СЕТЕВОЕ ПЛАНИРОВАНИЕ И УПРАВЛЕНИЕ
реклама

СЕТЕВОЕ ПЛАНИРОВАНИЕ И
УПРАВЛЕНИЕ
Сетевой моделью (другие названия: сетевой график, сеть)
называется экономико-компьютерная модель, отражающая
комплекс работ (операций) и событий, связанных с
реализацией
некоторого
проекта
(научноисследовательского, производственного и др.),
в их
логической и технологической последовательности и связи.
Математический аппарат СПУ базируется на теории графов.
Основой
сетевого планирования и управления является
сетевая модель, в которой моделируется совокупность
взаимосвязанных работ и событий, отображающих процесс
достижения определенной цели.
Она может быть
представлена в виде графика или таблицы.
Основные понятия сетевой модели: событие, работа и путь.
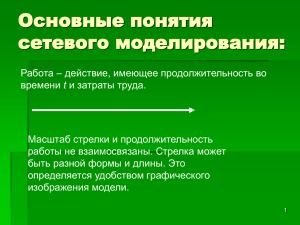
Работа характеризует материальное действие,
требующее
использования ресурсов, или логическое, требующее лишь
взаимосвязи событий. При графическом представлении работа
изображается стрелкой, которая соединяет два события. Она
обозначается парой заключенных в скобки чисел (i,j), где i — номер
события, из которого работа выходит, а j — номер события, в
которое она входит. Каждая работа имеет определенную
продолжительность t(i,j).
Событиями называются результаты выполнения одной или
нескольких работ. Они не имеют протяженности во времени.
Событие свершается в тот момент, когда оканчивается последняя из
работ, входящая в него. События кружком (или иной геометрической
фигурой), внутри которого проставляется его порядковый номер (i =
1, 2, ..., n).
В сетевой модели имеется начальное событие (с номером 1), из
которого работы только выходят, и конечное событие (с номером N),
в которое работы только входят.
Путь — это цепочка следующих друг за другом работ,
соединяющих начальную и конечную вершины
Продолжительность пути определяется суммой
продолжительностей составляющих его работ.
Путь, имеющий максимальную длину, называют
критическим и обозначают Lкp, а его
продолжительность — tкр.
Для событий рассчитывают три числовых характеристики: ранний и
поздний срок совершения события, а также его резерв.
Ранний срок tр наступления события определяется
величиной наиболее длительного отрезка пути от
исходного до рассматриваемого события, причем
tр(1) = 0, a tр (N) = tKp(L):
tр(j)=max { tр(i) +t(i,j)}; j=2,…,N
Ранний срок первого события равен нулю.
Для всех
остальных работ,
нужно взять ранние сроки
предшествующих событий (по входящим в данное событие
стрелкам)
и прибавить к ним продолжительности
соединяющих события работ (над стрелками).
Среди полученных чисел выбрать наибольшее.
Поздний срок tп наступления события характеризует
самый поздний допустимый срок, к которому должно
совершиться событие, не вызывая при этом срыва срока
свершения конечного события:
tп (i) = min { tп (j) - t(i,j)};
j=2,…,N-1
Этот показатель определяется «обратным ходом»,
начиная с завершающего события, с учетом соотношения
tп (N) = tp (N).
Для каждой работы можно определить показатели:
Полный резерв времени Rп(i,j) – максимальное время, на
которое можно увеличить продолжительность данной работы,
не изменяя продолжительности критического пути.
Rп(i,j)= tп(j) - tр(i) - t(i,j)
Свободный резерв времени Rс(i,j) - максимальный запас
времени, на который можно задержать начало работы или (если
она началась в ранний срок) увеличит ее продолжительность, не
изменяя ранних сроков начала последующих работ;.
Rс(i,j)= tр(j) - tр(i)- t(i,j)
Независимый резерв времени Rн(i,j) - запас времени, при
котором все предшествующие работы заканчиваются в
поздние сроки, а все последующие – начинаются в ранние
сроки. Использование этого резерва не влияет на
величину резервов времени других работ.
Rс(i,j)= tр(j) - tп(i)- t(i,j)