АЛГОРИТМ и Формулы В АЛГx
реклама

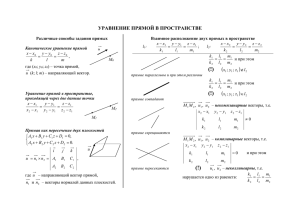
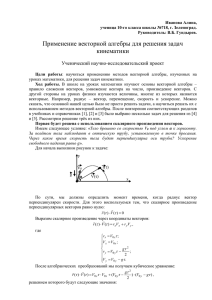
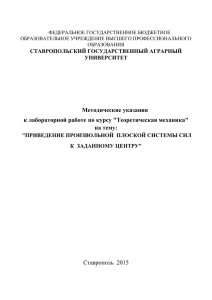
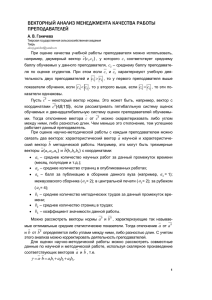
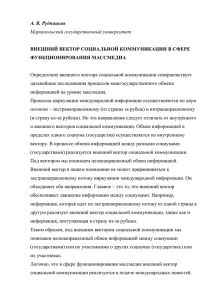
АЛГОРИТМ ПРИЛОЖЕНИЯ ВЕКТОРНОЙ АЛГЕБРЫ К РЕШЕНИЮ ЗАДАЧ АНАЛИТИЧЕСКОЙ ГЕОМЕТРИИ I.Выбор подходящей системы координат, запись данных задачи в координатной форме, М(x,y,z) - общая точка пространства. II. Перевод данных задачи в векторную форму. III. Запись условия задачи в векторной форме с помощью символов: , , , и т.п. IV. Переход от символьной записи условия задачи к векторным равенствам. V. Замена векторных равенств координатными. VI. Проверка соответствия исходныx данныx полученному результату. Пример. Получить параметричесие и канонические уравнения прямой l, проходящей через точки А и В. I. Пусть в декартовой системе координат точки А, В и общая точка пространства М имеют координаты: A x A , y A , z A B x B , y B , z B и М(x,y,z). II. За направляющий вектор l прямой l АВ можно принять вектор A B xB x A , yB y A , z B z A m , n , p и A M x x A , y y A , z z A вектор с началом в точке А. III. Если точка М(x,y,z)- общая точка прямой l, то векторы A B и A M коллинеарные векторы, то есть A M A B . IV. Условие коллинеарности A M A B эквивалентно векторному равенству: A M =t A B , где параметр t определяет положение точки М на прямой относительно точек А и В. V. Векторное уравнение x x A , y y A , z z A =t m , n , p равносильно системе трёх координатных уравнений: x x A t m, x x A t m, y y A t n , то есть y y A t n , - искомые параметричекие уравнения z z t p, z z t p. A A x xA y yA z z A . прямой АВ. Или из A M A B следует, что m n p VI. Проверка. M t t 0 A , M t t 1 B. . A. Sukhotin, HM, TPU, 2010 ОСНОВНЫЕ ФОРМУЛЫ ВЕКТОРНОЙ АЛГЕБРЫ I. A B xB x A , yB y A , z B z A , a x a i y a j z a k x a , y a , z a xa t xb , x y z II. a b a tb ya t yb , a a a t xb y b z b z t z . b a III. a , b a b a b cos a ^ b x a x b y a y b z a z b , a b a b 0 , a b 0 x a xb y a y b z a z b 0 a a a a x a x a y a y a z a z a , Пра b b cos a ^ b cos a ^ b ab a , ab ,. ab c ab sin a^ b S ab , IV. c a b a , b c a , b c , a , b , c правая тройка векторов.. i j k c xa y a z a . xb y b z b S ABCD mod AB AC xa y a z a V. a b , c = a , b c , a b , c a b c a b c = xb yb zb , xc y c z c c aa b a b c =0, a b c Vabc V ABCS = 1 6 AB AC AS .