БЕЛОРУССКИКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра:
«Информационно измерительной техники и технологии»
КОНТРОЛЬНАЯ РАБОТА
по дисциплине:
«Теория преобразования и передачи измерительной информации»
На тему:
«Обработка измерительной информации»
Выполнил:
студент гр.313019/28
Чернушевич Н.Н.
Проверил:
доцент Сопряков В.И.
Минск 2002.
1
ОБРАБОТКА ИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИИ
ДИСКРЕТИЗАЦИЯ ИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИИ
1. Дискретизация и восстановление непрерывных функций
При решении многих задач измерительной техники наряду с передачей, хранением и отображением измерительной информации требуется осуществлять ее обработку.
Процесс обработки измерительной информации включает в себя большой спектр операций - дискретизацию, квантование, фильтрацию, статистическую обработку данных,
автоматическую коррекцию погрешностей, вычисление корреляционных функций и
спектров сигналов, техническую диагностику и распознавание образов и др.
В этом разделе уделяется внимание вопросам дискретизации, квантования и
фильтрации, являющимся основными операциями по обработке измерительной информации.
При обработке измерительной информации цифровая дискретная форма имеет
значительные преимущества перед аналоговой. Процесс преобразования непрерывного
сигнала x(t) в дискретную форму x(ti) называется дискретизацией (квантованием) повремени
Таким образом, дискретизация представляет собой процесс получения мгновенных значений непрерывной функции в дискретные моменты времени ti. (где i=1,2,3,...).
Квантование по уровню представляет собой преобразование множества значений
сигнала x(ti) в дискретное множество значений хk, где k = 0, 1. ..., m - 1, при xk [хmin
хmax] , где хmin и хmax соответственно минимальный и максимальный пределы изменения
непрерывного сигнала.x (t).
Следовательно, непрерывный сигнал x(t) можно преобразовать в дискретную
форму по координатам х и t при совместном применении операций дискретизации и
квантования. Исходную функцию x(t) можно восстановить по дискретным ее значениям x(ti) с некоторой погрешностью. Назовем функцию восстановления x(t) по значениям x(ti.) воспроизводящей и обозначим ее через z(t):
m
z(t)=
b
k 1
k
f (t t k )
где коэффициенты bk зависят от отсчетов x(ti), x(ti-1)
Воспроизводящая функция восстанавливает исходную функцию с некоторой погрешностью и для возможности восстановления z(t) с заданной погрешностью важен
выбор числа точек дискретизации x(t), т. е. шага дискретизации Ti .= ti.-ti-1.,. Чем
меньше шаг Ti ., тем точность представления функции z(t) выше, однако при этом
проявляется избыточность и, следовательно, оптимальным будет такой шаг дискретизации, при котором воспроизводящую функцию можно восстановить с заданной погрешностью с минимальным числом выборок.
Избыточные отсчеты приводят к загрузке аппаратуры, увеличивают время обработки информации, вызывают дополнительные расходы, связанные с хранением и регистрацией данных.
Известны различные признаки дискретизации непрерывного сигнала, однако
здесь будут рассмотрены лишь равномерная и неравномерная дискретизации (соответственно и процесс восстановления).
Дискретизация называется равномерной, если Ti .= ti.-ti-1.= T— постоянная
2
величина на всем отрезке [-Т. Т] обработки непрерывного сигнала.
Выбор шага дискретизации или частоты опроса 1/ T осуществляется на основе
априорных сведений о характеристиках сигнала x(t). Важным при установлении шага
дискретизации является выбор способа восстановления сигнала x(t).
Методы равномерной дискретизации нашли широкое применение в практике измерительной техники. Алгоритмы равномерной дискретизации и соответственно методы восстановления и аппаратурная реализация их достаточно просты. В ряде случаев в
силу несоответствия между реальным сигналом x(t) и априорными сведениями о характеристиках последнего имеет место избыточность отсчетов.
Дискретизация называется неравномерной, если шаг Ti является переменной
величиной, при этом обычно рассматривают адаптивный и программный методы дискретизации. При адаптивной дискретизации шаг Ti выбирают в зависимости от характера изменения сигнала x(t) в рассматриваемый промежуток времени, а при программном методе на основе анализа текущего значения человеком-оператором либо по заранее установленной программе работы.
Неравномерная дискретизация может проводиться:
с кратными интервалами
Ti =с t,
где с = 1, 2, 3, ...; t - некоторый фиксированный элементарный шаг;
с некратными интервалами
Tmin Ti Tmax,
где Ti — непрерывная величина.
Погрешность дискретизации (t) или соответственно восстановления
исходной функции имеет вид
(t)=x(t)-z(t)
и оценка этой погрешности осуществляется следующими критериями.
При использовании критерия наибольшего отклонения
(t)M = max | (t)| = mах |x(t)-z(t)|
t Ti
должны быть известны априорные сведения о сигналах.
По среднеквадратическому критерию погрешность оценивается по формуле
1
Ti
ti
| x(t ) z (t ) |
2
dt
ti 1
При использовании среднеквадратического критерия сложность аппаратуры возрастает по сравнению с аппаратурой, использующей критерий наибольшего отклонения. Интегральный критерий имеет вид
ti
(t)=
(t )dt ,
ti 1
а вероятностный критерии определяется соотношением
p[ (t)< (t)0]=p0,
где (t)0- допустимое значение погрешности; р0 — допустимая вероятность того,
что погрешность не превысит значения (t)0.
При рассмотрении в качестве исходной функции случайного процесса числовая
характеристика погрешности на рассматриваемом интервале определяется как текущая
среднеквадратическая погрешность:
A2 (t) = M[A2(t)] ,
где A(t) — случайная функция, реализацией которой является погрешность (t)
3
Для множества реализации критерий наибольшего отклонения запишем в виде
АМ = sup | M|;
здесь верхнюю границу отыскивают по всем реализациям x(t) и z(t).
При равномерной дискретизации точки отсчета располагаются равномерно по оси
tо- Если исходная функция x(t) имеет ограниченный спектр частот, то согласно теореме
Котельникова функция x(t) может быть восстановлена без погрешности по значениям
выборок, взятых с частотой 2fM , где fM — максимальная частота в спектре сигнала. Таким образом,
T= 1/2fM = / М .
В измерительной технике сигналы, как правило, имеют бесконечный спектр, поэтому теорему Котельникова обычно рассматривают как приближенную для функций с
неограниченным спектром. На практике частоту отсчетов устанавливают по соотношению kЗ 2fМ, где kЗ — коэффициент запаса, обычно принимаемый 1,5 kЗ 6: fM —
принятая «максимальная» частота в спектре сигнала.
При адаптивной дискретизации в отличие от равномерной выбирают лишь те точки ti. и соответствующие выборки x(ti.), по которым можно восстановить исходный
сигнал x(t) с заданной погрешностью (t).
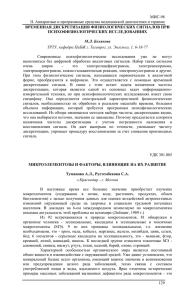
Часто ошибку дискретизации ошибочно принимают за динамическую погрешность цифрового СИ. Но ведь ошибка дискретизации не зависит от скорости изменения
измеряемой величины. В то же время погрешность восстановления является динамической, так как зависит от частоты изменения измеряемой величины. Действительно, как
показано на рис. 1,a, погрешность воспроизводящей функции зависит от выбранного
способа восстановления, так как, соединяя точки прямыми или кривыми, можно допустить совершенно различные погрешности.
Рис.1.Квантование сигналов x1(t) и x2(t):
В силу этого, указывая численное значение погрешности z(t), нужно обязательно
оговорить способ восстановления. В общем случае методы восстановления делятся на
экстраполяцию, интерполяцию, аппроксимацию и приближения.
При экстраполяции (предсказании) кривая проводится в заданном интервале по
данным предыдущего (одного или нескольких) отсчета. Пусть необходимо восстановить кривую непосредственно во время измерений. Тогда алгоритм работы СИ следу-
4
ющий: при получении текущего отсчета вплоть до очередного (последующего) отсчета
в этом интервале индуцируется значение измеряемой величины предыдущего отсчета.
При интерполяции кривая восстанавливается по результатам двух соседних отсчетов (или нескольких отсчетов), при этом воспроизводящая функция проходит через
дискретные отсчеты. При использовании аппроксимационного способа восстановления
x(t) на каждом участке между ее известными значениями заменяется кривой.
Описанные способы восстановления строятся в предположении, что каждый отсчет является точным и не содержит случайной составляющей ошибки. При наличии
многих отсчетов можно одновременно с восстановлением осуществить усреднение
случайной погрешности отдельных отсчетов и в этом случае проводят плавную кривую
в среднем по всей совокупности точек, не требуя прохождения кривой через каждую из
точек. Такое восстановление называется приближением и может быть выполнено по
методу наименьших квадратов.
2. Квантование по уровню непрерывной функции
Квантование по уровню сигнала x(t) широко используется в измерительной технике. Суть его заключается в следующем.
Непрерывные значения сигнала x(t) преобразуются в диапазоне от хmin до хmax в
моменты времени ti. в дискретное множество значений xk-уровней квантования. Здесь
квантование по уровню может быть также равномерным и неравномерным. В первом
случае весь диапазон сигнала x(t) разбивают на n одинаковых уровней - шагов квантования
k , под которым понимают k = xk-xk-1, где xk и xk-1 - соседние уровни квантования. При равномерном шаге квантования k = (хmin-xmax)/n. При выбранном шаге квантования возможны следующие способы отнесения значений сигнала x(t) к соответствующему уровню квантования:
сигнал x(ti) отождествляется с ближайшим уровнем квантования;
сигнал x(ti) отождествляется с ближайшим меньшим (или большим) уровнем
квантования.
На рис. 1а показаны два варианта сигналов х1(t) и x2(t). Для сигнала х1(t) при первом способе значение x1(ti) сигнала принимают равным уровню xk, по второму способу
- равным xk-1 По обоим способам значение x2(ti)сигнала принимают равным уровню хk-1
(рис.1б).
Возникающая при квантовании по уровню погрешность xk =x(ti) - xk связана с
заменой истинного значения сигнала x(t) некоторым уровнем xk, при этом максимальное значение погрешности зависит от принятого способа отождествления сигнала с
уровнем квантования. Для первого из способов отождествления максимальная погрешность
| xk|maxl =max[x(ti)-xk] = k
При втором способе отождествления, как видно из рис. 1, максимальная погрешность квантования не превышает 0,5 = k
Рассмотрим сигнал x(ti) = х как реализацию случайной величины Х с плотностью
распределения р(х). В этом случае погрешность квантования равна xk = х - хk. Для kго уровня квантования (k =0, ..., n - 1), если принять, что k мал по сравнению с диапазоном измерения сигнала, то математическое ожидание погрешности квантования
М [ xk] = О,
а дисперсия,
1 2
k [p(xk) k ]
D [ xk] =
12
(1).
5
Из (1) видно, что D [ xk] представляет собой дисперсию равномерно распределенного в этом интервале сигнала, умноженную на вероятность попадания х в этот интервал.
В диапазоне изменения сигнала (хmin - хmax) дисперсия полной погрешности по
всем уровня квантования
n 1
1 n 1
D [ х] = D[ x k ] =
p ( x k ) k3
12 k 0
k 0
3.КОДИРОВАНИЕ ИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИИ
Кодирование измерительной информации - это представление сообщений в форме, удобной для передачи, приема и хранения. Обратная операция восстановления сообщения по принятому сигналу называется декодированием. При этом под кодом понимают набор правил, по которым составляются отдельные комбинации из элементов
Элементами кода являются символы и позиции. Число используемых в коде символов образует основание кода m, а совокупность всех позиций - разрядность кода n.
Система счисления является частным случаем кода. В зависимости от выбранного основания различают системы счисления двоичную, троичную, восьмеричную и т.д.
Приведем пример. Пусть основание кода m = 2, т. е. рассматриваемый код состоит лишь из двух символов 0 и 1, такая система счисления называется двоичной. При
основании m = 10 (десятичная система счисления) элементарными символами являются
цифры от 0 до 9.
Общепризнанным в настоящее время является позиционный принцип образования системы счисления, при этом полное число получается суммированием значения
по разрядам:
l
Q = bl i 1 m l i = blml-1+bl-1 ml-2+……+b2m1+b1m0,
i 1
где i - номер данного разряда; l - число разрядов; bi – множитель принимающий
любые целочисленные значения в пределах от 0 до m – 1 и показывающий, сколько
единиц i-го разряда содержится в числе.
В измерительной технике наибольшее распространение получила двоичная система счисления, которая технически реализуется значительно проще, чем другие.
Для двоичного кода правила вычитания и умножения следующие;
Сложение
Вычитание
Умножение
0+0=0
0-0=0
0*0=0
0+1=1
1-0=1
0*1=0
1+0=1
1-1=0
1*0=0
1+1=10
10-1=1
1*1=1
Запись в двоичной системе счисления (в двоичном коде) приведена в табл.1.
Числа в двоичном коде
Таблица 1
Натуральный ряд чисел
0
1
2
3
Номера двоичных разрядов и соответствующие весовые коэффициенты
5
24
0
0
0
0
4
23
0
0
0
0
3
22
0
0
0
0
2
21
0
0
1
1
1
20
0
1
0
1
6
4
5
6
7
8
9
0
0
0
0
0
0
0
0
0
0
1
1
1
1
1
1
0
0
0
0
1
1
0
0
0
1
0
1
0
1
Перевод любого десятичного числа в другую систему счисления осуществляется
следующим образом. Число в десятичной системе переводится в любую другую систему путем последовательного деления чисел на основание другой системы и выписыванием остатков, которые составляют число в данной системе.
Например, переведем число 27(10) в двоичный эквивалент:
27/2=13
13/6=6
6/2=3
3/2=1
1/2=0
остаток 1
остаток 1
остаток 0
остаток 1
остаток 1
читаем остаток снизу вверх и имеем
27(10) =11011(2)
Число 1101 в двоичной системе счисления переводится в десятичную систему
следующим образом:
1101(2) =1 23 +1 22+0-21+1•2° =8+4+0+1 =13(10) .
Во многих случаях получает применение двоичный рефлексный код, или код Грея
(по имени его изобретателя).
Учитывая возможные варианты, рассмотренный выше двоичный код называют
нормальным.
В отличие от нормального рефлексный код формируется по следующему правилу.
Двоичный код данного числа сдвигается на один разряд вправо и суммируется с исходным по правилу mod2 (суммирование без переноса единиц в старшие разряды).
Возьмем, к примеру, число 7, преобразование которого из нормального Двоичного в рефлексный выполнено в табл. 2.
Числа в рефлексном виде.
Весовые коэффициенты разрядов
Двоичный код
числа 7
Сдвиг в право
на один разряд
Код Грея числа 7
1
Таблица 2
20
2
3
2
2
2
0
1
1
1
0
0
1
1
0
1
0
0
Преимущество кода Грея заключается в том, что при переходе от одного числа к
другому изменения происходят только в одном разряде.
Рассмотрим переходные положения между кодовыми обозначениями чисел 7 и 8
в двоичном коде и коде Грея по табл. 3.
Сравнение чисел в двоичном коде и коде Грея
7
Таблица 3
Код Грея
Десятичное число
Двоичный код
7
0111
0100
8
1000
1100
Как видно из табл. 3, при переходе от числа 7 к числу 8 элементы двоичного кода
меняются во всех четырех разрядах сразу, а при коде Грея - только в одном. Поэтому
при возникновении ошибки считывания погрешность двоичного кода достигает 100 %,
а в коде Грея не превышает единицы младшего разряда.
Двоичный код неудобен при вводе и выводе информации, так как трудно оперировать с непривычными двоичными числами. Кроме того. при больших числах (десятичных) запись двоичного кода становится громоздкой. Поэтому на практике получили
распространение такие системы счисления, которые легко сводятся к двоичной, но в то
же время сохраняют преимущества десятичных. К ним относятся восьмеричная, шестнадцатеричная и двоично-десятичная. Последняя получила наибольшее распространение в измерительной технике. Суть ее заключается в том, что каждая цифра десятичного числа (тетрады) представляется четырехразрядным двоичным кодом. При этом
наиболее целесообразным кодом тетрады является 8-4-2-1.
В табл. 4 приведен двоично-десятичный код с весами 8-4-2-1.
Могут быть двоично-десятичные коды и с весами 5-1-2-1 и 2-4—2-1.
Числа в двоично-десятичном коде
Таблица 4
Число в десятичном коде
Двоично-десятичный код с весами 8-4-2-1
0
1
2
3
4
5
6
7
8
9
10
0000 0000
0000 0001
0000 0010
0000 0011
0000 0100
0000 0101
0000 0110
0000 0111
0000 1000
0000 1001
0001 0000
4. ФИЛЬТРАЦИЯ ИЗМЕРИТЕЛЬНЫХ СИГНАЛОВ
Общие вопросы фильтрации
Фильтрацией в широком смысле называется любое преобразование обрабатываемых сигналов с целью изменения соотношения между их различными компонентами.
Такое преобразование может быть как линейным, так и нелинейным. Из-за сложности
анализа нелинейных систем обработки сигналов большинство практически важных результатов получено для линейных фильтров. В то же время удовлетворительной моделью большинства измерительных сигналов являются гауссовы случайные процессы, т.
е. процессы, плотность распределения вероятности которых подчиняется нормальному
закону.
Для такого класса сигналов линейные фильтры обеспечивают возможность выде8
ления с требуемыми показателями полезной информации из смеси с помехой.
В настоящее время для фильтрации импульсных помех находят применение нелинейные фильтры, в которых в качестве оценки информативного параметра сигнала
используется медиана плотности распределения вероятности. Однако по своей распространенности, математической обоснованности методы линейной фильтрации значительно превосходят методы нелинейной фильтрации.
Известно, что линейная динамическая система может быть представлена с помощью передаточной функции, импульсной или переходной характеристики. Передаточная функция H(j ) линейной системы может быть определена как отношение функций, представляющих собой частотные спектры выходного и входного сигналов. Модуль передаточной функции |H(j )| называют амплитудно-частотной характеристикой
системы.
Действие фильтра в значительной степени определяется скоростью изменения
амплитудно-частотной характеристики за пределами полосы пропускания, т. е. крутизной амплитудно-частотной характеристики (АЧХ):
= d |H(j )|/d .
Амплитудно-частотную характеристику удобно изображать в двойном логарифмическом масштабе, откладывая по оси частот lg , а по оси ординат In |H(j )| Соответственно логарифмическая крутизна
=d In |H(j )|/d lg ,.
Логарифм крутизны является безразмерной величиной, не зависящей от масштабов по осям координат, и измеряется в децибелах на октаву (дБ/октава). Октава представляет собой единицу измерения интервала частот, причем одна октава соответствует
интервалу, в котором частота изменяется вдвое.
Идеальным фильтром нижних частот называют фильтр с полосой пропускания от
нуля до некоторой частоты 1 . Внутри интервала (0, 1 .) АЧХ идеального фильтра постоянна, вне интервала - равна нулю.
Соответственно идеальный фильтр верхних частот имеет полосу пропускания от
Идеальный полосовой фильтр имеет АЧХ, равную нулю вне интервала
до
2
( 1 , 2 ). Идеальный заграждающий (режекторный) фильтр имеет АЧХ, равную нулю в
некоторой полосе частот, и постоянное значение вне этого интервала.
Таким образом, АЧХ идеальных фильтров характеризуются бесконечной крутизной. Реальные фильтры в отличие от идеальных имеют АЧХ с конечной крутизной характеристики.
В теории линейных систем используют понятие физически реализуемой системы.
Фильтр может быть физически реализуемым, если между подачей сигнала на его вход
и возникновением сигнала на выходе системы имеет место причинно-следственная
связь, т. е. сигнал на выходе не может появиться раньше, чем был подан сигнал на
вход. Как известно, реакция системы на входное воздействие в виде единичного импульса (дельта-функции) называется импульсной характеристикой системы h(t). Таким
образом, для физически реализуемого фильтра необходимо, чтобы
h(t) =0 при t < 0.
Это условие называется условием каузальности.
Вторым условием физической осуществимости фильтра является затухание импульсной характеристики со временем:
h(t) О при t
Фильтр называют устойчивым, если выполняется условие абсолютной интегрируемости импульсной характеристики:
.
| h(t ) | dt < .
В спектральной области устойчивость фильтра определяется критерием ПэлиВинера:
9
ln | H ( j ) |
d .
1 2
0
.Согласно этому условию физически неосуществим фильтр, амплитудночастотная характеристика которого в некоторой полосе частот имеет нулевые значения.
Таким образом, рассмотренные выше идеальные фильтры являются физически нереализуемыми, так как их амплитудно-частотные характеристики в соответствующей полосе частот равны нулю.
Фильтры, не удовлетворяющие условию физической осуществимости, называют
математическими фильтрами. Они могут быть осуществлены в виде цифровой системы
обработки сигналов.
Аналоговая фильтрация
В числе основных задач фильтрации измерительных сигналов наибольший интерес представляют задачи выделения полезного сигнала, наблюдаемого на фоне помех.
Здесь можно указать следующие задачи:
обнаружение детерминированного сигнала известной формы на фоне помех;
оценка информативных параметров квазидетерминированных сигналов, наблюдаемых на фоне помех;
фильтрация случайных сигналов.
Обнаружение сигналов. Задача фильтрации в рассматриваемом случае состоит в
такой обработке смеси сигнала и помехи, которая обеспечила бы максимальную вероятность правильного решения относительно наличия сигнала в наблюдаемом случайном процессе. Форма сигналов известна, в этом случае нет необходимости ограничивать искажения сигнала фильтром, поэтому необходимо в процессе фильтрации обеспечить максимально возможное превышение амплитуды сигнала над помехой, использовав для этого различия в свойствах сигнала и помехи.
Предполагается, что наблюдаемый случайный процесс представляет собой аддитивную смесь полезного сигнала и помехи. Если спектр сигнала равен S(j ), а спектральная плотность энергии помехи W(j ), то оптимальный фильтр обнаружения, как
показано в теории статистических решений, должен обладать передаточной функцией,
определяемой отношением
S * ( j ) -j t0
H(j )=
e
W ( j )
где S* (j ) - функция, комплексно-сопряженная по отношению к S(j );
t0 — момент времени, в который отношение сигнал/помеха достигает наибольшего значения.
Оптимальный фильтр с амплитудно-частотной характеристикой вида (2) хорошо
пропускает те частоты, на которых он слабее помехи. Однако фазочастотная характеристика фильтра обеспечивает синфазность всех частот сигнала в момент времени t = tо
в который производится измерение выходного напряжения фильтра.
Если помеха представлена не коррелированным случайным процессом типа белого шума (W(j )) = С2), то с точностью до постоянного множителя передаточная функция оптимального фильтра определяется выражением
H(j )=S*(j ) .
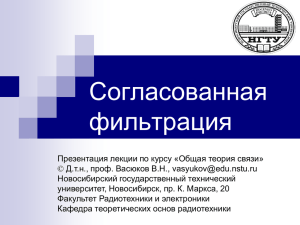
Такой фильтр называется согласованным. Во временной области согласованному
фильтру соответствует импульсная характеристика вида
h(t}=x(to –t)
т. е. импульсная характеристика согласованного фильтра является зеркальным
отображением относительно момента наблюдения полезного сигнала tо (рис. 2).
(2)
10
Рис.2.Характеристика сигнала: а-непрерывная; б-импульсная
Оценка параметров квазидетерминированных сигналов. Рассмотрим задачу
оценки информативного параметра А сигнала x(t) вида
x(t)=A u(t),
где u(t) - известная функция времени, описывающая форму сигнала, наблюдаемого на фоне помех со спектральной плотностью энергии W(j }).
В теории статистических решений показано, что рассматриваемая задача решается с помощью оптимального фильтра, передаточная функция которого совпадает с передаточной функцией фильтра обнаружения. Данное обстоятельство имеет вполне
определенный смысл, так как для снижения случайной погрешности оценки параметра
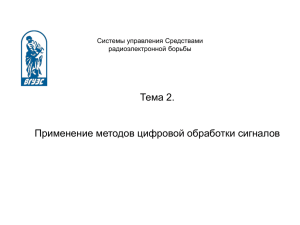
А по результату измерения выходного напряжения фильтра в момент времени tо необходимо добиться максимума превышения сигнала над помехой. Структура соответствующей линейной системы фильтрации приведена на( рис. 3). Исходный процесс z(t),
представляющий собой аддитивную смесь сигнала x(t) и помехи, умножается на образцовый сигнал u(t), формируемый генератором Г в интервале времени (0, tо), усредняется в И и подвергается линейному масштабному преобразованию П. Выходной величиной фильтра является оценка параметра А сигнала x(t).
Образцовый сигнал u(t) определяет импульсную характеристику фильтра линейной оценки, которая, как и в рассматриваемом выше случае обнаружения сигналов,
должна быть согласована с формой полезного сигнала.
Рис.3.Структура линейного фильтра
Для линейной оценки параметров сигналов, наблюдаемых на фоне некоррелированного шума, максимальное значение выходного сигнала фильтра в момент времени t
=tо
11
t0
0
0
y(t0)= ч( )h(t )dt = A u 2 ( )d .
Таким образом, коэффициент масштабного преобразования должен устанавливаться исходя из соотношения
t0
Kпр=1/ u ( )dt
0
Точность линейной оценки параметра сигнала на основе использования согласованного фильтра в случае, если форма реального сигнала отлична от формы, описываемой функцией u(t), может резко ухудшиться. Поэтому такие фильтры находят применение при решении задач оценивания, в которых неизвестным является только информативный параметр.
Фильтрация случайных сигналов. Если форма входного сигнала неизвестна, то
описанный выше подход не позволяет реализовать оптимальную фильтрацию процесса.
Задача фильтрации здесь реализуется на основе использования статистического критерия, обеспечивающего минимум дисперсии воспроизведения полезного сигнала. Чтобы
этот критерий был применим, необходима априорная информация как о статистических
характеристиках помехи (t), так и о статистических характеристиках полезного сигнала x(t), который считается случайным. Выходной сигнал фильтра в этом случае представляется связанным с некоторым входным линейным преобразованием:
y(t)=L{x(t)} .
Это преобразование выбирают по условию задачи и при синтезе фильтра предполагается, что оно известно. Например, можно потребовать, чтобы выходной сигнал
совпадал со входным:
y(t) = x(t).
Другое условие, используемое при решении задачи экстраполяции сигналов, имеет вид
y(t) =х(t+ t) .
При t > 0 фильтр, реализуемый в соответствии с этим условием, обеспечивает
прогнозирование случайного сигнала в момент времени t + t no его искаженным помехой значениям до времени t. Тип заданного линейного преобразования сигнала может быть и более сложным. В общем случае выходной процесс представляется в виде
z(t) = L { x(t}} + (t), где (t) - помеха на выходе фильтра.
Синтез фильтра в этом случае осуществляется в соответствии с критерием:
b2=M[z(t)-y(t)]2=min
где М — обозначает операцию статистического усреднения.
Как показано в теории статистических решений, импульсная характеристика оптимального фильтра в рассматриваемом случае определяется на основе решения интегрального уравнения Колмогорова-Винера, которое для непрерывных процессов имеет
вид
h( ) K
r
(t )dt =Kry( ),
где h( ) — искомая импульсная характеристика фильтра; Кr(t - ) — автокорреляционная функция входного процесса; Kry( ) — взаимная корреляционная функция
полного входного процесса x(t) + (t) и выходного сигнала y(t).
В спектральной области оптимальный фильтр определяется передаточной функцией вида
H(j )=Grz(j )/Wr(j ) ,
где Grz(j ) - Фурье-преобразование взаимной корреляционной функции;
Wr(j ) - спектральная плотность энергии входного процесса.
При решении задачи оптимального воспроизведения входного сигнала (y(t) = x(t))
12
, не зависящего от помехи, имеет место равенство
Kry( ) = M{[x(t)+ (t)]x(t- )}=Kx( ),
где Kx( ) - автокорреляционная функция сигнала x(t).
Поэтому уравнение Колмогорова—Винера принимает вид
h( ) K
r
(t )d K ry ,
где h( ) – искомая импульсная характеристика фильтра;Kr(t- ) – автокорреляционная функция входного процесса;Kry( ) – взаимная корреляционная функция полного
входного процесса x(t)+ (t) и выходного сигнала y(t)
В спектральной области оптимальный фильтр определяется передаточной функцией вида
H(j ) = Grz(j )/Wr(j ),
Где Grz(j ) – Фурье-преобразование взаимной корреляционной функции; Wr(j )
– спектральная плотность энергии входного процесса
При решении задачи оптимального воспроизведения входного сигнала(y(t)=x(t)),не зависящего от помехи,имеет место равенство
Kry( ) = M{[x(t)+ (t)]x(t- )} = Kx( ),
где Kx( ) – автокрреляционная функция сигнала x(t).
Поэтому уравнение Колмогорова-Винера принимает вид
h( ) K
r
(t )dt K x ( ),
или
H(j )=
Wx ( j )
,
Wx ( j ) W ( j )
где Wx(j ) и W (j ) - спектральные плотности энергии полезного сигнала и
помехи соответственно.
Данный фильтр по помехоустойчивости уступает фильтру обнаружения, который
обеспечивает концентрацию энергии сигнала в определенный момент времени. Однако
данный фильтр обеспечивает минимальные искажения сигнала. При высоком отношении сигнал/помеха Wx(j )/W (j ) имеем H(j ) = 1 и выходной сигнал практически
не искажается, но на частотах, где доминирует помеха [W (j ) » Wx(j )],H(j ) = 0 и
сигнал подвергается сильному искажению. В то же время никакой другой фильтр не в
состоянии обеспечить лучшего результата, каким бы плохим ни был полученный.
Наряду с рассмотренными задачами обработки случайных процессов в измерительной технике фильтрация используется и для обработки квазидетерминированных
сигналов, например для анализа частотного спектра сигналов (анализатора спектра),
выделения узкой полосы спектра, в которой сосредоточен полезный основной сигнал
сглаживания, и др.
Цифровая фильтрация
В большинстве практически важных случаев измерительной техники реализация
фильтров с заданной передаточной функцией в виде аналоговых устройств оказывается
весьма сложной задачей. Нестабильность параметров устройства обработки вызывает
неконтролируемые изменения (погрешность) выходного сигнала, что является одним
из основных недостатков аналоговых фильтров.
Цифровой фильтр (ЦФ) представляет собой цифровое устройство, реализующее в
общем случае решение уравнения в конечных разностях следующего вида:
N 1
Yk =
a
j 1
N 1
j
y k j bl xk l ,
(3)
l 0
где xk, yk - отсчеты выходного и входного сигналов фильтра соответственно;aj., bj
- константы.
13
Если известны коэффициенты aj., bj отсчеты входного сигнала хj. при i -N + 2 и
начальные значения у-1, у -2 , ..., у-M+1., то, используя приведенное выражение, можно
рассчитать отсчеты уi для любого i 0.
При цифровой фильтрации входной и выходной сигналы являются цифровыми.
Так как операция умножения отсчетов цифрового сигнала на число выполняется неточно за счет округления или усечения произведений, то в общем случае цифровое
устройство неточно реализует указанный алгоритм и выходной сигнал отличается от
точного решения уравнения. Однако в ЦФ погрешность выходного сигнала не зависит
от условий, при которых работает фильтр - температуры, влажности и т.п. Кроме того,
эта погрешность контролируема. Ее можно уменьшить, увеличивая число разрядов, используемых для представления отсчетов цифровых сигналов. Именно этим определяются основные преимущества ЦФ по сравнению с аналоговым — высокая точность обработки сигналов и стабильность характеристик.
Основные недостатки цифровых фильтров следующие:
относительно низкая скорость обработки информации, которая ограничивается быстродействием используемых устройств цифровой обработки;
необходимость использования на входе и выходе аналого-цифровых и
цифроаналоговых преобразователей;
относительно большая потребляемая мощность;
относительно высокая стоимость.
Отмеченные особенности позволяют считать ЦФ перспективными главным образом при значениях частот дискретизации до сотен килогерц.
Цифровой фильтр, реализующий алгоритм (3), называется рекурсивным. В большинстве практически важных случаев алгоритм функционирования рекурсивного
фильтра может быть представлен в более простом виде:
N 1
Yk = b1xk+
a
j 1
j
yk j .
Если в (3) все коэффициенты aj. положить равными нулю, то получим алгоритм,
описывающий функционирование нерекурсивного цифрового фильтра:
N 1
Yk =
b x
l 0
l
k l
.
Нерекурсивный фильтр иначе называют трансверсальным. Для реализации алгоритма цифровой фильтрации с помощью трансверсального фильтра на один отсчет выходного сигнала необходимо выполнить N операций умножения и N - 1 операцию сложения.
В отличие от трансверсального рекурсивный фильтр требует меньшего числа
операций на один отсчет, так как он использует результаты предыдущих вычислений
|N1 < N| Это преимущество в быстродействии заставляет искать возможность аппроксимации требуемого фильтра рекурсивным. Например, для решения часто встречающейся в измерительной технике задачи вычисления текущего среднего значения сигнала на данном отрезке времени алгоритм функционирования трансверсального фильтра
имеет вид
1 N 1
Yk =
x k l .
N l 0
Здесь на каждый отсчет уk необходимо выполнить N сложений. Нетрудно видеть,
что
та же задача может быть решена с помощью рекурсивного фильтра:
x xk N 1
yk = yk-1+ k
.
N
Таким образом, можно вычислить текущее среднее значение сигнала, используя
только три операции сложения вместо N. Необходимо отметить, что число операций
14
здесь не зависит от количества отсчетов, по которым происходит усреднение.
Цифровая фильтрация измерительных сигналов в настоящее время интенсивно
развивается на основе использования новейших достижений вычислительной техники.
В последние годы появились специализированные процессоры в интегральном исполнении для обработки измерительных сигналов, имеющие в своем составе АЦП на входе
и ЦАП на выходе и позволяющие использовать методы цифровой фильтрации при обработке аналоговых сигналов без дополнительных аппаратных затрат. Благодаря использованию новых идей в области реализации алгоритмов быстрого преобразования
Фурье (БПФ), существенно повышается скорость цифровой обработки сигналов, что
позволяет расширить частотный диапазон измерительных сигналов, которые могут
быть обработаны с помощью ЦФ.
15