ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ СТРОИТЕЛЬНЫЙ УНИВЕРСИТЕТ
В.И.Антонов, И.М.Закалюкина
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
краткий курс
КОНСПЕКТ ЛЕКЦИЙ ПО ТЕОРЕТИЧЕСКОЙ МЕХАНИКЕ
М о с к в а 2009
_________________________
2
ЛЕКЦИЯ 1
1.1.
Основные понятия механики
Теоретическая механика представляет собой науку об общих законах механического
движения и механического взаимодействия материальных тел.
В теоретической механике изучается одна из форм движения материи – механическое
движение, состоящее в том, что тело с течением времени изменяет свое положение в
пространстве по отношению к другим телам. Механическим называют тот вид
взаимодействия тел, в результате которого происходит изменение их движения или
изменение их формы (деформация).
При исследовании движения какого-либо тела необходимо указать другое тело (тело
отсчёта), по отношению к которому рассматривается движение. С телом отсчёта жёстко
связывают систему координат. Тело отсчёта, связанная с ним система координат и счётчик
времени (часы) образуют систему отсчёта.
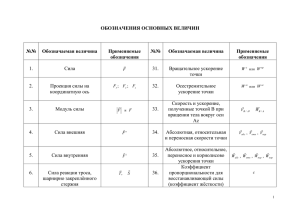
Фундаментальным
понятием
механики
является сила, которая представляет собой
количественную
меру
механического
взаимодействия
материальных
тел.
Сила –
величина векторная. Ее действие на тело
определяется численным значением или модулем
силы,
направлением
действия
и
точкой
приложения (Рис.1.1). Прямая, вдоль которой
направлена сила, называется линией действия
силы. Единицей измерения силы в системе СИ
является ньютон (Н).
Кроме внешних воздействий, т.е. сил, характер движения любого тела определяется его
инертностью, которая является одним из основных свойств движущейся материи. Это
свойство проявляется в способности тела сохранять свое движение при отсутствии сил и
изменять его под действием сил не мгновенно, а постепенно, тем медленнее, чем больше
вещества содержится в теле. Одной из важнейших количественных характеристик
инертности (инерции) тела является масса.
1.2.
Модели материальных тел
Теоретическая механика является естественной наукой, опирающейся на результаты
опыта и наблюдений и использующей математический аппарат при анализе результатов этих
наблюдений. Изучая какое-либо явление, мы не можем охватить его во всем многообразии.
Отвлекаясь при изучении механического движения материальных тел от всего частного,
менее существенного, второстепенного и учитывая только те свойства, которые в данной
задаче являются определяющими, мы приходим к рассмотрению различных моделей
материальных тел, представляющих собой ту или иную степень абстракции.
Дадим определения основных моделей, используемых в теоретической механике.
1. Материальное тело, размерами и различием в движении отдельных точек
которого можно пренебречь в рамках рассматриваемой задачи, называется
материальной точкой.
2. Любое множество взаимодействующих материальных точек называется
механической системой.
3
3. Если расстояние между любыми двумя точками тела не изменяется при
любых механических взаимодействиях, то такое тело называется
абсолютно твёрдым.
Правильный выбор модели во многом определяет успех решения поставленной задачи.
Заметим, что среди перечисленных моделей наиболее общей, можно сказать
всеобъемлющей, является модель механической системы. Следовательно, и все
закономерности движения, установленные на основе этой модели, являются наиболее
общими. Всякая попытка конкретизации свойств механической системы, учёт особенностей
той или иной среды (жидкости, газа, упругого тела и т.д.) приводит, как правило, к столь
большому росту объёма информации, что возникает необходимость специализации,
возникают новые науки (теория упругости, гидродинамика. аэродинамика и т.д.).
1.3.
Основные законы механики
Теоретическая механика относится к числу так называемых аксиоматических наук. В ее
основе лежит система исходных положений – аксиом, принимаемых без доказательства, но
проверенных не только прямыми экспериментами, но и многовековой практикой
человечества. Справедливость следствий, логически вытекающих из этих основных
положений, также подтверждается экспериментальными данными.
Аксиома 1
Существует система отсчёта, по отношению к которой материальная
точка находится в покое или движется равномерно и прямолинейно, если на
неё не действуют силы.
Такая система отсчёта называется инерциальной, иногда ее условно называют
неподвижной.
Аксиома 2
В инерциальной системе отсчёта произведение массы материальной точки
на вектор ее ускорения равно приложенной к точке силе:
m W F
Здесь F – сила, действующая на материальную
точку; W – ее ускорение; m – масса
материальной точки, которая, как видно,
является мерой ее инертности.
В самом деле, одна и та же сила сообщает
точкам тем большее по модулю ускорение, чем
меньше их масса:
m1 W1 m2 W2 F
и следовательно, если
m1 m2
то
W1 W2 .
Аксиома 3
Две материальные точки взаимодействуют с силами, равными по модулю и
направленными по одной прямой в противоположные стороны (Рис.!.2).
4
Аксиома 4 (Принцип независимости действия сил.)
Если на материальную точку действует одновременно несколько сил, то
ускорение точки складывается из ускорений, которые имела бы точка под
действием каждой из этих сил в отдельности.
Пусть на точку с массой m действуют силы F1 F2 ... Fn каждая из которых сообщает
точке ускорения W1 W2 ...Wn Согласно второму закону Ньютона можно записать
mW1 F1 ;
mW2 F2 ...; mWn Fn
На основании принципа независимости действия сил получаем:
W W1 W2 ... Wn
1
F F2 ... Fn
m 1
или
n
mW Fk
k 1
Таким образом, движение материальной точки под действием системы сил будет таким
же, как при действии одной силы – их равнодействующей, равной геометрической сумме
всех сил.
Как видно, в основе механики лежит единственное количественное соотношение (второй
закон Ньютона), связывающее причину изменения движения – силу со следствием –
появлением у материальной точки ускорения. Прежде всего (в ближайших параграфах) мы
рассмотрим способы вычисления этих величин и действия над ними.
1.4.
Координатный способ задания движения точки
Движение точки по отношению к выбранной системе отсчёта считается заданным, если
известен способ, при помощи которого можно определить положение точки в любой момент
времени.
Положение точки M в системе отсчёта полностью
определяется её координатами. Если известна
зависимость координат от времени, движение точки
считается заданным. В зависимости от содержания
решаемой задачи можно использовать любую систему
координат (декартову, цилиндрическую, сферическую
и т.д.), наиболее целесообразную для данной задачи.
Мы, в основном, будем использовать прямоугольную
декартову систему координат., в которой законы
движения точки имеют вид:
x x t ;
y y t ; z z t ,
(1.1)
где t – время.
Вектор r , проведённый из начала координат в
точку M , называется радиусом–вектором точки. Координаты точки M одновременно
являются проекциями радиуса–вектора на координатные оси (Рис.1.3):
5
r xi y j z k
(1.2)
i j k – единичные векторы (орты) координатных осей.
Задавая координаты точки, мы тем самым задаем ее радиус-вектор. Наоборот, если задан
радиус-вектор, то раскладывая этот вектор по координатным осям, определяем координаты
точки. Иногда говорят о векторном способе задания движения точки, предполагая при этом,
что радиус-вектор задается как функция времени. Такой способ удобен для решения ряда
теоретических вопросов, поскольку он компактен и не связан с выбором конкретной системы
координат. Но при решении практических задач необходимо переходить к тому или иному
координатному способу задания движения точки.
где
Непрерывная кривая, которую описывает точка при своем движении,
называется траекторией точки.
Уравнения (1.1) представляют собой уравнения траектории в параметрической форме, где
роль параметра играет время t . Придавая параметру t ряд последовательных значений,
начиная с нуля, например, с интервалом в одну секунду, получаем ряд последовательных
положений точки в пространстве или на плоскости. Соединяя построенные точки плавной
кривой, получаем траекторию. Очевидны недостатки такого способа построения траектории.
С одной стороны он достаточно трудоемок, а с другой стороны его точность зависит от
выбранного для вычислений временного интервала.
Намного удобнее получить уравнение траектории в координатной форме. Для этого
необходимо из уравнений движения (1.1) исключить параметр t . При этом следует
учитывать только те значения координат, которые соответствуют неотрицательным
значениям параметра t .
1.5.
Скорость точки
Быстроту движения точки характеризует ее скорость, к определению которой мы сейчас
переходим. Пусть в момент времени t точка находится в положении M , которое
определяется радиусом–вектором r , а в момент t1 t t переходит в положение M 1 ,
радиус–вектор которого r1 r r (Рис.1.4). Вектор r называется вектором перемещения
точки за время t . Если разделить вектор перемещения на t , получим вектор того же
направления, что и r , который определяет среднюю по модулю и направлению скорость
точки за время t . Понятно, что средняя скорость зависит от выбранного промежутка
времени и тем точнее характеризует быстроту движения, чем меньшим выбран промежуток
времени t .
Скоростью точки в данный момент
времени называется предел отношения
вектора перемещения к промежутку
времени, за который это перемещение
произошло, при величине промежутка
времени, стремящейся к нулю:
V lim
t 0
r dr
.
t
dt
(1.3)
Таким образом,
вектор скорости равен первой
производной по времени от радиусавектора точки.
6
В пределе при M1 M секущая M M1 , по которой направлен вектор средней скорости,
занимает положение касательной к траектории в точке M . Следовательно,
вектор скорости направлен по касательной к траектории, причем в сторону
движения точки.
Пусть движение точки задано в координатной форме, т.е. уравнениями (1.1). Используя
равенство (1.2) и учитывая, что орты координатных осей со временем не изменяются,
получаем:
V
dr d
dx
dy
dz
x i y j z k i
j
k
dt dt
dt
dt
dt
(1.4)
Таким образом,
проекции вектора скорости на оси координат равны первым производным по
времени от соответствующих координат точки:
vx
1.6.
dx
x
dt
vy
dy
y
dt
vz
dz
z
dt
(1.5)
Ускорение точки
Быстроту изменения вектора скорости характеризует ускорение точки. Пусть в момент
времени t точка находится в положении M и имеет скорость V , а в момент t1 t t ,
переходит в положение M 1 и имеет скорость V1 V V
(Рис.1.5).
Ускорением точки называется предел отношения приращения вектора скорости к
промежутку времени, за который это приращение произошло, при величине промежутка
времени, стремящейся к нулю:
V dV d 2 r
W lim
2
t 0 t
dt
dt
(1.6)
Таким образом,
ускорение точки равно первой производной по времени от вектора скорости
точки или второй производной по времени от радиуса–вектора точки.
Если траектория плоская кривая,
то вектор ускорения лежит в
плоскости этой кривой и направлен в
сторону
ее
вогнутости.
Если
траектория пространственная кривая,
то при предельном переходе M1 M
плоскость, содержащая W ср (на
чертеже
заштрихована),
будет
поворачиваться вокруг вектора V и в
пределе займет положение, которое
называется
соприкасающейся
плоскостью к траектории в точке M .
Таким образом,
7
вектор ускорения точки лежит в соприкасающейся к траектории в данной точке
плоскости, причем направлен в сторону вогнутости траектории.
Пусть движение точки задано в координатной форме, т.е. уравнениями (1.1). Тогда
W
dv y
dv
dv
dV d
vx i v y j v z k x i
j z k
dt dt
dt
dt
dt
Таким образом,
проекции вектора ускорения на координатные оси равны первым производным
по времени от соответствующих проекций вектора скорости или, учитывая
равенства (1.5), вторым производным по времени от соответствующих
координат точки:
wx z
dvx
x
dt
wy
dvy
dt
y
wz
dvz
z
dt
(1.7)
ЛЕКЦИЯ 2
2.1.
Естественный способ задания движения точки
Пусть
траектория
точки
M
заранее известна. Рассматривая траекторию как
криволинейную координатную ось, примем любую
точку O траектории за начало отсчета и установим
положительное и отрицательное направления отсчета.
Положение точки M однозначно определяется
дуговой координатой, которая равна взятой с
соответствующим знаком длине дуги траектории,
отделяющей в данный момент времени точку M от
начала отсчета O (Рис.2.1). Движение точки будет
задано, если задана зависимость дуговой координаты
от времени: s s(t ) Описанный способ задания
движения называется естественным.
2.2. Естественный трехгранник
Пусть точка M движется по траектории AB , на которой установлена криволинейная
система отсчета (Рис.2.2).
В любой точке траектории существует единственная касательная. Обозначим
единичный вектор касательной; направлен в сторону возрастания дуговой координаты.
Нормаль, лежащая в соприкасающейся плоскости, называется главной нормалью. Обозначим
n единичный вектор главной нормали; n направлен в сторону вогнутости траектории.
Нормаль, перпендикулярная соприкасающейся плоскости, называется бинормалью. Её
единичный вектор b направлен так, чтобы векторы n и b образовывали правую тройку.
Соприкасающаяся, нормальная и спрямляющая плоскости образуют естественный
трехгранник. Касательная, главная нормаль и бинормаль – оси естественного трехгранника;
n b – орты этих осей.
Оси естественного трехгранника играют существенную роль в описании движения точки,
поскольку в этих осях вектор скорости и вектор ускорения вычисляются, как будет показано
8
ниже, наиболее удобным образом. Пока отметим только, что разложение этих векторов по
осям естественного трехгранника имеет вид:
V v
(2.1)
W w wn n
(2.2)
где
v – проекция вектора скорости на
направление
касательной
к
траектории;
w – проекция вектора ускорения
на направление касательной к
траектории, которая называется
касательным ускорением точки;
wn – проекция вектора ускорения
точки на направление главной нормали к траектории точки, которая называется нормальным
ускорением точки.
2.3.
Вычисление скорости точки при естественном способе задания ее движения
Пусть движение точки задано естественным способом. За промежуток времени t точка
переместится по траектории из положения M в положение M 1 (Рис.2.3).
Используя определение вектора скорости (1.4), получаем:
r
r
s
r s
lim
lim
lim
.
t 0 t
t 0 s t
s 0 s t 0 t
V lim
Предел отношения длины дуги к длине стягивающей ее хорды по модулю равен единице.
Если точка движется в положительном направлении (Рис.2.3а), s 0 и вектор r
s
совпадает по направлению с вектором r . Если точка движется в отрицательном
направлении отсчета (Рис.2.3), s 0 и вектор r
противоположен по направлению
s
9
вектору r . В обоих случаях предельное направление вектора r
s
совпадает с
r r
s 0 s
s
направлением единичного вектора касательной . Таким образом, lim
s ds
s
t 0 t
dt
Принимая во внимание, что lim
V
получаем:
ds
dt
(2.3)
Таким образом,
проекция вектора скорости на направление касательной к траектории точки
равна первой производной по времени от дуговой координаты:
v
2.4.
ds
s
dt
(2.4)
Вычисление ускорения точки при естественном способе
задания ее движения
Используя определение вектора ускорения (1.6) и формулу (2.1), получаем:
W
dv
dV d
d
(v ) v
dt dt
dt
dt
dv
d ds dv
d
v
v2
dt
ds dt
dt
ds
(2.5)
Вычислим вектор d dt . Прежде всего, найдем направление этого вектора. Рассмотрим
тождество
cos( ) 1
Дифференцируя это тождество по скалярному аргументу s , получаем:
d
d
0
ds
ds
или
d
0
ds
Но 1 0 в общем случае вектор изменяет со временем свое направление, так что
d
0 Следовательно, скалярное произведение обратилось в нуль потому, что
ds
сомножители взаимно перпендикулярны.
Таким образом, вектор d ds перпендикулярен касательной, т.е. направлен по нормали к
траектории. Ранее было показано, что вектор ускорения лежит в соприкасающейся
плоскости. Следовательно, речь идет о главной нормали. Таким образом,
d
d
n
ds
ds
(2.6)
10
Остается вычислить
d
lim
s
0
ds
s
Пусть M и M 1 две близкие точки траектории. В точке M проведем главную нормаль n
(Рис.2.4). В точке M 1 построим нормаль M1C , пересекающую в точке C главную нормаль,
построенную в точке M (если траектория плоская кривая, то M1C также будет главной
нормалью). Угол между двумя близкими касательными, угол , называется углом
смежности. В силу близости точек M и M 1 угол между нормалями MC и M1C
приближенно равен углу (для плоской кривой это равенство точное). В силу малости
дугу MM1 можно считать дугой окружности радиуса MC R . Тогда s R Из
равнобедренного треугольника AMB определяем
r AB 2 AM sin
2 sin
2
2
Тогда
dr
1 1
lim
lim
ds s 0 s s 0 R
(2.7)
где — предельное значение радиуса
окружности, дуга которой в бесконечно
малой окрестности точки M совпадает с
дугой
траектории.
Эта
окружность
расположена
в
соприкасающейся
плоскости, построенной для точки M . Ее
центр лежит на главной нормали и
называется центром кривизны траектории в
точке M . Ее радиус называется
радиусом кривизны траектории в точке M .
Подставляя (2.6) и (2.7) в (2.5), окончательно получаем:
W
dv
v2
n
dt
(2.8)
Следовательно, касательное и нормальное ускорения точки определяются по формулам:
dv
w s
dt
wn
v2
V
(2.9)
Ускорение точки характеризует изменение вектора скорости. В общем случае вектор
скорости может изменять свой модуль и свое направление.
Рассмотрим движение, при котором вектор скорости может изменять свое направление
(траектория точки – любая кривая), но модуль скорости остается при этом постоянным.
Такое движение называется равномерным. Как видно из формул (1.18) касательное
ускорение в этом случае равно нулю. При неравномерном движении касательное ускорение
обращается в нуль только в те моменты времени, когда модуль скорости достигает
экстремальных значений. Таким образом, касательное ускорение характеризует изменение
модуля скорости точки.
11
Рассмотрим движение, при котором вектор скорости может изменять свой модуль, но
направление скорости остается неизменным. Это возможно только при движении точки по
прямой. В этом случае нормальное ускорение равно нулю ( ) . При криволинейном
движении нормальное ускорение обращается в нуль только в моменты остановок точки или в
точках перегиба траектории. Таким образом, нормальное ускорение характеризует
изменение направления вектора скорости.
Заметим, что единственным движением, при котором ускорение точки тождественно
равно нулю, является равномерное прямолинейное движение.
ЛЕКЦИЯ 3
3.1.
Основные определения и аксиомы
Совокупность приложенных к телу сил называется системой сил.
Определение 1
Две системы сил называются эквивалентными, если приложение каждой из
них к одному и тому же покоящемуся свободному твёрдому телу приводят к
одному и тому же движению
Определение 2
Система сил, под действием которой свободное твердое тело может
оставаться в покое по отношению к инерциальной системе отсчета,
называется уравновешенной или эквивалентной нулю
Определение 3
Если система сил эквивалентна одной силе, то эта сила называется
равнодействующей системы сил
В основе действий над силами лежит система простейших правил, которые обычно
называют аксиомами статики.
Аксиома 1
Две силы, приложенные в одной точке тела, эквивалентны одной силе
(имеют равнодействующую), приложенной в той же точке и равной
геометрической сумме этих сил (Рис.3.1)
По существу, приведенное здесь утверждение содержится в сформулированном ранее
принципе независимости действия сил.
Рис.3.1
Рис.3.2
12
Аксиома 2
Не изменяя действия системы сил на тело, к ней можно добавлять или от
нее отбрасывать уравновешенную систему сил
Аксиома 3
Система двух сил, приложенная к абсолютно твердому телу, уравновешена
(эквивалентна нулю) тогда и только тогда, когда эти силы равны по модулю
и действуют по одной прямой в противоположные стороны (Рис.3.2).
Сформулированные аксиомы позволяют рассматривать систему сил, приложенную к
абсолютно твердому телу, как систему скользящих векторов. В самом деле, аксиома 1
позволяет рассматривать силу как вектор. Покажем, что это вектор скользящий.
Пусть в точке A абсолютно твердого тела
приложена сила FA . Выберем на линии
действия силы любую точку B , в которой
приложим уравновешенную систему сил
(Рис.3.3)
F , F 0,
B
B
причём
FB FB FA .
Силы FA и FB образуют уравновешенную
систему сил и, следовательно, могут быть
отброшены. Таким образом,
не изменяя действия силы на абсолютно
твердое тело, силу можно переносить в
любую точку ее линии действия.
3.2.
Момент силы относительно точки
Пусть дана сила F , приложенная в точке A абсолютно твердого тела, и некоторый центр
O (Рис.3.4).
Моментом
силы
относительно точки называется вектор, равный
векторному
произведению
радиуса-вектора,
проведенного из данной точки в точку приложения
силы, и этой силы:
M o F OA F r F
Из определения следует, что момент силы
относительно
точки
направлен
перпендикулярно
плоскости, содержащей силу и точку, относительно
которой вычисляется момент, причем в ту сторону,
откуда поворот силы вокруг точки виден против хода
часовой стрелки. Модуль момента силы относительно
точки равен произведению модуля силы на кратчайшее
расстояние от точки до линии действия силы (плечо
силы):
r F sin r F sin( ) r F sin F h
Mo F
13
Обычно вектор момента изображают в той точке, относительно которой он вычисляется.
3.3.
Момент силы относительно оси
Моментом силы относительно оси называется проекция на ось момента
силы, вычисленного относительно любой точки этой оси:
M z ( F ) M o F cos M o , k
Рассмотрим силу F , произвольным образом расположенную по отношению к оси z .
Проведем через точку приложения силы плоскость, перпендикулярную оси (Рис.3.5). Пусть
O – точка пересечения этой плоскости с осью. Разложим силу F на две составляющие, одна
из которых F1 перпендикулярна оси, а вторая F2 параллельна оси: F F1 F2 . Умножая
последнее равенство слева векторно на вектор OA , получаем:
OA F OA F1 OA F2
M o F M o F1 M o F2
или
Записывая последнее равенство в проекции
на ось z , получаем:
M z F M o F1 F1 h
перпендикулярен
так как вектор M o F2
оси и не дает на нее проекции.
Таким образом,
модуль момента силы относительно оси равен произведению модуля
проекции силы на плоскость, перпендикулярную оси, на кратчайшее
расстояние от оси до этой проекции. Момент силы относительно оси
больше нуля, если с положительного конца оси поворот силы вокруг оси виден
против хода часовой стрелки и отрицателен в противоположном случае.
Заметим, что момент силы относительно оси равен нулю, если линия действия силы
параллельна оси или пересекает ось. Другими словами, момент силы относительно оси равен
нулю, если ось и линия действия силы лежат в одной плоскости.
3.4.
Пара сил
Парой сил называется система двух сил, равных по модулю и действующих по
параллельным прямым в противоположные стороны.
Плоскость, в которой расположены силы пары, называется плоскостью действия пары
сил. Кратчайшее расстояние между линиями действия сил пары называется плечом пары сил.
Вычислим сумму моментов сил, образующих пару, относительно произвольно
расположенной точки O (Рис.3.6).
M o F1 M o F2 OA F1 OB F2
(OA OB) F1 BA F1 AB F2
тк
F1 F2
14
Как видно, сумма моментов сил, образующих пару, не зависит от выбора точки,
относительно которой она вычисляется.
Моментом пары сил M F1 , F2
или просто M называется сумма моментов
сил, образующих пару, вычисленная относительно произвольно выбранной
точки.
Момент пары можно вычислить как
момент одной из сил, образующих
пару, относительно точки приложения
другой силы пары. Момент пары –
вектор свободный, он располагается
перпендикулярно плоскости действия
пары сил, причем направлен в ту
сторону, откуда поворот пары виден
против хода часовой стрелки (Рис.2.6).
Модуль
момента
пары
равен
произведению модуля одной из сил
пары на плечо пары.
3.5.
Классификация сил
При изучении движения или равновесия какого–либо материального объекта
(механической системы) его мысленно выделяют из системы окружающих тел. При этом
механическое взаимодействие выделенного материального объекта с окружающей средой
учитывают, вводя в рассмотрение силы, являющиеся мерой этого механического
взаимодействия.
Силы, действующие на механическую систему, разделяют на внешние и внутренние.
Внутренними F i называют силы взаимодействия между точками данной
механической системы. Внешними
F e называют силы, с которыми на
точки данной механической системы действуют окружающие тела, не
входящие в систему.
Часть внешних сил обычно заранее известна — задана. Эти силы называются активными.
Как правило, не указывается, со стороны какого тела приложена та или иная активная сила,
дан лишь результат взаимодействия механической системы с этим телом — сила.
Другую часть внешних сил составляют реакции связей. Это силы, с которыми на
механическую систему действуют тела, находящиеся с ней в непосредственном контакте.
Такие тела называются связями. Связи ограничивают перемещения точек механической
системы. Под действием активных сил механическая система стремится совершить
перемещение, ограниченное связью. При этом она действует на связь с некоторой силой. В
соответствии с третьим законом Ньютона связь, в свою очередь, действует на механическую
систему с силой реакции. Реакции связей заранее неизвестны, они зависят от вида связи и от
приложенных активных сил. Для определения реакций связей необходимо решить
соответствующую задачу механики.
15
ЛЕКЦИЯ 4
4.1.
Дифференциальные уравнения движения механической системы
Рассмотрим механическую систему, состоящую из n материальных точек. Для каждой
точки системы в инерциальной системе отсчета справедлив второй закон Ньютона:
mk
d 2 rk
Fke Fki
2
dt
k 1 2… n
(4.1)
где
mk – масса точки с номером k ;
rk – ее радиус–вектор;
Fke – равнодействующая всех внешних сил как активных, так и реакций связей,
действующих на точку с номером k ;
Fki – равнодействующая всех внутренних сил, действующих на точку с номером k .
Систему уравнений (4.1) называют системой дифференциальных уравнений движения
точек механической системы. Одна из основных задач механики состоит в том, чтобы, зная
активные силы и связи, наложенные на систему, определить движение всех точек системы и
определить реакции связей. Решение такой задачи связано с интегрированием системы
уравнений (4.1) при заданных начальных условиях. Однако, прямое интегрирование системы
(4.1) весьма сложно, что связано как с возможно большим числом этих уравнений, так и, в
основном, с неопределенностью информации о внутренних силах.
Во многих практически интересных случаях нет необходимости определять все
интегралы системы (4.1), достаточно получить лишь некоторые из них. Это позволяют
сделать общие теоремы динамики. Являясь прямым следствием уравнений (4.1), общие
теоремы динамики связывают основные динамические величины, характеризующие
движение системы, с приложенными к ней внешними силами.
4.2.
Основные свойства внутренних сил
Рассмотрим две любые точки механической системы M i и M j . В соответствии с третьим
законом Ньютона они взаимодействуют с силами, равными по модулю и действующими по
одной прямой в противоположные стороны
(Рис.4.1). При этом
F ij F ji
или
Внутренние
поэтому
силы
i
i
F ij F ji 0
i
действуют
i
попарно,
сумма всех внутренних сил механической
системы равна нулю:
n
F 0
k 1
i
k
(4.2)
Найдем сумму моментов сил F iij и F iji относительно произвольно выбранной точки O .
Как следует из определения, моменты этих сил противоположны по направлению и равны по
16
модулю. Следовательно, их сумма равна нулю. Учитывая, что внутренние силы всегда
действуют попарно, получаем второе основное свойство внутренних сил:
M F 0
n
k 1
i
k
o
т.е. сумма моментов всех внутренних сил механической
относительно произвольно выбранного центра равна нулю.
4.3.
(4.3)
системы
Теорема об изменении количества движения механической системы
Сложим почленно все равенства (4.1):
n
n
d 2 rk
e
mk 2 Fk Fki
dt
k 1
k 1
k 1
n
Учитывая первое основное свойство внутренних сил (3.2), получаем:
n
d 2 rk
mk 2 Fke
dt
k 1
k 1
n
(4.4)
Преобразуем левую часть равенства (4.4). Учитывая, что масса точки считается
постоянной и что drk dt Vk получаем:
n
d 2 rk
d
d n
mk 2
mkVk mkVk
dt
dt k 1
k 1
k 1 dt
n
Произведение массы точки на вектор ее скорости q mV называется количеством
движения материальной точки.
Количеством движения механической системы называется сумма количеств
движения всех ее точек :
n
n
k 1
k 1
Q qk mkVk
(4.5)
dQ n e
Fk
dt k 1
(4.6)
Равенство (3.4) принимает вид:
Доказана теорема об изменении количества движения механической системы:
производная по времени от количества движения механической системы
равна геометрической сумме всех приложенных к системе внешних сил.
4.4.
Теорема об изменении кинетического момента
Умножим каждое из уравнений (4.1) слева векторно на радиус–вектор соответствующей
точки
17
d 2 rk
rk mk 2 rk Fke rk Fki
dt
k 1 2… n
и сложим все полученные уравнения:
n
n
d 2 rk
e
rk mk 2 rk Fk rk Fki
dt
k 1
k 1
k 1
n
Учитывая второе основное свойство внутренних сил
(3.3), получаем:
n
rk mk
k 1
n
d 2 rk
M o Fke
2
dt
k 1
(4.7)
Вектор
называется моментом количества движения
lo r q r mV
материальной точки относительно центра O (Рис.4.2).
Заметим, что техника вычисления момента количества движения относительно центра или
оси такая же, как техника вычисления момента силы относительно центра или оси.
Сумма моментов количеств движения всех точек механической системы
относительно центра O называется моментом количества движения или
кинетическим моментом механической системы относительно центра O
n
n
k 1
k 1
Lo rk qk rk mkVk
Вычислим производную по времени от кинетического момента:
n
dLo d n
dV
n d
dr
rk mkVk
rk mkVk k mkVk rk mk k
dt
dt
dt k 1
k 1
k 1 dt
dt
Первое слагаемое в квадратной скобке равно нулю, так как векторно перемножаются два
коллинеарных вектора. Таким образом,
n
n
dLo
dV
d 2r
rk mk k rk mk 2k
dt
dt
dt
k 1
k 1
Сравнивая последний результат с левой частью равенства (4.7), получаем:
n
dLo
M o Fke
dt
k 1
(4.8)
Доказана теорема об изменении кинетического момента механической системы:
производная по времени от кинетического момента механической системы
относительно произвольно выбранного центра равна сумме моментов всех
приложенных к системе внешних сил относительно того же центра.
18
ЛЕКЦИЯ 5
5.1.
Условия равновесия
Остановимся на вопросах равновесия материальных тел, которые составляют
существенную часть раздела "Статика" курса теоретической механики.
Под равновесием в механике традиционно понимают состояние покоя тела по
отношению к выбранной системе отсчета. Равновесие по отношению к инерциальной
системе отсчета называют абсолютным. В дальнейшем будем говорить именно об
абсолютном равновесии.
Если механическая система покоится по отношению к выбранной системе отсчета, то
скорости всех ее точек в любой момент времени равны нулю и, следовательно, равны нулю
количество движения механической системы и ее кинетический момент, вычисленный
относительно произвольно выбранной точки. В этом случае из теоремы об изменении
количества движения (4.6) и теоремы об изменении кинетического момента (4.8) получаем:
M F 0
n
n
F 0
k 1
e
k
e
k
o
k 1
(5.1)
Принимая точку O за начало декартовой системы координат, запишем уравнения (5.1) в
проекциях на координатные оси:
Fkxe 0
M F 0
n
Fkye 0
M F 0
n
M F 0
n
k 1
k 1
F 0
k 1
e
kz
n
k 1
ox
e
k
n
k 1
oy
e
k
(5.2)
n
k 1
oz
e
k
Таким образом,
для равновесия механической системы необходимо, чтобы сумма проекций
всех приложенных к системе внешних сил на каждую из трех взаимно
перпендикулярных осей равнялась нулю и сумма моментов всех внешних сил
относительно этих осей равнялась нулю.
Вообще говоря, условия (5.2) являются также и достаточными условиями равновесия
абсолютно твердого тела, но доказательство этого утверждения выходит за рамки
рассматриваемого здесь курса. Для геометрически изменяемой механической системы эти
условия будут только необходимыми.
5.2.
Равновесие системы сил, линии действия которых лежат в одной
плоскости
Во многих практически интересных случаях тело находится в равновесии под действием
системы сил, линии действия которых расположены в одной плоскости. Примем эту
плоскость за координатную
xy . Ни одна из сил такой системы не дает проекции на
координатную ось z и не имеет момента относительно осей x и y . В условиях равновесия
19
произвольной системы сил (5.2) в рассматриваемом случае остается только три значащих
уравнения:
n
Fkxe 0
k 1
n
Fkye 0
k 1
M F 0
n
k 1
oz
e
k
(5.3)
где O – произвольно выбранная точка плоскости xy . При этом для вычисления момента
силы относительно оси z применимо простое правило:
M oz F F h
где h — плечо силы, равное кратчайшему расстоянию от точки O до линии действия силы
(Рис.5.1); знак "+" соответствует повороту силы вокруг оси Oz против хода часовой стрелки.
Для получения наиболее простых уравнений
равновесия имеет смысл одну из координатных осей
проводить
перпендикулярно
линиям
действия
возможно большего числа неизвестных сил, а за
моментную принимать точку, через которую проходят
линии действия возможно большего числа неизвестных
сил.
При решении задач об определении сил реакций
опор предлагается следующая последовательность
действий.
1. Выбрать тело (или систему тел), равновесие
которого будет рассматриваться. Выбранное тело необходимо изобразить на чертеже.
Наложенные на тело внешние связи (опоры) при этом не рисуют.
2. Изобразить приложенную к выбранному телу активную нагрузку.
3. Ввести реакции связей, изобразив силы реакций на чертеже. Если направление
сил реакций заранее неизвестно, необходимо показать их составляющие.
4. Составить условия равновесия для системы сил, приложенной к
рассматриваемому телу. Эта система сил состоит из всех активных сил и всех реакций
внешних связей.
5. Определить неизвестные.
Рассмотрим особенности решения задач, в которых наряду с силами на тело действует
пара сил ( F1; F2 ) с моментом M . .Наличие пары сил можно отразить на чертеже различными
способами (Рис. 5.2), из которых наиболее удобным представляется последний
При составлении уравнений равновесия следует учитывать, что в условия равенства нулю
суммы проекций всех сил на любую координатную ось входящие в пару силы F1 и F2
никакого вклада не внесут, так как сумма проекций этих сил на любую координатную ось
20
равна нулю ( F1 F2 ) . В уравнении моментов к моментам прочих сил алгебраически
прибавляется момент пары, точнее проекция на ось z вектора момента пары, так как сумма
моментов сил пары относительно любого центра равна моменту пары.
При решении задач об определении опорных реакций может оказаться, что из
составленных условий равновесия невозможно определить все неизвестные величины, так
как их число больше числа уравнений, в которые эти неизвестные входят. Подобное может
произойти по двум основным причинам.
Во–первых, на рассматриваемое тело могут быть наложены лишние связи, ненужные для
обеспечения равновесия абсолютно твердого тела, но необходимые для предотвращения
недопустимо больших деформаций. В этом случае задача определения реакций опор
является статически неопределимой в том смысле, что невозможно определить реакции
связей без учета деформаций тела, т.е. оставаясь в рамках модели абсолютно твердого тела.
Такие задачи в теоретической механике не рассматриваются.
Во–вторых, в качестве тела, равновесие которого рассматривается, может быть выбрана
конструкция, состоящая из двух или более тел, соединенных между собой внутренними
связями. На такую конструкцию заведомо приходится накладывать дополнительные связи,
обеспечивающие равновесие конструкции. Основная особенность решения таких задач
состоит в том, что необходимо рассматривать равновесие нескольких тел данной
конструкции.
5.3.
Расчет ферм
Особое место в ряду статических задач занимает расчет ферм. Фермой называется
жесткая конструкция из прямолинейных стержней (Рис.5.3). Если все стержни фермы и вся
приложенная к ней нагрузка расположены в одной плоскости, ферма называется плоской. В
дальнейшем будем рассматривать только плоские фермы. Соединения стержней называются
узлами фермы.
В результате полного расчета фермы
необходимо определить реакции опор и
усилия во всех стержнях фермы.
При
расчете
ферм
приложенную
внешнюю нагрузку (включая весовую
нагрузку) заменяют эквивалентной системой,
силы которой приложены к узлам фермы. В
реальных фермах соединения стержней, как
правило, жесткие (заделка, сварка, клепка и
т.д.),
так
что
они
не
допускают
относительного поворота стержней. В
расчетной
схеме
крепления
стержней
считаются шарнирными, причем, трение в
шарнирах считается пренебрежимо малым.
В результате сделанных упрощающих предположений оказывается, что каждый стержень
находится в равновесии под действием двух сил, приложенных к его концам. Эти силы
должны иметь общую линию действия, т.е. они направлены вдоль стержня. Таким образом,
считается, что каждый стержень фермы работает или на растяжение, или на сжатие, но не
может испытывать кручения или изгиба. Усилие в стержне считается положительным, если
он растянут.
Метод вырезания узлов. Этот метод имеет смысл использовать, если необходимо
определить усилия во всех стержнях фермы. Метод состоит в том, что рассматривается
равновесие узлов фермы в определенной последовательности. На узел действует плоская
система сходящихся сил, для которой можно составить два уравнения равновесия, что
позволяет определить две неизвестные. Поэтому расчет начинают с узла, соединяющего два
21
стержня фермы. Затем переходят к соседним узлам в определенной последовательности,
которая позволяет на каждом шаге определять усилия в очередных двух стержнях.
Первоначально предполагается, что стержни растянуты, т.е. их реакции на узлы направлены
от узлов. Если усилие в каком–либо стержне оказывается отрицательным, то это означает,
что данный стержень сжат.
Заметим, что уравнения равновесия фермы в целом являются прямым следствием полной
системы уравнений равновесия узлов, так что методом вырезания узлов можно определить, в
том числе, и реакции опор фермы. Но в этом случае приходится совместно решать систему
из 2n уравнений ( n – число узлов). Предварительное определение реакций опор упрощает
решение задачи, а неиспользованные уравнения равновесия узлов можно рассматривать как
проверочные.
Метод сквозных сечений (метод Риттера). Этим методом удобно пользоваться для
определения усилий в отдельных стержнях фермы, в частности для проверочных расчетов.
Идея метода состоит в том, что ферма разделяется сечением на две части и рассматривается
равновесие одной из этих частей. Сечение проводится по трем стержням фермы, в которых
(или в одном из которых) требуется определить усилие. Действие отброшенной части фермы
заменяют соответствующими реакциями, направляя их вдоль разрезанных стержней от
узлов, т.е. считая стержни растянутыми (как и в методе вырезания узлов). Условия
равновесия составляются так, чтобы в каждое уравнение входила только одна неизвестная
величина.
Условие жесткости фермы. Найдем минимальное число стержней N , которое
необходимо для образования плоской фермы, имеющей n узлов. Простейшая ячейка фермы
(треугольник) имеет три стержня и три узла. Для присоединения каждого из оставшихся
n 3 узлов необходимо два стержня. Таким образом, условие жесткости фермы имеет вид:
N 3 2(n 3) 2n 3
Условие статической определимости фермы. Ферма является статически определимой,
если число неизвестных совпадает с числом независимых уравнений равновесия, в которые
этим неизвестные входят. Для плоской фермы, имеющей n узлов, можно составить 2n
уравнений равновесия, три из которых расходуются на определение трех составляющих
реакций опор. Для определения усилий в стержнях фермы остается 2n 3 уравнения. Таким
образом, условие статической определимости фермы совпадает с условием ее жесткости.
5.4.
Равновесие тела при наличии трения
Как известно, при скольжении тела по опорной поверхности возникает сопротивление,
тормозящее скольжение. Это явление учитывается путем введения в рассмотрение силы
трения.
Свойства силы трения устанавливаются по результатам
следующего эксперимента. На поверхности находится
тело, к которому приложены две активные силы:
нормальная к поверхности P , модуль которой в ходе
эксперимента не изменяется (например, сила тяжести тела
или ее составляющая), и касательная к поверхности сила
Q , модуль которой в ходе эксперимента постепенно
увеличивается (Рис.5.4). Со стороны поверхности
возникают в ответ нормальная реакция N и сила
трения F .
Установленные в результате обработки описанного эксперимента закономерности
сводятся к следующим положениям (законы Амантона–Кулона).
22
1. Сила трения действует в общей касательной плоскости к поверхностям
соприкасающихся тел и противоположна тому направлению, в котором
активно действующие силы стремятся сдвинуть тело.
2.Модуль силы трения при покое принимает всякий раз значение, необходимое
для предотвращения проскальзывания тела по поверхности, но не может
превзойти некоторого предельного значения, которое достигается на грани
перехода тела от состояния покоя к состоянию скольжения:
0 F Fmax
3.Максимальное значение силы трения при покое пропорционально модулю
силы нормальной реакции поверхности:
Fmax fo N
где f o — коэффициент трения при покое, который определяется
f o зависит от материала тел,
экспериментально. Коэффициент
шероховатости, влажности, температуры трущихся поверхностей, но на
его значение в широких пределах не влияют размеры площадки контакта
тел.
4.При скольжении тела по шероховатой поверхности сила трения
пропорциональна силе нормальной реакции поверхности:
F ck f N
и направлена в сторону, противоположную скольжению. Динамический
коэффициент трения f (коэффициент трения скольжения), помимо
прочего, может зависеть от относительной скорости скольжения.
5.5.
Центр параллельных сил
Это понятие вводится для системы параллельных сил, имеющих равнодействующую,
причем точки приложения сил системы – точки Ak считаются фиксированными.
Центром параллельных сил называется точка, вокруг которой
поворачивается равнодействующая системы параллельных сил при повороте
всех сил системы вокруг своих точек приложения в одну и ту же сторону на
один и тот же угол.
Найдем положение центра параллельных сил для системы сил {Fk } , имеющей
равнодействующую F (Рис.5.5). Пусть e – единичный вектор, параллельный линиям
действия сил системы. Любую силу системы можно представить в виде Fk Fk e где Fk –
проекция силы на направление единичного вектора e . Для равнодействующей получаем
F F e
n
причем
F Fk
k 1
Если система сил имеет равнодействующую, то момент равнодействующей относительно
любого центра равен сумме моментов всех сил системы относительно того же центра
23
(теорема Вариньона, доказательство которой мы опускаем). Обозначим
параллельных сил. Тогда
C – центр
n
OC F OAk Fk
(5.4)
k 1
или
n
OC F e OAk Fk e
k 1
Вынося за скобку общий множитель e , получаем:
OC F OAk Fk e 0
или
a e 0
где
n
a OC F OAk Fk
k 1
Векторное произведение равно
нулю, если один из сомножителей
равен нулю или если сомножители
коллинеарны. Но e 0 Повернем все
силы системы вокруг своих точек
приложения в одну и ту же сторону на
один и тот же угол. Вместе с силами в
ту же сторону и на тот же угол
повернется
вокруг
точки
C
равнодействующая системы сил. Так
же повернем вокруг точки O вектор
e . В результате этой операции вектор
e изменил свое направление, вектор a
остался неизменным, но по–прежнему
a e 0 Следовательно, a 0 т.е.
n
OC F OAk Fk
k 1
Отсюда
OC
5.6.
1 n
OAk Fk
F k 1
или
rc
1 n
rk Fk
F k 1
(5.5)
Центр тяжести тела
Рассмотрим материальное тело, расположенное вблизи поверхности Земли (в поле
земного притяжения). Допустим сначала, что тело состоит из конечного числа материальных
точек, другими словами – частиц, размерами которых можно пренебречь. На каждую
частицу действует сила тяжести G k . Если размеры тела малы по сравнению с размерами
Земли, то систему сил тяжести частиц можно рассматривать как систему параллельных сил,
направленных в одну сторону. Такая система сил всегда имеет равнодействующую
24
n
G Gk
n
модуль которой
k 1
G Gk
k 1
называется весом тела. При любом изменении ориентации тела по отношению к Земле силы
тяжести частиц остаются вертикальными, т.е. они поворачиваются по отношению к телу
вокруг своих точек приложения. Линия действия силы тяжести тела G при этом всегда
будет проходить через определенную точку — центр параллельных сил, который в
рассматриваемом случае называется центром тяжести тела. Таким образом, положение
центра тяжести тела, состоящего из конечного числа частиц, можно определить по формуле
(5.5):
1 n
rc Gk rk
G k 1
(5.6)
При определении положения центра тяжести сплошного тела это тело разбивается
сечениями, параллельными координатным плоскостям, на элементарные объемы (Рис.5.6) и
центр тяжести тела определяется как предел последовательности радиусов–векторов центров
тяжести системы элементарных объемов (частиц) при объеме каждой частицы, стремящемся
к нулю:
n
r G
k 1
r c lim n
G 0
k
k
G
k 1
k
где rk – радиус–вектор центра элементарного
объема; Gk – вес частицы.
Этот предел представляет собой, по
определению, интеграл
rc
1
r dG
G G
При вычислении подобных интегралов переходят к интегрированию по объему, для чего
вводится понятие удельного веса
G dG
0
d
(r ) ( x y z ) lim
где — элемент объема. Таким образом,
r r d
r d
rc
(5.7)
Формула (5.7) является наиболее общей для определения положения центра тяжести
сплошного тела.
Если удельный вес тела не зависит от координат, тело называется однородным. Для
однородных тел, полагая в формуле (5.7) (r ) const , получаем:
rc
1
r d
(5.8)
25
где – объем тела.
Если однородное тело представляет собой пластину постоянной толщины h const то
d h dS h S где S – площадь поверхности пластины. В этом случае для определения
положения центра тяжести тела необходимо вычислить поверхностный интеграл:
rc
1
r dS
S S
(5.9)
Если однородное тело представляет собой стержень с постоянной площадью поперечного
сечения const , то d dl L и формула (5.5) принимает вид:
rc
1
r dL
L L
(5.10)
где L – длина стержня.
Во многих случаях положение центра тяжести тела можно определить при помощи
весьма простых методов. Рассмотрим некоторые из них.
Симметрия однородных тел. Если однородное тело имеет плоскость симметрии, то
центр тяжести тела лежит в этой плоскости.
Если однородное тело имеет ось симметрии, то центр тяжести тела лежит на этой оси;
если однородное тело имеет центр симметрии, то центр тяжести тела совпадает с его
центром симметрии.
Метод разбиений состоит в том, что тело разбивается на конечное число частей,
положение центров тяжести которых известно. Положение центра тяжести тела определяется
по формуле (5.6).
Метод дополнений или метод отрицательных масс представляет собой частный случай
метода разбиений, применяется для тел имеющих вырезы (полости), вес которых (для
однородных тел – объем или площадь) считается отрицательным.
5.7.
Центр масс механической системы. Теорема о движении центра масс
Инерционные свойства материального тела определяются не только его массой, но и
характером распределения этой массы в теле. Существенную роль в описании такого
распределения играет положение центра масс тела.
Центром масс механической системы называется точка C , радиус–вектор
которой определяется по формуле
rc
1 n
mk rk
m k 1
(5.11)
где m – масса механической системы.
Нетрудно видеть, что положение центра масс тела, помещенного в однородное поле
силы тяжести, совпадает с положением его центра тяжести. При определении положения
центра масс тела можно пользоваться всеми методами, разработанными для определения
положения центра тяжести (метод симметрии, метод разбиений, метод отрицательных масс и
т.д.).
Ранее введена одна из основных динамических величин – количество движения
механической системы Q :
n
Q mkVk
k 1
(5.12)
26
Дифференцируя равенство (5.11) по времени
n
m V mV
k 1
k
k
c
и сравнивая результат с (5.12), получаем простой способ вычисления количества движения
механической системы:
Q mVc
(5.13)
где Vc – скорость центра масс механической системы; m – ее масса.
Подставляя (5.13) в теорему об изменении количества движения механической системы
(4.6), получаем закон движения центра масс:
n
dVc
m
Fke
dt
k 1
(5.14)
т.е.
центр масс механической системы движется так же, как материальная
точка, масса которой равна массе механической системы, и к которой
приложена сила, равная геометрической сумме всех внешних сил,
действующих на механическую систему.
Сформулированное утверждение в литературе обычно называют теоремой о движении
центра масс механической системы.
ЛЕКЦИЯ 6
Одной из важнейших задач механики является описание движения абсолютно твердого
тела. В общем случае различные точки тела движутся по разному, имея в данный момент
времени разные скорости и разные ускорения. Прежде всего, возникает вопрос о способе
задания положения тела в пространстве в любой момент времени, т.е. вопрос о способе
задания движения тела. Необходимо установить минимальное число параметров
(координат), задание которых полностью определяет положение тела. Минимальное число
таких параметров называется числом степеней свободы тела.
Следующая проблема состоит в том, чтобы, зная законы движения тела, определить
скорость и ускорение любой точки тела.
Движение тела происходит как следствие действия на него некоторой системы сил.
Задача состоит в том, чтобы, зная действующие на тело силы, определить законы его
движения.
Движение твердого тела по своему характеру разделяют на поступательное,
вращательное, плоскопараллельное, сферическое и движение свободного твердого тела.
6.1.
Поступательное движение твердого тела
Поступательным называется движение твердого тела, при котором любая
прямая, проведенная в теле, остается параллельной своему первоначальному
положению во все время движения.
Рассмотрим две любые точки A и B тела. В любой момент времени имеет место
равенство (Рис.6.1)
rB rA AB
(6.1)
27
причем, AB const Модуль AB не изменяется, так как тело абсолютно твердое;
направление AB не изменяется, так как движение поступательное.
Из равенства (6.1) следует, что траектория точки B может быть получена из траектории
точки A смещением всех ее точек на постоянный вектор. Таким образом, все точки тела при
поступательном движении описывают одинаковые (при наложении совпадающие)
траектории.
Дифференцируя равенство (6.1) по времени, получаем, что в любой момент времени все
точки тела имеют одинаковые скорости
VA VB VC ... VM
и одинаковые ускорения
WA WB WC ... WM .
Таким образом,
поступательное движение твердого тела
полностью характеризуется движением
одной (любой) его точки. Чтобы задать
поступательное
движение
тела,
достаточно задать закон движения одной
из его точек, например, центра масс тела:
xc x(t )
yc y(t )
zc z (t ) (6.2)
Теорема о движении центра масс механической системы (5.11) позволяет получить
дифференциальные уравнения поступательного движения твердого тела
n
mxc F
k 1
e
kx
n
myc F
k 1
e
ky
n
mzc Fkze
(6.3)
k 1
решая которые при известных внешних силах и заданных начальных условиях, получаем
законы поступательного движения (6.2).
6.2.
Вращение твердого тела вокруг неподвижной оси
Кинематика вращательного движения твердого тела
При вращательном движении в теле существует
единственная прямая, все точки которой остаются
неподвижными. Эта прямая называется осью вращения.
Чтобы получить вращательное движение, можно шарнирно
закрепить две точки тела (Рис.6.2).
Проведем в теле сечение, перпендикулярное оси
вращения. Через любую точку сечения M проведем
перпендикуляр к сечению ( DC ) . Отрезок DC во все время
движения остается параллельным оси вращения, т.е.
движется поступательно. Таким образом, положение сечения
полностью определяет положение тела в системе отсчета.
Рассмотрим движение сечения (Рис.6.3). Положение
сечения полностью определяется положением любого
28
отрезка OM , пересекающего ось вращения Oz . Положение отрезка OM , а следовательно,
положение тела можно задать углом , который отсчитывается от некоторой неподвижной
прямой (например, оси Ox ). Чтобы задать движение, нужно задать закон изменения угла
поворота со временем:
(t )
Рис. 6.3
Рис. 6.4
Вычислим скорость любой точки M тела. Траектория точки M известна – это
окружность с центром O , лежащим на оси вращения, радиус которой hM OM равен
кратчайшему расстоянию от точки до оси вращения (Рис.6.4). Вектор скорости VM
направлен по касательной к этой окружности, т.е. перпендикулярен отрезку OM . Дугу
s M o M можно рассматривать как дуговую координату точки. Длина дуги окружности
связана с центральным углом формулой
s hM
Принимая во внимание формулу (2.4), получаем:
vM
ds d
d
( hM ) hM
dt dt
dt
d
dt
скоростью тела.
Величина
Окончательно получаем:
называется угловой
vM hM
(6.4)
Формула (6.4) называется формулой Эйлера. На
Рис.6.5 представлено распределение скоростей точек
сечения тела, перпендикулярного оси вращения.
Вычислим ускорение любой точки M тела.
Поскольку траектория точки окружность, находим касательное и нормальное ускорения
точки. В соответствии с формулами (2.9) получаем:
dv
d
d
wM M hM
hM
dt
dt
dt
Величина
d
dt
vM2 hM
w
2 hM
hM
hM
2
n
M
называется угловым ускорением тела.
29
Окончательно получаем:
wM hM
wMn 2 hM
На Рис.6.6 изображены составляющие вектора ускорения точки M
ускоренного и замедленного вращений.
(6.5)
для случаев
Остановимся на частных случаях вращательного движения твердого тела.
Равнопеременным называется вращение с постоянным угловым ускорением
const o .
d
o получаем закон изменения угловой скорости
dt
Интегрируя уравнение
при равнопеременном вращении
o o t
(6.6)
где o — начальная угловая скорость тела.
Интегрируя уравнение
d
o o t получаем закон равнопеременного вращения
dt
t2
o o t o
(6.7)
2
где o — начальный угол поворота тела.
Равномерным называется вращение с постоянной угловой скоростью
const o
Полагая в формуле (6.7) o 0 получаем закон равномерного вращения:
o o t
(6.8)
При равномерном вращении часто используют внесистемную характеристику быстроты
вращения тела – число оборотов в минуту n . Установим связь между o и n . За одну
минуту (т.е. за 60 секунд) тело, совершающее n оборотов в минуту, повернётся на угол 2 n
радиан. Из формулы (6.8) получаем:
o
o
t
n
30
30
Дифференциальное уравнение вращательного движения твердого тела
Вращение твердого тела, как и любое другое движение, происходит в результате
воздействия внешних сил. Для описания вращательного движения используем теорему об
изменении кинетического момента относительно неподвижного центра (4.8), записанную в
проекциях на ось вращения, которую примем за координатную ось Oz (Рис.6.9):
n
dLz
M z Fke
dt
k 1
(6.9)
Вычислим кинетический момент тела относительно оси вращения. Любая точка (частица)
тела M k описывает окружность, плоскость которой перпендикулярна оси вращения, а
радиус равен кратчайшему расстоянию от точки до оси hk . Учитывая формулу Эйлера (6.4),
получаем момент количества движения точки M k относительно оси Oz :
lzk hk vk mk hk2 mk
где mk – масса частицы с номером k .
Суммируя моменты количеств движения точек и переходя к пределу при массе частицы
стремящейся к нулю, получаем кинетический момент тела относительно его оси вращения:
n
Lz lim lk lim hk2 mk h2 dm J z
m0
k 1
m0
(6.10)
m
Величина
J z h2 dm ( x 2 y 2 ) dm
m
(6.11)
m
называется
моментом
инерции
тела
относительно оси Oz . Моменты инерции
характеризуют распределение массы в теле
и играют существенную роль в описании
движения материальных тел. Подробнее
вопрос о моментах инерции будет
рассмотрен ниже. Сейчас заметим только,
что в рассматриваемом случае J z const
так как во время вращения расстояния от
точек тела до оси вращения остаются
постоянными.
Подставляя результат (6.10) в равенство
(6.9), получаем:
Jz
n
d
M z Fke
dt k 1
(6.12)
Уравнение (6.12) называется дифференциальным уравнением вращательного движения
твердого тела. Оно позволяет, зная приложенные к телу внешние силы, определить закон
изменения угловой скорости тела и, следовательно, закон вращения (t )
Заметим, что в уравнение (6.12) не входят неизвестные реакции шарниров O и A ,
поскольку они не создают момента относительно оси вращения.
31
Моменты инерции
Как видно из уравнения (6.12), осевой момент инерции играет роль меры инертности тела
при вращении.
Вместо осевого момента инерции иногда используют радиус инерции тела относительно
оси, под которым понимают расстояние от оси до точки, в которой нужно сосредоточить
массу всего тела, чтобы момент инерции точки относительно данной оси равнялся моменту
инерции тела относительно той же оси:
J z m z2
При вычислении осевых моментов инерции часто бывает полезной теорема Гюйгенса–
Штейнера:
момент инерции тела относительно оси Oz равен
сумме момента инерции тела относительно оси
Cz , проходящей через центр масс тела
параллельно данной оси, и произведения массы
тела на квадрат расстояния между осями.
Пусть оси Oz и Cz параллельны, причем ось Cz
проходит через центр масс тела. Примем центр масс
за начало системы координат и проведем ось Cy так,
чтобы она пересекала ось Oz (Рис.6.10).
Выделим в теле элементарный объем массой dm
и опустим из него перпендикуляры на оси Oz и Cz .
По теореме косинусов
2 2 h2 2 h cos 2 h2 2h y
где y — координата элементарного объема. Согласно формуле (6.11) получаем:
J z x 2 y 2 dm 2 dm 2 h 2 2hy dm 2dm h2 dm 2h ydm
m
m
m
m
m
Первый интеграл равен моменту инерции J zc относительно оси Cz , второй – массе тела
m , третий – нулю, так как согласно формуле (5.7)
ydm lim y m my 0
m
m0
k
k
c
поскольку центр масс принят за начало координат. Таким образом,
J z J zc m h2
6.3.
(6.13)
Плоскопараллельное движение твердого тела
Кинематика плоскопараллельного движения твердого тела
Движение тела называется плоскопараллельным, если расстояние от любой
точки тела до некоторой неподвижной (основной) плоскости остается
неизменным во все время движения
32
Проведем сечение тела параллельное основной плоскости (Рис.6.11). Через любую точку
A сечения проведем отрезок CD , перпендикулярный основной плоскости. Из определения
плоскопараллельного движения следует, что отрезок CD движется поступательно.
Таким образом, движение сечения полностью определяет плоскопараллельное движение
тела.
Рис. 6.11
Рис. 6.12
Рассмотрим движение сечения (плоской фигуры) в своей плоскости (Рис.6.12). Пусть A
любая точка плоской фигуры. Примем точку A за начало системы координат Axyz , оси
которой движутся поступательно по отношению к основной системе Oxyz . По отношению к
системе Axyz плоская фигура может только вращаться вокруг подвижной оси Az .
Чтобы задать положение плоской фигуры, а следовательно, и всего тела, необходимо
задать положение точки A – полюса, а также задать вращение плоской фигуры по
отношению к системе Axyz .Таким образом, закон плоскопараллельного движения тела
имеет вид:
xA x(t )
yA y(t )
(t )
т.е. при плоскопараллельном движении тело имеет три степени свободы.
Вычислим скорость любой точки M тела.
VM
drM drA d AM
VA VM A .
dt
dt
dt
(6.14)
Вектор VM A представляет собой скорость,
полученную точкой M при вращении плоской фигуры
вокруг
оси
Этот
вектор
направлен
Az .
перпендикулярно отрезку AM (по касательной к
окружности, которую описывает точка M при
вращении тела вокруг оси Az ), причем в сторону
вращения тела (Рис.6.17). В соответствии с формулой
Эйлера
vM A AM
Поскольку вектор VM A перпендикулярен отрезку AM , из формулы (6.14) получаем
полезное для практических целей утверждение, которое обычно называют теоремой о
проекциях:
33
проекции скоростей концов отрезка, соединяющего две точки абсолютно
твердого тела, на направление этого отрезка равны.
Как уже говорилось, за полюс можно принять любую точку плоской фигуры. В данный
момент времени различные точки тела имеют разные скорости. За полюс имеет смысл
принимать точку, скорость которой в данный момент времени равна нулю.
Точка, принадлежащая плоской фигуре или неизменно с ней связанная,
скорость которой в данный момент времени равна нулю, называется
мгновенным центром скоростей.
Примем за полюс мгновенный центр скоростей K .
В соответствии с формулой (6.14), получаем, что
скорость любой точки
плоской фигуры
M
определяется так же, как если бы тело вращалось вокруг
оси Kz (Рис.6.14):
VM VK VM K VM K ,
так как
VK 0
Рассмотрим способы определения положения
мгновенного центра скоростей.
1. Пусть известны направления скоростей двух
точек A и B плоской фигуры, причем вектор VA не
параллелен вектору VB . Как видно из Рис.6.14, в этом случае мгновенный центр скоростей
лежит в точке пересечения перпендикуляров, проведенных через точки A и B к векторам
скоростей этих точек.
2. Пусть известны направления скоростей двух точек A и B , причем вектор VA
параллелен вектору VB , но отрезок AB не перпендикулярен скоростям (Рис.6.15). Проекции
скоростей точек A и B на направление AB , в соответствии с теоремой о проекциях, равны
между собой
vA cos vB cos
и, следовательно, равны между собой векторы скоростей
VA VB .
Используя формулу
VB VA VB A
получаем
VB A 0
те
vB A AB 0
те
0
Таким образом, в данный момент времени угловая
скорость тела равна нулю и скорости всех точек тела одинаковые. Имеем мгновенно
поступательное распределение скоростей. Что касается положения мгновенного центра
скоростей, то как видно из Рис.6.15, перпендикуляры к скоростям оказываются
параллельными. Можно считать, что мгновенный центр скоростей находится в бесконечно
удалённой точке.
3. Пусть скорости точек A и B параллельны между собой и перпендикулярны отрезку
AB (Рис.6.16). В этом случае перпендикуляры к скоростям сливаются. Положение
мгновенного центра скоростей K на перпендикуляре AB можно определить из соображений
34
пропорциональности модулей скоростей расстояниям от точек до мгновенного центра
скоростей. Расстояние AK можно определить из системы уравнений
vA AK
vB BK
AK BK AB
которую удобнее всего решить графически. Заметим, что в рассматриваемом случае для
определения положения мгновенного центра скоростей кроме направления скоростей двух
точек необходимо знать и их модули.
Рис. 6.16
Рис. 6.17
4. Особый интерес представляет случай качения колеса по неподвижной поверхности.
Если колесо катится без проскальзывания, то мгновенный центр скоростей находится в точке
касания колеса и опорной поверхности (Рис.6.17).
6.4.
Система Кенига. Первая теорема Кенига
Пусть система отсчета Oxyz неподвижная (инерциальная). Система Cxyz движется
поступательно по отношению к Oxyz , причем ее начало во все время движения совпадает с
центром масс механической системы (Рис.6.18). Такая система координат называется
системой Кенига.
Установим связь между кинетическими моментами механической системы относительно
неподвижного центра O и относительно центра масс механической системы C . По
определению кинетического момента:
n
n
k 1
k 1
n
n
k 1
k 1
Lo rk mkVk rk k mk Vk Vk rk mkVc rc mkVc
n
n
k 1
k 1
k mkVc k mkVk .
Здесь Vk – скорость точки M k по отношению к системе Кенига.
Вычислим каждую из четырех сумм, входящих в равенство (6.15).
n
n
n
k 1
k 1
k 1
rc mkVc rc mkVc rc Vc mk rc mVc ,
где m – масса всей системы.
n
n
k 1
k 1
rc mkVk rc mkVk rc mVc 0
(6.15)
35
здесь использована формула (4.5) и
учтено, что Vc 0
n
n
k mkVc mk k Vc
k 1
k 1
mk k Vc m c Vc 0
k 1
n
здесь использована формула (5.11)
и учтено, что c 0 . Последняя
сумма
представляет
собой
кинетический момент механической
системы по отношению к ее центру
масс.
n
Lc k mkVk
Обозначим
k 1
Подставляя полученные результаты в формулу (6.15), находим:
Lo rc mVc Lc .
(6.16)
Равенство (6.16) составляет содержание первой теоремы Кёнига.
6.5.
Теорема об изменении кинетического момента относительно центра
масс механической системы
Подставим результат (6.16) в теорему об
относительно неподвижного центра O (4.8):
изменении
кинетического момента
n
d
Lc rc mVc rk Fke
dt
k 1
или
n
dLc drc
dVc
mVc rc m
rc k Fke .
dx dt
dt
k 1
Второе слагаемое в левой части равенства равно нулю, как скалярное произведение
коллинеарных сомножителей. Используя теорему о движении центра масс (5.11), получаем:
n
n
n
dLc
e
e
rc Fk rc Fk k Fke
dt
k 1
k 1
k 1
или
n
dLc
M c Fke .
dt
k 1
(6.17)
Таким образом,
производная по времени от кинетического момента механической системы
относительно ее центра масс равна сумме моментов относительно центра
масс всех приложенных к системе внешних сил.
36
6.6.
Дифференциальные уравнения плоско-параллельного
движения твердого тела
При изучении кинематики плоско-параллельного движения твердого тела за полюс
можно принимать любую точку тела. При решении задач динамики за полюс всегда
принимают центр масс тела, а в качестве подвижной системы отсчета используют систему
Кенига.
Такой выбор связан, прежде всего, с тем, что теорема о движении центра масс (5.11)
позволяет получить дифференциальные уравнения, служащие для определения законов
движения полюса – центра масс:
n
n
mxc Fkxe
m yc Fkye
k 1
(6.18)
k 1
Во-вторых, теорема об изменении кинетического момента относительно центра масс
(6.17) позволяет описать вращение тела вокруг оси Cz . Учитывая, что при вращении тела
Lcz J zc
получаем дифференциальное уравнение, позволяющее определить закон вращения:
J zc
n
d
M cz Fke
dt k 1
(6.19)
где J zc – момент инерции тела относительно оси Кенига Cz .
ЛЕКЦИЯ 7
7.1. Кинетическая энергия механической системы и твердого
тела
Половина произведения массы точки на квадрат ее скорости называется
кинетической энергией материальной точки. Кинетической энергией
механической системы называется сумма кинетических энергий всех ее
точек.
mk vk2
2
k 1
n
T
(7.1)
При вычислении кинетической энергии часто бывает полезной, так называемая, вторая
теорема Кенига, устанавливающая связь между кинетической энергией механической
системы относительно неподвижной системы отсчета и кинетической энергией, полученной
системой в относительном движении по отношению к системе координат Кенига.
2
1 n
1 n
2
T mk vk mk Vk Vk
2 k 1
2 k 1
n
vc2 n
mvc2
1 n
2
m
V
m
V
m
v
Vc mVc Tcr
k
c
k k
k k
2 k 1
2 k 1
2
k 1
37
где Tcr – кинетическая энергия, полученная механической системой в ее относительном
движении по отношению к системе Книга. Поскольку Vc 0 окончательно получаем:
mvc2
T
Tcr
2
(7.2)
Получим формулы для вычисления кинетической энергии абсолютно твёрдого тела при
некоторых его движениях.
1. При поступательном движении в любой момент времени скорости всех точек тела
одинаковые. Полагая в формуле (7.1) Vk Vc получаем:
T
vc2 n
mvc2
1 n
2
m
v
m
k k 2
k
2 k 1
2
k 1
(7.3)
где vc – скорость центра масс тела.
2. При вращении скорости точек тела пропорциональны расстояниям от точек до оси
вращения. Полагая в формуле (7.1) vk hk получаем:
Jz 2
1 n
2 n
2
2
T mk vk
mk hk 2
2 k 1
2 k 1
(7.4)
где J z – момент инерции тела относительно оси вращения.
3. При плоскопараллельном движении тело по отношению к системе Кенига совершает
вращение вокруг оси Cz . Используя вторую теорему Кенига (7.2) и формулу (7.4),
получаем:
mvc2 J zc 2
T
2
2
(7.5)
где J zc – момент инерции тела относительно оси Cz
7.2.
Работа и мощность силы
Пусть точка M движется по известной траектории; F — одна из сил, действующих на
точку (Рис.7.1).
Скалярное произведение силы на скорость точки ее приложения называется
мощностью силы:
N F V
(7.6)
Элементарной работой силы называется работа, выполненная за бесконечно
малое время:
d A N dt
В зависимости от используемого способа задания движения точки ее скорость может
быть вычислена по одной из следующих формул:
V
dr
x i y j z k s
dt
38
Таким образом, для вычисления элементарной работы силы получаем формулы:
d A N dt F dr Fx dx Fy dy Fz dz F ds
(7.7)
Работа силы на конечном перемещении M1M 2 определяется как сумма соответствующих
элементарных работ, т.е. как криволинейный интеграл, взятый вдоль дуги M1M 2 траектории:
AM1M 2 F ds Fx dx Fy dy Fz dz
M1M 2
(7.8)
M1M 2
В общем случае сила может зависеть от координат точки приложения силы, ее скорости и
времени. Таким образом, для вычисления работы силы в общем случае необходимо знать
траекторию точки приложения силы и закон ее движения по траектории. Однако, при
решении большинства задач динамики именно закон движения точки и является искомым.
Рассмотрим силы, которые зависят только от положения точки, т.е. от ее координат, и
времени. Такие силы называются позиционными. Физическое пространство, в котором на
материальную точку действуют позиционные силы, называется силовым полем. В случае
действия на точку позиционных сил интеграл (7.8) может быть вычислен, если известна
только траектория точки приложения силы.
Особый класс составляют силы, работа которых не зависит от траектории, а определяется
только начальным и конечным положениями точки. Такие силы называются
потенциальными.
Очевидно, что вычисление интеграла (7.8) лишь по известным начальному и конечному
положениям точки возможно только в том случае, когда подинтегральное выражение
представляет собой полный дифференциал некоторой функции координат:
d A F dr dU ( x y z )
(7.9)
Скалярную функцию U ( x y z ) называют потенциальной энергией материальной точки.
Потенциальная энергия определяется из равенства (7.9) с точностью до произвольной
постоянной. Выбор произвольной постоянной диктуется соображениями удобства решения
конкретной задачи.
Как следует из (7.8) и (7.9), работа потенциальной силы равна разности значений
потенциальной энергии в начальном и конечном положениях:
U2
AM1M 2 d A dU U1 U 2
M1M 2
U1
(7.10)
39
Считая положение точки M 1 произвольным и выбирая произвольную постоянную так,
чтобы U 2 0 получаем, что потенциальная энергия равна работе сил поля, совершенной при
перемещении точки из занимаемого ею положения в некоторое нулевое.
В соответствии с равенством (7.7)
U
U
U
d A Fx dx Fy dy Fz dz
dx
dy
dz dU
y
z
x
и, следовательно,
Fx
7.3.
U
x
Fy
U
y
Fz
U
z
(7.11)
Некоторые частные случаи вычисления работы силы
Работа силы тяжести
При вычислении работы силы тяжести будем считать, что мы рассматриваем
ограниченную область пространства вблизи поверхности Земли, размеры которой малы по
сравнению с размерами Земли.
Направим ось z вертикально вверх. Точка M с
массой m перемещается по некоторой траектории
из положения M 1 в положение M 2 (Рис.7.2).
Проекции силы тяжести на оси координат равны:
Fx Fy 0 Fz mg
где g — ускорение
свободного падения.
Вычислим работу силы тяжести. Используя
формулу (7.8), получаем:
AM1M 2 Fx dx Fy dy Fz dz
M1M 2
z2
mg dz m g ( z2 z1 )
z1
Как видно, сила тяжести – потенциальная сила. Ее работа не зависит от траектории
точки, а определяется перепадом высот h z2 z1 между начальным и конечным
положениями точки. Таким образом,
A mg mg h
(7.12)
Знак "+" берётся тогда, когда точка теряет высоту (опускается); знак "-" соответствует
подъему точки.
Работа упругой силы
Понятие упругой силы обычно ассоциируется с реакцией
линейно–упругой пружины. Направим ось x вдоль пружины
в сторону ее растяжения. Под s x lo понимаем удлинение
пружины ( lo – длина нерастянутой пружины).
Сила реакции пружины пропорциональна ее удлинению
Fx c s где c – коэффициент жесткости пружины.
Разложим вектор скорости точки M на две составляющие,
40
одна из которых V1 направлена вдоль пружины и определяет скорость ее растяжения, а
вторая V2 перпендикулярна пружине и определяет скорость точки M , полученную при
повороте пружины без изменения ее длины (Рис.7.3).
N F V Fx v1 c
Вычислим мощность упругой силы:
s ds
dt
Работа упругой силы при перемещении конца пружины из M 1 в M 2 оказывается равной
s2
AM1M 2 c s ds
s1
c 2 2
s2 s1
2
(7.13)
Как видно, упругая сила потенциальна. Заметим, что если поворачивать пружину вокруг
шарнира O , не изменяя ее длины, то упругая сила не совершает работу.
Работа вращающего момента
Пусть сила F приложена в некоторой точке
тела, имеющего ось вращения. Точка приложения
силы описывает окружность. Разложим силу на
составляющие
по
осям
естественного
трехгранника (Рис.7.4):
F F Fn Fb .
Работу будет совершать только составляющая
F , направленная по касательной к траектории
точки M :
N F V F v F h M z F
t2
t2
2
t1
t1
1
AM1M 2 N dt M z dt M z d
(7.14)
где M z – момент силы F относительно оси вращения тела.
7.4.
Теорема об изменении кинетической энергии механической системы
Теорема об изменении кинетической энергии относится к числу общих теорем динамики
наряду с доказанными ранее теоремами об изменении количества движения и изменении
момента количества движения.
Умножим каждое из дифференциальных уравнений движения точек механической
системы (3.1) скалярно на скорость соответствующей точки и сложим все полученные
уравнения:
n
mk Vk
k 1
n
n
n
dVk
Fke Vk F ik V k Fki Vk
dt
k 1
k 1
k 1
или
n
d mk vk2 n e
i
F
V
k k Fk Vk .
dt
2 k 1
k 1
41
Учитывая определения кинетической энергии механической системы (7.1) и мощности
силы (7.6), получаем:
n
n
dT
N ke N ki .
dt k 1
k 1
(7.15)
Доказана теорема об изменении кинетической энергии механической системы в
дифференциальной форме:
производная по времени от кинетической энергии механической системы
равна сумме мощностей всех приложенных к системе внешних и внутренних
сил.
Умножая равенство (7.15) на dt и учитывая определение элементарной работы силы
(7.7), получаем:
n
n
k 1
k 1
dT d Ake d Aki
(7.16)
т.е.
дифференциал кинетической энергии механической системы равен сумме
элементарных работ всех приложенных к системе внешних и внутренних
сил.
Для практических целей удобна интегральная форма записи теоремы об изменении
кинетической энергии, которая получается путем интегрирования равенства (7.16) на
некотором перемещении системы:
n
n
T To A Aki ,
k 1
e
k
(7.17)
k 1
т.е.
изменение кинетической энергии механической системы при некотором ее
перемещении равно сумме работ всех приложенных к системе внешних и
внутренних сил, совершенных на этом перемещении.
Если все приложенные к механической системе внешние и внутренние силы
потенциальны
n
Fke drk dU e
k 1
n
F dr dU
k 1
i
k
i
k
механическая система называется консервативной. Для консервативной механической
системы равенство (84) принимает вид:
dT dU e dU i
Отсюда:
E T U e U i const
где E – полная механическая энергия системы; U e – потенциальная энергия внешнего
силового поля; U i – потенциальная энергия внутренних сил (внутренняя энергия системы).
Таким образам,
если все внешние и все внутренние силы, действующие на механическую
систему, потенциальны, полная механическая энергия системы сохраняется
(постоянна).
42
7.5.
Работа внутренних сил
Заметим, что в отличие от первых двух общих теорем динамики в теорему об изменении
кинетической энергии в общем случае входят внутренние силы.
Особый случай представляет геометрически неизменяемая механическая система, в
частности, абсолютно твердое тело. Скорости двух любых точек M i и M j геометрически
неизменяемой механической системы связаны соотношением (6.14):
V j Vi V j i ,
причём
Vj i Mi M j .
Эти две точки взаимодействуют с силами равными по модулю и направленными по одной
прямой в противоположные стороны:
Fiji Fjii .
Заметим, что для механической системы эти силы являются внутренними.
Вычислим суммарную мощность этих двух сил:
Nij Fiji Vi Fjii V j Fiji V j i 0,
тк
Fiji V j i .
Таким образом,
суммарная мощность, а следовательно, и суммарная работа всех внутренних
сил геометрически неизменяемой механической системы равна нулю при
любых ее перемещениях.
Для геометрически неизменяемой механической системы теорема об изменении
кинетической энергии является прямым следствием теоремы об изменении количества
движения и теоремы об изменении кинетического момента. Тем не менее, ее использование
часто оказывается удобным, особенно в тех случаях, когда необходимо определить
зависимость каких-либо скоростей от перемещения, совершенного системой. Для
геометрически изменяемой механической системы теорема об изменении кинетической
энергии носит независимый характер.
ЛЕКЦИЯ 8
Основная идея, положенная в основу подхода к решению задач в аналитической
механике, состоит в том, чтобы разделить задачу определения закона движения
механической системы и задачу определения неизвестных реакций связей. Для этого
необходимо получить дифференциальные уравнения движения механической системы в
виде, не содержащем реакций связей.
8.1.
Классификация связей
Механическая система называется свободной, если ее точки могут занимать любые
положения в пространстве, а их скорости могут принимать любые значения. В противном
случае система называется несвободной. Очевидно, для несвободной системы должны быть
заданы ограничения, налагаемые на координаты и скорости точек системы. Эти ограничения
называют связями. Они могут быть записаны в виде уравнений или неравенств,
связывающих время, координаты и скорости точек системы. Конструктивно связи
реализуются в виде шарниров, поверхностей, стержней, нитей и т.п.
43
Если механическая система может покинуть связь, то такая связь называется
неудерживающей; в противном случае – удерживающей. На Рис.8.1 изображен шарик,
привязанный к концу нерастяжимой нити, Такой шарик при натянутой нити движется по
сфере радиуса r , но может уйти и внутрь этой сферы. При этом нить не натянута (как- бы
отсутствует). Это пример неудерживающей связи в отличие от случая, изображенного на
Рис.8.2, где такой же шарик находится на конце нерастяжимого стержня. Удерживающие
связи записываются в виде уравнений, а неудерживающие — в виде неравенств,
связывающих координаты точек системы.
Рис. 8.1
Рис. 8.2
Рис. 8.3
Рассмотренные в этих двух примерах связи являются стационарными, в отличие от
случая, изображенного на Рис.8.3, где в качестве опоры используется телескопический
стержень, длина которого может изменяться со временем. Итак, если вид связи не
изменяется со временем, связь называется стационарной; в противном случае –
нестационарной. В уравнения (неравенства) стационарных связей время не входит явным
образом.
Связи могут налагать ограничения не только на координаты точек, но и на их скорости.
Например, при качении без проскальзывания колеса по неподвижной поверхности (Рис.8.4)
ограничения, налагаемые связью (поверхность) могут быть выражены уравнениями:
vc r
yc r
Хотя второе из этих уравнений носит относительно координат дифференциальный характер,
оно может быть проинтегрировано
xc
t
0
0
dx r dt r d
c
0
и заменено алгебраическим соотношением xc r
Рис. 8.4
Рис. 8.5
44
Рассмотрим другой пример. Конек AB скользит по ледяной поверхности, принятой за
координатную плоскость xy (Рис.8.5). Конек имеет выпуклое лезвие, которое касается льда
только в одной точке C . Положение конька задается двумя координатами точки C и углом
. Конек затачивается таким образом, чтобы отсутствовало поперечное проскальзывание в
направлении, перпендикулярном AB . Иначе говоря, скорость точки касания C должна быть
направлена вдоль конька, т.е.
vcy
vcx
tg ;
dxc sin dyc cos 0
Это уравнение связи (в отличие от предыдущего примера) нельзя проинтегрировать, не зная
законов движения конька xc (t ) yc (t ) (t )
Связи называются голономными, если их уравнения могут быть записаны в
виде, не содержащем производных от координат по времени или
дифференциалов координат.
Связи называются неголономными, если их уравнения содержат
неинтегрируемым образом производные от координат по времени или
дифференциалы координат.
В дальнейшем будем рассматривать только голономные удерживающие стационарные и
нестационарные связи. Изучение неголономных систем представляет значительные
трудности и не входит в число вопросов, излагаемых в данном курсе. Если же на систему
наложены неудерживающие связи, то решение задачи можно разбить на ряд временных
интервалов, на одних из которых связь действует как удерживающая (на Рис.8.2 нить
натянута), а на других как бы отсутствует (нить не натянута).
8.2.
Возможные скорости и возможные перемещения
Понятия возможной скорости и возможного перемещения введем сначала для
материальной точки, на которую наложена голономная удерживающая связь.
Возможной скоростью материальной точки V называется любая скорость,
которую может иметь несвободная материальная точка, не нарушая
наложенных на нее в данный момент времени связей.
Заметим, что возможная скорость не реализуется как следствие действия приложенных к
точке сил. Это – мыслимый набор скоростей, обладая которыми в данном положении M o ,
точка не покинет поверхность связи при условии, что сама поверхность не движется и не
деформируется, т.е. при фиксированном времени.
Рис. 8.6
Рис. 8.7
45
Если связь нестационарная, то среди возможных скоростей нет ни одной, которая
совпадала бы с действительной скоростью. Если же связь стационарная, то среди возможных
скоростей найдется такая, которая совпадает в данный момент времени с действительной
скоростью.
Проиллюстрируем сказанное на простых примерах. Пусть на точку M наложена
удерживающая стационарная связь в виде стержня, шарнирно закрепленного на другом
конце (Рис.8.6). Такая точка может двигаться только по сфере, по касательной к которой и
направлена действительная скорость. Если фиксировать время и посмотреть, какие скорости
может иметь точка, не отрываясь от стержня, оказывается, что эти скорости могут быть
направлены только по касательной к той же сфере.
Другой пример. Пусть стержень телескопический (Рис.8.7); его длина изменяется по
заданному закону r (t ) . Такая связь будет удерживающей и нестационарной. К скорости
точки M , полученной при повороте стержня, добавляется скорость, полученная точкой при
выдвижении поршня. Траекторией точки M может быть любая кривая. Если же мы
фиксируем время, т.е. мысленно остановим выдвижение стержня, то из занимаемого
положения точка может двигаться только по сфере радиуса r (t1 ) . При этом не найдется ни
одной возможной скорости, которая совпала бы с действительной.
Возможным перемещением материальной точки r называется любое
бесконечно малое перемещение, которое может иметь несвободная
материальная точка, не нарушая наложенных на нее в данный момент
времени связей.
Действительное
соотношением
перемещение
и
действительная
скорость
связаны
известным
dr Vdt
Возможное перемещение пропорционально возможной скорости
r V
Знак "" означает операцию варьирования. Техника варьирования такая же, как техника
дифференцирования, но при вычислении вариации функции время не варьируется (считается
постоянным – фиксированным).
Возможным перемещением механической системы называется множество возможных
перемещений всех ее точек.
8.3.
Идеальные связи
Связи, наложенные на механическую систему, называются идеальными, если сумма
работ всех реакций связей на любом возможном перемещении системы равна нулю:
n
N r 0
k 1
k
k
(8.1)
Учитывая важность понятия идеальной связи, рассмотрим часто встречающиеся случаи.
1. Пусть опорой для тела служит некоторая поверхность, по которой тело может
скользить (Рис.8.8). В общем случае реакция поверхности R имеет две составляющие —
нормальную N и касательную F , которая называется силой трения. При любом
возможном перемещении тела возможная работа реакции отлична от нуля за счет работы
силы трения:
46
A R r N r F r F r 0
Если же поверхность идеальная, то сила трения отсутствует и
A R r N r 0
Особый случай составляет качение без проскальзывания колеса по поверхности. Сила
реакции снова имеет две составляющие N и F . Помимо этих составляющих возможно
возникновение момента трения качения M (Рис.8.9). При любом возможном перемещении
колеса скорость точки приложения сил N и F равна нулю и, следовательно, возможная
работа этих сил равна нулю. Однако, момент трения качения может совершить работу при
возможном повороте колеса. Если же колесо и опорная поверхность считаются абсолютно
твердыми и M 0 , то такая связь будет идеальной.
Рис. 8.8
Рис. 8.9
2. Рассмотрим две материальные точки A и B , связанные невесомым деформируемым
стержнем (или пружиной) (Рис.8.10). В соответствии с третьим законом Ньютона RA RB .
По теореме сложения скоростей при сложном движении точки
VB VBe VBr VA VBr1 VBr2
где VBr1 и VBr2 – составляющие возможной относительной скорости, направленные вдоль
отрезка AB и перпендикулярно ему соответственно.
Для возможной суммарной мощности сил реакций получаем:
N RA VA RB VB RA VA RA VA VBr1 VBr2 RA VBr1 RA VBr1
Если стержень AB недеформируемый VB1 0 , то суммарная возможная работа реакций
равна нулю и связь будет идеальной. Такая связь реализуется в абсолютно твердом теле.
Если же возможна деформация стержня, рассмотренная связь не будет идеальной,
поскольку возможная работа реакций при растяжении - сжатии стержня будет отлична от
нуля
.
Рис. 8.10
Рис. 8.11
47
3. Неподвижный шарнир может рассматриваться как идеальная связь, если трением в
шарнире можно пренебречь (Рис.8.11). В этом случае. поскольку точка приложения реакции
шарнира неподвижна. возможная работа реакции шарнира равна нулю. Если же трение в
шарнире необходимо учитывать, то связь не будет идеальной, так как при возможном
повороте тела вокруг шарнира будет совершать работу момент сил трения.
8.4. Принцип возможных перемещений
Принцип возможных перемещений устанавливает условия равновесия механических
систем. Под равновесием механической системы традиционно понимают состояние ее покоя
по отношению к выбранной инерциальной системе отсчета.
Рассмотрим механическую систему, состоящую из n материальных точек. Для ее
равновесия необходимо и достаточно, чтобы суммы всех сил, действующих на каждую точку
системы, и скорости всех точек в начальный момент времени равнялись нулю:
Vk 0 0
Fk Nk 0
k 1 2… n
(8.2)
где
Fk – равнодействующая всех активных сил, действующих на точку с номером k ;
N k – равнодействующая всех сил реакций связей, наложенных на точку с номером k , как
внешних, так и внутренних.
Для равновесия механической системы с идеальными удерживающими
стационарными связями необходимо и достаточно, чтобы сумма
элементарных работ всех приложенных к системе активных сил на любом
возможном перемещении системы равнялась нулю и скорости всех точек в
начальный момент времени равнялись нулю:
n
F r 0
k 1
k
Vk 0 0
k
k 1 2… n
(8.3)
Сформулированное утверждение называют принципом возможных перемещений. Его
действительно можно использовать как принцип, т.е. принять без доказательства, однако,
при изложении данного курса в качестве аксиом приняты законы Ньютона и, следовательно,
доказательство необходимо.
Необходимость. Пусть механическая система находится в равновесии. Следовательно,
выполняются условия (8.3). Из данного положения дадим системе возможное перемещение.
Умножим каждое из уравнений (8.3) скалярно на соответствующее точке возможное
перемещение r k и сложим все полученные уравнения:
n
n
F r N r 0
k 1
k
k
k 1
k
k
(8.4)
По условию связи идеальные, следовательно, справедливо равенство (8.1). Из (8.1) и (8.4)
получаем (8.3).
Достаточность. Приложим к точкам покоящейся механической системы систему сил,
удовлетворяющих равенству (8.3) и, следовательно, поскольку связи идеальные (8.4),
равенству
F N r 0
n
k 1
k
k
k
(8.5)
48
Покажем, что механическая система останется в покое. Допустим противное – система под
действием приложенных сил пришла в движение, т.е. её точки получили ускорения Wk . Эти
ускорения должны быть направлены по касательным к траекториям точек, поскольку
начальные скорости равны нулю и нормальные составляющие ускорений отсутствуют.
Таким образом, действительные перемещения точек пропорциональны их ускорениям. По
условию связи стационарные и, следовательно, среди возможных перемещений системы
найдётся такое, которое совпадает с действительным. Возьмём в качестве возможного
перемещения систему векторов, пропорциональных ускорениям точек rk koWk . Равенство
(8.5) примет вид:
n
ko Fk N k Wk 0
k 1
или, учитывая, что для каждой точки справедлив второй закон Ньютона,
n
ko mk wk2 0
k 1
Это равенство может иметь место только в том случае, если ускорения всех точек равны
нулю wk 0 Следовательно, механическая система после приложения активных сил
останется в покое.
Заметим, что если вместо возможных перемещений использовать пропорциональные им
возможные скорости (что позволяет в полной мере использовать при решении задач
кинематические методы), то условия равновесия записываются в виде:
n
F V 0
k 1
k
k
Vk 0 0
k 1 2… n
(8.6)
т.е.
для равновесия механической системы с идеальными, удерживающими,
стационарными связями необходимо и достаточно, чтобы сумма мощностей
всех приложенных к системе активных сил при любых возможных скоростях
ее точек равнялась нулю и скорости всех точек в начальный момент времени
равнялись нулю.
Принцип возможных перемещений позволяет не только исследовать условия равновесия
различных механизмов, но и является мощным средством выборочного определения реакций
идеальных связей. Для определения реакции какой–либо связи необходимо эту связь
отбросить, а ее реакцию включить в число активных сил.
Принцип возможных перемещений применяется и при наличии неидеальных связей,
реакция которых (например, сила трения) включается в число активных сил.
ЛЕКЦИЯ 9
9.1.
Обобщенные координаты и обобщенные силы
Рассмотрим механическую систему, состоящую из n материальных точек, на которую
наложено s голономных идеальных удерживающих связей. Среди 3n координат точек
системы независимых будет только 3n s координат. Остальные определяются через
независимые при помощи уравнений связей.
Любой набор параметров, определяющих положение механической системы, называются
ее обобщенными координатами:
49
q1 q2 ..., q
Для голономных систем число независимых обобщенных координат совпадает с числом
степеней свободы механической системы. Заметим, что обобщенные координаты могут
иметь различный геометрический или механический смысл. Ими могут быть линейные и
угловые величины, а также параметры, имеющие размерность площади, объема и т.п.
Сумма работ всех приложенных к системе активных сил на ее возможном перемещении
называется возможной работой. Возможная работа может быть вычислена как через
возможные перемещения точек приложения сил, так и через вариации обобщенных
координат
n
k 1
j 1
A Fk rk Q j q j
(9.1)
Множитель Q j при вариации обобщенной координаты q j в выражении для возможной
работы активных сил системы называется обобщенной силой, соответствующей обобщенной
координате q j .
Можно предложить несколько способов вычисления обобщенных сил. Остановимся на
одном из этих способов, который можно использовать при решении практически любых
задач.
Используем то обстоятельство, что обобщенные координаты, а следовательно, и
вариации обобщенных координат не зависят друг от друга. Для вычисления какой–либо
обобщенной силы, например Q j , дадим системе такое возможное перемещение, при котором
все вариации обобщенных координат, кроме q j , равны нулю. Тогда возможная работа всех
активных сил определится по формуле:
j A Q j q j
(9.2)
9.2.
Уравнения Лагранжа 2–го рода
При решении задач с использованием общих теорем динамики, как правило, приходится
иметь дело с системой дифференциальных уравнений, содержащей не только реакции
внешних связей, наложенных на механическую систему, но и силы взаимодействия между
отдельными телами этой системы. Для сравнительно простых механических систем такой
подход вполне оправдан, однако, в более сложных случаях использование общих теорем
динамики приводит, как правило, к относительно сложным преобразованиям, особенно в тех
случаях, когда механическая система имеет несколько степеней свободы.
Для голономных механических систем эффективным способом решения задачи
определения законов движения является использование уравнений Лагранжа 2–го рода, в
которых основные трудности преобразований преодолеваются уже в общем виде. Эти
уравнения выводятся непосредственно из системы дифференциальных уравнений движения
точек механической системы (4.1) и представляют собой форму записи этих уравнений в
обобщенных координатах. Уравнения Лагранжа 2–го рода имеют вид (без вывода):
d T T
Qj
dt q j q j
где
T – кинетическая энергия системы;
q j – обобщенная координата;
q j – обобщенная скорость;
j 1 2…
(9.3)
50
Q j – обобщенная сила;
– число степеней свободы системы.
Эти уравнения не содержат не только силы внутренних взаимодействий, но и реакций
идеальных связей, наложенных на механическую систему. Число уравнений Лагранжа 2–го
рода равно числу степеней свободы механической системы.
Пример 1
Каток массы m1 радиуса r может перекатываться без скольжения по
горизонтальной плоскости. К оси катка привязана нерастяжимая нить длиной a ,
на конце которой закреплен шарик массы m2 (Рис.9.1). Составить
дифференциальные уравнения малых колебаний системы. Каток считать
сплошным однородным цилиндром. Сопротивлением качения пренебречь.
Система имеет две степени свободы. В качестве обобщенных координат примем
координату x оси катка и угол отклонения нити от вертикали . Вычислим кинетическую
энергию системы:
m1v12 J112 m2v22
T
2
2
2
Каток катится без проскальзывания, следовательно,
v
r
x
r
1 1
Учитывая, что
xM x a sin
yM r a cos
вычисляем проекции скорости точки M на оси координат:
v2 x xM x a cos
v2 y yM a sin
Тогда
v12 x 2
v22 v22x v22y x 2 2a cos x a 2 2
Полагая для определенности m1 6m m2 m ,
получаем кинетическую энергию системы:
T 5mx 2 max cos
m 2 2
a
2
Вычислим частные производные по обобщенным
скоростям:
T
10mx ma cos
x
T
max cos ma 2
Вычислим частные производные по обобщенным
координатам:
51
T
0
x
T
max sin
Для вычисления обобщенных сил используем формулы (9.2):
пусть x 0 0 тогда x A 0
отсюда:
Qx 0
пусть x 0 0 тогда A mga sin
отсюда: Q mga sin
Уравнения Лагранжа принимают вид:
d T T
Qx
dt x x
10 x a cos a 2 sin 0
d T T
Q
dx
x cos a g sin 0
По условию колебания малые, т.е.
высокого порядка
(a 2
0)
sin
получаем:
10 x a 0
и
cos 1 Пренебрегая малыми более
x a g 0
Пример 2
Призма (тело 1) массы m1 может скользить
по идеально гладкой горизонтальной
поверхности.
В
вершине
призмы
закреплена ось барабана лебедки (тело 2).
Конец троса прикреплен к оси катка (тело
3), который катится без проскальзывания
по боковой поверхности призмы (Рис.140).
Барабан лебедки и каток — сплошные
однородные цилиндры одинаковой массы
m2 m3 m и одинакового радиуса r2 r3 r . К барабану лебедки приложен
постоянный вращающий момент M . Получить дифференциальные уравнения
движения системы.
Система имеет две степени свободы. В качестве обобщенных координат примем
координату x призмы и относительную координату оси катка s . Вычислим кинетическую
энергию системы:
m1v 2 m2v 2 J 222 J 332 m3
2
2
T
v u cos u sin
2
2
2
2
2
Учитывая, что
u
mr 2
v x u s 2 3 J 2 J 3
r
2
получаем:
52
T
m1 2m 2
x mxs cos ms 2
2
Для вычисления обобщенных сил используем формулы (9.2):
Пусть x 0 s 0 тогда x A 0 отсюда
Qx 0.
Пусть x 0 s 0
тогда
s
r
M
s A M mgs sin s mgs sin s
r
отсюда
Qs
M
mgs sin
r
Уравнения Лагранжа принимают вид:
d T T
Qx
dt x x
d T T
Qs
dt s s
ms cos (m1 2m) x 0
2ms mx cos
M
mgs sin
r