Федеральное агентство воздушного транспорта (Росавиация)
ФГБОУ ВО «Санкт-Петербургский государственный
университет гражданской авиации»
С. В. Григорьев
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ
РАДИОНАВИГАЦИИ И РАДИОЛОКАЦИИ
Часть 1
Методы радионавигационных определений
Учебное пособие
y
4
ξ
γ
α
5
z
V
W
φ0
3
φ0
1
x
θ
θ
z′
2
Санкт-Петербург
2018
x׳
1
Федеральное агентство воздушного транспорта (Росавиация)
ФГБОУ ВО «Санкт-Петербургский государственный
университет гражданской авиации»
С. В. Григорьев
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ
РАДИОНАВИГАЦИИ И РАДИОЛОКАЦИИ
Часть 1
Методы радионавигационных определений
Учебное пособие
Допущено УМО по образованию в области аэронавигации
в качестве учебного пособия для студентов высших учебных заведений,
обучающихся по направлению подготовки «Аэронавигация» и
специальностям высшего образования «Эксплуатация воздушных судов и организация
воздушного движения», «Летная эксплуатация воздушных судов» и «Аэронавигационное
обслуживание и использование воздушного пространства»
Санкт-Петербург
2018
Григорьев С. В. Теоретические основы радионавигации и радиолокации. Ч. 1.
Методы радионавигационных определений: Уч. пособие/ СПб ГУГА. СПб, 2018. 279 с.
Написано в соответствии с программами дисциплин «Теоретические основы
радионавигации и радиолокации» и «Радиотехнические системы навигации и посадки
воздушных судов».
Изложены основные методы определения координат, нашедшие применение для
осуществления полетов воздушных судов; показаны преимущества и ограничения в их
использовании; особое внимание уделено вопросам точности радионавигационных
определений при использовании дальномерных, угломерных, угломерно-дальномерных и
разностно-дальномерных систем.
Рассматриваются методы измерения навигационных параметров, основанные на
взаимосвязи искомых навигационных параметров и измеряемых параметров сигналов.
Теоретические методы определения местоположения иллюстрируются примерами их
практической реализации в авиационных радионавигационных и радиолокационных
системах, в том числе спутниковых.
Учебное пособие предназначено для студентов высших учебных заведений,
обучающихся по направлению подготовки «Аэронавигация» и специальностям высшего
образования «Эксплуатация воздушных судов и организация воздушного движения»,
«Лётная эксплуатация воздушных судов» и «Аэронавигационное обслуживание и
использование воздушного пространства».
Ил. 140, табл. 4, библ. 22 назв.
Рецензенты:
В.А. Сарычев, д-р техн. наук, проф., Заместитель Генерального конструктора
по радиолокации и радиофизике АО «НПП Радар ммс»
Н.Н. Сухих, д-р техн. наук, проф., Первый проректор – проректор по учебной работе
С-Петербургского государственного университета гражданской авиации
ISBN 978-5-6041020-7-7
© Санкт-Петербургский государственный
университет гражданской авиации, 2018
© Григорьев С.В.
3
Оглавление
Введение …………………………..…………………………………………………………...
1. Определение местоположения ………………………………………………………….
1.1. Методы радионавигационных определений ………………………………………… .
1.1.1. Счисление пути ………………………………………………………………………..
1.1.2. Позиционный метод …………………………………………………………………..
1.1.3. Обзорно-сравнительный (корреляционно-экстремальный) метод………………….
1.1.4. Определение координат в спутниковых системах навигации ……………………..
1.1.4.1. Квазидальномерный метод определения координат……………………………….
1.1.4.2. Разностно-дальномерный метод определения координат …………………………
1.2. Точность определения местоположения ………………………………………………..
1.2.1. Эллипс ошибок ……………………………………………………………………….. ..
1.2.2. Градиент линий положения ………………………………………………………….. .
1.2.3. Геометрический фактор ………………………………………………………………..
1.2.4. Рабочие зоны радионавигационных систем …………………………………………
1.2.4.1. Дальномерные системы ………………………………………………………………
1.2.4.2. Угломерные системы ………………………………………………………………..
1.2.4.3. Угломерно-дальномерные системы ………………………………………………..
1.2.4.4. Разностно-дальномерные системы ………………………………………………….
2. Методы измерения навигационных параметров …………………………………...
2.1. Измерение расстояний ……………………………………………………………….. …
2.1.1. Временной (импульсный) метод …………………………………………………….. .
2.1.1.1. Запросный метод ……………………………………………………………….. ……
2.1.1.2. Беззапросный метод ……………………………………………………………. ……
2.1.2. Частотный метод ……………………………………………………………………….
2.1.3. Фазовый метод …………………………………………………………………………
2.2. Измерение разности расстояний ……………………………………………………... ...
2.2.1. Временной (импульсный) метод ……………………………………………………...
2.2.2. Фазовый метод ………………………………………………………………………….
2.2.2.1. Фазовая разностно-дальномерная система с частотным разделением каналов . ..
2.2.2.2. Фазовая разностно-дальномерная система с временным разделением каналов …
2.2.3. Импульсно-фазовый метод …………………………………………………………….
2.3. Многопозиционный метод определения координат …………………………………...
2.4. Дифференциальный метод повышения точности измерений …………………………
2.5. Измерение скорости ………………………………………………………………………
2.5.1. Эффект Доплера ………………………………………………………………………..
2.5.2. Доплеровские измерители скорости …………………………………………………..
2.5.3. Спектр доплеровских частот …………………………………………………………..
2.6. Методы измерения направлений ……………………………………………………….
2.6.1. Амплитудные методы определения направления ……………………………………
2.6.1.1. Метод максимума ……………………………………………………………………
2.6.1.2. Метод минимума ……………………………………………………………………..
2.6.1.3. Радиопеленгаторы, реализующие метод минимума ……………………………….
2.6.1.4. Метод сравнения (равносигнальный) ……………………………………………….
2.6.1.5. Радиомаячная системы посадки, задающая направление равносигнальным
методом ……………………………………………………………………………………….
2.6.1.6. Радиомаячная система посадки повышенной точности ……………………………
2.6.1.7. Уменьшение влияния переотражений волн на точность задания траектории
посадки. Двухканальные радиомаяки.......................................................................................
2.6.1.8. Амплитудный моноимпульсный радиолокатор ……………………………………
2.6.2. Фазовые методы определения направления ………………………………………….
5
8
13
13
16
23
30
30
35
37
38
45
48
56
57
62
70
73
90
91
92
92
97
99
106
110
112
116
119
122
127
134
146
154
154
157
173
181
184
184
189
192
198
200
208
213
221
226
4
2.6.2.1. Наземный радиопеленгатор с измерением на высокой частоте……………………
2.6.2.2. Наземный радиопеленгатор с амплитудной индикацией ………………………….
2.6.2.3. Автоматический радиокомпас фазового типа ………………………………………
2.6.2.4. Фазовый моноимпульсный радиолокатор …………………………………………..
2.6.2.5. Амплитудно-фазовый всенаправленный ОВЧ-радиомаяк ………………………...
2.6.3. Доплеровский метод определения направления ……………………………………..
2.6.3.1. Доплеровский радиопеленгатор …………………………………………………….
2.6.3.2. Доплеровский всенаправленный радиомаяк DVOR ……………………………….
2.6.4. Комбинированные методы определения направления ………………………………
2.6.4.1. Микроволновая система посадки, реализующая амплитудно-временной метод
измерения углов ……………………………………………………………………………….
2.6.4.2. Амплитудно-доплеровский метод измерения угла сноса ………………………….
Литература ……………………………………………………………………………………
228
233
236
240
244
250
254
257
263
263
268
277
5
ВВЕДЕНИЕ
Безопасное выполнение полетов авиации в современных условиях,
характеризующихся большими скоростями и дальностями полетов и высокой
интенсивностью
воздушного
движения,
невозможно
без
организации
и
эксплуатации средств радиотехнического обеспечения, составными частями
которого являются радионавигационные и радиолокационные системы.
Радионавигация – область радиотехники, изучающая методы создания и
применения
навигационных
средств,
использующих
закономерности
распространения радиоволн для обеспечения подвижных объектов информацией
об их местоположении.
Радиолокация – область радиотехники, предметом которой является поиск и
обнаружение в пространстве различных объектов, а также определение их
координат и параметров движения с использованием радиоволн.
Таким образом, общей задачей этих дисциплин является определение
местоположения подвижных объектов и параметров их движения в некоторой
системе координат, выбор которой зависит от решаемой задачи и используемого
метода измерений.
При этом если для радиолокации основной решаемой задачей является
обнаружение объекта, а затем обязательно измеряются его координаты, то для
радионавигации определение координат является основной задачей.
В настоящее время разработано и используется большое количество
различных методов определения координат, каждый из которых имеет свои
достоинства и недостатки, определяющие область его применения. Поэтому для
правильного выбора метода решения навигационных задач и грамотной
эксплуатации соответствующих наземных и бортовых средств радиотехнического
обеспечения полетов требуется знание теоретических основ их построения и
функционирования.
Рассмотрению методов радионавигационных определений и посвящена
первая часть данного учебного пособия. В ней приводятся основные методы
6
определения координат (счисление пути, обзорно-сравнительный и позиционный
методы), которые применяются для осуществления полетов воздушных судов;
показаны их преимущества и ограничения в использовании; особое внимание
уделяется
вопросам
использовании
точности
дальномерных,
радионавигационных
угломерных,
определений
угломерно-дальномерных
при
и
разностно-дальномерных систем.
Определение местоположения воздушного судна предполагает измерение
некоторых навигационных
параметров (расстояния, разности
расстояний,
направления, скорости полета), в то время как радиотехнические системы
позволяют измерять только параметры используемых радиосигналов. Поэтому
необходимо знать взаимосвязь измеряемых параметров радиосигнала и искомого
навигационного параметра полета. Такая взаимосвязь и методы измерения
навигационных параметров также рассматриваются в первой части учебного
пособия.
Теоретические методы определения местоположения иллюстрируются
примерами их практической реализации в авиационных радионавигационных и
радиолокационных системах, в том числе спутниковых, внедрение которых
обеспечивает получение значительного эффекта технического, безопастностного
и экономического характера [5].
Так как радионавигация и радиолокация являются разделами радиотехники,
то для их изучения и понимания необходимо знание физических основ
использования радиоволн и радиосигналов для координатных измерений.
Рассмотрению этих вопросов посвящена вторая часть учебного пособия.
В ней уделено внимание основам теории распространения радиоволн и их
отражения, методам создания в пространстве направленных излучений и приема
радиоволн, генерации и обработки простых и сложных радиосигналов для
обнаружения, разрешения и оценки их параметров в условиях воздействия шумов
и помех, а также методам борьбы с помехами.
Данное учебное пособие предназначено для студентов авиационных
учебных заведений, обучающихся по направлению подготовки «Аэронавигация»
7
и специальностям высшего образования «Эксплуатация воздушных судов и
организация воздушного движения», «Летная эксплуатация воздушных судов» и
«Аэронавигационное обслуживание и использование воздушного пространства»
при
изучении
дисциплин
«Теоретические
основы
радионавигации
радиолокации» и «Информационные основы автоматизированных
и
систем
управления воздушным движением», а также будет полезно при изучении
дисциплин «Радиотехнические системы навигации и посадки воздушных судов»,
«Радиоэлектронные средства наблюдения» и «Организация радиотехнического
обеспечения полетов воздушных судов».
8
1. ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ
Задача определения местоположения объекта (обсервация) заключается в
нахождении его координат в некоторой системе координат. Таковых систем
координат, используемых в радионавигации, может быть достаточно много. Вид
системы координат зависит в первую очередь от сущности применяемого
метода и условий определения местоположения. Рассмотрим некоторые из них.
Основной системой координат в радионавигации, позволяющей описывать
местоположение
объекта
в
любой
точке
поверхности,
воздушного
и
околоземного пространства Земли, является прямоугольная геоцентрическая
система координат XYZ (рис. 1.1).
В ней начало системы совпадает с центром масс Земли. Ось Z направлена
вдоль оси вращения Земли. Оси X и Y находятся в плоскости экватора, причем
ось X проходит через Гринвичский меридиан, а ось Y дополняет систему до
правой.
Гринвичский
меридиан
вращения
Ось
Z
z
ro
B
0
x
Y
y
L
Экватор
X
Рис. 1.1. Геоцентрическая прямоугольная и геосферическая
системы координат
9
В этой системе координат работают спутниковые системы навигации
ГЛОНАСС (Россия) и GPS (США).
Другой системой координат является географическая система, в которой
координаты точки жестко привязаны к поверхности Земли и задаются широтой,
долготой и высотой. Если форма Земли считается сферической, то получается
геосферическая система координат (рис. 1.1). Однако форма Земли не является
правильной сферой, а представляет собой геоид. Земной геоид является
неправильным геометрическим телом, и использовать его для расчетов
местоположения затруднительно. Поэтому геоид аппроксимируют эллипсоидом
и координаты на его поверхности называют геодезическими. В этой системе
строятся карты поверхности Земли, применяемые в радионавигации.
Замена эллипсоида сферой приводит к появлению ошибок, величина
которых не превышает ±0,5 % в определении расстояния и +12' – в определении
углов.
В России земной геоид аппроксимируется эллипсоидом Красовского,
имеющим большую полуось aКр = 6 378 245 м и сжатие αКр = 1/298,3.
Мировая геодезическая система (МГС) базируется на эллипсоиде,
большая полуось которого aМГС = 6378137 м и сжатие αМГС =1/298,257223563.
Преобразование
прямоугольных
пространственных
координат
геодезические осуществляется по следующим формулам:
x =(N + H) cosB cosL;
y =(N + H) cosB sinL;
z =[(1-e2)N + H]sinB,
где x , y , z – прямоугольные координаты точки;
B , L , H – геодезические координаты точки (широта, долгота, высота);
N – радиус кривизны первого вертикала;
e – эксцентриситет эллипсоида.
a
N
2
2
1 e sin B
2
;
e = 2α – α2 ,
где а – большая полуось эллипсоида;
α – сжатие эллипсоида.
(1.1)
в
10
Несмотря на то, что ГЛОНАСС и GPS измеряют координаты одного и
того же потребителя в единой прямоугольной геоцентрической системе,
пересчет их в геодезические координаты в соответствии с (1.1) дает
несовпадающие результаты. Это вызвано различием параметров эллипсоидов,
используемых в этих спутниковых системах навигации.
Другой системой координат является ортодромическая сферическая
система, представляющая собой косую систему, в которой условный экватор
проходит через начальную и конечную точки полета на поверхности Земли.
Условный
экватор
(ортодромия)
представляет
собой
дугу
и
является
наикратчайшим расстоянием между двумя точками на сфере.
Существующая организация воздушного движения базируется на сети
воздушных
трасс,
проходящих
через
точки
размещения
наземных
радиотехнических систем (РТС) и являющихся промежуточными пунктами
маршрута (ППМ).
Координаты ВС при этом определяются в частно-ортодромической
системе
(рис. 1.2), начало которой находится в некотором промежуточном
пункте полета (ППМ i ), а конец – в следующем пункте (ППМ i+1 ).
S
СИ
ЛЗП
S0
ЗПУ
ППМ i+1
С′И С
И
0
ППМ i
δ
Z0
ФПУ
WS
Z
V
α
W
WZ
Рис. 1.2. Частно-ортодромическая система координат и метод счисления пути
в ней: ЗПУ – заданный путевой угол; ФПУ – фактический путевой угол
11
Эти пункты соединены частной ортодромией, которая, строго говоря,
является дугой окружности с радиусом Rзем + H, где Rзем – радиус Земли; H –
высота полета. Однако, длина частной ортодромии много меньше Rзем
поэтому,
можно
промежуточные
говорить
пункты.
о
прямолинейном
Следовательно,
участке,
можно
и,
соединяющем
рассматривать
частно-
ортодромическую систему как плоскую прямоугольную систему координат
SOZ , ось S которой совпадает с требуемым направлением полета, а ось Z
перпендикулярна ей.
Ориентация самой системы координат SOZ в пространстве определяется
некоторым
заданным
путевым
углом
(ЗПУ)
относительно
северного
направления, называемого еще углом карты (УК).
Система отсчета курсовых углов, принятая в воздушной навигации
показана на рис. 1.3.
Отсчет углов ведется от северного направления по часовой стрелке. При
этом различают северное направление:
истинное, направленное на географический северный полюс Земли;
магнитное, направленное на магнитный северный полюс Земли;
компасное, определяемое с помощью компаса.
В силу сферичности Земли направления на полюс в разных точках
поверхности не параллельны в пространстве, что учитывается углом схождения
меридианов δ. При удалении R воздушного судна от РНС не более 100 км
схождение меридианов можно не учитывать.
Из приведенных на рис. 1.3 навигационных параметров с помощью
радионавигационных систем (РНС) измеряются:
курсовой угол радиостанции (КУР), отсчет радиокомпаса (ОРК);
истинный пеленг радиостанции (ИПР), истинный пеленг самолета (ИПС);
угол сноса (УС);
путевая скорость (W);
расстояние до радиомаяка (R);
истинная
высота
радиовысотомером).
полета
(на
рисунке
не
указана,
измеряется
12
СК
СИ
СМ
СИ
ΔМ
ΔК
КК
V
НВ
МПУ
МК
ИК
ИПУ
КУВ
W
ИПР
U
УВ
УС КУР
ОРК
МПР
С′И
ΔР
СИ
R
δ
R
ИПР
ИПС
Обозначение курсовых углов:
МК – магнитный курс;
ИК – истинный курс;
МПУ – магнитный путевой угол;
ИПУ – истинный путевой угол;
МПР – магнитный пеленг радиостанции;
ИПР – истинный пеленг радиостанции;
КК – компасный курс;
ИПС – истинный пеленг самолета;
УС – угол сноса;
КУР – курсовой угол радиостанции;
УВ – угол ветра;
ОРК – отсчет радиокомпаса;
ΔР – радиодевиация;
КУВ – курсовой угол ветра;
ΔК – девиация компаса;
НВ – направление ветра;
ΔМ – магнитное склонение;
δ – схождение меридианов;
ИПР = МПР + ΔМ = МК + ΔМ + КУР = ИК + КУР
ИПУ = ИК + УС
МПК = МК + УС
УВ = НВ – ИПУ
КУВ = НВ – ИК = УВ + УС
W = VсosУС + UсosУВ
ИПС = ИПР ± 180° + δ
+180° , если ВС западнее РНТ
–180° , если ВС восточнее РНТ
Рис. 1.3. Система отсчета и обозначения курсовых углов
13
1.1. Методы радионавигационных определений
Для определения местоположения самолета в воздушной навигации
применяются следующие основные методы радионавигационных определений:
счисление пути;
позиционный;
обзорно-сравнительный (корреляционно-экстремальный).
В зависимости от сущности метода в каждом из них используется своя
система координат, в которой определяется место ВС.
1.1.1. Счисление пути
Координаты ВС определяются в частно-ортодромической системе
(рис.1.2), ось S которой совпадает с линией заданного пути (ЛЗП), а ось Z
перпендикулярна ей и показывает величину линейного бокового уклонения
(ЛБУ) самолета от ЛЗП [3].
Координаты воздушного судна в этой системе определяются путем
интегрирования в реальном времени составляющих по осям S и Z вектора
путевой скорости (рис. 1.2):
,
z (t ) Z W dt
s(t ) S0 Ws dt
0
(1.2)
z
где s(t), z(t) – текущие координаты ВС, пройденные вдоль и поперек ЛЗП;
S0 , Z0 – начальные координаты в момент начала счисления пути;
Ws , Wz – составляющие вектора путевой скорости вдоль и поперек ЛЗП.
Значение интеграла равно пути, пройденному за время интегрирования, то
есть является приращением координат. Для получения текущих координат в
частно-ортодромической системе необходимо знать начальные координаты S0 и
Z0 нахождения ВС в момент начала счисления пути (интегрирования).
Составляющие Ws, Wz вектора путевой скорости W при курсодоплеровском счислении определяются в виде (рис. 1.2.)
Ws = Wсos(ИК+УС–УК)= W сos(ФПУ–ЗПУ);
Wz = Wsin(ИК+УС–УК)= W sin(ФПУ– ЗПУ).
(1.3)
14
Величина путевой скорости и угол сноса при курсо-доплеровском
счислении измеряются с помощью доплеровского измерителя скорости и сноса
(ДИСС).
В случае отсутствия измеренной величины путевой скорости используется
курсо-воздушное счисление, основанное на информации о воздушной скорости
и скорости ветра (рис. 1.3):
Ws = Vсos(ИК–УК)+Uсos(НВ–УК) ;
Wz = Vsin(ИК–УК)+Usin(НВ–УК) .
(1.4)
Точность курсо-воздушного счисления ниже курсо-доплеровского из-за
низкой точности информации о ветре.
Возможно счисление координат и по информации инерциальной системы,
которая измеряет величины ускорений по осям самолета. Тогда координаты ВС
получаются путем двойного интегрирования по времени составляющих
ускорений движения вдоль и поперек ЛЗП.
Как видно из формул (1.3) и (1.4), для определения составляющих путевой
скорости Ws и Wz вычислителю требуется также угловая информация,
получаемая от курсовой системы самолета (ИК), доплеровского измерителя
(УС) или вводимая вручную (УК, НВ). Точность этой информации существенно
влияет на точность счисленных координат.
Погрешности измерения путевой скорости δW(t) и угла сноса δус(t)
являются
стационарными
случайными
функциями
времени,
характеризующимися корреляционными функциями
KW ( ) W2 exp W
K ус ( ) ус2 exp ус
;
,
где σW – среднеквадратическая погрешность измерения путевой скорости;
σус – среднеквадратическая погрешность измерения угла сноса;
αW – показатель затухания корреляционной функции по скорости;
αус – показатель затухания корреляционной функции по углу.
15
Параметры корреляционных функций погрешностей современных ДИСС
составляют:
-
-
σW =(0,1-0,4)% W ; σус =(0,2–0,4)°; αW = (0,03–0,05) с 1; αус =0,016 с 1.
Система
отношению
счисления
к
пути
первичным
является
случайным
нестационарной
погрешностям
за
системой
счет
по
наличия
интегрирующего звена.
Представив измеренное значение составляющей путевой скорости Ws
Ws(t)= W0s(t) + δWs(t) ,
(1.5)
где W0s(t) – истинное значение составляющей путевой скорости;
δWs(t) – случайная погрешность измерения путевой скорости,
получим в соответствии с (1.2):
s(t ) S0 W0 s t dt Ws t dt .
(1.6)
Значение первого интеграла дает истинное приращение пройденного пути
за время интегрирования, а второго – определяет случайную погрешность в
счислении за счет погрешности измерения составляющей скорости.
Заменив интегрирование на суммирование, получим для n-го момента
времени погрешность счисления
n
n t
s
W
s
i 1
Wsi
W
,
n
t
W
,
где τW – интервал корреляции погрешностей измерения скорости.
Тогда дисперсия определения счисленных координат
s2 t
n
i 1
2
Wsi
W2
1 Ws
t ,
4 ΔfW
(1.7)
где σWs – среднеквадратическая погрешность определения составляющей Ws ;
ΔfW – эффективная ширина спектра флуктуаций измеренной скорости.
Следовательно, интегрирование скоростей для определения координат
приводит к нарастанию погрешности счисленных координат со временем (1.7).
Аналогичное влияние оказывают на точность счисленных координат и
погрешности измерения углов.
16
Метод
счисления
пути
широко
используется
в
практике
самолетовождения.
К достоинствам метода относятся:
автономность;
определение текущих координат в реальном масштабе времени;
всепогодность.
Недостатком этого метода является нарастание погрешности счисленных
координат со временем (1.7). При этом скорость нарастания погрешности
определяется погрешностями измерения путевой скорости и углов.
Выражение (1.6) показывает, что погрешность измерения счисленных
координат равна нулю (каковы бы ни были погрешности измерения скорости) в
момент начала интегрирования.
Таким образом, ликвидация накопившихся при счислении погрешностей
возможна путем обнуления интегратора (установкой нового момента начала
счисления). Но при этом необходимо в выражение (1.2) вводить новые значения
начальных координат S0 и Z0 на момент обнуления интегратора и начала нового
цикла счисления. Новые значения начальных координат S0 и Z0 должны браться
от других независимых систем навигации.
Процесс обнуления интеграторов и ввод новых независимых начальных
координат называется коррекцией счисленных координат. Для ее реализации
используется информация от наземных РНС, реализующих позиционный метод
определения координат.
1.1.2. Позиционный метод
Позиционный метод основан на зависимости некоторого измеряемого в
процессе полета параметра от координат воздушного судна в соответствующей
системе координат.
Место ВС при позиционном методе определяется как точка пересечения
не менее трех поверхностей положения (в пространстве) или не менее двух
линий положения (на плоскости) [2].
17
Поверхность
положения
—
геометрическое место точек в пространстве,
характеризующееся
0
постоянством
H
навигационного параметра.
С
Линия положения образуется как линия
пересечения двух поверхностей положения.
r
φ
Обычно в качестве одной их поверхностей
β
положения используется поверхность Земли.
Линия
место
положения
точек
на
–
геометрическое
поверхности
характеризующееся
РHС
Земли,
постоянством
Рис. 1.4. Полярная система
координат
навигационного параметра.
Навигационный параметр – геометрическая или физическая величина,
зависящая от местоположения ВС и используемая для его определения.
При позиционном методе местоположение ВС определяется в полярной
системе координат (рис. 1.4), центр которой совпадает с точкой (позицией)
размещения РНС (поэтому метод называется позиционным).
В полярной системе координат в качестве навигационных параметров
используются:
расстояние r (наклонная дальность);
угол φ в горизонтальной плоскости, отсчитываемый от севера (азимут);
угол β в вертикальной плоскости, отсчитываемый от горизонта (угол
места);
разность расстояний Δr до двух РНС, задаваемая параметрами α и ρ (см.
рис. 1.5).
Следует отметить, что разность расстояний
самостоятельным
навигационным
параметром,
Δr = ra – rb
так
как
является
измеряется
непосредственно величина Δr , а сами расстояния ra и rb при этом неизвестны.
Высота полета H не является координатой в полярной системе координат.
В соответствии с видом навигационного параметра различают системы:
угломерные;
дальномерные;
18
разностно-дальномерные;
угломерно-дальномерные.
Каждый из навигационных параметров имеет свою форму линий
положения (ЛП).
Линия положения, характеризующаяся постоянством угла относительно
северного направления, представляет собой прямолинейный луч с началом в
точке размещения угломерной системы.
Линия положения, все точки которой находятся на одинаковом
расстоянии от дальномерной системы, является окружностью с центром в точке
установки РНС.
Линия положения, обеспечивающая постоянство разности Δr = ra – rb
расстояний от двух РНС до любой точки этой линии, представляет собой
гиперболу (рис. 1.5), в фокусах которой находятся разностно-дальномерные
радиомаяки. Расстояние 2d между маяками называется фокусным, или базой
системы.
Δr1= rb1 – ra1= –2a1 <0
Δr1= 2a1 >0
Y
Δr2= –2a2 <0
|Δr2| > |Δr1|
a1
a1
M
b2
ra1
A
β2
ρ1
α1
β1
b2
b1
rb1
X
B
b1
a2
d
d
rab
Рис. 1.5. Построение линий положения разностно-дальномерной РНС
19
Каждому значению Δr = ra - rb соответствует своя гипербола, описываемая
следующими параметрами:
расстоянием a от середины базы до вершины гиперболы
a
Δr
;
2
(1.8)
расстоянием b от вершины гиперболы до точки пересечения с ее
асимптотами, к которым она стремится в бесконечности (отсюда видно,
что точка пересечения с асимптотами находится на окружности радиуса
d)
b d 2 a2
1
4 d 2 r 2 ;
2
(1.9)
углом β наклона асимптот гиперболы
4 d 2 Δr 2
b
;
arctg arctg
a
Δr
(1.10)
эксцентриситетом e гиперболы
e
d 2d
.
a Δr
(1.11)
Уравнение гиперболы в прямоугольной системе координат, ось X которой
совпадает с базой системы, а ось Y с перпендикуляром к ее середине будет
4
Δr
4
2
x
2
2
4 d Δr
2
2
y 1.
(1.12)
В полярной системе координат уравнение гиперболы
2
2
4 d Δr
.
(1.13)
2 Δr 4 dCos
При Δr = 0 гипербола превращается в прямую, совпадающую с осью Y
(нормалью к середине базы). Две гиперболы, имеющие одинаковую величину
|Δr|, но различающиеся ее знаком, располагаются симметрично оси Y.
Для определения места ВС при позиционном методе необходимо
пересечение двух линий положения, каждая из которых задается своим
радиомаяком. При этом возможны различные комбинации линий положения
(радиомаяков).
Точность определения места зависит от взаимного расположения ВС и
радиомаяков. При этом можно выделить так называемое главное направление
системы, на котором погрешность определения местоположения для любого
20
расстояния будет меньше, чем погрешность на том же расстоянии от центра
базы, но на другом направлении.
На рис. 1.6 показано определение места ВС по двум дальномерным РНС.
Линии положения являются окружностями, которые пересекаются в двух
точках: МС1 и МС2 . Таким образом, имеет место неоднозначность определения
местоположения по двум дальностям.
Разрешение неоднозначности возможно только за счет привлечения
внешней информации от других источников. Однако обычно место заранее
приблизительно известно (например, по результатам счисления пути), что
позволяет отбросить заведомо неверное решение.
Главным направлением дальномерных РНС является перпендикуляр к
середине базы. Угол пересечения ψ линий положения заключен между
касательными к ним в точке пересечения. Наилучшая точность достигается при
угле ψ = 90° , а наихудшая получается на базе системы, так как при этом ψ = 0.
Определение места ВС по двум угломерным радиомаякам показано на
рис. 1.7. Линии положения представляют собой прямые, пересекающиеся под
углом ψ.
Главное
направление
Главное
направление
ЛПa
ЛПb
СИ
ψ
ra
ψ
φa
МС1
ЛПa
МС
A
rb
2d
A
С'И СИ
δ
2d
B
МС2
φb
B
ЛПb
Рис. 1.6. Определение места
по дальномерным РНС
Рис. 1.7. Определение места
по угломерным РНС
21
а
б
90°
СИ
φ
СИ
ЛПφ
МС
ЛПφ
ψ
МС2
φ
φmax
r
A
A
МС1
r
2d
B
ЛПr
ЛПr
Рис. 1.8. Определение места по угломерно-дальномерным РНС:
а – совмещенным; б – разнесенным
Главным направлением угломерных систем является также перпендикуляр
к середине базы. Система имеет однозначное определение местоположения
только на удалении от базы. При приближении ВС к базе системы точность
ухудшается (так как ψ →180° ), а на самой базе определение места невозможно,
поскольку точек пересечения линий положения становится бесчисленное
множество.
Комбинация угломерного и дальномерного радиомаяков изображена на
рис. 1.8. При этом возможны два варианта их размещения:
совмещенный (рис. 1.8, а), когда оба маяка находятся в одной точке;
разнесенный (рис. 1.8, б), при котором радиомаяки размещаются в разных
точках.
Одна точка пересечения линий положения соответствует точке касания
ЛПr
и
ЛПφ , но при этом
ψ = 0 , что существенно снижает точность
определения местоположения. Этот случай (рис. 1.8, б) имеет место при r ≤ 2d ,
если выполняется условие
Sinmax
r
,
2d
(1.14)
22
где r – расстояние от ВС до дальномерного радиомаяка;
φ' – азимутальный угол, отмеренный от базы системы;
d – половина базы системы.
Геометрическое
место
точек,
где
выполняется
условие
(1.14),
представляет собой окружность радиусом d с центром в середине базы (рис.
1.8, б).
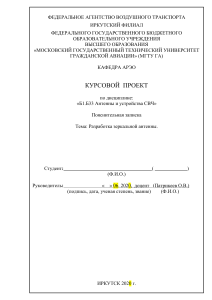
На рис. 1.9 показано определение местоположения ВС с использованием
разностно-дальномерной системы. Для получения двух значений разности
расстояний Δr1 и Δr2 требуется две пары радиомаяков, однако один из них
может быть общим для каждой из пар.
База каждой из пар радиомаяков видна из точки местоположения самолета
под углами γab и γac (называемых также углами визирования). При этом
касательные к точке пересечения линий положения, задаваемых каждой парой
станций, являются биссектрисами углов визирования γab и γac. Поэтому угол
пересечения линий положения ЛП1 и ЛП2 равен ψ = 0,5(γab + γac ).
Главное
направление
ψ
rc
γbc
МС
γab /2
γac
rb
2d0
ra
γab
2d2 = rac
γac /2
β
2d1 = rab
B
A
ЛП1
ЛП2
Δr2 = ra – rc < 0
Δr1 = ra – rb < 0
Рис. 1.9. Определение места по разностно-дальномерным РНС
C
23
Главным
направлением
разностно-дальномерной
РТС
является
биссектриса угла (180° – β) между частными базами станций А и B и станций
A и C, где β — угол пересечений частных баз.
1.1.3. Обзорно-сравнительный (корреляционно-экстремальный) метод
Каждая
точка
пространства,
имеющая
свои
координаты,
может
характеризоваться набором некоторых параметров окружающей среды как
естественного
(температура,
давление,
напряженность
магнитного
или
гравитационного полей Земли и других), так и искусственного характера
(напряженность электромагнитных полей радиостанций). Если этот набор
параметров для каждой точки уникален, то можно идентифицировать эту точку,
сравнивая его фактические значения с заранее измеренными и запомненными
эталонными значениями [14].
По технологии определения координат искомой точки этот метод получил
название
обзорно-сравнительного.
При
этом
отыскивается
максимум
совпадений фактического и эталонного набора. Мерой такого совпадения может
служить значение взаимной корреляционной функции. Чем точнее совпадают
распределения (поля) фактических и эталонных параметров, тем больше
значение
взаимной
корреляционной
функции.
Поэтому
такой
метод
определения координат называется также корреляционно-экстремальным.
Для
того
чтобы
параметр, по
которому осуществляется
оценка
совпадения, мог использоваться в корреляционно-экстремальной системе, он
должен:
быть стабильным во времени;
измеряться с высокой точностью;
обладать ярко выраженной зависимостью от местоположения;
обеспечивать
возможность
получения
и
распределений (полей) параметра в пространстве.
хранения
эталонных
24
В авиации полет выполняется над земной поверхностью из одной ее точки
в другую, поэтому какие-либо параметры земной поверхности целесообразно
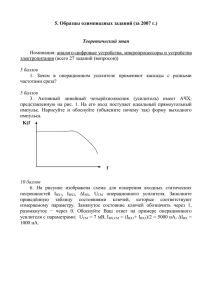
использовать как параметры внешней среды для определения места воздушного
судна (ВС) обзорно-сравнительным методом.
В
качестве
одного
из
таких
параметров
можно
использовать
распределение высоты рельефа местности. Измеренная высота рельефа Δh (как
разность абсолютной Набс и истинной Нист высот полета) в текущей точке
траектории (рис.1.10, а) сравнивается с координатно-привязанным эталонным
рельефом, хранящимся в запоминающем устройстве.
Другим примером реализации такого метода определения координат ВС
является использование бортовой радиолокационной станции (БРЛС).
При обзоре земной поверхности БРЛС излучает короткий радиоимпульс
длительностью τи в секторе пространства, размер которого определяется
шириной диаграммы направленности антенны (ДНА) в вертикальной и
горизонтальной плоскостях. Все точки земной поверхности, облученные
радиоимпульсом, отражают его (в том числе и обратно в сторону БРЛС).
τи
γ
а
Hабс
ra
r
Hист
Δh
б
R
Водная
поверхность
rb
Диффузная
поверхность
b Необлучаемая c
поверхность
Радиолокационная тень
t
tb
tc
Рис. 1.10. Образование радиолокационного изображения на индикаторе БРЛС:
а – рельеф местности; б – интенсивность принятого сигнала
(яркость линии развертки дальности)
25
Интенсивность обратно отраженного и принятого радиолокатором
сигнала (рис. 1.10, б) зависит от характера отражения (диффузное или
зеркальное),
который
определяется
видом
отражающей
поверхности.
Количественно он оценивается коэффициентом ρ(γ) обратного отражения,
который показывает, какая доля отраженной мощности приходится на
направление, обратное направлению облучения. Величина этого коэффициента
может изменяться от значений, близких к нулю (при зеркальном отражении), до
значений, близких к единице (для уголковых отражателей), а также зависит от
угла скольжения γ, под которым облучается поверхность.
Поэтому интенсивность принятого радиолокатором сигнала также будет
изменяться в большом диапазоне. Для гладких водных поверхностей получается
зеркальное отражение, и сигнал, принятый БРЛС, близок к нулю. От плоских
вертикальных и наклонных поверхностей (стены домов, крыши) происходит
переотражение падающей волны, в том числе строго в обратном направлении,
что обеспечивает достаточно высокое значение принятого сигнала. От
шероховатых поверхностей (типа пашни, луга, леса) происходит диффузное
отражение
радиоволн
во
всех
направлениях,
и
величина
принятого
радиолокатором сигнала имеет среднее значение. Поэтому водные поверхности
отображаются на индикаторе БРЛС в виде темных пятен, населенные пункты
дают яркую засветку, равнинная местность имеет равномерную малую, а лесной
массив – среднюю яркость.
Каждая точка земной поверхности характеризуется интенсивностью
обратно отраженного сигнала и имеет в полярной системе координат, связанной
с воздушным судном, свое удаление r и угловое положение θ в горизонтальной
плоскости, отмеряемое от продольной оси самолета.
В момент излучения радиоимпульса начинается формирование на
индикаторе БРЛС радиальной развертки дальности, направление которой
изменяется синхронно со сканированием ДНА в горизонтальной плоскости.
Скорость перемещения электронного луча вдоль развертки дальности постоянна
26
и определяется масштабом выводимого изображения. Яркость свечения точек
развертки дальности зависит от интенсивности принятого радиолокатором в
этот момент сигнала. Поэтому каждая точка земной поверхности, имеющая свое
удаление r (а значит, и свое значение времени запаздывания сигнала tз=2r/c) от
ВС, отображается на развертке дальности на своем месте и имеет свое значение
яркости свечения. То есть коэффициент ρ(γ) обратного отражения, от которого
зависит интенсивность отраженного и принятого сигнала, преобразуется в
яркость свечения точек развертки дальности.
Таким образом, на индикаторе БРЛС создается яркостное черно-белое
радиолокационное отображение земной поверхности, каждая точка которого
соответствует пространственному распределению интенсивности отраженного
от местности сигнала. В современных радиолокационных индикаторах
амплитудные изменения сигнала преобразуются в цветовые отличия, что
облегчает восприятие изображения местности.
МК
КУО
Краснодарское
водохранилище
40
r0
40
NM
Рис. 1.11. Вид радиолокационного изображения местности на индикаторе
бортовой радиолокационной станции
27
Вид радиолокационного изображения местности на индикаторе БРЛС
представлен на рис. 1.11. Оно очень похоже на картографическое изображение
местности, поэтому в качестве эталонного отображения местности при
использовании БРЛС для определения места самолета используются
географические карты. На рис. 1.12 приведен фрагмент географической карты,
содержащий участок местности, отображенный на индикаторе БРЛС,
представленном на предыдущем рисунке.
Схожесть радиолокационного и картографического изображений земной
поверхности позволяет использовать их для опознавания местности и
ориентации. Однако имеются и довольно значительные отличия изображений.
Расстояния на индикаторе БРЛС отображаются наклонной дальностью до
точек местности, в то время как на карте этим точкам соответствуют
горизонтальные дальности. Это приводит к пространственному искажению вида
отображаемой местности. Наклонная дальность r связана с горизонтальной R
простой зависимостью
2
2
r R H , где H — высота полета.
0 20 40 60 80 100 км
Рис. 1.12. Фрагмент географической карты, содержащий участок
местности, отображенный на индикаторе БРЛС
28
Тогда относительная ошибка из-за влияния высоты полета при измерении
расстояний по индикатору
r
rR
R
2
2
2
R H R
H
1 1.
R
R
(1.15)
Зависимость этой ошибки, %, от расстояния для различных высот
показана на рис. 1.13. Отсюда видно, что при больших удалениях или малых
высотах эта ошибка незначительна. Для R / H > 4 величина относительной
ошибки не превышает δr < 3 %, и ею можно пренебречь.
При сравнении картографического и радиолокационного изображений
необходимо учитывать, что последнее может довольно сильно искажаться из-за
возникновения на нем радиолокациионных теней (см. рис. 1.10).
При гористом характере рельефа местности возможно появление на ней
участков, не облучаемых радиолокатором (затененных возвышенностями
рельефа). Поэтому сигнал от таких участков на приемник БРЛС не приходит и
на изображении появляются темные пятна, которые воспринимаются как
водные поверхности.
δr , %
На
изображении
60
радиолокационном
(см.
рис.
1.11)
наличие таких теней от отрогов
50
1 – H=1 км
2 – H=5 км
3 – H=10 км
40
r1 ( R)
r230
( R)
r3 ( R)
1
R , км
0
0
10
приводит
искажению
контура
к
морского
Для определения места ВС с
2
10
гор
побережья.
3
20
Кавказских
20
30
40
50
60
R
Рис. 1.13. Зависимость относительной
ошибки измерения расстояния δr
от дальности для разных высот полета H
помощью БРЛС на изображении
выбираются
радиолокационные
ориентиры (РЛО), которые легко
опознаются и координаты которых
известны и обозначены на карте. В
качестве
РЛО
обычно
29
используются населенные пункты, озера и реки, береговая черта, острова,
крупные мосты и плотины.
Далее по индикатору БРЛС определяется курсовой угол ориентира (КУО)
и наклонное расстояние r0 до него.
Курсовой угол ориентира – это угол между продольной осью индикатора
(совпадающей с продольной осью ВС) и направлением на РЛО. Отсчет угла
осуществляется по азимутальной шкале индикатора. Точность измерения угла в
современных радиолокаторах составляет 1–1,5°.
Наклонное
расстояние
измеряется
на
экране
индикатора
путем
интерполяции изображения РЛО между масштабными метками дальности,
имеющими форму колец. Точность измерения наклонной дальности при этом
зависит от интервала между метками дальности и составляет приблизительно от
1 км (для 10-километровых меток дальности) до 4 км (для 50-километровых
меток).
На радиолокационном изображении (см. рис. 1.11) в качестве РЛО
выбрано Краснодарское водохранилище, дающее легко опознаваемую отметку в
виде темного пятна, по форме совпадающего с его изображением на карте (см.
рис. 1.12).
Место
самолета
при
использовании
радиолокатора
может
быть
определено и при пролете над радиолокационным ориентиром, находящимся на
траектории полета. В момент пролета координаты самолета считаются равными
координатам РЛО.
Обзорно-сравнительный
метод
определения
места
самолета
с
использованием БРЛС находит широкое применение в воздушной навигации.
Достоинствами такого метода являются:
автономность, что важно при полетах по трассам с недостаточным
радиотехническим обеспечением полетов;
простота определения места, не требующая сложных расчетов;
достаточно высокая точность по сравнению с визуальной ориентировкой.
Основной недостаток этого метода заключается в невозможности его
применения в безориентирной местности, например, над обширными морскими
пространствами или пустынными поверхностями.
В безориентирной местности для определения места могут использоваться
специальные радиолокационные маяки-ответчики.
30
1.1.4. Определение координат в спутниковых системах навигации
1.1.4.1. Квазидальномерный метод определения координат
В среднеорбитальных спутниковых системах навигации измеряются
пространственные
координаты
потребителя
в
геоцентрической
системе
координат (рис. 1.14).
Z
ИСЗ3
z2
z3
z4
ИСЗ1
R3
R1
ИСЗ2
z1
R2
-x3
Гринвичский
меридиан
-x1
Z0
y2
0
-y1
Плоскость
экватора
ИСЗ4
X0
R4
y0
Y
y3
Объект
X
Земли
x2
Ось вращения
x4
Рис. 1.14. Геоцентрическая прямоугольная система координат
спутниковой системы навигации
y4
31
Спутниковые системы ГЛОНАСС и GPS используют дальномерный
метод.
Определение места ВС по трем дальностям до искусственных спутников
Земли (ИСЗ) в спутниковой системе навигации показано на рис. 1.15.
ИСЗ32
а
ИСЗ2
R3
ИСЗ1
Hисз3
ЛП123
ЛП23
ЛП13
R2
Hисз1
R1
ПП3
r1
ПП2
ЛП1
Rзем
ПП1
ЛП3
б
ИСЗ3
ИСЗ2
МС
r2
ЛП2
r3
ИСЗ1
r1
ЛП1
Рис. 1.15. Определение места в спутниковой системе навигации дальномерным
методом: а – по трем поверхностям положения в пространстве;
б – по трем линиям положения на поверхности Земли
32
Поверхность
положения
(ПП),
характеризующаяся
постоянством
расстояния R до спутника, представляет собой сферу (рис. 1.15, а) с центром
в точке нахождения ИСЗ, являющегося опорной радионавигационной точкой.
Для определения трех координат в пространстве необходимо пересечение
трех поверхностей положения. Пересечение двух поверхностей ПП1 и ПП2 дает
одну пространственную линию положения ЛП12 . Три пространственных линии
положения ЛП12 , ЛП13 и ЛП23, соответствующие различным парам поверхностей
положения постоянной дальности, пересекаются в одной точке, являющейся
местом положения потребителя.
Пересечение поверхности положения ПП1 с поверхностью Земли (рис.
1.15, б) представляет собой линию положения в виде окружности ЛП1 радиусом
r1 . Если потребитель находится на поверхности земли (рис. 1.15, б), то его
место определяется пересечением трех плоских линий положения.
Строго говоря, r является сферическим радиусом на поверхности Земли, и
его величина
Rзем
,
r Rзем arccos
Rзем H исз
(1.16)
где Rзем – радиус Земли;
Hисз – высота орбиты ИСЗ от поверхности Земли.
В спутниковых системах ГЛОНАСС и GPS измеряются так называемые
квазидальности (псевдодальности) от объекта до ИСЗ. Под квазидальностью R
понимается измеренная дальность до ИСЗ, отличающаяся от истинной
дальности R на постоянную (за время измерения) величину δR . То есть
R R R ,
δR = cΔtшв ,
(1.17)
где c – скорость распространения электромагнитной волны;
Δtшв – расхождение шкал времени системы и потребителя (объекта);
δR – ошибка измерения расстояния за счет расхождение шкал времени.
Наличие постоянной величины δR вызвано тем, что в этих спутниковых
системах используется беззапросный метод определения дальности.
33
Сущность квазидальномерного
метода определения координат
рассмотрим на примере рис.
ψ
ЛП1
Y
ЛП2
y0
1.16.
r1
Пусть в прямоугольной
системе координат имеются две
опорные
y1
РМ1
r2
радионавигационные
точки РМ1 и РМ2 с известными
координатами,
относительно
которых потребитель измеряет
свое удаление r1 и r2. Высотой
y2
РМ2
0
x0
x1
X
x2
Рис. 1.16. Квазидальномерный метод
определения координат
полета ВС можно пренебречь и
считать пример плоским.
Тогда искомые координаты потребителя на плоскости определятся из
решения системы уравнений
( x1 x0 )2 ( y1 y0 )2 r12 .
( x2 x0 )2 ( y2 y0 )2 r22
Для
определения
пространственных
координат,
как
указывалось,
требуется пересечение трех поверхностей положения. Поэтому система
уравнений должна содержать три независимых уравнения, то есть необходимо
измерять
расстояние
до
трех
ИСЗ.
Кроме
того,
при
использовании
беззапросного метода измерения дальности неизвестной является также
величина расхождения шкал времени Δtшв и связанная с ней ошибка (1.17)
измерения расстояния δR.
Следовательно, для определения трех пространственных координат
потребителя x0, y0, z0 и поправки к шкале времени Δtшв требуется измерять
расстояния до четырех ИСЗ и решать систему из четырех уравнений вида [11]
( xi x0 ) 2 ( yi y0 ) 2 ( zi z0 ) 2
Ri R ,
Ri
i = 1, . . . , 4 ,
(1.18)
34
где Ri – истинное расстояние до i-го ИСЗ;
δR – ошибка измерения расстояния за счет расхождения шкал времени;
Ri – квазидальность до i-го ИСЗ;
xi , yi , zi – геоцентрические координаты i-го спутника.
В среднеорбитальных спутниковых системах навигации возможно также
измерение составляющих скорости перемещения потребителя вдоль осей
геоцентрической системы координат.
Действительно, продифференцировав систему уравнений (1.18) по
времени, получим систему из четырех уравнений вида
Ri R
1
[( x x )(x x ) ( yi y0 )( yi y0 ) ( zi z0 )(zi z0 )] ,
( Ri ctшв ) i 0 i 0
(1.19)
i = 1, . . . , 4 ,
где R'i – радиальная скорость изменения расстояния до i-го ИСЗ;
δR' – поправка к радиальной скорости за счет расхождения частот опорных
генераторов потребителя и ИСЗ;
Ri – истинное расстояние до i-го ИСЗ;
Δtшв – расхождение шкал времени ИСЗ и потребителя;
c – скорость света;
x0 , y0 , z0 – пространственные координаты потребителя в геоцентрической
системе координат;
x'i , y'i , z'i , x'0 , y'0 , z'0 – составляющие скорости движения (первые производные
координат по времени) в геоцентрической системе координат соответственно iго ИСЗ и потребителя.
Координаты потребителя x0, y0, z0 и поправка к шкале времени Δtшв
определяются после решения системы уравнений (1.18), а составляющие
скорости движения i-го ИСЗ x'i , y'i , z'i содержатся в навигационном сигнале,
передаваемом с искусственного спутника.
35
Величина
(R'i+δR')
называется
квазискоростью
и
определяется
доплеровским методом через разность частоты принятого с i-го ИСЗ сигнала и
частоты опорного генератора потребителя.
Тогда
решение
системы
уравнений
(1.19)
позволяет
определить
составляющие скорости движения потребителя x'0, y'0, z'0 и величину δR',
определяющую расхождение частот опорных генераторов.
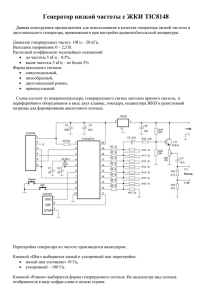
1.1.4.2. Разностно-дальномерный метод определения координат
В низкоорбитальных спутниковых системах навигации «Транзит» (США)
и «Цикада» (Россия) используется разностно-дальномерный метод определения
места (рис. 1.17). При этом измеряется разность расстояний от объекта до
одного ИСЗ в последовательные моменты времени t1 , t2 , t3 . Тогда за интервал
измерения Δt = t2 – t1 спутник переместится по орбите на расстояние d,
являющееся базой разностно-дальномерного измерения
d
2 ( Rзем H исз )
Δt ,
Tобр
(1.20)
где Rзем – радиус Земли;
Hисз – высота орбиты ИСЗ от поверхности Земли;
Tобр – период обращения ИСЗ;
Δt – интервал измерения.
Разность расстояний Δr1 = r1 – r2 между последовательными измерениями
до ИСЗ в моменты времени t1 и t2 образуют поверхность положения ПП1,
представляющую собой гиперболоид вращения, в фокусах которого находился
спутник в моменты измерения расстояний. Пересечение гиперболоида и
поверхности Земли образует линию положения ЛП1, каждая точка которой
имеет одинаковое значение Δr1. Форма линии положения ЛП1 близка к
сферической гиперболе. На этой линии положения в момент измерения t2 и
находится объект.
36
ПП2 Δr2 = r2 – r3
t2
ИСЗ
t1
d1
r1
ПП1
t3
d2
r2
M2
r3
Δr1 = r1 – r2
ЛП2
ЛП1
M1
Hисз
Rзем
Орбита ИСЗ
Подспутниковый
след
Рис. 1.17. Определение места в спутниковой системе навигации
разностно-дальномерным методом
В момент времени t3 измеряется расстояние r3, которое образует
поверхность положения ПП2 Δr2 = r2 - r3 и соответствующую ей линию
положения ЛП2 , на которой находится объект в этот момент времени.
В связи с тем, что скорость перемещения ИСЗ много больше скорости
объекта, последней можно пренебречь и считать объект неподвижным.
Следовательно, он должен находиться на ЛП1 и ЛП2 одновременно, что
возможно только в точках их пересечения M1 и M2, которые и определяют
местоположение объекта.
Для повышения точности определения места необходимо, чтобы угол
пересечения линий положения (гипербол) был близок к Ψ=90°. Это требует
достаточно большого значения базы d разностно-дальномерных измерений,
получаемой за интервал измерения Δt. Это возможно при использовании
низкоорбитальных спутниковых созвездий.
37
Определение места возможно, когда объект находится в зоне видимости
спутника. При этом необходимо провести не менее трех измерений (каждое из
которых в системе «Транзит» длится две минуты, необходимые для приема
блока орбитальной информации со спутника).
В спутниковых системах «Цикада» (Россия) и «Транзит» (США) высота
орбит составляет Hисз ≈ 1000 км, период обращения спутников Tобр ≈ 100 минут
и время видимости спутника на земной поверхности составляет tвид ≈ 18 мин.
Поэтому при небольшом количестве спутников в созвездии место объекта
определяется периодически. Интервал между обсервациями зависит от широты
нахождения объекта и составляет от 30 минут в высоких широтах до 5 часов в
экваториальных районах.
1.2. Точность определения местоположения
При позиционном методе искомое место определяется как точка
пересечения нескольких поверхностей положения.
Место воздушного судна, строго говоря, должно определяться как точка в
пространстве. Однако в большинстве случаев (за исключением использования
спутниковых
систем
навигации)
для
традиционных
систем
наземного
расположения, учитывая, что высота полета обычно меньше наклонной
дальности до ВС и, тем более, много меньше радиуса Земли, можно упростить
задачу и рассматривать ее на плоскости.
Тогда место воздушного судна является точкой M0 пересечения двух
истинных линий положения ЛП1 и ЛП2 (рис. 1.18), которые в общем случае
могут иметь любую форму. В силу того, что дальность до радионавигационной
системы обычно велика и достаточно малы ошибки определения линий
положения, можно считать последние вблизи места ВС отрезками параллельных
прямых.
38
ЛП'1
ЛП'2
M1
ЛП''2
l1
δ2
ЛП''1
M4
l4
δ1
l2
M2
M0
l3
ЛП1
M3
ЛП2
Рис. 1.18. Определение места воздушного судна точкой
пересечения линий положения
Предположим, что из-за случайных линейных ошибок δ1, δ2 определения
линий положения были найдены соответственно ЛП'1 и ЛП'2 . Тогда место ВС в
этом случае будет определено в точке M1 . Расстояние l1 между истинной точкой
M0 нахождения ВС и найденной точкой M1 будет случайной линейной ошибкой
единичного измерения места воздушного судна [21].
Для случая, когда известны величины ошибок δ1, δ2, но неизвестны их
знаки, получим (в зависимости от комбинации знаков) семейство возможных
точек M1, M2, M3, M4 и соответствующие им линейные ошибки измерения места
l1, l2, l3, l4.
Если же неизвестны и величины ошибок, то таких точек будет
бесчисленное множество. Поэтому судить о точности определения места ВС по
результатам единичного измерения нельзя. Однако, зная статистические
характеристики погрешностей измерения, можно оценить точность определения
места воздушного судна.
1.2.1. Эллипс ошибок
В силу того, что ошибки измерения обычно распределены по
нормальному закону с нулевым средним значением и независимы, то
двухмерная плотность вероятности совместного появления этих погрешностей
w( 1 , 2 )
1 2 2
exp 12 22 ,
2 1 2
2 1 2
1
(1.21)
39
где δ1, δ2 – случайные ошибки определения ЛП1 и ЛП2;
σ1 , σ2 – средние квадратические погрешности определения ЛП1 и ЛП2 .
Обозначим показатель экспоненты через λ2:
2
2
1 1 2
.
2 2 2
2
1
2
(1.22)
Тогда вероятность Pмс нахождения расчетного местоположения ВС в
некоторой области S(λ), ограниченной эллипсом (рис. 1.19.) заданных размеров,
Pмс
w( , )d d 1 exp ,
2
1
2
1
2
(1.23)
s ( )
откуда
ln(1 Pмс ) .
(1.24)
Выражение (1.22) представляет собой уравнение кривой равновероятных
ошибок [21] определения места воздушного судна. Зависимость параметра λ от
вероятности Pмс попадания расчетного места ВС в эллипс ошибок приведена на
рис. 1.20 и в табл. 1.1.
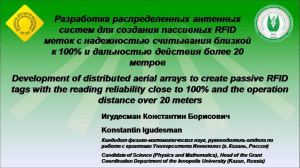
Пусть истинные линии положения (рис. 1.19) пересекаются под углом ψ.
Тогда точка M0 их пересечения определит истинное положение ВС. Выберем
прямоугольную систему координат XY с началом в точке M0 таким образом,
чтобы ось Y являлась биссектрисой угла ψ.
Расчетное место ВС из-за ошибок δ1, δ2 определения линий положения
будет соответствовать точке M1. Ее координаты в выбранной прямоугольной
системе будут x и y . Обозначим точкой N1 проекцию точки M1 на ось Y. Из
точки N1 опустим перпендикуляры на истинные линии положения. Тогда длины
соответствующих перпендикуляров будут равны ошибкам определения линий
положения, то есть N2N3= δ1 и N4N5 = δ2 .
Отсюда в выбранной системе координат
1 N1 N 3 N1 N 2 ySin
Ψ
Ψ
xCos ;
2
2
Ψ
Ψ
2 N1 N 5 N1 N 4 ySin xCos .
2
2
(1.25)
40
Y
Y′
ЛП′2
ЛП′1
N4
N1
y
ЛП′′1
N5
M1
N3
X
x
M0
ψ/2
ψ/2
ЛП1
φ
ψ
ЛП2
X'
ЛП′′2
N2
Рис. 1.19. Эллипс ошибок определения места
λ
Таблица 1.1
Значения параметра λ для
заданной вероятности Pмс
попадания места самолета
внутрь эллипса ошибок
2,5
2
1,5
Pмс
λ
1
0,1
0,3
0,5
0,632
0,683
0,954
0,997
0,327
0,6
0,833
1
1,072
1,755
2,41
0,5
Pмс
0
0
0,2
0,4
0,6
0,8
Рис. 1.20. Зависимость λ
1
от вероятности определения места ВС
Подставив (1.25) в (1.22) и проведя группировку членов, получим
1
1
1
1
2
2Ψ
x 2 2 Cos
xy 2 2 SinΨ
2
2
2
1 2 2
1 2 2
1
1 2 Ψ
2
2
y 2
Sin
0 .
2
2
2
2
1
2
(1.26)
41
Введем следующие обозначения:
1
1
2Ψ
Cos
A;
2 2 2 2
2
1
2
1
1
SinΨ 2 B ;
2 2 2 2
1
2
(1.27)
1
1 2 Ψ
Sin
C ; 2 D .
2
2
2
2
1 2 2
Тогда уравнение кривой равновероятных ошибок (1.22) будет иметь вид
Ax2 + 2Bxy + Cy2 + D = 0.
(1.28)
Это уравнение является уравнением эллипса в прямоугольной системе
координат с центром в точке M0 и осью Y, совпадающей с биссектрисой угла ψ .
Для определения ориентации эллипса ошибок введем еще одну
прямоугольную систему координат X′Y′ с центром в точке M0 , но повернутую
на некоторый угол φ относительно первоначальной системы (рис.1.19). Тогда
координаты обеих систем будут связаны друг с другом следующими
зависимостями:
x = x' Cosφ – y' Sinφ ;
y = x' Sinφ + y' Cosφ .
(1.29)
Подставив (1.29) в (1.28) и проведя преобразования, получим уравнение
кривой равновероятных ошибок в новой системе координат
A' x'2 2 B' x' y'C ' y'2 D 0 ,
с новыми коэффициентами
(1.30)
A' ACos 2 2 BSinCos CSin 2
B' B(Cos 2 Sin 2 ) ( A C ) SinCos
C ' ASin 2 BSinCos CCos
2
(1.31)
2
D' D
Из аналитической геометрии известно, что уравнение эллипса в
прямоугольной системе координат с центром в центре эллипса и осями
координат, совпадающими с осями эллипса, не содержит членов с первыми
степенями координат x' и y' . Тогда, приравняв нулю выражение (1.31) для B' и
решив его относительно φ, получим
2B
1
tg 2
22
tgΨ .
AC 2
2
1
2
2
(1.32)
42
Уравнение (1.32) определяет угол φ поворота осей эллипса ошибок
относительно оси Y , совпадающей с биссектрисой угла ψ пересечения линий
положения ЛП1 и ЛП2 (рис. 1.19).
Угол ψ может изменяться в интервале от 0° до 180°, а угол φ при этом –
только от 0° до 90°.
Отсюда можно сделать следующие заключения:
при σ1 ≠ σ2 поворот эллипса ошибок происходит в сторону линии
положения, измеренной с большей точностью;
при σ1 = σ2 большая полуось эллипса совпадает с осью Y, если ψ < 90°, и
поворачивается на угол φ = ±90°, если ψ > 90°.
Уравнение эллипса ошибок в системе координат, совпадающей с его
осями,
A' x'2 C ' y'2 D 0 .
(1.33)
Из этого уравнения, приравняв поочередно нулю соответствующие
координаты, можно определить длину полуосей эллипса [21]:
D'
A'
D'
0,5b y ' x '0
C'
0,5a x' y ' 0
.
(1.34)
Выразив уравнения (1.31) через тригонометрические функции двойного
угла, получим
2 A' 2 BSin2 ( A C )Cos 2 ( A C )
2C ' 2 BSin2 ( A C )Cos 2 ( A C )
,
а затем, преобразовав их через тангенс (1.32), окончательно определим значения
коэффициентов:
1
2
2
( A C) ( A C) 4B ,
2
1
2
2
C ' ( A C ) ( A C ) 4 B .
2
A'
(1.35)
Подставив (1.35) в (1.34), с учетом (1.31) получим выражения для
определения длины осей a и b эллипса ошибок:
43
4
a
1
1
2 2
1
2
2
1
1
1
1
2
2
Cos
Ψ
Sin Ψ
2
2
2
2
1 2
2 1
4 1 2
2
2
( 1 2 ) 1
b
;
2 2
4 1 2
2
1 2
Sin Ψ
( 1 22 ) 2
4
2
1
1
2 2
1
2
2
(1.36)
2
1
1
1
1
2
2
Cos
Ψ
Sin Ψ
2
2
2
2
1 2
2 1
4 1 2
2
2
( 1 2 ) 1
2 2
4 1 2
2
1 2
Sin Ψ
( 1 22 ) 2
,
(1.37)
где a , b – малая и большая оси эллипса ошибок;
σ1 , σ2 – средние квадратические погрешности определения ЛП1 и ЛП2 ;
ψ – угол пересечения линий положения ЛП1 и ЛП2 ;
λ – параметр, зависящий от вероятности попадания места ВС в эллипс ошибок.
Размер эллипса ошибок, как следует из (1.36) и (1.37), зависит от точности
σ1, σ2 определения линий положения, угла ψ их пересечения и заданной
вероятности Pмс попадания расчетного местоположения ВС внутрь эллипса.
Если точность определения обеих ЛП одинакова, то есть σ1 = σ2 = σ, то
оси эллипса будут:
a
b
2 2
1 CosΨ
2 2
1 CosΨ
2 2
1 CosΨ
2 2
1 CosΨ
ln(1 Pмс )
2
;
Cos(Ψ / 2 )
(1.38)
ln(1 Pмс )
2
.
Sin(Ψ / 2 )
(1.39)
На рис. 1.21, а показана зависимость размера осей эллипса ошибок от угла
пересечения линий положения для погрешности их определения σ =1,0 и
вероятности Pмс=0,632, соответствующей значению произведения σ λ=1.
44
а
a,b
24
21
18
15
12
9
σλ=1
b
6
a
3
Ψ
0
0° 10° 20° 30° 40° 50° 60° 70° 80° 90° 100° 110° 120° 130° 140° 150° 160° 170° 180°
φ˚
б
1
2
3
4
5
6
01 ( )
02 ( )
03 ( )
04 ( )
05 ( )
06 ( )
0° 10° 20° 30° 40° 50° 60° 70° 80°
90
0°
-5°1 ( )
-10°2 ( )
-15°3 ( )
-20°4 ( )
-25°5 ( )
-30°6 ( )
-35°
-40°
-45°
45°
40°
35°
30°
25°
20°
15°
10°
5°
Ψ
100° 110° 120° 130° 140° 150° 160° 170° 180°
6
5
4
3
2
1
1: k =1,0 ;
2: k = 1,2 ;
3 : k = 1,5 ;
4 : k = 2,0 ;
5 : k = 3,0 ;
6:- k = 10,0
Рис. 1.21. Зависимость от угла ψ пересечения линий положения: а – длины осей эллипса
ошибок (при σ λ = 1); б – угла поворота осей эллипса ошибок для разных значений
отношения k=σ2 / σ1
Для определения размера осей a и b эллипса ошибок для других значений
погрешности σ определения ЛП или вероятности Pмс попадания в него (при σ
λ ≠1) необходимо изменить полученную (в соответствии с рис. 1.21) величину
осей пропорционально изменению параметров σ или λ .
Рассмотрим, как зависят размеры и ориентация эллипса от угла ψ
пересечения линий положения (рис. 1.22) при σ1 = σ2 = σ:
если ψ <90°, то φ =0°, и большая ось эллипса совпадает с биссектрисой
угла ψ;
если ψ >90°, то φ = ±90°, то есть большая ось перпендикулярна
биссектрисе угла ψ;
если ψ = 90°, то оси эллипса равны a b 2 2 ln(1 Pмс ) , и эллипс
превращается в окружность радиуса r 2 2 ;
45
если ψ = 0° или ψ =180°, то a 2 , b .
Последний случай означает, что эллипс вырождается в две параллельные
прямые на расстоянии a = 2σλ друг от друга, уходящие в бесконечность.
Для угломерных радионавигационных
систем (РНС) угол ψ=0°, если самолет
ЛП2
a=2σλ
ось
ЛП1
Ψ=0°
которого будет уменьшаться с уменьшением
Y
удален
параллельные
от
базы.
прямые
При
этом
ориентированы
b=± ∞
бесконечно
перпендикулярно базе. По мере приближения
ВС
к
РНС
преобразуются
параллельные
в
расстояния. Угол
эллипс,
ψ=180°,
прямые
большая
если
самолет
a
находится точно на базе угломерных РНС, при
этом прямые параллельны самой базе.
Для
дальномерных
пересечения
линий
РНС
положения
b
угол
заключен
ЛП1
ψ<90°
Y
ЛП2
ЛП1
Ψ=90°
ЛП2
между касательными к ЛП, поэтому ψ=0° при
нахождении ВС на базе дальномерных РНС, а
2r
ψ = 180° – при бесконечном удалении от базы.
Вследствие этого ориентация эллипса для
дальномерных
ориентации
РНС
эллипса
перпендикулярна
ошибок
угломерных
Y
b
систем.
a
1.2.2. Градиент линий положения
Поскольку линия положения является
геометрическим
местом
ЛП1
точек,
характеризующимся постоянством некоторого
ψ>90°
ЛП2
b=± ∞
ЛП1
ЛП2
навигационного параметра, то погрешности
Ψ=180°
измерения последнего, естественно, приводят
a=2σλ
Рис. 1.22. Размеры и ориентация
эллипса в зависимости от угла ψ
к погрешностям определения ЛП. Это в свою
46
очередь
g
обусловливает
наличие
погрешности определения места ВС [12].
На рис. 1.23 показаны две линии
Δn
90°
ЛП
u+Δu
положения, сдвинутые на величину Δn изза ошибки измерения Δu навигационного
u
Рис. 1.23. Градиент линии
положения
параметра.
Связь
между
погрешностями
измерения Δu навигационного параметра
и определения Δn линии положения характеризуется градиентом линии
положения.
Градиент – это векторная величина, которая всегда направлена по
нормали к линии положения. Модуль градиента ЛП
Δu Δu
.
Δn
Δn 0 Δn
g lim
(1.40)
Если градиент известен, то ошибка определения ЛП может быть оценена
по известной ошибке измерения навигационного параметра
Δn
Δu
.
g
Чем больше величина градиента, тем меньше ошибки определения линий
положения при том же значении ошибок измерения навигационного параметра.
Переходя к средним квадратическим погрешностям (СКП), получим
нп
g
,
(1.41)
где σ – среднеквадратическая погрешность определения линии положения;
σнп
–
среднеквадратическая
погрешность
определения
навигационного
параметра;
g – модуль градиента линии положения.
Определим величину градиента для основных линий положения,
применяемых в аэронавигации. На рис. 1.24 показаны изменения линий
положения из-за ошибок измерения навигационного параметра (расстояние,
угол, разность расстояний).
47
б
а
в
С
g
y
Δn
α+Δα
Δn
α
γ
r +Δr
r
g
Δn
ra
g
rb –Δr
γ/2
x
rb
ra +Δr
A
B
d
d
Рис. 1.24. Величина градиента линий положения для систем:
а – дальномерных; б – угломерных; в – разностнодальномерных
При
дальномерном
методе
(рис.
1.24,
а)
ошибка
измерения
навигационного параметра Δu = Δr приводит к смещению ЛП на величину Δn =
Δr , в силу чего градиент
gr
Δr
1 ,
Δr
(1.42)
а СКП определения ЛП в соответствии с (1.41) σ = σr и не зависит от дальности.
Для угломерного метода (рис. 1.24, б) измеряемый навигационный
параметр – это угол α , а ошибка его измерения Δu = Δα . Тогда смещение линии
положения Δn = r tgα = r Δα , и градиент, имеющий размерность м –1 , будет
g
Δ 1
,
rΔ r
(1.43)
где r – расстояние от радиомаяка до воздушного судна.
Отсюда следует, что с увеличением расстояния до радионавигационной
системы (РНС) ошибки определения ЛП возрастают, то есть σ = r σα.
В разностно-дальномерном методе (рис. 1.24, в) разность расстояний
Δr ra rb
( x d )2 y 2 ( x d )2 y 2 .
48
Изменение разности расстояний на величину Δr приводит к смещению
линий положения на величину Δn =Δr/2Sin(0,5γ) , откуда градиент безразмерен:
g Δr 2 Sin
2
,
(1.44)
где γ – угол между направлениями на РНС (угол визирования базы).
Максимальное значение градиента, равное двум, достигается при γ = 180°,
то есть на линии, совпадающей с базой разностно-дальномерной системы.
Тогда среднеквадратическая погрешность определения линии положения
для разностно-дальномерного метода минимальна на базе системы и равна
Δr
.
(1.45)
2 Sin(0,5 )
1.2.3. Геометрический фактор
Линейная ошибка l определения места воздушного судна (рис. 1.19) может
быть найдена по теореме косинусов из треугольника M0M1N1 :
(M 0 N1 )2 (M 1 N1 )2 2(M 0 N1 )2 (M 1 N1 )2 Cos( )
l
12
2
Sin Ψ
22
2
Sin Ψ
2 1 2CosΨ
2
Sin Ψ
1
2
Sin Ψ
[ 12 22 2 1 2CosΨ ] .
Считая, что ошибки δ1 , δ2 определения линий положения распределены
по нормальному закону, перейдем к средней квадратической погрешности
определения места ВС
мс
1
12 22 2 12 1 2CosΨ ,
SinΨ
(1.46)
где σ1 , σ2 – средние квадратические погрешности (СКП) определения ЛП;
σмс – средняя квадратическая погрешность определения места ВС;
ψ – угол пересечения ЛП1 и ЛП2 ;
ρ12 – коэффициент корреляции погрешностей определения ЛП1 и ЛП2 .
СКП определения ЛП и места ВС имеют размерность расстояния.
Если погрешности σ1 и σ2 независимы (ρ12 = 0) , то
49
1
12 22 .
SinΨ
мс
Учитывая
зависимость
(1.41),
(1.47)
получим
выражение
средней
квадратической погрешности определения местоположения ВС через СКП
измерения навигационных параметров
1
мс
SinΨ
2
2
нп1 нп2
.
g1 g 2
(1.48)
Будем считать, что погрешности измерения навигационных параметров
одинаковы: σнп1 = σнп2 = σнп , тогда
мс
Г
нп
SinΨ
1
1
g1
2
g2
2
мс
1
нп SinΨ
Г нп ,
(1.49)
1
1
g1
2
g2
2
.
Выражение (1.49) связывает погрешности определения σмс места ВС и
измерения навигационных параметров σнп. Оно показывает, как зависит
точность определения места σмс от геометрии (влияющей на угол ψ и величину
градиента g) взаимного расположения РНС и воздушного судна.
Поэтому коэффициент Г называется геометрическим фактором, или
коэффициентом геометрии. Чем больше величина геометрического фактора,
тем ниже точность определения места ВС.
Рассмотрим, как изменяется значение геометрического фактора для
различных радионавигационных систем.
Для дальномерных систем из выражения (1.49) с учетом (1.42) получим
Гr
2
.
SinΨ
(1.50)
где Гr – геометрический фактор дальномерных систем (величина безразмерная).
График зависимости Гr от угла пересечения ψ линий положения показан
на рис. 1.25.
50
Гr
100
80
60
40
20
0
ψ , град
1
2
3 4
6
8 10
20
40
60 80 100
Рис. 1.25. Зависимость геометрического фактора дальномерных систем
от угла пересечения линий положения
Минимальное значение геометрического фактора дальномерных систем
Г rmin 2 и достигается при ψ = 90°. При ψ = 0° и ψ = 180° значение
геометрического фактора Гr = ∞, и определение места невозможно.
Для угломерных систем выражение для геометрического фактора (1.49) с
учетом (1.43) примет следующий вид:
Г
1
SinΨ
r12 r22 ,
(1.51)
где r1 , r2 – расстояния от радиомаяков до воздушного судна.
Значение геометрического фактора для разностно-дальномерных систем
(для ρ12 =0) определится из (1.49) и (1.44) в виде
1
2 1
Г Δr
Sin
2 SinΨ
2
Ψ
1
1 2
2
2
Sin 2
2
1
;
(1.52)
,
где γ1 , γ2 – углы визирования, под которыми видны соответствующие базы из
точки положения ВС (рис. 1.9.);
ψ – угол пересечения ЛП1 и ЛП2 .
51
Выражения для геометрического фактора (1.49) . . . (1.52) получены для
линий положения на плоскости при условии равенства СКП определения
навигационных параметров и их независимости. При невыполнении этих
условий выражения для геометрического фактора существенно усложняются.
Понятие
геометрического
фактора
как
некоторого
коэффициента,
связывающего погрешности определения местоположения с погрешностями
измерения навигационных параметров и зависящего от взаимного расположения
РНС и ВС, может быть распространено на пространственный случай,
характеризующийся пересечением поверхностей положения, например, в
спутниковой системе навигации [13].
Рассмотрим сечение поверхности равных расстояний от i-го ИСЗ до
объекта (рис. 1.26). Расстояние ri (являющееся измеряемым навигационным
параметром) определяется с некоторой радиальной погрешностью ± σri .
Составляющие этой погрешности вдоль осей прямоугольной геоцентрической системы координат
rx r Cos i r
ry r Cos i r
rz r Cos i r
x0 xi
ri
y0 yi
ri
z0 zi
ri
;
;
(1.53)
;
ri ( x0 xi ) 2 ( y0 yi ) 2 ( z0 zi ) 2 ,
где σri — среднеквадратическая погрешность измерения расстояния до i-го
спутника;
σrx , σry , σrz — геоцентрические составляющие погрешности измерения
расстояния;
x0 , y0 , z0 — геоцентрические координаты объекта;
xi , yi , zi — геоцентрические координаты i-го спутника;
αi , βi , γi — углы направляющих косинусов от объекта на i-й спутник;
ri — расстояние от объекта до i-го спутника.
52
a
Z
± σr i
ri
ИСЗ i
zi
ri
z0
-xi
αi
βi
0
x0
yi
γi
объект
Y
y0
Z
б
γi
X
αi
βi
Рис. 1.26. Взаимное расположение ИСЗ и объекта в
геоцентрической системе координат: а – ориентация
углов направляющих косинусов; б – составляющие
погрешности измерения дальности
ri
– σr i
+ σr i
σr x
x0 y0 z0
Y
σr y
X σr z
Связь между определяемыми координатами объекта и измеряемыми
квазидальностями до четырех ИСЗ описывается функциональной зависимостью,
называемой навигационной функцией , и может быть представлена в следующем
виде:
Ri Ri ( x0 , y0 , z0 , xi , yi , zi , Δtшвi , tk ) ;
(1.54)
53
i = 1, . . . , 4
, k = 1, 2, 3, . . . , N ,
где x0 , y0 , z0 , xi , yi , zi – геоцентрические координаты объекта и i-го спутника;
Δtшвi – рассогласование шкал времени объекта и i-го спутника;
tk – момент времени k-го измерения.
Навигационная функция (1.54) для спутниковой системы навигации
описывается системой из четырех нелинейных уравнений вида (1.18).
Линеаризация навигационной функции
Ri (t k )
в окрестностях некоторой
расчетной точки осуществляется путем разложения ее в ряд Тейлора
с использованием только первых производных разложения [22]. За начальную
расчетную точку R0i
с применением
принимается местоположение объекта, полученное
априорной
информации
или
информации
от
других
навигационных источников. В дальнейшем по мере решения навигационной
задачи за расчетную точку принимается уточненное решение, полученное в
предыдущем цикле.
Линеаризованная система
уравнений
имеет вид
R
R
R
Ri
Ri R0i i x i y i z
(cΔtшв ) ,
x
y
z
(cΔtшв )
(1.55)
i = 1, . . . , 4 .
Процесс преобразования навигационной функции удобнее представлять в
векторно-матричном виде.
Тогда решение системы линеаризованных уравнений (1.55) методом
последовательных приближений Ньютона находится в соответствии с векторноматричным уравнением
g
1
k 1
g G k ΔR k ,
k
(1.56)
T
где g k ( Δx, Δy, Δz, cΔtшв ) – вектор оцениваемых параметров в k-м измерении;
T
ΔR k ( R1 R1 , R2 R2 , R3 R3 , R4 R4 , ) − разница измеренных и расчетных
дальностей от потребителя до ИСЗ в k-м измерении;
Gk – градиентная матрица размерностью (4 × 4), рассчитанная по результатам
k-го измерения в виде
54
R1
x
R2
x
G
R3
x
R4
x
R1
y
R2
y
R3
y
R4
y
R1
z
R2
z
R3
z
R4
z
R1
( x1 x)
(cΔtшв )
r1
R2
( x2 x )
(cΔtшв )
r2
( x3 x)
R3
r3
(cΔtшв )
( x4 x)
R4
r4
(cΔtшв )
( y1 y )
r1
( y2 y )
r2
( y3 y )
r3
( y3 y )
r3
( z1 z )
r1
( z2 z )
r2
( z3 z )
r3
( z4 z )
r4
1
1
.
(1.57)
1
1
При решении навигационной задачи обычно имеется избыточный объем
навигационных измерений (k = 1, 2, 3, . . . , N), что позволяет осуществлять
статистическую обработку их результатов. В основе такой обработки лежит
метод наименьших квадратов, который успешно применяется в случаях, когда
измерения можно считать равновеликими и независимыми, а их погрешности
распределены по нормальному закону.
Тогда вектор оцениваемых параметров по методу наименьших квадратов
при проведении одномоментных измерений [13]
g
T
k 1
1
g (G k Wk
k
Gk )
1
1
T
G k Wk
ΔR k ,
(1.58)
где Wk – весовая матрица k-го измерения.
С учетом предположения о равенстве погрешностей измерения и их
независимости матрицу весовых коэффициентов W можно представить в виде
W I Dr ,
где I – единичная матрица;
Dr – матрица дисперсий погрешностей псевдодальномерных измерений.
Тогда корреляционная матрица ошибок определения оцениваемых
параметров (местоположения объекта)
Kg G
1
T
T
1
K r G (G K r
G)
1
,
(1.59)
где Kg , Kr – корреляционные матрицы ошибок определения местоположения и
ошибок измерения псевдодальностей.
Диагональными
элементами
этих
матриц
являются
дисперсии
определения пространственно-временных координат объекта (σ2x , σ2y , σ2z ,
σ2cΔtшв ) и измерения псевдодальностей (σ2rk , k = 1, 2, 3, . . . , N).
55
Для случая, когда погрешности измерения псевдодальности до всех ИСЗ
одинаковы и некоррелированы, корреляционная матрица Kr принимает вид
1
K r r (G G) .
(1.60)
Отсюда видно, что дисперсии погрешностей определения местоположения
2
T
объекта зависят от диагональных элементов матрицы (GT G) 1 . То есть
среднеквадратическая
погрешность
определения
местоположения
(пространственно-временных координат) объекта
мс x2 y2 z2 c2tшв
sp(K g ) ,
(1.61)
где функция sp(…) обозначает след матрицы и равна сумме ее диагональных
элементов.
Тогда можно ввести некоторый коэффициент, связывающий погрешности
определения местоположения (пространственно-временных координат) объекта
и измерения псевдодальностей до ИСЗ,
ГΣ
мс
1
T
1
sp[(G G) ]
x2 y2 z2 c2tшв .
r
r
(1.62)
Этот коэффициент ГΣ называется коэффициентом геометрии, или
геометрическим фактором (в англоязычной литературе он называется GDOP –
геометрический фактор ухудшения точности местоопределения).
Коэффициент
характеризующие
(1.62)
может
точность
быть
определения
разбит
места
на
ВС
составляющие,
по
различным
пространственно-временным координатам:
фактор ухудшения точности определения времени (TDOP)
Гt
1
r
c2tшв ;
(1.63)
вертикальный фактор ухудшения точности местоопределения (VDOP)
ГВ
1
r
z2 ;
(1.64)
горизонтальный фактор ухудшения точности местоопределения (HDOP)
ГГ
1
r
x2 y2 ;
(1.65)
56
фактор ухудшения точности определения пространственного положения
(PDOP)
ГП
1
r
x2 y2 z2 Г Г2 Г В2 .
(1.66)
Тогда геометрический фактор ухудшения точности местоопределения
(GDOP) можно выразить через другие коэффициенты в виде
Г Σ Г П2 Гt2 Г Г2 Г В2 Гt2 .
Величина коэффициента геометрии определяется в первую очередь
матрицей направляющих косинусов (1.57), которые зависят от взаимного
расположения объекта и ИСЗ (см. рис. 1.26).
Наименьшее значение геометрического фактора достигается при углах
пересечения поверхностей положения (сфер с центром в точке нахождения
ИСЗ), близких к 90°. Это получается, когда один спутник находится в зените над
объектом, а остальные образуют равносторонний треугольник низко над
горизонтом. При этом значение геометрического фактора ГΣ =1,45.
Геометрический фактор используется в спутниковой системе навигации в
качестве
критерия
выбора
конфигурации
рабочего
созвездия
ИСЗ,
обеспечивающего наилучшую точность определения места.
1.2.4. Рабочие зоны радионавигационных систем
Наглядное представление о точности определения местоположения для
различных РНС дают рабочие зоны (области) этих систем.
Рабочей
обеспечивается
зоной
РНС
определение
называется
область,
местоположения
ВС
в
пределах
которой
с
погрешностью,
не
превышающей заданное (допустимое) значение. Следовательно, внутри рабочей
зоны должно выполняться условие σмс ≤ σмс доп , а на ее границе это условие
становится равенством.
57
Тогда из (1.49) следует, что граница рабочей зоны есть линия, на которой
величина геометрического фактора постоянна, то есть
Г
мсдоп
(1.67)
Const .
нп
Таким образом, для построения рабочих зон РНС необходимо построить
семейство изолиний геометрического фактора для различных значений σмс доп .
При этом необходимо учитывать, что рабочая зона существует только в
тех областях пространства, в которых принимается сигнал обоих радиомаяков.
То есть она ограничена также дальностью действия используемых радиомаяков.
Рассмотрим вид рабочих зон различных радионавигационных систем.
1.2.4.1. Дальномерные системы
Рассмотрим случай (см. рис. 1.27, а), когда ВС находится на
перпендикуляре к середине базы двух дальномерных радиомаяков (точка М0 ).
Условие (1.67) с учетом (1.50) для дальномерных систем будет иметь вид
Гr
мсдоп
2
Const .
SinΨ
r
(1.68)
Линии положения дальномерных систем представляют собой окружности,
угол пересечения ψ которых заключен между касательными к ним в точке
пересечения.
Из рис. 1.27 видно, что угол ψ пересечения линий положения и угол γ
визирования РНС связаны зависимостью Ψ + γ = 180° и, значит, Sinψ = Sinγ .
Поэтому в выражении (1.68) для геометрического фактора дальномерных
систем Sinψ можно заменить на Sinγ . Постоянство геометрического фактора
(1.68) при этом равносильно постоянству угла визирования γ .
Известно, что вписанные в окружность углы равны, если они опираются
на одну дугу этой окружности. Таким образом, границы рабочих зон
дальномерных РНС, соответствующих различным значениям геометрического
фактора, представляют собой семейство окружностей (рис. 1.27, б), опираю-
58
щихся на базу системы как на общую хорду, причем каждому значению Гr
соответствуют две одинаковых окружности, опирающиеся на хорду с разных
сторон базы.
Определим радиус R рабочих зон. В соответствии с рис. 1.27
SinΨ Sin 2 Sin Cos
2
2
.
d
d ra
d
r
В свою очередь, Sin
, Cos a , тогда Sin 2
.
2 ra
ra 2 R R
2 2R
Подставив полученное выражение для Sin γ вместо Sin ψ в (1.68),
определим радиус рабочей зоны (как функция Гr )
R
d
2
Гr ,
(1.69)
где R – радиус окружности, являющейся границей рабочей зоны дальномерной
радионавигационной системы для Гr = Const ;
а
б
ψ
ЛПА
M0
ЛПВ
Гr2
γ
γ/2 γ/2
ra
γ
rb
Гr1
M
R
h
A
φ r
d
d
R1
h2
ЛПА
A
B
O
R2
γ
d
d
B
ЛПВ
Гr min
rmin
Rmin
Гr1
Гr2
Рис. 1.27. Рабочие зоны дальномерных РНС: а – построение рабочих зон;
б – форма рабочих зон
59
d – половина базы системы;
Гr – значение геометрического фактора.
При этом удаление центра окружности (h), являющейся границей рабочей
зоны от базы системы (рис.1.27, а),
2
2
h R d
2
2
Гr
d
Г r2 d 2 d
1 .
2
2
(1.70)
Так как минимальное значение геометрического фактора Гr min =
2 , то
рабочая зона, обеспечивающая максимальную точность определения места ВС
по двум дальномерным РНС, представляет собой окружность радиусом R min =
= d, и база системы является ее диаметром (рис. 1.27, б).
Эта
окружность
является
геометрическим
местом
точек,
где
обеспечивается наименьшая погрешность определения местоположения ВС.
При смещении с этой окружности точность снижается, и ее наихудшее значение
наблюдается на базе системы дальномерных РНС.
В общем виде можно определить значение геометрического фактора для
любой точки М пространства, координаты которой удобнее задавать удалением
r и углом φ в полярной системе координат (рис. 1.27, а) с центром в середине
базы (точка О).
Введем обозначение
r
d
, представляющее собой нормированное
расстояние. Тогда расстояние до точки М от середины базы r = ξd .
Из треугольников АОМ и ВОМ (рис. 1.27, а) по теореме косинусов
2
2
ra d r 2drCos(90 ) d (1 2Sin ) ;
2
2
2
2
rb d r 2drCos(90 ) d (1 2Sin ) ,
2
2
2
2
а из треугольника АМВ определится угол визирования базы
ra2 rb2 4 d 2
2 1
,
arccos
arccos
2
r
r
4
2
a b
1 2 Cos2
(1.71)
где d – половина базы системы;
ra , rb – расстояния от воздушного судна до радиомаяков А и В соответственно;
r – расстояния от воздушного судна до середины базы;
60
φ – полярный угол на воздушное судно;
ξ – нормированное расстояние от середины базы до точки пересечения линий
положения.
Тогда, используя выражения (1.68) и (1.71), можно определить значение
геометрического фактора Гr(ξ) для произвольной точки М пересечения линий
положения дальномерных систем в виде
Γ r ( )
1 4 2 2Сos 2
.
2Cos
(1.72)
На рис. 1.28 показана зависимость геометрического фактора Гr(ξ) от
нормированного расстояния ξ для различных значений угла φ .
Если погрешности σr определения расстояний у обоих радиомаяков равны,
то размеры осей эллипса ошибок определяются согласно (1.38) и (1.39) в виде
(знак «+» в знаменателе выражения соответствует оси a , а знак «-» – оси b)
2 2 r
1 1
.
(1.73)
2
Г r2
φ=45°
1 Cos
φ=60°
2 2 r
φ=75°
1 CosΨ
ln(1 Pмс )
φ=85°
Гr(ξ)
2 2 r
φ=0°
φ=45°
φ=60°
φ=75°
b
φ=85°
a
4,0
3,5
φ=30°
Gr0 ( R)
φ=15°
φ=0°
Gr1 ( R)
3,0
Gr2 ( R)
Gr3 ( R)
2,5
Gr4 ( R)
Gr5 ( R)
2,0( R)
Gr6
1,5
ξ
1,0
0
0,5
1,0
1,5
( R)
2,0
2,5
3,0
3,5
Рис. 1.28. Зависимость геометрического фактора Гr дальномерных систем
от нормированного расстояния ξ для различных значений угла φ
4,0
φ=45°
φ=60°
φ=75°
φ=85°
а
φ=85°
a(ξ),b(ξ)
φ=15°
φ=45°
φ=60°
φ=75°
61
10
φ=30°
b(ξ)
9,0
a6( R)
φ=15°
b 6( R)
8,0
a1( R)
b 1( R)
7,0
a2( R)
b 2( R)
6,0
a3( R)
а) b 3( R)
5,0
a4( R)
b 4( R)
4,0
a5( R)
3,0
b 5( R)
b(ξ)
a(ξ)
2,0
ξ
1,0
0
0,5
1,0
( R)
1,5
2,0
2,5
3,0
3,5
4,0
a
б
b
Гr=3
γ/2
Гr =2
γ
B
A
a
Гr=3
b
Гr =2
Гr min= 2
Рис. 1.29. Эллипсы ошибок определения места ВС дальномерными РНС:
а – зависимость размера осей эллипса от нормированного расстояния ξ для различных
полярных углов φ; б – ориентация и размеры эллипсов ошибок определения места ВС
62
На рис. 1.29 показана ориентация и размеры эллипсов ошибок определения
места ВС на рабочих зонах дальномерных РНС. Эллипсы построены для
значений σr = 1 и Pмс = 0,683 (при σr λ=1).
Размер
эллипсов,
принадлежащих
одной
границе
рабочей
зоны,
постоянен, а угол поворота таков, что направление одной из осей эллипса
совпадает с биссектрисой угла визирования γ , который является вписанным
углом и равен
2 180
1 2 ,
arcsin
arccos
Г r2
Гr
180
(1.74)
где γ – угол визирования, град;
Гr – значение геометрического фактора дальномерных РНС.
Для рабочей зоны, соответствующей значению Гr min (при ξ=1), угол
визирования γ=90° и оси эллипса a=b равны, то есть она превращается в
окружность. На больших расстояниях (при ξ>1) угол визирования γ<90°, и его
ось a меньше оси b . На малых расстояниях (при ξ<1) угол визирования γ>90°,
и у эллипса ошибок ось a становится больше оси b.
1.2.4.2. Угломерные системы
Рассмотрим два угломерных радиомаяка (рис. 1.30), разнесенных на
расстояние 2d, которое называется базой угломерной системы.
ψ
ЛПВ
M
φa
φ
ra
d
A
r
rb
φb
Построение
зон
удобнее
полярной
рабочих
вести
в
системе
координат,
центр
O
которой
совпадает
с
серединой базы, а угол φ
отсчитывается
от
перпендикуляра к ней.
d
О
ЛПА
B
Рис. 1.30. Построение рабочей зоны
угломерных РНС
Условие (1.67) для
угломерных
систем
с
учетом (1.51) будет иметь
вид
63
мсдоп
ra rb
Const ,
SinΨ
2
Г
2
(1.75)
где Гα – значение геометрического фактора угломерных систем;
ra ,rb – расстояния от местоположения ВС до радиомаяков A и B соответственно;
ψ – угол пересечения линий положения;
σα – среднеквадратическая погрешность измерения угла, рад;
σмс доп – среднеквадратическая погрешность определения места самолета, м.
Введем понятие нормированного расстояния
r
.
d
Преобразуем (1.75), выразив его в полярной системе координат.
По теореме косинусов из треугольников АОМ и ВОМ
2
2
2
2
2
ra d r 2drCos(90 ) d r 2drSin ,
2
2
2
2
2
r d r 2drCos(90 ) d r 2drSin
(1.76)
b
откуда следует, что
ra rb 2(d r ) 2d ( 1) ,
2
2
2
2
2
2
(1.77)
(d 2 r 2 )2 4d 2 r 2 Sin2 d 2 ( 2 1)2 4 2 Sin2 .
ra rb
(1.78)
Из выражения для площади треугольника АМВ
rr
dr
dr
S AMB a b SinΨ S AOM S BOM
Sin(90 )
Sin(90 ) drCos
2
2
2
получим соотношение, связывающее угол ψ пересечения ЛП и полярный угол φ:
SinΨ
2dr
Cos
ra rb
2Cos
( 1) 4 Sin
2
2
2
2
.
(1.79)
Тогда, подставив (1.77) и (1.78) в выражение (1.75) для геометрического
фактора, получим
2
2
r r 2( d r )
,
Г a b
2drCos
(1.80)
где Гα – значение геометрического фактора угломерных систем;
ra ,rb – расстояния от местоположения ВС до радиомаяков A и B соответственно;
d – половина базы системы угломерных РНС;
r – расстояние от местоположения ВС до середины базы;
φ – полярный угол.
Выражение (1.80) для геометрического фактора с учетом (1.77) и (1.78)
преобразуется к виду
64
1
Г
(d 2 r 2 ) [(d 4 r 4 ) 2d 2 r 2Cos2 ]
2drCos
d ( 1)
2
2Cos
( 1)
2
4 Sin
2
2
( 2 1)
.
(1.81)
Отсюда видно, что геометрический фактор Гα угломерных РНС имеет
размерность расстояния и зависит от величины базы 2d системы (рис. 1.31).
Выражение для приведенного геометрического фактора
Гα пр , не
зависящего от величины базы, имеет вид
2
2
( 2 1)
4 Sin мс
2
Г пр
Г
( 1)
2
180d 180 2Cos
( 1)
d
.
(1.82)
Тогда погрешность определения места из (1.49) и (1.82)
мс d Г пр ,
(1.83)
где σα° – угловая СКП определения линий положения, град.
Зависимость приведенного геометрического фактора угломерных РНС от
полярного угла φ для различных значений ξ показана на рис. 1.32.
Для построения рабочих зон угломерных РНС необходимо в соответствии
с условием (1.75) решить уравнение (1.82) относительно ξ для различных
значений углов φ при фиксированных значениях приведенного геометрического
фактора Гα пр .
Аналитическое решение уравнения (1.82) затруднительно. Его решение
можно получить, используя численные методы или графически. На рис. 1.33
Гα ,км
8008 00
d=100 км
6006 00
G1( )
G2( )
4004 00
G3( )
d=50 км
2002 00
d=10 км
0
0
90
-90
75
60
-75
45
-60
-45
30
15
-30
0
-15 0
15
30
15
45
30
60
45
75
60
90
75
90
Рис. 1.31. Зависимость геометрического фактора угломерных РНС
от полярного угла для различных значений базы системы
φ°
65
показаны графики зависимости приведенного геометрического фактора от ξ для
различных значений угла φ , рассчитанные в соответствии с выражением (1.82).
Гα пр
0,1
ξ=1,5
0,08
ξ =0,707
0,06
0,04
ξ =1
φ°
0,02
–90 –75 –60 –45 –30
–15
0
15
30
45
60
75
90
Рис. 1.32. Зависимость приведенного геометрического фактора
угломерных РНС от угла для различных значений ξ
Гα пр
φ = ±89°
φ = ±80°
φ = ±70°
φ = ±60°
0,1
0,09
Gn1( k )
φ = ±50°
Gn2( k )
0,08
Gn3( k )
φ = ±40°
φ = ±30°
φ = ±20°
φ = ±10°
F( k )
Gn4( k )
0,07
Gn5( k )
Gn6( k )
0,06
Gn7( k )
Gn8( k )
0,05
Gn9( k )
0,04
ξ
0,03
0,2
0,4
0,4
0,6
0,8
0,707
ξ 1(70°)
1
k
1,2
1,4
1,6
1,8
2
ξ 2(70°)
Рис. 1.33 Зависимость приведенного геометрического фактора
от ξ для различных значений угла φ
66
Тогда, задавшись некоторым значением приведенного геометрического
фактора (например, Гα пр = 0,04) , с графика (см. рис. 1.33), соответствующего
своему значению угла φ , снимается два значения ξ1, ξ2. Результаты определения
ξi(φ) , i=1,2
в соответствии с этим правилом для различных значений
приведенного геометрического фактора представлены в табл. 1.2 , по данным
которой далее в полярной системе координат под соответствующими углами ±φ
откладываются две точки с длиной радиус-вектора r(φ) = ξi(φ)d. Соединив эти
точки для всех φ плавной кривой (см. рис. 1.34), получим рабочую зону для
заданного значения приведенного геометрического фактора.
Рабочие зоны угломерных РНС располагаются симметрично по разные
стороны от базы системы.
Таблица 1.2
Зависимость коэффициента ξ от угла φ при различных значениях
приведенного геометрического фактора Гα пр
Гα пр
0,04
0,08
0,15
ξi(φ)
ξ1
ξ2
ξ1
ξ2
ξ1
ξ2
0°
0,37
1,25
0,17
2,22
0,08
3,26
10°
0,38
1,25
0,17
2,21
0,08
3,24
20°
0,39
1,24
0,18
2,18
0,09
3,18
30°
0,43
1,23
0,19
2,13
0,09
3,08
40°
0,47
1,21
0,19
2,04
0,11
2,93
±φ
45°
0,5
1,2
0,22
2,0
0,12
2,84
50°
0,54
1,19
0,25
1,93
0,13
2,73
60°
0,63
1,18
0,31
1,78
0,16
2,46
70°
0,75
1,14
0,43
1,59
0,24
2,12
80°
0,89
1,09
0,65
1,33
0,43
1,65
89°
0,99
1.01
0,96
1,04
0,93
1,07
В соответствии с рис. 1.33 при ξ = 1 величина приведенного геометрического
фактора не зависит от угла φ и равна
Г пр
2
180 2Cos
2 2 Sin
2
2
0,035 .
180
Это значит, что рабочая зона для этого значения Гα пр= 0,035 представляет
собой окружность (рис. 1.34) радиуса r=d с центром в середине базы
угломерных РНС.
Минимальное
значение,
равное
Гα пр min = 0,032,
приведенный
геометрический фактор имеет на перпендикуляре к середине базы (φ = 0°) при
2
0,707 , что соответствует удалению от нее на r = 0,707d . В этой точке
2
67
достигается максимальная точность определения места по двум угломерным
РНС, а угол пересечения линий положения в ней ψ = 108°.
По мере приближения к базе погрешность определения места быстро
увеличивается, а на самой базе стремится к бесконечности, что делает
невозможным определение координат ВС на ней.
Ориентация и размер эллипсов ошибок определения места ВС по двум
угломерным РНС зависят от положения точки измерения.
φ = 0°
-10°
10°
20°
-20°
30°
-30°
-40°
40°
Гα пр = 0,035
Гα пр = 0,04
-50°
50°
60°
-60°
-70°
70°
r=d
r = ξ2d
-80°
r = ξ1 d
-89°
A
89°
B
d
d
Гα пр = 0,035
ψ=108°
Рис. 1.34. Рабочие зоны угломерных РНС для заданных значений
приведенного геометрического фактора
0,707d
Гα пр = 0,08
80°
68
Размер осей эллипса ошибок определим в соответствии с (1.36) и (1.37), выразив
линейные
средние
квадратические погрешности
σ
определения линий
положения через угловые погрешности (считая последние равными: σα1 = σα2 =
σα):
σ 1 = σα r a ;
σ 2 = σα r b ,
(1.84)
где σ1 , σ2 – линейные СКП определения линий положения, м;
σα – угловая СКП определения линий положения, рад;
ra , rb – расстояния от радиомаяков до точки измерения места самолета, м .
Тогда размеры осей эллипса ошибок (знак «+» перед модулем в
знаменателе выражения соответствует оси a , а знак «–» оси b)
a
b
4ra rb
(ra2 rb2 )1
2
2ra rb
2
Sin
1 2
r r2
b
a
2 2d ( 1) 4 Sin
2
( 1)
2
2
2
2
, (1.85)
( 1) 4 Cos
2
2
2
2
где a , b – размеры осей эллипса ошибок, м;
λ – параметр, зависящий от заданной вероятности Pмс попадания места самолета
внутрь эллипса ошибок;
σα – угловая СКП определения линий положения (пеленга), рад;
ra , rb – расстояния от радиомаяков до точки измерения места самолета, м;
d – половина базы системы;
ξ – нормированное расстояние;
ψ – угол пересечения линий положения.
На рис. 1.35, а, показан график зависимости размера осей эллипса от
нормированного расстояния ξ для различных полярных углов φ угломерных
радионавигационных систем. Расчет выполнен для значений σr = 1 и Pмс = 0,683
(при σr λ=1) и d = 50.
На главном направлении φ=0. Тогда оси эллипса ошибок будут
2
2
2
2d ( 1)
r d
;
a
2
r
(1.86)
2
2
r
d
2
b 2d ( 1) 2
.
d
Отсюда видно, что при ξ=1 оси эллипса a=b равны, и он превращается в
окружность.
φ=30°
φ=20°
φ=10°
φ=50°
500
φ=60°
φ=89°
а a(ξ), b(ξ)
φ=70°
69
φ=0°
a0( k )
450
b 0( k )
b(ξ)
a1( k )
400
b1
(k)
a2( k )
350
b 2( k )
a3( k )
300
b 3( k )
φ=0°
φ=10°
φ=20°
φ=30°
φ=50°
φ=60°
φ=70°
φ=89°
a5( k )
250
b 5( k )
a6( k )
200
b 6( k )
a7( k )
b 7( k )
150
a(ξ)
a9( k )
b 9( k )
100
50
ξ
0
k
0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1 1,1 1,2 1,3 1,4 1,5 1,6 1,7 1,8 1,9 2
б
b
a
ψ
Ψ=90º
φa
a
b
φb
A
B
d
d
Рис. 1.35. Эллипсы ошибок определения места ВС угломерными РНС:
а – зависимость размера осей эллипса от нормированного расстояния ξ для различных
полярных углов φ; б – ориентация и размеры эллипсов ошибок определения места ВС
70
Поскольку угломерные РНС (см. рис. 1.30) измеряют углы φa и φb, то размеры
осей эллипса удобнее выразить через них.
По теореме синусов из треугольника AMB (рис. 1.30) получим:
2dSin b
2dSin a
ra
; rb
.
(1.87)
Sin( a b )
Sin( a b )
Тогда (1.85) с учетом (1.87) преобразуется к виду
a
b
8 d Sin a Sin b
Sin( a b ) (Sin a Sin b )1
2
2
2
2 Sin a Sin b Sin( a b )
1
2
2
Sin a Sin b
. (1.88)
Угол поворота α осей эллипса ошибок в соответствии с (1.32) будет
определяться выражением
Sin2 b Sin2 a Sin( a b )
.
tg 2 2
tg
2
2
2
Cos
(
)
a
b
ra rb
Sin a Sin b
2
2
ra rb
(1.89)
На рис. 1.35, б, показаны ориентация и размеры эллипсов ошибок
определения места ВС по отношению к базе угломерных РНС.
1.2.4.3. Угломерно-дальномерные системы
Рассмотрим угломерно-дальномерную систему, в которой оба радиомаяка
находятся в одной точке (рис. 1.8, а). При этом линии положения обоих
навигационных параметров всегда пересекаются под прямым углом ψ = 90° .
Средняя квадратическая погрешность определения местоположения ВС в
соответствии с (1.48) с учетом (1.42) и (1.43)
1
мс
SinΨ
r2
2
gr
2
2
g
r2 r 2 2 r
r
r
2
r
2
1 r 1 ,
r
,
где σr – СКП определения расстояния, м;
σα – угловая СКП определения линий положения (пеленга), рад;
gr – градиент определения расстояния;
gα – градиент определения угла, м – 1;
r – расстояние от радиомаяка до точки измерения места самолета, м;
(1.90)
(1.91)
71
ξ
–
отношение
линейных
СКП
определения линий положения (ЛПα и
ЛПr ).
Условие
постоянства
Гαr=1,41
геометрического фактора (1.67) для
угломерно-дальномерных
РНС
ξ=1
с
r
A
учетом (1.90) и (1.91) преобразуется к
Гαr=1,6
виду
Гr
мсдоп
r
ξ =1,25
1
2
Const . (1.92)
Гαr=2,24
ξ =2
Отсюда видно, что величина
геометрического
фактора
Гαr
не
Рис. 1.36. Рабочие зоны угломернодальномерных РНС
зависит от угла φ и определяется
только
значением
ξ
или
r
(для
заданных погрешностей σα и σr ) (см. рис. 1.37, а).
Таким образом, семейство изолиний геометрического фактора угломернодальномерных РНС представляет собой концентрические окружности радиуса r
с центром в точке размещения радиомаяка (рис. 1.36).
Радиус рабочей зоны определяется величинами погрешностей измерения
угла и расстояния и зависит от значения геометрического фактора (рис. 1.37, б):
r
r 180 r
2
(Гr 1 ) ,
(1.93)
где σr – СКП определения расстояния, м;
σα – угловая СКП определения линий положения (пеленга), рад;
σα° – угловая СКП определения линий положения (пеленга), град.
Размеры осей эллипсов ошибки определения места ВС угломернодальномерными РНС определим из (1.38) и (1.39), заменив угловую
погрешность определения линии пеленга на линейную величину в соответствии
с (1.84), при этом σα задается в радианах:
a 2 2 r 2 2 r 2 2r ;
b 2 2 r ,
(1.94)
72
где a , b – размеры осей эллипса ошибок, м;
λ – параметр, зависящий от заданной вероятности Pмс попадания места самолета
внутрь эллипса ошибок;
σr – СКП определения расстояния, м;
σα – угловая СКП определения линий положения (пеленга), рад.;
ξ – отношение линейных СКП определения линий положения;
r – расстояние от радиомаяка до точки измерения места самолета, м.
Ориентация и размеры эллипсов ошибок определения места ВС на
границах рабочих зон угломерно-дальномерных РНС показаны на рис. 1.38.
Таким образом, если погрешность измерения дальности не зависит от
расстояния до точки измерения, то размер оси b определяется только этой
погрешностью и постоянен.
Размер оси a при постоянной погрешности измерения угла увеличивается
пропорционально удалению от радиомаяка. При этом в соответствии с (1.32)
одна из осей эллипса всегда направлена на радиомаяк.
Равенство осей a = b в соответствии с (1.94) достигается при ξ=1, и эллипс
ошибок определения места ВС превращается в окружность.
r , км
Гrα
σr=1000м
σα=1°
300
5,5
5
4,5
4
3,5
G ( R)
3
2,5
2
1,5
1
200
σr=500м
σα=1°
R0( R)
100
σr=500м
σα=2°
σr=250м
σα=2°
0
0
1
2
( R)
а)
3
4
5
ξ
1
1,5 2
2,5 G3( R) 3,5 4
б)
4,5 5 Гrα
Рис. 1.37. Зависимость для угломерно-дальномерных систем:
а – геометрического фактора от отношения линейных СКП определения ЛП; б – радиуса
рабочей зоны от геометрического фактора
73
a
b
90°
Гαr=1,41
ξ =1
Гαr=2,24
Гαr=2,0
ξ =1,73
Гαr=1,12
ξ =0,5
r
ξ =2
Гαr=1,8
ξ =1,5
Рис. 1.38. Ориентация и размеры эллипсов ошибок определения места ВС
на границах рабочих зон угломерно-дальномерных РНС
1.2.4.4. Разностно-дальномерные системы
В разностно-дальномерных системах место ВС определяется как точка М
пересечения двух линий положения Δrab и Δrac , имеющих форму гипербол
(рис.1.39).
Базы rab и rac каждой из пар радиомаяков видны из точки местоположения
самолета под углами γab и γac (называемых также углами визирования). При этом
касательные в точке пересечения линий положения, задаваемых каждой парой
станций, являются биссектрисами углов визирования γab и γac .
Поэтому угол пересечения линий положения ЛП1 и ЛП2
ψ = 0,5(γab + γac ) = 0,5γbc .
(1.95)
Углы визирования γab и γac могут быть определены из прямоугольных
треугольников BMD1 и CMD2 в следующем виде:
rab Sin(180 )
rab Sin
tg ab
;
ra rabCos(180 ) ra rabCos
rac Sin( )
tg ac
,
ra rac Cos( )
(1.96)
74
где γab , γac – углы визирования частных баз разностно-дальномерной системы;
γbc – угол визирования общей базы;
rab , rac – длины частных баз;
ra – расстояние от ведущей станции А до точки пересечения ЛП;
φ – полярный угол на точку пересечения линий положения;
β – угол пересечения частных баз разностно-дальномерной системы.
Введем понятие нормированного расстояния
ra
rab
и коэффициента
r
rac
симметричности частных баз ab разностно-дальномерной системы.
При определении углов визирования в соответствии с (1.96) необходимо
учитывать, что при достижении углом γab или γac значения 90° тангенс имеет
разрыв и меняет знак, в то время как геометрически углы визирования
продолжают увеличиваться и превышают 90°.
C
ψ
rc
M
ε
γac /2
γbc
ε
ψ/2
γab /2
rb
γab /2
2d2 = rac
γac /2
ЛП2
D1
D2
ε
Δrac = rc – ra > 0
ra
φ
ЛП1
β
2d1 = rab
B
A
Δrab = rb – ra < 0
Рис. 1.39. Определение места воздушного судна в разностно-дальномерной системе
с совмещенными базами
75
С учетом этого углы визирования баз будут равны:
Sin
Cos
γab =
γab
Sin( )
Cos( )
γaс =
γaс
ab arctg
ac arctg
γbс =
0,5 (γab + γac)
0,5 (γab – γac)
для ξ ≥ – Cos φ
180 –| γab| для ξ < – Cos φ
°
для μξ ≥ Cos(φ–β)
180 –| γaс| для μξ < Cos(φ–β)
°
(1.97)
для φ >β или φ < 0
для 0 < φ ≤ β
В общем случае, зная параметры ξ, μ и β разностно-дальномерной
системы, можно определить по (1.97) углы визирования γab и γac для
произвольной точки M пересечения ЛП, задаваемой полярными параметрами ra
и φ.
Для этой же точки M пересечения линий положения из треугольника AMB
(рис. 1.39) по теореме синусов следует:
ra
rb
2 d1
.
Sin( ab ) Sin ab Sin(180 )
Отсюда определится разность расстояний от точки M до станций A и B:
Cos ab
2
2 d1
. (1.98)
Δrab rb ra
[Sin( ab ) Sin ] 2d1
Sin ab
ab
Cos
Аналогично из треугольника AMC (рис. 1.39) следует:
rc
ra
2d 2
Sin( ) Sin ac Sin(180
2
.
ac )
Тогда разность расстояний от точки M до станций A и C
Δrac rc ra
2d 2
[Sin( ) Sin( ac
Sin ac
Cos ac
2
)] 2d
. (1.99)
2
Cos ac
2
При неравенстве частных баз rab ≠ rac биссектриса угла γbc отклонена от
направления на ведущую станцию А на угол ε в сторону большей базы:
Ψ ab 1 ab ac ab ac ab
.
2
2
2
2
2
4
(1.100)
76
Для построения рабочей области разностно-дальномерной системы
необходимо определить, как изменяется величина геометрического фактора ГΔr
в зависимости от положения точки пересечения линий положения.
В
разностно-дальномерной
системе
сигналы
ведомых
станций
синхронизированы по времени с сигналом ведущей станции и поэтому
коррелированы между собой. При этом величина коэффициента корреляции
может быть принята ρ = 0,5.
Значение геометрического фактора для разностно-дальномерной системы
в общем виде с учетом (1.44), (1.46), (1.49) и ρ = 0,5 определяется выражением
Г Δr
1
2 SinΨ
1
2 ab
Sin
2 ab
Sin
2
1
2 ac
Sin
2
2
2 ac
bc
ab
Sin
2 Sin
CosΨ
Sin
ab
2
Sin
ac
2
Sin ab Sin ac Cos bc
2
2
2
2
2
Sin
2
Sin
ac
,
(1.101)
2
где ψ – угол пересечения линий положения ЛП1 и ЛП2 ;
γab , γac – углы визирования частных баз разностно-дальномерной системы;
γbс – угол визирования общей базы разностно-дальномерной системы.
Определим, как в зависимости от расстояния изменяется значение
геометрического фактора ГΔr системы, ведомые станции В и С которой
расположены симметрично на одинаковом расстоянии 2d от ведущей станции А
(то есть μ = 1 и ε = 0), и их частные базы пересекаются под углом β = 60° (рис.
1.40).
Задаваясь различными фиксированными значениями полярного угла φ по
(1.97), определим значения углов визирования γab и γac в зависимости от
нормированного расстояния ξ. Далее в соответствии с (1.101) вычислим
значение геометрического фактора ГΔr(ξ). График такой зависимости от
нормированного расстояния ξ для различных углов φ приведен на рис. 1.40, а.
Для построения рабочих зон разностно-дальномерных РНС необходимо в
соответствии с условием (1.67) решить уравнение (1.101) относительно ξ для
различных фиксированных значений углов φ при постоянных значениях
геометрического фактора ГΔr = const.
77
Нахождение такого решения можно получить графически. Задавшись
некоторой величиной геометрического фактора (например, ГΔr = 5), с графика
(рис. 1.40, а) для соответствующих фиксированных углов φ снимаются значения
нормированного расстояния ξ(φ) .
Далее в полярной системе координат φ и ra(φ) = ξ(φ)rab строятся рабочие
зоны разностно-дальномерных РНС для различных значений геометрического
фактора
ГΔr= const.
Вид
рабочих
зон
для
симметричной
разностно-
дальномерной системы при угле пересечения баз β = 60° показан на рис. 1.40, б.
Форма рабочих зон зависит от угла β пересечения баз. Графики
зависимости величины геометрического фактора ГΔr от нормированного
расстояния ξ и рассчитанные по ним рабочие зоны симметричных разностнодальномерных РНС (для углов пересечения баз β = 0°; β = 30° и β = 90°)
приведены на рис. 1.41–1.43. На рис. 1.44 показаны рабочие зоны для
несимметричной разностно-дальномерной системы (μ ≠ 1).
Из выражения (1.101) для геометрического фактора следует, что ГΔr → ∞
при углах визирования частных баз разностно-дальномерной системы γab = 0°
или γac = 0°, а также при угле визирования общей базы γbc = 0°. Это имеет место
на линиях продолжения частных и общей баз вне станций (при ξ > 1). Поэтому
рабочие зоны на этих направлениях отсутствуют.
В то же время, если самолет находится на линии частной базы между
станциями A и В или A и С (то есть ξ ≤ 1), то угол визирования соответствующей
базы станций (γab или γac) γ=180°, а Sin(0,5γab)=Sin(0,5γac)= Sin(0,5γ)=1, и
геометрический фактор имеет конечное значение.
При этом φ = β и угол визирования частной базы γab = γab = γ (для 0 < ξ ≤ 1)
Sin
,
Cos
() arctg
а величина геометрического фактора не превышает значения
Г Δr()
2 Cos()
.
Sin()
(1.102)
φ=-30°
φ=120°
φ=105°
φ=90°
φ=75°
10
9,5
9
G1( R)
8,5
G2( R)
8
G3( R)
7,5
G4( R
7)
G56,5
( R)
6)
G6( R
5,5
G7( R)
а)G8(5R)
4,5
G9( R)
4
G1 0( R)
3,5
G1 1( R)
3
G0( R)
2,5
2
1,5
1
0,5
0
0
φ=-45°
φ=-60°
ГΔr(ξ)
φ=30°
φ=-15°
φ=15°
а
φ=±30°
φ=45°
78
φ=60°
ξ
0,2
0,4
0,6
0,8
1
)
1,2( R1,4
1,6
1,8
б
φ=105°
φ=90°
2.5
2
k1( 2 )
2,2
2,4
2,6
φ=105°
φ=90°
ГΔr=5
ГΔr=15
φ=75°
1.5
k2( 2φ=
) 60°
ГΔr=1,5
k4( 2 )
φ=45°
φ=45°
0.5
k5( 2 )
B
k1( 1 )
φ=30°
k2( 1 )
φ=60°
r =2dξ(105°)
ГΔr=2
1
k3( 2 )
k4( 1 )
φ=120°
I ГΔr=10
φ=75°
k3( 1 )
2
ξ(105°)
ξ(-30°)
C
φ=30°
0
III
A
φ=15°
III
φ=15°
k5( 1 )
φ=0°
II
φ=-15°
ГΔr=15
φ=0°
φ=-15°
φ=-30° φ= -45° φ=-60° φ=-45° φ= -30°
Рис. 1.40. Геометрический фактор разностно-дальномерной системы при β=60°:
а – зависимость геометрического фактора от нормированного расстояния;
2 2 2 2 2 1 1 1 1 1
б – форма рабочей
зоны разностно-дальномерной системы
10
9 .5
9
G1( R)
8 .5
G2( R) 8
7 .5
G3( R)
7
G4( R)6 .5
6
G5( R)5 .5
G6( R) 5
4 .5
G7( R) 4
G8( R)3 .5
3
G9( R)
2 .5
2
1 .5
1
0 .5
0
φ=70°
φ=80°
φ=90°
φ=60°
φ=50°
φ=40°
φ=30°
φ=10°
а ГΔr(ξ)
φ=20°
79
ξ
0
0 .2
0 .4
0 .6
0 .8
1
1 .2
1 .4
1 .6
1 .8
2
2 .2
2 .4
2 .6
( R)
б
φ=70°
φ=60°
φ=50°
k135( )
k246( )
k135( 1 )
k246( 1 )
k135( 2 )
k246( 2 )
k135( 3 )
k135( 3 )
φ=80°
φ=90°
3
φ=80°
φ=70°
φ=40°
ГΔr=15
2.5
ГΔr=10
I
2
ГΔr=7
φ=30°
ГΔr=4
φ=60°
φ=50°
φ=40°
1.5
φ=30°
ГΔr1=3
φ=20°
φ=10°
φ= 0°
φ=20°
0.5
φ=10°
φ= 0°
0
B
φ= -10°
ГΔr=2
C
A
φ= -20°
φ= -20°
ГΔr=2
ГΔr=3
ГΔr=4
ГΔr=7
k246( 3 )
φ= -30°
φ= -40°
φ= -50°
φ= -60°
φ= -70°
ГΔr=10
II
ГΔr=15
φ= -10°
φ= -30°
φ= -40°
φ= -50°
φ= -60°
φ= -70°
-80°
1 1
2-90°
2 3
3-80°
3
φ=
φ=
φ=
Рис. 1.41. Геометрический фактор разностно-дальномерной системы при β=0°:
а – зависимость геометрического фактора от нормированного расстояния;
б – форма рабочей зоны разностно-дальномерной системы
φ=90°
φ=105°
φ=75°
φ=60°
φ=-60°
φ=-75°
φ=-45°
10
9,5
9
G1( R)
8,5
G2( R) 8
G3( R7,5
)
G4( R) 7
G5( R6,5
)
6
G6( R)
5,5
G7( R)
а)
G8( R)5
4,5
G9( R)
4
G1 0( R)
3,5
G1 1( R)
3
G1 2(2,5
R)
2
1,5
1
0,5
0
φ=45°
ГΔr(ξ)
φ=-15°
φ=15°
а
φ=-30°
80
φ=30°
ξ
0
0,2
0,4
0,6
б
0,8
φ=90°
φ=75°
1
1,2( R)1,4
φ=105°
2.5
I
2
φ=60°
1,6
1,8
2
2,2
2,4
2,6
φ=90°
φ=75°
ГΔr=10
φ=60°
ГΔr=7
1.5
ГΔr=4
φ= 45°
φ=45°
1
ГΔr=2
k13( 2φ=30°
)
k24( 2 )
B
k13( 1φ=15°
)
III
k24( 1 )
φ=30°
0.5
φ=0°
C
0
A
ГΔr=2
φ=15°
III
φ=0°
ГΔr=4
φ=-15°
II
ГΔr=7
ГΔr=10
φ=-30°
φ= -45°
φ=-15°
φ=-30°
φ= -45°
φ= -60° φ=-75° φ=-60°
Рис. 1.42. Геометрический фактор разностно-дальномерной системы при β=30°:
2 фактора
2 1 1от нормированного расстояния;
а – зависимость геометрического
б – форма рабочей зоны разностно-дальномерной системы
φ=135°
φ=120°
φ=45°
φ=60°
φ=75°
φ=90°
ξ
0
0,2
0,4
0,6
б
0,8
1
1,2( R1,4
)
φ=135°
φ=120°
3
ГΔr=15
2.5
φ=105°
1,6
1,8
2
B
2,6
φ=90°
1.5
ГΔr=2
1
φ=75°
2,4
φ=105°
ГΔr=4
I
2,2
φ=120°
ГΔr=10
2
φ=90°
k13( 2 )
φ=105°
10
9,5
9
G1( R)
8,5
G2( R)
8
G3( R)
7,5
G4( R)7
6,5
G5( R
)
G6( R6
)
5,5
G7( R)
G8( R5
)
4,5
G9( R)
4
G1 0( R)
3,5
G1 1( R)
3
G1 22,5
( R)
2
1,5
1
0,5
0
φ=75°
φ=45°
φ=60°
ГΔr(ξ)
φ=-30°
φ=-45°
φ=30°
а
φ=-15°
φ=15°
81
φ=75°
C
φ=60°
φ=60°
0.5
k24( 2 )
k13( 1 )
k24( 1 )
φ=45°
A
φ=30°
φ=15°
φ=0°
φ=45°
0
III
III
ГΔr=10
II
φ=30°
φ=15°
ГΔr=15
φ=-15° φ=-30° φ=-45° φ=-30° φ=-15°
φ=0°
Рис. 1.43. Геометрический фактор разностно-дальномерной системы при β=90°:
а – зависимость геометрического фактора от нормированного расстояния; б – форма
рабочей зоны разностно-дальномерной системы
2 2 1 1
82
φ=120°
φ=105°
φ=105°
3.5
φ=90°
φ=90°
ГΔr=10
3
ГΔr=8
φ=75°
ГΔr=4
2
k1( 2 )
k2( 2 )
I
φ=60°
ГΔr=2
k7( 2 )
k8( 1 )
C
1
2d2
φ=45°
k4( 1 )
k6( 1 )
φ=60°
1.5
k5( 2 )
k3( 1 )
φ=75°
2.5
φ=30°
B
φ=45°
0.5
III
2d1
III
φ=30°
0
A
φ=15°
φ=15°
ГΔr=4
k7( 2 )
ГΔr=8
φ=0°
φ=0°
ГΔr=10
φ=-15°
φ=-15°
II
φ=-30°
φ=-45°
φ=-60°
φ=-45°
φ=-30°
2 2 2 1 1 1 2 1 2
Рис. 1.44. Форма рабочей зоны несимметричной
разностно-дальномерной системы при β=60°
Величина ГΔr в соответствии с (1.97) и (1.102) зависит от угла пересечения
β и нормированного положения ξ самолета на базе (для ξ ≤ 1).
Зависимость геометрического фактора ГΔr внутри частной базы от этих
параметров приведена на рис. 1.45, а.
Для самолета, находящегося на линии общей базы между станциями В и C
(то есть ξ ≤ 1), угол визирования этой базы станций γbc = γab + γac =180° и
Sin(0,5γbc)=1, Cos(0,5γbc)=0. При этом полярный угол точек общей базы меняется
в диапазоне β ≤ φ ≤ 0,5β+90°, а угол визирования γab = γ(φ) = φ - 0,5β .
Величина геометрического фактора внутри общей базы определяется
значением полярного угла φ:
83
Г Δr()
1
.
Sin()
(1.103)
Зависимость геометрического фактора ГΔr(φ) внутри общей базы от
полярного угла φ показана на рис. 1.45, б.
Таким образом, рабочая зона разностно-дальномерной РНС при β ≠ 0°
состоит из трех областей (лепестков), ограниченных продолжениями частных
баз пар станций. В зависимости от величины угла β пересечения баз
соотношение площадей этих областей изменяется. По мере уменьшения угла β
размеры областей I и II увеличиваются, а размер и значение области III
уменьшаются. При β = 0° области I и II становятся равными (рис. 1.41), а
область III отсутствует.
Для
симметричной
разностно-дальномерной
системы
при
угле
пересечения баз β ≠ 0° рабочая зона также симметрична относительно главного
направления (см. рис. 1.40, 1.42). При угле пересечения баз β = 0° наблюдается
симметрия рабочих зон и относительно линии общей базы системы (см. рис.
1.41).
Ориентация и размер эллипсов ошибок определения места ВС в
разностно-дальномерной РНС зависят от положения точки измерения.
а
б
ГΔr(ξ)
4
φ=β=30
°
3,8
3,6
3,4
3,2
3,8
3,6
3,4
3,2
3
3
G1( R)
2,8
G2( R)
2,6
2,4
G3( R)
2,2
G4( R)
2
1,8
1,6
1,4
1,2
φ=β=45
°
φ=β=60
°
φ=β=90
ξ
1
ГΔr(φ)
4
β=30
β=45
2,8
2,6
2,4
2,2
0
0,2
0,4
0,6
( R)
0,8
1
°
°
β=60
2
°
1,8
1,6
1,4
1,2
°
β=90
1
0,8
0,8
°
30
°
50
°
70
°
90
°
110
°
Рис. 1.45. Зависимость геометрического фактора для разных значений угла β:
а – внутри частной базы от нормированного расстояния ξ ;
б – внутри общей базы от полярного угла φ
°
130
84
Размер осей эллипса ошибок определим в соответствии с (1.38) и (1.39),
считая погрешности измерения разности расстояний по каждой паре станций
равными:
σΔr1 = σΔr2 = σΔr ;
2 2 Δr
a
b
1 CosΨ
2 2 Δr
1 CosΨ
2 Δr
2 Δr
;
1 CosΨ Cos Ψ Cos bc
2
4
2 2 Δr
2 Δr 2 Δr
ln(1 Pмс )
,
Ψ
bc
1 CosΨ
Sin
Sin
2
4
ln(1 Pмс )
2 2 Δr
(1.104)
где a , b — размеры малой и большой осей эллипса ошибок;
σΔr — СКП определения разности расстояний;
λ — параметр, зависящий от заданной вероятности Pмс попадания места
самолета внутрь эллипса ошибок и определяемый в соответствии с выражением
(1.24);
ψ — угол пересечения линий положения;
γab , γac — углы визирования частных баз разностно-дальномерной системы;
γbс — угол визирования общей базы разностно-дальномерной системы.
Рассмотрим положение эллипсов ошибок на главном направлении
симметричной (μ = 1) разностно-дальномерной РНС (рис. 1.46, 1.47).
На главном направлении для области I полярный угол φ=0,5β +90°, углы
визирования частных баз в соответствии с (1.97) равны и зависят только от
нормированного расстояния ξ до точки измерения:
Cos( / 2 )
ab ac () arctg
.
Sin( / 2 )
(1.105)
Для разностно-дальномерной РНС с углом пересечения баз β = 60° на
расстоянии ξ =1 (для области I) углы визирования γab = γab = ψ = 60°, и оси
эллипса ошибок a =2,31; b = 4 (для σΔr λ =1). Так как угол пересечения линий
положения ψ <90°, то с его биссектрисой совпадает большая ось b эллипса. Сама
биссектриса совпадает с главным направлением.
85
При увеличении расстояния (для ξ >1) углы γab и γab уменьшаются и,
следовательно, ось b увеличивается, а ось a уменьшается.
При уменьшении расстояния (для ξ <1) происходит обратное изменение
осей эллипса.
В точке, находящейся на главном направлении на удалении ξ=0,5 от
ведущей станции А, углы визирования γab = γab = ψ = 90°. При этом оси эллипса
a b 2 2 (для σΔr λ =1), и он превращается в окружность. При дальнейшем
уменьшении расстояния на интервале 0 <ξ <0,5 угол пересечения линий
положения ψ >90°, и с биссектрисой совпадает уже малая ось a эллипса.
Для области II главному направлению соответствует угол φ=0,5β –90°,
поэтому в соответствии (1.97) углы визирования частных баз
Cos( / 2 )
.
Sin( / 2 )
ab ac () arctg
(1.106)
При этом на главном направлении угол пересечения ЛП ψ <90° для всех
удалений от ведущей станции А. Поэтому с биссектрисой угла ψ совпадает
большая ось b эллипса ошибок.
Рассмотрим, как изменятся параметры эллипса ошибок в случае смещения
точки М пересечения линий положения от главного направления (для угла
пересечения баз β = 60°).
Если точка пересечения линий положения находится на окружности
радиусом ra (то есть ξ = 1), то угол визирования общей базы γbc = γab + γac =2ψ =
const для всех точек окружности в силу того, что он является вписанным в нее
углом, опирающимся на общую дугу BC . Величина вписанного угла равна
половине длины этой дуги.
При этом для области I величина дуги (на которую опирается вписанный
угол γ ) BC 180 . Поэтому для всех точек этой окружности размеры
bc
осей эллипса будут одинаковы: a =2,31 и b = 4 (для σΔr λ =1).
86
а
φ=105°
φ=90°
8
φ=75°
φ=45°
a(ξ) , b(ξ)
φ=120°
7,5
7
a1( R)
φ=-60°
φ=-30°
b 1( R)
6,5
a2( R)
b 2( R)
6
a3( R)
b
b 3( R)
a4( R)
5,5
b 4( R)
φ=30°
a5( R)
5
b 5( R)
b
a6( R)
4,5
b 6( R)
φ=45°
a9( R)
b 9( R)
4
a1 1( R)
b 11( R)
3
2,5
φ=120°
φ=105°
φ=90°
3,5
φ=60°
φ=75°
φ=60°
a
ξ
2
( R)
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1 1,1 1,2 1,3 1,4 1,5 1,6 1,7 1,8 1,9 2
φ=45°
φ=30°
φ=-30° ; -60°
φ=120° φ=105°
φ=90°
б
φ=75°
φ=60°
φ=45°
φ=30°
ε
φ=15°
φ=0°
b
φ= -15°
a
φ= -45°
φ= -30°
φ= -60°
Рис. 1.46. Эллипсы ошибок определения места ВС разностно-дальномерной РНС:
а – зависимость размера осей эллипса от нормированного расстояния ξ для различных
полярных углов φ; б – ориентация и размеры эллипсов ошибок определения места ВС при β=60°
5,6
5,4
5,2
5
4,8
4,6
4,4
4,2
4
3,8
3,6
3,4
3,2
3
2,8
2,6
2,4
2,2
2
φ=90°
a(ξ) , b(ξ)
φ=5°
а
φ=30°
87
5 .6
5 .4
5 .2
b
5
4 .8
a1( R)
b 1( R)4 .6
a2( R)
b 2( R)4 .4
φ=75° ; 90°
φ=60°
φ=45°
a3( R)
4 .2
b 3( R)
a4( R)
4
b 4( R)
a5( R) 3 .8
b 5( R)
3 .6
a6( R)
b 6( R)3 .4
φ=30°
a7( R)
φ=15°
φ=5°
φ=15°
φ=5°
b 7( R)3 .2
3
2 .8
2 .6
2 .4
a
2 .2
2
0
0 .1
0 .2
0 .3
0
0,1
0,2
0,3
0 .4
0 .5
0,4 0,5
0 .6
0,6
0 .7
0 .8
ξ
0 .9
1
1 .1
1 .2
1 .3
1 .4
1 .5
0,7 0,8
0,9
1
1,1
1,2
1,3
1,4
1,5
φ=90°
φ=75°
( R)
φ=30°
φ=45°
φ=60°
φ=75° ; 90°
φ=60°
φ=45°
б
φ=30°
φ=15°
ε
φ=0°
φ= -15°
φ= -30°
b
a
φ= -45°
φ= -60°
φ= -90° φ= -75°
Рис. 1.47. Эллипсы ошибок определения места ВС разностно-дальномерной РНС:
а – зависимость размера осей эллипса от нормированного расстояния ξ для различных
полярных углов φ; б – ориентация и размеры эллипсов ошибок определения места ВС при β=0°
88
Для областей II и III величина дуги, на которую опирается вписанный
угол γbc , BC 180 . В соответствии с этим размеры осей эллипса для
всех точек этой окружности будут постоянны: a =2,07 и b = 7,73 (для σΔr λ =1).
Большая ось b эллипса, совпадающая с биссектрисой угла ψ, будет
повернута на угол ε в сторону главного направления относительно полярного
угла φ. Величина угла ε определяется выражением (1.100).
Если точка пересечения ЛП перемещается вдоль общей базы внутри
системы, то угол ее визирования γbc = γab + γac =2ψ = const = 180°. Поэтому для
всех точек этой линии размеры обеих осей эллипса будут одинаковы:
a b 2 2 (для σΔr λ =1). Эллипс ошибок представлять собой окружность.
Для точки M пересечения линий положения, находящейся на продолжении
общей базы вне системы, углы визирования частных баз: γab = γac . При этом угол
визирования общей базы γbc = γab – γac = 0 , вследствие чего на продолжении
общей базы размер большой оси эллипса b → ∞, и рабочие зоны в этом
направлении имеют разрыв (рис. 1.40, 1.42).
Размер
произвольного
осей
эллипса
положения
ошибок
точки
M
разностно-дальномерной
пересечения
ЛП
РНС
для
определяется
в
соответствии с выражением (1.104).
Зависимость размера осей эллипса от нормированного расстояния ξ для
различных полярных углов φ при углах пересечения баз β = 60° и β = 0°
приведена на рис. 1.46, а и 1.47, а соответственно. Ориентация и размер
эллипсов ошибок разностно-дальномерной РНС для этих углов пересечения баз
показан на рис. 1.46, б и 1.47, б.
В соответствии с этими рисунками размер малой оси a слабо зависит от
расстояния. Размер большой оси b при этом изменяется в зависимости от
расстояния в большом диапазоне (вплоть до бесконечности при углах ψ → 0).
Наименьшая погрешность определения местопроложения разностнодальномерной системы обеспечивается на ее главном направлении.
89
На нем γab = γaс = γ(ξ) и Ψ=0,5γbс = 0,5(γab + γaс) = γ(ξ). Тогда из выражения
(1.101) после проведения
тригонометрических преобразований получим
значение геометрического фактора на главном направлении:
Г Δr()
2 Cos()
,
2 Sin()Sin(() / 2)
(1.107)
где ГΔr(ξ) — значение геометрического фактора на главном направлении;
γ(ξ) — угол визирования частных баз, определяемый в соответствии с (1.97).
Величина геометрического фактора ГΔr(ξ) изменяется вдоль главного
направления в зависимости от удаления от ведущей станции, сначала
уменьшаясь до ГΔr min , а затем увеличиваясь.
Минимальное значение геометрического фактора Г Δrmin
1
1,5
0,81649
достигается в точке главного направления, из которой углы визирования
частных баз γ(ξ)= 120°. В зависимости от угла β пересечения частных баз точка
наилучшей точности будет находиться на разном удалении от ведущей станции
(но всегда внутри треугольника, образованного станциями).
90
2. МЕТОДЫ ИЗМЕРЕНИЯ
НАВИГАЦИОННЫХ ПАРАМЕТРОВ
Для определения местоположения ВС необходимо знание навигационных
параметров (расстояние, разность расстояний, угол), которые определенной
функциональной
зависимостью
(называемой
навигационной
функцией)
связаны с измеряемыми координатами объекта [14].
Радионавигационные
и
радиолокационные
системы
излучают
и
принимают радиосигналы, а значит, непосредственно измеряться могут только
параметры этих радиосигналов. Поэтому для определения навигационных
параметров необходимо выявить их функциональную зависимость (если она
есть) от того или иного параметра радиосигнала и в соответствии с этой
зависимостью осуществлять пересчет измеренного параметра радиосигнала в
искомый навигационный параметр.
Параметрами непрерывного радиосигнала являются амплитуда U0, частота
f0 и фаза φ = ωt. Импульсный сигнал дополнительно описывается длительностью
τи и периодом повторения Tп. При распространении из одной точки пространства
в другую сигналы характеризуются также временем запаздывания tЗ. Если
радиосигнал
модулирован,
то
модулирующий
сигнал
описывается
аналогичными параметрами модуляции.
При распространении сигнала в пространстве из одной точки в другую его
параметры претерпевают изменения, которые зависят от многих факторов, в том
числе от взаимного расположения РНС и ВС (то есть от их координат в
пространстве). Кроме того, на них влияют различные помехи, являющиеся
мешающим
параметров.
фактором,
препятствующим
определению
навигационных
91
2.1. Измерение расстояний
Практически все параметры радиосигнала (за исключением длительности
и периода повторения) зависят от пройденного им пути, а значит, могут
использоваться для измерения расстояния.
Амплитуда сигнала быстро уменьшается с расстоянием (в соответствии с
уравнением радиолокации). Однако использовать ее для измерения расстояния
возможно, но затруднительно в связи с тем, что на амплитуду влияет много
мешающих
факторов
(затухание
в
метеообразованиях,
рассеивание,
посторонние помехи и др.), которые делают такие измерения очень неточными.
Поэтому амплитудные методы измерения расстояния в авиации применения не
нашли.
Время прохождения сигналом некоторого расстояния в силу постоянства
скорости распространения электромагнитного колебания пропорционально
дальности, поэтому широко используется временной метод ее измерения.
Фаза
сигнала
φ = ωt
непосредственно
связана
со
временем
и,
следовательно, может служить мерой расстояния. Поэтому фазовый метод
измерения расстояния существует и используется.
Несущая
частота
радиосигнала
непосредственно
от
расстояния,
пройденного им, не зависит (хотя из-за эффекта Доплера зависит от изменения
расстояния), однако частотный метод измерения расстояния существует. В этом
методе вводится искусственная зависимость частоты от времени путем
частотной модуляции излучаемого сигнала.
При временнóм методе измерения расстояния используются импульсные
сигналы, так как с их помощью легче и точнее определяются моменты времени
и обеспечивается хорошая разрешающая способность по дальности.
При
частотном
и
фазовом
методах,
как
правило,
применяются
непрерывные сигналы. Однако при этом отсутствует или очень низка
разрешающая способность по расстоянию.
Таким образом, все методы измерения расстояния основаны либо на
непосредственном (временнóй метод), либо на косвенном (фазовый и частотный
методы) измерении времени распространения сигнала (через измерение
изменения его фазы или частоты).
92
2.1.1. Временной (импульсный) метод
Этим методом осуществляется измерение непосредственно времени
запаздывания (распространения) сигнала на некоторое расстояние.
По виду измеряемого параметра сигнала метод называется временным, а
по виду используемого сигнала – импульсным.
Различают
две
разновидности
временного
метода:
запросный
и
беззапросный. Разница между ними заключается в том, что измерение времени
(расстояния) запросным методом осуществляется на том конце радиолинии
связи, где сигнал излучается и принимается. При беззапросном методе
излучение сигнала происходит на одном конце радиолинии, а прием и
измерении времени (расстояния) – на другом. Эта разница обусловливает и
различие достоинств и недостатков запросного и беззапросного методов.
2.1.1.1.Запросный метод
При запросном методе (рис. 2.1) измеряется временной интервал между
излученным и принятым обратно импульсами. Под принятым импульсом
подразумевается и отраженный от объекта сигнал и сигнал, специально
сформированный ответчиком объекта.
Излученный
импульс
Принятый
импульс:
отраженный ответный
Запросчик
(радиолокатор)
t
τи
Ответчик
(объект)
2R
tЗ = c
T0
T0
t
R
c
R
c
Рис. 2.1. Запросный метод измерения расстояния
93
Считая, что электромагнитное колебание распространяется прямолинейно
с постоянной скоростью, можно определить время прохождения сигнала до
объекта и обратно:
tз
2R
T0 ,
c
(2.1)
где tЗ – время запаздывания сигнала;
R – расстояние до объекта;
c – скорость распространения электромагнитной волны;
T0
– время обработки сигнала в ответчике (T0 = 0, если используется
отраженный сигнал).
Отсюда измеряемое расстояние
R
c
(t T0 ) .
2 з
(2.2)
Минимальное измеряемое время запаздывания сигнала (как видно на
рис. 2.1) не может быть менее длительности импульса τи , то есть tЗ ≥ τи , иначе
излученный и принятый сигналы наложатся друг на друга по времени, и будет
невозможно определить момент окончания временного интервала.
Поэтому минимальное измеряемое запросным методом расстояние
c
Rmin и .
2
(2.3)
Аналогично максимальное однозначно измеряемое время запаздывания
сигнала не должно быть более периода повторения Tп излучаемых импульсов, то
есть tЗ ≤ Tп, иначе за момент начала отсчета временного интервала будет принят
следующий излученный импульс.
Максимальное однозначно измеряемое запросным методом расстояние
Rmax
c
T .
2 п
(2.4)
Если принимаются сигналы двух объектов, то для их раздельного
наблюдения необходимо, чтобы они не накладывались друг на друга по
времени, иначе они будут восприниматься как один объект. То есть разность
времен их задержки должна быть не менее длительности импульса
94
t з1 t з 2
2
2
2
2
R1 R2 ( R1 R2 ) ΔR и ,
с
с
c
с
что определяет разрешающую способность по дальности запросного метода
c
ΔRmin и .
2
(2.5)
Структурная схема радиолокатора с пассивным ответом (первичного
радиолокатора), использующего отраженный от объекта сигнал, приведена на
рис. 2.2, а.
а
Синхронизатор
Передатчик
Антенный
переключатель
А
Измеритель
времени
Приемник
измеритель
времени
дешифратор
б
шифратор
передатчик
приемник
Запросчик
Tкз
t
АЗ1
fз
АО1
R
ответчик
Приемник
Дешифратор
АЗ2
Tко
fо
АО2
2
Передатчик
Ограничитель
загрузки, ЛЗ
Шифратор
Рис. 2.2. Структурная схема: а – первичного радиолокатора;
б – запросного дальномера (вторичного радиолокатора)
t
95
Синхронизацию всех процессов по времени в радиолокаторе осуществляет
синхронизатор, который одновременно запускает передатчик для формирования
излученного сигнала и включает начало отсчета измерителем времени.
Заканчивается отсчет временного интервала в момент прихода сигнала,
принятого приемником. Так как в радиолокаторе используется одна приемопередающая антенна, тракты приема и передачи разделяются во времени
антенным переключателем.
Дальность до объекта определяется в соответствии с (2.2) при T0 = 0 .
Радиосистема с активным ответом (вторичный радиолокатор) в качестве
принятого сигнала использует ответный сигнал, сформированный ответчиком.
Структурная схема такого радиолокатора показана на рис. 2.2, б. При этом
запросчик, который измеряет расстояние до ответчика, может находиться либо
на земле, либо на борту ВС. В первом случае такая система является наземным
вторичным радиолокатором, а во втором – это бортовой радиодальномер.
Передатчик запросчика запускается сигналом измерителя времени,
который в данном случае выполняет также роль синхронизатора. Сигнал
передатчика излучается передающей антенной АЗ1 на частоте fз запросного
канала и поступает на приемник ответчика через приемную антенну АО1 с
задержкой R/c .
Принятый приемником сигнал обрабатывается и запускает передатчик
ответчика. Обработка сигнала в ответчике занимает некоторое время T0.
Ответный сигнал через передающую антенну АО2 на частоте fо по каналу ответа
поступает на приемную антенну АЗ2 запросчика с задержкой R/c .
Сигнал с выхода приемника запросчика подается на измеритель времени,
заканчивая отсчет временного интервала. Начало отсчета измеряемого
временного интервала совпадает с излучением запросного сигнала и задается
самим измерителем.
Расстояние до объекта в радиосистеме с активным ответом определяется в
соответствии с (2.2) при T0 ≠ 0 .
96
В запросном и ответном канале для повышения помехоустойчивости за
счет исключения срабатывания ответчика по случайному принятому импульсу
осуществляется кодирование излучаемых сигналов в виде группы из двух или
трех импульсов с определенным временным интервалом внутри группы.
Сигналы в каналах запроса и ответа отличаются величиной кодовых
интервалов Tкз , Tко и несущей частотой fз , fо .
При нахождении в зоне действия ответчика большого количества
запросчиков его энергетический ресурс может не позволить ответить на все
поступившие запросы. Для исключения перегрузки передатчика ответчика
служит ограничитель загрузки, который запрещает прохождение запросных
сигналов на запуск передатчика либо закрывая его на некоторое время после
прохождения предыдущего запроса, либо отсеивая лишние запросные сигналы
от удаленных запросчиков, селектируя их по уровню.
Таким образом, запросному методу с использованием ответного сигнала
присуще ограничение пропускной способности, не позволяющее обслуживать
неограниченное число запросчиков.
Для возможности измерения сколь угодно малых расстояний в ответчике
введена искусственная задержка T0 сигнала с помощью линии задержки (ЛЗ),
что увеличивает измеряемый интервал времени, необходимый для срабатывания
измерителя времени в запросчике.
Достоинствами запросного метода измерения расстояния являются:
высокая точность;
простота технической реализации.
Недостатки запросного метода:
ограничение пропускной способности в случае, если используется
ответный сигнал;
трудность измерения малых расстояний, если в качестве принятого
сигнала используется сигнал отраженный.
97
2.1.1.2. Беззапросный метод
Временной интервал, пропорциональный расстоянию (рис. 2.3), с
помощью беззапросного метода измеряется на приемной стороне радиолинии в
момент прихода сигнала. Начало этого временного интервала определяется
заранее заданным моментом времени, который с высокой точностью по времени
должен совпадать с моментом излучения сигнала на передающей стороне
радиолинии.
Задание моментов излучения сигнала и начала отсчета осуществляется
эталонами времени (частоты), которые определяют так называемые шкалы
времени на передающей и приемной сторонах (см. рис. 2.4).
Естественно, что шкалы времени должны совпадать, иначе появляется
ошибка в измерении временного интервала, вызванная рассогласованием Δtшв
шкал времени.
Таким образом, при беззапросном методе измеряется интервал времени
tЗ = tЗИ – Δtшв = Ř / c ,
Излученный
импульс
(2.6)
Передатчик
Принятый
импульс
t
Приемник
Δtшв
Начало
отсчета
τи
t
tЗ
R
tЗИ = c
Рис. 2.3. Беззапросный метод измерения расстояния
98
который может не совпадать с истинным интервалом tЗИ распространения
сигнала из-за сдвига Δtшв шкал времени. При этом Δtшв может иметь и
положительный, и отрицательный знак.
В результате этого измеряется так называемая квазидальность. Под
квазидальностью Ř понимается измеренная дальность, отличающаяся от
истинной дальности R на постоянную (за время измерения) величину Ď:
Ř=R+Ď;
(2.7)
Ď = cΔtшв ,
где c – скорость распространения электромагнитной волны;
Δtшв – расхождение шкал времени излучателя и приемника;
Ď – ошибка измерения расстояния за счет расхождения шкал времени.
Структурная схема беззапросного дальномера показана на рис. 2.4.
В качестве эталонов времени (частоты) используются высокостабильные
генераторы колебаний.
Беззапросный метод измерения расстояния используется в спутниковых
системах ГЛОНАСС и GPS. Стабильность частоты эталона времени на спутнике
-
составляет 10 13. Сколь бы ни была мала нестабильность эталона времени, она
через некоторый достаточно большой промежуток времени приведет к
заметному уходу шкал времени. Поэтому эталоны времени спутников
периодически сверяются и корректируются по более точному эталону, каковым
в спутниковых системах является системный эталон наземного контрольно-
измерительного комплекса с нестабильность 10 14, который, в свою очередь,
синхронизирован с всемирным координированным временем (UTC).
Передатчик
Приемник
А1
Эталон
времени
f
А2
R
Измеритель
времени
Эталон
времени
Рис. 2.4. Структурная схема беззапросного дальномера
99
Достоинством беззапросного метода измерения расстояния является отсутствие
ограничения по пропускной способности, так как для его реализации не
требуется ответчик, и все пользователи, принимающие сигнал, могут определять
свое удаление.
Недостатком беззапросного метода является необходимость очень точной
синхронизации шкал времени на приемной и передающей сторонах, что
технически выполнить достаточно сложно.
2.1.2. Частотный метод
При частотном методе расстояние определяется путем измерения
разностной частоты излучаемого и принимаемого в текущий момент времени
сигналов.
Для этого в направлении объекта излучается непрерывный частотномодулированный сигнал. Его вид при двойном пилообразном законе изменения
частоты во времени показан на рис. 2.5.
Сигнал, распространяющийся до объекта и обратно к приемнику, будет
иметь задержку по времени tЗ = R/c. За это время мгновенное значение
излучаемого сигнала изменится, что приведет к появлению в текущий момент
времени разности частот между ними fр = fизл - fпр, которая зависит от
пройденного сигналом расстояния до объекта и обратно. Таким образом,
измеряя разностную частоту fр , можно определить расстояние до объекта.
Частота излучаемого сигнала для двойного пилообразного закона
модуляции (рис. 2.5, а)
f изл (t ) f min kt при 0 t 0,5T ;
м
fизл (t ) f max kt при 0,5T t T ;
k
4 f
,
Tм
где k – скорость изменения частоты, Гц/с ;
Δf – девиация частоты;
Tм – период модуляции.
м
м
(2.8)
100
Частота принимаемого сигнала изменяется по такому же закону, но будет
запаздывать по времени на величину tЗ , определяемую в соответствии с (2.1)
при T0 = 0 .
f пр (t ) f min k (t t з ) при 0 t 0,5T ;
м
(2.9)
f пр (t ) f max k (t t з ) при 0,5T t T .
м
м
Тогда разностная частота
f р fизл (t ) f пр (t ) ktз
8 Δf
R.
cTм
(2.10)
а
Излученный
сигнал
f0
fmin
fр2
f0
f
fmax
t
fр1
2Δf
fизл (t)
fпр1 (t)
fпр2 (t)
fпр3 (t)
f0
tз1
tз2
tз max
б
Tм /2
│fр│
t
Tм
2Δf
fр3
fр ср1
fр ср2
tз1
tз2
зона
обращения
fр ср3
t
fр1
fр2
Рис. 2.5. Частотный метод измерения расстояния:
а – двойной пилообразный закон изменения частоты излученного и принятого
сигнала и вид излученного сигнала; б – закон изменения разностной частоты
двойного пилообразного сигнала
101
При этом на интервале 0 < t < 0,5Tм значение разностной частоты
положительно (fр > 0), а на интервале 0,5Tм < t < Tм – отрицательно (fр < 0),
что говорит о ее противофазности на этих интервалах. Значение разностной
частоты определяется выражением (2.10), откуда искомое расстояние
R
cTм
f .
8 Δf р
(2.11)
Применяются и другие законы частотной модуляции излучаемого сигнала,
например односторонний пилообразный или гармонический.
При одностороннем пилообразном законе частотной модуляции (рис. 2.6)
искомое расстояние определяется выражением
R
cTм
f .
4 Δf р
(2.12)
а
Излученный
сигнал
t
f
fmax
fр
2Δf
fизл (t)
fпр (t)
fро
fmin
tз=
б
2R
c
t
Tм
│fр│
tз
fр
fро
t
Рис. 2.6. Частотный метод измерения расстояния:
а – одинарный пилообразный закон изменения частоты излученного и принятого
сигнала и вид излученного сигнала; б – закон изменения разностной частоты
одинарного пилообразного сигнала
102
Генератор
упр. сигнала
Структурная схема частотного
Анализатор
частоты
дальномера приведена на рис. 2.7.
fр = fизл - fпр
Fм
Частотный
модулятор
Фильтр fр
Разностная
частота
представляет собой частоту биений,
которая образуется в приемнике при
Передатчик
fизл(t)
fизл(t)
Смеситель
сложении
принимаемого
fпр(t)
излучаемого
сигналов.
А1
А2
разностная
R
частота
и
Далее
выделяется
фильтром и поступает на анализатор
частоты (частотомер). Анализатор
Рис. 2.7. Структурная схема частотного
дальномера
частоты обычно представляет собой
счетчик,
подсчитывающий
количество положительных полуволн частоты биений за период модуляции Tм.
Значение разностной частоты fр постоянно в пределах периода Tм, за
исключением участков перегиба закона модуляции частоты сигналов (рис.
2.5, б, и 2.6, б), длительность которых равна tЗ . Интервалы времени, в течение
которых разностная частота не остается постоянной, называются зонами
обращения. Если fр не остается постоянной за период Tм , то частотомер будет
измерять некоторое среднее значение разностной частоты fр ср .
Определим
среднее
значение
разностной
частоты
для
двойного
пилообразного закона частотной модуляции при наличии зон обращения. На
рис. 2.5, б, показан закон изменения разностной частоты от времени для
различных значений времени запаздывания. На рисунке видно, что среднее
значение
разностной
частоты
равно
высоте
прямоугольника
(без
зон
обращения), равновеликого площади огибающей частоты биений, которая имеет
форму трапеции, то есть
f р Tм Tм
T
t з f рср м ,
2 2
2
2
откуда
103
t
f рср f р 1 з ,
Tм
(2.13)
где fр ср – средняя частота биений за период модуляции;
fр – истинная частота биений, определяемая расстоянием;
Tм – период модуляции излучаемого сигнала;
tз – время запаздывания сигнала.
Чем больше величина задержки tз, тем больше отличается среднее
значение fр ср от истинного fр , а значит, тем больше ошибка измерения
расстояния.
Зависимость отношения fр ср / fр для разных значений отношения tз / Tм
показана на рис. 2.8.
Предельное значение задержки не должно превышать половины периода
модуляции tз max ≤ Tм /2 , которой соответствует максимальное значение fр =2Δf
(рис. 2.5, б). Отсюда максимальное измеряемое расстояние
Rmax
cTм
.
4
(2.14)
fр ср /fр
1,0
0,9
0,8
0,7
0,6
tз /Tм
0,3
0,4
0,5
0,2
0,15
0,09
0,1
0,08
0,07
0,06
0,05
0,5
Рис. 2.8. Зависимость отклонения средней за период модуляции частоты биения
от истинного значения для различного времени задержки
104
Рисунок 2.8 показывает, что для tз max = Tм /2 будет измерена средняя
разностная частота fр ср = 0,5 fр = Δf . Тогда в соответствии с (2.10)
f рср Δf
8 ΔfRmax
;
cTм
Rmax
cTм
.
8
(2.15)
При сравнении (2.14) и (2.15) видно, что результаты измерения будут
занижены в 2 раза относительно реального расстояния. Это объясняется
двукратным
занижением
измеренного
значения
средней
частоты
fр ср
относительно реального значения разностной частоты fр .
Для уменьшения воздействия зон обращения на результаты измерения
необходимо, чтобы задержка сигнала была много меньше периода модуляции
(tз << Tм), тогда их влиянием можно пренебречь и считать, что fр ср = fр .
Из (2.13) следует, что для получения ошибки измерения расстояния не
более 1 % из-за отличия средней частоты от истинной необходимо, чтобы
задержка была tз ≤ 0,01 Tм .
Таким образом, максимальное измеряемое частотным методом расстояние
должно определяться исходя из допустимой ошибки (2.13). Оно оказывается
много меньше, чем задается выражением (2.15). Поэтому частотный метод
используется в измерителях малых расстояний, например в радиовысотомерах
малых высот, максимальная измеряемая высота у которых обычно не превышает
одного километра.
Минимальное значение разностной частоты, которое может измерить
счетный анализатор частоты, соответствует случаю, когда в период модуляции
Tм укладывается одна полная положительная полуволна частоты биений, то
есть fр
min =1/Tм.
Подставив это значение в (2.11), получим значение
минимального измеряемого частотным методом расстояния
Rmin
c
.
8 Δf
(2.16)
105
Такое же выражение определяет и дискретность ΔR измерения расстояния
погрешность).
(методическую
Действительно,
результаты
измерения
не
изменятся, пока количество положительных полуволн разностной частоты за
период модуляции не изменится на единицу. То есть частота биений должна
быть кратна частоте модуляции Fм = 1/Tм , отсюда
ΔR
c
.
8 Δf
(2.17)
Достоинством частотного метода является возможность измерения малых
расстояний, что предопределяет использование его в радиовысотомерах малых
высот.
Основным
недостатком
частотного
метода
является
отсутствие
разрешающей способности по дальности, то есть радиовысотомер хорошо
измеряет расстояние до одного объекта. Если сигналы отражаются от двух
объектов с разными удалениями, то они будут интерферировать друг с другом.
В
этом
случае
суммарный
сигнал
затруднительно
разделить
на две
составляющие от различных объектов, что приведет к ошибочным измерениям.
Если частоты биений от каждого из объектов различаются достаточно сильно,
то возможно их раздельное измерение. Для этого используется многоканальный
анализатор частоты. На входе каждого канала должен стоять узкополосный
перестраиваемый фильтр, выделяющий только одну из разностных частот.
В
целом
поверхность
земли,
до
которой
измеряет
расстояние
радиовысотомер, можно рассматривать как один объект. Однако, если земная
поверхность
сильно
изрезана,
то
показания
радиовысотомера
будут
соответствовать некоторому усредненному значению. Кроме того, существуют
так называемые слоистые поверхности (лед на поверхности воды, снег на
земной поверхности), у которых отражение сигнала происходит от каждого из
слоев [19]. Это тоже приводит к ошибочным измерениям.
Еще одним недостатком частотного метода является влияние частоты
Доплера на результаты измерений при маневрировании самолета по высоте.
106
2.1.3. Фазовый метод
Метод основан на измерении разности фаз излучаемого и принимаемого
сигналов (рис.2.9.а.), которая зависит от времени прохождения ими некоторого
расстояния.
Излучаемый непрерывный гармонический сигнал имеет вид
uизл (t ) U излCos(t o ) ,
где Uизл – амплитуда излучаемого сигнала;
ω – угловая частота;
φо – начальная фаза.
Принимаемый сигнал будет иметь задержку по времени
V
uпр (t ) U пр Cos (t t з ) o Ψ r t ,
(2.18)
где Uпр – амплитуда принятого сигнала Uпр << Uизл ;
ψ – изменение фазы колебаний при отражении;
tз – время запаздывания;
Vr – радиальная скорость;
λ – длина волны.
а
б
uизл(t)
А1
u(t)
uпр(t)
А2
uизл(t) u (t)
пр
t
Передатчик
Приемник
2R
tз = c
Фазометр
Рис. 2.9. Фазовый метод измерения расстояния:
а – излучаемый и принимаемый сигналы; б – структурная схема
фазового дальномера с измерением на несущей частоте
107
Тогда разность фаз Δφ между этими сигналами
Δ t з Ψ
Vr
t .
(2.19)
Учитывая, что изменение фазы при отражении ψ = π, и пренебрегая
эффектом Доплера, окончательно получим
Δ t з
2 R 4f
4
R
R,
c
c
(2.20)
откуда искомая дальность
R
c
Δ
Δ .
2
4
(2.21)
Фаза является периодическим параметром, поэтому разность фаз может
принимать значения Δφ = 2kπ + Δθ ; k = 0, 1 ,2 , . . (где Δθ – разность фаз,
измеренная фазометром).
Периодичность фазы приводит к неоднозначности измерений, если нет
возможности определить количество k полных периодов изменения фазы.
Обычно определить k не удается.
Тогда однозначное измерение расстояния возможно только в пределах
первого периода фазы (k = 0, Δθ ≤ 2π), то есть дальность однозначного
измерения
Rодн
Δ .
4
2
(2.22)
Зона, в пределах которой изменение расстояния приводит к изменению
фазы на величину 2π, называется фазовой дорожкой. Ширина фазовой дорожки
составляет λ /2 .
Фазовый метод измерения обладает высокой точностью (хотя и
неоднозначен) в силу того, что технически погрешность измерения фазы
удается сделать очень небольшой. Погрешность измерения фазы современными
º
º
фазометрами не превышает σφ ≤ 0,5 – 1 .
Если фазометр измеряет разность фаз с погрешностью σφ , то погрешность
определения расстояния σR определяется:
R
.
4
(2.23)
108
Сравнение (2.22) и (2.23) показывает, что существует противоречие между
однозначностью и точностью измерения расстояния. Для увеличения зоны
однозначного измерения расстояния (ширины фазовой дорожки) необходимо в
соответствии с (2.20) увеличивать длину волны λ. Для уменьшения же
погрешности требуется в соответствии с (2.21) длину волны уменьшать.
Однако
при
укорочении
длины
волны
становится
невозможным
пренебрегать влиянием эффекта Доплера. Поэтому дальномерные системы,
использующие фазовый метод, работают в длинноволновом диапазоне.
Уменьшение неоднозначности возможно при проведении фазовых
измерений на частоте модуляции. Структурная схема такого дальномера
приведена на рис. 2.10.
Запросчик излучает непрерывное колебание на частоте fз , которое
модулируется по амплитуде опорным сигналом низкой частоты Fм от генератора
низкой частоты (ГНЧ). Приемник ответчика выделяет модулирующий сигнал
этой частоты из принятого колебания и, в свою очередь, модулирует им по
амплитуде излучаемый
на
частоте
fо
ответный
сигнал,
принимаемый
приемником запросчика, на выходе которого выделяется сигнал частоты
модуляции Fм . Далее фазометр сравнивает фазы опорного колебания от ГНЧ и
принятого колебания от приемника.
Запросчик
Ответчик
Передатчик
ГНЧ
Fм
Фазометр
Fм
АО1
АЗ1
Амплитудный
модулятор
Приемник
fЗ
fЗ
ГВЧ
ГВЧ
R
fо
Fм
Приемник
АЗ2
fо
АО2
Амплитудный
модулятор
Передатчик
Рис. 2.10. Структурная схема фазового дальномера
с измерением на частоте модуляции
Fм
109
За время прохождения сигнала от запросчика до ответчика и обратно фаза
модулирующего
колебания
приобретет
отставание,
пропорциональное
удвоенному расстоянию R между ними.
Считая, что изменения фазы колебаний ψ при прохождении сигнала в
ответчике не происходит, получим разность фаз Δφ сигналов, измеренную
фазометром,
Δ
4Fм
4
R
R ,
с
м
(2.24)
где R – расстояние между запросчиком и ответчиком;
Fм – частота модулирующего колебания;
λм – длина волны модулирующего колебания.
Отсюда видно, что дальность однозначного измерения определяется
длиной волны λм модулирующего колебания. Выбирая ее достаточно большой,
можно добиться снижения неоднозначности измерения расстояний. Так, при
частоте модуляции Fм = 100 Гц ширина фазовой дорожки Rодн = λм /2 = 1500 км.
Использование
непрерывных
колебаний
при
фазовых
измерениях
приводит к тому, что можно измерить расстояние только до одного ответчика.
Неограниченную пропускную способность обеспечивает фазовый метод
измерения с хранением опорной фазы. Структурная схема такого фазового
дальномера приведена на рис. 2.11.
Передатчик
f
φ
Эталон
частоты
Приемник
А1
f
А2
R
fпр φпр
Фазометр
f
φоп
Эталон
частоты
Рис. 2.11. Структурная схема фазового дальномера
с хранением опорной фазы
110
Передатчик излучает высокостабильные колебания, частота f и фаза φ
которых
определяется
описывается
эталоном
выражением
(2.18),
частоты
в
(времени).
котором
ψ = 0,
Принятый
сигнал
и
может
tз = R/c,
присутствовать доплеровский сдвиг частоты из-за взаимного перемещения
передатчика и приемника.
Фазометр измеряет разность фаз между принятым и опорным сигналом,
задаваемым местным эталоном частоты (времени).
Разность фаз между ними
Δ пр оп t з Δ шв Ω Д t
R
V
Δ шв r t ;
с
(2.25)
Δφшв =Δωt ,
где Δφшв – погрешность синхронизации эталонов частоты (времени);
Δω – отклонение частоты местного эталона от номинального значения;
ΩД – доплеровская частота;
Vr – радиальная скорость;
λ – длина волны.
Если доплеровский сдвиг частоты отсутствует, то искомое расстояние
определится в виде
R
c
c
t .
(2.26)
Отсюда следует, что для обеспечения высокой точности измерения
требуется жесткая синхронизация эталонов частоты (времени) на излучающей и
приемной сторонах.
Этот метод фазовых измерений расстояния реализован в спутниковых
системах навигации ГЛОНАСС и GPS, в которых обеспечивается требуемая
точность синхронизации.
2.2. Измерение разности расстояний
Разностно-дальномерные радионавигационные системы – это системы,
навигационным параметром которых является разность расстояний Δr = ra – rb
111
от
подвижного
объекта
до
двух
разнесенных
в
пространстве
радионавигационных точек с известными координатами.
Причем при измеренном значении разности расстояний Δr сами
расстояния ra и rb остаются неизвестными. То есть одному значению Δr
соответствует бесчисленное множество комбинаций ra и rb. Совокупность этих
комбинаций создает на поверхности Земли линию положения (ЛП) для Δr =
Const в виде гиперболы (рис. 1.5).
В пространстве образуется поверхность
положения в виде гиперболоида, полученного путем вращения гиперболы
вокруг линии, соединяющей радионавигационные точки (базы системы).
Для измерения разности расстояний используются такие же параметры
радиосигналов,
как
и
для
измерения
расстояний,
а
именно
время
распространения сигнала и фаза сигнала (разность фаз). Поэтому существуют
временной (импульсный) и фазовый методы измерения разности расстояний, а
также комбинированный импульсно-фазовый метод.
Все три метода нашли применение в радионавигации.
На временном методе основан принцип действия системы «Loran-A».
Фазовый метод используется в системах «Decca» и «Omega». Импульснофазовый метод реализован в системах «Loran-C» (США) и «Чайка» (Россия).
Все эти радионавигационные системы являются системами дальнего
действия. Для получения большого радиуса действия в них применяются
мириаметровые,
километровые
распространяются
на
очень
и
гектаметровые
большие
расстояния
волны,
которые
поверхностными
и
пространственными волнами.
Использование этих диапазонов волн требует больших мощностей
непрерывного излучения и длительностей передаваемых импульсных сигналов
(около секунды в системе «Omega»), а также больших по размерам и сложных
по конструкции антенн.
В настоящее время стали применяться многопозиционные системы
наблюдения (МПСН), позволяющие определять координаты воздушных судов и
наземного транспорта на поверхности аэродрома. В этих системах измеряется
112
разность расстояний от ВС до нескольких наземных станций. Но, в отличие от
навигационных систем типа «Loran-A», источником сигнала в них является
самолет, а наземные станции осуществляют его прием.
2.2.1. Временной (импульсный) метод
Метод основан на измерении интервала времени между двумя принятыми
радиоимпульсами,
излученными
радиопередающими
станциями,
которые
расположены в опорных радионавигационных точках (РНТ) с известными
координатами.
Для измерения одной разности расстояний необходимо иметь две опорные
радионавигационные точки (рис. 2.12).
а
б
TП
r'a
τИ
А
в
rab
ra
rab
c
T0
TЗ
ВС
t
rb
г
B
t
ra
rb
c
c
r'b
t
tизм
Рис. 2.12. Временной метод измерения разности расстояний:
а – взаимное расположение радиомаяков и ВС; б – сигнал, излученный ведущей
станцией A ; в – сигналы принятый и переизлученный ведомой станцией B;
г – сигналы, принятые на ВС
113
Работа этих радиопередающих устройств должна быть синхронизирована
по времени. В данном случае такая синхронизация осуществляется путем
привязки момента излучения сигнала одной из станций (называемой ведомой) к
моменту получения ею сигнала от другой — ведущей станции. При этом сигнал
на ВС от ведомой станции всегда будет приходить после сигнала от ведущей
станции.
Ведущая станция излучает радиоимпульсы с периодом повторения TП
(рис. 2.12, б). Они принимаются на самолете (рис. 2.12, г) и ведомой станцией
(рис. 2.12, в) со временами запаздывания, пропорциональными их удалению ra и
rab от ведущей станции.
Ведомая станция излучает свой сигнал с задержкой TЗ относительно
момента приема ею сигнала ведущей станции (рис. 2.12, в). Сигнал ведомой
станции также принимается на ВС с задержкой, пропорциональной расстоянию
rb до него (рис. 2.12, г).
Таким образом, на самолете принимаются два радиоимпульса, временной
интервал между которыми
1
tизм rab cTЗ (rb ra ) ,
c
Δr
(2.27)
где ra , rb – расстояния от ВС до ведущей и ведомой станций;
rab – расстояние между станциями (база системы);
TЗ – время задержки излучения ведомой станцией;
c – скорость света.
Отсюда искомая разность расстояний
r
Δr c tизм ab TЗ ctизм cT0 .
c
(2.28)
В зависимости от пространственного положения ВС и станций (рис.
2.12, а) будет меняться величина tизм . Задержка излучения сигнала TЗ ведомой
станцией вводится, чтобы величина tизм никогда не была равна нулю. Для этого
TЗ должно быть не менее длительности импульса TЗ ≥ τи . Общая задержка
излучения сигнала ведомой станцией относительно ведущей составляет
114
r
T0 ab TЗ .
c
(2.29)
Минимальное значение временного интервала tизм будет иметь место на
продолжении базы за ведомой станцией B (при ra' = rab + rb' )
tизм min = TЗ .
В свою очередь, на продолжении базы за ведущей станцией A (где rb' =
rab + ra') будет иметь место максимальное значение измеряемого временного
интервала между импульсами двух станций, принятых на самолете,
r
tизмmax 2 ab T0 .
c
(2.30)
При этом гиперболы, соответствующие значениям Δrmin и Δrmax,
вырождаются в прямые, совпадающие с продолжением базы за ведомой и
ведущей станциями (рис. 2.13).
Δβ
y5( x)
y6( x)
y7( x)
ya5( x)
ya6( x)
β
ΔRmax=2rab + cTз
ΔRmin= cTз
x
A
B
x
l
ya6( x)
ya5( x)
y7( x)
y6( x)
rab
ΔRmin +6rab /4
ΔRmin + rab /4
y5( x)
ΔRmin +7rab /4
ΔRmin +2rab /4
ΔRmin +5rab /4
ΔRmin +3rab /4
ΔRmin + rab
Рис. 2.13. Семейство линий положения импульсной (временной)
разностно-дальномерной системы
115
На рис. 2.13 показано семейство линий положения импульсной разностнодальномерной системы, построенное с шагом 0,25rab . Каждому значению Δr
соответствует свое значение tизм.
Расстояние между соседними гиперболами на базе системы равно
половине шага, то есть в данном случае l = 0,125rab .
Это расстояние должно быть не меньше величины lmin ≥ cδt (где δt –
погрешность измерения временного интервала).
Отсюда количество гипербол, укладывающихся на базе rab ,
N ЛП
rab
1 .
c t
По мере удаления от базы системы расстояние между гиперболами
увеличивается, что приводит к снижению точности измерения разности
расстояний.
Достоинствами временного разностно-дальномерного метода являются:
высокая точность измерений;
неограниченная пропускная способность;
отсутствие неоднозначности измерений.
К недостаткам этого метода относятся сложность реализации и
необходимость поддержания стабильности задержки излучаемых ведомой
станцией сигналов.
Этот
метод
измерения
разности
расстояний
реализован
в
радионавигационной системе «Loran-A». Цепочки станций состоят из ведущей и
двух или трех ведомых станций. Все станции одной цепочки излучают сигналы
на одной несущей частоте, являющейся признаком данной цепочки. Для работы
радионавигационной системы «Loran-A» выделены частоты 1750, 1800, 1850,
1900 и 1950 кГц. Разные пары станций одной цепочки излучают импульсы
длительностью τи около 40 мкс с разным периодом повторения TП , что позволяет
опознавать эти станции.
Дальность действия радионавигационной системы «Loran-A» достигает
1500 км.
116
2.2.2. Фазовый метод
Метод основан на измерении разности расстояний от места приема
сигналов до двух радионавигационных точек с известными координатами путем
измерения разности фаз этих сигналов.
Принцип измерения разности расстояний заключается в следующем.
В
радионавигационных
расположены
точках,
радиопередающие
разнесенных
устройства,
на
расстояние
излучающие
rab,
непрерывные
высокостабильные колебания с одинаковой частотой ω.
Фазы излучаемых колебаний
φa = ωt ;
φb = ωt + α ,
(2.31)
где α – начальный сдвиг фаз между колебаниями передатчиков.
Фазы этих сигналов в точке приема:
r
c
aпр t a ;
(2.32)
r
c
bпр t b ,
где ra , rb – расстояние от радионавигационных точек до точки приема.
Тогда разность фаз принятых сигналов
Δ b
a
пр
ΔΨ Δ
пр
c
(r
ra ) ;
b
c
Δr
Δr
2
(2.33)
Δr ,
откуда искомая разность расстояний
Δr
c
ΔΨ
ΔΨ ,
2
(2.34)
где λ – длина волны излучаемых колебаний.
Из выражения (2.34) следует, что среднеквадратическая погрешность
измерения разности расстояний
Δr
,
2 Ψ
(2.35)
117
где σΨ – среднеквадратическая погрешность измерения разности фаз.
В силу того, что фаза является параметром периодическим, разность фаз
ΔΨ может принимать значения
ΔΨ = 2πk + ΔΘ ; k = 0, 1, 2, . . . . ,
где ΔΘ – разность фаз, измеренная фазометром;
k – количество полных периодов фазы.
Поэтому возникает неоднозначность измерения разности расстояний Δr .
Подставив в (2.34) ΔΨ = 2π (для k = 1), получим интервал однозначного
измерения разности расстояний
Δrодн = λ .
(2.36)
Для того чтобы однозначно измерять большие значения разности
расстояний, превышающие значение Δrодн, необходимо иметь возможность
подсчета количества k полных периодов фазы.
Семейство линий положения, характеризующихся постоянством значения
Δr = const, представляет собой набор гипербол (см. рис. 2.14). Каждому
значению Δr соответствует свое значение ΔΨ . На этом рисунке гиперболы
построены с шагом 2π . Две соседние гиперболы, отличающиеся по разности фаз
на 2π, делят рабочую область фазовой разностно-дальномерной системы на
зоны. Каждая такая зона называется фазовой дорожкой, и в ее пределах
разность фаз изменяется в диапазоне от 0 до 2π .
Ширина фазовой дорожки на базе системы l = λ /2. Тогда на всей базе
уложится фазовых дорожек
r
2r
NФД ab ab .
l
(2.37)
На примере, изображенном на рис. 2.14, размер базы rab = 8λ .
Внутри одной фазовой дорожки может поместиться линий положения
(ЛП) не более
nЛП
2
Ψ
,
где δΨ – погрешность измерения разности фаз.
(2.38)
Δr =4λ
Δr =3λ
Δr =2λ
Δr = -λ
Δr =0
Δr =λ
Δr = -2λ
Δr= -5λ
Δr = -3λ
Δr = -4λ
118
Δr=5λ
y2( x)
Δr=6λ
Δr= -6λy5( x)
y3( x)
rab
y6( x)
Δr=7λ
y4( x)
Δr= -7λy7( x)
y1( x)
Δr= -8λ
Δψ= -16π
x
l
x
A
B
Δr=8λ
Δψ=16π
y1( x)
Δψ=14π
y7( x)
Δψ= -14π
y4( x)
y6( x)
y3( x)
Δψ=12π
y5( x)
Δψ= -12π
Δψ =8π
Δψ =6π
Δψ =4π
Δψ=10π
Δψ =2π
Δψ = -2π
Δψ =0
Δψ = -4π
Δψ = -6π
Δψ= -10π
Δψ = -8π
y2( x)
Рис. 2.14. Семейство линий положения фазовой
разностно-дальномерной системы
Тогда наибольшее число линий положения на базе фазовой разностнодальномерной системы
N ЛП NФД nЛП
4
Ψ
rab .
(2.39)
Ширина фазовой дорожки минимальна на базе системы. По мере удаления
от нее она увеличивается, причем чем дальше от перпендикуляра к середине
базы (линии положения нулевой разности расстояний), тем шире дорожка. При
этом ее ширина
l
,
2 Sin( 2 )
где γ – угол визирования станций из точки измерения (рис. 1.9).
(2.40)
119
Поэтому наилучшая точность определения Δr достигается вблизи
перпендикуляра через середину базы (главного направления).
Анализ выражений (2.35) и (2.36) показывает, что для увеличения
точности измерения Δr необходимо уменьшать длину волны λ , но при этом
уменьшается дальность однозначного измерения Δrодн.
Достоинства фазового метода измерения разности расстояний:
высокая точность измерений;
неограниченная пропускная способность.
Однако фазовому методу присущи следующие недостатки:
неоднозначность измерения, вызванная периодичностью фазы;
необходимость разделения на приемной стороне сигналов обеих станций,
что усложняет реализацию метода.
Если, как сказано в начале, станции излучают непрерывный сигнал на
одинаковой частоте, то разделить их на приемной стороне невозможно, а
следовательно, невозможно измерить разность фаз между ними.
Поэтому для разделения сигналов разных станций применяются частотная
или временная их селекция. В первом случае станции излучают непрерывный
сигнал на разных несущих частотах. Во втором – несущая частота может быть
одинаковой для обеих станций, но излучаются ими импульсные сигналы.
2.2.2.1. Фазовая разностно-дальномерная система
с частотным разделением каналов
При частотном разделении каналов ведущая и ведомая станции [21]
излучают непрерывные сигналы, частоты которых находятся в следующих
соотношениях:
a m
;
b n
a k
,
c m
где ωа – частота излучения ведущей станции;
ωb , ωc – частоты излучения ведомых станций;
k, m, n – простые целые числа (2, 3, 4, . . . ).
(2.41)
120
Когерентность сигналов всех станций системы достигается за счет того,
что сигналы ведомых станций создаются из принятого сигнала ведущей станции
путем его преобразования (трансформации) по частоте (рис. 2.15).
Для этого принятый сигнал частоты ωa с помощью последовательного
деления на m и умножения на n приводится к заданной частоте ωb= ωa n/m.
Строгое поддержание заданного значения частоты ωb достигается с помощью
фазовой автоподстройки, регулирующий коэффициент умножения на n в цепи
преобразования частоты сигнала.
Ведущая
станция A
Ведомая станция C
ПРД
ωa
ωa
Ведомая станция B
Умножитель на n
rac
nωa
Фазовый
детектор
Управл.
схема
Умножитель на m
Uупр
rab
ПРМ
ωa
Делитель
на m
ra
ωc= ωa m/k
rb
Умножитель на n
rc
ωb= ωa n/m
Бортовой приемо-индикатор
Фильтр
ωc
ПРМ
Фильтр
Фильтр
Умножитель на m
ωb
ωb
ωa , ωb , ωc
ωc
Умножитель на k
Δraс
nωa
ωa
Умножитель на m
Умножитель на n
nωa
Фазометр
mω a
mω a
ωa
Фазометр
Δrab
Рис. 2.15. Структурная схема фазовой разностно-дальномерной системы
с частотным разделением каналов
ПРД
ωb
121
Фазы сигналов, излученных ведущей станцией A и принятых на самолете
и ведомой станции B, соответственно
aизл at ;
r
c
ВСa a t a ;
(2.42)
r
c
bпр a t ab .
Фаза сигнала, излученного ведомой станцией B после преобразования
частоты,
bизл
n rab
t
.
m a
c
(2.43)
Сигнал ведомой станции B, принятый на борту ВС, будет иметь фазу
ВСb
r
n
r
a t ab b .
m
c
c
(2.44)
b
В приемо-индикаторе принятые сигналы ведущей A и ведомой B станций
разделяются фильтрами и проходят через умножители: с коэффициентом
умножения n для сигнала ведущей станции и коэффициентом m для сигнала
ведомой станции B.
Фазы этих сигналов после умножения частоты станут:
r
c
a n a t a ;
r
c
(2.45)
r
c
b mb t ab b .
Соответственно разность фаз между ними
Δ ab a b
n a
n a
(
rb ra )
rab
c
c
Δrab
,
(2.46)
ab const
отсюда получается искомая разность расстояний Δrab от ВС до станций A и B
Δrab
a
( Δ ab ab ) a ΔΨ ab ,
2n
2n
(2.47)
122
где λa – длина волны ведущей станции A;
φab – постоянный набег фазы на базе станций A и B;
ΔΨab – измеренная разность фаз между сигналами станций A и B.
Аналогично разность фаз сигналов ведущей и второй ведомой станции C
Δ ac a c
m a
m a
rc ra
rac ,
c
c
Δrac
(2.48)
ac const
откуда разность расстояний Δraс от ВС до станций A и C
Δrac
a
( Δ ac ac ) a ΔΨ ac ,
2m
2m
(2.49)
где φaс – постоянный набег фазы на базе станций A и C;
ΔΨaс – измеренная разность фаз между сигналами станций A и C.
Таким образом, бортовой приемоиндикатор определяет две разности
расстояний Δrab и Δraс относительно двух баз rab и rac , образованных ведущей
A и двумя ведомыми станциями B и C (рис. 1.9). Точка пересечения
соответствующих гипербол определяет место самолета.
Рассмотренный метод лежит в основе радионавигационной системы
«Decca», работающей в диапазоне 70-130 кГц и обеспечивающей дальность
действия до 1500 км.
2.2.2.2. Фазовая разностно-дальномерная система
с временным разделением каналов
При временном разделении каналов все станции излучают импульсные
сигналы на одной несущей частоте, но каждая из них излучает сигнал в свое
временное окно. Это позволяет на приемной стороне разделять сигналы разных
станций по времени их появления.
Этот метод используется в фазовой разностно-дальномерной системе
«Omega» [11], обеспечивающей глобальную зону действия.
123
Система состоит из восьми наземных передающих станций, имеющих
обозначения A, B, C, . . . , H и излучающих сигналы на частоте f0 =10,2 кГц
(λ=29,41 км). Длина баз между станциями в системе «Omega» достигает 9–10
тыс. км.
Временная последовательность излучения сигналов станциями показана
на рис. 2.16.
Каждая станция излучает сигнал строго определенной длительности,
приблизительно 1 с. Сигналы разных станций разделены временной паузой Tп =
0,2 с. Наличие этой паузы обеспечивает в любой точке зоны действия системы
одновременное присутствие только сигнала одной из станций. Длительность
одного цикла излучения всеми станциями составляет Tц =10 с.
Когерентность излучения всех станций по частоте и синхронизация по
времени
(см.
рис.
2.17,
а)
обеспечивается
использованием
на
высокостабильных атомных стандартов частоты (нестабильность 10
них
-1
),
привязанных к международному стандарту времени. В силу этого станции
системы «Omega» не делятся на ведущие и ведомые. Измерение разности
расстояний может осуществляться по любой паре станций.
Станции размещены по поверхности Земли таким образом, что углы
пересечения изолиний разности расстояний (гипербол) везде составляют не
°
менее 60 .
Разность фаз между сигналами любых двух станций ΔΨij измеряется на
частоте f0 =10,2 кГц и связана с разностью расстояний в соответствии с (2.33):
0,9
1,0
1,1
1,2
1,1
0,9
1,2
1,0
Tц =10 с
A
B
C
D
E
F
G
H
A
t
0,2
0,2
0,2
0,2
0,2
0,2
0,2
0,2
Рис. 2.16. Временная последовательность излучения сигналов
фазовой разностно-дальномерной системы «Omega»
124
ΔΨ ij 2k ΔΘ
2
Δrij
2f0
Δrij ,
c
0
0
Δrij
ΔΨ ij ;
2
i , j = A, B, C, . . . , H ; k = 1, 2, . . . . ,
(2.50)
где f0 – основная несущая частота сигнала;
λ0 – длина волны;
Δrij – разность расстояний от точки измерения до станций i и j;
ΔΘ – разность фаз, измеренная фазометром;
k – количество полных периодов фазы.
Для измерения разности фаз сигналов двух станций необходимо их
одновременное наличие, а они приходят на приемник в свое временное окно.
Поэтому в приемнике необходимо их запоминание на весь цикл (Tц =10 с)
действия системы. Это осуществляется в приемоиндикаторах в специальных
когерентных гетеродинах (рис. 2.17, б, в).
а
2,3
0,9
A
1,1
С
t
1
f0
ra
c
ΔΨac
2πf0
ΔΘ
2πf0
б
t
в
rс
c
t
Рис. 2.17. Измерение разности фаз сигналов наземных станций фазовой
разностно-дальномерной системы «Omega»: а – излучение когерентных сигналов
наземными станциями А и С; б – прием и запоминание фазы сигнала станции А
на борту ВС; в – прием и запоминание фазы сигнала станции С на борту ВС
125
Ширина фазовой дорожки на базе системы равна половине длины волны,
что для частоты f0 =10,2 кГц (λ ≈ 30 км) составляет приблизительно 15 км.
В то же время длина базы может составлять 9–10 тыс. км, что создает на ней в
соответствии с (2.37) до 600–700 фазовых дорожек.
Уменьшение неоднозначности измерений требует увеличивать длину
волны.
Дальнейшее
ее
увеличение
затруднительно
ввиду
технических
сложностей реализации, так как требует существенного повышения мощности
излучаемых колебаний и увеличения размеров антенн.
В
радионавигационной
системе
«Omega»
для
уменьшения
неоднозначности измерений используются дополнительные частоты излучения
(большие, чем f0 ), определяемые выражением
1
f n f0 1 n ,
K
(2.51)
где K – коэффициент сопряжения сеток изолиний;
n – число ступеней устранения неоднозначности.
В системе «Omega» приняты значения K =3 и n = 1, 2, что определяет
дополнительные частоты излучения
f1 =13,6 кГц (λ ≈ 22 км);
f2 =11,33 кГц (λ ≈ 26,5 км).
В приемоиндикаторе из сигналов дополнительных частот формируются
колебания разностных частот:
F1 = f1 – f0 = f0 /3 = 3,4 кГц (λ ≈ 90 км);
F2 = f2 – f0 = f0 /9 = 1,13 кГц (λ ≈ 270 км),
на которых выполняется «грубое» измерение разности фаз
ΔΨ 1
2
2
( f1 f0 ) Δr
Δr ;
c
30
2
2
ΔΨ 2
( f 2 f0 ) Δr
Δr .
c
90
(2.52)
Таким образом, ширина «точной» фазовой дорожки на базе системы
составляет l0 ≈15 км, а «грубых» дорожек соответственно l1 ≈45 км и l2 ≈135 км.
Следовательно, заранее зная место самолета с погрешностью не более 67,5 км,
126
можно устранить неоднозначность точных измерений, проводя измерения
последовательно на частотах F2 , F1 и f0 . В дальнейшем при точных измерениях
необходимо отслеживать число полных периодов изменения фазы.
Сигналы дополнительных
частот излучаются каждой
станцией
в
соответствующие временные окна. Полная временная последовательность
работы всех станций системы «Omega» показана на рис. 2.18.
1,0
1,2
f2
0,9
f1
1,1
1,1
f0
1,2
1,0
A
0,9
Tц =10 с
t
B
f0
f1
f2
t
C
f0
f1
f2
t
D
f0
f1
f2
t
E
f0
f1
f2
t
F
f0
f1
f2
t
G
f2
f0
f1
t
H
f1
f2
f0
t
0,2
0,2
0,2
0,2
0,2
0,2
0,2
0,2
Рис. 2.18. Временная последовательность и распределение частот излучения сигналов
всеми станциями фазовой разностно-дальномерной системы «Omega»
127
При этом в любое временное окно приемоиндикатор принимает сигналы
на трех частотах ( f0 , f1 и f3 ) от трех разных станций.
Для опознавания станций используются различия в длительности и
частоте излучаемых сигналов. Из всех 24 излучаемых системой за полный цикл
сигналов (рис. 2.18) только две станции имеют одинаковую комбинацию
длительности
и
несущей
частоты.
Например,
сигнал
на
частоте
f0
длительностью 0,9 с излучают только станции A и F, а длительностью 1,1 с –
только станции C и E. Но между собой станции каждой пары различаются
последовательностью чередования длительности излучаемых сигналов. Так,
например, станция A излучает последовательность импульсов длительностью
0,9 .. 1,0 и 1,1 с , а станция F – длительностью 0,9 .. 1,2 и 1,0 с.
2.2.3. Импульсно-фазовый метод
Этот метод, основаный на измерениях интервала времени между
принятыми импульсными сигналами двух наземных станций и разности фаз
высокочастотного заполнения этих сигналов, является комбинированным и
совмещает в себе достоинства временного (однозначность определения) и
фазового (высокая точность измерения) методов.
Принцип
действия
временного
канала,
позволяющего
грубо,
но
однозначно измерять разность расстояний до ведущей и ведомой станций из
точки приема их сигналов (рис. 2.12), рассмотрен в разделе 2.2.1.
Искомая разность расстояний определяется выражением (2.28), а
временной интервал между импульсами станций, принятыми на борту ВС,
1
tизм Δr (rab cTз ) .
c
cT0 const
Точные измерения осуществляются фазовым методом на несущей частоте
по разности фаз сигналов ведущей и ведомой станций. Несущая частота обеих
станций одинакова, поэтому используется временное разделение сигналов.
128
В соответствии с (2.50) точное, но неоднозначное значение разности
расстояний
Δr
н
ΔΘ kн ;
2
(2.53)
k = 1, 2, . . . . ,
где λн – длина волны несущего колебания;
ΔΘ – разность фаз, измеренная фазометром.
Для разрешения неоднозначности фазовых измерений погрешность
определения Δr временным методом не должна превышать ширину фазовой
дорожки, то есть
Δr c t
н
2
;
н
T
t
н ,
2c 2
(2.54)
где δΔr – погрешность измерения разности расстояний;
δt – погрешность измерения временного интервала;
Tн – период повторения несущих колебаний.
На импульсно-фазовом методе основан принцип действия систем дальней
навигации «Loran -C» (США) и «Чайка» (Россия). Цепочки наземных станций
этих систем состоят из ведущей и Nс ведомых станций, которых может быть от
двух до четырех.
Временная синхронизация работы всей цепочки и когерентность
колебаний несущей частоты осуществляются по сигналам ведущей станции.
Среднеквадратические погрешности синхронизации при этом не должны
превышать 100 нс. В настоящее время такая синхронизация может выполняться
также по сигналам глобальной навигационной спутниковой системы (ГНСС) с
погрешностью не более 30 нс.
Все станции цепочки излучают на несущей частоте fн =100 кГц пачки из
восьми навигационных импульсов (рис. 2.19). Период следования импульсов в
пачке составляет 1000 мкс.
129
Ведущая станция
Ведомые
2 мс
1 мс
станции
Ведущая станция
t
TВ1
TВ2
TЦ
Рис. 2.19. Временная последовательность излучения сигналов импульснофазовой разностно-дальномерной системы «Loran-C»
Ведущая станция излучает также дополнительный импульс, отстоящий от
последнего навигационного на 2000 мкс. Он используется для опознавания
сигналов ведущей станции и совпадает с моментом времени, когда секундные
метки внутренней шкалы времени ведущей станции и внешней синхронизации
по сигналам ГНСС совпадают.
Ведомые станции излучают свои пачки импульсов после приема сигналов
ведущей станции (рис. 2.19). Таким образом, временная задержка TВ их
излучения определяется в соответствии с (2.29). Она зависит от длины базы
пары станций rab и некоторой дополнительной задержки TЗ , необходимой для
того, чтобы в любой точке рабочей зоны системы пачки импульсов разных
станций не совпадали по времени (обычно TЗ составляет 1000–2000 мкс).
Все станции цепочки используют один и тот же период TЦ повторения
пачек импульсов. Минимальное значение периода TЦmin повторения пачек
цепочки
TЦmin
l
( N c 1)TЗ ,
c
(2.55)
где l – длина замкнутой линии, соединяющей точки размещения станций
цепочки в порядке очередности их излучения;
Nс – количество ведомых станций в цепочке;
TЗ – дополнительная задержка;
с – скорость света.
130
Конкретная величина периода повторения (в микросекундах) выбирается
из диапазона возможных значений, определяемого выражением
TЦ = 100(N – n);
(2.56)
N = 500, 600, . . . ,1000;
n = 0, 1, . . . , 7.
Численное значение периода TЦ повторения сигналов каждой цепочки
уникально и используется для ее опознавания.
Использование пачки импульсов (а не одиночного импульса, как в «LoranА») повышает среднюю излучаемую мощность, что приводит к увеличению
дальности действия системы. В то же время достаточно короткая длительность
каждого импульса позволяет отделять (по времени прихода) в приемнике
сигнал, распространяющийся поверхностной волной, от сигнала, однократно
отраженного от ионосферы (распространяющегося пространственной волной).
Однако при этом возникает вероятность наложения многократно
отраженного
от
ионосферы
предыдущего
импульса
на
последующий
поверхностный импульс пачки. Устранение влияния предыдущих задержанных
импульсов на последующие достигается применением их фазового кодирования
в пачке. Для этого в определенной последовательности (табл. 2.1) изменяется на
противоположную фаза несущей частоты импульсов в пачках. Кодовая
последовательность состоит из 16 элементов (импульсов), то есть занимает две
последовательные пачки импульсов.
Таблица 2.1
Кодовая последовательность φк фазового кодирования пачек импульсов
радионавигационной системы «Loran-C»
Пачка импульсов
Первая
Станция
Вторая
1
2
3
4
5
6
Элемент кода
7 8 9 10
Ведущая
0
0
π
π
0
π
0
π
0
Ведомая
0
0
0
0
0
π
π
0
0
11
12
13
14
15
16
π
π
0
0
0
0
0
π
0
π
0
0
π
π
131
Фазовое
кодирование
пачек
импульсов
используется
также
для
автоматического поиска и опознавания сигналов ведущей и ведомых станций.
Форма огибающей u0(t) каждого радиоимпульса в пачке может быть
аппроксимирована выражением
u0 (t ) U m0 e
t
(1 Cos Ω t ) ,
(2.57)
где Um0 – максимальная амплитуда огибающей;
α , Ω – коэффициенты аппроксимации (для РСДН-4 α =1,0 ∙10 4 с – 1;
Ω = 6,3 ∙10 4 с – 1 ).
Радиоимпульсы, излучаемые станциями радионавигационной системы
«Loran-C», имеют вид, показанный на рис. 2.20, а, и описываются выражением
u(t ) u0 (t )Sin2f н к ,
(2.58)
где u0(t) – амплитуда огибающей;
fн – несущая частота (fн = 100 кГц);
φк – значение фазового кода (может принимать значение 0 или π).
Длительность импульса в системе «Loran-C» составляет 100–135 мкс.
Длительность переднего фронта между уровнями 0,1–0,9 – приблизительно
tф ≈ 28 мкс. Длительность спада импульса может регулироваться с целью
получения требуемой ширины спектра сигнала.
Пространственная волна по отношению к поверхностной проходит
большее расстояние, что приводит к запаздыванию ее по времени и фазе.
Пространственная волна, однократно отраженная от ионосферы, приобретает
задержку относительно поверхностной на 40–50 мкс. Поэтому все измерения
необходимо проводить на начальном участке фронта принятого импульса,
свободного от влияния пространственной волны.
За точку отсчета (ТО) временных и фазовых измерений в системе «LoranC» принята точка, отстоящая от начала импульса на 30 мкс (рис. 2.20, а). Она
соответствует моменту положительного перехода через ноль после третьего
периода колебаний несущей частоты сигнала. Наличие шумов в принятом
сигнале затрудняет определение ТО на несущей частоте. Поэтому точку отсчета
определяют
по
огибающей
сигнала,
сглаживается при детектировании.
воздействие
шумов
на
которую
132
Точка отсчета (ТО)
u(t)/ Um0
uo(t)
1,0 1
а
0,90.9
0,80.8
0,70.7
0,60.6
0,50.5
0,40.4
0,30.3
0,20.2
u ( t) 0,10.1
0 0
u1 ( t)
0.1
-0,1
0.2
-0,2
0.3
-0,3
0.4
-0,4
0.5
-0,5
0.6
-0,6
0.7
-0,7
uн(t)
0.8
-0,8
0.9
-0,9
-1,0 1 0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100
0 5 10 15 20 25 30 35 40 45 50t 55 60 65 70 75 80 85 90 95 100
u(t)/ Um0
t , мкс
tф
Ku1(t)
uo(t)
1,21.2
б
1,0 1
0,80.8
0,60.6
0,40.4
f1 ( t0,2
)
0.2
u ( t) 0
0
-0,2
0.2
-0,4
0.4
-0,6
0.6
-0,8
0.8
-1,0 1
0
5
10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100
0 5 10 15 20 25 30 35 40 45 50t 55 60 65 70 75 80 85 90 95 100
t , мкс
uр(t)
2,0 2
1,81.8
1,61.6
1,41.4
1,21.2
1,0 1
0,80.8
0,6
0.6
f3 ( t0,4
)
0.4
0,20.2
0 0
-0,2
0.2
-0,4
0.4
-0,6
0.6
-0,8
0.8
-1,0 1
0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100
0 5 10 15 20 25 30 35 40 45 50t 55 60 65 70 75 80 85 90 95 100
в
t , мкс
uс (t)
г
0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100
t , мкс
Рис. 2.20. Радиоимпульс разностно-дальномерной системы «Loran-C»:
а – форма радиоимпульса и положение точки отсчета (ТО); б – огибающая сигнала
и ее первая производная по времени; в – разностный сигнал, определяющий
положение точки отсчета; г – измерительный строб
133
uo(t) Дифферен-
u1(t) Усилитель K
циатор
Вычитающее
устройство
uр(t) Формирова- uс(t)
тель строба
Рис. 2.21. Устройство определения точки отсчета
Структурная схема устройства определения точки отсчета [3] показана на
рис. 2.21.
Напряжение огибающей uo(t) сигнала дифференцируется (см. рис. 2.20, б)
после детектирования и усиливается в К раз, после чего вычитается из самой
огибающей, то есть
u р(t) u0(t) K
du0(t)
u0(t) Ku1(t) .
dt
(2.59)
Максимум первой производной от огибающей совпадает с точкой
наибольшей крутизны фронта принятого сигнала.
rab
+ TЗ
c
а
u ( t)
u ( t)
u1 ( t)
u1 ( t)
u ( t)
u ( t)
t
б
ra
c
t
rb
c
t
ТО1
t
u ( t)
u1 ( t)
u ( t)
t
в
ΔΘ
2πfн
tизм
ТО2
u ( t)
t
u1 ( t)
u ( t)
Рис. 2.22. Измерение задержки и разности фаз сигналов наземных станций импульснофазовой разностно-дальномерной системы «Loran-C»: а – излучение когерентных
сигналов ведущей и ведомой станциями; б, в – прием и запоминание фазы
соответственно ведущей и ведомой станции на борту ВС
t
134
Разностный сигнал uр(t) будет изменять полярность (проходить через
ноль) в точке, которую принимают за точку отсчета (рис. 2.20, в). Изменяя
значение коэффициента усиления K, можно регулировать положение точки
отсчета (ТО) на временной оси.
2.3. Многопозиционный метод определения координат
Многопозиционный метод определения координат представляет собой
разновидность разностно-дальномерного метода, в котором измеряемым
параметром сигнала является временной интервал. Этот метод реализован в
многопозиционной
системе
наблюдения
(МПСН),
предназначенной
для
обнаружения и измерения координат воздушных судов и транспортных средств
на территории аэродрома и в приаэродромном воздушном пространстве.
При использовании этого метода воздушное судно (или любой объект,
расположенный на поверхности и оборудованный приемопередатчиком)
излучает
радиосигнал,
который
принимается
несколькими
наземными
приемниками (ПРМ), расположенными в точках с известными координатами
(рис. 2.23, а). Время распространения сигнала до каждого из приемников
пропорционально их удалению от объекта (рис. 2.23, б).
Метод
основан
на
измерении
интервала
времени
Δtij
между
радиосигналами, принятыми двумя разнесенными приемниками. Величина
временного интервала определяется выражением
Δtij
1
c
Δr
1
(r0i r0 j ) ij
c
c
( x0 xi ) 2 ( y0 yi ) 2 ( z0 zi ) 2 ( x0 x j ) 2 ( y0 y j ) 2 ( z0 z j ) 2 ,
(2.60)
где xi , yi , zi , xj , yj , zj – пространственные координаты i-го и j-го приемников;
x0 , y0 , z0 – пространственные координаты воздушного судна (объекта);
r0i – расстояние между воздушным судном и i-м приемником;
Δrij – разность расстояний между ВС и i-м и j-м приемниками;
c – скорость света.
135
ВС (xO ,yO ,zO)
а
Z
h
r04
запрос
ВРЛ
r01
r03
ПРМ4 (-x4 ,0,0)
ОПРД
r05
Y
r02
ПРМ3 (0,y3 ,0)
ПРМ1 (0,0,0)
ПРМ5 (0,-y5 ,0)
ВС′ (x′O , y′O ,0)
ПРМ2 (x2 ,0,0)
б
ВС
t
ПРМ1
t
r01
Δt12
c
ПРМ2
t
r02
c
ПРМ3
Δt13
t
r03
c
ПРМ4
t
r04
ПРМ5
c
- Δt14
Δt15
r05
c
Рис. 2.23. Многопозиционная система наблюдения:
а – взаимное расположение ВС и радиоприемных устройств;
б – временные диаграммы работы
t
X
136
Для измерения одного интервала времени Δtij (i≠j) необходимо иметь два
приемника (ПРМ). Для определения неизвестных координат x0 , y0 , z0 объекта
необходимо решить систему, состоящую из трех уравнений (2.60) для трех пар
приемников. Один из приемников в каждой паре может быть общим, поэтому
для определения пространственных координат объекта требуется не менее
четырех ПРМ.
В качестве примера рассмотрим многопозиционную систему наблюдения,
состоящую из пяти ПРМ, размещенных на поверхности (рис. 2.24). Общим
приемником для каждой пары является ПРМ1 .
Y
-Δt14
y3
Δt15
ПРМ3
Δt12
y0
Δt13
ПРМ1
ПРМ4
-x4
ПРМ2
0
-x0
x2
d
d
-y5
ПРМ5
d
d
Рис. 2.24. Пример расположения приемников МПСН и гиперболические
линии положения Δt1i (для высоты h)
X
137
Уравнение (2.60) по каждой паре приемников описывает поверхность
положения равных значений Δt1j (j=2,…,5) в виде гиперболоида вращения. Вид
поверхностей положения для четырех пар ПРМ показан на рис. 2.25.
Общая точка пересечения всех поверхностей положения является
искомым местом объекта и определяется координатами x0, y0, z0. Для
нахождения места ВС достаточно пересечения трех гиперболоидов, которые
выбирают исходя из получения минимума геометрического фактора. Четвертый
гиперболоид может использоваться для проверки правильности других
измерений или разрешения неоднозначности.
Если известна высота полета ВС (z0 = h) или объект находится на
поверхности аэродрома (z0 = 0), то гиперболоиды вращения заменяются
гиперболами, представляющими собой линии сечения поверхностей положения
горизонтальной плоскостью на заданной высоте z0 (рис. 2.25). Набор таких
гиперболических линий положения Δt1j для высоты h показан на рис. 2.24 и
2.25.
Для определения плановых координат x0 , y0 при известной высоте z0
достаточно наличия двух пар приемных станций. Наличие двух дополнительных
пар приемников повышает точность определения места объекта за счет
избыточности информации.
Рассмотрим случай (рис. 2.26), когда объект, координаты (x0 , y0) которого
требуется определить, и приемники сигнала (ПРМi , ПРМj , ПРМk) с известными
координатами находятся на поверхности аэродрома (то есть z0 = 0). При этом
общим для каждой пары приемников будет ПРМi .
Тогда уравнение (2.60) для пары приемников ПРМi и ПРМj примет вид
Δtij
Δrij 1
c
c
[ ( x0 xi )2 ( y0 yi )2 ( x0 x j )2 ( y0 y j )2 ].
M
2d
X
M
h
Y
Рис. 2.25. Поверхности положения равных
значений Δt1j для четырех пар ПРМ
ПРМ4
ПРМ1
Z
ПРМ3
M
2d
ПРМ1
Z
ПРМ1
Z
ПРМ5
Y
Y
X
X
h
M
ПРМ1
Z
Y
ПРМ2
X
138
139
Перейдем от измеренной разности времени Δtij приема сигнала разными
приемниками к разности расстояний Δrij между ВС и этими приемниками
Δrij ctij ( x0 xi ) 2 ( y0 yi ) 2 ( x0 x j ) 2 ( y0 y j ) 2 ,
(2.61)
где xi , yi , xj , yj – известные координаты i-го и j-го приемников;
Δrij – разность расстояний между ВС и i-м и j-м приемниками;
c – скорость света.
Y
Δrik
ПРМj
(xj , yj)
Δrij
ПРМn
(xn , yn)
y'0
x" 0
x'0
X
ПРМi
(xi , yi)
ПРМk
(xk , yk)
Δrin
y" 0
Рис. 2.26. Местоположение объекта как точка пересечения
гипербол равных разностей расстояний
140
После возведения в квадрат уравнения (2.61) и группировки подобных
членов получим
2
Qij ( xi x j ) x0 ( yi y j ) y0 Δrij ( x0 xi ) ( y0 yi )
2
;
(2.62)
Qij 0,5[( xi2 x 2j ) ( yi2 y 2j ) Δrij2 ] .
Аналогично для другой пары приемников ПРМi и ПРМk получим
подобное выражение:
2
2
Qik ( xi xk ) x0 ( yi yk ) y0 Δrik ( x0 xi ) ( y0 yi ) ;
(2.63)
Qik 0,5[( xi2 xk2 ) ( yi2 yk2 ) Δrik2 ] .
После вычитания выражения (2.63) из (2.62) образуется уравнение
Qij Qik xi x j xi xk
y y j yi yk
x0 i
Δrij Δrik Δrij
Δrij Δrik y0 0 ,
Δr
ik
(2.64)
представляющее собой линейное уравнение вида
y0 = ax0+b
с коэффициентами
(2.65)
a
Δrij ( xi xk ) Δrik ( xi x j )
;
Δrik ( yi y j ) Δrij ( yi yk )
(2.66)
b
Δrik Qij Δrij Qik
.
Δrik ( yi y j ) Δrij ( yi yk )
(2.67)
Заменяем в уравнении (2.62) y0 на x0 в соответствии с (2.65) и возводим
полученное в результате такой замены выражение в квадрат.
После
преобразований получается квадратное уравнение вида
Ax02 Bx0 C 0 .
(2.68)
Коэффициенты этого квадратного уравнения равны:
2
2
2
A [( xi x j ) a( yi y j )] rij (1 a )
;
2
2
B 2{b( xi x j )( yi y j ) ab( yi y j ) Qij [( xi x j ) a( yi y j )] rij ( xi ab ayi )}
2
2
2
2
C [Qij b( yi y j )] rij [ xi (b yi ) ] .
(2.69)
141
Можно провести замену y0 на x0 в соответствии с (2.65) и в уравнении
(2.63). Тогда коэффициенты квадратного уравнения будут описываться
выражениями (2.69), в которых необходимо заменить индекс j на k .
Решения квадратного уравнения (2.68) совместно с линейным уравнением
(2.65) определяют два возможных места нахождения объекта, представляющих
собой две точки пересечения гипербол (рис. 2.26):
2
B B 4 AC
'
;
x0
2A
'
'
y 0 = a x 0+b ;
2
B B 4 AC
'
'
;
x0
2A
"
(2.70)
"
y 0 = a x 0+b .
Для разрешения такой неоднозначности в определении места нахождения
объекта можно использовать дополнительный приемник ПРМ n , образующий с
ПРМi еще одну пару станций (рис. 2.26). Линия положения равной разности
расстояний Δrin пересечется с ранее полученными гиперболами только в одной
общей точке.
Точность измерения места нахождения объекта зависит от его положения
относительно приемников сигнала и характеризуется рабочей зоной. Форма
рабочей зоны разностно-дальномерной системы определяется формой цепочек
приемных станций.
При конфигурации расположения пяти приемников, изображенной на рис.
2.24, общая форма рабочей зоны МПСН состоит из участков рабочих зон
цепочек станций с углами пересечения баз 0° (синяя линия) и 90° (красная
линия). Форма общей рабочей зоны такой МПСН (серая линия) для различных
значений геометрического фактора ГΔr показана на рис. 2.27, а.
При этом в направлении осей расположения станций большую точность
обеспечивают линейные цепочки станций (с углом пересечения баз 0°), а в
диагональных направлениях – цепочки с углом пересечения баз 90°. Выбор
используемых цепочек осуществляет центральная станция.
142
а
ГΔr=10
3
ГΔr= 4
1
4
2
5
ГΔr=10
б
ГΔr= 4
ГΔr= 2
ГΔr= 1,5
3
t
2
°
1
120
4
Рис. 2.27. Рабочие зоны многопозиционной системы наблюдения:
а – для пяти; б – для четырех приемных станций
143
Общая форма рабочей зоны для МПСН, состоящей из четырех
приемников, цепочки которых повернуты на 120°относительно друг друга,
показана на рис. 2.27, б.
Сложность определения интервала Δtij в МПСН заключается в том, что он
должен
измеряться
между
моментами
времени
прихода
сигналов
на
разнесенные в пространстве приемники. Поэтому величина интервала Δtij
измеряется на центральной станции, куда поступает информация со всех
приемников системы. Передача информации на центральную станцию
сопровождается некоторой задержкой, обусловленной ее преобразованием и
прохождением по линии связи. Величина этой групповой задержки должна
учитываться при измерении Δtij на центральной станции. Таким образом, в
МПСН должна осуществляться жесткая временная синхронизация всех
процессов.
Различают два вида синхронизации в многопозиционной системе
наблюдения:
системы единого времени;
системы раздельного времени.
В системе единого времени сигналы, принятые удаленными приемниками,
транслируются по линиям связи, имеющим определенную длину и, значит,
соответствующие задержки прохождения. Преобразование информации и
измерение интервала Δtij происходит на центральной станции в реальном
масштабе времени с учетом групповых задержек в линии связи.
Достоинство такого метода заключается в простоте приемного устройства,
которое не осуществляет преобразования информации.
Недостаток
систем
единого
времени
связан
с
недостаточной
стабильностью характеристик линий связи, а значит, с необходимостью строгой
калибровки линий с целью определения групповой задержки. Кроме того,
измерение интервала Δtij в реальном масштабе времени ограничивает
144
пропускную способность системы при большом количестве принятых сигналов
от многих объектов, а также из-за трудностей измерения малых значений Δtij .
В системах раздельного времени каждый приемник измеряет текущее
время приема сигнала от воздушного судна. На центральную станцию
передается код принадлежности сигнала данному ВС и время его приема по
внутренней шкале времени приемника.
Измерение интервала Δtij происходит на центральной станции по
информации о времени поступления сигнала на каждый из приемников. При
этом необходимо, чтобы внутренние шкалы времени всех приемников были
строго синхронны, иначе результаты измерений разными приемниками
окажутся несопоставимыми.
Такая синхронизация должна осуществляться от внешнего высокоточного
датчика времени. В качестве датчика точного времени может быть использован
опорный наземный передатчик (ОПРД), излучающий сигналы точного времени
(рис. 2.23, а). Эти сигналы принимаются всеми приемниками системы, и по ним
синхронизируются их внутренние шкалы времени (с учетом задержки на
распространение сигнала от ОПРД до ПРМ, расстояние между которыми
известно). Для обеспечения работы такой системы необходимо, чтобы опорный
передатчик и приемники находились в зоне прямой радиовидимости, иначе
точность синхронизации будет недостаточной.
Другим датчиком точного времени, по которому синхронизируются
внутренние
шкалы
приемников,
является
глобальная
навигационная
спутниковая система (ГНСС). Для этого совместно с приемником системы
МПСН устанавливается приемник ГНСС, шкала времени которого и является
внутренней шкалой приемника МПСН. Так как шкалы времени всех
приемников ГНСС с высокой точностью привязаны к единой шкале времени
спутниковой системы, то точность синхронизации в данном случае достигает
единиц наносекунд.
В системах раздельного времени преобразование сигнала и измерение
времени выполняется в ПРМ, и на центральную станцию передается
145
информация в цифровом виде, а не аналоговый сигнал. Это позволяет снизить
требования к линии передачи данных, так как изменение характеристик линии
не имеет критического влияния на измерение временного интервала Δtij . Однако
при этом усложняются приемники МПСН.
В многопозиционных системах наблюдения авиационного назначения в
качестве сигнала, излучаемого
самолетом и принимаемого
наземными
приемниками (рис. 2.23), используется ответ ВС (на частоте 1090 МГц) на
запрос в режиме «S» (на частоте 1030 МГц) вторичным радиолокатором (ВРЛ).
В этом сигнале содержится информация об идентификационном номере ВС и о
высоте полета. Следует отметить, что при этом передается барометрическая
высота ВС, а МПСН измеряет геометрическую высоту z0 , которые могут сильно
различаться. Возможно использование также сигналов ADS-B или сигналов
бортовых систем предотвращения столкновений (БСПС).
При такой организации работы МПСН является пассивной системой,
только принимающей сигналы от ВС. При этом объекты, находящиеся на малых
высотах или на поверхности аэродрома, могут быть не обнаружены из-за того,
что находятся ниже зоны действия вторичного радиолокатора или в радиотени
строений и поэтому не принимают запросный сигнал ВРЛ и не излучают
ответный.
Возможна организация работы МПСН в активном режиме, при котором
система сама генерирует запросный сигнал (на частоте 1030 МГц) своим
запросчиком. Зона действия этого запросчика должна покрывать области, не
обслуживаемые ВРЛ. При этом может быть измерена дальность до объекта, что
повышает точность определения его координат. Однако запросные сигналы
МПСН в активном режиме создают помехи для работы вторичного
радиолокатора.
146
2.4. Дифференциальный метод повышения
точности измерений
В радионавигационных системах дальнего и глобального действия волна
до приемника проходит путь в тысячи километров. На этом пути значительно
изменяются условия распространения, что приводит к искривлению траектории
распространения, искажению параметров сигнала и, следовательно, снижению
точности определения местоположения приемника.
Распространение сигнала и поверхностной, и пространственной волнами,
присущее мириаметровым и километровым волнам, приводит к запаздыванию
пространственной волны из-за того, что она проходит большее расстояние.
Зависимость такого запаздывания τЗ от расстояния до передающей станции для
частоты fн = 100 кГц показана на рис. 2.28.
Интерференция сигналов поверхностной и пространственной волн
приводит к искажению суммарного сигнала и снижению точности измерений,
особенно при использовании непрерывных сигналов.
Кроме того, на стабильность и дальность распространения сильно влияет
состояние ионосферы и подстилающей поверхности на трассе распространения.
τЗ , мкс
160
120
80
Ночь
День
40
0
0
400
800
1200
1600
R , км
Рис. 2.28. Запаздывание пространственной волны относительно поверхностной
в зависимости от пройденного расстояния
147
Влияние условий распространения волн особенно существенно для
радионавигационных систем дальнего действия, использующих очень низкие и
низкие частоты (Omega, Loran-C) и спутниковых систем (ГЛОНАСС и GPS),
работающих в ультравысокочастотном диапазоне, сигналы которых проходят
большое расстояние через ионосферу.
Для уменьшения погрешностей определения места, вызванных условиями
распространения волны, необходимо вводить в результаты измерений поправки,
учитывающие и компенсирующие эти особенности.
Одним
из
методов
повышения
точности
определений
является
применение дифференциального режима измерений [13].
Впервые дифференциальный режим был применен для повышения
точности измерений в системах Omega и Loran-C. В настоящее время он широко
используется
в
спутниковых
системах
навигации
как
основа
систем
функционального дополнения глобальных навигационных спутниковых систем
(ГНСС).
Структура дифференциальной подсистемы ГНСС показана на рис. 2.29.
Созвездие навигационных ИСЗ
ВС1
ВС2
Станция
передачи
дифференциальной поправки
ККС
ΔW
Вычислитель
дифференциальной поправки
WКС
Wизм
Приемник
спутниковой
навигации
Истинные координаты ККС
Рис. 2.29. Структура дифференциальной подсистемы ГНСС
148
Дифференциальный режим измерений заключается в определении с
помощью ГНСС местоположения пункта установки радионавигационной
системы, координаты которого известны с геодезической точностью.
С помощью сравнения известных координат пункта (контрольнокорректирующей станции) с измеренными значениями вычисляется значение
дифференциальной
поправки.
Дифференциальная
поправка
содержит
вычисленную систематическую составляющую погрешности определения
координат контрольно-корректирующей станции (ККС), которая возникла из-за
любых закономерных или аномальных изменения условий распространения
сигналов до пункта измерения.
Передача значения дифференциальной поправки по каналам передачи
данных
заинтересованным пользователям позволяет
уточнить им свои
пространственные координаты.
Строго говоря, значение поправки верно только для точки размещения
контрольного пункта и в момент ее измерения.
Эффект от использования дифференциальной поправки зависит от того,
насколько одинаковыми будут погрешности измерения на ККС и в точке
нахождения пользователя поправки, то есть от степени пространственной и
временной корреляции погрешностей (условий измерения).
При сильной корреляции систематическая составляющая погрешности
измерения координат будет исключаться практически полностью, а при слабой
появится
остаточная
дифференциального
нескомпенсированная
метода
позволяет
погрешность.
повысить
точность
Использование
определения
координат потребителя в 10–100 раз.
Вследствие достаточно медленного характера изменения параметров
среды распространения (ионосферы) во времени и пространстве поправки
сохраняют свою достоверность в радиусе до 100–200 км.
Различают два варианта определения дифференциальных поправок:
с коррекцией координат;
с коррекцией навигационного параметра.
149
В первом варианте предполагается, что дифференциальные поправки
содержат
информацию,
которая
позволяет
уточнить
непосредственно
координаты, измеренные пользователем.
Сущность этого метода можно описать следующим алгоритмом:
ΔW = WКС – WКСизм ;
(2.71)
Ŵ0 = W0 + ΔW ,
где ΔW = ||ΔX; ΔY; ΔZ; Δδtш || – вектор пространственно-временных
дифференциальных поправок;
WКС = ||XКС , YКС , ZКС , δtшКС || – вектор истинных координат ККС;
WКСизм= ||XКСизм ; YКСизм ; ZКСизм ; δtш КСизм || – вектор измеренных координат
контрольно-корректирующей станции;
W0 = ||X0 ; Y0 ; Z0; δtш0 || – вектор измеренных координат потребителя;
Ŵ0 = ||X0+ΔX; Y0+ΔY; Z0+ΔZ; δtш0+Δδtш|| – вектор уточненных координат
потребителя.
Метод такой коррекции прост, однако его недостатком является
ограниченная
дальность,
в
пределах
которой
вычисленные
поправки
достоверны.
Действительно, дифференциальные поправки ΔW контрольная станция
определяет, сравнивая свои истинные координаты WКС с координатами,
измеренными по определенному оптимальному для нее созвездию ИСЗ. Если
потребитель (ВС1 на рис. 2.29) определяет свои координаты W0 по тому же
созвездию, то систематические составляющие погрешностей измерения у него и
на ККС сильно коррелированы и будут скомпенсированы при коррекции. Для
удаленного от ККС потребителя (ВС2 на рис. 2.29) оптимальный состав
созвездия может оказаться другим, что делает систематические составляющие
погрешностей измерения слабокоррелированными. Поэтому использовать
поправки, определенные по одному созвездию, для коррекции координат,
измеренных по другому созвездию ИСЗ, не всегда допустимо, так как может
даже ухудшить точность скорректированных координат Ŵ0 .
150
Во
втором
варианте
определения
дифференциальных
поправок
потребителю сообщаются вычисленные значения поправок к измеряемым
навигационным параметрам (например, квазидальностям) по всему набору ИСЗ,
которые находятся в зоне видимости ККС. Потребитель сам выбирает из этого
набора поправок те, которые относятся к созвездию, оптимальному для его
измерений. Таким образом, достоверность поправок сохраняется на большем
расстоянии от контрольно-корректирующей станции, так как учитывается
состав используемого созвездия.
Алгоритм этого метода описывается также выражением (2.71).
Но при этом вектор WКС =||rКС1 , rКС2 , . . . rКСN || , i=1, 2, . . . N является
вектором истинных значений квазидальностей rКСi по каждому i-му из всех
N, находящихся в зоне видимости ККС искусственных спутников. Величины
истинных значений rКСi вычисляются на контрольной станции исходя из ее
истинных координат XКС , YКС , ZКС .
Вектор WКСизм = ||rКС1изм ; rКС2изм ; ... rКСNизм || является вектором
измеренных на ККС значений квазидальностей rКСiизм по каждому i-му из всех
N искусственных спутников, наблюдаемых с контрольной станции.
Таким образом, вектор поправок ΔW = || ΔrКС1 ; ΔrКС2 ; ... ΔrКСN || содержит
набор поправок к квазидальностям по всем N видимым с контрольной станции
ИСЗ.
Потребитель выбирает из всего этого набора поправок те, которые
относятся к используемому им для определения своих координат созвездию из
четырех ИСЗ. Эти поправки применяются для определения вектора уточненных
квазидальностей по рабочему созвездию, то есть вычисляется вектор
уточненных значений квазидальностей W0 r1 , r2 , r3 , r4 .
Измерение поправок на контрольной станции осуществляется с некоторой
периодичностью. Для того чтобы учесть дискретность измерений, контрольная
станция измеряет также скорость изменения поправки квазидальности до i-го
ИСЗ на момент времени t0 и передает ее в составе вектора поправок ΔW.
151
Измеренное потребителем значение квазидальности ri(t) до i-го ИСЗ на
текущий t-й момент времени корректируется в соответствии с выражением
d ( Δrксi )
(t t0 ) ,
ri (t ) ri (t ) Δrксi (t0 )
dt
(2.72)
где ri (t ) – уточненное значение квазидальности до i-го ИСЗ на текущий t-й
момент времени;
ri(t) – измеренное потребителем значение квазидальности до i-го ИСЗ в t-й
момент времени;
Δrксi (t0) – поправка к квазидальности до i-го ИСЗ, измеренная на контрольной
станции в момент времени t0 ;
d ( Δrксi )
dt
– скорость изменения поправки квазидальности до i-го ИСЗ,
измеренная в момент времени t0.
Далее потребитель решает навигационную задачу определения своих
уточненных координат X 0 ,Y0 , Z0 , tш0 , используя для этого вектор уточненных
значений квазидальностей W0 r1 , r2 , r3 , r4 , который является правой частью
системы уравнений (1.18).
Дифференциальная коррекция координат может осуществляться также
двухчастотным методом.
Основной причиной, снижающей точность измерения квазидальности в
спутниковых
системах,
является
изменение
скорости
распространения
электромагнитного колебания при прохождении ионосферы, что вызывает
дополнительную задержку сигнала. Величина этой задержки определяется
значением коэффициента преломления n радиоволн в ионосфере.
С учетом того, что для метровых и более коротких волн выполняется
условие 80,6Ne
⁄ f 2 << 1, выражение для коэффициента преломления будет
иметь вид
n 1 40,3
Ne
f
2
,
где Ne – число свободных электронов в 1 м3 ;
f – частота сигнала, Гц .
(2.73)
152
Отсюда видно, что коэффициент преломления в ионосфере зависит от
концентрации электронов и частоты сигнала.
Концентрация электронов в ионосфере изменяется по высоте Ne(h),
достигая максимального значения на высоте Hэ max примерно 300 км днем и
400 км ночью.
Приращение времени запаздывания сигнала δtион при прохождении
ионосферы определяется выражением
Hв
tион
40,3
cf
2
N e (h)dh
Hн
1
c
Hв
n 1dh ,
(2.74)
Hн
где Hв , Hн – высоты верхней и нижней границ ионосферы;
c – скорость света;
n – коэффициент преломления в ионосфере.
На
величину
приращения
времени
запаздывания
сигнала
δtион
существенно влияет концентрация свободных электронов в ионосфере, которая
зависит от времени года, суток, активности Солнца и многих других факторов.
Поэтому величина δtион может составлять ночью примерно 10 нс (что
соответствует расстоянию 3 м) и возрастать до 50 нс (до 15 м) днем.
Из (2.74) следует, что чем больший путь проходит сигнал в ионосфере,
тем больше величина приращения запаздывания δtион . Положению ИСЗ в зените
соответствует наименьшая длина пути сигнала в ионосфере. По мере
приближения ИСЗ к горизонту длина пути возрастает и увеличивается величина
приращения запаздывания. Это увеличение может быть учтено введением
коэффициента kα увеличения длины пути [13]
2
RЗем Cosα
k 1
RЗем H эmax
1
,
(2.75)
где α – угол возвышения ИСЗ над радиогоризонтом;
RЗем – радиус Земли;
Hэmax – высота, на которой достигается максимум концентрации свободных
электронов в ионосфере.
Зависимость коэффициента kα от угла возвышения показана на рис. 2.30.
153
На рисунке видно, что для
kα
углов возвышения спутника α<10°
дополнительная
задержка
3,53.5
3.25
сигнала возрастает примерно в
3,0 3
три раза. Поэтому использовать
2.75
сигналы ИСЗ, находящиеся над
горизонтом ниже этой величины
(которая
называется
углом
маски), не рекомендуется.
Зависимость
времени
δtион
от
день
kí ( )
2.25
2,0 2 ночь
1.75
1,51.5
1.25
приращения
запаздывания
сигнала
частоты
позволяет
осуществлять
2,52.5
kä( )
коррекцию
1,0 1
0
10
20
30
40
50
60
70
80
90
0° 10° 20° 30° 40° 50° 60° 70° 80° 90°
α
Рис. 2.30. Зависимость коэффициента
увеличения длины пути в ионосфере
от угла возвышения спутника
измеренной квазидальности.
Действительно,
квазидальности только
из
всех
составляющих
погрешности
измерения
приращение запаздывания δtион зависит от частоты
сигнала. Поэтому результаты измерения квазидальностей на двух частотах
будут отличаться на величину ΔŘ за счет влияния ионосферной задержки, то
есть
ΔŘ= Ř(f1)- Ř(f2)=c[δtион(f1)- δtион(f2)] ,
(2.76)
где Ř(f) – значение квазидальности, измеренное на частоте f ;
δtион(f) – величина приращения запаздывания, измеренная на частоте f .
Представим выражение (2.74) как функцию частоты в виде
δtион(f)= А ⁄ f .
2
С учетом этого выражение (2.76) будет иметь вид
2
A
f1
A
ctион ( f1 ) 1 2 .
f2 f2
f 2
1
2
ΔŘ= c
Отсюда получим значение приращения запаздывания, измеренное на
частоте f1,
154
2
f
ΔR
tион ( f1 )
1 12
c
f 2
1
.
(2.77)
Определенное в соответствии с (2.77) значение приращения запаздывания,
основанное на результатах измерения ΔŘ, позволяет компенсировать влияние
ионосферы на квазидальность Ř(f1) .
Двухчастотный
метод
компенсации
ионосферной
погрешности
применяется в ГНСС в режиме повышенной точности, при котором
погрешности измерения координат снижаются до значений долей метра в любой
точке пространства.
Примерно такие же погрешности достигаются при использовании ККС, но
поправки при этом достоверны на ограниченном расстоянии от контрольнокорректирующей станции, и по мере удаления от нее погрешность коррекции
возрастает.
2.5. Измерение скорости
2.5.1. Эффект Доплера
Измерение скорости основано на использовании эффекта Доплера, в
соответствии с которым частота принятого сигнала fпр отличается от частоты
излученного сигнала fизл , если источник и приемник сигнала движутся
относительно друг друга с отличной от нуля радиальной скоростью Vr = dR ∕ dt ≠
0. Радиальная скорость Vr является составляющей общей скорости движения V и
направлена вдоль линии, соединяющей
V
Vτ
источник и приемник сигналов (рис. 2.31).
Сущность эффекта Доплера можно
Vr
пояснить на следующем примере (см. рис.
R0
2.32). Пусть излучается гармоническое
колебание (рис. 2.32, а) с частотой fизл ,
имеющее период колебаний Tизл . Выделим на
Рис. 2.31. Составляющие
скорости движения
нем точки отсчета 0, 1, 2 ,… n , следующие с
интервалом Δτ .
155
Tизл
а
4 5
3
i
2
1
j
0
n
t
tn =
R0+nVr Δτ
R +V Δτ
= n-1c r
c
tn-1 =
R0+(n-1)Vr Δτ
c
n-1
k
R +kVr
tk= Δτ0
ti =
t4 =
R3+Vr Δτ
c
R0+iVr Δτ
c
R +V Δτ
t5 = 4 c r
t3 =
t2 =
Δτ
c t = R0+jVr Δτ
j
c
R2+Vr Δτ
c
R1+Vr Δτ
c
R +V Δτ
R1
t1 = 0 c r
= c
R
t0 = c0
t
б
Tпр= Tизл +
nVr Δτ
c
Рис. 2.32. Возникновение эффекта Доплера:
а – излучаемое; б – принимаемое колебание
В
точку
приема
колебание
придет
с
временной
задержкой,
пропорциональной пройденному им расстоянию.
Задержка начального отсчета равна t0
R
.
c
Пусть приемник движется относительно источника сигнала прямолинейно
и равномерно с некоторой радиальной скоростью Vr (рис. 2.31).
156
Задержка первого отсчета из-за взаимного движения источника и
приемника с радиальной скоростью Vr > 0 составит
R Vr Δ
t1 R 1 0
.
c
c
Величина задержки для i-го отсчета при Vr > 0
ti
Ri Ri 1 Vr Δ 1 ( R iV Δ ) .
c
c
c
0
r
Для конечного n-го отсчета, соответствующего окончанию периода
колебаний, величина задержки
n
1
R n Rn 1 Vr Δ 1
tn
( R0 nVr Δ )
R0
Vr Δ .
c
c
c
c
i 1
Период принятого колебания Tпр , как видно на рис. 2.32,
nV Δτ
1
Tпр Tизл t n t0 Tизл r
Tизл
c
c
n
Vr Δ ,
i 1
где Vr – радиальная скорость;
Δτ – временной интервал отсчета;
n – количество отсчетов за период колебания.
Учитывая, что n Δτ = Tизл , c = fизл λизл , период принятого колебания можно
представить в виде
Tпр Tизл
VrTизл
Vr
Tизл 1
.
f изл изл
f изл изл
Отношение Vr ∕ λизл имеет размерность частоты (c 1) и зависит от
-
радиальной скорости. Обозначим это отношение Vr
∕ λизл = FД , называемое
частотой Доплера (доплеровской поправкой частоты). Тогда окончательный вид
выражения для периода принятого колебания
FД
.
T пр Tизл 1
f изл
(2.78)
Из (2.78) видно, что при Vr ≠ 0 период принятого сигнала отличается от
периода сигнала излученного. При этом увеличение периода Tпр равносильно
уменьшению частоты fпр принятого сигнала, и наоборот.
157
Фаза излученного гармонического сигнала φизл = ωt .
Фаза принятого сигнала из-за запаздывания tзап на прохождение
некоторого расстояния R(t) будет φпр = ω(t - tзап) = ω[t – R(t)/c] .
Разность фаз между излученным и принятым сигналами тогда составит
Δφ= φизл - φпр = – ωR(t)/c .
Определим сдвиг частоты сигнала за счет доплеровского эффекта:
2fVr
2Vr
dΔ
dR
2f dR
2FД Ω Д
dt
c dt
c dt
c
;
FД f изл f пр
Vr
,
(2.79)
где ω – угловая частота сигнала, рад/с ;
f – частота сигнала, Гц ;
Vr – радиальная скорость, м/с ;
λ – длина волны, м ;
ΩД – угловая доплеровская частота, рад/с ;
FД – доплеровская частота, Гц .
Выражение
(2.79)
определяет
величину
доплеровского
сдвига
(доплеровской поправки) частоты. Знак минус в нем означает, что если
радиальная скорость Vr положительна (источник и приемник сигналов
удаляются друг от друга), то доплеровская поправка отрицательна (несущая
частота сигнала уменьшается).
2.5.2. Доплеровские измерители скорости
Доплеровский измеритель скорости и сноса (ДИСС) измеряет скорость
самолета относительно земной поверхности. Эта скорость W называется
путевой, в отличие от воздушной скорости V относительно воздуха, которая
приблизительно совпадает с продольной осью самолета. Угол α между этими
скоростями возникает из-за воздействия на самолет ветра и называется углом
сноса (см. рис. 2.34).
Доплеровский измеритель скорости и угла сноса позволяет измерять три
составляющих (две горизонтальные и вертикальную) вектора путевой скорости.
158
Если ДИСС является датчиком путевой скорости для системы счисления пути,
то для определения счисленных координат требуется знание только
горизонтальных составляющих путевой скорости. Способность измерять
вертикальную составляющую путевой скорости позволяет использовать его для
вождения вертолетов.
Структурная схема доплеровского измерителя представлена на рис. 2.33.
Для измерения скорости полета с самолета в сторону земной поверхности
через
узкую
диаграмму
направленности
излучается
непрерывное
немодулированное электромагнитное колебание (рис. 2.33), генерируемое
передатчиком. Отраженный от земной поверхности сигнал принимается на
борту ВС приемником.
Излученный и принятый сигналы отличаются по частоте из-за влияния
эффекта Доплера. При этом доплеровский сдвиг частоты возникает как при
распространении сигнала от самолета до отражающей поверхности, так и при
обратном распространении его до приемника ВС. Следовательно, величина
доплеровского сдвига частоты FД имеет удвоенное по сравнению с (2.79)
значение. Для выявления доплеровского сдвига частоты принимаемые и
излучаемые в текущий момент времени непрерывные сигналы поступают в
смеситель, на выходе которого возникает разностная частота биений FД. Эта
частота, измеренная частотомером, поступает в вычислитель, где определяется
значение путевой скорости и угла сноса.
Определим величину возникающего доплеровского сдвига частоты FД для
случая горизонтального полета (см. рис. 2.34).
fизл
Передатчик
Приемник
fизл
fпр
fпр
Смеситель
FД
Частотомер
Вычислитель
W
α
Рис. 2.33. Структурная схема доплеровского
измерителя скорости
159
Конус с углом при
вершине 2φ0
V
h
α
Θ
W
Wr
y0
γ φ
0
r
Отражающая
поверхность
0
ΔΘ
x0
Δγ
Линия пути
P
Изочастотная линия
Рис. 2.34. Ориентация диаграммы направленности антенны однолучевого
доплеровского измерителя и образование изочастотной линии
Радиальная составляющая путевой скорости Wr может быть выражена
через осевой угол φ0 , отсчитываемый в плоскости, проходящей через вектор
путевой скорости W и ось диаграммы направленности антенны (ДНА)
Wr WCoso
(2.80)
или через установочные углы антенны
Wr WCos(Θ )Cos ,
(2.81)
где W – путевая скорость;
θ – установочный угол антенны в горизонтальной плоскости;
γ – установочный угол антенны в вертикальной плоскости;
α – угол сноса.
Из сравнения (2.80) и (2.81) следует, что
o arccos[Cos(Θ )Cos ] .
(2.82)
Таким образом, доплеровская поправка частоты
FД
FД
2W
2W
Cos o ;
(2.83)
Cos(Θ )Cos ,
(2.84)
где λ – длина волны излучаемого электромагнитного колебания.
160
Из (2.83) видно, что доплеровская частота определяется значением
осевого угла φ0 . Поверхность, характеризующаяся постоянством осевого угла,
представляет собой конус (рис. 2.34.), ось которого совпадает с направлением
вектора путевой скорости, а угол при вершине равен 2φ0 .
Линия пересечения конуса и плоскости (отражающей поверхности), в
свою очередь, характеризуются тем, что все элементарные отражатели,
находящиеся на ней вызывают появление доплеровской частоты FД одной и той
же величины. Поэтому эта линия называется изочастотной.
На
рис.
2.34
видно,
что
радиус
сечения
конуса
плоскостью,
перпендикулярной его оси на некотором удалении x0 от вершины и проходящей
через точку P изочастотной линии равен, с одной стороны,
r xotg o ,
(2.85)
r 2 yo2 h 2 ,
(2.86)
с другой стороны,
где xo , yo – координаты точки P в прямоугольной системе координат, центр
которой находится в вершине конуса, а ось x направлена вдоль вектора путевой
скорости;
h – высота полета.
Подставив (2.85) в (2.86):
xo2tg 2 o yo2 h 2 ,
после преобразований получим
x
2
h ctg o
2
2
y
2
h
2
1 .
(2.87)
Уравнение (2.87) является уравнением гиперболы и описывает форму
изочастотной линии при φ0 = const .
Семейство изочастотных линий при h = const для различных значений φ0
приведено на рис. 2.35, а. На рис 2.35, б показано изменение доплеровской
частоты вдоль линии пути для этих углов φ0 .
161
Выражение
(2.84)
определяет
зависимость
измеряемой
доплеровской
а
y
-60º
-70º
φ0 = -80º
φ0 = 80º
70º
60º
50º
40º
частоты от параметров полета
30º
ВС (путевой скорости W и
угла
сноса
α),
20º
которые
x
являются неизвестными.
Для
решения
однозначного
уравнения
необходимо
(2.84)
избавиться
от
FД (φ0 )
б
одной из неизвестных.
FД (20º)
FД (50º)
FД (70º)
FД (80º)
Это можно сделать, если
антенна
измерителя
возможность
имеет
вращаться
в
x
FД (-60º)
горизонтальной плоскости (то
есть угол θ может изменяться
при
сохранении
установочного
Зависимость
величины
угла
в
FД (θ)
γ).
U
доплеровской
α
частоты от угла θ поворота
антенны
V
в
θ
FД max
W
горизонтальной
плоскости показана на рис.
2.35, в.
В соответствии с этим
рисунком
и
выражением
Рис. 2.35. Семейство изочастотных линий:
а – форма линий; б – зависимость FД вдоль линии
пути от осевого угла φ0 ; в – зависимость FД от угла
θ поворота антенны в горизонтальной плоскости
(2.84) максимальное значение
доплеровской частоты FД max
достигается, когда Cos(θ–α)=1 .
Это соответствует случаю равенства углов θ = α, когда ось ДНА совпадает
с направлением вектора путевой скорости.
162
При этом максимальное значение доплеровской частоты
FДmax
2W
Cos .
(2.88)
Таким образом, вращая антенну в горизонтальной плоскости, добиваются
получения максимума доплеровской частоты FД max. При этом угол поворота
антенны относительно продольной оси самолета равен углу сноса, а в
соответствии с (2.88) значение путевой скорости
,
(2.89)
W
F
2Cos Дmax
где λ – длина волны;
γ – установочный угол наклона антенны в вертикальной плоскости.
Доплеровские измерители, реализующие такую процедуру измерения W и
α , называются однолучевыми.
В таких измерителях установка антенны в положение максимума
доплеровской частоты может сопровождаться угловой ошибкой δα = θ - α,
которая является ошибкой измерения угла сноса.
Тогда с учетом этого, а также (2.88) выражение (2.84) для доплеровской
частоты можно представить в виде
FД
2W
Cos(Θ )Cos FДmax Cos .
Разложив Сos δα в ряд Тейлора и ограничившись двумя первыми его
членами, получим
2
FД FДmax 1 FДmax ΔFД ;
2
ΔFД FДmax
2
2
,
где ΔFДα – ошибка измерения максимума доплеровской частоты из-за неточной
установки антенны.
Отсюда следует, что
2
ΔFД
,
FДmax
(2.90)
где ΔFДα /FДmax – относительная ошибка измерения максимума доплеровской
частоты.
163
б
а
δα , град
ΔW / W , %
γ = 80º
20 20
70º
γ = 80º
60º
2 ( F ) 16
16
3 ( F ) 14
14
9 ( F )
12 12
6 ( F )
10 10
8
6
6
4
4
2
2
50 50
45 45
45
w2
(
) 40
40
30º
) 35
20º w3 (35
30
w9 ( ) 30
25 25
w6 ( )
20 20
w7 ( )
15 15
w8 ( )
10 10
ΔFДα,, , 5 5
, 0 0
0
0
5
10
15
20
25
30
35
40
45
50
5 10 15 20 25 30 35 40 45 50
F
Гц
45º
30º
20º
υ,
10 11 12 13 14 15 16 17 18 19 20
00 1 22 3 44 5 66 7 88 9 10
12 14 16 18 20
град
{
8
8 ( F )
60º
º
18 18
7 ( F )
70º
δγ
Рис. 2.36. Зависимость ошибок измерения в однолучевом доплеровском
измерителе при разных углах наклона антенны γ: а – угла сноса от ошибки определения
максимума доплеровской частоты; б – путевой скорости от угла наклона траектории
На рис. 2.36, а показана зависимость ошибки измерения угла сноса α от
ошибки определения максимума доплеровской частоты для разных значений
установочного угла γ в однолучевом измерителе.
Выражение (2.88) показывает зависимость измеряемой доплеровской
частоты от установочного угла γ в вертикальной плоскости.
Если антенна закреплена на самолете неподвижно, то любые его
пространственные эволюции приводят к изменению этого угла относительно
отражающей
поверхности.
Это
вызывает изменение FД и приводит
к
ошибкам
измерения
скорости
WБ
υ
путевой
W
однолучевым
измерителем.
При
WВ
наборе
высоты
или
снижении самолета полный вектор
путевой скорости W (рис. 2.37)
WГ
Рис. 2.37. Составляющие вектора
путевой скорости
164
имеет вертикальную составляющую WВ , что приводит к появлению некоторого
угла υ наклона траектории, который по величине близок к углу тангажа ВС.
Тогда доплеровская частота из-за появления этого угла
2
FДmax
Cos( ) WCosυC
os WSinυ
Sinγ
WВ
WГ
2W
2WГ
Cos
2WВ
Sin FДист ΔFДв ,
(2.91)
где WГ – горизонтальная составляющая путевой скорости, необходимая для
счисления пути;
WВ – вертикальная составляющая путевой скорости самолета;
FДист – истинное значение доплеровской частоты, вызванное горизонтальной
составляющей путевой скорости;
ΔFДв – приращение доплеровской частоты, обусловленное вертикальной
составляющей путевой скорости.
Отношение ΔFДв /FДист равно относительной ошибке измерения путевой
скорости, которая с учетом (2.91) будет
ΔFДв
ΔW WВ
tg tgtg .
FДист
W
WГ
(2.92)
Зависимость относительной ошибки измерения путевой скорости от угла
наклона траектории для различных значений установочного угла γ приведена
на рис. 2.36, б.
Для устранения влияния вертикальных эволюций самолета на точность
измерений
необходимо
поддерживать
постоянным
значение
угла
γ
относительно горизонтальной плоскости. Это может быть достигнуто при
установке антенны на гиростабилизированной платформе.
Однако выдерживание горизонтального положения антенны выполняется
с некоторой ошибкой стабилизации δγ (пусть и небольшой), которая приводит к
наличию остаточной ошибки измерения путевой скорости.
Величина этой ошибки также определяется выражениями (2.91) и (2.92), в
которых вместо угла υ берется угол δγ . Следует отметить, что погрешность
165
стабилизации δγ составляет 1-2º , в то время как величина υ может достигать
значений 20–30º . Поэтому стабилизация горизонтального положения антенны
заметно повышает точность измерения путевой скорости в однолучевых
доплеровских измерителях.
Влияние крена ψ самолета в однолучевом измерителе на точность
измерения незначительно даже при отсутствии гиростабилизации антенны.
Действительно, если угол сноса α = 0, то появление угла крена вызовет
перемещение луча по поверхности конуса (рис. 2.34). При этом луч по земной
поверхности будет перемещаться вдоль изочастотной линии, что не вызовет
изменения доплеровской частоты, а значит, не приведет к появлению ошибок в
измерении путевой скорости W.
На рис. 2.36 видно, что ошибки измерения угла сноса и путевой скорости
сильно возрастают с увеличением установочного угла γ, а величина
доплеровской частоты (рис. 2.35), наоборот, быстро уменьшается, что
затрудняет ее измерение.
Поэтому, с одной стороны, целесообразно уменьшать установочный угол
γ с целью снижения ошибок измерения. Однако, с другой стороны, уменьшение
этого угла приводит к более пологому облучению земной поверхности
(увеличению угла падения волны). Это обусловливает быстрое уменьшение
коэффициента обратного отражения (особенно от водных поверхностей) и,
значит, быстрое снижение мощности отраженного сигнала (то есть уменьшение
дальности действия доплеровского измерителя).
Исходя из этих противоречивых требований, на практике выбирают
величину установочного угла γ в вертикальной плоскости в диапазоне 50 –70º.
Распространения однолучевые доплеровские измерители не получили в
силу своих недостатков:
необходимости постоянного отслеживания
максимума измеряемого
значения доплеровской частоты (путем поворота антенны);
требования постоянства угла γ наклона антенны в вертикальной плоскости
при эволюциях самолета (путем гиростабилизации антенны).
166
Эти
недостатки
делают
однолучевые
доплеровские
измерители
недостаточно точными и технически сложными.
В значительной мере свободны от этих недостатков многолучевые
доплеровские измерители, имеющие три или четыре луча, ориентация которых в
пространстве может быть различной.
Для примера рассмотрим четырехлучевой измеритель, изображенный на
рис. 2.38. Доплеровские частоты по противоположно направленным лучам
равны по величине, но противоположны по знаку: FД1 = –FД3 , FД2 = –FД4 .
В устройстве измеряется разностная доплеровская частота по каждой паре
лучей, лежащих в одной вертикальной плоскости. При горизонтальном полете в
соответствии с (2.84) эти разностные частоты:
y
4
ξ
γ
α
5
z
V
W
φ0
3
φ0
1
x
θ
θ
z′
2
x׳
Рис. 2.38. Ориентация лучей в четырехлучевом доплеровском измерителе
167
FД 13 FД 1 FД 3
4W
FД 24 FД 2 FД 4
4W
Cos(Θ )Cos ;
Cos(Θ )Cos .
(2.93)
Решая систему (2.93) из двух уравнений относительно двух неизвестных
(W , α), однозначно определяют значение угла сноса
arctgctgΘ
и путевой скорости
W
FД 13 FД 24
FД 13 FД 24
8CosCosCosΘ
(2.94)
( FД 13 FД 24 ) ,
(2.95)
где λ – длина волны излучаемых колебаний;
θ – установочный угол антенны в горизонтальной плоскости;
γ – установочный угол антенны в вертикальной плоскости;
α – угол сноса самолета.
Рассмотрим, как влияет пространственное положение самолета на
точностные характеристики многолучевого доплеровского измерителя с
неподвижно закрепленными антеннами.
Если самолет приобрел некоторый угол тангажа υ, то в соответствии с
(2.84) доплеровские частоты по лучам 1 и 3 будут соответственно
2W
FД' 1
Cos(Θ )Cos( ) ;
FД' 3
2W
Cos(Θ )Cos( ) ,
а разностная частота по этим лучам при наличии угла тангажа (после
тригонометрических преобразований) с учетом (2.93)
'
'
'
FД 13 FД 1 FД 3
4W
Cos(Θ )CosCos FД 13Cos .
(2.96)
где FД13 – разностная доплеровская частота при отсутствии угла тангажа.
Аналогично
получим
выражение
для
измеренной
разностной
Cos(Θ )CosCos FД 24 Cos .
(2.97)
доплеровской частоты по лучам 2 и 4 в виде
FД' 24 FД' 2 FД' 4
4W
168
Подставив (2.96) и (2.97) в выражение (2.94), получим
'
'
FД 13 FД 24
( FД 13 FД 24 )Cos
'
tg ctgΘ
ctgΘ
tg .
( FД 13 FД 24 )Cos
'
'
F
F
Д 13
(2.98)
Д 24
Отсюда видно, что появление угла тангажа υ не влияет на точность
измерения угла сноса α .
Подстановка (2.96) и (2.97) в выражение (2.95) даст
'
W
( FД 13 FД 24 )
Cos WCos .
8CosCosCos
(2.99)
Разложив Сos υ в ряд Тейлора и ограничившись двумя первыми его
членами, получим
'
W WCos W 1
W ΔW ,
W W
2
2
2
2
где ΔW – приращение значения измеренной путевой скорости за счет наличия
угла тангажа.
Отсюда следует, что появление угла тангажа υ приводит к ошибке
измерения
путевой
скорости,
относительная
величина
которой
носит
квадратичный характер и равна
W
.
W
2
2
(2.100)
Величина этой ошибки в многолучевом измерителе значительно меньше,
чем подобная ошибка (2.92) для однолучевого.
Рассмотрим влияние угла крена на точность измерения в многолучевом
доплеровском измерителе. При горизонтальном полете для малых значений угла
крена ψ =10-20º можно приблизительно принять, что доплеровская частота в
соответствии с (2.83) по лучам
FД' 1 FД' 4
2W
FД' 2 FД' 3
2W
Cos(0 ) ;
Cos(0 ) ,
где φ0 – осевой угол наклона антенны.
Тогда разностная частота по паре противоположных лучей
169
FД' 13 FД' 1 FД' 3
4W
4W
Cos( ) Cos( )
0
0
(2.101)
Cos0Cos FД 13Cos .
Аналогично получим по другой паре лучей
FД' 24 FД' 2 FД' 4
4W
4W
Cos( ) Cos( )
0
0
(2.102)
Cos0Cos FД 24Cos .
Сравнивая (2.101) и (2.102) с (2.96) и (2.97), можно сделать вывод, что
результаты измерения угла сноса и путевой скорости при наличии угла крена
описываются выражениями, аналогичными (2.98) – (2.100) , в которых угол υ
должен быть заменен на угол ψ.
Таким образом, наличие крена так же влияет на результаты измерения W и
α в многолучевом измерителе, как и наличие угла тангажа, и это влияние
невелико.
Наличие вертикальной составляющей Wв полного вектора путевой
скорости W (рис. 2.37) в соответствии с (2.91) приводит к появлению
приращения доплеровской частоты ΔFДв , которое имеет одинаковое значение
по каждому из лучей измерителя. Однако использование разностной частоты по
парам противолежащих лучей (1–3 и 2–4) позволяет компенсировать это
приращение ΔFДв в разностных доплеровских частотах FД13 и FД24 :
FД13 = (FД1 – ΔFДв) – (FД3 – ΔFДв)= FД1 – FД3 ;
FД24 = (FД2 – ΔFДв) – (FД4 – ΔFДв)= FД2 – FД4 .
С одной стороны, это является достоинством такого многолучевого
измерителя, так как исключает влияние вертикальной составляющей Wв путевой
скорости на результаты измерения W и α .
С другой стороны, невозможность определения этой составляющей в
устройствах, измеряющих разностные доплеровские частоты по диагональным
лучам, является их недостатком.
Определение всех составляющих полного вектора путевой скорости с
учетом их знака требуется в вертолетных доплеровских измерителях.
Рассмотрим
трехлучевой
вертолетный
ориентация лучей которого показана на рис. 2.39.
доплеровский
измеритель,
170
y
β
Wz
ξ
Wy
γ
z
Wx
φ
W
x
180◦–β
3
1
θ
z׳
θ
x׳
2
Рис. 2.39. Ориентация лучей в вертолетном доплеровском измерителе
Установочные углы φ, ξ и β лучей ДНА здесь задаются в плоскостях,
проходящих через оси диаграмм и продольную, поперечную и вертикальную
оси вертолета соответственно. Отсчет углов ведется от положительного
направления соответствующей оси вертолета.
В измерителе определяются значения доплеровских частот по каждому из
лучей. Для этого определим проекции составляющих путевой скорости по осям
вертолета на оси ДНА.
В общем виде доплеровская частота описывается выражением
2Wx
Cos
2W y
Cos
2Wz
Cos ,
(2.103)
i = 1, 2, 3 ,
где Wx, Wy, Wz – составляющие полного вектора путевой скорости на
FДi
продольную, вертикальную и поперечную оси вертолета;
φ , ξ , β – установочные углы диаграмм направленности антенн;
λ – длина волны.
В выражении (2.103) необходимо учитывать знаки составляющих путевой
скорости. Если направление проекции составляющей скорости совпадает с
171
направлением луча ДНА, то берется знак «+». В противном случае проекция
составляющей берется со знаком «–».
Для примера рассмотрим случай движения вертолета вперед-вниз-вправо,
(рис. 2.39).
В соответствии с (2.103) значения доплеровских частот по лучам будут
FД 1
2Wx
Cos
2W y
FД 2
2Wx
Cos
2W y
FД 3
2Wx
Cos
Cos
2Wz
Cos ;
Cos
2Wz
Cos ;
2W y
Cos
2Wz
(2.104)
Cos .
Решение системы уравнений (2.104) дает значения составляющих вектора
путевой скорости по осям вертолета (в связанной прямоугольной системе
координат) в виде
Wx
FД 2 FД 3
;
4 Cos
Wy
FД 1 FД 3
;
4 Cos
Wz
FД 2 FД 1
.
4 Cos
(2.105)
При наличии у вертолета углов крена и тангажа связанная система
координат оказывается повернутой относительно местной горизонтальной
плоскости, в которой должны определяться для счисления пути составляющие
вектора путевой скорости.
Пересчет составляющих путевой скорости к горизонтальной плоскости
осуществляется преобразователем по следующим выражениям:
WxГ = Wx Сosυ – Wy Sinυ Cosψ + Wz Sinυ Sinψ ;
WyГ = Wx Sinυ + Wy Cosυ Cosψ – Wz Cosυ Sinψ ;
WzГ = Wy Sinψ + Wz Cosψ ,
(2.106)
172
где WxГ , WyГ , WzГ – горизонтальные составляющие вектора путевой скорости;
Wx , Wy , Wz – составляющие вектора путевой скорости в связанной системе
координат;
υ – угол тангажа вертолета;
ψ – угол крена вертолета.
Величины углов крена ψ и тангажа υ поступают в преобразователь от
гировертикали. Преобразованные значения скоростей (рис. 2.40) позволяют
определить горизонтальную составляющую вектора путевой скорости и угол
сноса вертолета
arctg
WzГ
;
WxГ
(2.107)
W
WГ xГ ,
Cos
которые в дальнейшем используются для счисления пути.
Следует отметить, что в четырехлучевом измерителе (рис. 2.38) за счет
измерения разностных доплеровских частот по противоположным лучам
удается почти полностью компенсировать влияние эволюций самолета на
результаты измерения W и α .
Трехлучевой измеритель (рис. 2.39.), в котором измеряются доплеровские
частоты по каждому лучу, для устранения влияния углов крена и тангажа на
точность
0
WzГ
измерений
соответствии
α
требует
с
в
(2.106)
преобразования скоростей, то есть
WxГ
выполнения
V
вычислительных
процедур, что усложняет его. Но в
zГ
WГ
U
Рис. 2.40. Навигационный треугольник
скоростей в горизонтальной системе
координат
xГ
нем
измеряются
составляющие
скорости.
все
вектора
три
путевой
173
2.5.3. Спектр доплеровских частот
При полете самолета с постоянной скоростью должно возникать
единственное значение доплеровской частоты в соответствии с (2.84). Однако на
приемное устройство доплеровского измерителя поступает одновременно
некоторый спектр доплеровских частот. Это объясняется конечной, хотя и
небольшой (около 4-5º) шириной диаграммы направленности антенны. Поэтому
на земной поверхности одновременно облучается
некоторый ограниченный
участок. Все элементарные отражатели этого участка отражают сигнал.
Доплеровская частота электромагнитного колебания, отраженного от i-го
элементарного отражателя (при определенной скорости W), зависит от углов γi
и θi , под которыми он облучается (рис. 2.34).
Диапазон
изменения
этих
углов
определяется
шириной
ДНА
в
соответствующей плоскости:
0
Δ
Δ
;
i 0
2
2
0
Δ
,
i 0
2
2
где γ0 , θ0 – установочные углы антенны соответственно в вертикальной и в
горизонтальной плоскостях;
Δγ , Δθ – ширина ДНА антенны в вертикальной и в горизонтальной плоскостях.
Значение доплеровской частоты, отраженной от i-го элементарного
отражателя (считаем для простоты α = 0),
FДi
2W
Cos i Cos i .
Все элементарные отражатели, лежащие на некоторой изочастотной
линии, дают одинаковое значение доплеровской частоты, поэтому влияние
ширины диаграммы в плоскости углов θ на величину доплеровского спектра
частот невелико.
Ширина доплеровского спектра частот в плоскости углов γ с учетом (2.84)
и малости Δγ может быть определена в виде
174
ΔFД FДmin FДmax
4W
Δ 2W
Δ
Cos 0
Cos 0
2
2
2W
Sin 0 Sin
Δ
FД 0 Δtg 0 ,
2
(2.108)
где ΔFД – ширина доплеровского спектра частот;
FД0 – среднее значение доплеровской частоты, соответствующее углу γ0 .
Определим, от чего зависит амплитуда сигнала, отраженного от i-го
элементарного отражателя.
Рассмотрим сечение ДНА вертикальной плоскостью, проходящей через
ось луча (см. рис. 2.41, а). Отражающая площадка облучается с разной
интенсивностью, определяемой формой f(γ) диаграммы направленности.
Максимальная
отражатели,
напряженность
находящиеся
на
облучения
приходится
направлении
оси
ДНА
на
элементарные
(ее
максимума).
Напряженность облучения спадает к краям диаграммы направленности
(отражающей площадки).
Напряженность электромагнитного колебания, отраженного обратно к
доплеровскому измерителю, зависит от коэффициента обратного отражения (см.
рис. 2.41, б) ρ(μ) , а тот, в свою очередь, – от вида отражающей поверхности,
которая определяет характер отражения (диффузное или зеркальное).
Отраженный
от
поверхности
сигнал
поступает
на
доплеровский
измеритель через приемную антенну, направленные характеристики которой
идентичны передающей антенне. Следовательно, напряженность принятого
сигнала
Eпр (γ)
оказывается
пропорциональной
квадрату
функции
направленности антенны и коэффициенту обратного отражения от поверхности
Eпр ( ) Eизл f ( ) ( ) ,
2
(2.109)
где f(γ) – функция направленности антенны в вертикальной плоскости;
ρ(γ) – коэффициент обратного отражения.
175
а
ξ
γ′0 γ0
Δ
μ0
3
μ0 = 90º- γ0
3′
5
б
ρ(μ)
l
Суша
Δρ(μ) суша
Δρ(μ) море
Море
μдоп
в
μmin
μ0
μmax
μ
E(FД )
Суша
Море
ΔFД ср
FД0
Рис. 2.41. Образование доплеровского спектра частот:
а – ориентация основного и дополнительных лучей диаграммы;
б – зависимость коэффициента обратного отражения от угла падения;
в – огибающая доплеровского спектра частот
FД
176
Таким образом, каждому значению γ в пределах ширины диаграммы
направленности
антенны
соответствуют
свое
значение
напряженности
принятого сигнала и величина доплеровской частоты. Эта зависимость
изображена на рис. 2.41, в и показывает огибающую доплеровского спектра.
При диффузном отражении, присущем большинству поверхностей суши,
коэффициент обратного отражения не зависит от угла падения μi, который
связан с углом γi соотношением μi = 90º - γi . Таким образом, при диффузном
отражении коэффициент обратного отражения постоянен: ρ(μ) ≈ Const .
Поэтому огибающая спектра для суши повторяет форму ДНА по
мощности. Ее максимум совпадает с FД0 для угла γ0 , а форма огибающей спектра
симметрична.
Зеркальное отражение, характерное для спокойных водных поверхностей,
приводит к быстрому уменьшению ρ(μ) по мере увеличения угла падения μ
(уменьшения
угла
γ).
Следовательно,
максимум
огибающей
спектра
доплеровских частот для морских поверхностей смещается в сторону меньших
значений частот, соответствующих меньшим углам падения и, значит, большим
значениям коэффициента обратного отражения.
Кроме того, общая интенсивность отраженного от морской поверхности
сигнала уменьшается.
Смещение максимума доплеровского спектра при зеркальном характере
отражения на величину ΔFД ср приводит к занижению результатов измерения
путевой скорости над морем. Величина этого смещения зависит как от угла
наклона антенны γ0, так и от диапазона изменения Δρ(μ) значений коэффициента
обратного отражения в пределах ширины лепестка диаграммы направленности
антенны.
Закон изменения коэффициента обратного отражения ρ(μ) от угла падения
μi может быть аппроксимирован показательной функцией [20]:
(i ) ( 0 )ekΔ ;
Δμ = μi – μ0 ,
где Δμ – угол между осью ДНА и направлением на i-й отражатель;
(2.110)
177
μ0 – угол падения волны, соответствующий оси диаграммы;
k – коэффициент аппроксимации.
Коэффициент аппроксимации определяется [20] выражением
k 13,2
( ) ( )
,
max
min
max
(2.111)
min
где μmax , μmin – углы падения волны, соответствующие границам ширины ДНА;
ρ(μmax), ρ(μmin ) – значения коэффициента обратного отражения для углов падения
μmax и μmin , дБ.
Величина смещения ΔFД ср доплеровской частоты при полете над водной
поверхностью с учетом (2.110) и (2.111) будет
( Δ )
ΔFДср k
FД 0 ctg 0 ,
4
2
(2.112)
где FД0 – значение максимума спектра доплеровской частоты при диффузном
отражении;
Δγ – ширина ДНА в вертикальной плоскости;
γ0 – угол наклона оси диаграммы (установочный угол в вертикальной
плоскости);
k – коэффициент аппроксимации.
Для уменьшения величины этого сдвига спектра, как следует из (2.112),
необходимо уменьшать ширину диаграммы Δγ и увеличивать угол γ0 ее наклона.
Однако, как указывалось, компромисс между требованиями получения
достаточной мощности отраженного сигнала и допустимых значений ошибок
измерения ограничивает величину установочного угла γ0 диапазоном 50º–70º.
Поэтому основным методом уменьшения величины сдвига спектра при
зеркальном отражении является сужение ширины ДНА. У современных
доплеровских измерителей скорости она не превышает 5º.
Наличие смещения средней доплеровской частоты ΔFДср в сторону
меньших значений приводит к занижению измеренной путевой скорости в
соответствии с (2.84) на величину
ΔWср
ΔFДср
.
2Cos( )Cos 0
(2.113)
178
Возникновение смещения средней доплеровской частоты происходит и
при диффузном отражении (от суши) в силу того, что коэффициент обратного
отражения при этом не является величиной строго постоянной, не зависящей от
угла падения. Однако это смещение незначительно по сравнению со случаем
зеркального отражения.
Занижение результатов измерения путевой скорости может быть
скомпенсировано введением повышающей поправки в зависимости от характера
отражающей поверхности.
Однако определение конкретных значений характеристик отражения от
пролетаемых поверхностей, которые к тому же могут быстро изменяться,
затруднительно. Поэтому вводятся некоторые средние значения поправок для
земной и водной поверхностей, соответствующие наиболее вероятным
значениям.
При полете над земной поверхностью сдвиг спектра составляет [20]
примерно
0,09–0,72 % от его средней частоты. Поэтому средняя поправка
составляет 0,4 % FД0 .
Полет над водной поверхностью сопровождается сдвигом спектра в
диапазоне 0,9–2,3 % от его средней частоты, поэтому величина средней
поправки выбирается 1,7 % FД0 .
Использование средних значений поправок не позволяет полностью
компенсировать влияние сдвига спектра доплеровских частот.
Более точное значение поправки, которое в соответствии с (2.112) зависит
от коэффициента аппроксимации k , может быть получено путем использования
дополнительного луча ДНА (луч 3′ на рис. 2.41). Угол наклона этого луча 3′ в
вертикальной плоскости немного отличается от наклона основного луча 3.
Напряженности сигналов, принятых по этим лучам ДНА, в соответствии с
(2.109) отличаются (при прочих равных условиях) только за счет разного
значения коэффициентов обратного отражения ρ(γ) в силу разницы углов их
наклона γ0 ≠ γ′0 (рис. 2.41).
179
Сравнивая уровни сигналов основного и дополнительного лучей, с учетом
(2.110) получим
Eпр ( 0 ) ( 0 ) exp( k 0 )
.
Eпр ( 0 ) ( 0 ) exp( k 0 )
Отсюда можно определить уточненное значение аппроксимирующего
коэффициента в виде
k
Eпр ( 0 )
1
ln
.
0 0 Eпр ( 0 )
(2.114)
Эта величина k используется для определения уточненной поправки к
путевой скорости в соответствии с (2.112) и (2.113) в зависимости от
конкретного вида отражающей поверхности.
Применение такого метода усложняет антенную систему измерителя и
требует идентичности каналов приема по основному и дополнительному лучам.
В гражданской авиации он применения не нашел из-за сложности реализации.
Более простая разновидность этого метода используется для определения
вида отражающей поверхности и автоматизации процесса переключения
вводимой поправки к путевой скорости в зависимости от характера отражения.
При этом величины поправок для суши и моря не уточняются, а вводятся их
усредненные, заранее определенные значения. Автоматизация переключения
поправок в зависимости от вида отражающей поверхности особенно важна для
скоростных самолетов.
В этом методе тоже используется дополнительный луч ДНА (луч 5 на рис.
2.41), через который излучается и принимается непрерывное электромагнитное
колебание. Дополнительный луч ДНА находится в продольной плоскости
симметрии самолета (рис. 2.38), но наклонен под большим углом ξ, чем угол γ0
для основного луча.
Уровень сигнала, принятого дополнительным лучом 5, больше, чем лучом
3. Это объясняется большим значением коэффициента обратного отражения для
угла ξ (рис. 2.41, б), чем для угла γ0. Таким образом, сравнивая уровни принятых
сигналов по основному и дополнительному лучам ДНА, которые в первую
180
очередь зависят от величины коэффициента обратного отражения, можно
определить вид отражающей поверхности. При этом признаком смены вида
отражающей поверхности служит резкое изменение разности уровней сигналов
по основному и дополнительному лучам ДНА.
Действительно, как видно на
рис. 2.41, б, разница коэффициентов
обратного отражения по лучам 3 и 5 для земной поверхности Δρ(μ) суша заметно
меньше, чем для водной Δρ(μ) море. Поэтому большая разность уровней сигналов
по основному и дополнительному лучам ДНА является признаком отражения от
морской поверхности. Незначительная разность этих уровней присуща
отражению от земной поверхности.
Таким образом, изменение характера отражения сигнала от поверхности
может приводить к асимметрии спектра доплеровских частот и смещению его
максимума в сторону меньших значений частоты.
Возможен также эффект смещения доплеровского спектра частот в ту или
иную сторону без изменения его формы и ширины, который проявляется при
полете над морскими поверхностями, у которых присутствуют морские течения
(например, Гольфстрим в Атлантическом океане).
zг
Vт
Wzг
ΔWxт
Vт
W
α
φ
xг
Wxг
ΔWzт
Рис. 2.42. Возникновение горизонтальных составляющих
скорости самолета за счет течения
181
Доплеровский измеритель определяет свою скорость относительно
отражающей поверхности, а она из-за наличия течения будет отличаться от
значения
истинной
путевой
скорости,
которая
должна
определяться
относительно неподвижной поверхности земли (рис. 2.42).
Наличие составляющих скорости течения ΔWxт и ΔWzт в измеренной
величине вектора путевой скорости при счислении пути приводит к появлению
ошибок счисленных координат.
2.6. Методы измерения направлений
Для определения методов измерения направлений определим параметры
радиосигнала, зависящие от направления его прихода.
Строго говоря, ни один из параметров (амплитуда, частота, фаза,
временные
параметры)
от
направления
распространения
сигнала
непосредственно не зависит. Однако такая зависимость может быть создана
искусственно,
например,
с
помощью
антенны
с
направленными
характеристиками, описываемыми функциями направленности f(α,β) . Функция
направленности показывает зависимость амплитуды (или мощности) принятого
или излученного сигнала от отклонения направления его прихода относительно
некоторого направления, являющегося для данной антенны рабочим. Чаще
рабочим направлением антенны является направление ее максимума приема
(излучения).
Таким образом, при приеме сигнала направление прихода определяется
путем анализа амплитуды выходного сигнала антенны, которое зависит от
пространственной ориентации антенны относительно источника сигнала. Сама
ориентация антенны в пространстве определяется положением (углами
поворота) ее конструкционных осей. Обычно определяют направления
раздельно в горизонтальной (угол азимута) и вертикальной плоскостях (угол
места).
182
При излучении сигнала через направленную антенну в пространстве
можно создать поле радиосигнала, амплитуда которого закономерно изменяется
по некоторому закону в зависимости от направления относительно нее. При
этом часто используются вращающиеся направленные антенны.
Другим примером такой искусственной зависимости является разность
фаз Δφ одного и того же сигнала, принимаемого двумя (или более)
разнесенными в пространстве антеннами.
Фаза сигнала φ=ωt является функцией времени. Однако разность фаз Δφ
сигналов, принятых разнесенными антеннами, зависит от их ориентации
относительно источника сигнала. Это объясняется различным их удалением
(а значит, и различным временем распространения) от источника радиосигнала.
При излучении через разнесенные антенны специальных сигналов в
пространстве можно создать радионавигационное поле, в котором разность фаз
этих сигналов будет зависеть от направления.
Таким образом, существуют два основных метода измерения направлений,
связанных с параметром сигнала, несущего информацию о них:
амплитудный;
фазовый.
В амплитудном методе направление определяют путем измерения и
анализа амплитуды сигнала.
В фазовом методе направление определяют путем измерения разности фаз
Δφ двух сигналов, либо непосредственно фазометром, либо косвенно, по
изменению других параметров сигналов, зависящих от Δφ .
В силу того что фаза и частота сигнала связаны между собой (частота есть
производная от фазы по времени ω=dφ/dt ), можно измерять и анализировать
изменение частоты принятого сигнала. Аналогично для управления фазой
радионавигационного поля можно изменять частоту излучаемого сигнала.
Поэтому разновидностью фазового метода является доплеровский метод
измерения направления приема (используется в доплеровских АРП) или
создания направленного поля излучения (применяется в доплеровских
радиомаяках VOR).
183
От разности фаз двух сигналов одинаковой частоты зависит амплитуда
суммы
этих
сигналов,
которая
может
меняться
от
нулевой
(при
противофазности сигналов) до удвоенной (при синфазности). Поэтому
существует амплитудная разновидность фазового метода, используемая в
амплитудных АРП.
Возможны и комбинированные методы определения направления, в
которых используется зависимость амплитуды или фазы друг от друга или от
других параметров сигнала.
Одним из них является амплитудно-фазовый метод. В нем как в
амплитудном методе используется направленная антенна. Вращение этой
излучающей антенны приводит к амплитудной модуляции принятого на борту
ВС сигнала. Информация о направлении на источник сигнала при этом
заключена в фазе огибающей принятого амплитудно-модулированного сигнала
и измеряется фазометром как в фазовом методе. Такой метод положен в основу
действия стандартного радиомаяка VOR.
Другим комбинированным методом является амплитудно-временной.
В нем используется вращающаяся излучающая антенна, которая создает в
приемнике ВС импульсный сигнал в момент времени, когда рабочее
направление антенны совпадает с направлением на самолет. Информация о
направлении при этом заключена во временном интервале между принятым и
опорным импульсом (соответствующим прохождению антенны радиомаяка
через север). Такой метод реализован в угломерном канале РСБН.
Амплитудно-временной метод используется также в микроволновой
системе посадки MLS. При этом информация об угловом положении ВС
содержится во временном интервале между двумя принятыми на его борту
импульсами. Они создаются на самолете при прохождении мимо него
максимума узконаправленной диаграммы антенны наземного радиомаяка,
осуществляющего ее сканирование в прямом и обратном направлениях в своем
рабочем секторе.
184
Радионавигационные
устройства,
реализующие
указанные
методы
определения направления, подразделяются на две группы:
радиопеленгаторы,
принимающие
радиосигналы
и
определяющие
направление на его источник (в свою очередь, радиопеленгаторы могут
быть бортовыми и наземными);
радиомаяки, излучающие радиосигналы и создающие в пространстве
радионавигационное поле, параметры которого зависят от направления
относительно известного места их установки. Радиомаяки являются
источниками радиосигнала для радиопеленгаторов.
2.6.1. Амплитудные методы определения направления
В этих методах используются направленные свойства антенн. При этом за
направление на источник сигнала принимается рабочее направление антенны в
момент выполнения определенного условия, касающегося амплитуды ее
выходного сигнала.
Тогда, перемещая антенну в плоскости измеряемого угла, фиксируют его
значение в момент выполнения заданного условия.
В
зависимости
от
вида
этого
условия
различают
следующие
разновидности амплитудного метода:
метод максимума;
метод минимума;
метод сравнения (равносигнальный метод).
2.6.1.1. Метод максимума
При использовании метода максимума за направление на источник
сигнала (цель) принимается направление антенны
αц = αА при достижении
выходным сигналом антенны своего максимального значения UА = max (рис.
2.43).
185
Таким образом, перемещая антенну в пространстве, фиксируют ее угловое
положение в момент достижения выходным сигналом своего максимального
значения.
Вид ДНА, используемый в методе максимума, показан на рис. 2.43, а в
полярной системе координат, а на рис. 2.43, б – в прямоугольной системе.
Диаграмма направленности антенны описывается функцией F(Θ), где Θ – угол,
отсчитываемый от направления максимума. Рабочим направлением антенны в
данном случае является максимум ее диаграммы направленности, для которого
Θ =0.
Основным достоинством этого метода является получение на рабочем
направлении максимально возможного отношения мощностей сигнала и шума
за счет максимально возможного значения полезного сигнала. Это обеспечивает
большую дальность действия радиосистем и позволяет принимать в момент
определения направления дополнительную информацию, передаваемую с борта
пеленгуемого ВС.
UА
F(θ)
Umax 1
С
θ=0
б
а
Δu
θ=0
F(θ)
Δα
Δψ
αА
Δα
0
Umax
Δθ
Δu
в
d
dθ
Δθ
α
αА
F"(θ)
α
0
F'(θ)
Рис. 2.43. Метод максимума: а – диаграмма направленности антенны в полярной системе
координат; б – диаграмма направленности антенны в прямоугольной системе координат;
в – пеленгационная характеристика
186
Главным недостатком метода максимума следует считать его низкую
угловую
чувствительность.
Действительно,
при
достаточно
больших
отклонениях цели по углу Δα от рабочего направления (максимума ДНА)
уровень сигнала изменяется незначительно (рис. 2.43), что объясняется малой
крутизной изменения диаграммы направленности антенны в окрестностях ее
рабочего направления. Количественно крутизна ДНА (рис. 2.43, в) выражается
значением ее первой производной по углу (пеленгационной характеристикой)
dF()
F'(α) .
d
Выходной сигнал антенны в зависимости от угла Θ, который
отсчитывается от направления максимума ДНА,
UА (Θ) =Uc max F(Θ),
(2.115)
где Uc max – напряжение сигнала в направлении максимума диаграммы;
F(Θ) – нормированная ДНА.
Определим величину изменения сигнала при отклонении цели на угол Δα
от рабочего направления антенны [3]
Δu=[F(αА ) – F(αА + Δα)]Uc max .
Разложив F(αА + Δα) в ряд Тейлора в окрестностях рабочего направления и
ограничившись первыми тремя его членами, с учетом того, что
'
F(αА)│Δα = 0 =1 и F (αА )│Δα = 0 = 0 ,
получим следующее выражение для величины изменения выходного сигнала
антенны:
'
''
Δu= Uc max[F(αА ) – F(αА ) – (F (αА)Δα+0,5F (αА)Δα2)]=
''
= – 0,5Uc max F (αА)Δα2 .
(2.116)
Для того чтобы избавиться от влияния величины Uc max принимаемого
сигнала на величину приращения Δu, проведем ее нормировку и введем
коэффициент
угловой
чувствительности,
представляющий
собой
относительное изменение сигнала в окрестностях рабочего направления
Kуч = Δu ∕ Uc ,
где Kуч – коэффициент угловой чувствительности;
(2.117)
187
Δu – изменение сигнала;
Uc – величина выходного сигнала на рабочем направлении антенны.
Для метода максимума Uc = Uc max, и в соответствии с (2.116) и (2.117)
коэффициент угловой чувствительности
''
Kучmax = – 0,5 F (αА)Δα2 .
(2.118)
Переходя от конечных приращений в (2.116) к среднеквадратическим
''
погрешностям (СКП), получим [0,5 Uc max F (αА)]2 σα4 = σш2, откуда
2
F ( А )Q
,
(2.119)
где σα – СКП измерения угла;
σш – среднеквадратическое значение флуктуаций сигнала из-за шума;
F(α) – нормированная диаграмма направленности антенны;
Q = Uc max ∕ σш – отношение сигнал/шум.
Выражение (2.119) определяет точность измерения угла методом
максимума.
Определим теперь зону нечувствительности Δα (рис. 2.43), при которой
изменение выходного сигнала Δu не будет обнаруживаться. Считается, что
приращение сигнала может быть обнаружено, если его относительное
изменение не менее некоторой величины, то есть
Δu ∕ Uc max ≥ kпор ,
(2.120)
где Uc max – максимальная величина сигнала на рабочем направлении;
kпор – пороговый коэффициент относительного изменения сигнала, требуемый
для его обнаружения.
''
Подставив (2.116) в (2.120), получим: 0,5 F (αА)Δα2 = kпор , откуда
2k пор
,
F ( А )
(2.121)
а ширина зоны нечувствительности с учетом симметричности диаграммы
направленности Δψ = 2Δα .
188
При визуальном наблюдении по яркостному индикатору оператором
относительное изменение яркости уверенно обнаруживается, если величина
kпор = 0,05 – 0,1.
Из выражений (2.119) и (2.121) следует, что для повышения точности
измерения
угла
и
уменьшения
зоны
нечувствительности
необходимо
использовать узконаправленные антенны. Чем уже диаграмма направленности,
тем больше у нее крутизна (скорость) изменения ДНА.
Другим
недостатком
метода
максимума
является
невозможность
определить направление отклонения цели, что затрудняет автоматизацию ее
сопровождения. Действительно, отклонение в любую сторону от рабочего
направления (максимума ДНА) приводит только к уменьшению сигнала.
Впрочем, в некоторых случаях такое определение с помощью различных
технических приемов может быть осуществлено. Например, покачивая антенну
относительно рабочего направления, можно определить сторону смещения цели
по характеру изменения сигнала. Если сигнал при отклонении антенны в одну
сторону продолжает уменьшаться, значит, цель сместилась в противоположную
сторону, а если увеличивается, то направления смещения цели и антенны
совпадают.
Метод максимума широко используется в радиолокации, где для
обнаружения целей требуется большое значение отношения мощностей сигнала
и шума.
Кроме того, в этом методе обеспечивается прием дополнительной
информации с борта ВС при вторичной радиолокации.
Важной
характеристикой
радиолокатора,
использующего
метод
максимума, является разрешающая способность по угловым координатам.
Количественно разрешающая способность по углу определяется тем
минимальным углом между направлениями на две равноудаленные цели, при
котором они могут наблюдаться раздельно.
Действительно, если сигналы от двух целей Ц1 и Ц2 приходят на РЛС
одновременно, то они выводятся на одну развертку дальности индикатора и не
189
могут быть разделены. Это происходит (при одинаковой дальности до них), если
угловое расстояние Δφ между целями меньше, чем ширина диаграммы
направленности антенны ΔΘ .
Таким образом, потенциальная разрешающая способность по угловым
координатам определяется шириной ДНА в соответствующей плоскости
Δφ = αц2 – αц1 = ΔΘ ,
(2.122)
где Δφ – разрешающая способность по углу;
αц1 , αц2 – угловое положение первой и второй целей;
ΔΘ – ширина диаграммы направленности антенны.
Отсюда следует, что для улучшения разрешающей способности по углу в
какой-то плоскости необходимо уменьшать ширину диаграммы направленности
в этой плоскости. Однако уменьшение ширины ДНА приводит к уменьшению
сектора пространства, в котором радиолокатором обнаруживаются цели.
Поэтому, в зависимости от назначения РЛС, ширина диаграммы в разных
плоскостях может существенно различаться.
Так, у обзорных радиолокаторов, которым необходимо обнаруживать цели
в большом секторе по углу места с высокой разрешающей способностью по
азимуту, ДНА имеет веерную форму с большой шириной (до 45º) в
вертикальной плоскости и узкой (1º–2º) в горизонтальной. При этом разрешение
по углу места у него отсутствует. Радиолокаторы, которые предназначены для
одновременного измерения обоих угловых координат, имеют симметричную
игольчатую форму ДНА с шириной 1º–2º в обеих плоскостях.
2.6.1.2. Метод минимума
В методе минимума за направление на источник сигнала (цель)
принимается направление антенны αц = αА при достижении выходным сигналом
антенны своего минимального значения UА = min (рис.2. 44).
При
этом
диаграмма
направленности
антенны
имеет
вид
двух
соприкасающихся лепестков (рис. 2.44, а), и рабочим направлением является
направление между ними.
190
а
С
б
φ
F1(θ–φ)
F(θ)
UA
θ0
Umax 1
θ0
F1(θ–φ)
Δα
F2(θ+φ)
φ
αА
Δψ
Δu
F2(θ+φ)
в
α
0
Δα
d
dθ
φ
αА
φ
Umax
F'(θ)
Δu
α
0
Рис. 2.44. Метод минимума:
а, б – диаграммы направленности антенны соответственно в полярной и в прямоугольной
системе координат; в – пеленгационная характеристика
Первый лепесток ДНА описывается функцией F1(Θ–φ), второй – F2(Θ+φ).
Рабочему направлению соответствует угол φ=0,5ΔΘ , где ΔΘ – ширина ДНА по
нулевому уровню.
Главным
достоинством
метода
является
его
высокая
угловая
чувствительность. Это обусловлено большой крутизной изменения диаграммы
направленности антенны от угла (рис. 2.44, в) в области рабочего направления.
Выходной сигнал антенны при отсутствии помех и флуктуаций на
рабочем направлении равен нулю, так как F(Θ0) = 0 . При угловом смещении с
него в любую сторону на величину Δα произойдет возрастание сигнала на
величину Δu=[F(Θ0 + Δα) – F(Θ0)]Uc max .
Разложим F(Θ0 +Δα) в ряд Тейлора в окрестностях рабочего направления и
ограничимся первыми двумя членами разложения. Тогда с учетом того, что
F(Θ0) = 0, получим следующее выражение для величины изменения выходного
сигнала:
'
Δu= Uc max F (Θ0) Δα .
(2.123)
191
'
При этом значение первой производной F (Θ0) в (2.123) на рабочем направлении
максимально (рис. 2.44, в). Поэтому коэффициент угловой чувствительности для
метода минимума в соответствии с (2.117) и (2.123)
'
Kучmin = F (Θ0) Δα.
(2.124)
Переходя от конечных приращений в (2.123) к среднеквадратическим
'
погрешностям, получим [Uc max F (Θ0)]2 σα2 = σш2 , откуда среднеквадратическая
погрешность измерения угла методом минимума
1
,
F (0 )Q
(2.125)
где σα – СКП измерения угла;
σш – среднеквадратическое значение флуктуаций сигнала из-за шума;
F(Θ) – нормированная диаграмма направленности антенны;
Q = Uc max ∕ σш – отношение сигнал/шум.
При методе минимума также имеет место зона нечувствительности
(с угловым размером Δψ = 2Δα), поскольку необходима некоторая величина
приращения выходного сигнала Δu│> , которая может быть уверенно
обнаружена. Более того, это приращение должно превышать эффективное
напряжение внутренних шумов приемника. Таким образом, наличие шумов
несколько ухудшает потенциальную точность метода минимума.
Подставив
(2.123)
в
(2.120),
можно
определить
размер
зоны
нечувствительности (рис. 2.44, а), половина которой
k пор
.
F (0 )
(2.126)
Сравнивая (2.126) и (2.119), можно сделать вывод, что погрешность
измерения угла методом минимума меньше, чем методом максимума, так как
при
прочих
равных
условиях
'
''
F (Θ0) > F (αА)
в
окрестностях
рабочих
направлений антенн.
Методу минимума присущи и недостатки. Главным из них является
нулевое отношение мощностей сигнала и шума на рабочем направлении, что
192
ухудшает потенциально высокую точность измерений, уменьшает дальность
действия, не позволяет принимать полезный сигнал и, значит, контролировать
его наличие или пропадание после начала пеленгации.
Другим недостатком этого метода является невозможность определить
направление смещения источника сигнала от рабочего направления, так как его
смещение в любую сторону от рабочего направления приводит только к
увеличению принимаемого сигнала.
Однако в зависимости от конструкции антенны и метода формирования
двухлепестковой ДНА каждому из лепестков может быть придан какой-либо
признак
(например,
противофазность
несущего
колебания
для
разных
лепестков). Это позволяет в некоторых случаях, используя специальные
технические приемы, определять и сторону отклонения.
Метод минимума в силу своей потенциально высокой точности
определения направления широко используется в радионавигации для создания
бортовых радиопеленгаторов (АРК) и наземных радиомаяков (угломерный
канал РСБН).
2.6.1.3. Радиопеленгаторы, реализующие метод минимума
Самым распространенным в авиации бортовым радиопеленгатором,
основанным на измерении направления по методу минимума [11], является
автоматический радиокомпас (АРК).
В нем для создания двухлепестковой диаграммы направленности применяют
рамочную антенну. Вид ДНА рамочной антенны показан на рис. 2.45, а.
Диаграмма направленности описывается в зависимости от направления отсчета
углов выражением
Fр(α)= Cosφ = Sinα ,
где Fр(α) – нормированная диаграмма направленности рамочной антенны;
φ – угол, отсчитываемый от плоскости рамки;
α – угол, отсчитываемый от нормали к плоскости рамки.
193
а
б
II
α
III
Fр(α)
I
Fн(α)=1
+
φ
–
–
+
+
Рис. 2.45. Диаграмма направленности в полярной системе координат: а – рамочной;
б – рамочной и ненаправленной антенн
Диаграмма
направленности
рамочной
антенны
имеет
два
четко
выраженных минимума, ориентируя которые на источник сигнала получают
минимальные значения принятого сигнала. Однако наличие двух одинаковых
минимумов ДНА делает измерение неоднозначным с возможной ошибкой
пеленгации на 180º.
Сигналы, принимаемые противоположными лепестками ДНА рамочной
антенны, противофазны по несущей частоте. Это можно было бы использовать
для определения стороны прихода сигнала. Но на выходе приемника после
детектирования сигнала несущая частота отсутствует, что делает невозможным
использовать этот признак.
Избавиться
от
неоднозначности
определения
направления
можно,
используя совместно рамочную и ненаправленную антенны. Нормированные
диаграммы направленности этих антенн приведены на рис. 2.45, б.
Складывая сигналы этих антенн с учетом фазы принимаемых колебаний,
получим суммарную ДНА такой системы антенн в виде кардиоиды. Она
описывается выражением
F(α)= Fн(α)+ Fр(α)=1+ Cosφ = 1+ Sinα .
(2.127)
Такая суммарная диаграмма имеет один минимум, что обеспечивает
однозначность определения направления. Однако при этом отсутствует признак,
194
позволяющий определить направление смещения источника сигналов, что
делает невозможным автоматизацию процесса слежения за ним.
Современные автоматические радиокомпасы (АРК) также используют
совместно рамочную и ненаправленную антенны. Но перед сложением их
сигналов в АРК сигнал рамочной антенны подвергается предварительной
балансной модуляции низкой частотой FГОН от внутреннего генератора опорного
напряжения (ГОН).
Структурная схема автоматического радиокомпаса показана на рис. 2.46.
Рассмотрим происходящие в нем процессы в зависимости от направления
(I, II, III) прихода сигнала на рамочную антенну (рис. 2.45, а). Вид сигналов для
этих направлений в характерных точках АРК показан на рис. 2.47. Для большей
наглядности
будем
считать,
что
приводная
радиостанция
излучает
немодулированный сигнал, а все коэффициенты передачи и усиления в АРК
равны единице.
Вид сигнала eн(t) ненаправленной антенны ( рис. 2.47, а)
eн(t)= Eн Sin2πf0t ,
(2.128)
где Eн – максимальная амплитуда сигнала, принимаемая ненаправленной
антенной;
f0 – несущая частота принимаемого сигнала.
Ненаправленная
Рамочная
антенна
б
Балансный
модулятор
Компенсатор радиодевиации
ЭМ
антенна
а
ж
Схема
управления
г
д
Сумматор
ИКУ
Фазовый
детектор
в
Приемник
Амплитудн
детектор
Генератор
опорного
напряж.FГОН
е
Полосовой
фильтр FГОН
Заградит.
фильтр FГОН
FГОН
Рис. 2.46. Структурная схема автоматического радиокомпаса
195
I
II
III
Eн
а
t
1
f0
eр I
eр III
eр II = 0
б
t
t
t
в
t
t
t
0
π
π
г
t
t
t
eр III
Ен
eр I
д
t
t
1
FГОН
t
1
FГОН
е
t
eр I
ж
0
t
eр II = 0
t
t
t
t
- eр III
Рис. 2.47. Вид сигналов в автоматическом радиокомпасе
в характерных точках схемы
Его параметры не зависят от направления прихода сигнала. Примем
начальную фазу этого сигнала ψн = 0. Фаза сигнала, принятого рамочной
антенной, отличается от фазы облучающего электромагнитного колебания на
π/2. Этот фазовый сдвиг компенсируется в блоке рамочной антенны
фазовращателем.
Поэтому выходной сигнал рамочной антенны (рис. 2.47, б)
eр(t)= EрFр(α) Sin2πf0t = Eр Sinα Sin2πf0t ,
(2.129)
196
где Eр – максимальная амплитуда сигнала, принимаемая рамочной антенной;
Fр(α) – нормированная диаграмма направленности рамочной антенны.
В зависимости от направления выходной сигнал рамочной антенны будет
иметь разную амплитуду и фазу, что объясняется влиянием ее диаграммы
направленности Fр(α):
для направления I
eрI = Eр ; ψI = 0 ;
для направления II eрII = 0 ;
для направления III eрIII < eрI ; ψIII = π .
Генератор опорного напряжения вырабатывает напряжение с частотой Ω
(рис. 2.47, в), которым осуществляется балансная модуляция сигнала рамочной
антенны.
Балансно-модулированный сигнал
eрБМ(t)= Eр Sinα Sin2πFГОН t Sin2πf0t ,
(2.130)
в спектре которого отсутствует спектральная составляющая с несущей частотой
f0, показан на рис. 2.47, г. Фаза несущей частоты в соседних полуволнах
модулирующего сигнала отличается на π .
При сложении сигнала от ненаправленной антенны (2.128) и балансномодулированного сигнала (2.130) произойдет восстановление спектральной
составляющей несущей частоты f0 . Таким образом, суммарный сигнал будет
амплитудно-модулированным (рис. 2.47, д):
Eр
e(t) eн(t) e р(t) Eн 1
SinSin2FГОН t Sin2f0 t
Eн
(2.131)
с коэффициентом амплитудной модуляции
Eр
Sin MSin MFр() m() ,
Eн
(2.132)
зависящим от направления прихода сигнала α .
При этом коэффициент амплитудной модуляции суммарного сигнала с
точностью до множителя M= Eр / Eн совпадает с ДНА рамочной антенны Fр(α) .
После амплитудного детектирования суммарного сигнала с выхода
приемника будет получена его огибающая (рис. 2.47, е)
197
uΣ(t)= Eн M Sinα Sin2πFГОН t = Eр Sinα Sin2πFГОН t .
(2.133)
º
º
При этом для правой полуплоскости (рис. 2.45, а) 0 < α <180 : фаза
огибающей совпадает с фазой модулирующего сигнала ГОН.
Для
левой
полуплоскости
º
180 <
α
º
<360 :
огибающая
сигнала
противофазна модулирующему сигналу.
Амплитуда огибающей сигнала (2.133) определяется значением Sinα , то
есть она пропорциональна величине углового отклонения источника сигнала от
направления минимума ДНА рамочной антенны (для которой α = αII = 0):
для направления I
SinαI =1; uрI = Eр ; ψI = 0 ;
для направления II
SinαII =0 ; uрI = 0 ;
для направления III
SinαIII <1 ; uрIII = –Eр SinαIII ; ψIII = π .
Таким образом, введение балансной модуляции сигнала рамочной
антенны перед сложением его с сигналом ненаправленной антенны позволило
перенести признак стороны приема сигнала с фазы несущей (которая
отсутствует после амплитудного детектирования) на фазу огибающей.
Для автоматического слежения минимума ДНА рамочной антенны за
направлением прихода сигнала схема управления вырабатывает напряжение
(рис. 2.47, ж), поступающее на электромотор, вращающий рамочную антенну.
Амплитуда управляющего напряжения пропорциональна амплитуде
огибающей суммарного сигнала, а полярность напряжения определяется
фазовым детектором путем сравнения фаз опорного напряжения и огибающей.
При
совпадении
фаз
управляющее
напряжение
положительно,
а
при
противофазности отрицательно, что обеспечивает вращение электромотора в
разные стороны. При совпадении направления минимума ДНА рамочной
антенны с направлением прихода сигнала (направление II на рис. 2.45, а)
амплитуда управляющего сигнала равна нулю, и электромотор останавливается.
Таким образом, осуществляется автоматическое слежение за направлением
прихода сигнала. В установившемся режиме слежения сигналы в АРК
соответствуют направлению II на рис. 2.47.
198
Для подавления опорного сигнала при прослушивании позывных сигналов
приводной станции используется заградительный (режекторный) фильтр, не
пропускающий частоту FГОН . Для уменьшения влияния позывных сигналов на
точность измерения угла перед фазовым детектором стоит полосовой фильтр,
пропускающий только опорный сигнал с частотой FГОН .
2.6.1.4. Метод сравнения (равносигнальный)
За направление прихода сигнала в методе сравнения принимается
направление антенной системы αц = αА в момент равенства двух сигналов
U1 = U2 , принятых двумя антеннами, диаграммы направленности которых
смещены по углу на величину 2φ относительно друг друга и пересекаются в
пространстве (рис. 2.48, а).
Рабочим направлением при этом является направление, проходящее через
точку пересечения ДНА, называемое равносигнальным направлением (РСН).
Основным
достоинством
данного
метода
является
возможность
определения стороны смещения источника сигнала от РСН. Это осуществляется
путем сравнения между собой сигналов двух антенн. Так, разность их сигналов
ΔU = U2 – U1:
равна нулю ΔU = 0 на равносигнальном направлении;
больше нуля ΔU > 0 при смещении влево и
меньше нуля ΔU <0 в противоположном направлении.
Для определения угловой чувствительности метода сравнения необходимо
оценить характер изменения разностного сигнала при отклонении от
равносигнального направления.
Равносигнальное
направление
образовано
пересечением
двух
симметричных диаграмм направленности антенн, описываемых уравнениями
F1(Θ) и F2(Θ+2φ) .
199
а
UA
б
F(θ)
РСН
Umax 1
С
φ
F1(θ)
F2(θ+2φ)
F1(θ)
РСН
Δu
φ
Δα
Δψ
αА
F2(θ+2φ)
α
0
в
Δu
αА
Δα
d (F (θ) -F (θ))
2
1
dθ
φ φ
ΔU < 0
Umax
ΔU > 0
α
ΔU = 0
0
Рис. 2.48. Метод сравнения: а, б – диаграммы направленности антенн в полярной и в
прямоугольной системе координат соответственно; в – пеленгационная характеристика
Тогда сигналы этих антенн на равносигнальном направлении, для
которого Θ = φ у первой антенны и Θ = - φ у второй, будут:
U1 = U2 = Uc max F(φ) ,
(2.134)
где Uc max – напряжение сигнала в направлении максимума ДНА;
F(φ) – значение ДНА на равносигнальном направлении (F(φ)<1).
При отклонении от РСН на малый угол Δα разностный сигнал с учетом
(2.134) Δu=U1 – U2=[F(φ + Δα) – F(φ – Δα)]Uc max .
После разложения U1 и U2 в ряд Тейлора, ограничиваясь двумя первыми
его членами, получим
'
'
'
Δu=Uc max[F(φ)+ΔαF (φ)]–Uc max[F(φ) –ΔαF (φ)]=Uc max[2ΔαF (φ)] ,
(2.135)
где Δα – величина отклонения от равносигнального направления;
'
F (φ) – первая производная по углу (крутизна) нормированной ДНА на
равносигнальном направлении.
200
Коэффициент угловой чувствительности равносигнального метода в
соответствии с (2.117), (2.134) и (2.135)
рс
K уч
2 ΔF ()
.
F()
(2.136)
Точку пересечения диаграмм, с одной стороны, выбирают таким образом,
чтобы крутизна их изменения была близка к линейной. С другой стороны,
значение нормированной диаграммы в этой точке было близко к единице.
Поэтому
метод
сравнения
обеспечивает
достаточно
высокое
значение
отношения мощностей сигнала и шума (хотя и меньшее, чем метод максимума).
Подставив (2.135) в (2.120), можно определить размер Δψ=2Δα зоны
нечувствительности (рис. 2.48.а), половина которой
Δ
Возможность
легкого
k пор
.
2 F ( )
(2.137)
определения
стороны
уклонения
от
равносигнального направления обусловило применение этого метода в
радиомаячных системах посадки метровых волн. На равносигнальном методе
определения
угловых
координат
основан
также
принцип
действия
моноимпульсной радиолокации, позволяющий по одному сигналу определять
сразу две угловые координаты цели.
2.6.1.5. Радиомаячная система посадки, задающая
направление равносигнальным методом
В состав радиомаячной системы посадки метровых волн (ILS) входят
курсовой (КРМ) и глиссадный (ГРМ) радиомаяки, которые задают в
пространстве
плоскость
посадочного
курса
и
плоскость
снижения
соответственно. Пересечение этих плоскостей образует траекторию посадки.
Эти плоскости сориентированы в пространстве таким образом, что проходят
через равносигнальные направления, задаваемые курсовым и глиссадным
маяками.
В курсовом радиомаяке [11] равносигнальное направление (РСН) задается
пересечением двух ДНА (рис. 2.49), которое совпадает с осью взлетнопосадочной полосы (ВПП).
201
Амплитудный
модулятор
FС (Θ)
F1(Θ)
F2(Θ)
90 Гц
Генератор
НЧ (150Гц)
f0
Генератор
ВЧ
f1
Генератор
НЧ (90 Гц)
A2
Делитель
мощности
150 Гц
f2
A1
Амплитудный
модулятор
Рис. 2.49. Структурная схема курсового радиомаяка равносигнального типа
Радиомаяк излучает через каждую из диаграмм непрерывное колебание на
несущей частоте f0 = 108 - 111,975 МГц. Для того чтобы сигналы этих антенн в
дальнейшем можно было разделить в приемнике, каждый из них модулируется
по амплитуде (рис. 2.49) вспомогательными тональными сигналами низкой
частоты f1 = 90 Гц и f2 = 150 Гц.
На самолет поступают сигналы обеих антенн в виде
e90(t)=Em F1(Θ)[1+ mCos2πf1t]Cos2πf0t ;
e150(t)=Em F2(Θ)[1+ mCos2πf2t]Cos2πf0t ,
где F1(Θ), F2(Θ) – диаграммы направленности первой и второй антенн;
Em – амплитуда сигнала;
m – коэффициент амплитудной модуляции.
Тогда суммарный сигнал этих антенн, принятый на самолете,
eС(t)= e90(t)+ e150(t)=
F ()
F ()
Em FC()1 m 1
Cos2f1t m 2
Cos2f 2t Cos2f0 t ,
FC()
FC()
(2.138)
где FС(Θ) = F1(Θ)+ F2(Θ) – суммарная ДНА антенной системы радиомаяка.
202
f1 = 90 Гц
КРМ
I
–Θ
Θ
II
III
f2 = 150 Гц
I
m90(Θ) > m150(Θ) РГМ<0
-f1
e90(t)
t
+f1
-f2
e1( t )
e150
e0 2(t)
( t)
f
f0
t
+f2
f
f0
e0 3( t )
-f1 +f1
eС(t)
t
-f2 f0 +f2
f
t
II
m90(Θ) = m150(Θ) РГМ=0
e90 (t)
-f1
t
+f1
-f2
e1( t )
t
e150
e0 2((t)
t)
f
f0
+f2
f
f0
e0 3( t )
-f1 +f1
eС(t)
t
f
-f2 f0 +f2
t
III
m90(Θ) < m150(Θ) РГМ>0
e90 (t)
-f1
t
-f2
+f1
f0
f
+f2
e1( t )
e150
e0 2((t)
t)
t
e0 3( t )
eС(t)
t
f0
-f1 +f1
-f2 f0 +f2
t
Рис. 2.50. Вид сигналов системы посадки ILS равносигнального типа,
принимаемых на самолете, при разных значениях углового отклонения
от линии посадочного курса
f
f
203
Суммарный сигнал оказывается модулированным по амплитуде двумя
вспомогательными сигналами низкой частоты f1 и f2 . Коэффициенты модуляции
m90(Θ) и m150(Θ) для каждой из частот при этом зависят от угла Θ:
m90() m
F1()
;
F1() F2()
m150() m
F2()
.
F1() F2()
(2.139)
Вид этих сигналов и их спектры для различных отклонений ВС от
равносигнального направления показаны на рис. 2.50. В зависимости от
величины и направления (см. рис. 2.50) отклонения ВС от оси ВПП амплитуда и
глубина модуляции изменяются каждым из вспомогательных сигналов с
частотами f1 и f2 . При отклонении ВС влево от посадочного курса преобладает
сигнал с частотой модуляции 90 Гц, а при отклонении вправо – сигнал с
частотой модуляции 150 Гц. На равносигнальном направлении эти сигналы
равны между собой. Таким образом, сравнивая на борту ВС сигналы с разными
частотами модуляции между собой, можно определить величину и направление
отклонения воздушного судна от равносигнального направления (оси ВПП).
Разница
коэффициентов
модуляции
F(Θ)
m90(Θ) и m150(Θ) этими сигналами,
FС (Θ)
называемая также разностью глубин
F2(Θ)
F1(Θ)
модуляции (РГМ), зависит от углового
отклонения
Θ
самолета
от
равносигнального направления, а ее
знак
показывает
–Θ
–ΘI
направление
РГМ(Θ)= m150(Θ) – m90(Θ)
отклонения.
Формирование разности глубин
m150(Θ)
модуляции в зависимости от величины
0,5m
уклонения
воздушного
судна
от
посадочного курса показано на (рис.
2.51).
Разность
радиомаяке
глубин
модуляции
равносигнального
в
типа
Θ
0
–Θ
РГМ(Θ)
m90(Θ)
0
РГМ(–ΘI)
– РГМ
Рис. 2.51. Зависимость РГМ
от направления в сигнале КРМ
Θ
204
определяется выражением
РГМ() m150() m90() m
F2() F1()
.
F1() F2()
(2.140)
Величина РГМ измеряется в бортовом приемном оборудовании системы
посадки (рис. 2.52).
На
выходе приемника получается
усиленный
суммарный
сигнал
радиомаяка eС(t). После амплитудного детектирования из него выделяется
огибающая суммарного сигнала uС(t), содержащая обе частоты модуляции f1 и
f2. Далее полосовыми фильтрами она разделяется по частоте модуляции на два
разных канала. При этом амплитуда сигналов u90(t) и u150(t) определяется
величиной коэффициента модуляции, то есть u90(t) ~ m90(Θ) и u150(t) ~ m150(Θ).
После выпрямления переменные напряжения u90(t) и u150(t) преобразуются в
постоянные U90 ~ u90(t) и U150 ~ u150(t) , пропорциональные амплитуде сигналов
этих частот модуляции. Эти постоянные напряжения подаются на стрелочный
индикатор (являющийся микроамперметром) навстречу друг другу, что
обеспечивает измерение их разности
ΔU=U150 –U90 ~ [m150(Θ)-m90(Θ)].
Таким образом, отклонение стрелки бортового индикатора курсового
радиоприемника системы посадки ILS оказывается пропорциональным разности
глубин модуляции РГМ = m150(Θ) – m90(Θ) , зависящей от углового отклонения
Θ самолета от посадочного курса (соответствует случаю II на рис. 2.50).
Угловое отклонение самолета от плоскости снижения по вертикали
определяется по сигналам глиссадного радиомаяка (ГРМ). ГРМ и глиссадный
бортовой радиоприемник по принципу действия и структуре аналогичны
изображенным на рис. 2.49 и 2.52 для курсового канала. Отличие их
заключается в использовании сигналов несущей частоты в другом частотном
диапазоне f0 = 328,6 – 335,4 МГц и другой конструкции антенной системы ГРМ.
205
Для создания пересекающихся лепестков ДНА используются две антенны,
подвешенные над поверхностью земли на разных высотах h1 и h2. Антенны,
находящиеся над отражающей поверхностью, создают многолепестковые ДНА,
состоящие из соприкасающихся лепестков. Диаграммы направленности таких
антенн описываются выражением
2h
(2.141)
F ( ) Sin
Sin ,
где h – высота подвеса антенны;
λ – длина волны.
90 Гц
eС(t)
u90(t)
t
t
Полосовой
фильтр f1
Амплитуд.
детектор
Приемник
eС(t)
uС(t)
t
U90
U90 ~ m90(Θ)
Выпрямитель
u90(t)
ΔU
uС(t)
u150(t)
Полосовой
фильтр f2
t
Выпрямитель
U150 ~ m150(Θ)
150 Гц
t
u150(t)
U150
t
|F2(β)|
+
h1
h2
РСН3
+
–
РСН2
–
+
+
βгл
РСН1
0,75
βрсн6
βрсн5
βрсн4
+
РСН4
–
А2
1,0
РСН5
|F1(β)|
А1
|F(β) |
βрсн3
РСН6
βгл
βрсн2
Рис. 2.52. Структурная схема бортового приемного оборудования
системы посадки ILS и сигналы в нем
|F1(β)|
+
– –
+
+
–
|F2(β)|
0,5
0,25
0
º
º
0
30
60
90
Рис. 2.53. Образование равносигнальных направлений ГРМ системы посадки
ILS равносигнального типа
º
β
206
Так как антенны находятся на разных высотах, то количества лепестков
диаграмм, а, значит, и их ширина будут для них различны. Такие диаграммы
создадут в пространстве набор пересекающихся лепестков (см. рис. 2.53),
образующих несколько равносигнальных направлений.
Нижнее
равносигнальное
направление
задает
истинную
глиссаду
снижения, а остальные РСН являются ложными глиссадами.
Определим углы наклона βрсн равносигнальных направлений.
Эти
углы
удовлетворяют
условию
равенства
значений
модулей
нормированных диаграмм направленности антенн А1 и А2 глиссадного
радиомаяка │F1(βрсн)│=│F2(βрсн)│, описываемых выражением (2.141).
Для их нахождения необходимо решить относительно βрсн уравнение вида
| Sin 2h1 Sin рсн |–| Sin 2h2 Sin рсн |= 0 .
(2.142)
Преобразуем разность синусов в их произведение и приравняем нулю
каждый
из
полученных
сомножителей.
Соседние
лепестки
диаграммы
направленности каждой из антенн противофазны по несущей частоте
(обозначено на рис. 2.53 знаками «+» и «–» ). Вместе они образуют различные
комбинации фаз пересекающихся лепестков.
Поэтому решениями уравнения (2.142) будут:
для пересечения синфазных лепестков
(h h ) Sin рсн n
1 2
и
(h1 h2 ) Sin рсн n ;
2
для пересечения противофазных лепестков
(h h ) Sin рсн n
1 2
и
(h1 h2 ) Sin рсн n ;
2
n = 0, 1, 2, .... .
Истинной глиссадой снижения всегда является нижнее равносигнальное
направление, которому соответствует пересечение синфазных лепестков обоих
ДНА (при n=0). Отсюда угол наклона глиссады, выраженный в градусах,
гл
arcsin
,
2(h1 h2 )
180
(2.143)
207
где λ – длина волны;
h1 , h2 – высота подвеса антенн.
Нижняя
ложная
глиссада
(второе
равносигнальное
направление)
образуется пересечением противофазных лепестков (при n=0 для F1(β) и n=1
для F2(β)).
Тогда угол наклона нижнего равносигнального направления
180
рсн 2
arcsin
.
h
h
1 2
(2.144)
Количество лепестков диаграмм обоих антенн и их ширина по углу места
будут различны из-за разной высоты подвеса. Это приводит к нелинейности
изменения величины РГМ (2.140) глиссадного радиомаяка в зависимости от
угла Δβ отклонения самолета от глиссады снижения (рис. 2.54). Это является
недостатком ГРМ равносигнального типа.
ДНА
(в
курсового
отличие
от
радиомаяка
F(β)
глиссадного)
симметричны (рис. 2.51), и поэтому
зависимость
РГМ
от
FС (β)
величины
отклонения ВС от посадочного курса у
F1(β)
него линейна.
F2(β)
Из выражения (2.143) следует,
что угол наклона глиссады зависит от
высот h1 и h2 подвеса антенн над
m90(β)
Отражающей поверхностью для
m150(β)
ОВЧ-диапазона волн, используемого в
только непосредственная поверхность
земли, но и поверхность снежного и
травяного покрова на ней. Наличие
снежного
и
травяного
покрова
β
βгл
РГМ(β)= m150(β) – m90(β)
отражающей поверхностью.
системах посадки ILS, являются не
–ΔβI
0
0,5m
–Δβ
0
РГМ(–ΔβI)
Δβ
–РГМ(β)
Рис. 2.54. Зависимость РГМ от направления
в ГРМ равносигнального типа
208
толщиной Δh приводит к
4,2 4.2
уменьшению действительной
4,1 4.1
высоты подвеса каждой из
4,0 4
3,9 3.9
антенн
3,8 3.8
поверхностью
на
величину,
вызывает
Равносигнальный
ã3,7
( h )3.7
3,6 3.6
ã ( h )
3,5 3.5
над
отражающей
что
эту
изменение задаваемого угла
наклона
3,4 3.4
С опорным нулем
3,3 3.3
3,2 3.2
Δh , м
3,1 3.1
3,0 3
00
0.1 0.2
0.3 0.4
0.5 0.6 0.7
0.8 0.9
1
1.1
1.2
h
Рис. 2.55. Зависимость изменения угла наклона
глиссады от высоты снежного
и травяного покрова
гл ( Δh)
Зависимость
глиссады
угла
наклона
равносигнального
ГРМ от высоты Δh снежного
и травяного покрова (рис.
2.55) можно получить
из
выражения (2.143) в виде
arcsin
.
2([ h1 Δh] [h2 Δh])
180
глиссады.
(2.145)
Для уменьшения такого влияния вокруг антенных систем радиомаяков
системы посадки ILS выделяются регламентированные зоны, в пределах
которых ограничивается высота снежного и травяного покрова, неровности
поверхности земли и не допускается наличие посторонних предметов,
переотражающих сигнал радиомаяка.
Сильное влияние переотраженных сигналов на точность задания
траектории посадки является главным недостатком системы посадки
ILS
метрового диапазона волн.
2.6.1.6. Радиомаячная система посадки повышенной точности
Радиомаячные системы посадки II и III категорий должны обеспечивать
высокую стабильность и точность задания траектории посадки, чего радиомаяки
209
равносигнального типа обеспечить не могут. Для обеспечения требуемых
характеристик задаваемой системой посадки траектории применяются так
называемые радиомаяки с опорным нулем [11].
При этом плоскости посадочного курса и снижения по-прежнему задаются
как равносигнальные направления, но формируются они по-другому.
Рассмотрим принцип действия радиомаяков с опорным нулем на примере
курсового радиомаяка (КРМ). Структурная схема курсового радиомаяка
показана на рис. 2.56.
Диаграмма направленности антенны А1
имеет один лепесток, максимум
которого совпадает с осью ВПП. Диаграмма второй антенны А2 состоит из двух
соприкасающихся лепестков вдвое меньшей ширины, направленных своим
минимумом вдоль оси ВПП.
Через антенну А2 излучается разностный (за счет введения в него
фазового сдвига на π с помощью фазовращателя) балансно-модулированный
сигнал с подавленной несущей и частотами модуляции f1 = 90 Гц и f2 =150 Гц
eΔ(t)=Em2 F2(Θ)[ Cos2πf1t - Cos2πf2t]Cos2π f0t ,
(2.146)
где eΔ(t) — разностный сигнал;
F2(Θ) — диаграммы направленности второй антенны;
Em2 — амплитуда сигнала, излучаемого второй антенной.
Антенна А1 излучает суммарный (за счет восстановления в спектре
несущей составляющей сигнала с помощью сумматора 2) амплитудномодулированный сигнал с теми же частотами модуляции f1 и f2 :
F1(Θ)
A2
F2(Θ)
Балансный
модулятор
Сумматор 1
F2(Θ)
Фазовращатель π
Балансный
модулятор
Генератор
НЧ (150Гц)
Генератор
ВЧ
f0
Сумматор 2
А1
f2
f1
Генератор
НЧ (90 Гц)
Рис. 2.56. Структурная схема курсового радиомаяка с опорным нулем
210
eΣ(t)=Em1 F1(Θ)[1+ mCos2πf1t + mCos2πf2t]Cos2πf0t ,
(2.147)
где eΣ(t) — суммарный сигнал;
F1(Θ) — диаграммы направленности первой антенны;
Em1 — амплитуда сигнала, излучаемого первой антенной;
m — коэффициент амплитудной модуляции.
При этом напряженность сигнала, излучаемого первой антенной, в два
раза больше, чем излучаемого второй антенной Em1 =2 Em2 .
Сигналы обеих антенн, складываясь, будут иметь вид амплитудномодулированного частотами модуляции f1 и f2 колебания
ec (t ) e(t) e(t)
E F ()
E F ()
Em1 F1()1 m m2 2 Cos2f1t m m2 2 Cos2f 2t Cos2f0 t . (2.148)
Em1 F1()
Em1 F1()
Таким образом, в пределах диаграмм направленности F1(Θ) и F2(Θ) обеих
антенн одновременно присутствуют сигналы с частотами модуляции f1 и f2
(рис. 2.57). В то же время в пространстве могут быть выделены две ДНА F90(Θ)
и F150(Θ) для каждого из сигналов модуляции раздельно.
Коэффициенты глубины модуляции сигнала ec(t) частотами f1 и f2 зависят
от угла Θ и имеют следующий вид (см. рис. 2.58):
E F ()
E F ()
m90() m m2 2
m150() m m2 2
;
.
Em1 F1()
Em1 F1()
F2(Θ)
90
F90(Θ)
f
f0
f
150
F150(Θ)
150
f0
f0
F1(Θ)
f
90
90
f
F2(Θ)
90
150
90
90
F(Θ)
150
f
f0
150
f0
90
150
150
90
150
(2.149)
0
Θ
Рис. 2.57. Диаграммы направленности антенной системы КРМ
с опорным нулем и спектры сигналов в них
211
Разность глубин модуляции (РГМ)
F(Θ)
содержит информацию о величине
и
направлении
F1(Θ)
отклонения
самолета от траектории посадки
(рис. 2.58)
F ()
.
РГМ() m150() m90() 2
F1()
F2(Θ)
F2(Θ)
+
–
Θ
-Θ
0
РГМ(Θ)= m150(Θ) – m90(Θ)
(2.150)
Глиссадный
опорным
нулем
курсового
радиомаяк
с
отличается
от
другим
частотным
m150(Θ)
m
-Θ
0
m90(Θ)
диапазоном излучаемых сигналов и
конструкцией антенной системы.
Для
создания
пересекающихся лепестков ДНА
используются
две
антенны,
Θ
РГМ(Θ)
Рис. 2.58. Зависимость РГМ и коэффициентов
модуляции от направления в КРМ с опорным
нулем
подвешенные над поверхностью земли на высотах h1 и h2. Высота расположения
верхней антенны в два раза больше, чем нижней: h2 =2h1 . Это в соответствии с
(2.141) делает ширину ее лепестков в два раза меньше, а их количество больше
(см. рис. 2.59).
Угол наклона глиссады при этом совпадает с направлением максимума
первого лепестка нижней антенны (минимума между первым и вторым
лепестками верхней антенны):
гл
180
arcsin
arcsin
,
4 h1
2h2
180
где βгл — угол наклона глиссады, град;
λ — длина волны;
h1 , h2 — высоты подвеса нижней и верхней антенн.
(2.151)
βгл
|F(β)|
А2
А1
|F1(β)|
1,0
E1
+
E2
βрсн2
212
|F1(β)|
0,75
РСН2
–
+
|F2(β)|
–
РСН1
2h1 h1
+
11
+
0,5
βгл
|F2(β)|
0,25
+
–
–
+
0
0
30
º
+
º
60
º
β
90
Рис. 2.59. Образование равносигнальных направлений ГРМ
системы посадки ILS с опорным нулем
При
наличии
снежного
или
травяного
покрова
толщиной
Δh
действительная высоты подвеса антенн над отражающей поверхностью
уменьшается. Поэтому направления максимума диаграммы F1(β) и минимума
диаграммы F2(β) не совпадают, а ширина их лепестков при этом увеличивается.
Это приводит к смещению направления задаваемой маяком глиссады снижения.
Определим зависимость угла наклона глиссады βгл от высоты снежного
или травяного покрова Δh для глиссадного радиомаяка с опорным нулем.
Величина РГМ на глиссаде равна нулю. Тогда в соответствии с (2.150)
РГМ(βгл)= F2(βгл)/F1(βгл)=0. Это условие может быть выполнено (в силу того, что
F1(βгл) ≠ 0) только при F2(βгл)=0. Отсюда из (2.151) следует, что
( Δh)
гл
arcsin
.
2(h2 Δh)
180
(2.152)
График зависимости (2.152) угла наклона глиссады βгл от высоты Δh
снежного или травяного покрова для глиссадного радиомаяка с опорным нулем
показан на рис. 2.55. На нем видно, что величина смещения угла наклона
глиссады для ГРМ с опорным нулем меньше, чем для равносигнального
радиомаяка.
213
2.6.1.7. Уменьшение влияния переотражений волн на точность
задания траектории посадки. Двухканальные радиомаяки
Радиоволны метрового диапазона, используемые в системах посадки ILS
(λ≈0,9 м для ГРМ и λ≈2,7 м для КРМ), хорошо отражаются от местных
предметов, находящихся в зоне излучения, размеры которых соизмеримы с
длиной волны или больше ее.
Поэтому на приемник самолета приходят прямая и отраженная от местных
предметов волны, что, с учетом их фазовых и амплитудных различий, приводит
к изменению суммарной амплитуды принятого сигнала. Траектория посадки
задается как равносигнальная линия, на которой равны амплитуды сигналов
модуляции 90 и 150 Гц. Поэтому задаваемая траектория из-за влияния
переотраженных волн искривляется и не представляет собой прямую линию.
Требования, предъявляемые к точности задания и допустимым искривлениям
посадочной траектории, очень жесткие. По нормам ICAO для систем посадки II
и III категорий максимально допустимые искривления (с вероятностью 0,95) не
должны превышать [15]:
для линии курса — величину 0,005 РГМ (боковое смещение над порогом
ВПП не более ±5 м);
для линии глиссады — величину 0,02 РГМ (вертикальное смещение на
высоте 15 м не более ±1,2 м).
Основным методом уменьшения влияния переотражений на точность
задания посадочной траектории является устранение местных предметов из зон,
облучаемых радиомаяками. Для этого вблизи антенных систем КРМ и ГРМ
выделяются так называемые регламентируемые зоны, в пределах которых
недопустимо наличие местных предметов, а также ограничены уклон и высота
рельефа местности и толщина травяного и снежного покровов. Так, например,
высота травы и снега не должна превышать 0,2 м для систем посадки III
категории.
214
Существует также критическая зона ILS, включающая в себя ВПП и
близлежащие участки рулежных дорожек, нахождение в которой посторонних
предметов (в том числе ВС на ВПП) приводит к недопустимым искажениям
задаваемой траектории посадки.
Выполнение таких жестких требований к окружающей радиомаяки
местности трудновыполнимо и усложняет эксплуатацию систем посадки ILS.
Непрерывный характер излучения радиомаяков не позволяет применять
никаких методов селекции переотраженных волн, кроме пространственной
селекции с использованием направленных диаграмм антенн. То есть для
уменьшения влияния местных предметов необходимо сужать сектор облучения
(±10° относительно оси ВПП), уменьшая ширину ДНА (в первую очередь —
курсового радиомаяка). Это позволяет обеспечить отсутствие местных
предметов в таком узком секторе, тем самым уменьшая величину искривлений
задаваемой траектории.
В то же время от системы посадки требуется широкий сектор зоны
действия (±35° относительно оси ВПП), в пределах которого на борту ВС может
быть определено направление его отклонения (знание величины отклонения в
нем не требуется). Исключить наличие отражающих объектов в таком широком
секторе вообще невозможно.
Для выполнения таких противоречивых требований по большой ширине
зоны действия и высокой точности задаваемой посадочной траектории
применяются двухканальные радиомаяки. Они имеют раздельные антенные
системы для создания широкого и узкого секторов зон действия.
Таким образом, информация широкого канала (называемого также
каналом клиренса) позволяет вывести самолет в зону действия узкого канала, в
котором обеспечивается точное измерение углового отклонения ВС от
посадочного курса.
При этом необходимо, чтобы излучение широкого канала (ШК) не влияло
на работу узкого канала (УК). Это достигается путем создания диаграмм
излучения широкого канала с провалом в направлении зоны действия узкого
215
канала. Кроме того, мощность сигнала, излучаемого широким каналом, меньше,
чем мощность сигнала узкого канала.
Кроме того, несущие частоты этих каналов сдвинуты в разные стороны
относительно средней частоты f0 системы посадки на величину ±Δf
(±5 кГц
для КРМ и ±10 кГц для ГРМ).
Широкий и узкий каналы КРМ и ГРМ построены по принципу действия
радиомаяков с опорным нулем. Для этого они излучают суммарные
(амплитудно-модулированные)
и
разностные
(балансно-модулированные)
сигналы через соответствующие антенные системы.
Работа узкого канала КРМ не отличается от работы одноканального КРМ
с опорным нулем и рассмотрена в п. 2.6.1.6.
Узкий канал излучает сигналы в секторе ±12° относительно оси ВПП.
Антенная система узкого канала представляет собой линейный ряд из 18
излучателей (типа «волновой канал»), запитываемых в соответствующем
амплитудно-фазовом распределении суммарным и разностным сигналами.
Большой размер раскрыва антенной системы УК позволяет создавать узкие
диаграммы шириной ±12° относительно направления максимума.
Двенадцать синфазно запитанных суммарным сигналом EΣ узкого канала
излучателя (с 4-го по 15-й) создают в пространстве один лепесток ДНА с
максимумом в направлении оси взлетно-посадочной полосы (ВПП). Две группы
излучателей (с 1-го по 9-й и с 10-го по 18-й) запитываются противофазно
разностным сигналом EΔ узкого канала и формируют два лепестка ДНА с
минимумом вдоль оси ВПП. Таким образом, формируется ДНА узкого канала
КРМ, подобная показанной на рис. 2.57.
Широкий канал КРМ формируется антенной системой в виде линейного
ряда из пяти излучателей. Размер раскрыва антенной системы широкого канала
значительно меньше, чем у узкого канала. Поэтому ширина формируемой ею
диаграммы
достигает
±40°
относительно
направления
максимума
(совпадающего с осью ВПП).
Излучатели 1, 2, 4, 5 широкого канала КРМ питаются синфазно
суммарным сигналом EΣ и создают в пространстве один широкий лепесток ДНА
F1(Θ) с максимумом в направлении оси ВПП (рис. 2.60, а).
216
Одиночный излучатель 3, расположенный на продолжении оси ВПП,
имеет диаграмму F3(Θ). Он запитывается суммарным сигналом EΣ меньшей
амплитуды и в противофазе к остальным излучателям, что приводит к
компенсации излучения суммарного сигнала в направлении оси ВПП, где она
имеет провал до 0,25EΣ . Результирующая диаграмма FΣ(Θ) суммарного сигнала
F1(Θ)
90
150
150
90
f
90
150
f0
F3(Θ)
а
150
90
ШК показана на рис. 2.60, а.
f
f0
1,0
0,8
FΣ(Θ)
F2( )
а)
0,6
F3( )
0,4
F0( )
0,2
°
°
°
°
°
°
°
°
°
°
°
0 4
°
150
90
-40 -36 -32 -28 -24 -20 -16 -12 -8 -4
FΣ(Θ)
б
°
°
°
°
°
°
°
°
°
°
°
°
°
12 16 20 24 28 32 36 40
Θ
f
f0
F150(Θ)
1,2
8
90
150
0
F90(Θ)
1,0
f90 (0,8
)
f15 0( )
0,6
0 .5 f1 ( )
F0(
)
0,4
0,2
°
°
°
°
°
°
°
°
f0
90
150
f
°
°
0 4
°
FΔ(Θ)
8
°
°
°
°
°
12 16 20 24 28 32 36 40
f0
90
150
°
-40 -36 -32 -28 -24 -20 -16 -12 -8 -4
150
90
0
150
90
б)
f
Рис. 2.60. Формирование диаграмм направленности двухканального КРМ:
а – суммарного сигнала широкого канала; б – сигналов модуляции 90 Гц
и 150 Гц широкого канала
Θ
217
Разностный сигнал EΔ широкого канала подается на излучатели 2 и 4
антенной системы ШК в противофазе, в результате чего в пространстве
формируется
двухлепестковая ДНА FΔ(Θ)
с минимумом излучения в
направлении оси ВПП. В пространстве при этом могут быть выделены две ДНА
F90(Θ) и F150(Θ) для каждого из сигналов модуляции раздельно (рис. 2.60, б).
Диаграммы направленности сигналов модуляции 90 Гц и 150 Гц
двухканального КРМ показаны на рис. 2.61.
На рисунке видно, что амплитуда сигналов узкого канала в секторе ±8°
относительно посадочного курса намного превышает сигналы широкого канала.
При этом при амплитудном детектировании в приемнике более слабые сигналы
широкого канала будут подавляться сигналами узкого канала и влияния на
точность измерения отклонения ВС оказывать не будут. Для их надежного
подавления требуется (по нормам ICAO) превышение сигналов УК над
сигналами ШК на 10 дБ (приблизительно в 3,2 раза). Разнос частот каналов
ШК
f
f0 –Δf
f
f0+Δf
2,0
1,8
1,6
f90 (1,4
)
f1501,2
( )
fy901,0
( )
0,8
fy150( )
0,6
0,4
0,2
0
f0+Δf
°
°
°
°
°
°
°
ШК
90
90
f
f0 –Δf
f
F90(Θ)
F150(Θ)
°
90
УК
90
150
150
150
150
между собой на 2Δf делает такое подавление еще более надежным.
°
-40 -36 -32 -28 -24 -20 -16 -12 -8 -4
°
°
°
°
°
°
°
°
° °
°
°
0 4 8 12 16 20 24 28 32 36 40
Рис. 2.61. Диаграммы направленности сигналов модуляции
90 Гц и 150 Гц двухканального КРМ
Θ
218
В секторе ±4° достигается линейное изменение РГМ от величины
отклонения ВС от линии посадочного курса. За пределами этого сектора
обеспечивается только индикация направления отклонения ВС за счет приема
сигналов широкого канала. При этом планка индикатора находится в крайних
положениях его шкалы, так как РГМ значительно превышает величину ±0,18.
При подходе самолета к линии курса он входит в зону действия узкого канала, и
планка индикатора начинает показывать величину его отклонения.
От глиссадного радиомаяка не требуется широкий рабочий сектор по
вертикали, однако к нему предъявляются жесткие требования по точности
задания траектории посадки. Обеспечение таких требований возможно при
отсутствии отражающих объектов, особенно под малыми углами места, что
выполнить практически невозможно, поэтому в двухканальных ГРМ для
уменьшения искривлений задаваемой траектории снижают мощность сигнала
узкого канала, излучаемого под малыми углами места (ниже 1°–1,5°) и
облучающего местные предметы.
И узкий, и широкий (клиренс) каналы в ГРМ имеют одинаковую величину
от 0° до 6° в вертикальной плоскости. Узкий канал предназначен для точного
задания посадочной траектории, а широкий обеспечивает компенсацию
излучения узкого канала под малыми углами места и индикацию направления
отклонения ВС в этой области, где отсутствуют сигналы узкого канала.
Для создания таких диаграмм излучения в двухканальном ГРМ
используется антенная система (рис. 2.62), состоящая из трех излучателей,
высоты подвеса которых кратны между собой и равны h, 2h и 3h.
В широком канале применяются нижняя А1 и верхняя А3 антенны, которые
возбуждаются
суммарным
сигналом
EΣ
(амплитудно-модулированным
частотами 90 Гц и 150 Гц на несущей частоте, сдвинутой на –Δf относительно
несущей частоты f0 радиомаяка). Антенна А1 создает однолепестковую
диаграмму с максимумом в направлении угла βГ =3° наклоны глиссады.
Антенна А3 создает трехлепестковую диаграмму, максимум среднего
лепестка которой направлен под углом βГ и противофазен сигналу антенны А1.
Таким образом, результирующая диаграмма направленности FШК(β) широкого
канала (см. рис. 2.62, а) имеет провал в направлении угла наклона глиссады и на
работу узкого канала не влияет.
90
f0
f
150
150
90
150
FШК(β)
f
90
f0
1,5
f1 ( )
А1
EΣ
f3 ( )
1,0
UW( )
0,5
h
β
0
π
А1
f
90
°
f0
f
150
90
6
150
150 90
150
90
150
f0
°
5
FΣУК(β)
1,0
U ( )
0,5
h
β
0
°
150
f
f0
°
90 150
f0
6
90
90
150
5
f
2,0
f1 ( )
1 .5
f2 ( )
1,5
U ( )
1,0
β
0,5
f
f0
°
3
°
4
°
°
5
f
FΔУК(β)
f
f0
6
f0
°
150
FΣУК(β)
2
90
°
90
1
f
90
150
°
90 150
90
f0
150
90
0
90
0
150
h
FΔУК(β)
f
°
f3 ( )
А1
EΔ
4
FΔУК(β)
90
π
А2
f0
°
2,5
150
EΔ
3
90
f
°
150
2
150
°
90
f0
90
150
1
90
°
3,0
А3
2h
f
°
f2 ( )
0 .5
в
3h
f0
4
f1 ( )
0
1,5 EΔ
3
90
150
f
°
°
1,5
EΣ
2h
2,0
А2
2
150
0,5 EΣ
f0
150
б
°
90
1
90 150
°
90
0
90 150
3h
4,5
4,0
F90(β)
3,5
3,0
U ( )
2,5
U ( )
u 1( )
2,0
u 2( )
1,5
1,0
0,5
β
1
°
2
°
°
3
f0
4
f
°
5
°
6
F150(β)
f0
°
150
°
150
0
150
0
150
г
f
90
2,0
90
f0
150
А3
EΣ
150
90
а
150
219
Рис. 2.62. Формирование диаграмм направленности двухканального ГРМ:
а – широкого канала; б – суммарного сигнала узкого канала; в – разностного сигнала
узкого канала; г – сигналов модуляции 90 Гц и 150 Гц узкого канала
f
220
Под малыми углами места излучение широкого канала позволяет
определить направление (но не величину) отклонения ВС вниз от глиссады. Для
этого глубина модуляции суммарного сигнала частотой 150 Гц в нем делается
больше, чем частотой 90 Гц. При отклонении ВС выше глиссады индикация ШК
будет соответствовать случаю нахождения самолета ниже глиссады (так как
РГМ сигналов частотой 150 Гц больше, чем 90 Гц в обоих лепестках
результирующей диаграммы ШК).
Для формирования диаграммы излучения суммарного сигнала EΣ узкого
канала он подается на антенны А1 и А2 в противофазе. При сложении одно- и
двухлепестковых
диаграмм
этих
антенн
в
пространстве
образуется
результирующая ДНА суммарного сигнала узкого канала FΣУК(β), напряженность
поля которой для углов места менее 1°–1,5° очень мала (рис. 2.62, б). Это
обеспечивает низкий уровень сигналов, отраженных от местных предметов и
рельефа местности и, значит, уменьшает искривления глиссады, задаваемой
узким каналом.
Разностный
сигнал
EΔ
узкого
канала
(балансно-модулированный
частотами 90 Гц и 150 Гц на несущей частоте, сдвинутой на +Δf относительно
несущей частоты f0 радиомаяка) подается на все три антенны, причем на А2 — в
противофазе к остальным. Сложение с учетом фазового и амплитудного
распределения сигналов всех антенн образует результирующую диаграмму
разностного сигнала (рис. 2.62, в) узкого канала FΔУК(β). Она имеет провал до
нуля при βГ =3° и лепестки с максимумами в направлении углов в вертикальной
плоскости около β ≈4,5° и β ≈2,5°.
В пространстве при этом могут быть выделены две диаграммы F90(β) и
F150(β) для каждого из сигналов модуляции раздельно (рис. 2.62, г). Диаграммы
направленности сигналов модуляции 90 Гц и 150 Гц обоих каналов
двухканального ГРМ показаны на рис. 2.63.
ШК
f
f0 –Δf
f
f0+Δf
f0+Δf
ШК
f
90
150
150
90
90
УК
90
150
150
90
150
150
90
221
f0 –Δf
f
4,5
4,0
F90(β)
3,5
3,0
u 1( )
2,5
u 2( )
2,0
UW( )
FШК(β)
1,5
F150(β)
FШК(β)
1,0
0,5
β
0
°
0
1
°
2
°
°
3
4
°
5
°
6
°
Рис. 2.63. Диаграммы направленности сигналов модуляции
90 Гц и 150 Гц двухканального ГРМ
На рисунке видно, что амплитуда сигналов широкого канала для углов
ниже 2° намного превышает сигналы узкого канала, а выше 4° — значительно
меньше их. Поэтому при амплитудном детектировании в приемнике более
слабые сигналы широкого канала будут подавляться сигналами узкого канала
для углов выше βГ и влияния на индикацию отклонения ВС и искривления
глиссады оказывать не будут. Уровень сигналов узкого канала ниже угла β
< 1,5° незначителен, поэтому местные предметы и рельеф местности влияния на
задаваемую им линию глиссады не оказывают.
2.6.1.8. Амплитудный моноимпульсный радиолокатор
Определение углового положения цели в моноимпульсной радиолокации
основано на использовании метода сравнения (равносигнального метода) [16].
При этом сравниваются амплитуды сигналов, принятых двумя антеннами,
диаграммы направленности (ДНА) которых повернуты на угол φ вправо и влево
222
(рис.
2.64)
относительно
равносигнального
направления.
Диаграммы
направленности этих антенн описываются следующими выражениями:
F1 (Θ)=F(Θ – φ);
F2 (Θ)=F(Θ + φ),
где Θ — угол, отсчитываемый от равносигнального направления;
φ — угол поворота максимума ДНА.
Структурная
схема
приемника
амплитудного
моноимпульсного
радиолокатора приведена на рис. 2.64, а вид сигналов в нем — на рис. 2.65.
Сигналы, принятые каждой из антенн, имеют вид
u1(t)=UcF(Θ – φ – γ)Sin2πf0t=U1(γ)Sin2πf0t ;
u2(t)= UcF(Θ + φ + γ)Sin2πf0t=U2(γ)Sin2πf0t ,
(2.153)
где Uc — амплитуда сигнала, пришедшего к антенне;
U(γ) — амплитуда сигнала на выходе антенны;
γ — угол отклонения направления на цель от РСН;
f0 — несущая частота принимаемого сигнала.
Фазы сигналов, принимаемых обеими антеннами, при этом одинаковы, а
их амплитуды зависят от угла γ из-за влияния формы ДНА.
u1(t)
F2(Θ)
A1
φ
γ2
– φ –γ1
F1(Θ)
A2
u2(t)
Суммирующее устр.
+
–
Вычитающее устр.
Смеситель
УПЧ
Гетеродин
Фазовый
детектор
Смеситель
УПЧ
uΣ(t)
uΔ(t)
Рис. 2.64. Структурная схема приемного канала амплитудного
моноимпульсного радиолокатора
Uфд(γ)
223
F1(Θ)
τи
τи
U1(γ2)
U1(γ1)
Θ
t
t
-γ1 0 γ2
F2(Θ)
U2(γ1)
U2(γ2)
Θ
t
t
FΣ(Θ)
UΣ(γ1)
UΣ(γ2)
Θ
t
t
FΔ(Θ)
UΔ(γ2)
UΔ(γ1)
+
–
Θ
t
t
Uфд(Θ)
γ2
-γ1
Θ
Uфд(γ2)
t
РСН
-Uфд(γ1)
t
Рис. 2.65. Вид сигналов суммарного и разностного каналов
амплитудного моноимпульсного радиолокатора
Эти сигналы поступают далее на суммирующее и вычитающее
устройства, на выходах которых образуется суммарный и разностный сигналы
uΣ(t)=u1(t)+ u2(t)=Uc[F(Θ – φ – γ)+ F(Θ + φ + γ)]Sin2πf0t = Uc[FΣ(Θ )]Sin2πf0t=
=[U1(γ)+ U2(γ)] Sin2πf0t= UΣ(γ )Sin2πf0t ;
(2.154)
uΔ(t)=u2(t) – u1(t)=Uc[F(Θ + φ + γ) – F(Θ – φ – γ)]Sin2πf0t = Uc[FΔ(Θ )]Sin2πf0t=
=[U2(γ) – U1(γ)] Sin2πf0t= UΔ(γ )Sin2πf0t .
224
После преобразования и усиления в УПЧ сигналы суммарного и
разностного каналов будут иметь вид
uΣПЧ (t)=kΣUΣ(γ )Sin(2πfПЧt+ψ1)=kΣUc[F(Θ–φ –γ)+F(Θ +φ +γ)]Sin(2πfПЧt+ψ1);
(2.155)
uΔПЧ (t)=kΔUΔ(γ )Sin(2πfПЧt+ψ2)=kΔUc[F(Θ+φ+γ) –F(Θ–φ –γ)]Sin(2πfПЧt+ψ2),
где kΣ , kΔ — коэффициенты передачи суммарного и разностного каналов;
ψ1 , ψ2 — фазовые сдвиги в каналах;
fПЧ — промежуточная частота.
При этом сигналы, принятые через правый и левый лепестки разностной
диаграммы FΔ(Θ), будут противофазны (рис. 2.65), а сигналы в пределах
суммарной диаграммы FΣ(Θ) всегда синфазны независимо от направления
прихода (углов γ1 или γ2).
Если разложить функции, описывающие ДНА обеих антенн в (2.155), в
ряд Тейлора и ограничиться только членами разложения первого порядка, то
получим выражения для сигналов суммарного и разностного каналов:
uΣПЧ (t)=2kΣUс F(Θ) Sin(2πfПЧt+ψ1);
׳
(2.156)
uΔПЧ (t)=2kΔUсF (Θ)γ Sin(2πfПЧt+ψ1).
Эти сигналы поступают на фазовый детектор, где происходит их
перемножение, в результате чего его выходной сигнал будет представлять собой
видеоимпульс (с подавленными высокочастотными составляющими)
׳
uфд = uΣПЧ (t) uΔПЧ (t)=2kΣ kΔ kфд Uc2 F(Θ)F (Θ) γ Cos(ψ2 – ψ1 ) ,
(2.157)
где kфд — коэффициент передачи фазового детектора;
׳
F (Θ) — первая производная ДНА по углу (крутизна диаграммы).
Амплитуда этого видеоимпульса пропорциональна величине отклонения
направления прихода сигнала (углам γ1 или γ2), а знак определяет сторону
отклонения от равносигнального направления (рис.2.65).
Выражение
(2.157)
является
пеленгационной
амплитудного моноимпульсного радиолокатора.
характеристикой
Нулевое пеленгационное
направление совпадает с РСН и не зависит от неидентичности амплитудных (k)
и фазовых (ψ) характеристик каналов. Различие этих характеристик в каналах
приводит только к снижению крутизны пеленгационной характеристики.
225
ПРД
2
+
(1+2)
+
–
–
β
(1+2+3+4)
Антенный
переключ.
Амплитудн
детектор
R
Фазовый
детектор
β
Фазовый
детектор
α
ПРМ
дальномерн
..
(1+2) – (3+4)
ПРМ
угломестн.
α
(1–2)
1 2
3 4
(3+4)
1
4
+
3
(3–4)
–
+
(1+3) – (2+4)
ПРМ
азимутальн
–
(1–2) – (3–4)
Поглощающая нагруз.
Рис. 2.66. Структурная схема моноимпульсного радиолокатора
Представленный на рис. 2.64 радиолокатор позволяет осуществлять
пеленгацию только в одной плоскости. Для определения угловых координат в
двух плоскостях необходимо формировать четыре пересекающиеся ДНА с
общим
равносигнальным
направлением.
Структурная
схема
такого
моноимпульсного радиолокатора показана на рис. 2.66.
В нем в качестве суммирующих и вычитающих устройств применяются
суммарно-разностные волноводно-кольцевые мосты (рис. 2.67). Принцип его
работы основан на сложении высокочастотных колебаний с учетом их фазы,
которая зависит от длины проходимого по мосту пути. Действительно,
синфазные колебания, поступившие на входы 1
и 2, пройдут до выхода «+» равные
2
пути
λ ∕4
длиной λ ∕4 и сложатся в фазе. До выхода «–»
для этих же сигналов длина пройденных путей
λ ∕4
–
+
будет отличаться на λ ∕2, что приведет к их
λ ∕4
сложению в противофазе, то есть компенсации.
Аналогично при подаче сигнала на вход «+» он
появится выходах 1 и 2 в фазе, а на выходе «–»
будет
отсутствовать
противофазности.
вследствие
1
3λ ∕4
Рис. 2.67. Суммарно-разностный
волноводно-кольцевой мост
226
Сигнал
суммарного
канала
используется
после
амплитудного
детектирования для обнаружения целей и измерения их дальности (R). Кроме
того, фаза несущей частоты сигналов суммарного канала используется в
качестве опорной при фазовом детектировании в каналах измерения азимута (α)
и угла места (β).
В угломестной плоскости создается разностный сигнал диаграмм
(1+2)–(3+4),
а в азимутальной плоскости — разностный сигнал
диаграмм
(1+3)–(2+4). Разностный сигнал диаграмм (1–2)–(3–4) не содержит полезной
информации и потому не используется.
2.6.2. Фазовые методы определения направления
В этих методах информация о направлении заключена в разности фаз
сигналов, принимаемых в текущий момент времени двумя разнесенными в
пространстве антеннами (рис. 2.68). Разность фаз (фазовый сдвиг) Δφ может
измеряться непосредственно фазометром или косвенно через другие параметры
сигнала, например, его амплитуду.
Появление фазового сдвига Δφ между сигналами двух антенн А1 и А2
вызвано тем, что сигнал от воздушного судна до них проходит разное
расстояние (рис. 2.68, а). В результате фронт волны достигнет антенны А2
раньше, чем антенны А1. Величина запаздывания определяется разностью хода
Δr , которая в свою очередь зависит от направления прихода волны (угла α).
Отсчет угла α ведется от перпендикуляра к середине базы антенной
системы, который является нулевым направлением.
Разность хода фронта волны до антенн А1 и А2 Δr = dSinα.
Тогда разность фаз между сигналами этих антенн
Δ
2
Δr 2
d
Sin .
(2.158)
Отсюда угол α будет определяться через измеренный фазовый сдвиг
зависимостью
,
2d
arcsin
227
а
б
Δφ , рад.
2π
1,5π
R
Фронт
волны
π
0,5π
Δr
α
А1
0
α
ПРМ1
1-d=λ;
2 - 3λ /4 ;
3λ /2 ;
4 - 3λ /8 ;
5λ /4 ;
6λ /6 ;
7λ /8
2
3
4
5
6
7
ПРМ2
Δφ
α,
град.
-0,5π
А2
d
1
-π
-1,5 π
-2π
0 30 60 90 120 150 180 210 240 270 300 330 360
Рис. 2.68. Фазовый метод измерения углов: а – образование разности фаз принимаемых
сигналов; б – зависимость разности фаз Δφ от угла α прихода волны
для разного размера базы d
где Δφ — разность фаз (фазовый сдвиг) сигналов антенн;
d — расстояние между антеннами (база антенной системы);
λ — длина волны.
График зависимости разности фаз от угла α показан на рис. 2.68, б.
Однозначный отсчет пеленга возможен, если фазовый сдвиг Δφ не
◦
превосходит величины Δφ=2π для угла α = 90 . Отсюда максимальный размер
базы не должен быть больше длины волны d ≤ λ. Экспериментально
установлено, что наименьшие погрешности, возникающие из-за разноса антенн,
получаются при d ≤ 3λ /8.
Нулевой фазовый сдвиг Δφ=0 достигается на перпендикуляре к середине
◦
◦
базы антенной системы и соответствует значениям углов α=0 и α=180 . На
рисунке также видно, что одинаковому фазовому сдвигу Δφ соответствуют два
значения угла α прихода волны, лежащие в одной полуплоскости относительно
228
нулевого направления, но находящиеся зеркально в разных квадрантах
относительно продолжения базы антенной системы.
Таким образом, в силу периодичности фазы этому методу присуща
неоднозначность измерений, что является его недостатком.
2.6.2.1. Наземный радиопеленгатор с измерением на высокой частоте
Для устранения неоднозначности определения направления
[2] в
автоматических радиопеленгаторах (АРП) используется антенная система,
состоящая из центральной антенны (на рисунке не показана) и двух взаимно
перпендикулярных Н-образных антенн, каждая из которых состоит из четырех
вертикальных вибраторов, ориентированных по сторонам света (рис. 2.69).
При этом вибраторы каждой пары соединены таким образом, что с обеих Нобразных антенн снимаются разностные сигналы
eСЮ(t)= eС(t) – eЮ(t);
eЗВ(t)= eЗ(t) – eВ(t).
С
а
d
З
В
d
б
(2.159)
Ю
+
АС
–
eВ(t)
+
АЗ
АЦ
eЮ(t)
–
eСЮ(t)
FЗВ(α)
+
eС(t)
eЗ(t)
α
FСЮ(α)
АЮ
FЦ =1
eЗВ(t)
Рис. 2.69. Антенная система амплитудного АРП:
а — конструкция Н-образной антенны;
б – диаграммы направленности
АВ
229
В зависимости от направления прихода фронта волны фаза сигнала будет
разной для различных антенн. Это обусловлено наличием разности хода ΔrСЮ и
ΔrЗВ от источника сигнала до каждого из вибраторов (рис. 2.70).
На рисунке видно, что разности хода ΔrСЮ и ΔrЗВ фронта волны между
вибраторами каждой пары антенн равны соответственно
ΔrСЮ = dCosα ;
(2.160)
ΔrЗВ = dSinα ,
где α — азимут самолета.
Разность хода волны между каждым из вибраторов и центральной
антенной будет в два раза меньше, чем определяемая выражением (2.160), то
есть
ΔrСЦ = ΔrЮЦ =0,5ΔrСЮ ;
ΔrЗЦ = ΔrВЦ =0,5ΔrЗВ .
За начало отсчета примем фазу сигнала центральной антенны АЦ. Тогда
фаза антенны АС будет опережать ее на величину ΔφСЦ , а антенны АЮ —
отставать от нее на такую же величину. Аналогично фаза антенны АВ будет
опережать, а антенны АЗ — отставать от фазы антенны АЦ на величину ΔφЗЦ .
Тогда фазовые сдвиги в соответствии с (2.158) с учетом (2.160) будут
Δ СЦ Δ ЮЦ
АС
α
АЦ
АЗ
fПЧ
eСЮ(t) ПРМСЮ
uСЮ(t)
ПРМЗВ
uЗВ(t)
(2.161)
ν
α
ΔrСЮ
АЮ
f0
АВ
eЗВ(t)
eЦ(t)
ΔrЗВ
d
Cos ;
uЦ(t)
ПРМЦ
гетеродин
fГ
׳
Фазовращат. π⁄2
u Ц(t)
На
модулятор ЭЛТ
Амплит.
детектор
Рис. 2.70. Радиопеленгатор с индикатором на электронно-лучевой трубке,
осуществляющий измерение на высокой частоте
230
Δ ЗЦ Δ ВЦ
d
Sin .
Сигналы, возбуждаемые в каждом из вибраторов антенной системы,
показаны на рис. 2.71, а. Они описываются следующими выражениями:
d
eС (t ) Em Sin 2f0 t
Cos
d
eЮ (t ) Em Sin 2f0 t
Cos
eЦ (t ) Em Sin2f0t
(2.162)
d
eЗ (t ) Em Sin 2f0 t
Sin
d
eВ (t ) Em Sin 2f0 t
Sin
,
где Em — максимальная амплитуда принимаемого сигнала;
d — расстояние между вибраторами Н-образной антенны (база антенны);
α — угол прихода волны, отсчитываемый от северного направления;
λ — длина волны;
f0 — несущая частота сигнала.
С каждой из Н-образных антенн в соответствии с (2.159) и (2.162) на
входы приемников будут поступать сигналы (рис. 2.71, б):
d
eСЮ (t ) eС (t ) eЮ (t ) 2 Em Sin Cos Cos2f0 t
.
(2.163)
d
eЗВ (t ) eЗ (t ) eВ (t ) 2 Em Sin
Sin Cos2f0 t
ΔφВЦ
ΔφСЦ
ΔφСЦ
ΔφСЦ
eЗ(t)
eВ(t)
eЮ(t)
eС(t)
eЦ(t)
а
t
ΔφЮЦ
ΔφЗЦ
UСЮ(α)
б
eСЮ(t)
eЗВ(t)
t
UЗВ(α)
Рис. 2.71. Виды сигналов в радиопеленгаторе: а – на каждом
из вибраторов; б – на выходе Н-образных антенн
231
Выходные сигналы приемников после преобразования по частоте (fПЧ < f0)
и усиления будут иметь вид
d
uСЮ (t ) 2 K СЮ Em Sin Cos Cos2f ПЧ t U СЮ ( )Cos2f ПЧ t
,
(2.164)
d
u ЗВ (t ) 2 K ЗВ Em Sin
Sin Cos2f ПЧ t U ЗВ ( )Cos2f ПЧ t
где KСЮ , KЗВ — коэффициенты усиления приемников каналов;
UСЮ(α) , UЗВ(α) — амплитуды выходных сигналов каналов;
fПЧ — промежуточная частота сигнала в приемнике.
Амплитуды выходных сигналов каналов С-Ю и З-В с учетом того, что d <
λ, могут быть описаны следующими выражениями:
d
U СЮ ( ) 2 K СЮ Em
Cos U СЮ Cos U СЮ FСЮ ( )
.
(2.165)
d
U ЗВ ( ) 2 K ЗВ Em
Sin U ЗВ Sin U ЗВ FЗВ ( )
Из этих выражений следует, что амплитуды выходных сигналов этих
каналов являются функцией угла α прихода фронта волны. Это равносильно
тому, что Н-образные антенны каналов обладают направленными свойствами
(хотя сами вибраторы, из которых они состоят, являются всенаправленными).
Диаграммы направленности Н-образных антенн показаны на рис. 2.69, б.
Они описываются функциями FСЮ(α) = Cosα и FЗВ(α) = Sinα .
При этом информация об угле α прихода фронта волны, содержащаяся в
фазовых различиях сигналов вибраторных антенн, преобразуется за счет их
направленных свойств в амплитудные изменения выходных сигналов каналов
(поэтому такой радиопеленгатор называется амплитудным).
Для отображения информации в амплитудных АРП используются
индикаторы на электронно-лучевых трубках (ЭЛТ).
Выходные высокочастотные сигналы (на промежуточной частоте) каналов
uСЮ(t) и uЗВ(t) в таких индикаторах поступают на две взаимно перпендикулярные
отклоняющие системы. В результате на экране ЭЛТ отображается линия в виде
фигуры Лиссажу, которая для синфазных гармонических колебаний одинаковой
частоты представляет собой прямую линию (рис. 2.72, а), подсвечивающую
диаметр экрана. Угол наклона этой линии на экране
d
Sin
u ЗВ (t ) U ЗВ ( )Cos2f ПЧ t
K
tg
ЗВ tg .
uСЮ (t ) U СЮ ( )Cos2f ПЧ t
d
K СЮ
2 K СЮ Em
Cos
2 K ЗВ Em
(2.166)
232
В случае равенства амплитудных характеристик приемных каналов при
KСЮ = KЗВ выполняется равенство tgν = tgα, и угол наклона индицируемой линии
ν = α. Если коэффициенты усиления каналов не равны, то появляется ошибка Δα
индикации направления (рис. 2.72, б)
K
Δ arctg ЗВ tg
K СЮ
.
(2.167)
При различиях фазовых характеристик каналов (Δψ ≠ 0) нарушается
синфазность высокочастотных колебаний одинаковой частоты, поступающих на
отклоняющие системы, и отображаемая фигура Лиссажу будет иметь вид
эллипса (рис. 2.72, в), большая полуось которого показывает правильное
направление. Если фазовые различия каналов достигнут величины Δψ = π ⁄ 2,
эллипс преобразуется в окружность, и определить направление станет
невозможно.
Отображаемая линия индикации подсвечивает весь диаметр экрана ЭЛТ, в
то время как правильному пеленгу соответствует один из радиусов этой линии.
Это приводит к двузначности измерения. Для ее исключения используется
сигнал центральной ненаправленной антенны, фаза которого не зависит от
направления
u Ц (t ) K Ц Em Sin2f ПЧ t ,
(2.168)
но сдвинута относительно сигналов других каналов на величину π ⁄ 2 .
KЗВ /KСЮ =1
Δψ= 0
а
KЗВ /KСЮ =1,2
Δψ= 0
б
ν= α
α
в
ν
°
KЗВ /KСЮ =1
Δψ= π/18 (10°)
Δα
a1(e1
t )( t )
a1( t )
a1( t )
a2( t )
a2( t )
a2(u1
t) ( t)
e2( t ) u2( t )
t
t
t
Рис. 2.72. Индикация пеленга на экране ЭЛТ (фигуры Лиссажу) при:
а – равенстве амплитудных и фазовых характеристик приемных каналов;
б – неравенстве амплитудных характеристик; в – неравенстве фазовых характеристик
233
После компенсации этого сдвига фазовращателем на π ⁄ 2 (включенным на
выходе приемника центральной антенны) сигнал ее будет иметь вид
׳
u Ц (t) K Ц Em Sin(2f ПЧ t / 2) K Ц EmCos2f ПЧ t .
Колебания сигнала центральной антенны после компенсации фазового
сдвига используются для подсветки отображаемой линии направления. Для
этого они подаются на модулятор ЭЛТ и открывают его во время
׳
положительной полуволны колебания u Ц (t) (рис. 2.73) и запирают во время
отрицательной.
◦
Так как сигналы uСЮ (t) и uЗВ (t) для пеленгов, отличающихся на 180 ,
имеют разные знаки, то подсвечиваться для них в периоды, когда открыт
модулятор, будут противоположные радиусы отображаемой линии направления.
Таким образом, устраняется неоднозначность отсчета пеленга.
2.6.2.2. Наземный радиопеленгатор с амплитудной индикацией
Рассмотренный радиопеленгатор обладает низкой точностью измерения
пеленга, что обусловлено трудностью обеспечения идентичности его приемных
каналов. Для повышения точности измерения необходимо исключить влияния
характеристик приемников на сигналы разных каналов. Это достигается тем, что
сигналы каналов С-Ю и З-В проходят через один общий приемник. Однако при
этом необходимо осуществлять разделение сигналов каждого из каналов после
прохождения приемника. Это достигается введением балансной модуляции
З-В
перед
прохождением
приемника.
После
общего
прохождения
приемника сигналы разных каналов
легко
разделяются
модуляции
по
uСЮ(t)
uЗВ(t)
t
частотам
uЗВ(t)
соответствующими
uСЮ(t)
׳
u Ц (t)
фильтрами. Структурная схема такого
пеленгатора [3] представлена на рис.
2.74.
Модулятор
заперт
α
вспомогательными частотами F1 и F2
◦
и
α+180
С-Ю
Модулятор
открыт
каналов
Модулятор
открыт
сигналов
t
Рис. 2.73. Устранение неоднозначности
отсчета пеленга
234
Антенная система радиопеленгатора состоит из двух Н-образных и
центральной ненаправленной антенн (см. рис. 2.69).
Выходные сигналы Н-образных и центральной антенн описываются
выражениями (2.162). При этом максимальная амплитуда, снимаемая с
центральной
антенны,
больше,
чем соответствующие амплитуды антенн
Н-образных, то есть EmЦ > Em.
Они подвергаются балансной модуляции вспомогательными сигналами с
частотами F1 и F2, вырабатываемыми генераторами опорного напряжения
(ГОН). В результате балансной модуляции в их спектре подавляется
составляющая несущей частоты f0 , и сигналы имеют вид
uСЮ (t)=UСЮ(α)Cos2πF1t Cos2πf0t = UСЮCosαCos2πF1t Cos2πf0t ;
(2.169)
uЗВ (t)=UЗВ (α)Cos2πF2t Cos2πf0t = UЗВ SinαCos2πF2t Cos2πf0t ,
где F1 , F2 — вспомогательные частоты модуляции;
f0 — несущая частота сигнала;
UСЮ , UЗВ — максимальные амплитуды сигналов каналов С-Ю и З-В.
Амплитуды каналов UСЮ(α) и UЗВ(α) зависят от угла α направления
прихода фронта волны в соответствии с (2.164), где коэффициенты передачи
балансных модуляторов практически одинаковы: KСЮ = KЗВ = KБМ .
БДСЮ
АС
АЗ
α
ΔrСЮ
АЮ
АВ
Устр-во
сложения
ия
eЗВ(t)
БМЗВ
u0(t)
АЦ
uСЮ(t)
eЦ(t)
ΔrЗВ
ГОН F1
eСЮ(t) БМСЮ
α
U1(α)
ν
Фильтр
F1
ПРМ
uпрмр (t)
Фильтр
F2
uЗВ(t)
ГОН F2
БДЗВ
U2(α)
Рис. 2.74. Структурная схема радиопеленгатора с амплитудной индикацией
235
После
сложения
балансно-модулированных
сигналов
с
сигналом
центральной антенны в устройстве сложения произойдет восстановление
спектральной составляющей несущей частоты. Поэтому суммарный сигнал на
входе приемника будет амплитудно-модулированным двумя частотами F1 и F2:
u0(t)= uСЮ (t)+ uЗВ (t)+eЦ(t)=
U
U
EmЦ 1 СЮ CosCos2F1t ЗВ SinCos2F2t Cos2f0 t ,
EmЦ
EmЦ
EmЦ [1 mСЮ()Cos2F1t mЗВ()Cos2F2t ]Cos2f0t
(2.170)
.
При этом коэффициенты модуляции сигналов разных антенных каналов
(с частотами F1 и F2) оказываются зависящими от угла α:
U СЮ
Cos
EmЦ
U
mЗВ() ЗВ Sin
EmЦ
mСЮ ()
.
(2.171)
Выходной сигнал приемника после преобразования по частоте, усиления и
амплитудного детектирования будет представлять собой огибающую колебания,
модулированного по амплитуде одновременно двумя частотами F1 и F2:
uпрм (t)= KусUСЮ Cosα Cos2πF1t + KусUЗВ Sinα Cos2πF2t ,
(2.172)
где Kус — коэффициент усиления приемника.
Выходной сигнал приемника (2.172) разделяется фильтрами по частотам
модуляции и подвергается балансному детектированию. На выходе балансного
детектора (являющегося разновидностью фазового детектора) образуются
постоянные напряжения
U1 (α)= KБД1 Kус UСЮ Cosα ;
(2.173)
U2 (α)= KБД2 Kус UЗВ Sinα ,
где KБД1 , KБД2 — коэффициенты передачи балансных детекторов.
Индикация пеленга может осуществляться с помощью стрелочного
прибора. Он содержит две взаимно перпендикулярные рамочные катушки, по
которым протекают токи, пропорциональные напряжениям U1 (α) и U2 (α) от
балансных детекторов. Внутри катушек создается суммарное магнитное поле,
направление вектора напряженности которого определяется соотношением
236
величин и знаков напряжений U1 (α) и U2 (α). Это поле воздействует на
постоянный магнит с укрепленной на нем стрелкой и поворачивает его в
направлении вектора напряженности суммарного магнитного поля. Таким
образом, угол поворота стрелки
d
2
K
K
K
E
Sin
ЗВ
ус
БД
2
m
K ЗВ K БД 2
U 2 ( )
(2.174)
tg
tg .
U 1 ( )
d
K СЮ K БД 1
2 K СЮ K ус K БД 1 Em
Cos
В рассмотренном радиопеленгаторе удается обеспечивать хорошую
идентичность коэффициентов передачи балансных модуляторов KСЮ = KЗВ = KБМ
и балансных детекторов KБД1 = KБД2 = KБД , поэтому точность измерения пеленга
в нем выше, чем в радиопеленгаторе с измерением на высокой частоте, где
обеспечить идентичность характеристик двух приемных каналов значительно
труднее.
2.6.2.3. Автоматический радиокомпас фазового типа
В радиокомпасе для определения направления используются фазовые
различия несущей частоты сигнала, принимаемого противоположными
лепестками ДНА рамочной антенны. Для устранения неоднозначности
измерения применяются две взаимно перпендикулярные неподвижные
рамочные антенны, одна из которых направлена вдоль продольной оси
самолета, а другая поперек (рис. 2.75, а), а также ненаправленная антенна.
Диаграммы направленности рамочных антенн имеют вид восьмерок (рис.
2.75, б) и описываются выражениями вида
Fр1(α)= Sinα ;
(2.175)
Fр2(α)= Cosα ,
где Fр(α) — нормированная диаграмма направленности рамочной антенны;
α – угол, отсчитываемый от продольной оси самолета.
Структурная
схема
представлена на рис. 2.76.
автоматического
радиокомпаса
фазового
типа
237
а
РА2
б
°
90
РА1
α1
FР2(α)
FР1(α)
+
–
α2
+
–
eР2(t)
eР1(t)
Рис. 2.75. Антенная система АРК фазового типа:
а – конструкция рамочных антенн; б – диаграммы
направленности
б)
eр1(t)
Балансный
модулятор
Ненаправленная
eн(t)
д)
u1(t)
Фазовращатель π/2
Рамочная
антенна 2
Сумматор
1
модулятор
антенна
а)
Сумматор
2
ж)
eΣр (t)
з)
Приемник
Амплитудн.
детектор
ИКУ
Фазовый
детектор
eвх(t)
Рамочная
антенна 1
г)
в)
eр2(t)
Балансный
модулятор
eГ(t)
е)
u2(t)
Генератор
опорного
напряжения
Рис. 2.76. Структурная схема автоматического радиокомпаса фазового типа
Вид сигналов в характерных точках АРК для двух значений курсового
угла радиостанции (КУР) показан на рис. 2.77. Для большей наглядности будем
считать, что приводная радиостанция излучает немодулированный сигнал, а все
коэффициенты передачи и усиления в АРК равны единице.
Вид сигнала ненаправленной антенны (рис. 2.77, а)
238
eн(t)= Eн Sin2π f0t,
(2.176)
где Eн — максимальная амплитуда сигнала, принимаемая ненаправленной
антенной;
f0 — несущая частота принимаемого сигнала.
Его параметры не зависят от направления прихода сигнала, поэтому
примем начальную фазу этого сигнала ψн = 0 .
Выходной сигнал (для двух значений курсового угла радиостанции α1=30
°
°
и α2=120 ) первой рамочной антенны показаны на рис. 2.77, б , а второй — на
рис. 2.77, в. Следует помнить, что по несущей частоте сигналы рамочной
антенны сдвинуты относительно фазы электромагнитного поля на π/2.
Компенсация этого сдвига осуществляется в блоке рамочных антенн введением
фазовращателя. Поэтому выходные сигналы рамочных антенн с учетом (2.175)
будут описываться следующими выражениями:
eр1(t)= Eр1Fр1(α)Sin2π f0t =Eр1 Sinα Sin2π f0t= Eр1(α) Sin2π f0t ;
eр2(t)= Eр2Fр2(α)Sin2π f0t =Eр2 Cosα Sin2π f0t= Eр2(α) Sin2π f0t ,
(2.177)
где Eр — максимальная амплитуда сигнала, принимаемая рамочной антенной;
Fр(α) — нормированная диаграмма направленности рамочной антенны.
Эти сигналы подвергаются балансной модуляции низкочастотным
напряжением (рис. 2.77, г) с частотой FГ, вырабатываемым генератором
опорного напряжения. Модулирующие колебания, поступающие на балансные
модуляторы, сдвинуты по фазе за счет фазовращателя на π/2. Поэтому сигналы
на выходах первого (рис. 2.77, д) и второго (рис. 2.77, е) балансных модуляторов
будут иметь следующий вид:
u1(t)= Eр1 Sinα Sin(2πFГ t+π/2) Sin2π f0t= Eр1(α) Cos2πFГ t Sin2π f0t,
(2.178)
u2(t)= Eр2 Cosα Sin2πFГ t Sin2π f0t= Eр2(α) Sin2πFГ t Sin2π f0t .
Далее балансно-модулированные сигналы складываются в сумматоре 1 и
при идентичности амплитудных характеристик обоих рамочных каналов (при
Eр1 = Eр2 = Eр max < Eн ) суммарный сигнал (рис. 2.77, )
еΣр(t)= u1(t)+ u2(t)= Eр max[Sinα Cos2πFГ t + Cosα Sin2πFГ t] Sin2π f0t =
= Eр max Sin(2πFГ t+ α )Sin2π f0t .
(2.179)
239
а
Eн
eн(t)
en( t )
Eр1(α1)
t
б
t
ep 1 1( t )
eр1(t)
t
ep 1 2( t )
Eр1(α2)
Eр2(α1)
t
в
ep 2 1( t )
t
eр2(t)
ep 2 2( t )
Eр2(α2)
t
г
Sin2πFГ t
EГ
eГ(t)
t
em( t )
Eр1(α1)
t
д
u 11( t )
u1(t)
t
Eр1(α2) t
Eр2(α1t)
u 12( t )
t
е
u 21( t )
u2(t)
t
u 22( t )
Eр2(α2)
α1
ж
t
α2
Eр max
eΣр(t)
u bm1( t )
t
u bm2( t )
Sin(2πFГ t+α1)
з
t
Sin(2πFГ t+α2)
Eр max
eвх(t)
u01( t )
Eн
um0( t )
t
u02( t )
um1( t )
t
Рис. 2.77. Вид сигналов в характерных точках АРК для двух значений КУР, сигналы:
а – ненаправленной антенны; б – первой рамочной антенны; в – второй рамочной
антенны; г – генератора опорного напряжения; д – на выходе первого балансного
модулятора; е – на выходе второго балансного модулятора; ж – выходной второго
сумматора; з –на входе приемника
240
Выходной сигнал первого сумматора (2.179) также является балансномодулированным, но начальная фаза его огибающей зависит от направления
прихода сигнала α .
При сложении сигнала от ненаправленной антенны (2.176) и суммарного
балансно-модулированного
сигнала
(2.179)
в
сумматоре
2
произойдет
восстановление спектральной составляющей несущей частоты f0. Таким
образом, сигнал на входе приемника (рис. 2.77, з) будет амплитудномодулированным:
E р max
eвх(t) eн(t) eΣр(t) Eн 1
Sin2FГ t Sin2f0 t .
Eн
(2.180)
Информация о курсовом угле радиостанции α в этом сигнале заключена в
начальной
фазе
огибающей
сигнала
амплитудной
модуляции.
После
амплитудного детектирования огибающая выходного сигнала приемника
поступает на фазовый детектор, где сравнивается по фазе с опорным сигналом
(рис. 2.77, г) генератора опорного напряжения. Разность фаз между этими
сигналами равна курсовому углу радиостанции α и отображается на индикаторе.
В этом АРК рамочные антенны неподвижны, и поэтому отсутствуют
механические элементы и следящая обратная связь. Поэтому точность
измерения КУР в нем выше из-за отсутствия инерционности механической
следящей системы.
2.6.2.4. Фазовый моноимпульсный радиолокатор
В фазовом моноимпульсном радиолокаторе информация об угловом
положении
цели
содержится
в
разности
фаз
сигналов,
принимаемых
разнесенными антеннами. Обработка принятых сигналов в нем во многом
аналогична той, которая происходит в амплитудном моноимпульсном [16]
радиолокаторе.
Структурная
схема
приемного
канала
фазового
моноимпульсного
радиолокатора приведена на рис. 2.78, а вид сигналов в нем показан на рис. 2.79.
241
Δr = dSinα1
α2
A1
F1(α)
u1(t)
ΔΘ
uΣ(t)
Смеситель
Суммирующее устр.
׳
u Σ(t)
-α1
Гетеродин
d
α2
УПЧ
u2(t)
-α1
Uфд(α)
Фильтр
׳
u Δ(t)
A2
F2(α)
Фазовый
детектор
Смеситель
Вычитающее устр.
Фазовр.
Фазовр.
ξξ =
=π ⁄ 2
УПЧ
uΔ(t)
Фронт волны
Δr = dSinα2
Рис. 2.78. Структурная схема приемного канала
фазового моноимпульсного радиолокатора
Диаграммы направленности обеих антенн одинаковы, и их максимумы
параллельны. Поэтому амплитуды принятых ими сигналов тоже одинаковы и
определяются только углом α отклонения прихода волны от максимума ДНА, то
есть UcF1(α)= UcF2(α) = UcF(α) = U1(α)= U2(α) = U(α).
Сигналы, принятые каждой из антенн имеют следующий вид (рис. 2.79.):
u1(t)=UcF1(α)Cos2πf0t=U(α)Cos2πf0t ;
u2(t)= UcF2(α)Cos(2πf0t – Δφ)=U(α)Cos(2πf0t – Δφ) ,
(2.181)
где Uc, U(α) — амплитуды сигнала, пришедшего к антенне, и на выходе антенны;
α — угол отклонения направления на цель от оси ДНА;
f0 — несущая частота принимаемого сигнала;
Δφ – фазовый сдвиг между сигналами антенн.
Фазы сигналов, принимаемых обеими антеннами, при этом будут
различны. Фаза сигнала антенны А1 опережает фазу сигнала антенны А2 для угла
α2 или отстает для угла α1 (рис. 2.78) на величину Δφ из-за разности хода Δr
фронта волны от цели до каждой из них.
Величина фазового сдвига определяется в соответствии с (2.158):
Δ() 2
d
Sin ,
где d — расстояние между антеннами (база антенной системы);
λ — длина волны.
242
F(α)
Δφ(α1)
u2(t) u1(t)
U(α1)
u1(t)
Δφ(α2)
u2(t)
U(α2)
α
t
t
-α1 0 α2
ΔΘ
uΣ(t)
uΣ(t)
t
t
uΔ(t)
τи
uΔ(t)
uфд(α)
-uфд(α1)
t
α
t
uфд(α2)
Рис. 2.79. Вид сигналов суммарного и разностного каналов
фазового моноимпульсного радиолокатора
Эти сигналы далее поступают на суммирующее и вычитающее устройства,
на выходах которых образуются суммарный и разностный сигналы (рис. 2.79):
uΣ(t)=u1(t)+ u2(t)= U(α)[Cos2πf0t + Cos (2πf0t – Δφ)] ;
uΔ(t)=u2(t) – u1(t)= U(α)[Cos2πf0t – Cos(2πf0t – Δφ)] .
(2.182)
После преобразования и усиления в УПЧ сигналы суммарного и
разностного каналов будут иметь вид
׳
u Σ(t)= k1U(α)[Cos(2πfПЧt+ ψ1)+ Cos (2πfПЧt – Δφ+ ψ1)] ;
׳
u Δ(t)= k2U(α)[Cos(2πfПЧt+ ψ2+ξ) – Cos (2πfПЧt – Δφ+ ψ2+ξ))] ,
(2.183)
где k1, k2 — коэффициенты передачи суммарного и разностного каналов
(включая усиление в приемнике);
ψ1 , ψ2 — фазовые сдвиги в каналах;
243
ξ — дополнительный фазовый сдвиг, вносимый фазовращателем;
fПЧ — промежуточная частота.
Эти сигналы поступают на фазовый детектор (ФД), где происходит их
перемножение. Перемножение сигналов (2.183) с учетом тригонометрических
преобразований дает результат, содержащий шесть слагаемых, четыре из
которых являются гармоническими функциями высокой частоты 2fПЧ и поэтому
через фильтр не проходят и не появляются на выходе ФД. Два оставшихся
слагаемых являются низкочастотными функциями фазовых параметров, и
выходной сигнал фазового детектора после фильтра будет иметь вид
׳
׳
uфд(α) = u Σ(t)u Δ(t)=0,5k1 k2 kфд U 2(α )[Cos(ψ2 – ψ1 –ξ– Δφ) – Cos(ψ2 – ψ1 –ξ+ Δφ)] ,
где kфд — коэффициент передачи фазового детектора.
Окончательный вид выражения, описывающего выходной видеоимпульс
фазового детектора с учетом (2.157) и того, что ξ = π ∕ 2, будет
2d
2
uфд() k1k2 kфдU ()Cos(Ψ 2 Ψ 1 )Sin
Sin .
(2.184)
Нулевое пеленгационное направление соответствует равенству нулю
выходного сигнала фазового детектора (для α=0) при положении цели на
направлении перпендикуляра к середине базы антенн. Однако из полученного
выражения (2.184) следует, что uфд(α)= 0 и для других направлений, которые
тоже являются пеленгационными направлениями и соответствуют углам
;
2d
j arcsin j
j = 0, 1, 2, . . .
.
(2.185)
Наличие этих углов делает процесс измерения многозначным. Для
устранения многозначности используются антенны A1 и A2 с узкими
диаграммами направленности. Ширина ДНА ΔΘ выбирается такой, чтобы она
была меньше углового расстояния между соседними пеленгационными
направлениями ΔΘ < α1 – α0 , определяемыми в соответствии с (2.185).
Положение
нулевого
пеленгационного
направления
для
фазового
моноимпульсного радиолокатора не зависит от различия амплитудных (k) и
фазовых (ψ) характеристик каналов. Различие этих характеристик в каналах
приводит только к снижению крутизны пеленгационной характеристики.
244
2.6.2.5. Амплитудно-фазовый всенаправленный ОВЧ-радиомаяк
Всенаправленный (ВРМ) амплитудно-фазовый радиомаяк создает в
пространстве радионавигационное поле, в котором информация об угловом
положении ВС заключена в фазе огибающей принимаемого на борту сигнала
[3]. Такой радиомаяк называется стандартным ОВЧ-радиомаяком VOR.
Для формирования такого поля ВРМ излучает сигналы через две антенны.
Одна из них является ненаправленной в горизонтальной плоскости
с
диаграммой F1(Θ)=1.
Другая антенна имеет диаграмму в виде F1(Θ)=CosΘ, которая вращается в
горизонтальной плоскости с постоянной угловой скоростью Ω=2πFВ, делая 30
оборотов
в
секунду.
При
ненаправленной антенной,
этом
напряженность
поля,
излучаемого
превышает напряженность поля направленной
антенны. Диаграмма излучения антенн ВРМ показана на рис. 2.80.
Радиомаяк VOR излучает через эти антенны непрерывное колебание
заданной частоты в диапазоне f0 = 108 – 117,950 МГц.
Через ненаправленную антенну излучается опорный сигнал, фаза которого
для всех направлений одинакова и
привязана по времени к моменту
C
II
прохождения вращающейся антенны
I
маяка через северное направление.
Θ(t)=Ω t
Фаза рабочего сигнала зависит
+
Ω
α1
+
от положения ВС относительно ВРМ
создания
(для
этого
сигнала
используются обе антенны маяка).
Рассмотрим
–
формирования
Будем
рабочего
считать,
ненаправленную
Рис. 2.80. Диаграмма излучения антенн
всенаправленного радиомаяка
процесс
излучается
немодулированное
сигнала.
что
через
антенну
А1
непрерывное
колебание,
245
которое создает в точке нахождения самолета поле (рис. 2.81, а),
e1(t)= F1(Θ)Em1 Cos2πf0t= Em1 Cos2πf0t,
(2.186)
где Em1 — напряженность сигнала первой (ненаправленной) антенны;
f0 — несущая частота сигнала.
Поле от направленной антенны А2 (рис. 2.81, б, г), принимаемое на
самолете в зависимости от угла,
e2(t)= F2(Θ)Em2 Cos2πf0t= Em2Cos[Θ(t) – α] Cos2πf0t ,
(2.187)
где Em2 — напряженность сигнала второй (направленной) антенны;
Θ(t) — текущее значение угла поворота направленной антенны;
α — угол азимута самолета.
Суммарное поле обеих антенн (рис. 2.81, в, д) в точке нахождения
самолета определяется выражением
eР(t) e1(t) e2(t) Em1 1
Em 2
Cos( 2FВ t ) Cos2f0 t U()Cos2f0 t ,
Em1
(2.188)
которое описывает сигнал, модулированный по амплитуде гармоническим
колебанием (задаваемым формой ДНА вращающейся направленной антенны) с
частотой FВ =30 Гц и глубиной модуляции m = Em2 Em1. При этом начальная фаза
огибающей модулирующего колебания (рис. 2.81, е) равна углу азимута
самолета. Выражение (2.188) описывает рабочий сигнал радиомаяка.
Появление амплитудной модуляции в суммарном рабочем сигнале
обусловлено сложением сигналов обеих антенн с учетом их фазы. Так, сигнал
одного из лепестков направленной антенны А2, совпадающий по фазе с
колебаниями всенаправленной антенны А1, суммируется с ними. Для другого
лепестка, несущая частота которого противофазна колебаниям всенаправленной
антенны, происходит их взаимное вычитание.
Максимальное значение принятого сигнала соответствует моменту
прохождения через самолет максимума положительного лепестка ДНА
направленной антенны А2. В этот момент осуществляется отсчет фазы
огибающей рабочего сигнала. За момент начала отсчета фазы принимается
момент прохождения максимума вращающейся антенны маяка через северное
направление на земле.
246
а
e1(t)
t
e( t )
◦
I α1 = 60
б
Em1
t
e2(t)
t
e2 2( t )
t
в
Em1
2( t )
eР1ep(t)
t
◦
II α2 = 0
г
Em2
t
e2(t)
t
e2 1( t )
t
Em2
д
е
t
1( t )
eР2ep(t)
uР1(t)
t
uР2(t)
uР (t)
t
φР=α1
ж
EmП
uП(t)
t
s( t )
t
з
e01(t)
e0( t )
t
ss ( t ) 4
t
и
◦
α1 = 60
e 2 ( t )
eΣ1(t)
s0 2( t ) 8
t
1 .9 s0 0 2( t ) 8
t
◦
α2 = 0
e 1 ( t )
к
eΣ2(t)
s0 1( t ) 8
t
1 .9 s0( t ) 8
1
TВ = F
В
t
Рис. 2.81. Формирование полного сигнала ОВЧ-радиомаяка VOR:
а - немодулированный сигнал ненаправленной антенны;
б - сигнал направленной антенны для α1 = 60◦; в - рабочий сигнал;
г - сигнал направленной антенны для α2 = 0◦; д - рабочий сигнал;
е - огибающая рабочего сигнала; ж - частотно модулированная поднесущая;
з - модулированный сигнал ненаправленной антенны;
◦
и - полный сигнал VOR для α1 = 60◦; к - полный сигнал VOR для α2 = 0
247
Значение начальной фазы α огибающей рабочего сигнала несет
информацию об азимуте самолета. Для измерения величины α радиомаяк
излучает опорный сигнал, начальная фаза которого равна нулю в момент
прохождения максимума излучения вращающейся антенны маяка через
северное направление. Фаза опорного сигнала изменяется с частотой FВ = 30 Гц
и не зависит от направления, так как он излучается через ненаправленную
антенну.
Рабочий сигнал получается на борту самолета путем сложения сигналов
обеих антенн, и его фаза зависит от положения ВС. Опорный сигнал
формируется радиомаяком, и его фаза для всех направлений одинакова.
Вид рабочих сигналов, принимаемых на самолете при его различном
угловом положении, показан на рис. 2.81, в, д.
◦
Фаза огибающей uР2(t) рабочего сигнала для случая II (при α2 = 0 ) (см.
рис. 2.80) совпадает с начальной фазой φОП =0 опорного сигнала uР2(t)=uОП (t).
◦
Для случая I (при α1 > 0 ) фаза огибающей рабочего сигнала uР1(t) отстает
от фазы опорного сигнала.
Опорный сигнал передается радиомаяком VOR через ненаправленную
антенну на той же несущей частоте f0, что и рабочий. Для того чтобы эти
сигналы в дальнейшем можно было разделить в приемнике, опорным сигналом
модулируется по частоте с девиацией частоты ΔFП = ±480 Гц вспомогательный
сигнал с частотой FП = 9960 Гц (называемой поднесущей частотой). Этим
частотно-модулированным сигналом (рис. 2.81, ж)
ΔFП
u П (t) E П Cos 2FП t
Sin2FВ t
2FВ
(2.189)
осуществляется амплитудная модуляция сигнала ненаправленной антенны.
Таким образом, полный
модулированный
сигнал ненаправленной
антенны (независимо от направления) имеет вид (рис. 2.81, з)
e01(t) Em1 1
EП
ΔFП
Cos 2FП t
Sin2FВ t Cos2f0 t .
Em1
2FВ
(2.190)
В свою очередь, полный сигнал радиомаяка VOR (рис. 2.81, и, к),
принимаемый на самолете, представляет собой сумму модулированного
248
поднесущей сигнала ненаправленной антенны и немодулированного сигнала
направленной антенны
eΣ(t)= e01(t)+ e2(t)=
ΔFП
Em1 1 mCos(2FВ t ) mП Cos 2FП t
Sin2FВ t Cos2f0 t ,
2FВ
(2.191)
EП < Em2 < Em1,
где m — глубина амплитудной модуляции рабочего сигнала;
mП — глубина амплитудной модуляции поднесущей частоты;
α — угол азимута самолета;
FП — поднесущая частота;
FВ — частота вращения антенны;
ΔFП — девиация частоты поднесущей;
f0 — несущая частота сигнала радиомаяка;
Em1 – напряженность сигнала первой (ненаправленной) антенны;
Em2 — напряженность сигнала второй (направленной) антенны;
EП — напряженность сигнала поднесущей частоты.
◦
Полный сигнал радиомаяка VOR (для случая I при α1 = 60 ), принятый на
самолете, показан на рис. 2.81, и. При этом фаза рабочего сигнала φР = α1 .
Величина разности фаз между рабочим e2(t) и опорным e01(t) сигналами
измеряется в бортовом приемном оборудовании, структурная схема которого и
сигналы в нем показана на рис. 2.82.
На
выходе приемника получается
усиленный
суммарный
сигнал
радиомаяка eΣ(t). После амплитудного детектирования из него выделяется
огибающая суммарного сигнала uΣ(t).
При этом огибающая рабочего сигнала uР (t) изменяется с частотой FВ
= 30 Гц, а огибающая поднесущей опорного сигнала uП (t) — с частотой FП
(9960±480)Гц. Далее полосовыми фильтрами огибающая суммарного сигнала
=
разделяется по частоте на два разных канала. Рабочий сигнал uР (t), фаза
которого зависит от азимутального положения самолета α1, поступает
непосредственно на фазовый детектор.
uΣ (t)
Фильтр
FП
α1
eΣ(t)
Усилитель
Ограни
-читель
t
Частот.
детект.
Фазовра
-щатель
ξ
φОП +ξ
Амплит.
детектор
uП (t)
ПРМ
FВ
uОП (t)
eΣ (t)
Фильтр
uР2(t)
249
t
uП (t)
t
Преобразователь
uфд ~ α1
t
t
uОП (t)
Фазовый
детект.
uфд
ИКУ
ЭМ
uΣ(t)
φР
t
uР2(t)
Рис. 2.82. Структурная схема бортового приемного оборудования
VOR и сигналы в нем
Опорный
частотно-модулированный
сигнал
uП (t)
детектируется
частотным детектором, в результате чего на его выходе появляется сигнал
uОП(t), изменяющийся с частотой FВ=30 Гц, фаза которого привязана к северному
направлению. Для исключения влияния амплитуды частотно-модулированного
сигнала uП(t) на работу частотного детектора (ЧД) используется усилительограничитель, который обеспечивает постоянство амплитуды на входе ЧД.
Выходной сигнал частотного детектора также поступает через фазовращатель на
фазовый детектор, где происходит сравнение рабочего uР (t) и опорного uОП (t)
сигналов по фазе.
Выходной сигнал фазового детектора uфд пропорционален их разности фаз.
Сигнал фазового детектора через преобразователь управляет электромотором
ЭМ, поворачивающим ротор фазовращателя, который вносит дополнительный
фазовый сдвиг ξ в опорный сигнал. Величина этого фазового сдвига ξ зависит от
угла поворота ротора фазовращателя, который поворачивается до тех пор, пока
250
фазы рабочего φР и опорного сигналов φОП + ξ не сравняются. Тогда выходной
сигнал фазового детектора станет uфд = 0, и электромотор остановится, а угол
поворота ротора (с которым связана стрелка указателя курсовых углов ИКУ)
будет равен азимуту самолета α.
Всенаправленные
международным
ОВЧ-радиомаяки
угломерным
средством
VOR
ближней
являются
основным
навигации.
Однако
используемый ими диапазон волн подвержен сильным переотражениям от
любых
местных
предметов,
находящихся
вблизи
антенной
системы.
В результате на приемную антенну самолета приходят и прямой сигнал, и
переотраженный. Так как последний из них проходит большее расстояние, то он
отстает от прямого сигнала по фазе. Сложение их с учетом фазовых различий
вызывает появление паразитной амплитудной модуляции рабочего сигнала, что
снижает точность измерения азимута. Погрешность измерения азимута с
◦
помощью стандартного радиомаяка VOR может достигать 2–3 .
Для уменьшения влияния местных предметов на точность работы
стандартного радиомаяка VOR его устанавливают по возможности на
возвышенности рельефа местности.
Местность вокруг радиомаяка радиусом не менее 300 метров должна быть
ровной, с допустимым уклоном не более +0,04. Высота снежного и травяного
покрова не должна превышать 40 см.
Допускается наличие одиночных деревьев высотой до 9 м на расстоянии
не менее 150 м от радиомаяка. При этом рекомендуется проводить очистку от
деревьев территории радиусом до 600 м.
2.6.3. Доплеровский метод определения направления
Метод основан на использовании доплеровского эффекта, возникающего
при вращении антенны радиомаяка по окружности. Влияние доплеровского
эффекта приводит к отличию по частоте принятого сигнала от излученного на
величину доплеровской поправки (сдвига) частоты FД, если отлична от нуля
радиальная скорость Vr перемещения источника и приемника сигналов.
251
Рассмотрим
процесс
С
возникновения доплеровского эффекта
Ω
α
при вращении боковой антенны АБ по
окружности
радиусом
вокруг
R
При этом безразлично, являются
излучающими
или
0 АБ
Θ(t)=Ω t
R
'
центральной антенны АЦ (рис. 2.83).
антенны
3
3
АЦ
принимающими.
Если антенна излучающая, то
присутствовать
в
Δr
V
'
0
1
'
2
доплеровская поправка частоты FД
будет
α
Vr
'
2 1
Рис. 2.83. Процесс возникновения
доплеровского эффекта при вращении
антенны
сигнале,
принятом на самолете.
Если антенна принимающая, то
доплеровская поправка (сдвиг частоты) будет иметь место в ее сигнале.
Боковая антенна, равномерно вращающаяся с угловой скоростью Ω по
окружности радиусом R, имеет линейную скорость вращения V = ΩR. Тогда
радиальная составляющая этой скорости (см. рис. 2.83)
Vr = V Sin(Θ – α).
Величина доплеровской поправки частоты, возникающей при вращении
антенны, в соответствии с (2.79) определяется выражением
FД (t)
Vr
ΩR
Sin(t ) ,
(2.192)
где FД (t) — доплеровская поправка частоты;
λ— длина волны;
α — угол азимута самолета.
Из этого выражения видно, что величина доплеровской поправки (см. рис.
2.84, а) меняется во времени по гармоническому закону с частотой
Ω=2πFВ, определяемой частотой вращения антенны, а также зависит от
азимутального положения самолета α .
252
а
Tсдв
FD0( t )
FFD
Д (t)
( t)
T0
α=0
T'0 T1
–ΔFД
◦
◦
α = 75
ΔFД
T'1
T2
T'2 T3
T'3
T0
t
t
б
f0
eЦ(t)
t
u n( t )
t
α=0
в
◦
◦
α = 75
f0±FД (t)
eБ(t)
u nd 0( t )
t
u nd( t )
t
α=0
г
◦
◦
α = 75
( t )
Δφ(
t)
0 ( t )
t
t
1
TВ =
FВ
Рис. 2.84. Формирование сигналов при доплеровском методе:
а – доплеровская частота для двух значений азимута; б – сигнал центральной антенны;
в – сигнал боковой антенны для азимутов α = 0◦ и α = 75◦; г – разность фаз сигналов
центральной и боковой антенн для двух значений азимута
При положении боковой антенны в точках круговой траектории 0 и 2 (см.
рис. 2.83; моменты времени T0 и T2 на рис. 2.84), находящихся на линии,
соединяющей центральную антенну и самолет (для α=0°), радиальная скорость
Vr = 0, и, значит, доплеровская частота также нулевая. Когда боковая антенна
находится в точках траектории 1 и 3 (моменты времени T0 и T2), то значение
доплеровской частоты максимально и равно
ΔFД
ΩR
,
(2.193)
где ΔFД — девиация доплеровской частоты;
λ — длина волны.
Причем в точке 1 доплеровская поправка отрицательна, так как Vr >0 , а в
точке траектории 3 она положительна в силу того, что в ней Vr <0 .
253
Сигнал центральной антенны (рис. 2.84, б) не содержит доплеровской
поправки (так как она неподвижна относительно самолета) и описывается
выражением
eЦ(t)=EmЦ Cos2πf0 t ,
(2.194)
где EmЦ — амплитуда центральной антенны;
f0 — несущая частота сигнала.
Сигнал боковой антенны, имеющий из-за доплеровского эффекта сдвиг
частоты на величину FД (t), имеет вид
ΔFД
eБ (t ) EmБ Cos[2(f0 FД (t))t ] EmБ Cos2f0 t( 1
Sin(t )) ,
f0
где EmБ — амплитуда боковой антенны;
(2.195)
FД(t) — доплеровская частота.
Таким
образом,
сигнал
боковой
антенны
является
частотно-
модулированным (рис. 2.84, в).
◦
Если азимут самолета α = 0 , то есть точка 0 траектории (момент T0)
движения боковой антенны находится в северном направлении, то частота
сигнала боковой антенны в этот момент совпадает с частотой центральной
антенны, так как FД =0. По мере перемещения боковой антенны по траектории
вращения значение доплеровской частоты FД(t) будет изменяться. Поэтому
мгновенное значение частоты сигнала будет отличаться от несущей частоты f0 .
На участке траектории от точки 0 до точки 2 частота сигнала меньше f0 , так как
FД (t)<0, а на обратном участке больше f0 , так как FД (t)>0.
◦
'
При азимуте самолета, отличном от нулевого α ≠ 0 , точка 0 (находящаяся
на линии, соединяющей центральную антенну и самолет) сместится по часовой
стрелке на величину азимутального угла α (рис. 2.83). Поэтому момент T'0 для
'
точки 0 равенства доплеровской частоты нулю будет сдвинут относительно
момента T0 (северного положения) на время
T
Tсдв В ,
360
где TВ — период вращения боковой антенны;
α — азимутальный угол, град.
(2.196)
254
Это равносильно появлению в сигнале доплеровской частоты боковой
◦
◦
антенны для α ≠ 0 фазового сдвига (относительно случая, когда α = 0 ).
Между центральной и боковой антеннами имеется разность хода Δr волны
(рис. 2.83), которая изменяется во времени за счет вращения боковой антенны
по закону
Δr = RCos(Ωt – α),
(2.197)
где Ω — угловая скорость вращения антенны;
R — радиус вращения антенны.
Вследствие этого между сигналами антенн возникает разность фаз (рис.
2.84, г), которая в соответствии с (2.157) будет равна
ΔFД
2
R
Δ(t) Ц (t) Б (t)
Δr 2 Cos(t ) 2
Cos(t ) ,
Ω
(2.198)
m
где mφ — индекс фазовой модуляции.
При этом в моменты времени T0 и T2 , когда доплеровская частота FД =0 и
мгновенные значения частот сигналов обеих антенн равны, разность фаз Δφ
между их сигналами максимальна. В то же время в моменты T1 и T3 разность фаз
Δφ = 0, а доплеровская частота максимальна и мгновенное значение частот
сигналов обеих антенн отличаются на величину ± ΔFД .
Из выражений (2.192) и (2.198) видно, что и доплеровская поправка
частоты FД, и разность фаз Δφ сигналов центральной и боковой антенн зависят
от направления α прихода сигнала.
Таким образом, при доплеровском методе информация о направлении
заключена в начальной фазе закона изменения частоты, или фазы сигнала,
боковой антенны.
Доплеровский метод определения направления положен в основу
принципа действия доплеровского радиопеленгатора, а также доплеровского
всенаправленного ОВЧ-радиомаяка DVOR.
2.6.3.1. Доплеровский радиопеленгатор
Наземный доплеровский радиопеленгатор предназначен для определения
направления на самолет во время работы его радиопередающей станции
(в диапазоне частот 118–136,975 МГц). Принцип действия доплеровского
255
радиопеленгатора основан на доплеровском методе определения направления
прихода сигнала с борта воздушного судна.
Структурная схема такого радиопеленгатора и сигналы в нем показаны на
рис. 2.85.
Радиопеленгатор имеет две ненаправленные антенны, одна из которых АЦ
неподвижна, а вторая АБ вращается с угловой скоростью Ω=2πFВ вокруг нее по
окружности с радиусом R .
Допустим, что принимается непрерывный немодулированный сигнал.
Тогда сигнал eЦ(t), принимаемый центральной антенной, также будет
немодулированным (рис. 2.84, б). Ее фаза φЦ(t)=2πf0t .
Сигнал боковой антенны eБ(t) из-за эффекта Доплера, возникающего при
ее вращении, будет частотно-модулированным (рис. 2.84, в). Кроме того, фаза ее
сигнала будет отличаться от фазы центральной антенны на величину,
пропорциональную разности хода Δr сигнала между ними, которая определяется
в соответствии с выражением (2.197). Разность фаз сигналов обеих антенн будет
описываться выражением (2.198). При этом начальная фаза закона изменения
разности фаз (рис. 2.84, г) будет равна азимуту α самолета.
С
uЦ(t)
α
Фронт
волны
t
u n( t )
t
uБ(t)
Ω
t
u nd( t )
Θ(t)=Ω t
АЦ
R
eБ(t)
uБ(t)
Фазовый
детектор1
eЦ(t)
ЭМ
ПРМ2
uфд1(t)
АБ
Δr
uГОН(t)
ПРМ1
uфд2(α)
t
Индикатор
Фазовый
детектор2
uЦ(t)
Амплит.
детектор
ГОН
uГОН(t)
uГОН(t)
uфд1(t)
t
( t )
0 ( t )
t
uфд2(α)
uфд2(α)~α
Рис. 2.85. Структурная схема доплеровского радиопеленгатора
и сигналы в нем
t
256
Для измерения величины α сигналы обеих антенн поступают на
приемники, где осуществляется преобразование их частоты и усиление
uЦ(t)=Kус1EmЦ Cos2πfПЧ t ;
(2.199)
uБ(t)=Kус2EmБ Cos[2π fПЧ t(1+(ΔFД / fПЧ) Sin(2πFВt–α))] ,
где Kус1 , Kус2 — коэффициенты усиления приемников;
EmЦ , EmБ — амплитуда центральной и боковой антенн;
fПЧ — промежуточная частота сигнала;
ΔFД — девиация доплеровской частоты;
FВ — частота вращения боковой антенны.
Далее эти сигналы в первом фазовом детекторе сравниваются по фазе.
Выходной сигнал этого фазового детектора пропорционален разности фаз
входных сигналов:
ΔFД
Cos( 2FВ t ) .
(2.200)
FВ
Для извлечения информации об угле α из сигнала uфд1(t) он подается на
uфд1(t)
второй фазовый детектор, где сравнивается с опорным сигналом
uГОН(t) = EГОНCos(2πFВt) .
(2.201)
Опорный сигнал, вырабатываемый генератором опорного напряжения
(ГОН), управляет также вращением боковой антенны. Фаза опорного сигнала не
зависит от угла α. Таким образом, выходной сигнал uфд1(t) первого фазового
детектора и опорный сигнал uГОН(t) изменяются синхронно во времени, но
отличаются по фазе на постоянную величину, равную азимуту α . Поэтому
выходной сигнал второго фазового детектора постоянен и пропорционален
только величине азимута, то есть uфд1(t)~α .
Достоинством
доплеровского
радиопеленгатора
является
высокая
точность измерения направления. Это обусловлено тем, что информация об
азимуте заключена в фазе сигнала, на которую практически не влияют различия
амплитудных характеристик приемных каналов центральной и боковой антенн.
По этой же причине на точность измерения слабо влияет наличие в сигнале
амплитудной модуляции речевой информацией.
257
Для прослушивания речевой информации, поступающей с борта ВС,
сигнал приемника центральной антенны после амплитудного детектирования
подается на громкоговоритель.
2.6.3.2. Доплеровский всенаправленный радиомаяк DVOR
Доплеровский радиомаяк DVOR обеспечивает более высокую точность
измерения азимута, чем стандартный радиомаяк VOR, и поэтому используется
для
замены
последнего.
радионавигационное
поле,
DVOR
создает
что
стандартный
и
в
пространстве
VOR,
но
такое
с
же
помощью
доплеровского метода.
Антенная система доплеровского радиомаяка состоит из центральной
неподвижной антенны АЦ и боковой антенны АБ, вращающейся вокруг нее с
частотой FВ = 30 Гц по окружности радиусом R (рис. 2.83).
Радиомаяк излучает опорный и рабочий сигналы. Фаза рабочего сигнала
зависит от углового положения самолета относительно маяка, а фаза опорного
сигнала для всех направлений одинакова.
Рассмотрим процесс формирования этих сигналов.
Будем считать, что через центральную ненаправленную антенну АЦ
излучается непрерывное немодулированное колебание несущей частоты f0,
которое создает в точке нахождения самолета поле (рис. 2.86, а)
eЦ(t)= EmЦ Cos2πf0t ,
(2.202)
где EmЦ — амплитуда центральной антенны;
f0 — частота сигнала центральной антенны.
Боковая
антенна
также
излучает
непрерывное
немодулированное
колебание, но ее частота сдвинута относительно частоты центральной антенны
на постоянную величину, равную поднесущей частоте FП = 9960 Гц, то есть
частота излучения боковой антенны fБ = f0 + FП .
258
а
eЦ(t)ed( t )
t
α1 =0
б
t
◦
α2 =80
◦
EmЦ
FД (t)
t
ed 0 ( t )
в 1 .3 s0eР1(t)
d( t ) 6
t
EmБ
t
UБ
г
ed ( t )
eР(t)
t
s00d( t )
◦
α1 =0
д
t
α2 =80
◦
UБ
uБ(t)
t
Em0
е
eЦО(t)
e1 d( t )
t
s0 d( t ) 6
EmЦ
t
◦
α1 =0
ed 0 0 ( t )
s0 0 0d(e
t )Σ(t)
s0 d( t )
ж
t
s0 d( t ) 6
◦
t
α2 =80
ed 0 ( t )
s0 0 d( t ) s0 d( t )
t
з s0 d( et )Σ(t)
6
t
Tм
Рис. 2.86. Формирование полного сигнала ОВЧ-радиомаяка DVOR:
а – немодулированный сигнал центральной антенны;
б – доплеровская поправка частоты; в)– суммарный сигнал для α1 =0◦;
г – суммарный сигнал для α2 =80◦; д)– огибающая биений суммарного сигнала;
е – амплитудно модулированный сигнал центральной антенны;
ж – полный сигнал доплеровского радиомаяка DVOR для α1 =0◦;
◦
з – полный сигнал доплеровского радиомаяка DVOR для α2 =80
259
За счет вращения боковой антенны частота сигнала, принимаемого от нее
на самолете, приобретает доплеровскую поправку FД (t) (рис. 2.86, б). Закон
изменения доплеровской частоты определяется выражением (2.192) и зависит
от азимута α . При этом радиус вращения R выбирается в соответствии с (2.193)
таким, чтобы девиация частоты ΔFД = ±480 Гц .
Таким образом, сигнал боковой антенны, принимаемый на самолете,
становится частотно-модулированным и имеет вид
ΔFД
eБ (t) EmБ Cos[2(f Б FД (t))t ] EmБ Cos2f Б t( 1
Sin( 2FВ t )) ,
fБ
(2.203)
где EmБ — амплитуда боковой антенны;
fБ — частота сигнала боковой антенны;
ΔFД — девиация доплеровской частоты;
FВ — частота вращения боковой антенны.
В силу того, что частоты центральной и боковой антенн близки по
величине fЦ ≈ fБ , а EmЦ > EmБ , их суммарный сигнал eР(t)= eЦ(t)+ eБ(t) в точке
нахождения
самолета
из-за
эффекта
биений
будет
амплитудно-
модулированным (рис. 2.86, в; рис. 2.86, г). Огибающая биений суммарного
сигнала (рис. 2.86, д) будет частотно-модулирована за счет эффекта Доплера
uБ(t)=UБ Cos[2π(fП +ΔFД Sin(2πFВ t))t – α],
(2.204)
где UБ — амплитуда биений;
fП — частота поднесущей;
α — азимут самолета.
При этом начальная фаза сигнала биений определяется величиной α.
Таким образом, суммарный сигнал eР(t) обеих антенн представляет собой
рабочий сигнал, зависящий от азимутального положения самолета α (рис. 2.86,
◦
◦
в, для α1 = 0 и рис. 2.83, г, для α2 =80 ).
Опорный сигнал, начальная фаза которого не зависит от направления,
излучается через центральную ненаправленную антенну. Он представляет собой
сигнал, амплитудно-модулированный с частотой FВ = 30 Гц (рис. 2.86, е),
E
u ЦО(t) EmЦ 1 mo Cos2FВ t Cos2f 0 t ,
EmЦ
где Emо — амплитуда модуляции опорного сигнала.
(2.205)
260
Полный
сигнал
радиомаяка
DVOR,
принимаемый
на
самолете,
представляет собой сумму eΣ(t)= eЦО(t)+eБ(t) амплитудно-модулированного
опорным напряжением (с частотой FВ =30 Гц) сигнала центральной антенны и
сигнала боковой антенны, амплитуда которой модулирована поднесущей
(с частотой 9960±480 Гц) из-за влияния доплеровского эффекта и эффекта
◦
биений. Вид полного сигнала радиомаяка DVOR для азимута α1 = 0 показан на
◦
рис. 2.86, ж, а для α2 = 80 — на рис. 2.86, з.
Сигналы радиомаяков DVOR и VOR имеют одинаковую структуру, что не
требует изменений в бортовой приемной аппаратуре. Однако имеются и
некоторые различия в сигналах этих радиомаяков.
У доплеровского радиомаяка DVOR опорный сигнал формируется маяком
и передается в виде амплитудно-модулированного сигнала с частотой FВ =30 Гц
через центральную ненаправленную антенну. Рабочий сигнал образуется на
самолете за счет совместного действия эффекта биений и доплеровского
эффекта при сложении сигналов обеих антенн. В результате рабочим сигналом
является частотно-модулированная поднесущая с частотой FП = 9960±480 Гц.
В стандартном радиомаяке VOR опорный сигнал также формируется
маяком. Он передается в виде частотно-модулированной поднесущей с частотой
9960±480 Гц через ненаправленную антенну. Рабочий сигнал образуется на
самолете при сложении сигналов ненаправленной и направленной вращающейся
антенн радиомаяка и имеет вид амплитудно-модулированного сигнала с
частотой FВ =30 Гц.
Таким образом, у радиомаяков DVOR и VOR частоты, на которых
передаются опорный и рабочий сигналы, поменялись местами. Для примера
показаны (рис. 2.87) сигналы, принятые на самолете от радиомаяков DVOR и
VOR для двух значений азимута.
На рис. 2.87 показано, что сигналы для нулевого азимута у обоих
радиомаяков полностью совпадают. По мере увеличения азимута происходит
сдвиг начальной фазы рабочего сигнала, что равносильно его сдвигу по
времени.
261
а
es 00 ( t )
t
s0 0 0d( t ) s0 s( t )
s0 s( t ) 6
t
б
ed 0 0 ( t )
t
s0 0 0d( t ) s0 d( t )
s0 d( t ) 6
t
в
ed 0 ( t )
t
s0 0 d( t ) s0 d( t )
s0 d( t ) 6
t
Tм
Рис. 2.87. Сигналы, принятые на самолете:
а – от стандартного VOR для азимута α = 120◦ ; б – стандартного VOR и
доплеровского DVOR для азимута α = 0◦ ; в – доплеровского DVOR
для азимута α =120◦
У стандартного VOR это выражается во временном сдвиге огибающей
сигнала с частотой 30 Гц, а у доплеровского DVOR — в сдвиге частотномодулированного сигнала на поднесущей частоте 9960±480 Гц. При этом фазы
опорных сигналов остаются неизменными. Это видно из сравнения рис. 2.87, а,
и 2.87, б,
для сигнала поднесущей 9960±480 Гц у стандартного VOR.
У доплеровского радиомаяка неизменной остается фаза огибающей сигнала 30
Гц , что видно из сравнения рис. 2.87, б, и 2.87, в.
Доплеровский
радиомаяк
обеспечивает
более
высокую
точность
измерения азимута, чем стандартный VOR, в силу того что его сигнал
подвержен меньшим искажениям от переотражения от местных предметов.
Действительно, возникающая при этом паразитная амплитудная модуляция
рабочего сигнала почти не влияет на информацию об азимуте, которая
содержится в частотной модуляции поднесущей.
Дальнейшее повышение точности радиомаяка возможно путем передачи
опорного сигнала на второй частотно-модулированной поднесущей с частотой
FП2 = 6500 Гц, как это сделано в прецизионном радиомаяке PDVOR. Однако для
262
A A1 A2
A3
A47 48
Δβ
A4
приема
сигнала
прецизионного
радиомаяка
требуется другая бортовая приемная аппаратура,
что препятствовало в свое время внедрению
этих радиомаяков.
ΔL
В
R
AЦ
рассмотренном
доплеровском
радиомаяке использована одна боковая антенна
с механическим вращением. В современных
радиомаяках механическое вращение заменено
имитацией
A26 A
вращения
этой
антенны
путем
последовательного переключения с частотой
25
Рис. 2.88. Антенная система
радиомаяка DVOR
FВ=30
Гц
неподвижных
вибраторов,
расположенных по окружности радиуса R (рис.
2.88). При этом плавное изменение доплеровской частоты при повороте антенны
трансформируется в ступенчатое, что несколько снижает точность измерения.
Определим допустимое угловое расстояние Δβ между соседними антеннами
[3].
В соответствии с теоремой Котельникова интервал дискретизации должен
быть не более
-
Δt ≤ 0,5( f max ) 1 ,
где fmax — верхняя граничная частота спектра сигнала.
Спектр частотно-модулированного сигнала состоит из бесконечного ряда
гармонических
составляющих
±
При
nΩ.
этом
существенными
для
воспроизведения сигнала являются гармоники в интервале до ±mφ Ω , то есть
2f max m Ω
2R
Ω ,
где mφ — индекс фазовой модуляции, определяемый в соответствии с (2.198).
Отсюда интервал дискретизации доплеровского сигнала
Δt
Δ
.
Ω
2 RΩ
(2.206)
Тогда угловой разнос соседних антенн должен быть не более Δβ ≤ λ/2R ,
а линейное расстояние (рис. 2.88) между ними ΔL ≤ RΔβ = λ/2 .
В
таком
радиомаяке
одновременно
излучают
сигнал
два
противоположных вибратора, например, А1 – А25 , А2 – А26 , А3 – А27 и т. д.
263
Причем в каждой паре один вибратор излучает непрерывный сигнал с частотой
f0 + FП , а другой — с частотой f0 – FП .
2.6.4. Комбинированные методы определения направления
Основными информационными параметрами сигнала при определении
направления являются амплитуда и фаза. В комбинированных методах
определения направления используется зависимость амплитуды или фазы
между собой или от других параметров сигнала.
Одним из таких комбинированных методов является амплитудновременной метод, применяемый в микроволновой системе посадки MLS. На
борту
воздушного
прохождения
судна
возникают
него
максимума
мимо
импульсные
сигналы
сканирующей
в
момент
узконаправленной
диаграммы антенны наземного радиомаяка. При этом информация об угловом
положении ВС содержится во временном интервале между двумя принятыми на
его борту импульсами.
Другим комбинированным методом является амплитудно-доплеровский
метод, используемый при измерении угла сноса с помощью бортовой
радиолокационной станции (БРЛС). При этом радиолокатор принимает
амплитудно-модулированный сигнал, отраженный от земной поверхности. Угол
сноса определяется по направлению антенны БРЛС в момент, когда ширина
спектра доплеровских частот отраженного сигнала минимальна.
2.6.4.1. Микроволновая система посадки, реализующая
амплитудно-временной метод измерения углов
Амплитудно-временной
метод
измерения
углов
используется
в
радиомаячной системе посадки сантиметровых волн (микроволновой системе
посадки MLS). В состав MLS входят [12] азимутальные (АРМ) и угломестный
(УРМ) радиомаяки, предназначенные для измерения на борту ВС его углового
положения относительно них в горизонтальной и вертикальной плоскостях. Для
264
измерения
расстояния
используется
ретранслятор
дальномера
DME,
совмещенный с АРМ.
Азимутальный
и
угломерный
радиомаяки
имеют
веерные
ДНА,
сканирующие с большой угловой скоростью в своем рабочем секторе. Каждый
из
радиомаяков
излучает
в
течение
рабочего
цикла
непрерывное
немодулированное колебание несущей частоты в диапазоне 5031–5090,7 МГц.
Рассмотрим принцип измерения азимута на борту ВС на примере работы
азимутального радиомаяка (рис. 2.89).
Рабочий цикл маяка состоит из прямого и обратного ходов ДНА, в течение
акоторых антенна сканирует рабочий сектор от одной границы -Θmax до другой
Θmax и обратно (рис. 2.89, в). Между ними выдерживается временная пауза
а
Θ(t)
TЦ
Прямой ход
TОБ
Пауза
Обратный ход
Θmax
α
º
ΘC
в
TП
TПР
t
0
ΘC
α
º
0
АРМ
Θ(t)
«обратно»
Ω
«туда»
Θ0
-Θmax
T0
U
б
Θmax
t2
t1
Импульс
«туда»
tИ
Импульс
«обратно»
τс
«обратно»
Ω
t
º
ΘC
«туда»
0
-Θmin
УРМ
Рис. 2.89. Принцип измерения азимута амплитудно-временным методом:
а – зависимость изменения углового положения антенны АРМ от времени;
б – формирование импульсных сигналов АРМ на борту ВС; в – сканирование ДНА
в рабочем секторе радиомаяков АРМ и УРМ
265
длительностью ТП , за время которой антенна остается неподвижной на границе
сектора Θmax и не излучает сигнал. График зависимости изменения углового
положения антенны Θ(t) от времени показан на рис. 2.89, а.
Длительность рабочего цикла ТЦ складывается из времени прямого ТПР и
обратного ТОБ хода (которые для АРМ равны) и длительности паузы ТП:
TЦ TПР TОБ TП 2
ΘС
TП .
Ω
(2.207)
В момент времени, когда ДНА маяка направлена на самолет, на выходе
его приемника появляется импульсный сигнал, длительность которого зависит
от ширины диаграммы антенны Θ0 и ее угловой скорости сканирования Ω :
τс = Θ0 / Ω .
За рабочий цикл на выходе приемника возникают два таких импульса при
движении антенны на прямом (импульс «туда») и обратном (импульс
«обратно») ходе (рис. 2.89, б).
На рисунке показано, что временной интервал tИ между этими импульсами
определяется величиной углового отклонения α воздушного судна от линии
нулевого угла в рабочем секторе радиомаяка. За линию нулевого угла в
азимутальном радиомаяке принимается биссектриса рабочего сектора, которая
совпадает с осью ВПП. В угломестном радиомаяке линия нулевого угла
является горизонталью, проходящей через фазовый центр антенны.
Временная задержка этих импульсов относительно начала прямого и
обратного хода ДНА будет, в зависимости от величины углового отклонения α,
равна
t1
1 ΘC
;
Ω 2
t2
1 ΘC
.
Ω 2
(2.208)
Тогда временной интервал между принятыми импульсами
Θ 2
t И TПР t1 TП t 2 TП C ,
Ω Ω
(2.209)
T0
где ТП — длительность паузы;
ТО — интервал сканирования антенны между линиями нулевых направлений;
266
ΘС — угловой размер сектора сканирования антенны радиомаяка;
Ω — угловая скорость сканирования антенны радиомаяка;
α — угловое отклонение ВС от линии нулевого направления;
Зависимость временного интервала между принимаемыми на самолете
импульсами радиомаяков MLS (для значений технических параметров,
приведенных в табл. 2.2) от углового отклонения приведена на рис. 2.90.
Таблица 2.2
Параметры радиомаяков микроволновой системы посадки
Радиомаяк
Максим.
угол сканировования
Θс , град
АРМ
± 62
13000
АРМО
± 42
УРМ
–1,5 + 29,5
Максим.
Интервал
значение
ТО , мкс
tИ , мкс
Средняя
частота
работы
за 10 с , Гц
Пауза
ТП ,
мкс
Угловая
скорость
сканировования
Ω , град/мкс
6800
600
0,020
13±0,5
9000
4800
600
0,020
6,5±0,25
3500
3350
400
0,020
39±1,5
Отсюда получим выражение, связывающее измеренный временной
интервал
tИ , мс
tИ
угловым отклонением ВС
15
от нулевого направления
АРМ
12,5
(T0 t И )
10
АРМО
Ω
.
2
(2.210)
Аналогичным образом
7,5
работают все радиомаяки
системы
5
УРМ
-60◦
-40◦
-20◦
посадки
MLS.
При этом все они излучают
2,5
0
с искомым
◦
0
◦
20
◦
40
◦
α
60
Рис. 2.90. Зависимость временного интервала между
принимаемыми импульсами MLS от отклонения ВС
от нулевого направления
сигнал на одной частоте,
но поочередно. При этом
средняя
частота
угломестного
работы
радиомаяка
267
больше, чем азимутальных, в силу большей важности информации о
вертикальном положении самолета.
Вид радиомаяка на борту самолета определяется кодом опознавания,
передаваемым перед началом прямого хода сканирования антенны.
Кроме того, периодически на этой же частоте через секторную антенну в
пределах всего рабочего сектора радиомаяка методом фазового кодирования
передаются основные и дополнительные данные. Они содержат данные о
техническом состоянии систем и их характеристиках, метеоинформацию,
сведения о состоянии ВПП и прочую информацию, необходимую для измерения
положения ВС в рабочей зоне системы посадки.
Возможность измерения удаления ВС от ретранслятора дальномера,
совмещенного с АРМ, позволяет определять его линейные отклонения от линий
нулевого угла в горизонтальной Z и вертикальной H плоскостях [6]:
Z = R Sinα ;
L
H RSin arcsin Sin ,
R
(2.211)
где α — угловое отклонение ВС от линии нулевого угла в горизонтальной
плоскости;
β — угловое отклонение ВС от линии нулевого угла в вертикальной плоскости;
R— удаление ВС от ретранслятора дальномера;
L — расстояние между угломестным и азимутальным маяками.
Использование в MLS антенн с узкими диаграммами направленности (1–
◦
2 ) и временная селекция импульсных сигналов на борту ВС позволяют
существенно снизить влияние переотражений от местных предметов на
точность измерений.
Микроволновая система посадки MLS, в отличие от системы посадки ILS,
не
задает
никакой
траектории
посадки,
которая
задается
бортовым
оборудованием в виде программного изменения углового (или линейного)
положения ВС от расстояния. Далее, сравнивая фактические координаты с
программными, определяются управляющие команды для вывода ВС на
заданную траекторию посадки.
Кроме того, меньшая погрешность измерений, а также использование
дополнительного азимутального радиомаяка обратного азимута (АРМО)
268
позволяет обеспечивать ВС информацией о его положении не только на этапе
посадки, но и при движении по ВПП, а также на взлете и уходе на второй круг в
сложных метеоусловиях.
2.6.4.2. Амплитудно-доплеровский метод измерения угла сноса
На этом методе основано измерение угла сноса с помощью бортовой
радиолокационной станции (БРЛС), которая излучает через веерную ДНА в
направлении земной поверхности зондирующий импульс длительностью τИ (рис.
2.91).
При этом в каждом периоде повторения зондирующих импульсов будет
облучаться некоторая площадка Si на земной поверхности. Эта площадка
представляет собой сечение разрешаемого объема (в пределах которого
содержится половина энергии зондирующего импульса) плоскостью земной
поверхности. Облучаемая площадка перемещается вдоль земной поверхности из
точки А в точку В (рис. 2.91).
Размер площадки Si в продольном направлении зависит от длительности
импульса τИ и угла наклона γ :
c И
.
(2.212)
l
2Cos
В поперечном направлении размер площадки определяется шириной ДНА
в горизонтальной плоскости ΘГ и наклонной дальностью r до нее:
d = r ΘГ .
(2.213)
В силу движения ВС относительно земной поверхности сигнал, принятый
БРЛС от каждого элементарного отражателя площадки Si , будет иметь
положительный доплеровский сдвиг частоты FД .
В общем виде для центра отражающей площадки Si при угле наклона γ
доплеровский сдвиг несущей частоты сигнала в соответствии с (2.84)
FД
2W
Cos(Ψ )Cos ,
где W — путевая скорость;
λ — длина волны излучаемого электромагнитного колебания;
ψ — угол поворота диаграммы направленности антенны БРЛС;
γ — угол наклона диаграммы направленности антенны БРЛС;
α — угол сноса.
(2.214)
269
α
V
W
γmax γ γmin
cτИ
2
= Δr
H
r
l
ψ1
ψ2
А
d
1'
А
В
0'
2'
ΘГ
Si
2
1
ΘГ
В
Рис. 2.91. Измерение угла сноса бортовым радиолокатором
Из этого выражения определим зависимость величины доплеровского
сдвига частоты от угла поворота ψ антенны БРЛС в горизонтальной плоскости
(при фиксированном угле наклона γ = Const )
FД (Ψ )
2WCos
Cos(Ψ ) .
(2.215)
Из (2.215) следует, что максимального значения доплеровский
частоты FД max
сдвиг
достигает при угле поворота антенны, равном углу сноса
самолета ψ = α .
Полярная диаграмма изменения доплеровской частоты FД (ψ) от угла
поворота антенны БРЛС показана на рис. 2.92, а.
Аналогично из (2.214) определится зависимость величины доплеровского
сдвига частоты от угла наклона γ антенны БРЛС в вертикальной плоскости (при
фиксированном угле поворота ψ = Const ):
FД ( )
2WCosΨ
Cos .
(2.216)
270
а
FД (ψ)
γ = Const
V
V
в
ψ
α
ψ
0
W
FД max
2
FД = 0
ε
W
Si
ΘГ
ψ = Const
FД max
FД = 0
γ
H
'
ΘГ
1
б
1
–ε
'
'
δψj
2
α
W
Δγ
FД (γ)
δγj
Δr
r
l
Рис. 2.92. Диаграмма изменения доплеровской частоты от направления:
а – в горизонтальной плоскости FД (ψ); б – в вертикальной плоскости FД (γ);
в – в пределах ширины ДНА
Отсюда видно, что для увеличения FД (γ) необходимо уменьшать угол
наклона антенны.
Полярная диаграмма изменения доплеровской частоты FД (γ) от угла
наклона антенны радиолокатора показана на рис. 2.92, б.
Размеры отражающей площадки ограничены из-за конечных размеров
ширины ДНА радиолокатора в горизонтальной плоскости ΘГ и разрешающей
способности по дальности Δr, определяемой длительностью зондирующего
импульса τИ .
Угол визирования отражающей площадки Δγ определяется выражением
Δ
Δr
tg ,
r
где γ — угол наклона в вертикальной плоскости;
(2.217)
271
Δr — разрешающая способность по дальности;
H — высота полета;
r = H / Sin γ — наклонная дальность.
Все элементарные отражатели, находящиеся в пределах площадки Si,
будут отражать сигнал в направлении БРЛС. При этом отраженному сигналу
каждого j-го элементарного отражателя будет присуще свое значение
доплеровского сдвига частоты FД j (ψ,γ). Таким образом, сигнал, принимаемый
радиолокатором, будет обладать спектром доплеровских частот.
Определим ширину доплеровского спектра частот, если направление оси
ДНА не совпадает с направлением вектора путевой скорости (см. рис. 2.92, а).
Доплеровская частота для любого j-го элементарного отражателя в
пределах площадки Si в соответствии с (2.214) будет определяться выражением
FД j
2W
Cos(Ψ Ψ j )Cos( j ) ;
(2.218)
ΘГ
Θ
Ψ j Г ;
2
2
Δr
Δr
tg j
tg ,
2r j
2r j
где ΘГ — ширина ДНА в горизонтальной плоскости;
Δγ , — угол визирования отражающей площадки;
Ψ, γ — углы поворота и наклона диаграммы направленности антенны БРЛС;
α — угол сноса;
δψj , δγj — угловое отклонение в горизонтальной и вертикальной плоскостях j-го
элементарного отражателя от центра отражающей площадки;
rj — наклонная дальность до j-го элементарного отражателя.
По мере удаления отражающей площадки Si от воздушного судна
величина Δγ растет, но она невелика: Δγ < ΘГ . Поэтому основное влияние на
ширину доплеровского спектра частот оказывает поперечный размер
отражающей площадки.
Тогда максимальное значение доплеровской частоты в пределах площадки
Si в соответствии с (2.218) будет получено от элементарного отражателя,
находящегося в точке 1 (рис. 2.92, а):
FД max FД 1
Θ
Δr
CosΨ Г Cos
tg .
2
2r j
2W
272
Минимальное значение доплеровской частоты будет получено от
отражателя в точке 2:
FД min FД 2
Θ
Δr
CosΨ Г Cos
tg .
2
2r j
2W
В этом случае ширина спектра доплеровских частот
ΔFД FД1 FД 2
4W
Sin
ΘГ
Δr
Sin(Ψ )Cos
tg .
2
2r j
(2.219)
На рис. 2.93, а показана зависимость ширины спектра доплеровских
частот от угла наклона γ в вертикальной плоскости для различных значений угла
ψ поворота антенны. Расчет зависимости выполнен в соответствии с (2.219) для
°
следующих параметров полета (рис. 3.87): W=250 м/с; H=10000 м; α=10 ; λ=
°
°
°
0,03 м; τИ =2 мкс; ΘГ =3 ; γmin = 30 ; γmax = 60 .
Из выражения (2.219) следует, что ширина доплеровского спектра частот
становится равной нулю (ΔFД = 0) при совпадении направления ДНА антенны и
вектора путевой скорости ψ=α. Однако из-за конечных размеров ДНА
радиолокатора в горизонтальной плоскости ΘГ ширина доплеровского спектра
в этом случае будет отлична от нуля.
Максимальное значение доплеровской частоты при нахождении вектора
путевой скорости в пределах ширины ДНА (рис. 2.92, в) будет получено от
элементарного отражателя, находящегося в точке 0' (в направлении максимума
диаграммы направленности). В соответствии с (2.214) ее значение
2W
Cos .
При отклонении вектора путевой скорости от направления максимума
FД 0 FД max
ДНА на угол ± ε в любую сторону (рис. 2.92, в) величина доплеровского сдвига
частоты будет уменьшаться и достигнет наименьшего значения в направлениях
на точки 1' и 2':
FД 1 FД 2 FД min
Θ
CosCos Г .
2
2W
Тогда ширина спектра доплеровских частот (с учетом малости углов ΘГ и ε )
ΔFД FД max FД min
2
Θ
W Θ
Cos 1 Cos Г Г Cos .
2
2
2W
(2.220)
273
ΔFД , Гц
ΔFД′ , Гц
γ =30°
110
100100
γ =45°
90
8080
Fr9 ( )
Fr10 ( )
70
6060
Fr11 ( )
50
Fr12 ( 40
) 40
30
2020
ψ =18
°
ψ =16
°
ψ =14
°
ψ =11,5
10
00
30
°
45
°
60
°°
γ =60°
°
γ,
град
а)
°
-1,5 -1,0
°
°
-0,5
0
°
0,5
°
1,0
°
°
1,5
ε,
град
б)
Рис. 2.93. Зависимость ширины спектра доплеровских частот: а – от угла наклона γ для
различных значений угла поворота антенны ψ ; б – от угла отклонения ε относительно
максимума ДНА для различных значений угла наклона γ
Зависимость ширины спектра доплеровских частот от угла отклонения ε
от направления максимума ДНА в горизонтальной плоскости для различных
значений угла наклона антенны γ, рассчитанной в соответствии с (2.220),
приведена на рис. 2.93, б.
Ширина спектра минимальна (но не равна нулю) в направлении
максимума диаграммы при ε = 0, то есть когда угол поворота антенны совпадает
с направлением вектора путевой скорости:
ΔFД min
W 2
Θ Cos .
4 Г
(2.221)
Сигналы, отраженные от всех элементарных отражателей площадки Si ,
одновременно поступают в приемник БРЛС. При совместном усилении в нем
близких по частоте сигналов возникает эффект биений, вызывающий
амплитудную модуляцию суммарного выходного сигнала приемника. Частота
амплитудной модуляции при этом равна разности частот входных сигналов, то
есть определяется шириной доплеровского спектра сигналов, отраженных от
площадки Si . Наличие амплитудной модуляции выходного сигнала приводит к
яркостной модуляции развертки дальности на индикаторе БРЛС с частотой
биений.
274
В процессе измерения угла сноса с помощью БРЛС используется веерная
диаграмма направленности, сканирование которой в горизонтальной плоскости
останавливается.
На
индикаторе
БРЛС
отображается
линия
развертки
дальности, угол поворота которой соответствует углу поворота антенны. При
этом яркость свечения развертки пульсирует во времени с частотой биений,
равной ширине доплеровского спектра частот.
Человеческий глаз из-за инерционности зрения не различает пульсации
яркости изображения (порог чувствительности по частоте), если их частота
превосходит критическое значение в 40–45 Гц.
Если направление оси ДНА сильно отличается от направления вектора
путевой скорости, то частота биений, как видно на рис. 2.93, а, намного
превышает критическую частоту и пульсации яркости развертки не заметны.
Пульсации яркости развертки дальности становятся ниже критического
значения частоты и, значит, обнаруживаются визуально, когда угол поворота
антенны близок к углу сноса (рис. 2.93, б). Минимальное значение частоты
пульсаций (около 5 Гц) наблюдается при совпадении направлений оси ДНА и
вектора путевой скорости.
При измерении угла сноса антенну БРЛС вручную поворачивают в
горизонтальной плоскости до появления визуально наблюдаемых пульсаций
яркости развертки дальности на экране индикатора. В момент достижения
частотой пульсаций яркости развертки своего минимального значения поворот
антенны прекращают. При этом направление развертки дальности, которое
измеряют по азимутальной шкале индикатора, совпадает с углом сноса
самолета.
Признаком
такого
совпадения
является
минимум
ширины
доплеровского спектра частот, о котором судят по визуальным изменениям
яркости развертки дальности.
Определим яркостные изменения развертки. Размеры отражающей
площадки Si невелики, и можно считать, что значение коэффициента отражения
в ее пределах постоянно.
275
Максимальное значение сигнала Umax, принятого приемником БРЛС, будет
получено от элементарного отражателя, находящегося в точке 0' (рис. 2.92, в),
соответствующего направлению максимума ДНА (F(ε = 0)=1).
Минимальное значение Umin сигнала на входе приемника соответствует
отражению от точек 1' и 2'. Оно определяется значением квадрата диаграммы
направленности антенны (так как антенна используется и на передачу, и на
прием) на уровне, равном ее ширине (F(ε =ΘГ /2)=0,707),
2
U min U max F ( ΘГ 2 ) 0,5U max .
Относительное изменение амплитуды ΔU принятого сигнала от угла Δε в
пределах ширины ДНА
2
ΔU U max U min U max U max F ( 0.5ΘГ ) U max
.
Δ
0.5ΘГ
0.5ΘГ
ΘГ
Отсюда следует, что
ΘГ
ΔU ,
U max
где Δε — угловое отклонение от направления максимума ДНА;
Δ
(2.222)
ΔU — изменение амплитуды сигнала при отклонении от направления максимума
ДНА;
Umax — максимальная амплитуда сигнала в направлении максимума ДНА;
ΘГ — ширина диаграммы направленности антенны.
При визуальном наблюдении по яркостному индикатору изменение
яркости уверенно обнаруживается оператором, если величина ее относительного
приращения составляет kпор = 0,05 – 0,1 .
На выходе приемника после амплитудного детектирования амплитуда
сигнала биений
2
U Б 0.5(U max U min ) 0.5[U max U max F ( 0.5ΘГ )] 0.25U max .
(2.223)
Используя выражение (2.222), можно оценить погрешность измерения
угла сноса по результатам яркостных изменений, вызванных амплитудой
биений. Для этого изменение амплитуды сигнала ΔU примем в (2.222) равным
обнаруживаемой визуально величине: ΔU= kпор UБ .
276
Тогда погрешность определения угла сноса σα с помощью БРЛС
ΘГ
Θ
kпорU Б kпор Г .
U max
4
(2.224)
°
Для ширины диаграммы антенны ΘГ =3 погрешность измерения угла
°
°
сноса в соответствии с (2.224) составляет σα = 0,04 – 0,08 . Таким образом,
метод позволяет определять угол сноса с высокой точностью. Однако достичь
такой потенциально высокой точности в реальных измерениях не удается. Это
вызвано тем, что измерение угла сноса осуществляется по азимутальной шкале
радиолокационного индикатора. Поэтому общая погрешность измерения
включает в себя также погрешность отсчета угла по шкале и погрешность
совпадения направления развертки индикатора и положения антенны; величина
°
общей погрешности измерения угла сноса с помощью БРЛС составляет 1 °
1,5 .
Разновидность этого метода определения угла сноса используется в
однолучевых доплеровских измерителях (ДИС). В них также поворачивают
антенну в горизонтальной плоскости до совпадения направлений оси ДНА и
вектора путевой скорости. Однако признаком такого совпадения в однолучевом
доплеровском измерителе является достижение измеряемой доплеровской
частотой своего максимального значения.
277
Литература
1. Бартон Д., Вард Г. Справочник по радиолокационным измерениям: – М.: Советское
радио, 1976. – 392 с.
2. Белавин О. В. Основы радионавигации: Учебник для вузов. – М.: Советское радио,
1967. – 470 с.
3. Беляевский Л. С., Новиков В. С., Олянюк П. В. Основы радионавигации: Учебник для
вузов. – М.: Транспорт, 1982. – 288 с.
4. Варакин Л. Е. Теория сложных сигналов: – М.: Советское радио, 1970. – 376 с.
5. Григорьев С. В. Организация радиотехнического обеспечения полетов. Ч. 2.
Оптимизация структуры и размещения средств радиотехни-ческого обеспечения
полетов: Уч. пособие. – СПб.: Университет ГА, 2008. – 76 с.
6. Григорьев С. В. О возможности использования микроволновой системы посадки для
управления воздушным судном при уходе на второй круг: В кн.: Навигация и
управление воздушным движением. – Л.: Академия ГА, 1979. – С. 67-69.
7. Грудинская Г. П. Распространение радиоволн: Учебник для вузов. – М.: Высшая
школа, 1975. – 280 с.
8. Кудряков С. А. Основы теории радиотехнических сигналов и цепей: Уч. пособие для
вузов. – СПб.: «Свое издательство», 2014. – 325 с.
9. Кук Ч., Бернфельд М. Радиолокационные сигналы: – М.: Советское радио, 1971. – 568
с.
10. Нечаев Е. Е., Будыкин Ю. А. Антенные устройства в гражданской авиации: Учебник
для вузов. – Курск: «Пресс-факт», 2005. – 380 с.
11. Олянюк П.В., Астафьев Г.П., Грачев В.В. Радионавигационные системы и устройства
гражданской авиации: Учебник для вузов. – М.: Транспорт, 1983, – 320 с.
12. Олянюк П. В., Грачев В. В. Авиационное радиооборудование: Учебник для вузов. –
М.: Транспорт, 1989. – 319 с.
13. Перов А. И. Основы построения спутниковых радионавигационных систем. – М.:
Радиотехника, 2012. – 240 с.
14. Радиоэлектронные системы: основы построения и теории. Справочник/ Под ред.
Я. Д. Ширмана – М.: ЗАО «МАКВИС», 1998. – 828 с.
15. Соболев Е. В. Организация радиотехнического обеспечения полетов. Ч. 1. Основные
эксплуатационные требования к авиационным комплексам навигации, посадки, связи и
наблюдения: Уч. пособие/ СПбГУГА. – СПб., 2008. – 97 с.
278
16. Справочник по радиолокации: В 4-х тт.)/ Под ред. М. Сколника: – М.: Советское
радио, 1976.
17. Тихонов В. И. Статистическая радиотехника: – М.: Радио и связь, 1982. – 624 с.
18. Тучков Н. Т. Автоматизированные системы и радиоэлектронные средства управления
воздушным движением: Учебник для вузов. – М.: Транспорт, 1994. – 368 с.
19. Финкельштейн М. И. Основы радиолокации: – М.: Советское радио, 1973. – 496 с.
20. Флеров А. Г., Тимофеев В. Т. Доплеровские устройства и системы навигации – М.:
Транспорт, 1987. – 191 с.
21. Шебшаевич В. С., Астафьев Г. П., Юрков Ю. А. Радионавигационные устройства и
системы – М.: Советское радио, 1958. – 863 с.
22. Сетевые
спутниковые
радионавигационные
системы
/
Шебшаевич
Дмитриев П.П., Иванцевич Н. В. и др. – М.: Радио и связь, 1982. – 272 с.
В. С.,
279
Редактор и корректор Т.В. Собко
Технический редактор Е.А Балясникова
Подписано к печати 24.09.2018. Формат бумаги 60x90 1/16.
Тираж 200. Уч.-изд. л. 17.5. Усл.-печ. л. 17,75. Заказ 484. С 56.
СПбГУ ГА. 196210. С.-Петербург, ул. Пилотов, дом 38.
280