Функция Ляпунова процесса проектирования
реклама

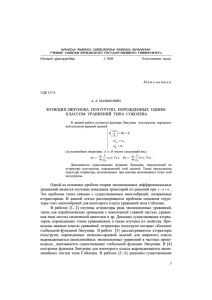
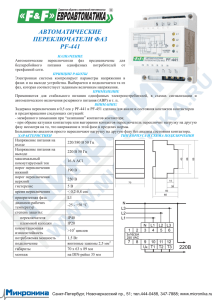
Структура управляющего вектора при оптимизации аналоговых цепей Александр Михайлович Земляк1,2 Татьяна Михайловна Маркина1 1НТУУ Киевский политехнический институт, Украина 2Автономный университет Пуэбла, Мексика Содержание • • • • • Введение Формулировка проблемы проектирования Функция Ляпунова процесса проектирования Структура оптимальной стратегии Выводы Введение Традиционные подходы к сокращению необходимого времени анализа системы разработаны досконально. Разработка алгоритма для наилучшей стратегии оптимизации является важнейшей задачей. В то же время требуется выработать критерий, позволяющий сравнивать различные стратегии оптимизации цепей с точки зрения числа операций без расчета самого времени. Оказалось полезным введение понятия функции Ляпунова процесса оптимизации. Была выявлена определенная корреляция между поведением функции Ляпунова для некоторой стратегии оптимизации цепи и ее полным процессорным временем Формулировка проблемы Новая формулировка проблемы. a) Модель системы: 1 u g X 0 j j j 1,2,..., M (1) b) Процедура параметрической оптимизации: X s1 X s t s H s где H s f F X s ,U s X ,U 1 Управляющий вектор: (2) F X , U C X X , U M 2 u g j j X j 1 U u1 , u2 ,..., uM uj 0;1 Непрерывная форма Процедура оптимизации: dxi f i X ,U dt i 1,2,..., N (3) j 1,2,..., M (4) Модель системы: 1 u g j j X 0 Функции f i X ,U для градиентного метода имеют вид: 1 M 2 C X u j g j X f i X , U b xi j 1 f i X , U b ui K xi 1 u i K dt i 1,2,..., K 1 M 2 C X u j g j X j 1 x ' i i X (5) i K 1, K 2,..., N Дискретная форма Градиентный метод xis 1 xis t s f i X ,U i 1,2,..., K , K 1,...N 1 u g X 0 j где F X ,U xi F X ,U x i fi X ,U f i X ,U u i K 1 uiK xis i X ts где F X ,U C X (7) j 1,2,..., M j 1 M 2 u g j j X j 1 (6) i 1,2,..., K (8) i K 1, K 2,..., N Функция Ляпунова процесса проектирования Какой критерий позволит найти оптимальный управляющий вектор U ? Известна идея для анализа устойчивости динамической системы на основе прямого метода Ляпунова. Процесс проектирования определен как динамическая управляемая система . Предполагается использовать функцию Ляпунова процесса проектирования для выявления оптимальной структуры управляющего вектора, в частности для поиска оптимальных точек переключения управляющих функций. Есть свобода определения функции неединственности задания этой функции. Ляпунова благодаря Давайте зададим функцию Ляпунова следующими формулами: F X , U V X , U xi i 2 V X , U F X , U r где F(X,U) обобщенная целевая функция процедуры оптимизации. Последняя формула применяется в случае положительной целевой функции равной нулю в оптимальной точке. (9) (10) Структура оптимальной стратегии Надо минимизировать время переходного процесса динамической системы путем специального выбора функций правой части основной системы уравнений. • Необходимо изменить функции f i X , U путем выбора управляющего вектора U для достижения максимальной скорости уменьшения функции Ляпунова • Введем новую функцию, являющуюся нормированной производной функции Ляпунова: W V /V (11) Примеры Рис. 1. Нелинейная пассивная цепь с двумя узлами Таблица 1. Зависимости процессорного времени от точки переключения для схемы с двумя узлами N Точка Число Процессорное перекл. итераций время, (сек) 1 147 8319 0,221 2 167 6501 0,172 3 187 3697 0,096 4 207 2860 0,073 5 227 3383 0,087 6 247 5429 0,142 7 267 6682 0,175 Рис. 2. Процессорное время проектирования как функция точки переключения, соответствующей шагу n процесса оптимизации Рис. 3. Поведение функций V(t) и W(t) в течение процесса оптимизации для семи последовательных значений номера шага точки переключения (с 147 до 267) Рис. 4. Поведение функций V(t) и W(t) в течение начального интервала процесса оптимизации Рис. 5. Односкадный усилитель Таблица 2. Зависимость процессорного времени от точки переключения для однокаскадного усилителя N Точка Число Процессорное перекл. итераций время, (сек) 1 33 2433 0,404 2 34 2180 0,361 3 35 1748 0,289 4 36 61 0,01 5 37 1705 0,281 6 38 2111 0,349 7 39 2349 0,389 Рис. 6. Поведение функций V(t) и W(t) в течение процесса оптимизации для семи последовательных значений номера шага точки переключения (с 147 до 267) Рис. 7. Двухкаскадный усилитель Таблица 3. Зависимость процессорного времени от точки переключения для двухкаскадного усилителя N Точка Точка Число Процессорное перекл. 1 перекл. 2 итераций время, (сек) 1 7 8 4900 9,91 2 8 9 4486 9,11 3 9 10 3785 7,69 4 10 11 1354 2,74 5 11 12 3618 7,34 6 12 13 4424 8,98 7 13 14 4882 9,89 Рис. 8. Поведение функций V(t) и W(t) в течение процесса проектирования для семи последовательных значений номера первой точки переключения (с 7 до 13) Рис. 9. Трехкаскадный усилитель Таблица 4. Зависимость процессорного времени от точки переключения для трехкаскадного усилителя N Точка Точка Число Процессорное перекл. 1 перекл. 2 итераций время, (сек) 1 10 16 8187 154,31 2 11 17 7432 140,04 3 12 18 6125 115,36 4 13 19 2087 39,14 5 14 20 10259 193,33 6 15 21 11610 218,82 7 16 22 12372 233,16 Рис. 10. Поведение функций V(t) и W(t) в течение процесса проектирования для семи последовательных значений номера первой точки переключения (с 10 до 16) Выводы • Опираясь на характеристики функции Ляпунова, возможно провести детальный анализ свойств различных стратегий оптимизации электронных цепей. • Получение оптимальных точек переключения управляющего вектора является составным элементом квазиоптимального по времени алгоритма оптимизации цепей наряду с открытым ранее эффектом сверхускорения процесса оптимизации и адекватным выбором начальной точки процесса оптимизации. • Введение функции W, являющейся нормированной временной производной функции Ляпунова, и исследование поведения этой функции позволило адекватно проанализировать и сравнить поведение основных характеристик процесса оптимизации электронных цепей. • Оптимальные точки переключения получены на основе анализа поведения производной функции Ляпунова при последовательном сдвиге точки переключения управляющего вектора в процессе анализа.