Квазиоптимальный алгоритм
реклама

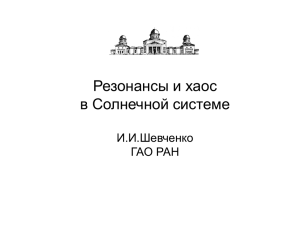
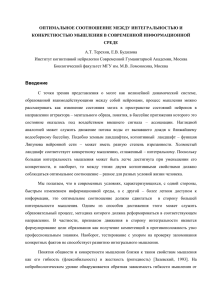
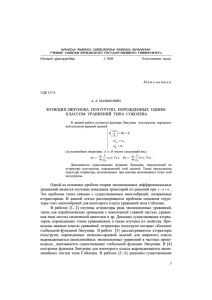
Квазиоптимальный по времени алгоритм проектирования аналоговых цепей Александр Михайлович Земляк НТУУ Киевский политехнический институт, Украина Автономный университет Пуэбла, Мексика Содержание • • • • • Введение Формулировка проблемы Квазиоптимальный алгоритм Основной критерий Выводы Введение Традиционные подходы к сокращению необходимого времени анализа системы разработаны досконально. Разработка алгоритма для наилучшей стратегии оптимизации является важнейшей задачей. В то же время требуется выработать критерий, позволяющий сравнивать различные стратегии оптимизации цепей с точки зрения числа операций без расчета самого времени. Оказалось полезным введение понятия функции Ляпунова процесса оптимизации. Была выявлена определенная корреляция между поведением функции Ляпунова для некоторой стратегии оптимизации цепи и ее полным процессорным временем Формулировка проблемы Новая формулировка проблемы. a) Модель системы: 1 u g X 0 j j j 1,2,..., M (1) b) Процедура параметрической оптимизации: X s1 X s t s H s где H s f F X s ,U s X ,U 1 Управляющий вектор: (2) F X , U C X X , U M 2 u g j j X j 1 U u1 , u2 ,..., uM uj 0;1 Непрерывная форма Процедура оптимизации: dxi f i X ,U dt i 1,2,..., N (3) j 1,2,..., M (4) Модель системы: 1 u g j j X 0 Дискретная форма Градиентный метод xis 1 xis t s f i X ,U i 1,2,..., K , K 1,...N 1 u g X 0 j где F X ,U xi F X ,U x i fi X ,U f i X ,U u i K 1 uiK xis i X ts где F X ,U C X (6) j 1,2,..., M j 1 M 2 u g j j X j 1 (5) i 1,2,..., K (7) i K 1, K 2,..., N Квазиоптимальный алгоритм Проблема минимального времени оптимизации коррелирована с более общей проблемой устойчивости траектории оптимизации. Известна идея для анализа устойчивости динамической системы на основе прямого метода Ляпунова. Процесс проектирования определен как динамическая управляемая система . Предполагается использовать функцию Ляпунова процесса проектирования для выявления оптимальной структуры управляющего вектора, в частности для поиска оптимальных точек переключения управляющих функций. Зададим функцию Ляпунова следующими формулами: F X , U V X , U xi i 2 V X , U F X , U r где F(X,U) обобщенная целевая функция процедуры оптимизации. Последняя формула применяется в случае положительной целевой функции равной нулю в оптимальной точке. (8) (9) Производная функия Ляпунова Надо минимизировать время переходного процесса динамической системы путем специального выбора функций правой части основной системы уравнений. • Необходимо изменить функции f i X , U путем выбора управляющего вектора U для достижения максимальной скорости уменьшения функции Ляпунова • Введем новую функцию, являющуюся нормированной производной функции Ляпунова: W V /V (10) Рис. 1. Односкадный усилитель Таблица 1. Зависимость процессорного времени от точки переключения для однокаскадного усилителя N Точка Число Процессорное перекл. итераций время, (сек) 1 33 2433 0,404 2 34 2180 0,361 3 35 1748 0,289 4 36 61 0,01 5 37 1705 0,281 6 38 2111 0,349 7 39 2349 0,389 Рис. 2. Поведение функций V(t) и W(t) в течение процесса оптимизации для семи последовательных значений номера шага точки переключения (с 147 до 267) Рис. 3. Алгоритм традиционной стратегии проектирования Рис. 4. Алгоритм модифицированной традиционной стратегии проектирования Fig. 5. Квазиоптимальный алгоритм Основной критерий Квазиоптимальная стратегия проектирования имеет выигрыш по времени более 600 раз Рис. 6. Трехкаскадный усилитель Новая функция P определена как разность значений функции W(t) для двух соседних кривых Fig. 7. W(t) для некоторых точек переключения Функция Q определена как дискретная производная функции P : Q=P(m+1) -P(m) Fig. 8. P и Q как функции номера кривой m Выводы • После идентификации оптимальных точек переключения управляющего вектора реализуется квазиоптимальная стратегия, соответствующая этим точкам. • Дополнительные затраты процессорного времени, связанные с поиском оптимальных точек переключения управляющего вектора, составляют от 1% до 40% полного времени реализации квазиоптимального алгоритма. • Учитывая тот факт, что квазиоптимальная стратегия позволяет получить общий выигрыш в процессорном времени по сравнению с традиционной стратегией оптимизации в несколько сот раз. • Можно утверждать, что квазиоптимальный алгоритм, т.е. практическая реализация квазиоптимальной стратегии, дает выигрыш такого же порядка.