е. построение функции максимума:
*
f
f
F ( x) = sup f ( x).
A
Область определения функции F ( x) ( domF ) совпадает с такими значениями
x E n , при которых { f ( x)} ограничена сверху по . Для каждого x dom F
определим подмножество индексов
I ( x ) = { A : f ( x ) = F ( x )}
Субградиентное множество
формулой
GF ( x )
функции F в точке x определяется
GF ( x ) = conv
I ( x )
G f ( x ) ,
(10.2.2)
где conv {M } обозначает операцию нахождения минимального выпуклого
замкнутого множества, содержащего M , G ( x ) – субградиентные
f
подмножества функций f в точке x , I ( x ) . В случае, когда I ( x ) – конечное
множество, все крайние точки множества G ( x ) являются субградиентами
некоторых функций f , I ( x ) , в точке x , и G ( x ) представляет собой выпуклый
многогранник соответствующей размерности.
3. Лагранжевы оценки в задачах математического программирования.
Рассмотрим достаточно общую задачу математического программирования,
F
F
70
ограничения которой разбиты на две группы, одни из которых имеют вид
условия принадлежности x X E , а другие составляют систему равенств:
найти
f * = inf f ( x), X E n ,
(10.2.3)
xX
n
при ограничениях
(10.2.4)
Предположим, что X – замкнутое подмножество n -мерного евклидового
пространства, g ( x) – непрерывные функции, определенные на X .
Для оценки f введем функцию Лагранжа
gi ( x) = 0, i = 1,
, m.
i
*
m
L( x, u ) = f ( x) + ui gi ( x),
i =1
где
u = {u1 ,
, um }
– вектор множителей Лагранжа. Рассмотрим оценку
(u) = inf L( x, u).
xX
При любом допустимом x и произвольном u имеем (u) f ( x) , откуда
следует что (u) f .
Задача нахождения наилучшей оценки для оптимального значения задачи
(10.2.3), (10.2.4) в данном классе лагранжевых оценок сводится к решению
координирующей задачи: найти
*
* = sup (u).
uRm
Функция (u) является вогнутой как результат операции минимизации по
x X параметрического ( u – параметр) семейства линейных по u функций.
Предположим, что (u) – собственная вогнутая функция с непустой областью
dom , имеющей внутренние точки. Пусть x – некоторая внутренняя точка dom
, т.е. x int dom .
Тогда по правилам вычисления субградиента от функции максимума
(u) = − (u) субградиентное множество G (u ) определяется следующим образом:
G (u ) = conv
где
X (u)
xX ( u )
G( x(u )) ,
L( x, u ) ;
– множество всевозможных решений локальной задачи inf
xX
G( x(u ))
– вектор “невязок”, соответствующий решению x(u ) , G( x(u )) = {g ( x(u )), , g ( x(u ))} .
Таким образом, если в точке x локальная задача имеет неединственное
решение, то градиент функции (u) в соответствующей точке терпит разрыв.
4. Задачи минимизации функции максимума, характерные для моделей
игрового характера, "многокритериальных" моделей оптимального
планирования и исследования операций. К таким задачам сводятся задачи
решения систем уравнений и неравенств, определения коэффициентов
нелинейной регрессии, когда в качестве критерия используется чебышевский
критерий минимизации максимума невязки (модуля невязки).
1
71
m
5. Задачи нелинейного программирования, для решения которых
используется метод негладких штрафных функций. Негладкие штрафные
функции определенного вида (см. далее) обладают несомненным
преимуществом по сравнению с обычно применяемыми гладкими функциями
штрафа: при использовании негладких штрафных функций нет
необходимости устремлять штрафные коэффициенты к + .
6. Задачи оптимального управления с непрерывным и дискретным
временем. Использование принципа максимума Понтрягина или дискретного
принципа максимума во многих случаях приводит к задачам минимизации
функций с разрывным градиентом. Эти задачи можно рассматривать как
специальные задачи нелинейного программирования, для решения которых
применимы схемы декомпозиции или метод негладких штрафных функций.
7. Задачи дискретного программирования или задачи смешанного
дискретно-непрерывного типа. Многие задачи такого рода достаточно
успешно могут решаться с использованием метода ветвей и границ с
получением оценок путем решения двойственной задачи. Двойственная задача
обычно оказывается задачей минимизации выпуклой кусочно-линейной
функции с огромным числом "кусков" при простых ограничениях, т. е. задачей
негладкой оптимизации.
8. Функции с разрывным градиентом как результат кусочно-гладкой
аппроксимации технико-экономических характеристик реальных
объектов могут непосредственно входить в модель задачи оптимального
планирования, проектирования или исследования операций.
Следует также отметить, что с прикладной точки зрения нет резкой
границы между негладкими и гладкими функциями: функция с очень быстро
меняющимся градиентом близка по своим свойствам к негладкой функции.
Поэтому вычислительные методы, разработанные для решения задач
негладкой оптимизации, оказываются эффективными и для оптимизации
"плохих" гладких функций (функций овражного типа).
Обобщенный градиентный спуск
Методом обобщенного градиентного спуска (ОГС) или субградиентным
методом
называется
процедура
построения
минимизирующей
последовательности {x } , а ее элемент x по следующему правилу:
k k =0
k
xk +1 = xk − hk
где
f ( x)
g f ( xk )
g f ( xk )
, k = 0,1, 2, ;
(10.2.5)
– начальное приближение; g ( x ) – произвольный субградиент функции
в точке x , h 0 – шаговый множитель. Если g ( x ) = 0 , то x – точка
x0
f
k
k
k
минимума функции
f
f ( x) ,
k*
и процесс (10.2.5) останавливается.
72
k*
Конкретный вариант метода ОГС типа (10.2.5) определяется процедурой
выбора величины шага h . Среди известных способов определения h можно
выделить следующие:
k
k
h0
, h0 0, k = 0,1, 2,...;
k +1
h
= k , h0 0, k = 0,1, 2,...;
k +1
1)
hk +1 =
2)
hk +1
3)
hk +1 =
hk + hk −1
h
, h0 0, h1 = 0 , k = 0,1, 2,...
2
2
Наиболее общий результат о сходимости субградиентного метода связан с
классическими условиями регулировки шага и содержится в следующей
теореме.
Теорема 1.5. Пусть f ( x) – выпуклая функция, определенная на E , с
ограниченной областью минимумов X * , {h } (k = 0,1, 2, ) – последовательность
чисел, обладающая свойствами:
n
k
hk 0; lim hk = 0;
k →
h
k =0
k
= +.
Тогда последовательность {x } (k = 1, 2, ) , образованная по формуле
(10.2.5), при произвольном x E обладает одним из следующих свойств: либо
min xk − y = 0 , lim f ( xk ) = min f ( x) = f * .
найдется такое k = k , что x X , либо klim
→ yX
k →
yE
k
0
n
*
k
*
n
Имеется несколько вариантов доказательства теоремы 1.5 и ее аналога для
ОГС без нормировки субградиента:
xk +1 = xk − hk g f ( xk ),
k = 0,1, 2,
Все они основаны на изучении поведения последовательности
k = min xk − x .
xX
{k }k =0 ,
где
*
Лемма Пусть в субградиентном методе (10.2.5) используется регулировка
шага h = h, h 0, для всех k = 0,1, 2,... Тогда для любого 0 и x* X * найдутся такие
k = k * и x E , что будет выполняться свойство
k
n
f ( x ) = f ( xk* )
, причем
h
x − x* (1 + ) .
2
Лемма 1.1 гарантирует уменьшение расстояния до точек области
минимумов только в случае достаточно большого расстояния от множества
минимумов до точек x . Однако с помощью этой леммы можно обосновать
сходимость субградиентного метода при дополнительных предположениях о
свойствах минимизируемой функции. Так, например, если множество точек
минимума содержит сферу радиуса r h / 2 , то субградиентный метод с
постоянным шагом h гарантирует нахождение такого k * , что xk X * .
k
*
При определенных дополнительных предположениях некоторые варианты
ОГС сходятся со скоростью геометрической прогрессии.
73
Теорема 1.6. Пусть f ( x) – выпуклая функция, определенная на
x E при некотором (0 / 2) выполняется неравенство
En , и для всех
n
( g f ( x), x − x* ( x)) cos g f ( x) x − x* ( x) ,
(10.2.6)
где x ( x) – точка, принадлежащая множеству минимумов функции f ( x) и
лежащая на кратчайшем расстоянии от x . Тогда, если при заданном x
выбрать величину h , удовлетворяющую неравенству
*
0
0
x* ( x0 ) − x0 cos ,
/ 4 / 2,
h0
*
x ( x0 ) − x0 /(2cos ), 0 / 4,
определить
{hk }k = 0
в соответствии с рекуррентной формулой
hk +1 = hk r ( ), k = 0,1, 2,
,
где
/ 4 / 2,
sin ,
r ( ) =
1/(2cos ), 0 / 4,
и вычислить
g (x ) = 0 и x
f
k*
по формуле (10.2.5), то либо при некотором индексе k *
принадлежит области минимумов, либо при всех k = 0,1, 2,
{xk }k =1
k*
выполняется неравенство
/ 4 / 2,
h / cos ,
xk − x* ( xk ) k +1
2 cos hk +1 , 0 / 4.
Таким образом, если угол заранее известен, то, регулируя шаг по
формулам теоремы 1.6, можно получить сходимость итерационного процесса
(10.2.5) к точке минимума со скоростью геометрической прогрессии со
знаменателем q = r ( ) . В формуле (10.2.5) величина cos характеризует степень
вытянутости поверхностей уровня функции f ( x) .
Если в некоторой окрестности минимума функции f ( x) не существует
такого угла / 2 , что для любого x из этой окрестности выполняется (10.2.6),
то такую функцию называют существенно овражной. При минимизации
существенно овражных функций приведенный в теореме 1.6 способ
регулировки шаговых множителей неприменим. В этом случае следует
использовать универсальный способ выбора шаговых множителей (см.
теорему 1.5).
Следующая теорема, аналогичная теореме 1.6, сформулирована
непосредственно в терминах, характеризующих степень "вытянутости"
поверхностей уровня.
Теорема 1.7. Пусть выпуклая функция f ( x) определена на всем
пространстве E , x* – единственная точка минимума f ( x) и заданы начальное
приближение x и числа и h , причем 2 , h0 x0 − x* / . Рассмотрим
n
0
0
множество Y = { y : y − x h0 } . Если для любой пары точек x , z Y такой, что
*
f ( x) = f ( z ) f ( x* ) ,
выполняется условие
74
x − x* z − x* ,
то последовательность
{xk }k =0 ,
образованная с помощью рекуррентных
формул (10.2.5), где hk +1 = hk 2 − 1 / ,
геометрической прогрессии:
сходится
к
x*
со
скоростью
x − x* hk ,
за исключением случая, когда для некоторого k = k g ( x ) = 0 , т. е. x = x .
Еще одним вариантом метода обобщенного градиентного спуска,
сходящимся со скоростью геометрической прогрессии, является
субградиентный метод, в котором шаговый множитель остается в течение
определенного числа шагов постоянным, а затем уменьшается в два раза [103].
Теорема 1.8. Пусть выпуклая функция f ( x) определена на всем
пространстве E , x* – единственная точка минимума f ( x) и заданы начальное
приближение x и числа и h , причем 2 , h0 x0 − x* / . Рассмотрим
*
f
k
k
n
0
0
множество
Y = y : y − x* h0
Пусть для любой пары точек
выполняется условие
.
x, z Y
x − x* z − x*
, такой, что
f ( x) = f ( z ) f ( x* )
.
Тогда для последовательности точек {x } , построенных по формуле
(10.2.5) при h = h 2
, где a – целая часть числа a , при достаточно
большом h и N 3 2 + 1 выполняется неравенство
k k =0
−( k ) / N
k
0
0
xk − x* 2 hk , k = 0,1,2, .
Теорема 1.8 сформулирована в терминах, характеризующих степень
вытянутости поверхностей уровня, и легко видеть, что чем больше , тем
меньшей будет скорость сходимости субградиентного метода.
Методы ОГС дают возможность решать задачи производственнотранспортного планирования с применением схем декомпозиции для задач
большой размерности.
3. Алгоритм градиентного метода.
1. Задать параметр точности 0 , начальный шаг
значение
0 , выбрать
X 0 E n , вычислить
f ( X 0 ) , принять k=0.
2. Найти градиент
f ' ( X k ) и его норму f ' ( X k ) , проверить f ' ( X k ) . Если условие
выполняется, перейти к п.5, иначе – к п.3.
3. Найти новую точку X ( k +1) в соответствии с формулой (2.4) и вычислить
f ( X k +1 ) .
f ( X k +1 ) f ( X k ) , то принять: X k = X ( k +1) , f ( X k ) = f ( X k +1 ), k = 1,25k , k = k + 1 и
перейти к п.2, иначе k = 0,5 k и перейти к п.3.
4. Если
75
5. Завершить вычисления, приняв X = X , f = f ( X ) .
4. Метод наискорейшего спуска.
Данный метод является модификацией градиентного метода. Основная идея метода состоит
*
k
*
k
в том, что направление поиска S k из точки X k совпадает с вектором − f ( x) , вычислением
в точке X k и не меняется до тех пор, пока функция f ( x) убывает по этому направлению.
Точку, в которой получаем min f ( x) по направлению S k принимаем за точку x k +1 .
В этой точке вновь определяется новое направление движения S k +1 и ищется новый
min f ( x) по этому направлению. Процесс поиска оканчивается тогда, когда расстояние
между двумя последовательными минимумами окажется меньше некоторой, заранее
заданной малой величины 0 , т.е. при выполнении условия:
'
n
(x
i =1
k +1
i
− xik ) 2
(2.5)
Для нахождения min f ( x) по заданному направлению существуют разные способы. Ктике
для этого часто привлекают методы одномерной условной оптимизации, ограничивая
выбор шагового множителя в пределах от 0 до некоторого заданного положительного числа
А.
6. Алгоритм метода наискорейшего спуска.
1. Задаем точность вычисления , начальную точку
X 0, k = 0 .
0
2. Вычисляем значение f ( x ) .
3. Задаем текущий шаг, запоминаем начальную точку X k , вычисляем градиент и его норму
в этой точке.
4. Поиск min f ( x) по направлению вектора-антиградиента с помощью одного из методов
одномерной условной оптимизации функции одной переменной.
6. Проверяем условие (2.5) или f ( x) Б . Если ни одно из них не выполняется, то возврат
на п.3, иначе завершаем вычисления, положив
X * = X k +1 , f ( X * ) = f ( X k +1 ) .
Задачі для аудиторної роботи
Розв'язати задачі за допомогою методів найскорішого спуску (підйому), градієнтним
методом з дробленням кроку, з апріорним вибором кроку. Надати Геометричну
інтерпретацію процесу розв'язання.
1.
2.
z ( x, y ) = 5x2 + y 2 − 30x + 5 y → min
z ( x, y ) = x2 − 6xy + 2 y 2 − 4x + y − 2 → extr
Домашнє завдання
Используя градиентный метод с дроблением шага, с априорнім вібором шага и метод
наискорейшего спуска (подъема), реализовав их в виде программ на любом языке
программирования, найти экстремум функциї
z ( x, y ) = ax2 + bxy + cy 2 + dx + ey + f .
Параметри задавати будь-які. У випадку, коли функція необмежена зверху або знизу, видавати
відповідне повідомлення. Порівняти методи щодо швидкості пошуку екстремуму.
76
Практичне заняття № 5
Тема: метод проекції градієнта, метод умовного градієнта розв'яз ання задач
нелінійної умовної оптимізації
Задачі для аудиторної роботи
1. Розв'язати задачу оптимізації методом проекції градієнта
f = 4 ( x1 + 1) + ( x2 − 14 ) → extr
f = ( x1 + 2 ) + 4 ( x2 − 1) → extr
0 x2 2
( x1 − 4)
2
2
2
2
2
+ ( x2 + 1) 9
2
0 x1 4
f = − ( x1 + 1) − ( x2 − 5) → extr
2
z = − x12 − 2 x22 + 2 x1 + 12 x2 → extr
2
x j 0, j = 1,2
4 x1 + 5x2 25
2. Розв'язати задачі оптимізації п. 1 методом умовного градієнта, або обгрунтувати
неможливість застосування методу.
Домашнє завдання
Написати програму, що реалізовує методи умовного градїєнта і проекції градієнта для
задачі умовної оптимізації. Порівняти роботу алгоритмів.
1
f = 2 ( x1 − 2 ) + 3( x2 − 2 ) → extr
2
2
2
6 x + у 36
x1 0, x2 0
x1 + x2 12
x1 0, x2 0
3
f = ( x1 − 1) + ( x2 + 4 ) → extr
2
( x1 + 2)
5
2
2
4
+ ( x2 − 5) 16
2
x12 + 4 x22 − 6 x1 → extr
6
x12 + x22 − 4 x1 + 8 x2 4
7
x12 − x22 → extr
8
2
2
− x1 − x2 4
x1 0, x2 0
3x12 + 2 x22 − 3x1 + 1 → extr
x + y → extr
( x1 − 4) 2 + ( x2 − 3) 2 = 4
0 x1 6, 0 x2 4,
x12 + x22 16
11
f = ( x1 − 1) + ( x2 − 3) → extr
x12 + x22 4
x1 − x2 = 4,
9
z ( x, y ) = 2 x 2 + 2 y 2 − 16 x + 6 y + 1 → extr
f = (x1 − 5) + (x2 − 2) → extr
8 x1 − x2 8
9 x1 + 2 x2 36
x 0, x 0
2
1
10
f = (x1 − 1) + (x2 − 1) → extr
2 x1 + x2 10
x1 + 2 x2 4
x 0, x 0
2
1
z = x12 + 4 x22 − 2 x1 + 3x2 → extr ,
12
z = 9 x12 + x22 + 4 x1 + 36 x2 → extr ,
2
2
77
2
2
8 x1 + 5 x2 40;
3 x1 + 9 x2 27;
x j 0, j = 1,2.
13 z = − x 2 − 4 x 2 + 12 x + 32 x → extr 14
1
2
1
2
2 x1 30;
4 x1 + 3x2 24;
3x1 + 2 x2 35;
x j 0, j = 1,2.
f = − ( x1 − 4 ) − ( x2 − 4 ) → extr
2
( x1 − 5)
2
2
+ ( x2 − 5) 8
2
3 x2 15;
15
f = ( x1 − 6 ) + ( x2 − 4 ) → extr
2
2
16
2 x2 12
f = ( x1 + 2 ) + ( x2 − 6 ) → extr
2
( x1 − 8)
2
2
+ ( x2 − 2 ) 9
2
−2 x1 4
17
f = − ( x1 + 1) − 3( x2 − 5) → extr
2
( x1 + 3)
2
2
18
4 x1 + 5 x2 25,
+ ( x2 − 2 ) 16
2
x j 0, j = 1, 2.
x j 0, j = 1,2
19
f = 9 ( x1 − 5) + ( x2 + 4 ) → extr
2
( x1 − 1)
2
z = − x12 − 2 x22 + 2 x1 + 12 x2 → extr
2
20
+ ( x2 + 2 ) 4
z = −4 x12 + x22 + 12 x1 − 32 x2 → extr
2 x1 + 3 x2 24;
3x1 + x2 30;
x j 0, j = 1,2.
2
x j 0, j = 1,2
Практичне заняття № 6
Тема: Численные методы нахождения экстремума функции многих переменных с
ограничениями в форме равенств и неравенств( метод штрафных функций, метод
барьерных функций).
Цель работы: знакомство с задачей условной минимизации функции многих переменных,
т.е. с методами, где на функцию накладываются ограничениями в форме равенств и
неравенств. К ним относятся метод штрафных функций, метод барьерных функций.
Введение. Данная задача формулируется как задача условной оптимизации, сутью которой
является поиск минимума функции многих переменных при существующих ограничениях
в форме равенств и неравенств. Основная идея: свести исходную задачу к задаче
безусловной минимизации расширенной функции F ( x, k ) , которая учитывает
наложенные ограничения. В зависимости от выбора начальной точки и вида ограничений
применяют тот или иной метод.
1. Постановка задачи.
78
Дана функция y=f(X), на которую накладываются ограничениями в форме равенств и
неравенств.
( X R = j ( x) = 0, j = 1, m, g s ( x) 0, s = 1, p ).
Требуется
найти
минимум функции, используя метод штрафных функций или метод барьерных функций.
2. Метод штрафных функций при существующих ограничениях в форме равенств и
неравенств.
Этот метод применяется для решения задач условной оптимизации с ограничениями в
форме равенств и неравенств, то есть ищется
min f ( x), x R = j ( x) = 0, j = 1, m, g s ( x) 0, s = 1, p
Сведем исходную задачу к задаче безусловной минимизации функции
F ( x, k )
F ( x, k ) = f ( x) + P( x, k ) , где функция штрафа
p
m
P( x, k ) = k [ ( x) + g s2 ( x)]
j =1
2
j
s =1
g s ( x), g s ( x) 0
g s ( x) =
0, g s ( x) 0
X 0 выбирается вне допустимой области R, поэтому рассматриваемый метод называют
методом внешней точки.
0
F ( x, k ) .
Существенным в данном методе является то, что начальный коэффициент штрафа
задается небольшим, чтобы уменьшить «овражистость» расширенной функции
k возрастает с каждой итерацией X ( k ) → X при k → .
Минимизации функции F ( x, k ) происходит на основе любого метода безусловной
*
Затем
*
минимизации (прямые методы, градиентные методы). Примем за основу градиентный
метод.
3. Алгоритм метода штрафных функций.
1.
Введем n, h0 , , x = X
2.
Запомним x0 := x , h := h0 ; и вычислим
3.
Пока норма > , найти
4.
Вычислить
5.
Если x , закончить вычисления, иначе возврат на пункт 2.
(0)
, (0) , к=0.
k
fx, grad и его норму.
x( k +1) в соответствии с градиентным методом.
x( k +1) − x( k ) и увеличить ( := 10 ) .
4. Метод барьерных функций.
79
Этот метод применяется для решения задач условной оптимизации с ограничениями типа
неравенств, то есть min f ( x), x R = g s ( x) 0, s = 1, p
Сведем исходную задачу к задаче безусловной минимизации функции
F ( x, k ) .
F ( x, k ) = f ( x) + P( x, k ), x E n
Присоединенная функция P( x, k ) выбирается таким образом, чтобы она неограниченно
возрастала при приближении точки X к границе области R.
P( x, k ) = k
1
.
g S ( x)
Существенным в данном методе является то, что начальный коэффициент штрафа
0
задается большим. Начальная точка X 0 задается только внутри области R, поэтому этот
метод называется методом внутренней точки. Коэффициент
итерацией
k уменьшается
с каждой
(k → 0, k → ) . При этом
X * (k ) → X *
Минимизации функции F ( x, k ) происходит на основе любого метода безусловной
минимизации( прямые методы, градиентные методы). Примем за основу градиентный
метод
5. Алгоритм метода.
1. Начальная точка X 0 задается внутри области R. Выбираемый коэффициент
достаточно большой.
2. На каждом k-ом шаге ищется точка
X * (k ) , которая считается в качестве начальной
на следующем этапе, выполняемом при уменьшающемся значении параметра
3. При
k → 0
k
последовательность точек
k .
X * (k ) → к точке условного min X * .
При этом барьерные функции как бы препятствуют выходу из множества R. Выход из
процесса решения тот же, что и в методе штрафных функций.
Согласно оптимальной процедуре точка
для каждого
X * (k )
находится внутри допустимой области
k . Поэтому метод барьерных функций называют методом внутренней точки.
Приклад поєднання методу штрафних функцій і методу проекції
градієнта
Рассмотрим задачу определения максимального значения вогнутой
функции
при условиях:
80
Нахождение решения данной
максимального значения функции.
задачи
сводится
к
определению
являющейся суммой целевой функции задачи и функции H(x1,...,xn),
называемой штрафной функцией.
Процесс нахождения решения задачи начинают с определения любой
точки, принадлежащей области допустимых решений задачи X(k). Координаты
каждой следующей точки X(k+1) находят по формуле:
Если точка X(k) находится в области допустимых решений, то второе
слагаемое в квадратных скобках равно нулю и переход к точке
X(k+1) определяется градиентом целевой функции. Если же X(k) не принадлежит
области допустимых решений, то за счет второго слагаемого точка
X(k+1) возвращается в эту область
Итерационный процесс завершается, если:
Метод штрафных функций включает следующие этапы:
1. Определяем исходное допустимое решение задачи.
2. Выбираем шаг вычислений λ.
3. Определяем координаты следующей точки.
4. Проверяем, принадлежит ли точка ОДР. Если да, то исследуем
необходимость перехода к следующему решению, и либо находим
оптимальное решение, либо переходим к п. 2. Если найденная точка лежит
вне ОДР, то переходим к п. 5.
5. Устанавливаем значение весовых коэффициентов αi и переходим к п. 3.
Примечание
81
При выборе весовых коэффициентов нужно учитывать, что чем меньше
αi, тем быстрее находится оптимальное решение, однако при этом снижается
точность вычислений. Поэтому итерационный процесс обычно начинают при
сравнительно малых значениях αi, а затем эти значения постепенно
увеличивают. Сходимость метода штрафных функций достаточно медленная,
поэтому точность вычислений ε возьмем равной 0,1.
Пример
Найти максимальное значение функции
При условиях
В качестве исходного допустимого решения возьмем точку X(0) = (6,7).
Шаг вычислений λ возьмем равным 0,1. Найдем частные производные от
целевой функции и функции ограничения.
I итерация
Так как точка X(0) =(6,7) принадлежит ОДР, то:
g(X(1)) = 18 - 4,84 - 1,96 = 11,2 > 0
X(1) принадлежит ОДР. Найдем значение целевой функции в этой точке.
F(X(1)) = -54,4
II итерация
g(X(2)) = 18 - 9,9856 - 6,3504 = 1,664 > 0
следовательно, X(2) принадлежит ОДР
F(X(2)) = -34,816
|F(X(1)) - F(X(2))| = |-54,4 + 34,816| > ε = 0,1
следует продолжить итерационный процесс
82
III итерация
g(X(3)) = 18 - 15,429184 - 11,669056 ≈ -9,0982
значит, точка X(3) лежит вне области допустимых решений, и для
определения следующей итерационной точки необходимо использовать
весовой коэффициент α.
IV итерация
Выбирать значение α будет таким образом, чтобы точка не слишком
далеко удалялась от границы области и вместе с тем лежала внутри области.
Этим требованиям, например, удовлетворяет α=1,9.
g(X(4)) = 18 - 9,3025 - 8,037225 ≈ 0,660 > 0
F(X(4)) = -32,95
|F(X(2)) - F(X(4))| = |-34,816 + 32,95| = 1,866 > ε = 0,1
продолжим итерационный процесс
V итерация
g(X(5)) = 18 - 14,7456 - 13,454224 ≈ -10,2 < 0
значит, точка не принадлежит ОДР
VI итерация
g(X(6)) = 18 - 9,078169 - 8,649481 ≈ 0,272 > 0
F(X(6)) = -32,372
|F(X(4)) - F(X(6))| = |32,95 + 32,372| = 0,578 > ε = 0,1
продолжим итерационный процесс
VII итерация
83
g(X(7)) = 18 - 14,523721 - 14,085009 ≈ -10,609 < 0
точка не принадлежит ОДР
VIII итерация
g(X(8)) = 18 - 9,006001 - 8,856576 ≈ 0,137 < 0
F(X(8)) = -32,185
|F(X(6)) - F(X(8))| = |32,372 + 32,185| = 0,578 > ε = 0,1
продолжаем итерационный процесс
IX итерация
g(X(9)) = 18 - 14,432401 - 14,295961 ≈ -10,728 < 0
следовательно, точка X(9) не принадлежит области допустимых решений.
X итерация
g(X(10)) = 18 - 8,976016 - 8,928144 ≈ 0,096 > 0
|F(X(8)) - F(X(10))| = |32,185 + 32,128| = 0,057 < ε = 0,1
Таким образом, точка X(10) = (4,004; 4,012) является искомым решением
рассматриваемой задачи.
Задачі для аудиторної роботи
Визначитися, який метод зостосовний до розв'язання задачі умовної оптимізації і виконати
2-3 ітерації цього методу:
2
2
2
2
1. f = 4 ( x1 + 1) + ( x2 − 14 ) → extr
2. f = ( x1 + 2 ) + 4 ( x2 − 1) → extr
x1 + x2 − 1 = 0
( x1 − 4)
f = 4/ x1 + 9/ x2 + x1 + x2 → min
4 x1 + 5x2 25
4. z = − x1
3.
2
+ ( x2 + 1) 9
2
2
− 2 x22 + 2 x1 + 12 x2 → extr
4 x1 + 5x2 25
x j 0, j = 1,2
x j 0, j = 1,2
84
Домашнє завдання
Реалізувати метод зовнішнього штрафу (непарний номер варіанту) або метод бар’єрних
функцій (парний номер варіанту) для розвязання задачі умовної оптимізації з попередньої
практичної роботи.
Практичне заняття № 7
Тема: застосування еврістичних методів розв'яз ання задач комбінаторної оптимізації
Задачі для аудиторної роботи
Розглянути ідеї:
– Генетичного алгоритму
– Іммуних систем
– Методу відпалу
– Рою часток
Домашнє завдання
Реалізувати один з методів для розв'язання:
– дискретної задачі оптимального розбиття множин
– задачі комівояжера
– задачі про призначення
– задачі про покриття
Практичне заняття № 8
Тема: застосування еврістичних методів розв'яз ання задач нелінійної умовної оптимізації
Задачі для аудиторної роботи
Розглянути особливості застосування
– Генетичного алгоритму
– Іммуних систем
– Методу відпалу
– Рою часток
Для розв'язання задач нелінійної умовної оптимізації
Домашнє завдання
Реалізувати один з методів для розв'язання задач з практичного заняття 5.
Практичне заняття № 9
Тема: систематизація знань. Тестування
1. Функція f ( x1 , x2 ) = 3 − 6 x1 + 13x2
а) ні опукла і ні
б) увігнута;
увігнута;
в)
строго г) опукла і
увігнута;
увігнута.
а) строго опуклою;
в) опуклою та
увігнутою;
3. Функція f ( x1 , x2 ) = 4 x1 + 8x2 + 5x1 x2 − 3x1 x1 − 3x2 x2 є:
б) увігнута;
85
г) строго увігнута.
5. До методів безумовної багатовимірної оптимізації відноситься:
б) метод,
г) метод
заснований на
в) метод
покоординатного
функціях
Фібоначчі;
спуска.
Лагранжа;
Необхідною і достатньою умовою точки умовного мінімуму опуклої функції
а) метод проекції
градієнта;
6.
f (x)
на опуклій множині X має вигляд:
а) ( f ( x*),x − x*) 0,x X ;
в) ( f ( x*),x − x*) 0,x X ;
б) f ( x*) = 0 ;
г)
( f ( x*)( x − x*),x − x*) 0,x X .
7. Яка з наведених функцій є опуклою на E 2 ?
а)
в)
б)
z = x + 5xy + 2 y − 6 x z = 25x + 9 y − xy
2
2
2
2
;
;
Яка
з
наведених
функцій
є увігнутою?
9.
б)
а)
2
2
z = − y 2 + 3xy + 7 x − 2 ;
г)
z = y sin x + y + 10 z = x3 + 3x2 y + 7 y2 x + 2 y3
3
;
.
в)
z = −5 y − t + 6t + 2 y z = 4 t 4 + s6 − 8 t 2 г)
;
;
Методом
одновимірної
умовної
оптимізації
є
10
. a) метод по
б) метод
в) метод
координатного
дихотомії;
Ньютона;
спуску;
z = 6ts + 8t 2 .
г) метод
найшвидшого
спуску.
11
z = x2 + 2 xy + 8 y 2 − 5 y опукла на E 2 ?
. За яких умов на параметри , , функція
а) 0; 0 ;
б) 0; ;
в)
2 8; 0 ;
г)
2 8; 0 .
12 Який з методів не може бути застосований до розв’язання задачі безумовної
. багатовимірної нелінійної оптимізації?
а) метод по
координатного
спуску;
в) градієнтний
метод з
дробленням
кроку;
б) метод
Фібоначчі;
За яких умов на параметри , функція
13 E 2 ?
.
а) 0; 0 ;
б)
;
г) метод Ньютона.
z = x2 − xy + 3 y 2 + 6 x + y опукла на
2 12 ; 0 в)
0; 0 ;
г)
2 12; 0 .
14 У яких задачах точки розв’язку завжди співпадають?
c.min{f(. a.min{f(x)|xS}
b.min{f(x)|xS}
d.min{f(x)|xS}
max{f(x)|xS}
max{-f(x)|xS}
x)|xS}
max{f(x)|xS}
max{f(-x)|xS}
За яких умов на параметри , , , функція z = 5 x1 + x1 x2 + x2 + x1 + x2 опукла
на E 2 ?
2
86
2
а)
г)
в)
2
0; 20 ; + 0; 2 ;
15 0; 0;
;
. ;
.
n
16 Скільки точок мінімуму може мати строго опукла функція на E ?
б) безліч;
в) жодної;
г) n .
. а) одну;
2
б)
;
0; 2 20
17 За яких умов на параметри , , функція z = 5x2 + y 2 − 20 xy + x опукла на E 2 ?
.
в) 20; 0
а)
;
б)
;
г)
.
20
0; 0
10
;
18 Ітераційна формула градієнтного методу розв’язання задачі f ( x ) → min, x E n
. .
( k +1 )
а) x
= x( k ) − k f ( x( k ) ) ;
в) x( k +1 ) = x( k ) − f ( x( k ) )
−1
( k +1 )
= x( k ) + k f ( x( k ) ) ;
( k +1 )
= x( k ) − k f ( x( k +1 ) ) .
б) x
f ( x( k ) ) ;
г) x
19 За яких умов на параметри , , функція z = 3x2 + xy + y 2 − 8 x + y опукла на
. E2 ?
а)
1
;
12
1
3
б) ; ;
в) 0; 0 ;
20 Яка кількість розв’язків у задачі min{cTx|||x||2 1}
. a.1
b.n
c.
87
г) 0 .
d.2