ЗАДАЧА НАБЛЮДЕНИЯ
advertisement

Глава 6
ЗАДАЧА НАБЛЮДЕНИЯ
6.1. Синтез наблюдателей полного порядка
Реализация закона управления, организованного по принципу обрат
ной связи по состоянию, требует обязательного измерения всех ком
понент вектора состояний. В действительности же «на борту» объекта
управления, как правило, имеются измерители лишь части компо
нент этого вектора.
Вот почему в обратную связь вместо вектора состояний заводится
лишь некоторая оценка этого вектора, формируемая наблюдателем
полного порядка, т.е. полные уравнения движения САУ имеют вид:
[P(x,t)]x + [B(x,t)]u, x ∈ Rn, u ∈ Rm,
y = [D(x,t)]x, y ∈ Rr,
•
x¯ = [P(x¯,t)]x¯ + [B(x¯,t)]u + [G(x¯,t)][y – D(x¯,t)x¯],
u = [CT(x–,t)]x¯, x¯ ∈ Rn.
•
x=
(6.1)
(6.2)
(6.3)
(6.4)
Здесь x — обозначает вектор состояний объекта управления; x– —
вектор состояний наблюдателя полного порядка; y — вектор измере
ний; u — вектор управлений; [P(x,t)], [B(x,t)], [G(x¯,t)], [D(x,t)],
[B(x¯,t)], [D(x¯,t)] — заданные функциональные матрицы соответству
ющих размеров.
Использованию в законе управления (6.4) вектора состояний на
блюдателя x¯ ТС обязана принципу разделения. Существо этого прин
ципа состоит в следующем: если систему уравнений (6.1)—(6.4) пере
писать в векторноматричной форме
(6.5)
134
Глава 6. Задача наблюдения
и выполнить замену переменных в соответствии с выражением
,
(6.6)
в котором введены обозначения
,
то математическую модель (6.5) можно представить в виде
.
Из полученных уравнений видно, что при x = x¯ они обращаются в
уравнения
,
(6.7)
.
Последнее из них известно под названием уравнения асимптоти
ческой оценки, где вектор e представляет собой вектор ошибки вос
становления вектора состояний x.
Факт преобразования системы (6.5) к системе (6.7) дает основание
обратную связь в объекте управления, рассчитанную для x, заменять
управлением по x¯, отдельно рассчитывая матрицу G(x,t) искомых па
раметров наблюдателя, исходя из соображений асимптотической ус
тойчивости по А.М. Ляпунову второго из уравнений (6.7), так как
только при e → 0n имеет место x → x¯.
В основе синтеза матрицы G(x,t) параметров наблюдателя лежит
двойственность задач управления и наблюдения.
Суть двойственности состоит в том, что асимптотическая устойчи
вость второго из уравнений (6.7) влечет за собой и асимптотическую
устойчивость уравнения
•
z = [PT(x,t) – DT(x,t)GT(x,t)]z,
(6.8)
отличающегося от первого уравнения тем, что матрицы, его опреде
ляющие, являются транспонированными по отношению к матрицам
первого уравнения.
6.1. Синтез наблюдателей полного порядка
135
Тем самым, систему (6.8) можно рассматривать как полученную
замыканием объекта управления
•
z. = [PT(x,t)]z + [DT(x,t)]v,
(6.9)
регулятором
v = [GT(x,t)]z,
(6.10)
что дает основание задачу наблюдения свести к задаче стабилизации
объекта (6.9).
Продемонстрируем методику синтеза наблюдателя полного поряд
ка, предназначенного для восстановления линейных скоростей абсо
лютно твердого тела по результатам измерения угловых скоростей.
Пример 6.1 — восстановление линейных скоростей абсолютно
твердого тела по результатам измерения угловых скоростей в услови
ях зависимости моментов сил от линейных скоростей.
Итак, рассмотрим движение свободного абсолютно твердого тела в
связанной системе координат (ССК), являющейся главной централь
ной системой, неизменно связанной с твердым телом, описываемое
уравнениями Эйлера в форме Коши [8]:
(6.11)
Эта система с помощью функциональных матриц допускают век
торноматричное представление
где
136
Глава 6. Задача наблюдения
Здесь х — вектор состояний; F — вектор внешних воздействий; m —
величина массы тела; Vx , Vy , Vz — проекции вектора скорости цент
ра масс на оси ССК; ωx, ωy, ωz — проекции вектора угловой скорости
на оси ССК; Ix, Iy, Iz — моменты инерции тела относительно главных
осей ССК; Rx ,Ry ,Rz — проекции главного вектора сил на оси ССК;
Mx, My, Mz — проекции вектора главного момента на оси ССК; t —
время; [P(x,t)] — функциональная матрица, определенная на решени
ях уравнения (6.11).
Будем полагать, что измерению доступны лишь угловые скорости
ωx, ωy, ωz, введя в рассмотрение следующее уравнение:
Y = Dx, y ∈ R3,
(6.13)
где y=col[ωx, ωy, ωz] — вектор измерений; D = [Θ3, E3] — блочная ма
трица параметров измерителей.
Поскольку функциональная матрица [P(x,t)] в уравнении (6.12) за
висит только от вектора измерений y, то это уравнение можно перепи
сать в виде
x• = [P(y,t)]x + F, x ∈ R6, F ∈ R6,
(6.14)
а уравнение (6.9) — в виде
z• = [PT(y,t)]z + DTv.
(6.15)
Будем решать задачу синтеза наблюдателя полного порядка, поз
воляющего восстановить линейные скорости абсолютно твердого те
ла по результатам измерения угловых скоростей как задачу синтеза
приводимых систем в отношении уравнения (6.15).
137
6.1. Синтез наблюдателей полного порядка
Необходимое и достаточное условие разрешимости этой задачи со
стоит в полной управляемости пары [PT(y, t)], DT или в выполнении
условия
rank[DT, ΞDT] = 6,
(6.16)
где Ξ — дифференциальный оператор вида
Ξ = [PT(y,t)] – E6 d/dt(•).
Матрица [PT(y,t)] имеет блочную форму
(6.17)
с блоками Pij (I,j = 1,2) размера 3×3, определяемыми равенствами
,
.
Подставляя (6.17) в (6.16), получим матрицу управляемости
(6.18)
с рангом, равным трем, что означает неуправляемость объекта (6.15).
Из (6.18) следует, что условие полной управляемости состоит в выпол
нении неравенства
detP12 ≠ 0.
(6.19)
Поэтому для удовлетворения этого условия можно использовать
то, что правые части уравнений объекта и наблюдателя не изменятся,
если к ним прибавить Фх – Фх и Фх– – Фх–, соответственно, где Ф —
заданная матрица чисел
(6.20)
138
Глава 6. Задача наблюдения
с блоком чисел P12, удовлетворяющим условию (6.19). Результатом
прибавления будет следующая система уравнений объекта и наблюда
теля:
(6.21)
,
,
(6.22)
где [P1(y,t)] = {P(y,t)] + Ф, F1 = F – Фх, F1– = F – Фх¯. При этом чле
ны –Фх и –Фх¯ будем трактовать как слагаемые векторов внешних
воздействий F1 и F1, соответственно, получив уравнение асимптоти
ческой оценки в виде
,
(6.23)
что дает основание вместо уравнения (6.15) рассматривать уравнение
(6.24)
с полностью управляемой парой [P1T(y,t)], DT.
Следует отметить, что присутствие в правой части (6.23) члена F1 –
F1 приводит к появлению методической ошибки в векторе ошибки
восстановления, порожденной реакцией на эти слагаемые. Избавить
ся от этой ошибки можно лишь в случае, когда слагаемые трех послед
них компонент вектора внешних воздействий F содержат члены, ли
нейно зависящие от скоростей Vx, Vy, Vz, т.е. если вектор F допускает
представление
.
Тогда, если detΨ21 ≠ 0, то включение блока Ψ21 в матрицу параме
тров объекта управления
позволяет достичь полной управляемости пары [P1T(y,t)], DT.
Удовлетворив условию (6.16), приведем систему (6.24) к блочной
форме Фробениуса, для чего, используя технологию главы 3, постро
им гомеоморфное преобразование вектора состояний z сначала к
форме КрыловаЛюенбергера, а затем к форме Фробениуса.
Результатом приведения к форме КрыловаЛюенбергера будут
следующие коэффициенты А.Н. Крылова, представляющие собой
блоки размера 3×3
139
6.1. Синтез наблюдателей полного порядка
,
что позволяет искомые блоки [αi(y,t)] (i =1,2) блочной формы Фробе
ниуса найти в виде
,
(6.25)
.
Для того, чтобы система (6.25) была системой с постоянными ко
эффициентами и, как следствие, исходная система (6.26) была приво
димой, необходимо закон управления системой в форме Фробениуса
представить в виде
u = [GT(y,t)]s = [α2(y,t) – β2E3 α1(y,t) – β1E3]s
(здесь β1 > 0, β2 > 0— заданные коэффициенты минимального много
члена приведенной системы λ2 + β1λ + β2 = 0).
Последующий переход от формы Фробениуса к форме Крылова
Люенбергера, а затем к исходной системе с матрицами перехода, най
денными в результате обратного перехода (от исходной системы к
форме КрыловаЛюенбергера, а затем к форме Фробениуса) позволят
получить закон управления исходной системой.
Пример 6.2 — восстановление линейных скоростей одномоторного
самолета. Применим описанную в примере 6.1 методику для восста
новления линейных скоростей одномоторного самолета, уравнения
движения которого с дозвуковой скоростью в невозмущенной атмо
сфере имеют вид [8]
140
Глава 6. Задача наблюдения
(6.26)
где
q = 0.5ρV2 — скоростной аэродинамический напор1;
ρ — плотность воздуха;
— модуль вектора линейной скорости;
— угол скольжения;
ν — угол тангажа;
γ — угол крена;
δрв — угол отклонения руля высоты;
δрн— угол отклонения руля направления;
δэ— угол отклонения элеронов;
Р — тяга двигателя;
— аэродинамические эффекты;
S — площадь крыльев в плане;
l — размах крыльев;
ba — средняя аэродинамическая хорда крыла;
Kдв — суммарный момент количества движения вращающихся ча
стей двигателя;
ϕ — угол между направлением тяги и осью ОХ ССК;
g — ускорение свободного падения;
1 Термин, используемый в динамике полета.
6.1. Синтез наблюдателей полного порядка
141
— угол атаки.
При записи уравнений (6.26) в векторноматричной форме (6.21) с
вектор внешних воздействий F1 можно представить в виде
, где
— составляющая, компоненты которой содержат
аэродинамические коэффициенты, зависящие от восстанавливаемых
линейных скоростей;
— составляющая, не содержащая таких ко
эффициентов:
В предположении измеримости углов ϕ, β, α, ν, γ, δрв, δрн, δэ реа
лизация вектора
— в составе наблюдателя может быть вычислена с
точностью до погрешности измерения углов ϕ, ν, γ, в то время как ре
ализация
— может быть вычислена лишь приближенно по резуль
татам восстановления линейных скоростей. При этом методическая
ошибка восстановления линейных скоростей Vx, Vy, Vz будет опреде
ляться разностью векторов и , т.е. вектором
, компо
ненты которого имеют вид
142
Глава 6. Задача наблюдения
(6.27)
где
.
Из (6.27) видно, что при V → V¯ имеет место ∆F1 → 0. Тем самым ме
тодическая погрешность восстановления линейных скоростей, пред
ставляющая собой сумму свободной и вынужденной составляющих
решения уравнения (6.23), будет иметь конечную величину, поскольку
свободная составляющая стремится к нулю по построению, а вынуж
денная составляющая от асимптотически устойчивой по А.М. Ляпуно
ву системы от исчезающего внешнего воздействия — ограничена.
Искомую матрицу параметров наблюдателя получим в виде
[G(y,t)] =
. (6.28)
6.1. Синтез наблюдателей полного порядка
143
Численное интегрирование уравнений движения самолета и син
тезированного наблюдателя полного порядка с матрицей параметров
(6.28) проведено для следующих значений аэродинамических коэф
фициентов и массогабаритных параметров, принятых постоянными:
Моделирование проводилось при отсутствии внешних воздейст
вий в предположении, что как самолет, так и наблюдатель подверже
ны только возмущениям начальных условий, которые были приняты
равными
x(t0) = col[159.11 –13.76 2.13 0 0 0],
x¯(t0) = col[157.30 –27.73 0.3 0 0 0].
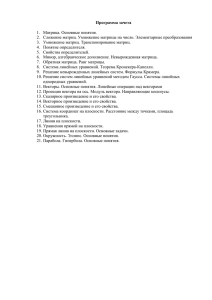
Результаты моделирования (кроме изменения во времени ошибок
восстановления линейных скоростей самолета (e1 = Vx – Vx,e2 = Vy –
Vy,e3 = Vz – Vz)) приведены на рис. 6.1, из которого видно, что ошиб
ка восстановления скорости Vx стремится к нулю, а установившиеся
ошибки восстановления скоростей Vy, Vz малы настолько, что модуль
вектора скорости, рассчитанный по восстановленным значениям ли
нейных скоростей
, отличается от истинного значе
ния модуля вектора скорости
лишь на десятые доли
процента.
Рис. 6.1
144
Глава 6. Задача наблюдения
6.2. Наблюдение параметров математической модели —
задача идентификации
Все предыдущее изложение проводилось в предположении, что мате
матическая модель объекта (явления) является заданной (или извест
ной). Однако такое бывает не всегда.
Рассмотрим систему, изображенную на рисунке В.1. Пусть матема
тическая модель объекта управления неизвестна, но вход u и выход z
доступны измерению. Кроме того, будем полагать, что вход и выход
связаны следующим разностным уравнением в форме входвыход
z[n] + α1z[n – 1] + α2z[n – 2] + … + αn–1z[1] + αnz[0] = u[0]
с неизвестными параметрами αi (i = 1,n—).
Определение 6.1. Задача нахождения неизвестных параметров
αi (i = 1,n) носит название задачи идентификации.
Известны самые различные постановки этой задачи. Мы рассмот
рим простейшую из них, когда вход и выход доступны точным изме
рениям. Для отыскания неизвестных параметров составим следую
щую систему n разностных уравнений
z[n] + α1z[n – 1] + α2z[n – 2] + …………. + αn–1z[1] + αnz[0] = u[0],
z[n + 1] + α1z[n] + α2z[n – 1] + …………. + αn–1z[2] + αnz[1] = u[1],
…………………………………………………………………………..
z[2n – 2] + α1z[2n –3] + α2z[2n – 4] + … + αn–1z[n – 1] + αnz[n – 2] = u[n – 2],
z[2n – 1] + α1z[2n –2] + α2z[2n – 3] + … + αn–1z[n] + αnz[n – 1] = u[n – 1]
Запишем эту систему в векторноматричной форме
Zα¯ = R,
где
,
.
Нетрудно видеть, что матрица Z является теплицевой, т.е. матрицей
у которой по всем диагоналям, параллельным главной, включая глав
ную, расположены одинаковые элементы. Как следствие, эта матрица
6.1. Синтез наблюдателей полного порядка
145
невырождена, что позволяет однозначно найти искомые параметры
идентифицируемой модели в виде
α¯ = Z–1R.
ВЫВОДЫ
Таблица 6.1
Азбука задачи наблюдения
№
Алфавит
п/п
1 Исходные
данные
Содержание
1. Уравнения движения объекта управления
•
x = [P(x,t)]x
+ [B(x,t)]u, x ∈ Rn, u ∈ Rm.
2. Уравнение измерителей
y = Dx.
3. Уравнение наблюдателя полного порядка
•
x¯ = [P(x¯,t)]x¯ + [B(x¯,t)] + [G(x¯,t)][y – D(x¯,t)x¯].
4. Закон управления
u = [CT(x¯,t)]x¯, x¯ ∈ Rn.
2 Принцип раз После записи исходных данных в векторноматричной форме
деления
выполняется замена переменных
,
где
(здесь е — ошибка восстановления вектора состояний), в резуль
тате которой объект принимает вид
•
x = [P(x,t) + B(x,t)CT(x–,t)]x – [B(x,t)CT(x¯,t)]e,
•
e = [P(x¯,t) + {B(x¯,t) – B(x,t)}CT(x¯,t) – G(x¯,t)D(x¯,t)]e + {[P(x,t) —
– P(x¯,t)] + [B(x,t) – B(x¯,t)]CT(x¯,t) + G(x¯,t)[D(x,t) – D(x¯,t)]}x,
откуда следует при x = x¯
•
x = [P(x,t) + B(x,t)CT(x,t)]x – B(x,t)CT(x¯,t)]e,
•
e = [P(x,t) – G(x,t)D(x,t)]e.
Последнее уравнение называется уравнением асимптотической
оценки.
3 Двойствен
Асимптотическая устойчивость по А.М. Ляпунову уравнения
ность задач
асимптотической оценки влечет за собой асимптотическую ус
стабилизации тойчивость уравнения
и наблюдения z = [PT(x,t) – DT(x,t)GT(x,t)z,
146
Глава 6. Задача наблюдения
№
п/п
Алфавит
Содержание
которое можно рассматривать как замкнутую систему, получен
ную замыканием объекта управления
•
z = [PT(x,t)]z + [DT(x,t)]v
регулятором
v = [GT(x,t)]z.
Таблица 6.2
Перечень рассмотренных моделей
№ п/п
Модель
6.1
Абсолютно твердое тело
6.2
Одномоторный самолет
ЗАДАЧИ
6.1. Решите задачу синтеза наблюдателя полного порядка в отно
шении объектов управления, приведенных в задачах главе 3 (зада
чи 3.1—3.9) в предположении, что измерению доступны следующие
компоненты вектора состояний y = x1.