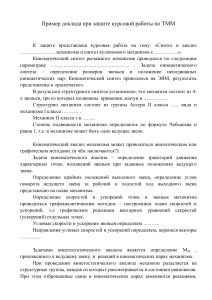
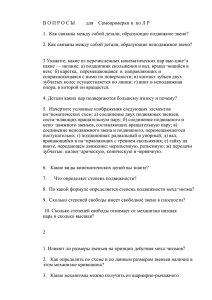
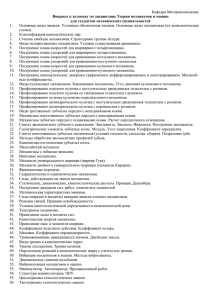
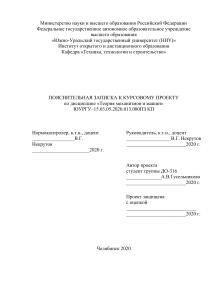
4076 МИНИСТЕРСТВО ТРАНСПОРТА РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ «САМАРСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ» Кафедра «Механика и инженерная графика» ТЕОРИЯ МЕХАНИЗМОВ И МАШИН Методические указания к выполнению курсовой работы для студентов специальностей 23.05.01 – Наземные транспортно-технологические средства; 23.05.03 – Подвижной состав железных дорог очной и заочной форм обучения Составитель: А.В. Алексеев Самара 2016 1 УДК 621.81(075.8) Теория механизмов и машин : методические указания к выполнению курсовой работы для студентов специальностей 23.05.01 – Наземные транспортнотехнологические средства; 23.05.03 – Подвижной состав железных дорог очной и заочной форм обучения / составитель : А.В. Алексеев. – Самара : СамГУПС, 2016. – 79 с. В методических указаниях подробно рассматриваются этапы выполнения курсовой работы по дисциплине «Теория механизмов и машин». Приводятся расчеты и графические построения, выполняемые студентами при синтезе и анализе простейших типов механизмов. Методические указания предназначены для студентов специальностей 23.05.01 – Наземные транспортно-технологические средства и 23.05.03 – Подвижной состав железных дорог очной и заочной форм обучения. Утверждены на заседании кафедры «Механика и инженерная графика», протокол № 10 от 18.05.2016 г. Печатаются по решению редакционно-издательского совета университета. Составитель: к.т.н., доцент А.В. Алексеев Рецензенты: к.т.н., доцент кафедры «Строительные, дорожные машины и технологии машиностроения» СамГУПС В.А. Кожевников; к.т.н., доцент кафедры «Механика и инженерная графика» СамГУПС С.В. Путилин Под редакцией составителя Подписано в печать 05.09.2016. Формат 60х90 1/16. Усл. печ. л. 4,94. Заказ 158. © Самарский государственный университет путей сообщения, 2016 2 ОГЛАВЛЕНИЕ ВВЕДЕНИЕ………………….…………………………….……………………………...........4 СОДЕРЖАНИЕ КУРСОВОЙ РАБОТЫ…………………………………………………..…6 1. СИНТЕЗ И АНАЛИЗ ПЛОСКОГО ЧЕТЫРЕХЗВЕННОГО ШАРНИРНО-РЫЧАЖНОГО МЕХАНИЗМА……………..……………………...... 7 1.1 Кинематический синтез механизма …………………………………………….…… 8 1.2 Структурный анализ……………………………………………………………...…... 20 1.3 Кинематический анализ механизма……………………………………………….… 22 1.4 Построение кинематических диаграмм движения выходного звена механизма от угла поворота кривошипа. Анализ полученных диаграмм…………………….. 36 1.5 Кинетостатический анализ механизма…………………………………………...…. 44 2. СИНТЕЗ КУЛАЧКОВОГО МЕХАНИЗМА………………………………………… 56 2.1 Построение кинематических диаграмм аналога ускорения, аналога скорости и перемещение выходного звена в функции угла поворота кулачка ………………………………………………………………. 56 2.2 Определение минимального радиуса кулачка. Построение диаграммы изменения углов давления при работе кулачкового механизма.…..…. 67 2.3 Построение профиля кулачка по методу обращения движения…………………… 73 БИБЛИОГРАФИЧЕСКИЙ СПИСОК………………………………………….………..….. 79 3 ВВЕДЕНИЕ Важным этапом изучения дисциплины «Теория механизмов и машин» для студентов, обучающихся по специальностям (23.05.01) 190109 – «Наземные транспортно-технологические средства» и 23.05.03 – Подвижной состав железных дорог очной и заочной форм обучения, является самостоятельное выполнение курсовой работы. Это предусматривает решение целого комплекса инженерных задач, касающихся синтеза и анализа шарнирно-рычажных и кулачковых механизмов. Указанные типы механизмов широко распространены в различных отраслях народного хозяйства, в том числе на транспорте. Курсовая работа состоит из двух частей. 1-я часть: «Кинематический синтез, структурный, кинематический и кинетостатический анализ плоского шарнирно-рычажного механизма». В зависимости от номера задания и варианта исходных данных проектируется кривошипно-ползунный или кривошипно-коромысловый механизм. Анализ выбранного типа механизма проводится для заданного положения входного звена. 2-я часть: «Проектирование плоского кулачкового механизма». В зависимости от номера задания и варианта исходных данных проектируется один из трех видов плоских кулачковых механизмов: с плоским толкателем; с роликовым толкателем; с роликовым коромыслом. Для выбранного типа кулачкового механизма производится расчет аналогов скорости и ускорения, а также перемещения выходного звена. Графическим способом определяется минимальный радиус кулачка. Курсовая работа содержит расчетную (пояснительная записка) и графическую (чертежи) части. Номер задания и вариант исходных данных студентам очного и заочного обучения выдает преподаватель. Настоящие методические указания предназначены для выполнения курсовой работы по дисциплине «Теория механизмов и машин» студентами очной и заочной форм обучения по специальностям (23.05.01) 190109 – «Наземные транспортнотехнологические средства» и 23.05.03 – Подвижной состав железных дорог. Выполнение курсовой работы направлено на формирование у студентов следующих компетенций. Специальность НТТС ОК-3 – способность к осуществлению просветительной и воспитательной деятельности в сфере публичной и частной жизни, владение методами пропаганды научных достижений; ОК-5 – владение литературной и деловой письменной и устной речью на русском языке, навыками публичной и научной речи, умение создавать и редактировать тексты 4 профессионального назначения, владение одним из иностранных языков как средством делового общения; ОК-7 – владение культурой мышления, способность к обобщению, анализу, критическому осмыслению, систематизации, прогнозированию, постановке целей и выбору путей их достижения, умение анализировать логику рассуждений и высказываний; ОК-8 – способность самостоятельно применять методы и средства познания, обучения и самоконтроля для приобретения новых знаний и умений, в том числе в новых областях, непосредственно не связанных со сферой деятельности, развития социальных и профессиональных компетенций; ПК-2 – способность самостоятельно приобретать с помощью информационных технологий и использовать в практической деятельности новые знания и умения, в том числе в новых областях знаний, непосредственно не связанных со сферой деятельности; ПК-15 – способность использовать прикладные программы расчета узлов, агрегатов и систем транспортно-технологических средств и их технологического оборудования. Специальность ПСЖД ПК-7 – способность применять методы расчета и оценки прочности сооружений и конструкций на основе знаний законов статики и динамики твердых тел, исследовать динамику и прочность элементов подвижного состава; ПК-32 – готовность к организации проектирования подвижного состава; умение разрабатывать кинематические схемы машин и механизмов, определять параметры их силовых приводов, подбирать электрические машины для типовых механизмов и машин, обосновывать выбор типовых передаточных механизмов к конкретным машинам; владение основами механики и методами выбора мощности, элементной базы и режима работы электропривода технологических установок; владение технологиями разработки конструкторской документации, эскизных, технических и рабочих проектов элементов подвижного состава и машин, нормативно-технических документов с использованием компьютерных технологий. 5 СОДЕРЖАНИЕ КУРСОВОЙ РАБОТЫ Курсовая работа содержит графическую часть (чертежи). расчетную часть (пояснительная записка) и Основные разделы пояснительной записки Пояснительная записка курсовой работы выполняется на листах формата А4 с соблюдением всех требований ЕСКД для текстовой конструкторской документации. Расчетная часть курсовой работы должна содержать следующие разделы. 1. Синтез и анализ плоского четырехзвенного шарнирно-рычажного механизма 1.1. Кинематический синтез механизма. 1.2. Структурный анализ механизма. 1.3. Кинематический анализ механизма. 1.3.1. Построение плана механизма для заданного положения входного звена. Определение крайних положений выходного звена. Определение и обозначение углов поворота кривошипа за рабочий и холостой ход выходного звена. Построение траектории движения точек звеньев механизма. 1.3.2. Определение скоростей и ускорений движения точек и звеньев механизма (выполняется для заданного положения φ0 входного звена методом планов скоростей и планов ускорений.) 1.4. Построение кинематических диаграмм перемещения, скорости и ускорения выходного звена от угла поворота кривошипа. Анализ полученных диаграмм. Диаграмма перемещений выходного звена строится путем снятия замеров с плана механизма. Диаграммы скорости и ускорения выходного звена от угла поворота кривошипа строятся, используя методы графического дифференцирования. 1.5. Кинетостатический анализ механизма. 1.5.1. Расчет сил тяжести звеньев, а также сил инерции и моментов сил инерции масс звеньев. 1.5.2. Определение реакций в кинематических парах и уравновешивающего момента из условия равновесия сил. 1.5.3. Определение уравновешивающей силы (уравновешивающего момента) методом профессора Жуковского. Пункты 1.4.1–1.4.3 выполняются для заданного положения φ0 входного звена. 2. Синтез кулачкового механизма 2.1. Построение кинематических диаграмм аналога ускорения, аналога скорости и перемещения выходного звена в функции угла поворота кулачка. График изменения аналога ускорения выходного звена в функции угла поворота кулачка строится по заданному в исходных данных закону изменения ускорения выходного звена. Используя методы графического интегрирования, строятся диаграммы аналога скорости, а также перемещения выходного звена в функции угла поворота кулачка. 6 2.2. Определение минимального радиуса кулачка. Построение диаграммы изменения углов давления при работе кулачкового механизма. Для кулачковых механизмов с роликовым толкателем или с роликовым коромыслом минимальный радиус кулачка определяется с учетом допускаемого угла давления. Для кулачковых механизмов с плоским толкателем – из условия выпуклости профиля кулачка. В обоих случаях используются кинематические диаграммы, построенные в п. 2.1. 2.3. Построение профиля кулачка по методу обращения движения. (Для кулачковых механизмов с роликовым толкателем или с роликовым коромыслом вначале строится теоретический профиль кулачка, по которому определяется радиус ролика, а затем строится практический (рабочий) профиль кулачка. Для кулачкового механизма с плоским толкателем рабочий профиль кулачка строится сразу по диаграмме перемещения толкателя (без предварительного построения теоретического профиля), а затем определяется требуемый радиус тарелки толкателя.) Содержание графической части курсовой работы Графическая часть курсовой работы выполняется на двух листах формата А1 с соблюдением требований ЕСКД для графической документации. Лист 1. «Синтез и анализ четырехзвенного шарнирно-рычажного механизма» План механизма для 8 – 12 положений входного звена (обязательно показать заданное положение φ0 входного звена). Кинематические диаграммы. План скоростей для заданного положения φ0 входного звена. План ускорения для заданного положения φ0 входного звена. Планы нагружений, планы сил структурных групп, рычаг Жуковского для заданного положения φ0 входного звена. Лист 2. «Синтез кулачкового механизма» Графики изменения аналога ускорения, аналога скорости и перемещения выходного звена в функции угла поворота кулачка. Графическое определения rmin (минимального радиуса кулачка). Построение профиля кулачка. 1. СИНТЕЗ И АНАЛИЗ ПЛОСКОГО ЧЕТЫРЕХЗВЕННОГО ШАРНИРНО-РЫЧАЖНОГО МЕХАНИЗМА Механизмы, звенья которых образуют только низшие (вращательные, поступательные, цилиндрические, сферические) кинематические пары, называются шарнирно-рычажными. Указанные механизмы имеют широкое применение в машиностроении вследствие того, что при взаимодействии образующих их звеньев 7 усилия в кинематических парах распределяются по поверхности. В результате величина удельного давления и износ элементов кинематических пар заметно снижаются. Проектирование любого шарнирно-рычажного механизма по заданной кинематической схеме включает в себя следующие этапы: кинематический синтез, кинематический и силовой анализ. Самыми простыми представителями шарнирно-рычажных механизмов являются кривошипно-ползунный и кривошипно-коромысловый механизмы. Рассмотрим порядок выполнения курсовой работы по дисциплине «Теория механизмов и машин» на примере проектирования указанных типов механизмов. 1.1. Кинематический синтез механизма Целью кинематического синтеза при проектировании любого механизма является определение размеров всех его звеньев по заданным технологическим и эксплуатационным показателям. 1.1.1. Кинематический синтез кривошипно-ползунного механизма При проектировании кривошипно-ползунного механизма обычно задают: - в качестве параметра технологического процесса – ход ползуна Sп ; - в качестве эксплуатационных параметров: - коэффициент возрастания средней скорости обратного (холостого) хода выходного звена ; - коэффициент пика скорости ползуна ; - угол р поворота кривошипа за рабочий ход ползуна. Задаются также безразмерные коэффициенты: отношение длины шатуна к длине кривошипа r ( l r ) или отношение величины дезаксиала е к длине кривошипа r ( x e r ). Рассмотрим методику кинематического синтеза механизма по этим параметрам. Синтез механизма по ходу ползуна, коэффициенту возрастания средней скорости обратного хода ползуна и отношению длин шатуна и кривошипа На рис. 1 приведена кинематическая схема кривошипно-ползунного механизма с указанием основных размерных параметров. Из рис. 1 видно, что хх + рх=360о ; рх – хх = θ, где хх – угол поворота кривошипа при обратном (холостом) ходе ползуна; рх – угол поворота кривошипа при прямом (рабочем) ходе ползуна; θ – угол перекрытия. 8 Рис. 1. Основные размерные параметры кривошипно-ползунного механизма Коэффициентом возрастания средней скорости обратного хода называют отношение средней скорости обратного хода ползуна Vх к средней скорости Vр прямого хода: V х Vр . Так как кривошип вращается с постоянной угловой скоростью, то Vх Vр рх хх . Принимая во внимание, что рх = 180о + θ ; хх = 180о – θ, получим = (180о + θ ) / (180о – θ) , откуда θ = 180о ( – 1) / ( + 1) . Из АС1С2 по теореме косинусов: S п2 l r l r 2 l r l r cos . 2 2 Обозначим = / r, тогда Sп2 2l 2 1 2 1 2 cos . Размеры звеньев механизма находятся из выражений: длина шатуна l Sп 2 1 2 1 2 cos ; длина кривошипа r l . Величину дезаксиала определим, решая треугольники АЕС1 и АС1С2 : e r l sin γ1 r l l r sin θ Sп . 9 Пример 1. Рассчитать размеры звеньев кривошипно-ползунного механизма по следующим исходным параметрам: S п 0.04 м ; 1.1; 4 . Решение Определяем угол перекрытия 180 0 1 1 180 0 1.1 1 1.1 1 8.57 0 0.04 2 1 2 1 2 cos Длина шатуна l Sп 2 1 42 1 42 cos 8.57 0 0.077 м Длина кривошипа: r l 0.077 4 0.0192 м . Дезаксиал e r l l r sin θ Sп 0.019 0.077 0.077 0.019 sin 8.57 0 0.04 0.021 м Синтез центрального механизма по ходу ползуна и коэффициенту Пика скорости ползуна Безразмерным коэффициентом Пика скорости называют отношение максимальной скорости ползуна VC max к его средней скорости VC : ν V C max Максимальное значение скорости VC max VC . ползуна будет в положении механизма, когда кривошип и шатун составляют угол 90о (рис. 2, а). План скоростей, соответствующий данному положению кривошипа, показан на рис. 2, б. На основании свойства подобия плана скоростей можно записать отношение V V = / r , то V V c max Так как в c max рс AC рв BC BC AB BC 2 2 r . 2 2 1 2 . В Рис. 2. Определение максимальной скорости ползуна в центральном кривошипно-ползунном механизме: а – требуемое положение звеньев механизма; б – план скоростей 10 Для центрального кривошипно-ползунного механизма ход ползуна равен двум длинам кривошипа Sп = 2r. Тогда длина кривошипа находится из выражения r = Sп /2 . Скорость точки В кривошипа VВ = r 1 = Sп1/2 . Максимальная скорость ползуна V c max V B 1 2 ( S п 1 1 2 ) / 2 . (1) Средняя скорость ползуна VC 2Sп T Sп1 , где Т = 2 / 1 – время одного оборота кривошипа (одного двойного хода ползуна). Выразим максимальную скорость ползуна через его среднюю скорость и коэффициент Пика скорости: V c max Vc νS п 1 / π . (2) Сопоставляя (1) и (2), запишем ( S п 1 1 2 ) / 2 νS п 1 / π . После преобразований получим выражение для определения длины шатуна: l r 4 2 2 (при условии, что / 2). Пример 2. Рассчитать размеры звеньев центрального кривошипно-ползунного механизма по следующим исходным параметрам: Sп 0.06 м ; 1.59 . Решение Длина кривошипа r Sп 2 0.06 2 0.03 м . Длина шатуна l r 4 2 2 3.14 0.03 11 4 1.59 2 3.14 2 0.19 м . Синтез механизма по ходу ползуна, коэффициенту пика скорости и углу поворота кривошипа за рабочий ход ползуна На рис. 3 показано текущее положение дезаксиального кривошипно-ползунного механизма и соответствующий ему план скоростей. Из плана скоростей следует, что sin = рв / рс = VB /Vc max . Тогда (V 2 c max 2 / V B) (V c max / V B) 2 V B / V c max 2 2 х 2 . Составляем квадратное уравнение (Vc max / VB)2 (2 – х2) – 2х(Vc max / VB) – (1+2) = 0. (3) Решение уравнения (3) имеет вид 2 2 V c max / V B [ х х2 (2 х2)(1 2 )] /( х ) . Рис. 3. Определение максимальной скорости ползуна: а – требуемое положение звеньев механизма; б – план скоростей После преобразования получим: 2 2 2 2 V c max / V B ( х 1 х ) /( х ) ; 2 2 2 2 V c max V B ( х λ λ 1 х ) / (λ х ) . (4) Скорость точки В V B 1r . (5) Средняя скорость рабочего хода ползуна V*c = Sп / tp = Sп 1 / pх , где pх – угол поворота кривошипа за рабочий ход ползуна. 12 Для дезаксиального (как и для центрального) кривошипно-ползунного механизма максимальное значение скорости ползуна V c max будет в положении, когда кривошип и шатун образуют угол 90о (рис. 3, а; 3, б). На основании свойства подобия плана скоростей: pc pb BC DC BC 2 2 ВС ВD . pc / pb V c max / V B / 2 (r sin e) 2 . Т.к. ВD=ВЕ+ЕD = r sin + е, то Обозначая /r = , e / r = x и произведя преобразования, получим: 2 (sin х) . 2 V c max / V B (6) Возведя обе части (6) в квадрат и произведя преобразования, получим (V c max / V B) 2 2 2 (sin х) 2 . Учитывая, что = Vc max / V*c , а также V*c = Sп 1 / pх , определим максимальную скорость ползуна V c max Vc S п 1 pх . (7) Сопоставляя (4) и (7) с учетом (5), получим r1 ( х λ λ2 1 х2 ) /( λ2 х2) ν S п ω1 рх . Откуда длина кривошипа r ν S п (λ2 х2) рх х 2 1 х2 ; длина шатуна r ; e rx . дезаксиал Пример 3. Определить размеры звеньев кривошипно-ползунного механизма по следующим исходным параметрам: S п 0.13 м ; ν 1.75 ; рх 3.31 рад ; 3.5 ; x 0.8 . Решение х 1 х 1.75 0.13 (3.5 0.8 ) 3.31 0.8 3.5 3.5 1 0.8 , r ν S п ( λ 2 х 2) 2 откуда 2 2 рх 2 r1 0.060м , 2 2 r2 0.070 0.070 м . Принимаем r r1 0.060м ; длина шатуна r 0.060 3.5 0.21 м ; дезаксиал e rx 0.060 0.8 0.048 м . 13 1.1.2. Кинематический синтез кривошипно-коромыслового механизма Для определения размеров звеньев при проектировании кривошипнокоромыслового механизма обычно задают: - в качестве параметров технологического процесса: - положения кривошипа (1, 2, 3) и соответствующие им положения выходного звена (1, 2, 3); - полный угол качания выходного звена и его положения в крайних точках; - в качестве эксплуатационного параметра – коэффициент возрастания скорости обратного хода коромысла . Задается также длина кривошипа r или коромысла R, или безразмерный коэффициент их отношения ( = R/r). Рассмотрим методику кинематического синтеза механизма по указанным параметрам. Синтез механизма по заданным положениям кривошипа и соответствующим им положениям коромысла На рис. 4 приведена кинематическая схема кривошипно-коромыслового механизма с указанием основных размерных параметров. Запишем уравнения проекций контура механизма АВСD на горизонтальную и вертикальную оси для произвольного положения входного звена (рис. 4): r cos l cos R cos L; r sin l sin R sin . (8) Разделив обе части каждого уравнения на r и произведя перестановки членов каждого уравнения, получим: l cos r l sin r R L cos cos ; r r R sin sin . r (9) Рис. 4. Основные размерные параметры кривошипно-коромыслового механизма 14 Введем безразмерные коэффициенты отношения длин: l шатуна и кривошипа ; r коромысла и кривошипа R ; r межосевого расстояния и кривошипа L . r Тогда: cos cos cos ; sin sin sin . (10) Возведя левые и правые части уравнений в квадрат и складывая их, получим: cos 2 2 1 2 cos β cos . . 2 ν 2 2 1 2 Обозначив c1 , c2 , c3 , 2 χ получим: c1 cos c2 cos c3 cos . (11) (12) Для трех заданных положений механизма получим систему линейных уравнений: c1 cos 1 c 2 cos 1 1 c3 cos1 ; c1 cos 2 c 2 cos 2 2 c3 cos 2 ; c1 cos 3 c 2 cos 3 3 c3 cos 3 . (13) Так как в данной системе число неизвестных равно числу уравнений, то решением системы будет: c1 D D1 D , c 2 2 , c3 3 , D D D где cosβ 1 D cosβ 2 cosβ 3 cos β 1 1 1 cos β 2 2 1 – определитель системы; cos β 3 3 1 (14) D1, D2, D3 – определители, получаемые из выражения (14) заменой столбца, составленного из коэффициентов при соответствующем неизвестном, столбцом, составленным из свободных членов: 15 cos 1 D1 cos 2 cos 3 cosβ1 D3 cosβ 2 cosβ 3 cos β 1 1 1 cos β 2 2 1 ; cos β 3 3 1 cos β1 1 cosβ 1 cos 1 1 D2 cosβ 2 cos 2 cosβ 3 cos 3 1 ; 1 cos1 cos β 2 2 cos 2 . cos β 3 3 cos 3 Задавшись длиной одного звена (например, кривошипа), можно определить длины остальных звеньев механизма. Пример 4. Рассчитать размеры звеньев кривошипно-коромыслового механизма по следующим исходным параметрам: r = 90 мм, R = 150 мм, 1 45 0 , 2 90 0 , 3 135 0 , β1 40.67 0 , β 2 71 .50 0 , β 3 98 .94 0 . Решение Система линейных уравнений для трех заданных положений механизма имеет вид: c1 cos 1 c 2 cos 1 1 c3 cos1 ; c1 cos 2 c 2 cos 2 2 c3 cos 2 ; c1 cos 3 c 2 cos 3 3 c3 cos 3 . Здесь c1 R 150 1.667 . r 90 Так как значение c1 известно, то в приведенной выше системе остаются только два уравнения. Это могут быть любые уравнения системы, которые по отношению друг к другу всегда будут независимыми. Подставляя числовые значения, например, в первые два уравнения и решая полученную систему, запишем 1.667 cos 40 .67 0 c 2 cos 40 .67 0 45 0 c3 cos 45 0 , 1.667 cos 71 .50 0 c 2 cos 71 .5 0 90 0 c3 cos 90 0 , 1.264 0.997 c 2 c3 0.707 , 0.529 0.948 c 2 c3 0, c3 0.0193 . c2 0.5784 , 2 2 1 2 c3 , 2 l R , r r недостающие размеры кривошипно-коромыслового механизма. Межосевое расстояние L r 2.882 90 260 мм , Учитывая, что L r где χ , ν c2 ; χ ν 1.667 2.882 . 0.5784 c2 16 , χ L , r определим Длина шатуна l r 3.460 90 312 мм , где l r 2 2 1 2c3 2.882 2 1.667 2 1 2 2.882 0.0193 3.460 . Синтез механизма по полному углу качания выходного звена, его положениям в крайних точках и коэффициенту возрастания скорости обратного хода На рис. 5 приведена кинематическая схема кривошипно-коромыслового механизма в двух крайних положениях звеньев. Коэффициентом возрастания скорости обратного хода коромысла называется отношение средней угловой скорости обратного хода коромысла хх к средней угловой скорости рабочего хода рх : σ ω xx px , ω px xx (15) где рх – угол поворота кривошипа за рабочий ход коромысла; xх – угол поворота кривошипа за холостой ход коромысла, px xx 360 , px xx 2θ , здесь θ – угол перекрытия, px 180 θ , тогда xx 180 , px 180 откуда 180 xx 180 θ , 1 . 1 (16) Спроектируем контур механизма в его крайних положениях на координатные оси. Положение AB1C1D: r l cosθ1 L Rcosβ1 ; r l sin 1 R sin 1. (17) Положение AB2C2D: l r cosθ 2 L R cos 180 β 2 ; l r sin 2 R sin 180 β 2 . (18) Поделив в каждой из приведенных систем второе уравнение на первое, получим tgθ 1 Rsin β 1 : L Rcosβ 1 (19) tgθ 2 Rsinβ 2 . L Rcosβ 2 (20) 17 Рис. 5. Кинематическая схема механизма для крайних положений звеньев Из рис. 5 следует: 2 1 , tgθ 2 tg θ θ1 tgθ tgθ1 1 tgθ tgθ1 (21) . С учетом выражений (20) и (22), имеем: R sin 1 R sin 2 L R cos 1 . R sin 1 L R cos 2 1 tg L R cos 1 tg (22) Произведя соответствующие преобразования и обозначив A tgθ , B Rtgθcosβ1 cosβ2 sinβ1 sinβ2 , C R 2 sin β 2 β1 tgθ cosβ 2 β1 , получим: AL2 BL C 0. (23) Решение квадратного уравнения (23): L1, 2 B B 2 4 AC . 2A (24) Подставив L1,2 в формулы (19), (20), найдем величины углов θ 1 и θ 2 : θ11 , θ12 – для первого варианта размеров звеньев механизма; θ 21 , 22 – для второго варианта размеров звеньев механизма. 18 Длины кривошипа r и шатуна l находятся при решении уравнений (17), (18): r R sin 1 sin 2 ; 2 sin 1 sin 2 (25) l R sin 1 sin 2 . 2 sin 1 sin 2 (26) Получим два варианта размеров звеньев механизма. Для дальнейшей работы студент принимает один из полученных вариантов самостоятельно или по согласованию с преподавателем. Пример 5. Рассчитать размеры звеньев кривошипно-коромыслового механизма по следующим исходным параметрам: 1 = 40, 2 = 130; R = 400 мм; = 1.25. Решение Угол перекрытия механизма 180 1 180 1.25 1 20 . 1 1.25 1 Решая уравнение (24), находим расстояние между кинематическими парами «стойка–кривошип» и «стойка–коромысло» для двух вариантов размеров звеньев механизма: L1 = 706 мм; L2 = – 620.6 мм. Подставляя значения L1 и L2 в формулы (19) и (20), находим величины углов 1 , 2 : 11 14 0 20 / , 12 39 0 20 / ; 21 34 0 20 / , 22 19 0 20 / . Подставляя значения углов 11 , 21 и 12 , 22 в формулы (25), (26), найдем длину кривошипа r и шатуна l: r1= 248 мм; r2= 260 мм; l1= 784 мм; l2= – 664 мм. Примечание. Знак «–» при определении длины l2 шатуна означает, что кинематическая пара D «коромысло–стойка» расположена слева от кинематической пары А «стойка–кривошип», принятой за начало координат. Принимаем первый вариант размеров звеньев. 19 1.2. Структурный анализ механизма Основными задачами структурного анализа любого плоского механизма являются: 1) исследование структурно-кинематической схемы механизма; 2) определение степени подвижности механизма; 3) определение количества, класса и вида, а также порядка групп Ассура, образующих механизм; 4) запись формулы строения механизма. Рассмотрим порядок выполнения структурного анализа на конкретных примерах. 1.2.1. Структурный анализ кривошипно-ползунного механизма На рис. 6,а изображена структурно-кинематическая схема кривошипно-ползунного механизма. I(0;1) б а II2(2;3) в Рис. 6. Выделение структурных групп в кривошипно-ползунном механизме 1. Анализ кинематической схемы показывает, что механизм содержит три подвижных звена и одно неподвижное звено 0 (стойка). Подвижные звенья и стойка образуют 4 кинематические пары V класса, из которых три – вращательные и одна – поступательная (табл. 1). Таблица 1 Наименование, класс и обозначение кинематических пар, образующих механизм № п/п 1 2 3 4 Обозначение кинематической пары А В С D Звенья, образующие кинематическую пару 0и1 1и2 2и3 3и0 20 Класс кинематической пары V V V V Наименование кинематической пары вращ. вращ. вращ. поступ. 2. Определяем степень подвижности механизма W = 3n – 2p5 – p4 = 33 – 24 – 0 = 1, где n= 3 – число подвижных звеньев; p5 = 4, p4 = 0 – число кинематических пар V и IV классов. Поскольку W = 1, механизм имеет одну обобщенную координату. Для приведения в движение механизма требуется одно входное звено. Таковым может быть любое подвижное звено, образующее кинематическую пару V класса со стойкой. 3. Примем за входное звено кривошип 1. Выделяем начальный механизм I класса (рис. 6, б), который представляет собой входное звено 1 и стойку 0, образующие между собой кинематическую пару А. Степень подвижности такого механизма W = 1. Условный шифр начального механизма – I(0,1). Оставшаяся кинематическая цепь имеет степень подвижности W = 0 и является группой Ассура 2-го класса, 2-го вида и 2-го порядка (рис. 6, в). Она не может быть разбита на более простые цепи с нулевой степенью подвижности. Условный шифр группы Ассура – II2(2,3). 4. Формула строения всего механизма представляет последовательность присоединения групп Ассура к механизму I класса: I(0,1) – II2(2,3). Поскольку наивысший класс групп Ассура в рассматриваемом механизме равен двум, следовательно, механизм также относится ко II классу. 1.2.2. Структурный анализ кривошипно-коромыслового механизма На рис. 7,а изображена структурно-кинематическая схема кривошипнокоромыслового механизма. 1. Анализ кинематической схемы показывает, что механизм содержит три подвижных звена (1, 2, 3) и одно неподвижное звено 0 (стойка). Подвижные звенья и стойка образуют 4 вращательные кинематические пары V класса (табл. 2). Таблица 2 Наименование, класс и обозначение кинематических пар, образующих механизм № п/п 1 2 3 4 Обозначение кинематической пары А В С D Звенья, образующие кинематическую пару 0и1 1и2 2и3 3и0 Класс кинематической пары V V V V Наименование кинематической пары вращ. вращ. вращ. вращ. 2. Определяем степень подвижности механизма W = 3n – 2p5 – p4 = 33 – 24 – 0 = 1, где n= 3 – число подвижных звеньев; p5=4, p4 = 0 – число кинематических пар V и IV классов. 21 Поскольку W = 1, механизм имеет одну обобщенную координату. Для приведения в движение механизма требуется одно входное звено. Таковым может быть любое подвижное звено, образующее кинематическую пару V класса со стойкой. I(0;1) а б II1(2;3) в Рис. 7. Выделение структурных групп в кривошипно-коромысловом механизме 3. Примем за входное звено кривошип 1. Выделяем начальный механизм I класса (рис. 7, б), который представляет собой входное звено 1 и стойку 0, образующие между собой кинематическую пару А. Степень подвижности такого механизма W = 1. Условный шифр начального механизма I(0,1). Оставшаяся кинематическая цепь имеет степень подвижности W = 0 и является группой Ассура II класса, 1-го вида и 2-го порядка (рис. 7, в). Она не может быть разбита на более простые цепи с нулевой степенью подвижности. Условный шифр группы Ассура – II1(2,3). 4. Формула строения всего механизма представляет последовательность присоединения групп Ассура к механизму I класса: I(0,1) – II1(2,3). Поскольку наивысший класс групп Ассура в рассматриваемом механизме равен двум, следовательно, механизм также относится ко II классу. 1.3. Кинематический анализ механизма Основными задачами кинематического анализа механизма являются: определение крайних положений механизма, определение описываемых точками звеньев механизма; 22 траекторий, определение линейных скоростей точек звеньев и угловых скоростей звеньев; определение линейных ускорений точек звеньев и угловых ускорений звеньев. Кинематический анализ любого плоского механизма выполняется в последовательности, предусмотренной его формулой строения. Рассмотрим порядок выполнения кинематического анализа на конкретных примерах. 1.3.1. Кинематический анализ кривошипно-ползунного механизма Исходные данные: lAB = 0.0192 м; lBС = 0.077 м; e = 0.021 м; 1 = 12 с-1; 0 = 300 (см. пример 1 кинематического синтеза). Построение плана механизма для заданного положения входного звена Из точки А под углом 0 к горизонту откладываем отрезок АB произвольной длины (рис. 8, а). а б в Рис. 8. Кинематический анализ кривошипно-ползунного механизма Масштаб плана механизма: l 0.0192 м , Kl AB 0.0005 AB 38.4 мм где lАВ – заданная длина кривошипа, м; АВ – принятая длина отрезка на плане механизма, мм. 23 От точки А вниз на расстояние, соответствующем дезаксиалу e в масштабе K l , проводим горизонталь, определяющую положение направляющей движения ползуна. Из точки В раствором циркуля, равным длине шатуна ВС (в выбранном масштабе), делаем засечку на построенной ранее горизонтальной прямой, т.е. определяем положение точки С на направляющей ползуна, соответствующее углу 0 отклонения кривошипа АВ. Определение крайних положений выходного звена. Определение и обозначение углов поворота кривошипа за рабочий и холостой ход выходного звена. Построение траектории движения точек звеньев механизма Определяем крайние положения механизма. Для этого из точки А на направляющей ползуна делаем две засечки радиусами, равными сумме (крайнее дальнее положение ползуна) и разности (крайнее ближнее положение ползуна) принятых в масштабе к длин шатуна и кривошипа. Расстояние между полученными точками должно быть равно (в принятом масштабе к ) заданному ходу ползуна Sп. Строим окружность радиусом АВ, представляющую траекторию движения точки B. Отмечаем положения кривошипа, соответствующие крайнему ближнему и крайнему дальнему положению коромысла. Замеряем центральные углы между полученными положениями кривошипа. Больший угол обозначаем рх (угол поворота кривошипа за рабочий ход ползуна), а меньший – хх (угол поворота кривошипа за холостой ход ползуна). Положение кривошипа, соответствующее крайнему ближнему положению коромысла, обозначим точкой 0. Разделяем окружность радиусом АВ на 12 равных частей. По направлению 1 отмечаем точки 0, 1,… 11 и строим соответствующие положения кривошипа. Положение кривошипа, соответствующее крайнему дальнему положению коромысла, обозначаем 6 /, поскольку оно находится между отметками 6 и 7 . Из каждой полученной точки раствором циркуля, равным длине шатуна ВС (в выбранном масштабе), делаем засечки на направляющей ползуна, т.е. определяем положение ползуна, соответствующее i-му положению кривошипа (точки 0, 1,… 11 на направляющей). Соединяя одноименные точки Вi и Сi, получаем различные положения шатуна ВС. Находим положение центра масс (S2i) для каждого положения шатуна ВС. Так как кривошип, шатун и коромысло представляют собой однородные стержни, то их центры масс расположены посередине длины каждого (если иное не оговорено). Соединив плавной кривой точки S2i, получаем траекторию движения центра масс шатуна ВС (шатунную кривую). 24 Определение скоростей движения точек и звеньев механизма Кинематический анализ начинаем с основного двухзвенного (первичного) механизма, состоящего из кривошипа (1) и стойки (0). Определяем скорость точки В, м/с VB =1 lAB = 12 c-1 0,0192 м =0,2304 м/с . Вектор V B AB и направлен по направлению угловой скорости 1. В соответствии с формулой строения механизма переходим к структурной группе «шатун–ползун» (группа Ассура 2–3). Для определения скорости точки С движение ее будем рассматривать совместно со звеном 2 (шатун), а также совместно со звеном 3 (ползун). Шатун совершает плоское движение, которое состоит из поступательного (переносного) движения вместе с точкой, параметры движения которой известны (точка В), и вращательного (относительного) движения вокруг этой точки. Скорость точки C в системе звена 2 (шатун): V c V B V CB , где V CB – линейная скорость точки С во вращательном движении относительно точки В (направлена перпендикулярно ВС). Скорость точки C в системе звена 3 (ползун): V c V D V CD , где V D – скорость точки D, принадлежащей направляющей, рассматриваемый момент времени совпадает точка С, V D 0 ; с которой в V CD – скорость движения ползуна по направляющей (линия действия V CD параллельна направляющей). Полученные уравнения решаем графически путем построения плана скоростей (рис. 8, б). Через точку р , выбранную в качестве полюса плана скоростей, проводим линию, перпендикулярную АВ, и откладываем на ней вектор скорости точки В (отрезок рв). Определяем масштаб плана скоростей: KV V pb B 0,2304 м/с м/с , 0,0025 92 мм мм где рв – длина вектора, изображающего на плане скоростей вектор скорости точки В. 25 Через точку в проводим линию, перпендикулярную ВС (линию, по которой направлен вектор скорости относительного вращательного движения). Через полюс (точка р) проводим линию, параллельную направляющей. Пересечение этих линий определяет положение точки с на плане скоростей. По правилу сложения векторов определяем направления найденных скоростей (оба вектора направлены к точке с). Измерив длины построенных векторов, получим: вс КV = VСВ ; VСВ = 85 мм·0.0025 м/с мм = 0.212 м/с; рс КV = VС ; VС = 84 мм·0.0025 м/с мм = 0.21 м/с. Определяем мгновенное значение угловой скорости шатуна: 2 V CB 0.212 м/с 2,76 CB 0.0768 м c 1 . Для определения направления угловой скорости звена 2 мысленно переносим вектор линейной скорости точки С в относительном вращательном движении (вектор вс ) с плана скоростей в точку С плана механизма. Угловая скорость шатуна направлена по часовой стрелке. Показываем направление 2 на плане механизма. Определение ускорений движения точек и звеньев механизма Определяем ускорение точки В. Так как кривошип вращается с постоянной угловой скоростью 1 , то n 2 а В а ВА 1 r ; 2 -1 0.0192 м 2.76 м/с . a 12 с n ВА n Вектор а ВА направлен по радиусу (по кривошипу) к центру вращения, т.е. к точке А. Для определения абсолютного ускорения точки С запишем уравнения: n аС а В аСВ а В аСВ aCВ aC aD aCD (в системе звена 2), (в системе звена 3), (8) (9) где аСВ – полное относительное ускорение точки С в ее вращательном движении относительно точки В; n аСВ , aCВ – нормальное и тангенциальное ускорение точки С относительно точки В; aD 0 – ускорение точки D, принадлежащей направляющей; aCD – ускорение точки С относительно направляющей. 26 n n Вектор аСВ направлен вдоль звена ВС к точке В. Модуль вектора аСВ определяется по формуле n 2 aCB 2l BC 2.76 с 1 2 0.0768 м 0.585 м/c 2 . Линия действия векторов aCВ и aCD направлена соответственно перпендикулярно ВС и параллельно направляющей ползуна. Для определения модуля и направления aCВ и aCD графически решаем систему векторных уравнений путем построения плана ускорений (рис. 8, в). Через произвольную точку , принятую за полюс плана ускорений, проводим линию, параллельную АВ, и на ней откладываем отрезок в, изображающий ускорение точки В. Определяем масштаб плана ускорений: Kа n a BA πв 2.76 м с 2 м с2 . 0.025 110.4 мм мм Так как уравнение (8) представляет собой векторную сумму, то через точку в проводим линию, параллельную звену ВС, и на ней в выбранном масштабе откладываем отрезок вс , изображающий на плане ускорений вектор n вс аСВ Ka Через точку 0 ,585 м/с 2 2 0 ,025 м/с мм n aCB : 23,4 мм . с проводим линию, перпендикулярную звену ВС (линию, по которой направлен вектор aCВ ). Согласно уравнению (9), через полюс проводим линию, направляющей. Пересечение линий, перпендикулярной ВС и направляющей, определяет положение т. С на плане ускорений. параллельную параллельной Вектор сс , изображающий тангенциальное ускорение т. С, направлен от с к аСВ сс K а 50 мм 0.025 м/c 2 с : мм 1.25 м/c 2 . Вектор c , изображающий абсолютное ускорение точки С, направлен от полюса к точке С. ac c K а 98 мм 0.025 м/c 2 мм 2.45 м/c 2 . 27 Соединив на плане ускорений точки в и с, найдем вектор, изображающий полное ускорение точки С относительно точки В. Он направлен от точки в к точке c : aCB bc K а 54 мм 0.025 м/c 2 мм 1.35 м/c 2 . Определяем мгновенное значение углового ускорения шатуна: ε2 а с ; СВ 2 ε2 ВС 1,25 м/с 2 16,2 с 2 . 0.0768 м Методика определения направления углового ускорения аналогична методике определения угловой скорости. В рассматриваемом примере угловое ускорение шатуна направлено против часовой стрелки. Для определения ускорений центров масс звеньев воспользуемся свойством подобия планов ускорений. Ускорение центра масс кривошипа: 2 a 2,76 м/с 1,38 м/с 2 . а 2 2 n ВА s1 Ускорение центра масс ползуна а a 2.45 м/c . 2 S3 с Для нахождения ускорения центра масс шатуна нанесем точку S2 на линию вс плана ускорений и соединим ее с полюсом . Вектор S 2 направлен от полюса и изображает на плане ускорений вектор абсолютного ускорения центра масс шатуна: 2 2 а S К 100 мм 0.025 м с мм 2.5 м с . s2 lAD 2 a 1.3.2. Кинематический анализ кривошипно-коромыслового механизма Исходные данные: lAB = 0.248 м; lBС = 0.784 м; lCD = 0.400 м; lDE = 0.500 м; = 0.706 м; 1 = 20 с-1; φ0 = 300 (см. пример 5 из кинематического синтеза). Построение плана механизма для заданного положения входного звена Из точки А под углом 0 к горизонту откладываем отрезок АB произвольной длины (рис. 9, а). Масштаб плана механизма: l 0,248 м м , Kl AB 0,01 AB 24,8 мм мм где lАВ – заданная длина кривошипа, м; АВ – длина отрезка, изображающего кривошип на плане механизма, мм. 28 а б в Рис. 9. Кинематический анализ кривошипно-коромыслового механизма Вправо по горизонтали откладываем отрезок АD, изображающий (в масштабе K l ) межосевое расстояние кривошипно-коромыслового механизма. Из точки D раствором циркуля, равным длине коромысла DC, проводим дугу, стягивающую крайние положения коромысла, определяемые углами 1 = 40 и 2 = 130. Полученная дуга представляет траекторию движения точки С. Из точки В раствором циркуля, равным длине шатуна ВС (в выбранном масштабе), делаем засечку на траектории движения точки С, т.е. определяем положение коромысла DC, соответствующее углу 0 отклонения кривошипа АВ. 29 Определение крайних положений выходного звена. Определение и обозначение углов поворота кривошипа за рабочий и холостой ход выходного звена. Построение траектории движения точек звеньев механизма Определяем крайние положения механизма. Для этого из точки А на траектории движения точки C делаем две засечки радиусами, равными сумме (крайнее дальнее положение коромысла) и разности (крайнее ближнее положение коромысла) длин шатуна и кривошипа (в масштабе K l ). Полученные засечки характеризуют крайние положения точки С коромысла. Строим окружность радиусом АВ, представляющую траекторию движения точки B. Отмечаем положения кривошипа, соответствующие крайнему ближнему и крайнему дальнему положению коромысла. Замеряем центральные углы между полученными положениями кривошипа. Больший угол обозначаем рх (угол поворота кривошипа за рабочий ход коромысла), а меньший – хх (угол поворота кривошипа за холостой ход коромысла). Положение кривошипа, соответствующее крайнему дальнему положению коромысла обозначим точкой 0. Разделяем окружность радиусом АВ на 8 равных частей. По направлению 1 отмечаем точки 0, 1,… 7 и строим соответствующие положения кривошипа. Положение кривошипа, соответствующее крайнему ближнему положению коромысла, обозначаем 4 /, поскольку оно находится между отметками 4 и 5 . Из каждой полученной точки (на окружности радиусом АВ) раствором циркуля, равным длине шатуна ВC (в выбранном масштабе), делаем засечки на траектории движения точки С, т.е. определяем положение коромысла DC, соответствующее i-му положению кривошипа АВ (точки 0, 1,… 7 на дуге радиусом DC). Соединяя одноименные точки Вi и Сi , получаем различные положения шатуна ВС. Находим положение центра масс (S2i) для каждого положения шатуна ВС. Так как кривошип, шатун и коромысло представляют собой однородные стержни, то их центры масс расположены посередине длины каждого (если иное не оговорено). Соединив плавной кривой точки S2i , получаем траекторию движения центра масс шатуна ВС (шатунную кривую). Определение скоростей движения точек и звеньев механизма Кинематический анализ начинаем с основного двухзвенного механизма, состоящего из кривошипа 1 и стойки 4. Определяем скорость точки В. Поскольку точка В вращается вокруг неподвижной точки А с постоянной угловой скоростью 1, то VB ω1r 20 c1 0,248 м 4,960 м . с Вектор V B AB и направлен в сторону вращения кривошипа АВ. 30 В соответствии с формулой строения механизма переходим к структурной группе «шатун–коромысло» (группа Ассура 2–3). Для определения скорости точки С рассмотрим ее движение совместно со звеном 2 (шатун) и звеном 3 (коромысло). Шатун совершает плоское движение, которое состоит из поступательного (переносного) движения вместе с точкой, параметры движения которой известны (точка В), и вращательного (относительного) движения вокруг этой точки. Следовательно: V C V B V CB , где V CB – линейная скорость точки С во вращательном движении относительно точки В (направлена BC). Рассматривая движение точки С со звеном 3, запишем: V C V D V CD , где V D – переносная скорость точки D, принадлежащей стойке 4 (V D 0 ); V CD – линейная скорость точки С во вращательном движении относительно точки D ( V CD CD ). Полученные уравнения решаются графически путем построения плана скоростей (рис. 9, б). Через точку p, выбранную в качестве полюса плана скоростей, проводим линию, перпендикулярную АВ, и откладываем на ней вектор скорости точки В (отрезок pb). Определяем масштаб плана скоростей: м м VB 4 ,960 с Kv 0 ,1 с , pb 49 ,6 мм мм где pb – длина вектора, изображающего на плане скоростей вектор скорости точки В. Через точку b, перпендикулярно ВС, проводим прямую, представляющую собой линию действия вектора V CB . Через полюс р, перпендикулярно DC, проводим прямую, представляющую собой линию действия вектора V CD . Пересечение этих прямых определяет положение точки с на плане скоростей. По правилу сложения векторов определяем направления найденных скоростей (оба вектора направлены к точке с). Измерив длины построенных векторов, получим: м 2,2 м , с с мм м VC Vcd pc Kv 30 мм 0,1 3м . с с мм VCB bc Kv 22 мм 0,1 31 Для определения линейной скорости точки Е коромысла DC, воспользуемся свойством подобия планов скоростей. Составим пропорцию: DE pe DE 50 мм , откуда pe pc 30 мм 37 ,5 мм DC pc DC 40 мм Откладываем на плане скоростей вектор pe ( pe DE ). Скорость точки Е: VE pe Kv 37,5 мм 0,1 м 3,75 м . с мм с Определяем мгновенные значения угловой скорости шатуна и коромысла: 2 ,2 м V с 2 ,8 с 1; 2 CB lCB 0 ,784 м 3м V с 7 ,5 с 1. 3 CD lCD 0 ,4 м Для определения направления угловой скорости 2 мысленно переносим вектор линейной скорости точки С относительно точки В (вектор bc ) с плана скоростей в точку С плана механизма. Угловая скорость шатуна ВС направлена по часовой стрелке. Аналогично для определения направления угловой скорости 3 мысленно переносим вектор линейной абсолютной скорости точки С (вектор pc ) с плана скоростей в точку С плана механизма. Угловая скорость коромысла DС направлена против часовой стрелки. Показываем направление 2, 3 на плане механизма. Определение ускорений движения точек и звеньев механизма Определяем ускорение точки В. Так как кривошип вращается с постоянной угловой скоростью 1, то 2 n aB aBA ω12r 20 c1 0,248 м 99,2 м 2 . с n Вектор a BA направлен по радиусу (по кривошипу) к центру вращения, то есть к точке А. Для определения абсолютного ускорения точки С запишем уравнения: n a C a B a CB a B a CB a CB n , a C a D a CD a D a CD a CD 32 где a CB – полное относительное ускорение точки С в ее вращательном движении относительно точки В; n a CB , a CB – нормальное и тангенциальное ускорение точки С в ее вращательном n движении относительно точки В. Вектор a CB направлен вдоль звена ВС к точке В. Вектор a CB направлен по линии, перпендикулярной ВС: 2 n aCB 22 lCB 2,8 c1 0,784 6 ,1 м 2 ; с a D – ускорение точки D, принадлежащей стойке, aD = 0; a CD – полное относительное ускорение точки С в ее вращательном движении относительно точки D; n a CD , a CD – нормальное и тангенциальное ускорение точки С в ее вращательном n движении относительно точки D. Вектор a CD направлен вдоль звена DС к точке D. Вектор a CD направлен по линии, перпендикулярной DС: 2 n aCD 32 lCD 7 ,5 c 1 0 ,4 22,5 м 2 . с Таким образом, имеем систему двух векторных уравнений с двумя неизвестными ( a CB , a CD ), которую решим графически путем построения плана ускорений (рис. 3, в). Через произвольную точку , принятую за полюс плана ускорений, проводим линию, параллельную АВ, и на ней откладываем произвольной длины вектор b , изображающий ускорение точки В. Определяем масштаб плана ускорений: n aBA Ka b 99,200 м 2 с 1,984 м 2 м . 50 мм с2 мм с2 мм Рассматриваем первое векторное уравнение для ускорения a C . Через точку n2 проводим прямую, параллельную звену ВС, и на ней, в выбранном масштабе, n откладываем отрезок bn2, изображающий на плане ускорений вектор a CB . Длина отрезка bn2: 6 ,1 м 2 n aCB с 3,05 мм 3 мм . bn2 м Ka 2 c 2 мм Через точку n2 перпендикулярно звену ВС проводим прямую, по которой направлен вектор a CB . 33 Согласно второму векторному уравнению системы через полюс проводим прямую, параллельную CD, и на ней, в выбранном масштабе, откладываем отрезок n3, n изображающий на плане ускорений вектор a CD . Длина отрезка n3: 22 ,5 м 2 n aCD с 11,25 мм 11 мм . n3 м Ka 2 c 2 мм Через точку n3 проводим прямую, перпендикулярную звену СD, представляющую собой линию действия вектора a CD . Пересечение прямых, перпендикулярных звеньям BC и CD, определяет положение точки с на плане ускорений. Вектор n2c , изображающий тангенциальное ускорение точки С относительно точки В, направлен от n2 к с. Модуль тангенциального ускорения точки С относительно точки В: м aCB n2c K a 72 мм 2 144 м 2 . 2 с с мм Вектор n3c , изображающий тангенциальное ускорение точки С относительно точки D , направлен от n3 к с. Модуль тангенциального ускорения точки С относительно точки D: aCD n3c K a 74 мм 2 м 148 м 2 . с с мм 2 Вектор c , изображающий абсолютное ускорение точки С, направлен от полюса к точке c. Модуль абсолютного ускорения точки С: aC c K a 75 мм 2 м 150 м 2 . с с мм 2 Соединив на плане ускорений точки b и с, найдем вектор, изображающий полное ускорение точки С относительно точки В. Он направлен от точки b к точке с. Модуль полного ускорения точки С относительно точки В: aCB bc K a 73 мм 2 м 146 м 2 . с с мм 2 Определяем ускорение центров масс звеньев исследуемого механизма, используя свойство подобия плана ускорений. 34 Ускорение центра масс кривошипа: n aBA aS 2 1 99,200 м 2 с 49,6 м 50 м . 2 с2 с2 Для нахождения ускорения центра масс шатуна нанесем точку S2 на середину отрезка bc плана ускорений и соединим ее с полюсом . Вектор s2 в масштабе Ka изображает на плане ускорений вектор абсолютного ускорения центра масс шатуна. Модуль ускорения центра масс шатуна: aS s2 K a 52 мм 2 2 м 104 м 2 . с с мм 2 Ускорение точки Е коромысла находим из пропорции: e DE , c DC откуда e c DE 75 мм 50 мм 94 мм . 40 мм DC Искомое значение ускорения точки Е: aE e K a 94 мм 2 м 188 м 2 . с с мм 2 Порядок определения ускорения a S3 центра масс коромысла аналогичен описанному для шатуна: aS s3 K a 47 мм 2 3 м 94 м 2 . с с мм 2 В соответствии с первым свойством планов ускорений векторы s1 , s2 , s3 , e направлены от полюса . Определяем мгновенные значения угловых ускорений звеньев: кривошип 1 = 0, так как 1= const; 144 м 2 a с 184 с 2 ; CB шатун 2 lBC 0,784 м 148 м 2 с 370 с 2 . коромысло 3 lСD 0,4 м aCD Для определения направления углового ускорения 2 шатуна мысленно переносим вектор тангенциального ускорения точки С относительно точки В (вектор n2c ) с плана 35 ускорений в точку С плана механизма. Угловое ускорение 2 направлено против часовой стрелки. Аналогично находим направление углового ускорения 3 коромысла. Вектор тангенциального ускорения точки С относительно точки D (вектор n3c ) мысленно переносим с плана ускорений в точку С плана механизма. Угловое ускорение 3 направлено против часовой стрелки. 1.4. Построение кинематических диаграмм движения выходного звена механизма от угла поворота кривошипа. Анализ полученных диаграмм Кинематической диаграммой называется кривая в прямоугольной системе координат, представляющая зависимость какого-либо параметра движения точки или звена механизма (перемещения, скорости или ускорения) от времени или угла поворота входного звена. Наибольший интерес, ввиду наглядности, представляют диаграммы, характеризующие изменение параметров движения выходного звена за один рабочий цикл механизма. Если выходное звено совершает поступательное движение (ползун), то строятся диаграммы, характеризующие зависимость линейного перемещения, линейной скорости и линейного ускорения одной из точек выходного звена (точка С ползуна) за время одного рабочего цикла механизма. Если выходное звено совершает возвратно-вращательное движение (коромысло), то строятся диаграммы, представляющие зависимость углового перемещения, угловой скорости и углового ускорения выходного звена (коромысла) за время одного рабочего цикла механизма. Последовательность построения кинематических диаграмм. 1. Строится диаграмма перемещений выходного звена или какой-либо точки на выходном звене путем непосредственного снятия замеров с плана механизма для 8–12 положений входного звена. 2. Графическим дифференцированием диаграммы перемещений строится диаграмма скорости исследуемой точки или звена механизма. 3. Графическим дифференцированием диаграммы скоростей строится диаграмма ускорений точки или звена механизма. Графическое дифференцирование производится методом хорд или методом касательных. С целью повышения точности удобно использовать оба метода одновременно. Рассмотрим порядок построения кинематических диаграмм на конкретных примерах механизмов. 36 1.4.1. Порядок построения кинематических диаграмм движения выходного звена кривошипно-ползунного механизма Рассмотрим кривошипно-ползунный механизм, изображенный на рис. 8,а. Исходные данные: lAB = 0.0192 м; lBС = 0.077 м; e = 0.021 м; 1 = 12 с-1. За один рабочий цикл механизма ползун совершает движение из одного крайнего положения 0 (ноль) в другое крайнее положение 6/ (рабочий ход), а затем возвращается в исходное положение 0 (холостой ход). При этом кривошип совершает один полный оборот из положения А–0. Время одного рабочего цикла механизма равно́ времени одного полного оборота кривошипа tоб, которое определяется по формуле 2 2 3.14 0.523 с 1 . 1 12 t об Диаграмма перемещения ползуна (рис. 10, а). Проводим горизонтальную ось t (время) и на ней откладываем отрезок L = 0–0 произвольной длины, изображающий время одного рабочего цикла ползуна. Полученный отрезок делим на 12 частей – по числу положений механизма на плане. Приняв L = 180 мм, определим масштаб диаграммы Sc(t) перемещения ползуна по оси абсцисс t об 0.523 0.0029 с мм . L 180 t Длина отрезка 0–6/, обозначающего время движения ползуна из крайнего ближнего положения 0 в крайнее дальнее положение 6/, мм: l06 / рх ω1μ t 3.292 94.6 мм . 12 0.0029 где φрх – угол поворота кривошипа, соответствующий движению ползуна из крайнего ближнего положения 0 в крайнее дальнее положение 6/, рх 188 .7 0 3.14 рад 3.292 рад . 180 0 Обозначаем точку 6/ на оси времени t. Масштаб диаграммы S(t) по оси ординат находится по формуле S Sп 0.04 0.0005 м мм , Smax 80 где S п 0.04 м – ход ползуна; Smax = 80 мм – максимальная ордината по оси S, соответствующая величине S п . 37 Рис. 10. Кинематические диаграммы движения выходного звена (ползуна) кривошипно-ползунного механизма 38 В целях компактности построения рекомендуется значение Smax принимать из диапазона (40÷100) мм, а значение L – из диапазона (120÷220) мм. Для текущего i-го положения ползуна (точки 0, 1÷11 на направляющей) ордината по оси S рассчитывается из выражения Si 0i K l , S где 0i – длина отрезка, соединяющего крайнее положение ползуна 0 и его текущее положение, мм; Kl – масштаб плана механизма, м/мм. Соединяя полученные точки плавной кривой, получим диаграмму перемещения ползуна в функции времени его движения. Поскольку кривошип вращается с постоянной угловой скоростью ω1, то по оси абсцисс можно откладывать не только время t, но и углы поворота φ1 кривошипа 1 из 0го положения. Тогда диаграмма Sc(t) , будет одновременно являться и диаграммой Sc(φ1). Масштаб диаграммы Sc(φ1) по оси абсцисс находится по формуле 2π 6.28 0.0349 рад мм . L 180 Диаграмма скорости ползуна (рис. 10, б). Имея диаграмму перемещения ползуна Sc(t), можно получить диаграмму его скорости Vc(t) путем графического дифференцирования. Рассмотрим последовательность построения диаграммы Vc(t) методом хорд. 1. На диаграмме Sc(t) проводим хорды 0a, ab, bc и т.д., соединяющие ординаты соседних характерных точек (для 12 положений ползуна). 2. Строим оси координат V и t для диаграммы скорости ползуна. Разметку по оси времени t на диаграмме Vc(t) принимаем ту же, что и на диаграмме Sc(t). На продолжении оси абсцисс (влево от точки 0) откладываем отрезок 0Pv = Hv = 30 мм, называемый полюсное расстояние. Рекомендуемый диапазон значений 0Pv составляет (30÷60) мм. 3. Из полюса Pv проводим лучи Pv a/, Pv b/, Pv c/ и т.д., параллельные хордам 0a, ab, bc и т.д. до пересечения с осью ординат в точках a/, b/, c/, …. 4. Из точек a/, b/, c/, … проводим горизонтальные линии до пересечения в точках 1//, 2// 3// с вертикальными прямыми, проходящими через середины отрезков 0–1, 1–2, … 11–0 на оси времени t. 5. Соединяя полученные точки плавной кривой, строим диаграмму скорости ползуна в функции времени t его движения или угла φ1 поворота кривошипа. 6. Определяем масштаб диаграммы Vc(t) по оси ординат 39 V μs 0.0005 0.00575 м с мм . H vμ t 30 0.0029 Диаграмма ускорения ползуна ac(t) строится путем графического дифференцирования зависимости Vc(t) (рис. 10, в). Порядок графического дифференцирования Vc(t) аналогичен описанному выше для диаграммы Sc(t). Масштаб диаграммы ac(t) по оси ординат: a μv 0.00575 0.0661 м с мм . H aμ t 30 0.0029 Примечание. 1) При дифференцировании графика Vc(t) необходимо обратить внимание на определение величины ускорения в 0-м положении ползуна. Для этого надо воспользоваться хордой 0//–1//, продолжив график Vc(t) в следующий цикл движения ползуна. 2) Для определения ординаты на диаграмме ac(t) в положении 6/ по оси времени (крайнее дальнее положение ползуна) необходимо вначале через соответствующую нулевую точку на диаграмме Vc(t) провести касательную к графику. Указанная / касательная образует угол 6 с осью времени t. Далее через полюс Pa на диаграмме ac(t) под углом 6 проводится луч до пересечения с осью ординат. Через полученную точку проводится горизонталь до пересечения с вертикальной прямой, проходящей через точку 6/ на оси времени t. Ордината точки, полученной в результате пересечения указанных прямых, определяет ускорение (в масштабе a 0.0661 м с мм ) ползуна в положении 6/ по оси времени t. / Анализ полученных диаграмм Полученные кинематические диаграммы можно условно сгруппировать на две пары: Sc(t) и Vc(t) , а также Vc(t) и ac(t). Каждая из диаграмм, образующих условную пару, является по отношению друг к другу соответственно интегральной и дифференциальной кривой. Для проверки (анализа) правильности построения диаграмм следует руководствоваться следующими закономерностями. 1. Экстремальным значениям ординат интегральной кривой соответствуют нулевые значения ординат дифференциальной кривой. 2. Точкам перегиба интегральной кривой соответствуют экстремальные значения ординат дифференциальной кривой. 3. Возрастающим ординатам интегральной кривой соответствуют положительные значения ординат дифференциальной кривой. Убывающим ординатам – отрицательные значения ординат дифференциальной кривой. 40 1.4.2. Порядок построения кинематических диаграмм движения выходного звена кривошипно-коромыслового механизма Рассмотрим кривошипно-коромысловый механизм, изображенный на рис. 9, а. Исходные данные: lAB = 0.248 м; lBС = 0.784 м; lCD = 0.400 м; lDE = 0.500 м ; lAD = 0.706 м, 1 = 20 с-1. За один рабочий цикл механизма коромысло совершает движение из одного крайнего положения 0 (ноль) в другое крайнее положение 4/ (рабочий ход), а затем возвращается в исходное положение 0 (холостой ход). При этом кривошип совершает один полный оборот из положения А–0. Время одного рабочего цикла механизма равно́ времени одного полного оборота кривошипа tоб, которое определяется по формуле 2 2 3.14 0.314 с 1 . 1 20 t об Диаграмма углового перемещения коромысла (рис. 11, а). Проводим горизонтальную ось t (время) и на ней откладываем отрезок L = 0–0 произвольной длины, изображающий время одного рабочего цикла коромысла. Полученный отрезок делим на 8 частей – по числу положений механизма на плане. Приняв L = 180 мм, определим масштаб диаграммы α(t) углового перемещения коромысла по оси абсцисс t об 0.314 0.00174 с мм . L 180 t Длина отрезка 0–4/, обозначающего время движения коромысла из крайнего дальнего положения 0 в крайнее ближнее положение 4/, мм l0 4 / рх ω1μ t 3.464 99.5 мм . 20 0.00174 где φрх – угол поворота кривошипа, соответствующий движению коромысла из крайнего дальнего положения 0 в крайнее ближнее положение 4/, рх 198.6 0 3.14 рад 180 0 3.464 рад . Обозначаем точку 4/ на оси времени t. 41 Рис. 11. Кинематические диаграммы движения выходного звена (коромысла) кривошипно-коромыслового механизма 42 Масштаб диаграммы α(t) по оси ординат находится по формуле 1.57 max 0.0196 рад мм , Ymax 80 где max 1300 400 3.14 рад рад 1.57 рад – угол размаха коромысла; 0 180 2 Ymax = 80 мм – максимальная ордината по оси ординат (α), соответствующая величине max 1.57 рад . В целях компактности построения рекомендуется значение Ymax принимать из диапазона (40÷100) мм, а значение L – из диапазона (120÷220) мм Для текущего i-го положения коромысла (точки 0; 1; … 8 на дуге радиусом DC) ордината по оси α рассчитывается из выражения Yi i , где i – угол между крайним дальним положением коромысла и его текущим положением, рад. Соединяя полученные точки плавной кривой, строим диаграмму углового перемещения коромысла в функции времени его движения. Поскольку кривошип вращается с постоянной угловой скоростью ω1, то по оси абсцисс можно откладывать не только время t, но и углы поворота φ1 кривошипа 1 из 0-го положения. Тогда диаграмма α (t) будет одновременно являться и диаграммой α (φ1). Масштаб диаграммы α (φ1) по оси абсцисс находится по формуле 2π 6.28 0.0349 рад мм . L 180 Диаграмма угловой скорости ω3(t) коромысла строится путем графического дифференцирования зависимости α (t) (рис. 11, б). Диаграмма углового ускорения ε3(t) коромысла строится путем графического дифференцирования диаграммы ω3(t) (рис. 11, в). Порядок графического дифференцирования диаграмм α(t) и ω3(t) аналогичен описанному ранее для диаграмм Sc(t) и Vc(t), построенным для кривошипно-ползунного механизма (см. пп. 1.4.1). Масштаб диаграмм ω3(t) и ε3(t) по оси ординат: μ 0.0196 0.3755 рад с мм ; H μ t 30 0.00174 μ 0.3755 7.1931 рад с2 мм . H μt 30 0.00174 Для проверки (анализа) правильности построения диаграмм α(t), ω3(t) и ε3(t) следует руководствоваться закономерностями, приведенными в пп. 1.4.1. 43 1.5. Кинетостатический анализ механизма Целью кинетостатического (силового) анализа любого механизма является определение сил, действующих на звенья механизма по заданному закону их движения. В ходе выполнения кинетостатического анализа решаются следующие задачи: - определение сил тяжести и сил инерции масс звеньев; - определение реакций во всех кинематических парах механизма; - определение уравновешивающей силы или уравновешивающего момента. Для выполнения кинетостатического анализа механизма используется известный из теоретической механики принцип Даламбера для механической системы: если к материальным точкам движущейся механической системы, кроме фактически действующих на них активных сил и реакций связей, условно приложить также силы инерции точек, то получим уравновешенную систему сил, к которой можно применить все уравнения статики. Кроме принципа Даламбера, для определения уравновешивающей силы (уравновешивающего момента) применяется также специальный расчетный метод, предложенный профессором Жуковским. Этот метод называется рычагом Жуковского. Суть его состоит в следующем. Если заданные силы (включая силы инерции), действующие в рассматриваемый момент времени на звенья механизма, перенести в одноименные точки повернутого на 900 плана скоростей, не изменяя при этом величины и направления этих сил, и составить уравнение моментов всех сил относительно полюса Р, то план скоростей можно рассматривать как жесткий рычаг с опорой в полюсе Р, находящийся под действием всех рассматриваемых сил в равновесии. Поворачивать план скоростей можно в любом направлении на угол 90 0, не меняя при этом точки приложения и направления сил, взятых с плана механизма. Достоинством рычага Жуковского (в отличие от уравнений равновесия сил по принципу Даламбера) является то, что с его помощью можно просто и быстро определить требуемую величину уравновешивающей силы, минуя трудоемкое определение реакций в кинематических парах. Порядок выполнения кинетостатического анализа рассмотрим на конкретных примерах механизмов. 1.5.1. Кинетостатический анализ кривошипно-ползунного механизма Расчет сил тяжести звеньев, а также сил инерции и моментов сил инерции масс звеньев (рис. 8, а) Исходные данные: lAB = 0.0192 м; lBС = 0.0768 м; e = 0.0206 м; φ0 = 300; ε2 = 16.2 с-2; aS 1 = 1.38 м/c2 ; aS 2 = 2.5 м/c2 aS 3 = ac = 2.45 м/c2, q = 100 кг/м. 44 Силы тяжести звеньев: кривошип G1 = qrg = 100 кг/м·0,0192 м·9,8 м/с2 = 18,8 Н; шатун G2 = q g = 100 кг/м·0,0768 м·9,8 м/с2 = 75,2 Н; ползун G3 = m3 g = 15 кг·9,8 м/с2 = 147 Н. Векторы G1 , G 2 , G3 приложены в центрах масс соответствующих звеньев и направлены вертикально вниз. Силы инерции масс звеньев: кривошип PИ qraS 100 кг/м 0.0192 м 1.38 м/c 2 2.64 Н ; 1 1 шатун PИ qlaS 100 кг/м 0.0768 м 2.5 м/c 2 19.2 Н ; 2 2 ползун Pи maS 15 кг 2.45 м с 2 36.75 Н . 3 3 Векторы P И1 , P И 2 , P И3 приложены в центрах масс соответствующих звеньев и направлены противоположно ускорениям a S1 , a S 2 , a S3 центров масс (рис. 8, в). Момент сил инерции массы шатуна 3 3 3 -2 М I s 2 0,1q 2 0,1·100 кг/м ·0,0768 м ·16,2 м/с = 0,07 Нм. и2 Момент сил инерции шатуна направлен противоположно его угловому ускорению 2 . Определение реакций в кинематических парах и уравновешивающего момента из условия равновесия сил. Исходные данные: lAB = 0.0192 м; lBС = 0.0768 м; e = 0.0206 м; φ0 = 300; G1 = 18,8 Н; G2 = 75.2 Н; G3 = 147 Н; PИ 2.64 Н ; PИ 19.2 Н ; Pи3 36.75 Н ; M И 0.07 Нм . 1 2 2 Рассмотрим равновесие группы Ассура, образованной звеньями 2–3 (рис. 12, а). Строим план нагружения группы Ассура. Вычерчиваем в масштабе группу 2–3. Положение звеньев должно быть таким же, как и на плане механизма при заданном значении угла 0 . В соответствующих точках прикладываем силы тяжести и силы инерции масс звеньев, а также момент сил инерции звена 2. При этом необходимо помнить, что векторы силы инерции направлены противоположно векторам ускорений центров масс, а вектор момента сил инерции – противоположно угловому ускорению звена. К ползуну вдоль направляющей должна быть приложена сила полезного сопротивления Q , направленная противоположно вектору скорости ползуна и действующая только во время рабочего хода (если в заданном положении звенья находятся в зоне холостого хода, то сила полезного сопротивления отсутствует). Реакцию в кинематической паре В (силу взаимодействия 1-го и 2-го звеньев) показываем в виде двух составляющих: R12n – направленной вдоль звена 2 и R12 – направленной перпендикулярно звену 2. 45 а) б) в) г Рис. 12. Кинетостатический анализ кривошипно-ползунного механизма Реакция в кинематической паре D (сила взаимодействия 3-го и 4-го звеньев) R43 направлена перпендикулярно направляющей. Составим уравнения равновесия группы Ассура: Pi 0 ; R12 R12 G2 Ри2 G3 Ри3 R43 0 ; M ( P ) 0; c n К G hG Ри h p i 2 2 2 R12 BC - M 0 , и2 и2 откуда 12 R К ( Ри h G hG ) M и К ВС 2 2 и2 2 2 0,0005 м/мм (19,2 Н 50 мм 15,2 Н 72 мм) 0,07 Нм 28 Н . 0,0005 м/мм 153,6 мм Знак «–» означает, что сила указанной на схеме нагружения. R12 направлена в сторону, противоположную 46 Для нахождения R12n и R43 строим план сил (рис. 12, б). Выбираем масштаб плана сил: Кр Н , ab мм 28 Н R12 К р 14 мм 2 Н/мм , где аb – длина вектора, изображающего R12 на плане сил. Начиная с R12 , строим последовательно в выбранном масштабе векторы всех известных сил, приложенных к звену 2, затем векторы всех известных сил, приложенных к звену 3. Через начало вектора, изображающего R12 , проводим линию, параллельную звену 2 (по ней направлен вектор R12n ). Через конец последнего вектора известных сил проводим линию, перпендикулярную направляющей ползуна (по ней направлен вектор R43 ). Направление векторов, изображающих на плане сил реакции R12n и R43 , определяется исходя из того, что в замкнутом многоугольнике сил конец одного вектора является началом другого вектора. Для нахождения реакции R12 соединяем начало вектора, изображающего реакцию R12 , с концом вектора, изображающего реакцию R12n . Полученный вектор (направлен навстречу R12n и R12 ) показывает на плане сил реакцию R12 . Для нахождения силы взаимодействия между шатуном 2 и ползуном 3 (реакция в кинематической паре С) рассмотрим условия равновесия звена 2 и звена 3 отдельно: R12 G 2 Ри 2 R32 0 ; G 3 Р и 3 R 43 R 23 0 . Соединим начало вектора, изображающего реакцию R12 , и конец вектора, изображающего силу инерции PИ 2 . Полученный вектор показывает на плане сил реакцию R32 . Из плана сил ясно, что эта же линия замыкает многоугольник сил, действующих на звено 3, т.е. R23 R32 . Замерив длины построенных векторов и умножив их на масштаб плана сил, получим: R12 = 40 мм · 2 Н/мм = 80 Н ; R23 = 20 мм · 2 Н/мм = 40 Н; R43 = 82 мм · 2 Н/мм = 164 Н. Рассмотрим условия равновесия входного звена 1 (рис. 12, в). Строим план нагружения входного звена. Для этого вычерчиваем в масштабе кривошип в заданном положении 0 . Прикладываем в центре масс силу тяжести G1 и силу инерции массы PИ1 . В точке А произвольно прикладываем реакцию R41 (силу взаимодействия стойки 4 и кривошипа 1). В точке В прикладываем силу взаимодействия второго звена с первым: R21 R12 . В точке В перпендикулярно звену АВ прикладываем уравновешивающую силу Pур . 47 Составляем уравнения равновесия входного звена: P i 0 ; R G Ри R 41 1 М P 0 ; ( А) Р ур 21 Рур 0 ; G h R h R i 1 G h R hR 1 1 21 1 АВ 21 1 21 21 Р ур АВ 0 ; 18,8Н 6 мм 80 Н 37 мм 83 Н . 38,4 мм Реакцию R41 находим путем построения плана сил (рис. 12, г). Из плана сил находим: R41 = 20 мм · 1 Н/мм = 20 Н . Определяем уравновешивающий момент, из условий равновесия звеньев: Mур = Рур AB = 83 Н · 0,0192 м = 1,594 Нм. Определение уравновешивающей силы (уравновешивающего момента) методом профессора Жуковского Исходные данные: lAB = 0.0192 м; lBС = 0.0768 м; e = 0.0206 м; φ0 = 300; G1 = 18,8 Н; G2 = 75.2 Н; G3 = = 147 Н; PИ 2.64 Н ; PИ 19.2 Н ; Pи3 36.75 Н ; M И 0.07 Нм 2 1 2 (рис. 8, а; б). Вычерчиваем план скоростей, повернутый вокруг полюса на угол 900 противоположно угловой скорости входного звена (рис. 13). В соответствующих точках прикладываем все силы, приложенные к звеньям механизма (кроме реакций в кинематических парах). Рис. 13. Определение Pур методом профессора Жуковского (на примере кривошипно-ползунного механизма) 48 Момент сил инерции массы второго звена заменяем парой сил инерции Р2 и Р2 , приложенных в точках В и С и направленных так, чтобы направление вращения под действием пары сил Р2 Р2 было таким же, как и под действием момента сил инерции M И 2 : Р 2 Р2 Ми ВС 2 0,07 Нм = 0,9 Н. 0,0768 м Запишем условие равновесия плана скоростей как жесткого рычага относительно полюса р: М ( р ) Pi 0 ; Pур pb P2/ вс Ри2 h p (G1 G2) hG1 Pи3 рс 0 . и2 Из этого уравнения находим силу Pур. Pур/ (G1 G 2) hG1 Pи h Pи рс Р2 вс 2 p 3 и2 рв = (18,8 75,2)40 19 ,255 36 ,7584 0,985 85 Н . 92 Вычислим уравновешивающий момент, определяемый по методу проф. Н.Е. Жуковского: / / M ур Pур l AB 85 Н 0.0192 м 1.632 Нм Погрешность определения уравновешивающего момента разными способами: M ур / M ур M ур Значение M / ур 100 % M ур 5% 1.594 1.632 100 % 2.3% 5% 1.594 . показывает, что результаты расчетов уравновешивающего момента, выполненных разными методами, имеют хорошее совпадение. 1.5.2. Кинетостатический анализ кривошипно-коромыслового механизма Расчет сил тяжести звеньев, а также сил инерции и моментов сил инерции масс звеньев (рис. 9, а) Исходные данные: lAB = 0.248 м; lBС = 0.784 м; lCD = 0.400 м; lDE = 0.500 м; φ0 = 300; ε2 = 184 с-2; ε3 = 370 с-2; aS 1 = 50 м/c2 ; aS 2 = 104 м/c2 ; aS 3 = 94 м/c2 ; q 10 кг / м . 49 Силы тяжести звеньев: кривошип G1 m1 g q r g 10 кг 0,248 м 10 м м шатун G2 m2 g q lBC g 10 кг 0,784 м 10 м м с2 с2 24,8 H 25 Н ; 78,4 H 78 Н ; коромысло G3 m3 g q lDE g 10 кг 0,5 м 10 м м с2 50 H . Векторы G1 , G 2 , G3 приложены в центрах масс соответствующих звеньев и направлены вертикально вниз. Силы инерции масс звеньев: кривошип Pи q r aS 10 кг 0,248 м 50 м м 1 1 с2 124 H ; шатун Pи q lBC aS 10 кг 0,784 м 104 м м 815 H ; с2 коромысло Pи q lDE aS 10 кг 0,5 м 94 м 470 H . м с2 2 2 3 3 Векторы P И1 , P И 2 , P И3 приложены в центрах масс соответствующих звеньев и направлены противоположно ускорениям a S1 , a S 2 , a S3 центров масс (рис. 9, в). Моменты сил инерции масс звеньев: 0,1 q l 3 шатун M и I S 2 0,1 q lBC 2 0,110 кг 0,784 м 3 184 с-2 89 H м ; м 2 2 коромысло M и I S 3 3 3 3 DE кг 0,5 м 3 370 с-2 46 H м . 3 0,110 м Моменты M и 2 , M и3 направлены противоположно угловым ускорениям 2, 3 соответственно. Определение реакций в кинематических парах и уравновешивающего момента из условия равновесия сил Исходные данные: lAB = 0.248 м; lBС = 0.784 м; lCD = 0.400 м; lDE = 0.500 м; φ0 = 300; G1 25 Н ; G2 78 Н ; G3 50 H ; Pи 124 H ; Pи 815 H ; Pи 470 H ; M и 89 H м ; 1 2 3 2 M и 46 H м . 3 Рассмотрим равновесие группы Ассура, образованной звеньями 2–3 (рис. 14, а). Вычерчиваем в масштабе Kl отдельно группу 2–3, располагая звенья так же, как на плане механизма для заданного (0) положения входного звена (кривошипа). В точках S2, S3 прикладываем силы тяжести G 2 , G3 и силы инерции P и2 , P и3 . К звеньям 2, 3 прикладываем соответствующие моменты сил инерции M и2 , M и3 . 50 51 Звенья исследуемого механизма находятся в зоне рабочего хода, поэтому к коромыслу DC в точке Е прикладываем силу полезного сопротивления Q . Направление вектора силы Q противоположно вектору V E линейной скорости точки Е . Если в заданном положении звенья механизма находятся в зоне холостого хода, то сила Q отсутствует. Реакцию в кинематической паре В (силу взаимодействия 1 и 2 звеньев) показываем n в виде 2-х составляющих: R12 – направленной вдоль звена 2 и R12 – направленной перпендикулярно звену 2. Реакцию в кинематической паре D (силу взаимодействия 3 и 4 звеньев) также n представляем в виде 2-х составляющих: R 43 – направленной вдоль звена 3 и R 43 направленной перпендикулярно звену 3. Составляем уравнения равновесия группы 2–3: Pi 0 ; n R12 BC G2 hG2 Pи2 hи2 M P 0 ; R43 CD G3 hG3 Pи3 hи3 C n R12 R12 P и2 G 2 Q P и3 G 3 R 43 R 43 0 ; M P 0 ; C – i2 i3 M и2 Ke M и3 Ke 0; Q CE 0 , Откуда: R12 G2 hG Pи hи 2 2 2 Mи 78 Н 38 мм 815 Н 14 мм 2 Ke BC R43 Q CE 78,4 мм Mи Ke 3 89 Н м м 0 ,01 с мм 69 Н , G3 hG Pи hи 3 3 3 CD 46 Н м 300 Н 10 мм 50 Н 11 мм 470 H 15 мм м 0 ,01 с мм 0. 40 мм n n Для нахождения R12 и R 43 строим план сил (рис. 14, б). Определяем масштаб плана сил: R12 69 H Kp 19 ,7 Н 20 Н , мм мм a b 3,5 мм где ab– длина вектора, изображающего R12 на плане сил, мм. 52 Начиная с R12 , строим последовательно в выбранном масштабе векторы всех известных сил, приложенных к звену 2. Затем откладываем векторы всех известных сил, приложенных к звену 3. Через начало вектора, изображающего R12 , проводим линию, параллельную звену 2 (по ней направлен вектор n R12 ). Через конец вектора, изображающего R 43 , проводим линию, параллельную звену 3 (по ней направлен n вектор R 43 ). n n Направления векторов, изображающих на плане сил реакции R12 и R 43 , определяются исходя из того, что в замкнутом многоугольнике сил конец одного вектора является началом другого вектора. Для нахождения реакции R12 соединяем начало вектора, изображающего на плане сил n составляющую R12 , с концом вектора, изображающего на плане сил составляющую R12 . n Полученный вектор R12 направлен навстречу векторам R12 и R12 . Аналогично определяем реакцию R 43 . Для нахождения силы взаимодействия между шатуном 2 и коромыслом 3 (реакция в кинематической паре С) рассмотрим условия равновесия звена 2 и звена 3 отдельно: R12 P и 2 G 2 R 32 0; Q P и3 G 3 R 43 R 23 0. Соединим начало вектора, изображающего реакцию R12 , и конец вектора, изображающего вектор силы G 2 . Полученный вектор показывает на плане сил реакцию R 32 . Из плана сил видно, что линии действия векторов, изображающих реакции R 23 , R 32 совпадают, так как R 23 R 32 . Замерив длины построенных векторов и умножив их на масштаб Кр плана сил, получим: R12 R21 134 мм 20 Н мм 2680 Н , R23 R32 98 мм 20 Н 1960 Н , мм R43 R34 87 мм 20 Н 1740 Н . мм 53 Рассмотрим условия равновесия входного звена 1. Строим план нагружения входного звена. Вычерчиваем в масштабе Kl кривошип в заданном ( 0) положении (рис. 14, в). Прикладываем в центре масс силу тяжести G1 и силу инерции массы P и1 . В точке А произвольно прикладываем реакцию R 41 (силу взаимодействия стойки и n кривошипа) либо ее составляющие R 41 , R 41 . В точке В прикладываем силу взаимодействия звена 2 со звеном 1: R 21 R12 . В точке В, перпендикулярно звену АВ, прикладываем уравновешивающую силу Р ур . Составляем уравнения равновесия входного звена: P i 0; M A Pi 0 ; R 41 G1 P и1 R 21 P ур 0 ; G1 hG1 R21 h21 Pур AB 0 . Модуль силы Р ур : Pур G1 hG R21 h21 1 AB 25 Н 11 мм 2680 Н 9 мм 975,8 Н . 25 мм Реакцию R 41 находим путем построения плана сил в масштабе Кр (рис. 14, г). Модуль реакции R 41 : R41 R14 130 мм 20 Н 2600 Н мм . ределяем уравновешивающий момент из условия равновесия входного звена: M ур Pур l AB 975,8 H 0,248 м 241,998 H м 242 H м . Определение уравновешивающей силы (уравновешивающего момента) методом профессора Жуковского Исходные данные: lAB = 0.248 м; lBС = 0.784 м; lCD = 0.400 м; lDE = 0.500 м; φ0 = 300, 1 = 20 с-1, G1 25 Н , G2 78 Н , G3 50 H , Pи 124 H , Pи 815 H , Pи 470 H , 1 2 3 M и 89 H м , M и 46 H м , Q = 300 Н (рис. 9, а; б). 2 3 Вычерчиваем план скоростей, повернутый вокруг полюса на угол 90 противоположно угловой скорости входного звена. В соответствующих точках прикладываем силы, приложенные к звеньям механизма (кроме реакций в кинематических парах, рис. 15). 54 Рис. 15. Определение Pур методом профессора Жуковского (на примере кривошипно-коромыслового механизма) Момент сил инерции массы звена 2 (шатун) заменяем парой сил инерции Р2 и Р2 , приложенных в точках В и С и направленных так, чтобы направление вращения под действием пары сил Р2 Р2 было таким же, как и под действием момента сил инерции M и2 . Модуль сил, образующих пару с моментом M и2 : Р2 P2 Mи 2 l BC 89 H м 114 H . 0 ,784 Аналогично поступаем с моментом M и3 сил инерции массы звена 3 (коромысло): Р3 Р3 Mи 3 l DC 46 H м 115 H . 0 ,4 Запишем условие равновесия плана скоростей как жесткого рычага относительно полюса p: M p Pi 0 ; Pур pb Q pe Pи3 hи3 Pи2 hи2 G3 hG3 G1 hG1 G2 hG2 P2 bc P3 pc 0, откуда 55 Pур Q pe Pи3 hи3 Pи 2 hи 2 G3 hG3 G1 hG1 G 2 hG2 P2 bc P3 pc pb 300 H 37 ,5 мм 470 H 18 мм 815 H 28 мм 25 H 24 мм 78 H 32 мм 50 мм 50 Н 14 мм 114 Н 23 мм 115 Н 30 мм 943 Н . 50 мм Вычислим уравновешивающий момент, определяемый по методу профессора Н.Е. Жуковского: Pур l AB 943 H 0,248 м 234 H м . M ур Погрешность определения уравновешивающего момента разными способами: M ур M ур M ур Значение M ур M ур 5% 100% 242 H м 234 H м 100% 3,3% 5% . 242 H м показывает, что результаты расчетов уравновешивающего момента, выполненных разными методами, имеют хорошее совпадение. 2. СИНТЕЗ КУЛАЧКОВОГО МЕХАНИЗМА Кулачковым механизмом называется трехзвенный механизм, состоящий из стойки и двух подвижных звеньев (кулачка и толкателя или коромысла), связанных между собой посредством высшей кинематической пары. Входным звеном в кулачковом механизме всегда является кулачок, выходным звеном – толкатель (остроконечный, роликовый, плоский) или роликовое коромысло. Механизм служит для воспроизведения заданного периодического закона движения выходного звена. Основная задача синтеза кулачковых механизмов состоит в определении формы профиля и размеров кулачка. Параметрами, влияющими на форму профиля и размеры кулачка, являются допустимый угол давления, закон изменения скорости и ускорения выходного звена, максимальное перемещение выходного звена (ход толкателя или угол размаха коромысла), минимальный радиус кривизны профиля кулачка. 2.1. Построение кинематических диаграмм аналога ускорения, аналога скорости и перемещения выходного звена в функции угла поворота кулачка Первым этапом синтеза кулачкового механизма является определение минимального радиуса кривизны профиля кулачка. Для этого предварительно 56 необходимо знать закон движения выходного звена (толкателя или коромысла) кулачкового механизма. Законом движения выходного звена называется функция его перемещения (линейного или углового), а также одна из производных перемещения, взятых по времени или углу поворота кулачка. В последнем случае первая и вторая производные перемещения выходного звена называются соответственно аналог скорости и аналог ускорения выходного звена (толкателя или коромысла). Выбор закона движения выходного звена определяется требованиями плавности и бесшумности работы кулачкового механизма. Наиболее целесообразным с динамической точки зрения является закон изменения ускорения выходного звена, поскольку именно значения ускорений определяют величину сил инерции, возникающих при работе кулачкового механизма. В исходных данных на курсовую работу студенту задается один из трех законов изменения ускорения (линейного или углового) выходного звена: синусоидальный, косинусоидальный и равномерно убывающий (линейный). Каждый из этих законов обеспечивает плавную и безударную работу кулачкового механизма. При выполнении курсовой работы студентом вначале строится диаграмма изменения аналога ускорения выходного звена, по которой графическим интегрированием определяется закон изменения аналога скорости выходного звена, а затем, вторичным графическим интегрированием, – закон перемещений выходного звена. Рассмотрим порядок построения кинематических диаграмм движения выходного звена кулачкового механизма на конкретных примерах. 2.1.1. Кулачковый механизм с роликовым толкателем. Синусоидальный закон изменения ускорения толкателя Исходные данные: - ход толкателя Smax =40 мм = 0,04 м; - наибольший допускаемый угол давления = 20°; - закон изменения ускорений толкателя − синусоидальный; - величина эксцентриситета е = 0,02 м; - фаза удаления толкателя Ф1 = 120°; - фаза верхнего выстоя Ф2 = 20°; - фаза приближения толкателя Ф3 = 80°; - фаза нижнего выстоя Ф4 = 140°; - угловая скорость кулачка = 10 c-1. 2 Вначале строится диаграмма аналога ускорений d S2 () по заданному закону d изменения ускорения толкателя (рис. 16, а). 57 Рис. 16. Кинематические диаграммы движения роликового толкателя 58 Масштаб угла поворота кулачка, рад/мм: K 2 6.28 0.0174 рад / мм , L 360 где L – длина отрезка, изображающего угол равный 2π радиан, L = 360 мм. Максимальное значение аналога ускорения Y3// max , соответствующее меньшей фазе (Ф3 < Ф1), принимаем равным Y3// max 80 мм , а Y1// max находим из соотношения: // (Ф1 ) 2 Y3 max , (Ф 3 ) 2 Y // 1 max // откуда Y1 max (Ф 3 ) 2 Y // 3 max 2 (Ф1 ) 80 2 80 36 мм . 120 2 Для построения синусоиды на первой фазе Ф1 определяем значения Y1i// , используя выражение Y1i// Y // 1 max sin 2 1i Ф1 . Значения Y3i// , для построения синусоиды на третьей фазе Ф3, определяем из выражения Y3//i Y // 3 sin 2 3 i max Ф3 . Для получения диаграммы dS () проведем графическое интегрирование аналога d 2 ускорения d S2 () . d Для этого (рис. 16, б): - на продолжении оси φ, на расстоянии H1 = 40 мм, отмечаем точку Р1; - на середине интервала 0-1 находим ординату аb; - проводим линию bb1 параллельно оси φ; - соединяем точку Р1 с точкой b1; - параллельно лучу Р1b1 на интервале 0–1 диаграммы dS () проводим линию 01/ до d пересечения с вертикалью, проходящей через отметку 1; - через середину интервала 1–2 строим ординату cd; - проводим линию dd1 параллельно оси φ; 59 - соединяем точку P1 c точкой d1; - параллельно лучу Р1d1 на интервале 1-2 диаграммы dS () проводим линию 1/2/ d до пересечения с вертикалью, проходящей через отметку 2; - выполняя дальнейшие построения на всех интервалах, получим кривую dS () . d Аналогично, интегрируя кривую dS () , получим кривую S(φ), приняв расстояние d H2 = 40 мм и отметив точку Р2 на продолжении оси φ кривой dS () (рис. 16, в). d Величины отрезков H1 и H2 могут быть выбраны любые, удобные для построения. Они определяют значения масштабных коэффициентов K dS , K d 2 S построенных d диаграмм. Определяем масштабы полученных диаграмм: - масштаб перемещений толкателя K S S max / Ymax 0.04 м/54 мм 0.74 10 -3 м/мм , где Ymax – максимальное значение ординаты с графика S(φ); - масштаб аналога скорости толкателя K dS KS /( H 2 K ) 0.74 10 3 /( 40 1.74 10 2 ) 1.06 10 3 м/мм ; d - масштаб аналога ускорения толкателя K d S K ds /( H1 K ) 1.06 103 /( 40 1.74 10 2 ) 1.52 103 м/мм ; 2 d 2 d - масштаб времени K t K / к 1.74 10 2 / 10 1.74 10 3 с / мм ; - масштаб скорости толкателя K v K dS к 1.06 103 10 1.06 102 м/с мм d - масштаб ускорения толкателя K а K d S ( к )2 1.52 103 102 1.52 101 м/с 2 мм . 2 d2 60 d 2 2.1.2. Кулачковый механизм с роликовым коромыслом. Косинусоидальный закон изменения ускорения коромысла Исходные данные: - угол размаха коромысла β 0max 30 0 ; - наибольший допустимый угол давления max = 20°; - длина коромысла l = 0,1 м; - закон изменения ускорения − косинусоидальный; - фаза удаления коромысла Ф1 = 100°; - фаза верхнего выстоя Ф2 = 30; - фаза приближения коромысла Ф3 = 120; - фаза нижнего выстоя Ф4 = 110; - угловая скорость кулачка = 20 с-1. 2 Строим диаграмму аналога ускорений d 2 () для заданного (косинусоидального) d закона изменения ускорения толкателя (рис. 17, а) Масштаб угла поворота кулачка принимаем тот же, что и для рассмотренного ранее в пп. 2.1.1 случая: K 0.0174 рад / мм . Максимальное значение ускорения Y1// max , соответствующее меньшей фазе (Ф1 < Ф3), принимаем равным Y1// max 80 мм . Значение Y3// max находится из соотношения: // (Ф1 ) 2 Y3 max , (Ф 3 ) 2 Y // 1 max // откуда Y3 max (Ф1 ) 2 Y // 1 max 2 (Ф 3 ) 100 2 80 56 мм . 120 2 2 Для определения ординат диаграммы d 2 () воспользуемся выражениями: d на первой фазе Ф1 = 100°, Y1i// Y // 1 max cos 1i Ф1 ; на третьей фазе Ф3 = 120, Y3//i Y // 3 max cos 3 i Ф3 . 61 Рис. 17. Кинематические диаграммы движения роликового коромысла 62 Для получения диаграммы d () проведем графическое интегрирование аналога d 2 ускорения d 2 () (рис. 17, б). Для получения диаграммы () проведем графическое d интегрирование аналога скорости d () (рис. 17, в). d 2 Порядок графического интегрирования диаграмм d 2 () и d () аналогичен d d 2 описанному ранее для диаграмм d S2 () и dS () (рис. 16). d d Определяем масштабы полученных диаграмм: - масштаб угла поворота коромысла K max / Ymax где max β 0max 6 8.2 10 -3 1 мм , 64 рад – максимальный угол размаха коромысла в радианах, 6 1800 Ymax 64 мм – максимальное значение ординаты с диаграммы () ; - масштаб аналога угловой скорости коромысла K d K /( H 2 K ) 9.4 10 3 мм 1 ; d - масштаб аналога углового ускорения коромысла K d 2 d2 K d /( H 1 K ) 1.08 10 2 мм 1 ; d - масштаб времени K t K / к 1.74 10 3 с/мм ; - масштаб угловой скорости коромысла K K d к 0.94 10 1 1 мм с ; d - масштаб углового ускорения коромысла K K d 2β d 2 (к ) 2 1.08 1 мм с 2 . 63 2.1.3. Кулачковый механизм с плоским толкателем. Линейный закон изменения ускорения толкателя Исходные данные: - ход толкателя Smax = 25 мм = 0.025 м; - наибольший допустимый угол давления max = 20°; - величина эксцентриситета e = 13 мм; - фаза удаления толкателя Ф1 = 100°; - фаза верхнего выстоя Ф2 = 10°; - фаза приближения толкателя Ф3 = 80°; - фаза нижнего выстоя Ф4 = 170°; - закон изменения ускорения линейный; - угловая скорость кулачка = 10 с-1. 2 Строим диаграмму аналога ускорений d S2 () для заданного (линейного) закона d изменения ускорения толкателя (рис. 18, а). Масштаб угла поворота кулачка принимаем тот же, что и для рассмотренных ранее случаев: K 0.0174 рад / мм . Максимальное значение ускорения Y3// max , соответствующее меньшей фазе (Ф3 < Ф1), принимаем равным Y3// max 80 мм , а Y1// max находим из соотношения: // (Ф1 ) 2 Y3 max , (Ф 3 ) 2 Y // 1 max // откуда Y1 max (Ф 3 ) 2 Y // 3 max 2 (Ф1 ) 80 2 80 51 мм . 100 2 2 Для определения ординат диаграммы d S2 () воспользуемся выражениями: d на первой фазе Ф1 = 100°, Y1i// Y // 1 max 1 21i 1 ; на третьей фазе Ф3 = 80, Y3//i Y // 3 max 3 23i 3 . 64 Рис. 18. Кинематические диаграммы движения плоского толкателя 65 Для получения диаграммы dS () проведем графическое интегрирование аналога d 2 ускорения d S2 () (рис. 18, б). Для получения диаграммы S () проведем графическое d интегрирование аналога скорости dS () (рис. 18, в). d 2 Порядок графического интегрирования диаграмм d S2 () и dS () аналогичен d d описанному ранее для кинематических диаграмм, характеризующих работу кулачкового механизма с роликовым толкателем (рис. 16). Определяем масштабы полученных диаграмм: - масштаб перемещений толкателя K S S max / Ymax 0.025 м/46 мм 0.54 10-3 м/мм , где Ymax – максимальное значение ординаты с графика S(φ); - масштаб аналога скорости толкателя K dS KS /( H 2 K ) 0.54 10 3 /( 40 1.74 10 2 ) 0.78 10 3 м/мм ; d - масштаб аналога ускорения толкателя K d S K ds /( H1 K ) 0.78 103 /( 50 1.74 10 2 ) 0.89 103 м/мм ; 2 d 2 d - масштаб времени K t K / к 1.74 10 2 / 10 1.74 10 3 с / мм ; - масштаб скорости толкателя K v K dS к 0.78 103 10 0.78 102 м/с мм d - масштаб ускорения толкателя Kа K d 2S d 2 (к ) 2 0.89 10 3 10 2 0.89 10 1 м/с 2 мм . 66 2.2. Определение минимального радиуса кулачка. Построение диаграммы изменения углов давления при работе кулачкового механизма Компактность кулачкового механизма зависит от величины минимального радиуса профиля кулачка. Для кулачковых механизмов с роликовым толкателем или с роликовым коромыслом минимальный радиус кулачка определяется с учетом допускаемой величины угла давления. Углом давления называется острый угол ν между направлением линейной скорости выходного звена (толкателя или конца коромысла) и касательной, проведенной к кулачку в точке его касания с выходным звеном. При работе кулачковых механизмов с коромыслом, а также с роликовым или остроконечным толкателем величина угла давления непрерывно меняется. Это объясняется переменной кривизной профиля кулачка. В задании на проектирование задается допускаемый угол давления: ν ≤ 300 – для кулачковых механизмов с толкателем (роликовым или остроконечным); ν ≤ 450 – для кулачковых механизмов с коромыслом. В кулачковых механизмах с плоским толкателем тарелка последнего всегда является касательной к кулачку, и поэтому ν = const . Для указанного типа кулачковых механизмов минимальный радиус кулачка определяется из условия выпуклости профиля последнего. В обоих из указанных случаев используются построенные ранее кинематические диаграммы (рис. 16–18). Рассмотрим конкретные примеры. 2.2.1. Кулачковый механизм с роликовым толкателем Исходные данные: - ход толкателя Smax =40 мм = 0,04 м; - наибольший допускаемый угол давления max = 20°; - закон изменения ускорений толкателя − синусоидальный; - величина эксцентриситета е = 0,02 м; - фаза удаления толкателя Ф1 = 120°; - фаза верхнего выстоя Ф2 = 20°; - фаза приближения толкателя Ф3 = 80°; - фаза нижнего выстоя Ф4 = 140°; - угловая скорость кулачка = 10 c-1. Примем направление вращения кулачка по часовой стрелке. Для определения минимального радиуса кулачка необходимо совместно, в одном масштабе, построить диаграммы S() и dS , исключив при этом параметр (рис. 16, рис. 19). d 67 Для этого: - по вертикальной оси S откладываем перемещения Yi с диаграммы S() в масштабе KS (рис. 16, в), - по горизонтальной оси dS откладываем отрезок Xi, мм d X i (Yi / K dS ) / K S , d / dS где Yi – значение аналога скорости i-й точки на диаграмме (рис. 16, б). d Рис. 19. Диаграмма определения минимального радиуса кулачка с роликовым толкателем Последовательно откладывая i точек, получаем диаграмму в виде замкнутой кривой. Вправо откладывается фаза удаления толкателя, влево – фаза приближения толкателя. На данной диаграмме под углом к оси S проводим две касательные линии к построенной кривой. Пересекаясь, эти две линии ограничивают область (заштрихована), где может располагаться центр вращения кулачка и при этом будет выполняться условие max. Далее проводим линию, параллельную оси S и отстоящую от нее на величину e/KS вправо. На полученной линии в заштрихованной области должен располагаться центр вращения кулачка1. Эксцентриситет e служит для уменьшения величины углов давления νi на фазе подъема толкателя, то есть, когда толкатель совершает рабочий ход. 1 68 Для рассматриваемого примера минимальный радиуса кулачка будет равен величине O1C0 c учетом масштаба. Точка C0 – начало координат совместной диаграммы. Точка О1 – точка пересечения линии эксцентриситета и границы заштрихованной области. C учетом масштаба Кs минимальный радиус кулачка находится из выражения: r0min O1C0 K s 155 0.74 10 3 0.115 м . Построение диаграммы изменения углов давления при работе кулачкового механизма dS Воспользуемся диаграммой S (рис. 19). Из каждой i-й точки диаграммы d проводим линию, соединяющую ее с центром кулачка О1. Измеряем угол, образуемый этой линией с осью S, который и является углом давления νi в i-м положении кулачка. По полученным данным, в масштабе Кv = 0.5 град/мм, строим диаграмму изменения углов давления ν(φ) (рис. 20)2. Рис. 20. Диаграмма изменения угла давления при работе кулачкового механизма с роликовым толкателем 2.2.2. Кулачковый механизм с роликовым коромыслом Исходные данные: - угол размаха коромысла β 0max 30 0 ; - наибольший допустимый угол давления max = 20°; - длина коромысла l = 0,1 м; - закон изменения ускорения − косинусоидальный; - фаза удаления коромысла Ф1 = 100°; - фаза верхнего выстоя Ф2 = 30; - фаза приближения коромысла Ф3 = 120; - фаза нижнего выстоя Ф4 = 110; - угловая скорость кулачка = 20 с-1. При выполнении курсовой работы диаграмма ν(φ) строится ниже диаграммы перемещения выходного звена (S(φ) или β(φ)). Масштаб по оси абсцисс (ось φ) на диаграмме ν(φ) принимается тот же, что и для построенных ранее кинематических диаграмм. 2 69 Примем направление вращения кулачка по часовой стрелке. Для определения минимального радиуса кулачка необходимо совместно, в одном масштабе, построить диаграммы () и dβ , исключив при этом параметр (рис. 17, рис. 21). d Рис. 21. Диаграмма определения минимального радиуса кулачка с роликовым коромыслом Принимаем масштаб построения, м/мм: K l lO C O2C 0.100 м 100 мм 0.001 м мм , / 2 где lO C / − длина коромысла, м; 2 О2С − длина отрезка, изображающего коромысло на чертеже, мм. От радиуса-вектора О2С0 откладываем на чертеже сектор с углом max. Дуга С0В представляет собой траекторию движения оси вращения ролика коромысла. Определяем i-е положение оси вращения ролика по углу i = К·Yi , где i − угол, отложенный от радиуса-вектора О2С0; Yi − ордината диаграммы () , соответствующая i-й точке, мм (рис. 17, в); К – масштаб диаграммы (). Через i-тое положение оси вращения ролика проводим радиальную прямую и откладываем отрезок zi : , где Y'i – ордината i-й точки диаграммы d (рис. 17, б). d При вращении кулачка по часовой стрелке положительные значения zi (на фазе удаления) откладываются в направлении О2. Соединяя последовательно построенные точки, получаем диаграмму d/d в виде замкнутой кривой. Используя то, что угол передачи min=90-max, проводим 70 семейство линий под углом min для крайних точек 4; 5; 6; 18; 19 и 20, которые образуют область (заштрихована) возможного расположения центра вращения кулачка при выполнении условия < max. Проводим прямую под углом 0 (задан в исходных данных) к прямой О2С0. На полученной прямой должен располагаться центр вращения кулачка. Выбираем точку O1 таким образом, чтобы она принадлежала проведенной прямой и лежала в заштрихованной области, тогда минимальный радиус определится из выражения: rmin = O1C0 *Kl = 80 · 0.001 = 0.08 м . Построение диаграммы изменения углов давления при работе кулачкового механизма Воспользуемся диаграммой d (рис. 21). Из каждой i-й точки диаграммы d проводим линию, соединяющую ее с центром кулачка О1. Измеряем угол, образуемый этой линией с вертикалью. Указанный угол является искомым углом давления νi в i-м положении кулачка. По полученным данным, в масштабе Кv = 0.5 град/мм, строим диаграмму изменения углов давления ν(φ) (рис. 22). Рис. 22. Диаграмма изменения угла давления при работе кулачкового механизма с роликовым коромыслом 2.2.3. Кулачковый механизм с плоским толкателем Исходные данные: - ход толкателя Smax = 25 мм = 0.025 м; - наибольший допустимый угол давления max = 20°; - величина эксцентриситета e =13 мм; - фаза удаления толкателя Ф1 = 100°; - фаза верхнего выстоя Ф2 = 10°; - фаза приближения толкателя Ф3 = 80°; - фаза нижнего выстоя Ф4 =170°; - закон изменения ускорения линейный; - угловая скорость кулачка = 10 с-1. 71 Примем направление вращения кулачка по часовой стрелке. Минимальный радиус кулачка с плоским толкателем определяется путем совместного (в одном масштабе) построения диаграмм S() и d 2S , исключив при этом параметр (рис. 18, рис. 23). d 2 Для определения координат каждой точки по осям d 2S и S() необходимо: d 2 1) на оси S (ось ординат) отложить отрезок, равный Yi, соответствующий ординате i-й (рассматриваемой) точки на графике S () (рис. 18, в); 2) по оси d2S / d 2 (ось абсцисс) отложить отрезок, равный Yi // K Zi Ks d 2S d 2 , где Yi " ордината i-й точки графика аналога ускорения d2S/d2 (рис. 18, а); - соединяя последовательно полученные точки, строим диаграмму S d2S/d2 . Рис. 23. Диаграмма определения минимального радиуса кулачка с плоским толкателем Под углом 45° к оси S проводим линию таким образом, чтобы она касалась диаграммы. На пересечении прямой с осью S получим точку К. Увеличивая С0К на величину 1012 мм, получим точку О1, соответствующую центру вращения кулачка. Величина С0О1 равна минимальному радиусу кулачка в масштабе КS. C учетом масштаба Кs минимальный радиус кулачка находится из выражения: r0min = КS С0О1 = 0.54·10-3 м/мм · 100 мм = 0.054 м. 72 Построение диаграммы изменения углов давления при работе кулачкового механизма Для построения диаграммы ν(φ) проводим ось абсцисс φ и размечаем аналогично кинематическим диаграммам d S d 2S , и S(), приведенным на рис. 18, то есть в 2 d d масштабе K 1.74 10 2 рад мм . Далее, перпендикулярно оси φ, проводим ось ординат ν. Поскольку в рассматриваемом кулачковом механизме угол давления имеет постоянное значение max = 20°, то для построения диаграммы ν(φ) (в масштабе Kν) достаточно на расстояние max/Kν провести отрезок, параллельный оси φ. Отрезок строится выше оси φ в пределах фазовых углов Ф1, Ф2, Ф3 . Диаграмма ν(φ) в масштабе Кv = 20 град/мм приведена на рис. 24. Рис. 24 Диаграмма изменения угла давления при работе кулачкового механизма с плоским толкателем 2.3. Построение профиля кулачка по методу обращения движения Профилирование кулачка – завершающий этап синтеза кулачкового механизма. Независимо от типа кулачкового механизма, профилирование кулачка всегда проводится методом обращенного движения. Идея этого метода состоит в следующем: кулачковому механизму сообщается дополнительное (обращенное) движение с угловой скоростью, равной по величине и противоположной по направлению угловой скорости кулачка ω к . В результате, кулачок становится как бы неподвижным, а выходное звено (толкатель или коромысло) начинает вращаться с угловой скоростью –ωк в сторону, противоположную вращению кулачка. Различают теоретический и практический (рабочий) профиль кулачка. Практический профиль кулачка – очертание рабочей поверхности кулачка, входящей в непосредственное соприкосновение (контакт) с выходным звеном механизма. В зависимости от типа кулачкового механизма, контакт выходного звена с кулачком может осуществляться как непосредственно (остроконечный или плоский толкатель), так и через промежуточное звено – ролик (роликовое коромысло, роликовый толкатель). 73 Для кулачковых механизмов с роликовым толкателем или с роликовым коромыслом вначале строится теоретический профиль кулачка, по которому определяется радиус ролика, а затем строится практический (рабочий) профиль кулачка. Теоретический профиль кулачка – замкнутая кривая, параллельная рабочему профилю кулачка и расположенная с его внешней стороны на расстоянии, равном радиусу ролика толкателя или коромысла. 2.3.1. Кулачковый механизм с роликовым толкателем Исходные данные те же, что и в пп. 2.2.1, r0 min 0.115 м . Из произвольно выбранной на чертеже точки О проводим окружность произвольным радиусом (рис. 25). Рис. 25. Построение профиля кулачка с роликовым толкателем Определяем масштаб профиля кулачка, м/мм: Kl r0 lr min 0.115 м 1 103 м / мм , 115 мм min где r0 min − минимальный радиус кулачка, м; l rmin − длина отрезка, изображающего его на чертеже, мм. 74 Из центра вращения кулачка (точки О) строим окружность радиусом e / K l 0.02 м 0.001 м/мм 20 мм . Слева, по касательной к полученной окружности, проводим вертикальную прямую перемещения толкателя3. Пересечение проведенной прямой с окружностью радиуса rmin определяет положение центра С0 ролика толкателя в положении, соответствующем началу фазы удаления, а радиус-вектор ОС0 совпадает с началом фазы Ф1. С учетом масштаба Кl определяем перемещение Si толкателя для каждой i-ой точки (см. рис. 16, в), мм: Si K S Yi . Kl Для построения теоретического профиля кулачка перемещаем толкатель в сторону, обратную вращению кулачка, с учетом перемещения Si и угла поворота кулачка i . Для этого: - делим окружность радиусом e на равные сегменты (по 10), начиная с горизонтального правого луча OO0; - к каждому лучу OOi (i-я точка деления окружности радиусом e / K l ) строим перпендикулярную прямую. В результате, получаем серию линий, касательных к окружности радиусом e / K l . При этом каждая последующая касательная отстоит от предыдущей касательной на угол 10; - на каждой полученной касательной от окружности минимального радиуса кулачка откладываем отрезок величиной Si и находим положение точки Сi; - соединяя полученные точки С1 − С22 , получим теоретический профиль кулачка. Величина радиуса rp ролика толкателя определяется из известного условия rр ρ min , где min − минимальный радиус кривизны профиля кулачка. Для графического определения min на участке кривой профиля наименьшего радиуса кривизны проводим три взаимно пересекающиеся окружности с центрами на кривой теоретического профиля, а через их общие точки проводим две линии, которые пересекаются в точке, соответствующей центру кривизны данного участка min. Минимальный радиус ролика должен удовлетворять следующим условиям: rр < 0,7*min , rр < 0,4*rmin. Касательная к окружности радиусом е, для принятого направления вращения кулачка, проводится параллельно траектории движения толкателя с той стороны, где линейная скорость точки касания совпадает по направлению с вектором скорости толкателя на фазе удаления. Это позволяет уменьшить углы давления на указанной фазе. 3 75 Принимаем для нашего случая rр 30 мм . Из соответствующих точек Сi теоретического профиля строим окружности радиусом rp . Проводим огибающую кривую и получаем практический профиль кулачка, который может быть использован как шаблон для его изготовления. 2.3.2. Кулачковый механизм с роликовым коромыслом Исходные данные те же, что и в пп. 2.2.2, r0 min 0.08 м . Определяем масштаб построения профиля кулачка (рис. 26), м/мм: Kl = lкор /О2С0 = 0.1 м/100 мм = 0.001 м/мм где lкор − длина коромысла, м; О2С0 − длина отрезка, изображающего коромысло на чертеже, мм. Определяем длину отрезка О1С0, мм: О1С0 = rmin / Кl = 0.08 /0.001 = 80 мм. Определяем длину отрезка O1O2, мм: O1O2 = lO1O2 / Kl = 0.145 /0.001 = 145 мм. Строим треугольник О1O2С0. Через точку С0 проводим дугу С0В с углом, равным углу размаха коромысла max = 300. Полученная дуга является траекторией движения центра ролика (рис. 26). Пользуясь методом обращенного движения, проводим окружность радиусом O1O2 с центром в точке O1, на которой отметим положения центра вращения коромысла во всех точках при обращенном движении (т. е. прямая O1O2i+1 отстоит от O1O2i на 10). Для определения положения центра ролика Сi, в i-м положении коромысла, необходимо: - отложить угол i от начального положения коромысла O2C0 , отметив при этом точку i на дуге С0В; - из центра вращения коромысла, соответствующего i-му его положению в обращенном движении, провести дугу радиусом O2С0 , равную примерно по длине дуге С0В; - раствором циркуля, равным О1i, перенести току i до пересечения с дугой, построенной для i-го положения коромысла. Значения углов i берутся с диаграммы (φ) (см. рис. 17, в). 76 Kl = 0.001м/мм Рис. 26. Построение профиля кулачка с роликовым коромыслом Проведем аналогичные построения во всех положениях и, соединяя полученные точки, строим теоретический профиль кулачка. Порядок определения минимального радиуса ролика и построения практического профиля кулачка аналогичен описанному для кулачкового механизма с роликовым толкателем. 2.3.3. Кулачковый механизм с плоским толкателем Исходные данные те же, что и в пп. 2.2.3, r0 min 0.054 м . Определяем масштаб построения, м/мм: Kl = r0min / l rmin = 0.054 / 80 = 0.68·10-3 м/мм, где r0min действительная величина минимального радиуса кулачка, м; lrmin величина отрезка, изображающего r0min на чертеже, мм. Проводим окружность радиусом l rmin с центром в точке О1 (рис. 27). Через центр О1 проводим окружность радиусом lе , равным величине эксцентриситета е в масштабе Kl : lе = е / Kl = 0.013м/0.6810-3 = 20 мм. 77 Проводим касательную к окружности минимального радиуса l rmin . Полученная касательная совпадает с тарелкой плоского толкателя в его начальном положении. C0i Рис. 27. Построение профиля кулачка с плоским толкателем Под углом передачи = 90° – = 90° – 20° = 70° к плоскости тарелки толкателя проводим касательную к окружности радиусом lе. Касательную проводим слева от центра вращения кулачка. Полученная прямая определяет положение направляющей толкателя. Положение тарелки толкателя соответствует моменту начала фазы его удаления. Полученная от пересечения этих линий точка С0 и будет определять положение тарелки толкателя, а радиус-вектор О1С0 есть начало фазы Ф1. В направлении, противоположном вращению кулачка, от отрезка О1С0 откладываем последовательно углы Ф1, Ф2 , Ф3 . Строим дугу радиусом О1С0, стягивающую суммарный угол Ф1+Ф2+Ф3 . Полученную дугу делим на равные сегменты по 10. 78 Через полученные точки проводим касательные к окружности радиусом lе., которые совпадают с осью толкателя в соответствующем положении. Примечание. Если lrmin O1C0 , то дуга, стягивающая угол (Ф1 + Ф2 + Ф3) , сливается с окружностью радиусом l rmin . В этом случае, точку С0 следует считать лежащей на окружности радиусом l rmin . На этой же окружности последовательно откладываются и углы Ф1, Ф2, Ф3, которые затем делятся на равные сегменты по 10 (рис. 27). Для определения положения точки С в i-м положении толкателя необходимо определить перемещение толкателя Si = Yi K S , Kl где Yi ордината соответствующей точки графика S () (см. рис. 18, в). Откладываем от точки С0i , в i-м положении толкателя, величину Si и через полученную точку проводим под углом = 70° линию, определяющую положение плоскости тарелки толкателя (см. рис. 27). Проведя построения для всех положений тарелки толкателя, получим семейство прямых линий. Замкнутая кривая, касательная к этим прямым, является профилем кулачка с плоским толкателем. БИБЛИОГРАФИЧЕСКИЙ СПИСОК 1. Алексеев А.В. Теория механизмов и машин: учеб. пособие для вузов ж.-д. трансп. / А.В. Алексеев [и др.]. – Самара : СамГАПС, 2006. – 242 с. 2. Смелягин А.И. Теория механизмов и машин. Курсовое проектирование : учебное пособие. – М.: ИНФРА-М, 2007. – 263 с. 3. Наумкин Н.И. Теория механизмов и машин : учебник / Н.И. Наумкин, Н.В. Раков, В.Ф. Купряшкин. – 2-е изд., испр. и доп. – Саранск : Изд-во Мордов. ун-та, 2008. – 188 с. 4. Артоболевский И.И. Теория механизмов и машин. – М.: Наука, 1988. – 638 с. 5. Теория механизмов и машин : учебник для втузов / К.В. Фролов [и др.] ; под редакцией К.В. Фролова. – М.: МГТУ им. Баумана, 2002. – 496 с. 6. Проектирование кривошипно-ползунного механизма : методические указания для курсового проектирования по теории механизмов и машин / Е.В. Глобенко, М.С. Жарков, В.В. Янковский. – Самара : СамГАПС, 2004. – 28 с. 7. Проектирование кривошипно-коромыслового механизма : методические указания для курсового проектирования по теории механизмов и машин. – 2-е изд., перераб. и доп. / Е.В. Глобенко, М.С. Жарков, В.В. Янковский, А.В. Алексеев. – Самара : СамГАПС. 2004 – 28 с. 8. Проектирование плоских кулачковых механизмов : методические указания для курсового проектирования / М.С. Жарков, В.В. Федоров, В.В. Янковский. Самара : СамИИТ, 1997. – 43 с. 79