СИНТЕЗ ДИНАМИЧЕСКИ УРАВНОВЕШЕННЫХ
реклама

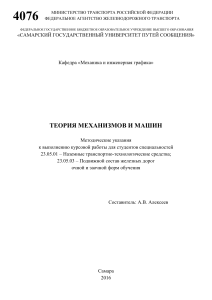
Труды Одесского политехнического университета, 2005, вып. 2(24) 19 Р.В. Амбарцумянц, д-р техн. наук, проф., С.В. Тутаев, магистр, Одес. нац. акад. пищевых технологий УДК 621.01:621.83 СИНТЕЗ ДИНАМИЧЕСКИ УРАВНОВЕШЕННЫХ ДВУХКОЛЕСНЫХ МЕХАНИЗМОВ Р.В. Амбарцумянц, С.В. Тутаєв. Синтез динамічно врівноважених двоколісних механізмів. Запропоновано конструкцію динамічно врівноваженого двоколісного зубчасто-важільного механізму, що дозволяє розвантажити від радіального навантаження вхідний і вихідний вали, передавати велику потужність при мінімальних габаритах. Виконано його кінематичний синтез за заданою передаточною функцією. R.V. Ambartsumyants, S.V. Tutayev. Synthesis of dynamically-balanced two-geared drives. The design of dynamically-balanced two-geared linkage mechanism allowing to unload the input and output shafts from radial forces, to transfer big power at minimal dimensions is suggested. Its kinematic synthesis according to the given transmission function is performed. При проектировании различных машин-автоматов, конвейеров и др. большую роль играют механизмы с неравномерным движением ведомого звена и, как частный случай, механизмы с остановками. В качестве таких механизмов наиболее широко используются кулачковые и мальтийские механизмы [1, 2]. Кулачковые механизмы обладают рядом существенных недостатков — малой износостойкостью; неспокойной работой вследствие вибрации в машинах с большой частотой вращения ведущего вала; повышением угла давления в кинематической паре кулачок-коромысло с увеличением мгновенного передаточного отношения [3]. В мальтийских механизмах существенным недостатком является наличие мягких ударов при входе цевок в пазы, повышенный износ пары цевка — паз. Опорные подшипники в кулачковых и мальтийских механизмах загружены радиальными нагрузками, что приводит к понижению их долговечности. В качестве передаточных механизмов, в частности механизмов периодического поворота, применяются также рычажные и зубчато-рычажные механизмы [4, 5]. Несмотря на наличие в зубчато-рычажных механизмах высших кинематических пар, образованных зубчатыми колесами, они все же предпочтительнее кулачковых механизмов, поскольку технология изготовления и ремонта зубчатых колес проще, чем кулачков, и более предпочтительны по своим функциональным возможностям, чем рычажные механизмы. Однако широкому их внедрению препятствуют низкие динамические свойства из-за наличия больших неуравновешенных масс. Их уравновешивание на фундаменте зачастую не дает положительного эффекта из-за повышения значения реакций в кинематических парах. Поэтому представляет интерес создание на этапе структурного синтеза динамически уравновешенной схемы зубчато-рычажного механизма с возможностью передачи больших мощностей и выполнение его кинематического синтеза по заданной передаточной функции. Предложена принципиальная схема динамически уравновешенного зубчато-рычажного механизма (рис. 1). Центральное колесо 1 является неподвижным. Водило H, вращающееся вокруг неподвижной оси, входит во вращательную пару с сателлитами 2, с которыми жестко связаны кривошипы 2', образующие вращательные пары с шатунами 3. Шатуны 3 образуют вращательную пару с выходным звеном 4, расположенным соосно с водилом. При вращении водила H сателлиты 2 обкатываются по центральному колесу 1, а центр шарнирного соединения звеньев 2', 3 перемещается по траектории, имеющей вид эпициклоиды. Кривошипы 2' передают через шатуны 3 движение выходному звену 4. Если указанный центр шарнирного соединения 2', 3 находится за начальной окружностью сателлита, то выходное звено совершает пилигримовое движение. 20 Труды Одесского политехнического университета, 2005, вып. 2(24) Динамическая уравновешенность обеспечивается равномерным распределением по периметру неподвижного колеса нескольких сателлитов и такого же количества дополнительных кинематических цепей. Такое конструктивное выполнение позволяет перераспределить общий поток мощности на несколько потоков, которые передаются через кривошипы и шатуны на ведомый вал, где и суммируются автоматически. Основными параметрами, определяющими геометрию предложенной схемы механизма, являются: a, b, c — относительные длины звеньев 4, 5 и 6, соответственно, при условии, что длина водила H принята равной единице; φН0, φ40, φ20 — начальные углы поворота соответствующих звеньев; i12H — передаточное отношение зубчатой пары 1, 2 при условно неподвижном водиле. Как правило, при синтезе передаточных механизмов заданной является функция положения механизма в виде j4 =j4 (jН ) , jН 0 £ jH £ jНm , Рис. 1. Структурная схема динамически уравновешенного двухколесного механизма (1) где φ4, φH — углы поворота выходного звена 4 и водила, соответственно; φH0, φHm — граничные значения аргумента. Для определения геометрических размеров механизма представим его в виде векторов (рис. 2). Рассмотрим замкнутый контур OABCO. Векторное уравнение замкнутости контура имеет вид 1+ a = c + b . (2) Сгруппировав векторное уравнение (1) и возведя его в квадрат для взвешенной разности [2], получим D q= b 2 - 1 - a 2 - c 2 - 2a cos(j H + j H 0 - j2 - j 20 ) + 2c cos(j H + j H 0 - j4 - j 40 ) + 2ac cos b , (3) где β — угол между векторами a и c . Значение этого угла определяем из выражения b = j4 + j40 - [(1 - i12H )j H + j20 ] . При синтезе рассматриваемого механизма возможны два случая. 1. Требуется обеспечить заданную функцию положения механизма (1) с заданным числом циклов z за один оборот входного звена, причем как входное, так и выходное звенья должны быть кривошипами. 2. Требуется обеспечить заданную функцию положения (1) без каких-либо ограничений. Первый случай. Заданное число циклов движения выходного звена предопределяет передаточное отношение зубчатой передачи d 1 i12H = 2 = . d1 z d 2 + d1 = 1 , то совмест2 ным решением последних двух уравнений получим Поскольку принято Рис. 2. Расчетная схема механизма d1 = 2z ; z +1 d2 = 2 . z +1 Труды Одесского политехнического университета, 2005, вып. 2(24) 21 Второй случай. Поскольку на схему не наложены дополнительные ограничения, то в число вычисляемых параметров может быть включено также передаточное отношение i12H . В такой постановке задачи ее решение не отличается от решения задачи для первого случая, поэтому приводится общее для этих случаев решение. Для вычисления трех линейных параметров a, b, c выражение (3) запишем в виде Dq é b 2 - 1 - a 2 - c 2 cos(i12H jH + j H 0 - j20 ) cos(j H + j H 0 - j 4 - j40 ) -= + + 2ac ê c a 2ac ë + cos[j 4 + j40 - ((1 - i12H (4) )j H + j20 )]. На основании (4), при условии использования метода интерполирования функций составим систему уравнений ì P0 + P1 f11 (j) + P2 f 21 (j) + F1 (j) = 0, ï í P0 + P1 f12 (j) + P2 f 22 (j) + F2 (j) = 0, ï P + P f (j) + P f (j) + F (j) = 0, 2 23 3 î 0 1 13 (5) b2 - 1 - a 2 - c 2 1 1 , P1 = , P2 = — постоянные коэффициенты, в которые входят иско2ac c a мые параметры; f1j(φ), f2j(φ) — линейно независимые непрерывные функции аргумента φ, несодержащие неизвестных параметров (j=1, 2, 3); где P0 = f1 j = - cos(i12H j H + j H 0 - j20 ) , f 2 j = cos(jH + j H 0 - j4 - j40 ) ; F j = cos[j4 + j40 - ((1 - i12H )j H + j 20 )] . Следует отметить, что на интервале приближения необходимо учитывать условие неразрывности цепи ìc - b > 1 - a , í î1 + a < c + b. Путем преобразования выражения (3) можно получить полиномы для вычисления четырех, пяти и шести параметров. Получить выражение для вычисления передаточного отношения i12H не всегда возможно, поскольку оно находится под знаком тригонометрической функции, а такие функции не всегда удается раскрывать. На основании полученных результатов можно заключить: — Для повышения надежности и долговечности современных машин и механизмов целесообразно на этапе их структурного синтеза разрабатывать такие схемы, которые были бы динамически уравновешенными независимо от результатов кинематического синтеза. — Представленный зубчато-рычажный механизм имеет большие функциональные возможности, он позволяет воспроизвести закон движения выходного звена как за неполный оборот входного звена, так и за несколько его оборотов, а также получить выстой ведомого звена с обратным ходом (пилигримовое движение) и без него. — Наличие большого числа параметров схемы механизма позволяет получить высокую точность приближения заданной и воспроизводимой функции. Литература 1. Фролов К.В. Теория механизмов и машин: Учеб. для втузов / К.В. Фролов, С.А. Попов, А.К. Мусатов и др. — М.: Высш. шк., 1987. — 496 с. 22 Труды Одесского политехнического университета, 2005, вып. 2(24) 2. Артоболевский И.И. Синтез плоских механизмов / Артоболевский И.И., Левитский Н.И., Черкудинов С.А. — М.: Гос. издат. физ.-мат. лит., 1959. — 1084 с. 3. Кенигсберг Э.В. Некоторые вопросы анализа и синтеза пятизвенного зубчато-рычажного механизма с приближенным выстоем ведомого звена // Изв. вузов. Машиностроение, 1972. — № 9. — С. 43 — 50. 4. Шашкин А.С. Зубчато-рычажные механизмы. — М.: Машиностроение, 1971 — 192 с. 5. Амбарцумянц Р.В. К вопросу о воспроизведении зубчато-рычажным механизмом движения точки по циклическим кривым // Механика машин. — 1980. — № 57. — С. 85—89. Поступила в редакцию 18 июля 2005 г.