НАЦІОНАЛЬНИЙ АВІАЦІЙНИЙ УНІВЕРСИТЕТ
ШУТКО Володимир Миколайович
УДК 519.21, 621.396(043.3)
СПЛАЙН-ФУР’Є МЕТОДИ Й ЗАСОБИ ПІДВИЩЕННЯ
ЕФЕКТИВНОСТІ ФУНКЦІОНУВАННЯ
АВТОМАТИЗОВАНИХ СИСТЕМ УПРАВЛІННЯ
Спеціальність 05.13.06 – автоматизовані системи управління
та прогресивні інформаційні технології
Автореферат
дисертації на здобуття наукового ступеня
доктора технічних наук
Київ – 2006
Дисертацією є рукопис.
Роботу виконано в Національному авіаційному
Міністерства освіти і науки України.
університеті
Науковий консультант
Лауреат державної премії України в галузі науки і техніки, доктор
технічних наук, професор Білецький Анатолій Якович, Національний
авіаційний університет, завідувач кафедри радіоелектроніки.
Офіційні опоненти:
Доктор технічних наук, професор Іванов Володимир Олександрович,
Національний авіаційний університет, професор;
заслужений діяч науки і техніки, лауреат державної премії України,
доктор фізико-математичних наук, професор Лигун Анатолій
Олександрович,
Дніпродзержинський
державний
технічний
університет, професор кафедри прикладної математики;
доктор технічних наук, професор Тарасов Віктор Олексійович,
Міжнародний науково-навчальний центр інформаційних технологій і
систем НАН та МОН України, провідний науковий співробітник
відділу
модельно-алгоритмічного
забезпечення
демонстраційно-навчальних комплексів.
Провідна установа
Одеський національний політехнічний університет Міністерства
освіти і науки України.
Захист відбудеться 8 червня 2006 р. о 10 годині на засіданні
спеціалізованої вченої ради Д 26.062.01 при Національному авіаційному
університеті за адресою: 03058, Київ-58, просп. Космонавта Комарова, 1,
корп. 1, мультимедійна аудиторія.
З дисертацією можна ознайомитися в науково-технічній бібліотеці
Національного авіаційного університету за адресою: 03058, Київ-58,
просп. Космонавта Комарова, 1.
Автореферат розіслано 28.04.06 р.
Вчений секретар спеціалізованої вченої ради
кандидат технічних наук, доцент
В.С. Єременко
1
ЗАГАЛЬНА ХАРАКТЕРИСТИКА РОБОТИ
Aктуальність теми. Сучасний етап у розвитку мореплавства та
авіації характеризується підвищенням рівня автоматизації управління
судном. Цей процес має об’єктивні передумови. З одного боку, він
диктується необхідністю підвищення ефективності експлуатації суден і
безпеки руху в умовах, що поступово ускладнюються; з іншого боку, він
визначається бурхливим прогресом розвитку електроніки і, в першу чергу,
мікропроцесорної інформаційної техніки.
Автоматизація процесів керування виконується в декількох
напрямках, основні з них:
- використання мікропроцесорів у традиційних приладах для
підвищення якості вимірювань і реалізації додаткових можливостей;
- утворення автоматизованих прийомоіндикаторів радіонавігаційних
систем з вмонтованими ЕОМ для обробки результатів вимірювань і
вирішення додаткових задач;
- застосування персональних ЕОМ для обробки навігаційних даних,
рішення експлуатаційно-технічних задач;
- опрацювання автоматизованих систем для вирішення певних задач
управління судном (системи: навігації, управління рухом, попередження
зіткнень, реєстрації даних та ін.);
- утворення бортових комплексних автоматизованих систем, що
забез-печують виконання всіх задач керування з урахуванням їх
взаємозв’язків.
У вітчизняній науці вперше цей підхід був застосований
В.О.Тарасовим, який вирішив проблему комп’ютеризації радіолокаційних
станцій. На сьогодні автоматизовані системи управління рухом (АСУР), як
правило, використовують цифрову обробку сигналів, відбитих від
рухомого об’єкту. При цьому виникає ряд проблем.
Неможливість повного врахування дії зовнішніх факторів на
працездатність радіоелектронної апаратури (РЕА) стає однією з
найважливіших проблем технічної експлуатації, яка набуває особливої
актуальності для аеропортів цивільної авіації, де наявність великої
кількості сусідніх джерел випромінювання призводить до необхідності
вирішення задачі завадостійкості. Але подальше підвищення імовірнісних
характеристик виявлення сигналів шляхом удосконалення апаратури і її
конструктивними змінами стає надто дорогим і практично неможливим в
сучасних економічних умовах. А тому актуальною є проблема підвищення
2
точності оцінок за рахунок розробки і застосування принципово нових
методів і алгоритмів обробки даних.
Вищесказане
дозволяє
сформулювати
важливу
в
народно-господарському
відношенні
науково-технічну
проблему
розробки нових математичних методів обробки сигналів, використання
яких дозволяє виявляти радіолокаційні сигнали з високою ймовірністю в
умовах апріорної невизначеності відносно розподілу сигналів і завад,
навіть в тих випадках, коли жоден з відомих методів не дозволяє цього
зробити.
В автоматизованих системах управління рухом для виявлення
слабких сигналів на фоні шумів використовуються спектральні методи,
реалізовані на основі відомого аналізу Фур'є. Вагомий внесок в розвиток
методів спектрального оцінювання та їх практичної реалізації належить
таким авторам, як Марпл-мол. С.Л., Пелад А., Ліу Б., Рабінер Л., Гоулд Б.,
Задирака В.К., Петренко П.А., Теслер Г.С. та іншим. Інтерес до
альтернативних методів спектрального аналізу викликаний тим
покращенням характеристик, яке вони можуть дати, а саме більш високим
частотним розділенням, підвищеною здатністю до виявлення слабких
сигналів або ж збереженням “достовірності” форми спектру за меншої
кількості використовуваних параметрів, більшою швидкістю обробки
даних.
Перспективним є поєднання властивостей Фур’є-аналізу та
сплайн-функцій, які використовуються для відновлення дискретної
вимірювальної інформації. У розробку сплайнів суттєвий доробок внесли:
Дж. Алберг, Е. Нільсон, Дж. Уолш, С.Б. Стечкін, Ю.М.Суботін, Ю.С.
Зав’ялов, М.П. Корнійчук, А.О.Лигун, Б.Г. Марченко, В.П. Денисюк, О.П.
Приставка та ін.
Основні труднощі для вирішення проблем модернізації систем
управління рухом полягають у знаходженні адекватної математичної
моделі сигналу, відбитого від рухомого об'єкту. Тоді задача розв'язується
за класичною схемою на основі відношення правдоподібності. Але, якщо
проаналізувати спектри записів реальних радіолокаційних сигналів, то
стає зрозумілим, що вони відрізняються за амплітудою, шириною смуги,
кількістю екстремумів в спектрі та іншими параметрами, і не можуть бути
описані в рамках однієї математичної моделі. Тому актуальними є
побудова узагальненої моделі сигналів, відбитих від рухомих об'єктів, та,
відповідно, розробка методу виявлення цих сигналів. Таким чином,
практичні задачі експлуатації автоматизованих систем управління рухом
3
(АСУР) являються вихідними і лежать в основі теоретичних досліджень і
їх моделювання в даній роботі.
Зв’язок роботи з науковими темами. Дисертація виконана в рамках
державних науково-дослідних робіт 0202U006821 і 0103U000687.
Мета і задачі дослідження. В роботі ставиться задача вирішення
науково-технічної проблеми розробки методів і засобів підвищення
ефективності алгоритмів обробки радіолокаційної інформації в АСУР в
умовах апріорної невизначеності відносно розподілу сигналів і завад, яка
має важливе народногосподарське значення.
Для цього створено ряд нових спектральних методів виявлення
сигналів, які забезпечують підвищення тактико-технічних характеристик
радіолокаційних систем при їх модернізації.
Об’єкт дослідження – автоматизовані системи управління рухом.
Предмет дослідження – спектральні методи ідентифікації сигналів,
відбитих від рухомих об’єктів.
Методи дослідження – моделювання випадкових послідовностей із
заданими законами розподілу; сплайн-апроксимація, побудована за
методом найменших квадратів; періодограмні, корелограмні та
параметричні методи спектрального оцінювання; оптимальні за критерієм
максимуму відношення сигнал/завада та непараметричні методи
виявлення сигналів.
Наукова новизна одержаних результатів полягає в тому, що
вперше:
- запропоновано узагальнену математичну модель радіолокаційного
сигналу, відбитого від рухомого об'єкту;
- розроблено
нові
методи
сплайн-апроксимації
часових
послідовностей з урахуванням аналітичних зв’язків між їхніми
детермінованими основами;
- побудовано “розширену матрицю планування”, яка модифікується
відповідно до різних типів аналітичних зв’язків між часовими
послідовностями, що апроксимуються сплайнами;
- розроблено теорію сплайн-Фур’є перетворення на основі
сплайн-апроксимації первісної та підінтегральної функцій з урахуванням
аналітичного зв’язку між ними;
- створено рекурентний та рекурентний сегментний алгоритми
сплайн-апроксимації спектру з часової послідовності без попереднього
розрахунку самого спектру;
- реалізовано
пристрій
сплайн-Фур’є
перетворення
на
програмованих логічних інтегральних мікросхемах (ПЛІС);
4
- розв’язано задачу розпізнавання зображень при обробці
телеметричних даних, описано умови, які потрібні для розв’язання цієї
задачі, та знайдено формули для наближеного розрахунку математичного
сподівання і середньоквадратичного відхилення статистик, які
досліджуються, – кількості так званих “плям” спекл-структури хибного та
істинного об’єктів.
Практичне значення одержаних результатів полягає в
наступному:
- на основі розроблених сплайн-Фур’є перетворень побудовано
завадостійкі спектральні методи виявлення-вимірювання доплерівських
радіолокаційних сигналів;
- побудовані
завадостійкі
методи
виявлення-вимірювання
доплерівських радіолокаційних сигналів апробовані на записах реальних
даних з голландського монохромного (TARA) та українського імпульсного
(П-26) радіолокаторів;
- на основі створеного сплайн-Фур’є перетворення розроблено
алгоритм обробки радіолокаційних сигналів в реальному часі, який може
бути використаний для модернізації існуючих радіолокаторів. Введення
методу відбувається на базі вже існуючого обладнання і не потребує
витрат на покупку нового, що в сучасних умовах фінансування дозволяє в
найкоротші строки покращити ефективність автоматизованих систем
управління рухом.
Результати даної роботи були використані в Центральному
науково-дослідному інституті навігації і управління Мінпромполітики
України при виконанні науково-дослідних та дослідно-конструкторських
робіт:
1. Розробка берегової автоматизованої системи управління рухом
“Ціль-БАСУР” у частині програмного забезпечення сигнального
процесору щодо обробки радіолокаційних сигналів.
2. Розробка суднової радіолокаційної станції “Афродіта-С” у частині
програмного забезпечення сигнального процесору щодо обробки
радіолокаційних сигналів.
Результати цієї роботи були використані для визначення параметрів
вектора
зсуву
вітру
в
бортовій
автоматизованій
інформаційно-обчислювальній системі РЛС “Контур” сучасних літаків
типу Ан-148, Ан-124 згідно з вимогами ІСАО (НВП “Фазотрон-Україна”).
Особистий внесок здобувача. При роботі над дисертацією автор
спирався на наукові досягнення та консультації академіка НАНУ
І.М.Коваленка, професорів НАУ А.Я. Білецького, В.О. Касьянова, за що
5
висловлює їм свою щиру подяку. Особистий внесок у розробку нових
сплайн-Фур’є перетворень здобувач бачить у синтезі ідей і розробок
вищевказаних вчених, які працюють у різних колах прикладної
математики. Метод сплайн-апроксимації часових послідовностей з
урахуванням аналітичного зв’язку між їхніми детермінованими основами
та розробка на його основі сплайн-Фур’є перетворення для виявлення
доплерівських радіолокаційних сигналів виконані автором самостійно.
У наукових працях, опублікованих у співавторстві авторові
належать: [1] – метод “швидкої” сплайн-екстраполяції спектру; [2, 7, 17] –
сплайн-апроксимація дискретних послідовностей; [3, 15] – рекурентний та
рекурентний сегментний методи “швидкої” сплайн-апроксимації спектру;
[4, 10] - математична коректність виводів сплайнів з неперервними
першою та другою похідними; [5, 11] – реалізація алгоритмів та їх
апробація; [6] – спектральне представлення дискретних послідовностей в
базисі трикутно-симетричних функцій; [8, 16] – сплайнове стиснення
числових даних; [9] – математичне редагування та апробація результатів;
[12] – обробка записів мовних сигналів за допомогою сплайн-функцій; [13]
– сплайн-апроксимація аналітично зв’язаних часових послідовностей; [14]
– другий розділ посібника у частині виявлення детермінованого сигналу,
сигналу з випадковою фазою та сигналу з випадковими амплітудою і
начальною фазою; [18] – сплайн-апроксимація законів розподілу
випадкових величин; [26] – інтерполяція телеметричного зображення.
Aпробація результатів дисертації. Основні наукові результати
роботи докладалися на міжнародних наукових конференціях: “Авіа-1999”,
“Авіа-2000”, “Авіа-2001”, “Авіа-2002”, “Авіа-2003”, “Авіа-2004” (м. Київ),
МНТК, присвяченій 30-річчю МДТУ ЦА (м. Москва), 1-му міжнародному
конгресі НАУ (м. Київ, 2003 р.), “Samsung Young Scientist Day” (1-2 June
2005, Kiev), “Теорія та методи обробки сигналів” (м. Київ, 2005р.), IX
Міжнародна науково-практична конференція “Системы и средства
передачи и обработки информации” (м.Черкаси, ЧДТУ, 2005), МНТК
TCSET’2006 (м.Львів). Результати досліджень тричі експонувалися на
виставках в Китаї та Німеччині.
Публікації. Результати дисертації опубліковані в двадцяти п’яти
статтях у фахових наукових журналах та збірниках, з яких сім особистих,
восьми матеріалах і тезах конференцій та навчальному посібнику.
Структура роботи та її обсяг. Робота складається з вступу, п’яти
розділів, висновків по роботі, списку літератури та додатку. Об’єм роботи
без додатку, бібліографії, рисунків і таблиць складає 250 сторінок; робота
6
вміщує 2 таблиці, 50 рисунків та 310 бібліографічних назв; загальний
об’єм роботи – 290 стор.
ОСНОВНА ЧАСТИНА
У вступі сформульована проблема дослідження, обґрунтована її
актуальність, визначені ціль роботи і коло вирішуваних задач, показана її
наукова новизна та практична значимість.
В першому розділі проведений короткий огляд літературних джерел
за темою дослідження, проводиться аналіз сучасного стану проблеми
обробки радіолокаційної інформації, порівнюються відомі алгоритми
виявлення доплерівських сигналів і визначаються їх недоліки. Виходячи з
проведеного аналізу формулюється постановка задачі, вказуються ті
питання, вирішення яких знадобилося для досягнення поставленої в
дисертації мети і розв’язання основної задачі.
Проблема формулюється наступним чином. Очевидно, що при
апріорі відомих законах розподілів завади та суміші корисного сигналу і
шуму задачу виявлення доплерівського сигналу можна розв’язати
оптимально, використовуючи відношення правдоподібності. Так, метод
ДПФ являє собою частковий випадок узгодженої фільтрації. Тому для
розв’язання задачі виявлення комплекснозначного гармонічного сигналу з
частотою, співпадаючою з частотою процесора дискретного перетворення
Фур’є (ДПФ), на фоні білого шуму цей алгоритм є оптимальним. В
природній ситуації ймовірність одержання такого сигналу, відбитого від
літака, дорівнює нулю. У випадку присутності завад в амплітуді, частоті,
фазі (або завади відсутні, але частота сигналу не співпадає з частотою
процесора ДПФ), метод ДПФ не є оптимальним. Це приводить до значного
падіння амплітуд спектральних складових в інформаційній області.
Тобто, багато задач обробки радіолокаційної інформації в традиційній
постановці являються некоректними, а одержані рішення задовольняють
умовам стійкості та єдиності тільки в окремих випадках.
В реальній ситуації закон розподілу корисного сигналу апріорі
невідомий, він залежить від багатьох факторів, але всі радіолокаційні
сигнали об’єднує одна фізична особливість – вони мають деякий
коливальний характер, інакше б вони не розповсюджувалися у просторі.
Тому в даній роботі будується не оптимальний алгоритм для апріорі
відомих розподілів, а завадостійкий метод, використання якого дає змогу
7
одержувати якісні характеристики виявлення доплерівських сигналів для
широкого спектру природних завад. Побудова цього методу і є головною
метою даної дисертаційної роботи.
Для вирішення основної задачі дослідження знадобився розв’язок
наступних підзадач:
1. Побудова узагальненої моделі вузькосмугового радіолокаційного
сигналу, параметрами якої є апріорі невідомі відхилення цього сигналу від
ідеальної гармонічної моделі.
2. Розробка методів сплайн-апроксимації часових послідовностей з
урахуванням аналітичних зв’язків між їхніми детермінованими основами.
Розробка цих методів висвітлюється в другому розділі роботи.
3.
Побудова
сплайн-Фур’є
перетворення
на
основі
сплайн-апроксимації первісної та підінтегральної функцій з урахуванням
аналітичного зв’язку між ними та розробка на його основі завадостійкого
методу виявлення-вимірювання доплерівських радіолокаційних сигналів
(третій розділ).
4. Розробка програмованих логічних інтегральних схем для апаратної
реалізації розробленого методу.
5. Обробка записів реальних сигналів голландського і українського
радіолокаторів за допомогою синтезованого сплайн-Фур’є перетворення
(розділ 5).
Другий розділ розкриває:
– теоретичні та прикладні передумови використання сплайн-методів
для дослідження проблемних задач;
– основні аналітичні співвідношення, які обґрунтовують побудову
статистичних оцінок параметрів сплайнів з використанням імовірнісного
методу найменших квадратів;
– розробку нових методів сплайн-апроксимації часових
послідовностей з урахуванням лінійного та нелінійного зв’язків між їхніми
детермінованими основами;
– розробку “розширеної матриці планування”, яка модифікується
відповідно до різних типів аналітичних зв’язків між часовими
послідовностями, що апроксимуються сплайнами.
Розглянемо побудову сплайн-апроксимації аналітично зв’язаних
часових послідовностей детальніше.
В задачах числової обробки даних, що містять випадкові складові,
часто необхідно оцінити тренди часових послідовностей, між якими існує
деякий аналітичний зв`язок.
Тоді розглянемо задачу в такій постановці.
8
Часові послідовності деяких випадкових процесів представлені відліками:
y1 ( t ) y1 ( 1 ), y1 ( 2 ),..., y1 ( N ) та y 2 ( t ) y 2 ( 1 ), y 2 ( 2 ),..., y 2 ( N ) ,
одержаними як результати вимірювань за схемою:
yi ( t ) xi ( t ) i ( t ), i 1,2,... ,
де i ( t ) - шум з нульовим середнім;
E(.) - математичне сподівання Ei ( t ) 0 ; Ei ( t ) j ( ) 2 i ij t ,
де ij , t - функції Дірака.
Нехай далі між x1 ( t ) та x2 ( t ) існує лінійний зв’язок:
b1 x1( t ) b2 x2 ( t ) d .
Складемо наступний функціонал у вигляді:
N
N
N
i 1
i 1
i 1
[ y1 ( i ) S1 ( ti )] 2 [ y 2 ( i ) S 2 ( ti )] 2 [ d b1 S1 ( ti ) b2 S 2 ( ti ) ] 2 ,
де: S1( t ) XA1 та S 2 ( t ) XA2 - кубічні ермітові сплайни, які апроксимують
часові послідовності y1 ( t ) та y 2 ( t ) ; X – матриця планування; A = { a j }rj=0 вектори оцінюваних параметрів (ординати точок "склейки" фрагментів
сплайнів), в даному випадку вага 1 .
Значення локального ермітового кубічного сплайна в довільній точці
обчислюється за формулою:
S( ) = a j -1 1 x( ) + a j
2
x( ) + a j+1
3
x( ) + a j+2
4
x( )
для [ u j , u j+1 ] , де k x( ) - локальні функції форми, k 1 4 ,
a j – значення ординат вузлів "склейки", j 1,2,...,r .
Вимагатимемо виконання умови методу найменших квадратів (МНК):
*
min . Для цього потрібен розв’язок системи з 2r рівнянь:
a 0 , j 1, r ,
1j
0 , j 1, r .
a 2 j
Розв’язати цю систему доцільніше у матричному вигляді. Тоді:
( Y1 XA1 )T ( Y1 XA1 ) ( Y2 XA2 )T ( Y2 XA2 )
( D b1 XA1 b2 XA2 )T ( D b1 XA1 b2 XA2 ).
А вимоги МНК:
( Y PA )T ( Y PA ) min ,
Y1
де: Y Y2 , Y1 [ y1( 1 ), y1( 2 ),..., y1( N )] T , Y2 [ y 2 ( 1 ), y 2 ( 2 ),..., y 2 ( N )] T –
D
9
вектори початкових часових послідовностей; D [ d ,d ,..., d ] T , розмірності
( N * 1) ;
A1
A , A1 [ a11 , a12 ,..., a1r ] T , A2 [ a 21 , a 22 ,..., a 2 r ] T - вектори ординат вузлів
A2
"склейки" фрагментів сплайну;
X
P
b1 X
X , X – блочнодіагональні матриці планування, стовпцями
b2 X
яких є локальні функції форми сплайну
матриця, розмірності N * r .
Розмірність матриці P - ( 3N * 2r ) .
Далі класичний розв’язок МНК:
k
x(t), k 1 4 [14]; - нульова
A ( P T P )1 P T Y ,
та S1 XA1 , S 2 XA2 – сплайни, які побудовані вже з урахуванням
аналітичного зв’язку між x1 ( t ) та x2 ( t ) .
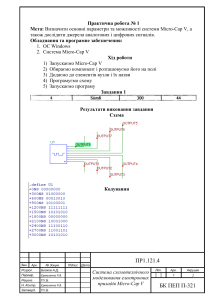
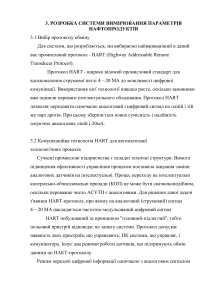
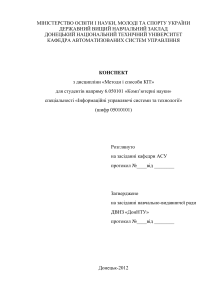
На
рис.
1
наведений
приклад
побудови
класичної
сплайн-апроксимації ( Sk1 , Sk 2 ) та сплайн-оцінки ( S1 , S 2 ) з урахуванням
аналітичного зв’язку двох часових послідовностей:
y1 ( t ) sin( t ) 1 ( t )
та
y2 ( t )
d b1
x1 ( t ) 2 ( t ) ,
b2 b2
де 1 ( t ), 2 ( t ) - нормальні шуми з нульовими математичними сподіваннями
1 2 0.5
та середньоквадратичними відхиленнями (СКВ)
( d 2, b1 1, b2 2 ).
Pиc. 1. Сплайн-апроксимації часових послідовностей
класичним ( Sk1 , Sk 2 ) та запропонованим ( S1 , S 2 ) методами
10
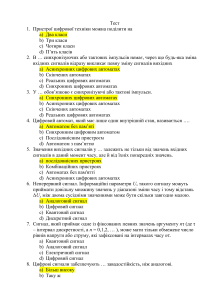
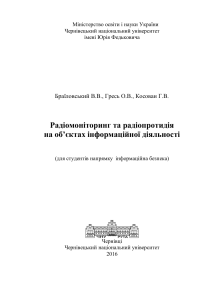
За допомогою математичного моделювання побудуємо графіки
похибок сплайнів відносно детермінованих основ ( x1 ( t ), x2 ( t ) ) в залежності
від середньоквадратичних відхилень випадкових складових ( 1 2 ) (рис.
2, а). Цікаво відмітити, що сплайн, який апроксимує першу часову
послідовність (похибка 1 ), має невелику перевагу в порівнянні з
класичним методом (похибки k1 , k 2 ), а сплайн, що апроксимує другу
часову послідовність, має перевагу в якості майже вдвічі (похибка 2 ). Це
відбувається тому, що коефіцієнти b1 та b2 в аналітичному зв’язку мають
співвідношення 1:2.
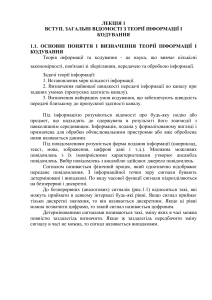
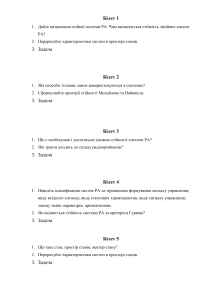
Окремий інтерес викликають задачі де часові послідовності між
детермінованими основами яких існує аналітичний зв’язок мають
випадкові складові з різними СКВ.
На рис. 3 представлені класичні сплайн-апроксимації ( Sk1 , Sk 2 ) та
сплайн-оцінки ( S1 , S 2 ) з урахуванням аналітичного зв’язку двох часових
послідовностей, які аналогічні першому прикладу, для випадку, коли
середньоквадратичні відхилення випадкових складових мають значення
1 0.25, 2 41 ( d 2, b1 1, b2 2 ).
За допомогою математичного моделювання побудуємо графіки
похибок сплайнів відносно детермінованих основ ( x1 ( t ), x2 ( t ) ) в залежності
від СКВ першої випадкової складової 1 ( 2 41 ) (рис. 2, б). Очевидним є
той факт, що похибка k 2 приблизно в чотири рази більша, ніж k1 .
а
б
Pиc. 2. Середньоквадратичне відхилення похибок сплайнів, побудованих
класичним ( k1 , k 2 ) та запропонованим ( 1 , 2 ) методами, якщо:
а – СКВ вхідних послідовностей однакові,
б – СКВ вхідних послідовностей: 2 41
А в побудові сплайн-апроксимації з урахуванням аналітичного
зв’язку відбувається “перекачування” якості. Тобто похибка 1 стає
11
більшою ніж k1 , а якість сплайн-оцінювання другої часової послідовності
значно покращується (похибка 2 ) в порівнянні з класичним методом
(похибка k 2 ).
Pиc. 3. Сплайн-апроксимації часових послідовностей
класичним ( Sk1 , Sk 2 ) та запропонованим ( S1 , S 2 ) методами
Таким чином, сплайн-оцінювання двох часових послідовностей, між
детермінованими основами яких існує аналітичний зв’язок, а випадкові
складові мають однакові СКВ, необхідно проводити запропонованим
методом. А у випадку, коли СКВ шумових складових значно відрізняються
- часову послідовність, яка краще спостерігається, потрібно
апроксимувати класичним сплайном, а часову послідовність, яка має
потужнішу випадкову складову, необхідно оцінювати сплайном з
урахуванням аналітичного зв’язку.
Цікавим є приклад модифікації вищевказаного методу для
сплайн-апроксимації оцінок кореляційних послідовностей гармонічних
сигналів з урахуванням аналітичного зв’язку між дійсною та уявною
складовими цих послідовностей.
В задачах числової обробки гармонічних сигналів, що містять
випадкові складові, часто необхідно оцінити тренди кореляційних
послідовностей цих сигналів. В класичному випадку для цього можна
використовувати комплексні сплайни з різним розташуванням вузлів
“склейки” в залежності від частоти сигналу. Але така апроксимація не
враховує аналітичного зв’язку між уявною та дійсною частинами оцінок
кореляційних послідовностей
12
1 N m1
y[n m] y*[n], 0 m N 1,
N n
0
rˆ(m) N |m|1
1 y*[n | m |] y[n], ( N 1) m 0,
N n0
(1)
де N – об’єм вхідної послідовності. Зазначимо, що цей зв’язок для
кожного часового зміщення m є незалежним від амплітуди та фази
гармонічного сигналу і дорівнює
2
km]
Im[ rˆ(m)]
N
q ( m)
,
2
Re[rˆ(m)]
cos[ km]
N
sin[
( N 1) m N 1,
(2)
де k – фіксована нормована частота. В формулі (1) вибрано зсунену оцінку
1
1
, а не
)
N
N m
для зменшення дисперсії відліків цієї функції при значних зміщеннях m .
(далі оцінку) кореляційної функції (нормуючий коефіцієнт
Далі наведемо приклади побудови запропонованої апроксимації.
Нехай спостерігається гармонічний процес із амплітудою A 1 ,
випадковою початковою фазою , рівномірно розподіленою на інтервалі
[ 0; 2 ] , нормованою частотою k 4 , об’ємом вибірки N 10 :
y( n ) y r ( n ) jyi ( n ) A exp{ j(
2
knt )} r ( n ) ji ( n ), n 0, N 1 , (3)
N
де r ( n ), i ( n ) – дійсна та уявна складові гаусівського білого шуму з
нульовим середнім та дисперсіями Vr Vi 1 . За формулою (1) знайдемо
оцінку кореляційної функції rˆ(m) . Якісну сплайн-апроксимацію такої
послідовності побудувати важко через те, що на десять відліків
приходиться чотири коливання. Тому спочатку проведемо інтерполяцію
даної оцінки, а потім по більшій кількості відліків розрахуємо
апроксимуючі сплайни за класичним та запропонованим вище методами.
На рис. 4 наведено інтерпольовану праву частину дійсної складової
оціненої кореляційної функції. За рахунок наявності шуму вона значно
відрізняється від ідеальної (побудованої в разі відсутності шуму).
Класична сплайн-апроксимація (рис. 4,а) добре наближає вхідну
послідовність, але ніякої нової інформації про процес не додає. Проте
сплайн-апроксимація, побудована з урахуванням аналітичного зв’язку між
уявною та дійсною складовими інтерпольованої оцінки кореляційної
функції (рис. 4,б), навпаки зовсім не наближує цю вхідну послідовність, а
відтворює функцію подібну до ідеальної.
Цікаво прослідкувати за поведінкою сплайнів в разі відсутності
корисної складової у вхідній послідовності ( A 0 ). На рис. 5 наведені
13
приклади апроксимації оцінки кореляційної функції шуму. Як і в першому
прикладі класичний сплайн (рис. 5,а) добре наближує оцінку R̂ r ,
а
б
Pиc. 4. Сплайн-апроксимації кореляційних послідовностей:
а – класичним ( S kr ) та б – запропонованим ( S r ) методами
але в цьому разі важко сказати про наявність чи відсутність корисної
складової в сигналі, що спостерігається. Проте сплайн, побудований
запропонованим методом (рис. 5,б), вказує на відсутність гармонічної
складової в цьому сигналі.
а
б
Pиc. 5. Сплайн-апроксимації оцінки кореляційної функції шуму
а – класичним ( S kr ) та б – запропонованим ( S r ) методами
В обох вище наведених прикладах для побудови апроксимації
класичним та запропонованим методами матриці планування
розраховувалися для однаково розташованих абсцис вузлів “склейки”
фрагментів сплайнів. Вузли підбиралися за умови якісного наближення
класичним сплайном ідеальної кореляційної функції (рис. 4).
14
В цих прикладах очевидна властивість сплайн-апроксимації з
урахуванням аналітичного зв’язку вирівнювати певною мірою
послідовності, що згладжуються під цей зв’язок. Цей факт має особливе
значення для розробки сплайн-Фур’є перетворення та побудови на його
основі завадостійкого методу виявлення радіолокаційних сигналів.
Третій розділ є основним в роботі, де:
–
запропоновано
узагальнену
модель
вузькосмугового
радіолокаційного сигналу;
– проведена сплайн-ідентифікація спектрів сигналів, що дозволяє
проводити обробку сигналів безпосередньо в спектральній області;
– запропоновані рекурентний та рекурентний сегментний алгоритми
сплайн-апроксимації спектру з часової послідовності без попереднього
розрахунку самого спектру;
– створений новий метод оцінки частоти доплерівського сигналу з
використанням
апроксимації
його
енергетичного
спектра
сплайн-функціями;
– побудована теорія сплайн-Фур’є перетворення на основі
сплайн-апроксимації первісної та підінтегральної функцій з урахуванням
аналітичного зв’язку між ними;
– розроблений завадостійкий метод виявлення доплерівських
радіолокаційних сигналів;
– проведене математичне моделювання для порівняння
запропонованих алгоритмів з відомими.
Розглянемо детальніше побудову сплайн-Фур’є перетворення на
основі сплайн-апроксимації первісної та підінтегральної функцій з
урахуванням аналітичного зв’язку між ними.
При розв’язанні задач виявлення доплерівських радіолокаційних
сигналів на фоні білого шуму в класичній літературі використовують таку
модель: сигнал, відбитий від цілі, – випадковий процес з енергетичним
спектром, який описується резонансною кривою із відносною шириною
f cT 0.05 ( T – період спостереження сигналу). Доплерівський зсув
частоти сигналу співпадає з однією з базових частот фільтру дискретного
(ДПФ) або швидкого (ШПФ) перетворень Фур’є.
В реальній ситуації доплерівська частота випадковим чином
розташована між каналами процесору ДПФ, а в амплітуді, частоті та фазі
гармонічного сигналу присутні природні завади, які залежать від
стабільності передавача, моделі літака, відстані до нього, погодних умов та
іншого. Тому в даній роботі запропоновано узагальнену модель
доплерівського сигналу:
15
2
(4)
g( k ) A A( k )exp i f d f d ( k )k ( k ) ( k ) ,
N
де: A – амплітуда коливання; k – номер відліку сигналу; i 1 ; N об’єм вибірки; f d – частота гармонічного сигналу; – випадкова
початкова фаза з рівномірним розподілом на інтервалі 0; 2 ; ( k ) -
комплекснозначні незалежні відліки нормального шуму з нульовими
середніми та одиничними СКВ в дійсній та уявній площинах; A( k ) ,
f d ( k ) , ( k ) – відліки відповідно амплітудних, частотних і фазових завад
з апріорі невідомими розподілами ймовірностей. Зазначимо, що
статистичний розподіл шуму може бути іншим.
При розробці завадостійкого методу виявлення доплерівських
сигналів для широкого спектру природних завад використовується
фізична закономірність – в разі відсутності завад сигнал представляє
собою комплекснозначну гармоніку (6).
Отже часова послідовність комплекснозначного процесу (4)
представлена відліками:
g( t ) g( 0 ), g( 1 ),..., g( N 1 ).
(5)
Ці відліки в подальшому обробляються процесором ДПФ.
Спочатку розглянемо спостереження гармонічного сигналу із
випадковою початковою фазою без присутності шумів:
2
g( k ) A exp i
f d k .
N
(6)
Частота f d співпадає з однією з базових частот фільтру ДПФ.
Помітимо, що при перемноженні вектора-стовпця, який складається з
відліків g( k ) , на строку матриці ДПФ із відповідною частотою одержуємо
відліки підінтегральної функції y ( k ) із постійними амплітудами в уявній
та дійсній частинах. Значення цих амплітуд залежить від амплітуди A та
фази , але важливо, що:
Re[ y ( k )] const 1, Im[ y ( k )] const 2 , k 0, N 1 .
(7)
Очевидно, що накопичення цих відліків відбувається за лінійними
законами в уявній та дійсній частинах. При поступовому додаванні
відліків y ( k ) одержуємо відліки первісної функції h( k ) , абсолютне
значення якої в точці k N 1 дорівнює амплітуді спектру на даній частоті.
Незалежно від фази та амплітуди A в (6) (крім A 0 ) незмінними є
співвідношення:
Re[ c( k )]
Re[ h( k )]
k 1, k 0, N 1,
Re[ y ( k )]
(8)
16
Im[ h( k )]
Im[ c( k )]
k 1, k 0, N 1 .
Im[ y ( k )]
Далі для узагальненої моделі доплерівського сигналу (4) побудуємо
метод сплайнового згладжування послідовностей h( k ) та y ( k ) з
накладанням умов зв’язку (8). Помітимо, що хоча відліки нормального
шуму ( k ) є незалежними, шумові складові послідовності h( k ) будуть
корельованими. Сплайнове оцінювання спочатку побудуємо для двох
послідовностей без урахування кореляційних властивостей шумових
складових h( k ) , а потім за допомогою узагальненого методу найменших
квадратів (УМНК) їх врахуємо. Взаємна кореляція між відліками y ( k ) і
h( k ) швидко спадає до нуля, тому в даному методі вона не враховується. В
реальній ситуації кореляційні властивості корисного випадкового сигналу
врахувати неможливо через відсутність достатньої апріорної інформації, а
кореляційну матрицю для фонових шумів завжди можна оцінити чисельно.
Складемо наступні функціонали:
R
N 1
N 1
k 0
k 0
{Re[ h( k )] Re[ Sh ( k )]}2 {Re[ y ( k )] Re[ S y ( k )]}2
N 1
(9)
{Re[ Sh ( k )] ( k 1 ) Re[ S y ( k ) ]} 2 ,
N 1
k 0
N 1
{Im[ h( k )] Im[ Sh ( k )]}2 {Im[ y ( k )] Im[ S y ( k )]}2
k 0
k 0
N 1
{Im[ Sh ( k )] ( k 1 ) Im[ S y ( k ) ]} 2 ,
k 0
де: Sh ( k ) ZAh та S y ( k ) PA y – комплекснозначні кубічні ермітові сплайни,
які апроксимують відліки первісної h( k ) та підінтегральної y ( k ) функцій;
Z , P – дійсні матриці планування (в загальному випадку вони можуть бути
неоднаковими внаслідок різного розташування вузлів “склейки”) для
сплайнів Sh , S y ; Ah = { a hl }ls=1 , A y = { a yl }ls=1 – комплексно-значні вектори
оцінюваних параметрів (ординати точок "склейки" фрагментів сплайнів).
Комплекснозначний локальний ермітів кубічний сплайн в довільній
точці обчислюється за формулою:
S( ) = al 1 1 x( ) + al 2 x( ) + al 1 3 x( ) + al 2 4 x( ) для [ ul ,ul+1 ] , (10)
де: m x( ) – дійсні локальні функції форми, m 1 4 ; al - комплексні
значення ординат вузлів "склейки", l 1,2,...,s .
R min, min .
Мінімізуємо функціонали:
Для цього потрібен розв’язок систем рівнянь:
17
R
0
,
l
1
,
s
,
Im[ a ] 0, l 1,s ,
Re[ a ]
hl
hl
та
R
0, l 1,s .
0 , l 1, s ,
Im[ a yl ]
Re[ a yl ]
Запишемо функціонали R та в матричному вигляді:
(11)
R (Re[ H ] Z Re[ A h ]) T (Re[ H ] Z Re[ A h ])
(Re[ Y ] P Re[ A y ]) T (Re[ Y ] P Re[ A y ])
~
~
( Z Re[ A h ] P Re[ A y ]) T ( Z Re[ A h ] P Re[ A y ]),
(Im[ H ] Z Im[ A h ]) T (Im[ H ] Z Im[ A h ])
(Im[ Y ] P Im[ A y ]) T (Im[ Y ] P Im[ A y ])
(12)
~
~
( Z Im[ A h ] P Im[ A y ]) T ( Z Im[ A h ] P Im[ A y ]),
1 p11 1 p12 ... 1 p1s
2 p
2 p22 ... 2 p2 s
~
21
;
де: матриця
P
. . .
N pN ,1 N pN ,2 ... N pN ,s
має зміст ваги (в даному прикладі 1 ).
(13)
Позначимо:
H
T
R Y , H h( 0 ), h( 1 ),..., h( N 1 ) , Y y ( 0 ), y ( 1 ),..., y ( N 1 )T –
D
вектори, які складаються з відліків первісної та підінтегральної функцій;
D [ 0,0,..., 0 ] T , розмірності ( N * 1 ) ;
A
A h , A h [ ah1 ,ah 2 ,..., ahs ] T , A [ a ,a ,..., a ] T – вектори ординат
y
y1 y 2
ys
A y
вузлів "склейки" фрагментів сплайнів.
Далі позначимо:
Z
W
Z
P ,
~
P
Z ,P
– блочнодіагональні матриці планування,
стовпцями яких є локальні функції форми сплайну
– нульова матриця, розмірності N * r ;
~
P – матриця (13).
m
z(t) ,
m
p(t) , m 1 4 ;
18
Розмірність матриці W – ( 3N * 2s ) .
Тоді вимоги МНК:
(Re[ R ] W Re[ A ])T (Re[ R ] W Re[ A ]) min ,
(Im[ R ] W Im[ A ])T (Im[ R ] W Im[ A ]) min .
Далі класичний розв’язок:
A ( W TW )1W T Re[ R ] i * ( W TW )1W T Im[ R ] ,
(14)
а з урахуванням кореляції розв’язки узагальненого МНК по дійсній та
уявній складових:
~
~
~
~
~
(15)
A ( W T M W )1W T M Re[ R ] i * ( W T M W )1W T M Im[ R ] ,
M 1
~
де: M E , M 1 – матриця, зворотна до кореляційної матриці
E
шумових складових Re[ h( k )] та Im[ h( k )] ;
E – одинична матриця, розмірності ( N * N ),
– нульова матриця, розмірності N * N .
~
~ ~
Знаходимо S~ ZA
, S PA – комплекснозначні сплайни, які побудовані
h
h
y
y
вже з урахуванням аналітичних зв’язків (9).
Далі розраховуємо оцінки амплітуд спектру на кожній частоті
процесору ДПФ:
N 1
~
Sˆ (n) S y (n, k ) , n 0, N 1 .
k 0
(16)
Ці оцінки одержані шляхом сплайнового вирівнювання часових
послідовностей h( k ) і y ( k ) з виконанням умов (8), що відповідають моделі
гармонічного сигналу (6). Зазначимо, що вирівнюючи послідовності
корисних сигналів, спотворених завадами, ми також “вирівнюємо”
послідовності шумових складових в разі відсутності корисної інформації.
Це приводить до підвищення порогу прийняття рішення про виявлення
сигналу для забезпечення однакової з класичним методом імовірності
хибної тривоги.
Далі наводяться характеристики запропонованого методу та методу
класичного прямого перетворення Фур’є, одержані за допомогою
комп’ютерного моделювання.
Порівняємо амплітуди сигналів A (4), необхідні для досягнення
ймовірності правильного виявлення Ppv 0.9 для обох методів при
19
ймовірності хибної тривоги Fht 10 3 для різних завадових ситуацій:
2
g( k ) A A( k )exp i f d f d ( k )k ( k ) ( k ) .
N
Об’єм вибірки сигналу N 256 .
1) A = f = =0, частота f d співпадає з однією з базових частот
процесора ДПФ (ідеальний випадок). Для досягнення Ppv 0.9 при
Fht 10 3 амплітуда сигналу A для запропонованого методу повинна бути
на 1.9 дБ більшою ніж при використанні ДПФ.
2) A = f = =0, зсув частоти сигналу f d знаходиться рівно між
базовими частотами процесора ДПФ. Характеристики виявлення однакові.
3) A = =0, f =0.002/ T , тобто СКВ частотної завади дорівнює
по-ловині одного частотного каналу. Амплітуда сигналу A для
запропонованого методу повинна бути на 2 дБ меншою ніж при використанні
ДПФ.
4) A = =0, f =0.002/ T , зсув частоти сигналу f d знаходиться рівно
між базовими частотами процесора ДПФ. Амплітуда сигналу A для
запропонованого методу на 3 дБ менша ніж при використанні ДПФ.
5) A = 0.1A , = 0.05( 2 ) , f =0.004/ T , зсув частоти сигналу f d
знаходиться рівно між базовими частотами процесора ДПФ. Амплітуда
сигналу A для запропонованого методу на 4.7 дБ менша ніж при
використанні ДПФ.
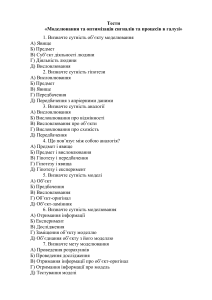
На рис. 7 наведено характеристики виявлення для п’ятого прикладу.
Рис. 7. Характеристики виявлення доплерівських сигналів на основі:
а – методу ДПФ, б – запропонованого методу
Таким чином, розроблений метод являється конкуренто спроможним
по відношенню до класичного методу ДПФ при виявленні доплерівських
радіолокаційних сигналів в складній завадовій ситуації.
Четвертий розділ присвячено наступним питанням:
– вплив когерентності вищого порядку на формування зображення
опроміненого предмета (цілі);
–
статистичні
властивості
інтегральної
інтенсивності
випромінювання;
– спекл-ефекти при когерентному формуванні зображення складного
об’єкта;
– розпізнавання локаційних цілей з однаковою ефективною
поверхнею розсіяння за інтенсивністю відбитого сигналу;
20
– розрахунок формул для розпізнавання при малих і великих
значеннях параметра, який є числом інтервалів когерентності, що
вкладаються в межі часу виміру;
– виведення співвідношення для визначення помилок І і ІІ роду.
Спекл-эфекти при когерентному формуванні зображення
Коли зображення складного об'єкту формують за допомогою
висококогерентного світла, що генерується лазером, відразу ж виявляється
дуже важливий вид дефекту зображення. Якщо поверхня об'єкту
шорсткувата в масштабі оптичних довжин хвиль (а це справедливо для
більшості оптичних об'єктів), то зображення здається зернистим, з
безліччю світлих і темних плям, що не мають видимого зв'язку з
макроскопічними розсіювальними властивостями об'єкта. Таку хаотичну і
неупорядковану структуру прийнято називати “спекл-структурою”.
Розпізнавання в лазерній локації цілей з однаковою ефективною
поверхнею розсіяння
Відомо, що в лазерній локації внаслідок флуктуацій сигналу в
атмосфері, інтенсивність відбитого від цілі сигналу – це випадкова
величина, яка має гамма-розподіл. Параметр цього розподілу дорівнює
кількості так званих “плям” спекл-структури. Кількість цих “плям”
залежить від об’ємних параметрів цілі. Проте, інтенсивність відбитого
сигналу залежить не тільки від величини цілі, а й від матеріалів її
виготовлення, тобто – залежить від ефективної поверхні розсіяння.
Використовуючи вищевказане, будують так звані хибні цілі. Тобто
конструюють літальні апарати з малими габаритами, але використовуючи
спеціальні матеріали, куткові відбивачі та інше, досягають того, щоб
середня інтенсивність сигналів, відбитих від таких цілей та істинних була
однаковою. Таким чином, необхідно розв’язувати задачу про їх
розпізнавання. Нехай існує ціль, яка може бути істинною або хибною. Ми
досліджуємо її короткими імпульсами.
Необхідно розпізнати її за інтенсивністю відбитого сигналу.
Інтенсивність відбитого сигналу I - випадкова величина, яку
спостерігаємо. Задані апріорні щільності розподілів цієї величини:
I 1 1
1
* I
* exp
*
1
I
I
1
I 0 1
1
* I
W0 ( I )
* exp
*
0
I
I
0
W1( I )
1
1
1
1
0
0
– для істинної цілі,
– для хибної цілі,
21
де: I – середнє значення інтенсивності, воно однакове для обох
розподілів і апріорі задане; 1 і 0 – кількість “плям” ( 1 0 ), апріорі
відомі, в досліді не спостерігаються.
Об’єкт спостерігається протягом деякого часу tрозп . За цей час
одержуємо n -вимірну незалежну вибірку I1 , I 2 , , I n . Необхідно визначити
до якого з розподілів W1 чи W0 належить вибірка, оцінити достовірність
розпізнавання. Або інакше: як повинні розділятися 1 і 0 , щоб
імовірність розпізнавання Pрозп 0,9 .
Період слідування імпульсів: T 100 імп / сек . Час розпізнавання
tрозп 30 сек .
Існує задача вибору однієї з двох альтернативних гіпотез. Звичайно
розглядаються:
P( помилки І роду ) Р( прийняти істинну ціль за хибну ) ,
P( помилки ІІ роду ) Р( прийняти хибну ціль за істинну ) .
Якщо говориться просто про помилку розпізнавання, то, очевидно,
помилки І і ІІ роду прирівнюються; так і будемо будувати критерій. За
змістом задачі вважаємо 0 1 заданими числами.
Проведемо вивчення логарифму відношення правдоподібності.
Маємо (при m 1 або 0, m - номер гіпотези) :
I m
I m
ln I m ln
.
I
I
lnW1 ( I ) W0 ( I ) ln W1 ( I ) ln W0 ( I )
ln Wm ( I ) ln ( m )
Звідки
( 1 ) I
1 0 1 ln I1 0 ln I 0 .
( 0 ) I
I
I
I
X
. Функція розподілу цієї
I
(17)
ln
Позначимо
величини:
FX ( x ) P X x PI x I FI x I ,
звідки щільність розподілу: f X x I f I x I .
Значить при m -й гіпотезі (при m 1 або 0):
f X x
m m
m
X m 1e x m .
(19)
Формула спростилася: I в неї не входить. Тобто, будемо вважати,
що в k -му спостереженні спостерігалася нормована випадкова
інтенсивність X k
Ik
, і тільки з I k , 1 k n , будемо мати справу.
I
22
Відмітимо, що випадкова величина X k при m -й гіпотезі має розподіл
Ерланга порядку m з математичним сподіванням 1. Можна записати так:
1
1 ... ,
Xk
де: m , k – незалежні показникові величини з параметром 1. Тобто,
MX k 1 . Звідки центрована величина
X k X k 1, M X k 0 .
2
U X k .
Розглянемо статистику:
k 1
2
1
1
2
При m маємо: M X k M 1 ... 1 .
n
Так як
M i2 x 2 e x dx 2 ,
Mi j M i M j 1, при i j .
0
Звідки
MU
Обчислимо дисперсію. Спочатку
n
.
(20)
2
2
2
M
(
)
3
(
1
)
M (1)
1
.
M X k2
3
4
M ( 1 ) ( x 1 ) e dx 1,
Тоді
2
2
M ( 1 ) ( x 1 )4 e x dx 9 .
x
0
4
0
Підставляючи M ( 1 )2 та M ( 1 )4 в попередню формулу, одержуємо:
4
3
6
M X k 2 3
Звідки
DU
2
2
6
D X k 2 3
,
.
2n
3
1
.
M2
M
(21)
Випадкова величина U має розподіл p(U), близький до нормального,
з параметрами, вказаними в таблиці:
MU
При 0-й гіпотезі
(ціль хибна)
C0
n
0
DU
2n
3
D02 2 1
0 0
При 1-й гіпотезі
(ціль істинна)
C1
n
1
D12
2n
3
1
12 1
23
Критерій сформулюємо так: при U L приймаємо гіпотезу 1, тобто
вважаємо ціль істинною; при U L вважаємо ціль хибною. Щоб зрівняти
ймовірності помилок І і ІІ роду, знайдемо L з рівняння:
L C1 C0 L
.
D1
D0
C D C0 D1
.
L 1 0
D0 D1
Звідки
Ймовірності помилок І та ІІ роду:
x
(22)
C C1
,
1 0
D
D
1
0
(23)
t2
2 dt
1
.
e
2
Щоб 0,1 , 0,1 , необхідно задовольнити умові 1 0,1 , або
0,9 .
де ( x )
З таблиці знаходимо
C0 C1
1,3 .
D0 D1
(24)
Тепер підставимо C0 ,C1 , D0 , D1 в формулу (24):
n 1 0
3
3
2 1 1
0 1
0
1
1,3 .
(25)
Підставляючи n 3000 , одержуємо кінцеву умову розпізнавання з
імовірністю 0,9 :
1 0
0,0336 .
3
3
1 1
0 1
0
1
(26)
Чисельний розрахунок показує, що при 0 12 задача розв’язується
при будь-яких 1 0 . Якщо 0 12 , то при 1 0 1 задача не
розв’язується, але при 1 0 2 розв’язується, коли 0 27 . При великих
0 , 1 в (26) наближено замінюємо корені одиницями. Тоді для того, щоб
задача розв’язувалася при 1 0 k , для 0 одержуємо наближену
умову: 0 15k .
У п’ятому розділі проводиться практичне втілення розроблених у
попередніх розділах методів і проведена апаратна реалізація (технологія
24
ПЛІС), а також експериментальні дослідження алгоритмів обробки
радіолокаційної інформації.
Апаратна реалізація cплайн-Фур’є перетворення
Найбільш зручною формою реалізації є здійснення швидкого Фур’є
перетворення із часовим вікном, коефіцієнти якого обчислені враховуючи
сплайн-перетворення.
Для
реалізації
швидкого
перетворення
скористаємося алгоритмом Кулі-Тьюкі. Розглянемо приклад реалізації
пристрою сплайн-Фур’є перетворення на програмованих логічних
інтегральних мікросхемах (ПЛІС). Розрахунки у пристрої виконуються у
16 розрядній цілочисельній арифметиці зі знаком. Вихідний сигнал є
знаковим, 16 розрядним. Модель пристрою реалізовано у середовищі DSP
altera Builder (Simulink). Схема верхнього рівня показана на рис.10.
Введення методу відбувається на базі вже існуючого обладнання і не
потребує витрат на закупку нового, що в сучасних умовах фінансування
дозволяє в найкоротші строки покращити ефективність РЛС як в
цивільній, так і в військовій сферах.
Для прикладів обробки записів реальних допплерівських
радіолокаційних сигналів на основі сплайн-Фур’є перетворення
використані записи сигналів з монохромного голландського радіолокатора
TARA та імпульсного українського радіолокатора П-26.
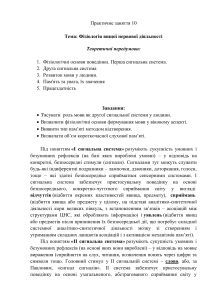
Спектральна обробка радіолокаційних сигналів, записаних на
монохромному голландському радіолокаторі TARA
На рис. 11 зображені оцінки амплітудних спектрів сигналів. Ці сигнали
одержані голландським радіолокатором TARA.
Доплерівські радіолокаційні сигнали, об’ємом вибірки N 256 ,
спостерігалися двадцять разів в одному кутовому напрямку з одного й того
ж кільця дальності. На рис. 11 зображені відліки оцінок спектральної
щільності потужності (СЩП) всіх двадцяти реалізацій ( M 256 * 20 5120 ).
Рис.10. Схема верхнього рівня пристрою сплайн-Фур’є перетворення на ПЛІС
а
б
в
Рис. 11. Оцінки СЩП радіолокаційних сигналів, одержані:
а – методом ДПФ, б – з використанням вікна Кайзера,
в – сплайн-Фур’є методом
На рис. 12 зображені середні (з двадцяти) значення спектрів,
одержаних трьома методами. Видно, що вони мають приблизно однакові
амплітуди на відповідних частотах. На рис. 13 зображені середньо-
25
квадратичні відхилення двадцяти спектрів відносно середнього, одержані
цими методами. Очевидно, що використання вікна Кайзера приводить до
незначного зменшення середньоквадратичного відхилення в порівнянні з
методом ДПФ, а використання сплайн-Фур’є перетворення суттєво
покращує цей показник.
а
б
в
Рис. 12. Середні значення спектрів
радіолокаційних
сигналів,
одержа-них: а – методом ДПФ, б – з
вико-ристанням вікна Кайзера, в –
сплайн-Фур’є методом
а
б
в
Рис.
13.
Середньоквадратичні
відхи-лення спектрів радіолокаційних
сигналів, одержаних: а – методом
ДПФ, б – з використанням вікна
Кайзера, в – сплайн-Фур’є методом
На рис. 14 зображені відліки СЩП теж двадцяти реалізацій
( M 256 * 20 5120 , TARA) реальних сигналів, але з кільця дальності, де
відсутній корисний сигнал (на вхід приймача поступає тільки шум). На
нульовій частоті – постійна складова. На рисунку видно, що використання
запропонованого методу (рис. 14,в) дозволяє знизити поріг прийняття
рішення при забезпеченні однакової з відомими методами імовірності
хибної тривоги.
а
б
в
Рис. 14. Оцінки СЩП радіолокаційних сигналів, одержані:
а – методом ДПФ, б – з використанням вікна Кайзера, в – сплайн-Фур’є методом
Рис. 15 ілюструє роздільну здатність трьох вищевказаних методів
( M 256 * 20 5120 , TARA). Видно, що за цим показником сплайн-Фур’є
метод поступається прямому ДПФ, але перевершує періодограмні оцінки з
використанням вікна Кайзера.
а
б
в
Рис. 15. Оцінки СЩП радіолокаційних сигналів, одержані: а – методом ДПФ,
б – з використанням вікна Кайзера, в – сплайн-Фур’є методом
Спектральна обробка радіолокаційних сигналів, записаних на
імпульсному українському радіолокаторі П-26
Рис. 16, 17 показують переваги даного методу у відношенні
сигнал/шум. Записи реальних сигналів проводились на українському
радіолокаторі. На рисунках зображені оцінки спектрів цих сигналів. Об’єм
вибірки N 50 , кількість кілець дальності – 600.
26
Рис. 16. Оцінки СЩП радіолокаційних сигналів, одержані методом ДПФ
Рис. 17. Оцінки СЩП радіолокаційних сигналів, одержані запропонованим
методом
Рис. 18 показує можливості даного методу по виявленню
малорозмірних цілей (дані аналогічні попереднім).
а
б
Рис. 18. Оцінки СЩП радіолокаційних сигналів, одержані:
а –методом ДПФ (зліва), б – запропонованим методом (справа)
Можна зробити висновок, що запропонований сплайн-Фур’є метод
виділяється серед відомих стійкістю до апріорі невідомих відхилень
сигналів від ідеальної гармонічної моделі. Його застосування показало
значну ефективність при обробці записів реальних сигналів. Середній
виграш у відношенні сигнал/шум за потужністю складає 60%.
Застосування даного методу дозволяє досягати заданих
характеристик РЛС з меншою потужністю передавача, що зменшує
опромінення обслуговуючого персоналу або ж покращує тактико-технічні
характеристики (дальність і якість виявлення цілі та інші) при тій самій
потужності.
У висновках формулюються основні наукові результати виконаних
досліджень. Розглядаються також проблемні питання, які витікають з
даної роботи, що представляють собою перспективні задачі для подальших
досліджень.
Додаток включає інформацію про впровадження одержаних автором
наукових результатів у виробництво.
ВИСНОВКИ
27
Сформульовано, досліджено та розв’язано проблеми розробки
методів та алгоритмів виявлення вузькосмугових сигналів на основі
нового сплайн-Фур’є перетворення. Сукупність одержаних в дисертації
результатів розв’язує важливу в народногосподарському відношенні
науково-технічну проблему розробки нового математичного методу
обробки сигналів, використання якого дозволяє виявляти радіолокаційні
сигнали з високою ймовірністю в умовах апріорної невизначеності
відносно розподілу сигналів і завад, навіть в тих випадках, коли жоден з
відомих методів не дозволяє цього зробити.
Вирішення сформульованої проблеми полягає в наступному:
1. Показані проблеми спектрального аналізу при вирішенні задач
виявлення-вимірювання вузькосмугових процесів. Встановлено, що
апріорі невідомі незначні відхилення амплітуди, частоти і фази сигналу від
гармонічної моделі призводять до значного зменшення амплітуд
спектральних складових в інформаційній області.
2. Запропоновано метод чисельного інтегрування з використанням
швидкого
сплайн-перетворення,
який
дозволяє
знаходити
сплайн-апроксимацію первісної функції безпосередньо з підінтегральної
без попереднього обчислення самої первісної.
3. Створено метод сплайн-апроксимації часових послідовностей з
урахуванням аналітичного зв’язку між ними. Показано, що врахування
аналітичного зв’язку між детермінованими основами часових
послідовностей призводить до зменшення середньоквадратичного
відхилення.
4. Сплайн-апроксимація, побудована з урахуванням аналітичного
зв’язку між уявною та дійсною складовими інтерпольованої оцінки
кореляційної функції, на відміну від відомих методів апроксимації
сплайн-функціями, зовсім не наближує вхідну послідовність, а відтворює
функцію подібну до ідеальної.
5. Розроблено рекурентний та рекурентний сегментний алгоритми
сплайн-апроксимації спектру з часової послідовності без попереднього
розрахунку самого спектру. Встановлено, що основною перевагою
сплайн-ідентифікації спектрів в порівнянні з відомими є можливість
локальної деталізації спектру.
6. На основі сплайн-апроксимацій первісної та підінтегральної
функцій з урахуванням аналітичного зв’язку між їхніми детермінованими
основами розроблено завадостійкий метод виявлення допплерівських
радіолокаційних сигналів. Проведено аналіз, який виявив конкурентну
спроможність розробленого сплайн-Фур’є методу у порівнянні з
28
класичним методом ДПФ при виявленні сигналів в складній завадовій
ситуації. Це дозволяє знизити імовірність хибної тривоги при заданому
відношенні сигнал/шум (або підвищити відношення сигнал/шум при
заданій імовірності хибної тривоги).
7. Вперше розв’язана задача розпізнавання зображень складного
об’єкту при обробці телеметричних даних лазерних систем. Описані
умови, які потрібні для розв’язання цієї задачі. Знайдені формули для
наближеного
розрахунку
математичного
сподівання
та
середньоквадратичного відхилення статистик, які досліджуються кількості так званих “плям” спекл-структури хибного та істинного
об’єктів.
8. Проведене моделювання і випробування розробленого в
попередніх розділах методу обробки радіолокаційної інформації на
конкретних прикладах. Розроблені програми в пакеті Matlab для
моделювання реальних шумоподібних сигналів і наступної їх
сплайн-обробки. Запропонований сплайн-Фур’є метод вирізняється серед
відомих стійкістю до апріорно невідомих відхилень сигналів від ідеальної
гармонійної моделі. Його застосування показало значну ефективність при
обробці записів саме реальних сигналів. Середній виграш у відношенні
сигнал/шум за потужністю складає 60 %.
9. Пристрій сплайн-Фур’є перетворення апаратно реалізований на
програмованих логічних інтегральних мікросхемах (ПЛІС). Формою
реалізації є здійснення швидкого Фур’є перетворення із часовим вікном,
коефіцієнти якого обчислені враховуючи сплайн-перетворення. Модель
пристрою реалізовано у середовищі DSP altera Builder (Simulink).
10. Математичні наробки та оригінальні алгоритми обробки
нестаціонарних квазікогерентних сигналів використані для визначення
параметрів вектора зсуву вітру в бортовій автоматизованій
інформаційно-обчислювальній системі РЛС “Контур” сучасних літаків
типу
Ан-148,
Ан-124 згідно з вимогами ІСАО. Це дозволяє проводити виявлення та
класифікацію складних малорухомих повітряних об’єктів в умовах дії
завад. Аналіз частотних спектрів сигналів, відбитих від повітряних
об’єктів, проводиться в сигнальному процесорі бортової автоматизованої
інформаційно-обчислювальної системи з використанням оптимізованих
алгоритмів сплайн-Фур’є перетворення на сучасній елементній базі ПЛІС
фірми Xilinx з архітектурою FPGA.
Одержані результати можуть бути використані для виявлення
малорозмірних та малорухомих цілей в повітрі, на землі, на фоні морської
29
поверхні, попередження зіткнень морських і повітряних суден, для
дослідження хмар на градонебезпечність, виявлення жертв землетрусів та
снігових лавин, вимірювання швидкості потоку крові (в медицині) та ін.
ОСНОВНІ ПОЛОЖЕННЯ ДИСЕРТАЦІЇ ОПУБЛІКОВАНІ В ПРАЦЯХ
1. Белецкий А.Я., Шелевицкий И.В., Шутко В.Н. Спектральный анализ
сверхмалых выборок наблюдений // Защита информации. – К.: КМУГА,
1998, № 2. – С. 70-76.
2. Білецький А.Я., Шелевицький І.В., Шутко В.М. Наближення
залежностей за допомогою дискретних сплайнових базисів // Вісник
КМУЦА . – К.: КМУЦА, 1999, № 1. – С. 85-89.
3. Білецький А.Я., Шелевицький І.В., Шутко В.М. Рекурентний
сплайн-метод спектрального оцінювання // Вісн. КМУЦА, 1999, № 2. –
С. 138-141.
4. Білецький А.Я., Матіборський В.В., Сенін О.О., Шутко В.М. Побудова
квазіортогональних сплайнових базисів з неперервною першою
похідною // Вісн. центрального наукового центру транспортної академії
України. – К.: 1999, № 2. – С.17–21.
5. Білецький А.Я., Матіборський В.В., Шелевицький І.В., Шутко В.М.
Побудова ермітових сплайнових базисів у лагранжівій формі //
Актуальні проблеми автоматизації та інформаційних технологій: збірн.
наук. пр. – Дніпропетровськ: Навч. кн., 1999. Т. 2. – С. 20-25.
6. Белецкий А.Я., Клобуков В.В., Шутко В.Н. Синтез и анализ базиса
треугольно-симметричных
функций
//
Актуальні
проблеми
автоматизації та інформаційних технологій: Зб. наук. пр. – Дніпропетр.:
Навч. кн., 2000. Т. 3. – С. 28–39.
7. Білецький А.Я., Шелевицький І.В., Шутко В.М., Юрко Ю.В. Адаптивна
обробка геохімічних аналізів за допомогою сплайнової моделі // Вісн.
КМУЦА, 2000, № 1–2. – С. 89–93.
8. Білецький А.Я., Шелевицький І.В., Шутко В.М., Ткаченко Є.В. Сплайнові
базиси в задачах стиснення числових даних. – Вісн. КМУЦА №3–4,
2000. – С. 119–124.
9. Білецький А.Я., Шелевицький І.В., Шутко В.М., Юрко Ю.В. Побудова
тривимірних ермітових інтерполяційних сплайнів // Вісн. НАУ. 2001, №
1(8). – С. 150–153.
10. Білецький А.Я., Рашевський М.О., Шелевицький І.В., Шутко В.М.
Умови неперервності двох похідних в сплайнових базисах, одержаних
згорткою // Вісн. НАУ, 2001, № 2(9). – С. 177–181.
30
11. Білецький А.Я., Шелевицький І.В., Шутко В.М., Міначева А.В.
Приведення сплайнових базисів до лагранжевої форми // Актуальні
проблеми автоматизації та інформаційних технологій: збірник наукових
праць. – Т. 4. – Дніпропетровськ: Навч. кн., 2001. – С. 8–14.
12. Давлетьянц А.А., Шутко В.Н. Использование вейвлет и сплайн
преобразований для сжатия речевых сигналов // Защита информации. –
К.: НАУ, 2002. Вып. 2(9). – С. 85–91.
13. Касьянов В.О., Шутко В.М., Шелевицький І.В. Сплайн-апроксимація
аналітично зв’язаних часових послідовностей // Вісник НАУ, 2001,
№ 4(11). – С. 117–120.
14. Кузнецов А.К., Сенин А.И., Соленов В.И., Шутко В.Н. Обнаружение и
различение сигналов: Учеб. пособие. – К.: КМУГА, 1999. – 94 с.
15. Сенін О.О., Сольонов В.І., Шелевицький І.В., Шутко В.М. Рекурентний
сегментний сплайн-метод спектрального оцінювання // Защита
информации. – К.: КМУГА, 1999. – С. 147–150.
16. Турчак В.В., Шелевицький І.В., Шутко В.М. “Необмежені” сплайни в
задачах фільтрації та стиснення даних // Вісн. КМУЦА, 1998, № 1. –
С. 275–279.
17. Шелевицький І.В., Шутко В.М. Вибір сплайнових базисів у задачах
оптимальної лінійної фільтрації // Захист інформації. – К.: КМУЦА,
2000, № 2. – С. 40–44.
18. Шелевицький І.В., Шутко В.М., Юрко Ю.В. Базисні сплайни та їх
зв’язок з законами розподілу // Захист інформації. – К.: КМУЦА, 2000,
№ 1. – С. 28–32.
19. Шутко В.М. Метод численного интегрирования с применением
быстрого сплайн-преобразования // Защита информации. – К.: КМУГА,
1999. – С. 141–144.
20. Шутко В.М. Метод и алгоритм обнаружения-измерения доплеровских
шумоподобных сигналов // Актуальні проблеми автоматизації та
інформаційних технологій: Зб. наук. пр. – Дніпропетровськ: Навч. кн.,
1999. Т. 1. – С. 129–135.
21. Шутко В.М. Стійкі до частотної завади методи спектрального
оцінювання // Актуальні проблеми автоматизації та інформаційних
технологій: Зб. наук. пр. – Дніпропетровськ: Вид-во Дніпропетр. ун-ту,
2001. – Т. 5. – С. 12–16.
22. Шутко
В.М.
Сплайн-апроксимація
оцінок
кореляційних
послідовностей гармонічних сигналів // Вісник НАУ. – К.: НАУ, 2002,
№ 1(12). – С. 73–77.
31
23. Шутко В.М. Завадостійкий метод виявлення вузькосмугових
доплерівських сигналів // Захист інформації. – К.: НАУ, 2002, № 1(10). –
С. 68–73.
24. Шутко В.М. Розпізнавання в лазерній локації цілей з однаковою
ефективною поверхнею розсіяння // Вісник НАУ. – К.: НАУ, 2002,
№ 2(13). – С. 102–106.
25. Шутко В.М. Результати обробки записів реальних радіолокаційних
сигналів на основі сплайн-Фур’є перетворення // НТЖ “Электроника и
связь”. – К.: НТУУ “КПІ”, 2005, № 6. – С. 38–46.
26. Ясенко С.А., Савченко О.В., Шутко В.М. Особливості формування
зображення за допомогою матричного приймача // Вісн. НАУ, 2001,
№ 3(10). – С. 146–149.
АНОТАЦІЯ
Шутко В.М. Сплайн-Фур’є методи й засоби підвищення
ефективності функціонування автоматизованих систем управління. –
Рукопис.
Дисертація на здобуття наукового ступеня доктора технічних наук за
спеціальністю 05.13.06 – автоматизовані системи управління та
прогресивні інформаційні технології. – Національний авіаційний
університет, Київ, 2006.
Пропонується новий спектральний метод виявлення доплерівських
радіолокаційних сигналів. Апріорі невідомі відхилення реальних сигналів
від ідеальної гармонічної моделі призводять до значного падіння
характеристик виявлення цих сигналів. Запропонований метод
відрізняється від відомих стійкістю до таких відхилень. Його застосування
показало значну ефективність при обробці записів саме реальних сигналів.
Середній виграш у відношенні сигнал/шум складає за потужністю 60%.
Застосування даного методу дозволяє досягти заданих характеристик
радіолокаційних станцій з меншою потужністю передавача. Це зменшує
опромінення обслуговуючого персоналу.
Метод може бути використаний для виявлення малорозмірних і
малорухомих цілей в повітрі, на землі, на фоні морської поверхні,
попередження зіткнень морських і повітряних суден, для дослідження
хмар на градонебезпечність, виявлення жертв землетрусів та снігових
лавин, вимірювання швидкості потоку крові (в медицині) та іншого.
32
Ключові слова: автоматизовані системи управління рухом,
сплайн-Фур’є перетворення, виявлення доплерівських радіолокаційних
сигналів, завадостійкість.
АННОТАЦИЯ
ШУТКО В.Н. Сплайн-Фурье методы и средства повышения
эффективности функционирования автоматизированных систем
управления. – Рукопись.
Диссертация на соискание ученой степени доктора технических наук
по специальности 05.13.06 – автоматизированные системы управления и
прогрессивные информационные технологии. – Национальный
авиационный университет, Киев, 2006.
Диссертация посвящена решению важной научно-технической
проблемы разработки нового математического метода обработки
сигналов,
применение
которого
позволяет
обнаруживать
радиолокационные сигналы с высокой вероятностью в условиях
априорной неопределенности относительно распределения сигналов и
помех, даже в тех случаях, когда ни один из известных методов не
позволяет этого сделать. Для решения данной проблемы понадобилось
следующее:
–
предложить
обобщенную
математическую
модель
радиолока-ционного сигнала, отраженного от движущегося объекта;
– построить метод численного интегрирования с использованием
“быстрого” сплайн-преобразования;
– разработать новые методы сплайн-аппроксимации временных
последовательностей с учетом аналитических связей между их
детерминированными основами (учет этих связей уменьшает
среднеквад-ратические отклонения аппроксимирующих сплайнов
относительно
детерминированных
основ
обрабатываемых
последовательностей);
– построить “расширенную матрицу планирования”, которая
модифицируется для различных типов аналитических связей между
временными последовательностями, аппроксимируемыми сплайнами;
– разработать теорию сплайн-Фурье преобразования на основе
сплайн-аппроксимации первообразной и подынтегральной функций с
учетом аналитической связи между ними;
33
– на основе разработанных сплайн-Фурье преобразований построить
помехоустойчивый спектральный метод обнаружения доплеровских
радиолокационных сигналов;
– создать рекуррентный и рекуррентный сегментный алгоритмы
сплайн-аппроксимации спектра временной последовательности без
предварительного расчета самого спектра.
В работе показано, что априори неизвестные отклонения реальных
сигналов от идеальной гармонической модели приводят к значительному
падению характеристик обнаружения этих сигналов. Предложенный
метод отличается от известных стойкостью к таким отклонениям. Его
применение оказалось наиболее эффективным при обработке записей
именно реальных сигналов с голландского монохромного радиолокатора
TARA и украинского импульсного локатора П-26. Средний выигрыш в
отношении сигнал/шум по мощности составляет 60%.
Устройство сплайн-Фурье преобразования аппаратно реализован на
программируемых логических интегральных микросхемах (ПЛИС) фирмы
Xilinx с архитектурой FPGA.
Внедрение метода происходит на базе уже существующего
оборудования и не требует затрат на закупку нового, что в современных
условиях финансирования позволяет в кратчайшие сроки улучшить
эффективность автоматизированных систем управления подвижными
объектами. Применение данного метода позволяет достигать заданных
характеристик РЛС при меньшей мощности передатчика, что уменьшает
облучение обслуживающего персонала или же позволяет улучшить
тактико-технические характеристики РЛС при той же мощности
передатчика.
Математические наработки и оригинальные алгоритмы обработки
нестационарных квазикогерентных сигналов использованы в аппаратуре
модернизированной
бортовой
автоматизированной
информационно-вычислительной системы современных самолетов типа
Ан-148, Ан-124.
Метод может быть также использован для обнаружения
малоразмерных и малоподвижных целей на фоне морской поверхности,
предупреждения столкновения судов, для исследования облаков на
градоопасность, обнаружения жертв землетрясений и снежных лавин,
измерения скорости потока крови (в медицине) и другого.
Ключевые слова: автоматизированные системы управления
движением, сплайн-Фурье преобразование, обнаружение доплеровских
радиолокационных сигналов, помехоустойчивость.
34
SUMMARY
Shutko V.N. The spline-Fourier methods and facilities for increase of
functioning efficiency of the automated management systems. – Manuscript.
Dissertation submitted towards the Technical Science Doctoral Degree on
speciality 05.13.06 – Automated management systems and progressive
information technologies. National Aviation University, Kyiv, 2006.
The new spectral method for doppler radio-locating signals detection is
proposed. A priori unknown deflections of real signals from ideal harmonic
model bring to considerable falling of detecting characteristics. The proposed
method is remarkable for its stability to these deflections. Using of this method
show the sizeable effectiveness for processing real signals recording. Middle
gain in signal-to-noise ratio is 60% for power.
The device for realization of the algorithm for calculating spline-Fourier
transformation is based on programmable logical integral circuits. Using of this
method allow to attain goal characteristics of radio-locating station with the less
power of transmitter. This is decrease radiation treatment of attendants.
Mathematical works and original algorithms of the unstationary quasicoherent
signals processing are used in the apparatus of the modernized side automated
information-computer system of multifunction airplanes An-148, An-124.
This method may be used for detecting low-sized targets against a sea
background, prevention ships collision, investigation clouds to hailing danger,
disclosure of earthquakes and avalanche victims, measuring speed of blood
stream (in medicine), etc.
Key words: automated traffic management systems, spline-Fourier
transformation, doppler radio-locating signals detection, interference immunity.