УДК - Теория механизмов и машин
реклама

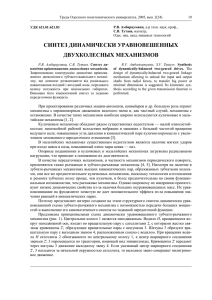
Анализ одноконтурных механизмов на основании общей модели УДК 621.01 Т. БИЛЬ АНАЛИЗ ОДНОКОНТУРНЫХ МЕХАНИЗМОВ НА ОСНОВАНИИ ОБЩЕЙ МОДЕЛИ Введение Проектирование механизмов – это многоэтапный процесс, в котором важную роль, решающую для последующих этапов, играет выбор структуры и геометрии звеньев, называемый структурным синтезом. Параметрический синтез заключается в выборе лучших, по каким-то признакам, параметров выбранной на предыдущем этапе структуры. Оба эти этапа могут многократно повторяться вплоть до получения нового, лучшего решения или прекращения процесса поиска. Существующие методы структурного синтеза позволяют получить многочисленный набор структур, выполняющих поставленные задачи только для заданных видов движений [1]. В конце этого этапа возникает вопрос, какую из полученных структур использовать в параметрическом синтезе. Эта задача бывает настолько трудна, что часто приходится переходить к более простым, известным решениям (например, к плоским механизмам), для которых существуют хорошо разработанные методы анализа и синтеза. Однако плоские механизмы существуют только в теории. Неточности выполнения приводят к необходимости анализировать и проектировать механизмы в полном виде пространственном. Модель механизма, представленная в настоящей работе, – это пространственный трехзвенный механизм с одной высшей и двумя низшими парами [2]. Низшие пары, соединяющие подвижные звенья механизма со стойкой, могут быть выбраны произвольно из трех возможных: R вращательной, P поступательной и H винтовой. Поверхность для контакта в высшей паре выбрана такой, чтобы эта поверхность и ее частные случаи описывали по возможности большинство известных рычажных механизмов. Высшая кинематическая пара (ВКП) может быть заменена несколькими низшими кинематическими парами (НКП). В качестве ВКП выбраны два тора, находящиеся в точечном контакте. Как показано в работе [3], такой механизм является обобщением почти всех известных рычажных одноконтурных механизмов с одной степенью подвижности. Это обобщение учитывает возможность перехода от поверхности тора к цилиндру или плоскости в случае, когда радиус тора или радиус трубы тора становятся намного больше других размеров. Тогда в структуре эквивалентных рычажных механизмов появляются пары: C цилиндрическая, P поступательная и/или их комбинации. В самом общем случае трехзвенный механизм с ВКП в виде двух торов эквивалентен структуре рычажного механизма 7R. В процессе моделирования механизма принято, что поверхности имеют правильные формы, являются недеформируемыми, а их размеры выполнены точно. Для записи взаимного расположения элементов использованы матрицы четвертого порядка и матричное преобразование. Для решения задачи анализа использован метод условного размыкания векторного контура в точке контакта элементов высшей кинематической пары [4, 5]. Задача анализа не имеет алгебраического решения. В случае контакта двух торов можно ее свести до уравнения восьмой степени относительно одного из углов, определяющих расположение точки контакта на поверхности тора. В приводимых примерах для решения этой задачи использован метод оптимизации. Пример анализа механизма В качестве примера анализа приводится механизм с высшей парой в виде двух торов, находящихся в точечном контакте (рис. 1, а). Расположение точки на поверхности тора Теория Механизмов и Машин. 2008. №1. Том 6. 55 Геометрия механизмов показано на рис. 1, b. Координаты точки на поверхности тора в подвижной системе координат, используя указанные на рис. 1 обозначения, можно представить в следующем виде: a) b) Y Xi1 Pi1 γi X11 β1 O Z 1 a Y1 1 1 2 Z1 1 O1 a2 Qi1 ri Ri1 si Si Ni δi φi X b1 1 ci X21 qi β2 b2 Y21 Yi1 Oi1 O2 Zi1 Z21 1 Рис. 1. Механизм с высшей кинематической парой в виде двух торов (a) и параметры, определяющие расположение тора и точки на его поверхности (b) (ri si sin i ) cos i ci (ri si sin i ) sin i cos i ( si cos i qi ) sin i Si1 , (ri si sin i ) sin i sin i ( si cos i qi ) cos i 1 (1) где (i = 1,2 номер звена). На основании формулы (1) можно получить все необходимые уравнения для других точек модели, приравнивая к нулю соответствующие линейные размеры и угловые координаты. Для получения координат, например, точки Qi1 , необходимо в уравнении (1) принять si 0 , ri 0 , i 0 и i 0 . Координаты нормали к поверхности тора в подвижной системе координат (см. рис. 1) можно получить в виде единичного вектора (орта): sin i cos i sin i sin i cos i cos i sin i N i1 , sin i sin i sin i cos i cos i 0 (2) а другие орты - аналогично уравнению (2). Например, для получения координат орта направления оси тора (направление PQ ), необходимо в уравнении (2) принять i 0 и i 0 . 56 http://tmm.spbstu.ru Анализ одноконтурных механизмов на основании общей модели Для получения соответствующих координат векторов точек и ортов направлений в неподвижной системе координат необходимо использовать уравнение: Ai0 M i01 Ai1 , (3) где: Ai1 эквивалентный вектор координат точки или орт направления в подвижной системе, cos i cos i sin i M i 01 sin i sin i 0 sin i cos i cos i sin i cos i 0 sin i cos i 0 0 ai bi sin i bi cos i 1 (4) матрица преобразования координат подвижной системы (индекс 1) в неподвижную (индекс 0). Уравнение замкнутости получим в виде : S10 S 20 , N10 N 20 . (5) Уравнение (5) представляет собой систему из пяти нелинейных уравнений, из которых первые три определяют равенство координат точек контакта, а два следующие совпадение направлений, перпендикулярных к поверхностям. Знак « + » необходимо рассматривать при контакте разноименных поверхностей (внешней с внутренней), а знак « » при контакте внешних поверхностей. Неизвестными в этой системе являются четыре угла i и i . Пятой неизвестной может быть любой параметр, определяющий положение первого или второго звена, который будет принят в качестве выходного. Для этой цели в примере используется угол 2 , определяющий угол поворота второго звена. Анализ механизма выполнен для следующих параметров: a1 0,00 , 1 0,00 , b1 4,09 , c1 2,20 , q1 1,59 , r1 1,7 , s1 3,43 , 1 44,17 , a2 10,00 , 2 30,00 b2 1,75 , c2 10,43 , q2 3,24 , r2 3,95 , s2 3,27 , 2 127,11 . Механизм был предварительно оптимизирован с целью получения почти линейной характеристики 2 k *1 с коэффициентом k 0,1 в диапазоне изменения угла 1 0 180 . При этом угол поворота ведущего звена в одну сторону составлял 236°. Механизм с высшей парой и перечисленными параметрами изображен на рис. 2, а, эквивалентный ему рычажный механизм 7 R на рис. 2, b, а полученные характеристики на рис. 2, c. На рис. 2, c изображена функция положения ведомого звена механизма с начальными положениями ведущего звена 10 10 и ведомого звена 20 150 для более удобного графического изображения характеристики 2 k *1 . Перед выполнением анализа полученные оптимальные параметры были округлены до двух значащих цифр после запятой. Скорость вращения ведомого звена вычислено методом численного дифференцирования, исходя из того, что скорость ведущего звена равна единице. Расчеты выполнены для полного поворота ведущего звена с шагом 1°. Угол давления [6] в виде угла между направлением нормали к поверхностям в точке касания и вектором скорости ведомого звена, определен для Теория Механизмов и Машин. 2008. №1. Том 6. 57 Геометрия механизмов механизма, показанного на рис. 2, а. Максимальное отклонение передаточного отношения в пределе 1 0 180 составляло k 0,00755 , а угол давления не превышал 53,93º. a) b) β1 β2 Угол поворота ведущего звена β1 [º] Угол давления μ2 [º] Угловая скорость ведомого звена [1/s] Угол поворота ведомого звена β2 [º] c) Рис. 2. Схема механизма с высшей парой в виде тортор (a), эквивалентный рычажный механизм 7R (b) и графики функции положения, скорости и угла давления в зависимости от угла поворота ведущего звена (c) 58 http://tmm.spbstu.ru Анализ одноконтурных механизмов на основании общей модели Анализ сборок Проблема сборок пространственных механизмов широко рассмотрена в работе Э.Е. Пейсаха [7]. Здесь рассмотрим только некоторые проблемы сборок трехзвенного механизма, в виду того, что они имеют простую графическую интерпретацию. Трехзвенный механизм с высшей кинематической парой в виде двух торов, находящихся в точечном контакте, может иметь до восьми сборок. Это следует из степени полинома, описывающего экстремальное расстояние между окружностями в пространстве. Расстояние между окружностями в пространстве можно привести к многочлену восьмой степени относительно одного из параметров (углов), определяющих расположение точки экстремального расстояния на окружности [8]. Условия контакта двух торов (5), главные окружности которых рассматриваются, выполняют все вещественные корни этого уравнения. На рис. 3, ah представлен механизм, имеющий все восемь сборок в данном положении входного звена. Рядом со схемой сборки трехзвенного механизма приводится эквивалентная схема сборки семизвенного рычажного механизма 7R. Со стойкой связана неподвижная система координат. На самом деле этот механизм соответствует структуре шестизвенного механизма RRURRR или RRRURR, т.к. вращательная пара, соответствующая точке контакта торов, перпендикулярна и пересекает оси двух соседних вращательных пар. Сборку механизма можно рассматривать как конфигурацию звеньев, при которой входное и выходное звено имеют возможность выполнения движения в окрестности рассматриваемой точки и, по крайней мере, в одну сторону от этой точки. Если движение возможно только в одну сторону, то рассматриваемая точка является крайней. Крайней может быть точка по отношению к входному или выходному параметру. Если механизм в данном положении можно собрать, но движение выполнить невозможно, это означает мертвое положение механизма. Для определения мертвых и крайних положений можно использовать величину угла давления. Здесь надо рассматривать два угла: μ1 между направлением нормали к поверхностям в точке контакта и скорости точки входного звена; μ2 между направлением нормали к поверхностям в точке контакта и скорости точки для выходного звена. В мертвом положении оба углы давления равны 90º. В крайнем положении один из углов равен 90º. Если μ1 = 90º в каком либо положении, значит, входное звено находится в крайнем положении. Проблемой при выполнении вычислений, например, функции положения, является шаг расчета. Слишком большой шаг приводит к возможности «не заметить» крайних положений механизма и перейти в область существования другой сборки. Ограничение угла давления при синтезе механизма позволяет обойти проблему крайних положений, если они недопустимы. Это, однако, не решает проблему большого количества сборок. Эта проблема смягчается в процессе синтеза механизмов в виду того, что для рассматриваемого механизма существует параметрический переход между разными сборками. Сборка является одним из локальных решений. Изменяя во время синтеза параметры механизма, можно получить любую сборку механизма. Механизмы с низшими парами, эквивалентные трехзвенным механизмам с одной высшей парой в виде торов и двумя низшими парами получим, замещая высшую пару соответствующими низшими парами, сохраняя при этом пары, соединяющие подвижные звенья со стойкой. Пара в виде контактирующих торов соответствует кинематической цепи с пятью последовательными звеньями, соединенными вращательными парами с перпендикулярными соседними парами. Пары, соединяющие подвижные звенья со стойкой, в настоящей работе на всех рисунках изображены в виде вращательных. Однако каждая из этих двух пар может быть поступательной, винтовой или цилиндрической. Все зависит от параметров, которые выберем в качестве переменных. Например (см. рис. 1), если переменным будет угол поворота β1 , пара будет вращательной; если линейное расстояние b1 , пара будет поступательной; если оба параметра будут взаимно зависимы винтовой; если оба будут переменными и независимыми, пара будет цилиндрической. В последнем случае, для сохранения одной степени подвижности придется заменить следующее Теория Механизмов и Машин. 2008. №1. Том 6. 59 Геометрия механизмов подвижное соединение звена со стойкой неподвижным, что приведет трехзвенный механизм к двухзвенному, а эквивалентный ему рычажный механизм будет иметь структуру CRRRRR. a) b) c) d) e) f) g) f) Рис. 3. Восемь сборок одного механизма Эквивалентная структура рычажного механизма зависит от размеров торов, составляющих высшую пару. Если радиус трубы первого тора s1 равен нулю, тогда в эквивалентной структуре оси двух соседних вращательных пар (соответствующие точкам R1 и S 1 на рис. 1) пересекаются, а точки совпадают, что соответствует универсальному шарниру (U). В результате получаем структуру RRURRR рычажного механизма. Количество сборок этого механизма не более восьми. Если радиусы труб обоих торов равны нулю, то оси трех соседних вращательных пар пересекутся в одной точке, а полученную пятизвенную 60 http://tmm.spbstu.ru Анализ одноконтурных механизмов на основании общей модели структуру обозначим RRSRR. Количество сборок механизма с такой структурой не более четырех. Это следует из того, что две окружности при относительном, поступательном или вращательном движении могут иметь максимум четыре общие точки. Если радиус главной окружности первого тора равен нулю, тогда тор становится шаром, что в эквивалентной схеме тоже соответствует универсальному шарниру (U), а получаемая структура соответствует рычажному механизму RURRRR с не более чем четырьмя сборками. Здесь четыре сборки соответствуют вещественным корням уравнения, описывающего экстремальные расстояния от точки до окружности в трехмерном пространстве. Если имеем механизм с двумя шарами, образующими высшую пару, тогда в эквивалентной структуре получаем пятизвенный механизм RURUR с двумя сборками. Эта структура кинематически соответствует механизму с высшей парой шарточка, что соответствует структуре пространственного четырёхзвенника RUSR, имеющего, как известно, две сборки. Кроме того, если радиус главной окружности тора велик, а радиус трубы тора мал, то тор можно приближенно заменить цилиндром. Такую замену можно выполнить в том случае, когда в механизме с высшей парой используется небольшой участок тора. В механизме с высшей парой в виде цилиндртор возможны максимум четыре сборки, т.к. экстремальное расстояние между прямой и окружностью можно привести к уравнению четвертой степени. Если радиус трубы тора велик, тогда тор можно приближенно заменить касательной плоскостью. В эквивалентном механизме плоскости соответствует кинематическое соединение с двумя поступательными парами. Особые положения механизма Кроме проблемы большого количества сборок, при анализе механизма с высшей кинематической парой в виде двух торов существует проблема особых положений механизма. В данном случае имеются в виду положения, в которых контакт между торами происходит в двух точках или по окружности. Это приводит к тому, что подвижность трехзвенной структуры становится нулевой или отрицательной. Рассмотрим в первую очередь контакт по окружности. Если рассматривать вместо торов их главные окружности, то контакт торов по окружности соответствует тому, что одинаковых расстояний между главными окружностями становится бесконечное множество. Существуют три случаи такого расположения двух окружностей в трехмерном пространстве. Y π1 h1 P 1 l P2 Q1 X η r1 h2 Z π2 r2 Q2 Рис. 4. Схема расположения окружностей в пространстве Воспользуемся схемой расположения окружностей в пространстве, представленной на рис. 3. Здесь окружности расположены произвольным образом на двух плоскостях 1 и 2 в пространстве. Оси окружностей расположены под углом и находятся на расстоянии Теория Механизмов и Машин. 2008. №1. Том 6. 61 Геометрия механизмов l P1 P2 . Центры окружностей находятся на расстоянии, соответственно, h1 P1Q1 и h2 P2 Q2 от точек пересечения их осей с линией кратчайшего расстояния этих осей. Все параметры можно определить, зная расположение центров окружностей Q1 и Q2 и направление ортов их осей (см. рис. 1). Условия существования бесконечного множества одинаковых расстояний между окружностями таковы: 1. Окружности имеют общую ось (коаксиальные), l 0 и 0 , ( h1 ,h2 ). 2. Оси окружностей перпендикулярны и центр одной окружности находится на другой, l r1 или l r2 ) и h1 h2 0 и 2 . 3. Окружности Вилларсо. Окружности имеют одинаковый радиус. Одна окружность является главной окружностью тора. Другая окружность является сечением этого тора, дважды касательной плоскостью, r1 r2 , h1 h2 0, s / l sin , где s диаметр трубы тора или кратчайшее расстояние между окружностями. Если рассматривать эквивалентную структуру рычажного механизма, то эти три условия оказываются широко известными в теории механизмов. Условие первое выполнение этого условия приводит к тому, что четыре звена находятся между двумя вращательными парами, имеющими общую ось вращения. Это означает, что часть звеньев механизма, находящаяся между этими осями, обретают дополнительную, локальную подвижность. Условие второе это условие, аналогичное предыдущему. Локальную подвижность приобретают три соседних звена. Третье, возможно, самое интересное, это условие существования механизма Бенетта внутри рассматриваемого механизма. В данной ситуации имеет место частный случай механизма Бенетта, механизм с взаимно перпендикулярными соседними парами. Возможных вариантов контакта торов одновременно в двух точках тоже три: 4. Параллельные оси соприкасающихся торов, 0 и расстояние между осями l , удовлетворяющее неравенству r1 r2 l r1 r2 . 5. Пересекающиеся оси торов l 0 и угол между осями , удовлетворяющий неравенству 1 2 1 2 , где 1 arctan( r1 h1 ) и 2 arctan( r2 h2 ) углы конусов с вершиной в точке пересечения осей, проходящие через рассматриваемые окружности. 6. Оси находятся под произвольным углом , а плоскости окружностей пересекаются вдоль линии, проходящей через оба центра окружностей, при этом h1 h2 0, а расстояние между осями удовлетворяет неравенству r1 r2 l r1 r2 (одна окружность пересекает плоскость другой окружности внутри нее только в одной точке). В эквивалентной структуре рычажного механизма в этих положениях происходит пересечение графиков функций положения двух сборок механизма. Это является признаком существования двух сборок механизма в одном и том же положении входного и выходного звеньев. Такие положения называют точками бифуркации [9]. Существуют еще особенности, вытекающие из общих правил существования рычажных механизмов, не относящиеся к механизму с высшей парой. Это условия существования плоской структуры внутри пространственной структуры (четыре взаимно параллельные оси, три поступательные пары находящиеся на параллельных плоскостях, три параллельные вращательные пары и одна поступательная в плоскости, перпендикулярной осям вращательных пар, и т.п.) или существование сферической структуры (четыре оси вращения, пересекающиеся в одной точке). Заключение Представленная модель трехзвенного механизма с высшей кинематической парой в виде двух соприкасающихся торов, может быть использована при анализе и синтезе любого одноконтурного одноподвижного пространственного рычажного механизма. Достоинством такого подхода является одноэтапный, только параметрический синтез. 62 http://tmm.spbstu.ru Анализ одноконтурных механизмов на основании общей модели Сложностью является большое количество сборок рассматриваемого механизма и отсутствие алгебраического, точного решения. Для решения задачи анализа возможно использование различных итерационных методов. В статье представлены результаты, полученные при использовании оптимизации в процессе анализа. Схемы механизмов получены на основе представленной модели в программе, составленной автором в системе DELPHI2005 с использованием библиотеки OpenGL. Эквивалентная схема рычажного механизма 7R, получаемая на основе представленной модели трехзвенного механизма, не является самой общей, т.к. некоторые параметры постоянны. Например, оси вращения пар, эквивалентные высшей паре тортор, расположены особым образом перпендикулярно. Для получения более общей модели можно использовать поверхность общего тора (образующая окружность, неперпендикулярная по отношению к основной окружности) и более сложные условия взаимного расположения поверхностей. СПИСОК ЛИТЕРАТУРЫ 1. Gronowicz A.: Podstawy analizy układów kinematycznych. Oficyna Wydawnicza Politechniki Wrocławskiej, Wrocław, 2003. 250 s. 2. Zhou Y.B., Buchal R.O., Fenton F.G., Tan F.R.: Kinematic analysis of certain spatial mechanisms containing higher pairs. // Mechanism and Mасhine Theory, vol. 30. No. 5, 1995, 705720. 3. Bil T.: Analiza geometryczna trójczłonowego mechanizmu z wyższą parą kinematyczną w postaci stykających się powierzchni dwóch torusów. W książce Teoria maszyn i mechanizmów. Pod red. J. Wojnarowskiego i M. Galickiego. Tom I. Zielona Góra 2006, 67-73. 4. Litvin F.L.: Simplification of the Matrix method of linkage analysis by division of a mechanism into unclosed kinematic chains. // Mechanism and Mасhine Theory, vol. 10, 1975, 315326. 5. Литвин Ф.Л. Билль Т.С., Тененбаум Ю.З.: Синтез трехзвенных механизмов с соприкасающимися цилиндрами. // Приборостроение. 1978. № 9. С. 8893. 6. Zhang W.: On the finding of the spatial linkage with constant pressure angle. // Mechanism and Mасhine Theory, vol. 32, 1997, 933940. 7. Пейсах Э.Е.: Структура и кинематика пространственных рычажных механизмов. СПб.: СПГУТД, 2004. – 212 с. 8. Zsombor-Murray P.I., Hayes M.J.D., Husty M.L.: Extreme Distance to a Spatial Circle. Special Issue of the Transactions of the CSME: Selected Papers of the 2nd CCToMM Symposium on Mechanisims, Machines, and Mechatronics, vol. 28, no. 2A, 2004, 235. 9. Guest S.D., Fowler P.W.: Symmetry conditions and finite mechanisms, 2006, www2.eng.cam.ac.uk/-sdg/preprint/self-stress.pdf. Поступила в редакцию 26.11.2007 После доработки 07.12.2007 Теория Механизмов и Машин. 2008. №1. Том 6. 63