Торгашова Ольга Юрьевна, НОЦ
реклама

Саратовский государственный университет
НОЦ-006
Торгашова Ольга Юрьевна
СТРУКТУРНО-ПАРАМЕТРИЧЕСКАЯ
ИДЕНТИФИКАЦИЯ
ДИНАМИКИ СТЕНКИ СОСУДА
1
2
МОДЕЛИ ДИНАМИКИ СЕРДЕЧНО-СОСУДИСТОЙ СИСТЕМЫ
1. Модель кардиоваскулярной системы в виде связанных осцилляторов
[A. Stefanovska, 2007]
l
l
x1 x1q1 y11 2 x2 3 x3 4 x4 5 x5 6 P ( z , t )dz 7 ( z , t )dz,
0
0
y1 y1q1 x11 2 y2 3 y3 4 y4 5 y5 ,
l
l
x2 x2 q2 y22 4 x4 5 x5 6 P ( z , t )dz 7 ( z , t )dz,
0
(1)
0
y 2 y2 q2 x22 4 y4 5 y5 ,
x3 x3q3 y33 2 x2 4 x4 5 x5 6 P ( z , t ),
y3 y3q3 x33 2 y2 4 y4 5 y5 .
Здесь x – кровоток, создаваемый i-м осциллятором, y – скорость потока как
результат действия i-го осциллятора. i = 1 для сердца (1 21,1 Гц), i = 2
для респираторной активности (2 20,2 Гц), i = 3 для миогенной
активности (3 20,1 Гц), j, k, l – оцениваемые параметры, (z, t) –
поток в каждой точке кровеносной системы, P(z, t) – давление,
генерируемое легкими.
3
( z , t )
P( z , t )
1
2 x5 , i 0, i 1, 2,
t
z
P( z , t )
( z , t )
1
2 x3 3 x4 , i 0, i 1, 2,
t
z
(0, t ) x1 (t ), (l , t ) 0, P(0, t ) x2 (t ), P(l , t ) 0,
(2)
где i, i – параметры управления.
2. Модель электрической активности сердца в виде связанных
осцилляторов [D. di Bernardo et al, 1998]
x1 1 С1 x2 ,
x 1 L x g ( x ) R ( x x ) A cos(2ft ),
2
1 1
2
2
4
(3)
x
1
С
x
,
3
2
4
x4 1 L2 x3 f ( x4 ) R ( x2 x4 ),
где x2 описывает электрический импульс (биопотенциал), порождаемый
синусно-предсердным узлом, x4 – биопотенциал, порождаемый предсердножелудочковым узлом, C1, C2, L1, L2, R – параметры системы, g(x2), f(x4) –
полиномиальные функции; A, f – параметры внешнего возмущения.
4
ИДЕНТИФИКАЦИЯ СТРУКТУРЫ МОДЕЛИ
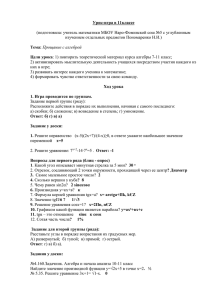
x, усл. ед.
Модельное уравнение динамики
стенки сосуда:
(4)
x F ( x) x ax 0,
где x – линейное перемещение стенки
сосуда, a 02, 0 – собственная
частота соответствующей линейной
t, c
задачи, F(x) – некоторая нелинейная Рис. 1. Экспериментально полученный
функция.
сигнал артериальной пульсовой волны
Вид нелинейной функции:
(5)
F x 1 x 2 r02 2 x 2 02 r02 .
Решение уравнения (4) с учетом (5) при 1 0, 2 0:
x(t ) 2r0 cos0t 0 , 0 const.
Решение уравнения (4) с учетом (5) при 1 0, 2 0:
0
x(t ) 2r0
cos0t 0 , 0 const.
30
(6)
(7)
5
Решение уравнения (4) с учетом (5) при 1 0, 2 0:
1 2 02
cos0t 0 , 0 const.
2
1 3 20
x(t ) 2r0
(8)
Модельное уравнение динамики стенки сосуда с учетом кровотока:
x 1 x 2 r02 x 2 x 2 02 r02 x ax b cos ωt , ω 2ω0 . (9)
Решение модельного уравнения (9):
2
x(t ) 2r0
b
302
1 2 02 1 b 1 12 202
cos0t 0
2
2
2
2
1 3 20
3r00 1 3 20
cos 20t.
(10)
6
АНАЛИЗ РЕШЕНИЯ МОДЕЛЬНОГО УРАВНЕНИЯ
Форма Коши системы (9):
x y,
y 1 x
2
r02
x 2 x
2
02 r02
x ax b cos ωt, ω 2ω0 .
(11)
Периодическое решение системы (11):
x (t ) A cos0t 0 B cos 20t ,
y (t ) d x (t ) dt A0 sin 0t 0 2 B0 sin 20t ,
(12)
2
где A 2r0
1 2 02 1 b 1 12 202
b
, B 2.
2
2
2
2
1 3 20
30
3r00 1 3 20
Матрица Якоби системы (11):
0
1
J x, y
2
2 2
2
2 .
a 21 xy 1r0 20 r0 1 x 3 2 y
(13)
7
Характеристические показатели корни уравнения
det E2 0, где Eu – единичная матрица размеров uu.
Матрица определяется выражением
1
J x (t ), y (t ) dt
0
(14)
1
0
a r 2 1 A2 1 B 2 2 r 2 3 A2 6 B 2 .
2 0 0
1
0
2
2
2
Характеристические показатели:
2
(15)
f 1 , 2 , 0 , r0 , a
f 1 , 2 , 0 , r0 , a
1, 2
4.
2a
2a
1
1
3
где f 1 , 2 , 0 , r0 , a 1 r02 A2 B 2 202 r02 A2 6 B 2 .
2
2
2
Условие устойчивости периодического решения (12):
1 2 02
b2
f 1 , 2 , 0 , r0 , a
или
. (17)
0 (16)
4 2
2
180 r0 1 12 20
2a
8
ПАРАМЕТРИЧЕСКАЯ ИДЕНТИФИКАЦИЯ МОДЕЛИ
Параметрическая идентификация модели (11).
0 0 5,89 [рад], a 02, b 0,63 [усл.ед./с2].
(18)
Рассмотрим модель
xS f ( xS , t ) G( xS , t )w(t ), h(t ) z ( xS , t ) (t ), xS (t0 ) x0 ,
(19)
где xS colon{x, y, 1, 2, r0} colon{x1 , x2 , x3 , x4 , x5} – обобщенный
вектор состояния, включающий в себя внутренние состояния системы (11),
а также параметры, подлежащие идентификации, w(t) – вектор
возмущений, (t) – вектор помех измерения,
x2
( x 2 x 2 ) x x ( x 2 2 x 2 ) x x ax b cos 2 t
1
5 2 3
2
0 5 2 3
1
0
f ( xS , t )
0
,
0
0
z ( xS , t ) E2 023 xS , G( xS , t ) colon{023 , E3}.
здесь и далее 0uv обозначена нулевая матрица размеров uv.
(20)
(21)
9
Стабилизирующий функционал:
1T
(22)
( xˆ ) ( xˆ x )T Rx1 ( xˆ x )dt,
2 t0
5
где xˆ R – оценка вектора xS, x R 5 – вектор эталонной модели,
Rx1 Rx1 (t ) R 55 – диагональная матрица масштабирования.
Сглаживающий функционал:
1
1T T
T 1
I [( xˆ x ) R0 ( xˆ x )] w (t ) Rw1w(t )dt
2
2 t0
1T
[h(t ) z ( xS , t )]T R1[h(t ) z ( xS , t )]dt ( xˆ ),
2 t0
(23)
где R01 Rx1 (t0 ) R55 , Rw1 Rw1 (t ) R55– весовые матрицы,
характеризующие точность определения начального состояния системы и
интенсивность возмущающих воздействий соответственно; – параметр
регуляризации.
10
Уравнения регулярного оценивания:
xˆ f ( xˆ , t ) P(t ) z T ( xˆ , t ) xˆ (t ) R1[h(t ) z ( xˆ , t )] Rx1 ( xˆ x ) ;
P (t ) f ( xˆ , t ) xˆ P(t ) P(t ) f T ( xˆ , t ) xˆ G ( xˆ , t ) RwG T ( xˆ , t )
(24)
P(t ) xˆ z T ( xˆ, t ) xˆ (t ) R1[h(t ) z ( xˆ , t )] Rx1 P(t ).
Значения весовых матриц и параметра регуляризации, при которых в
ходе моделирования были получены удовлетворительные результаты:
Rw diag{0,15; 104 ; 103 ; 1; 1},
R1 50 diag{102 ; 101},
(25)
Rx1 diag{102 ; 103 ; 1; 10; 10},
10.
Значения параметров, полученные в ходе интегрирования уравнений
регулярного оценивания (время интегрирования 30 с):
1 0,5 [1/(усл.ед.2∙с)], 2 0,001 [с/усл.ед.2], r0 33,239 [усл.ед.]. (26)
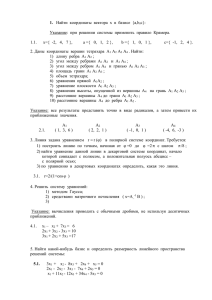
РЕЗУЛЬТАТЫ МОДЕЛИРОВАНИЯ СИСТЕМЫ
Интегрирование уравнения (9) с параметрами (18), (26) проводилось в
системе Matlab. Результаты представлены на рис. 2.
x, усл. ед.
t, c
Рис. 2. Графики экспериментально полученного сигнала (серая
сплошная линия), сигнала эталонной модели (пунктирная линия)
и оценки (черная сплошная линия)
11