АСР с дополнительным импульсом по
производной из промежуточной точки
Такие системы обычно применяют при автоматизации объектов, в которых
регулируемый технологический параметр (например, температура или состав)
распределен по пространственной координате (как в аппаратах колонного или
трубчатого типа). Особенность таких объектов состоит в том, что основной
регулируемой координатой является технологический параметр на выходе из
аппарата, возмущения распределены по длине аппарата, а регулирующее
воздействие подается на его вход. При этом одноконтурные замкнутые АСР
не обеспечивают должного качества переходных процессов вследствие
большой инерционности канала регулирования.
Подача на вход регулятора дополнительного импульса из промежуточной
точки аппарата дает опережающий сигнал, и регулятор включается в работу
прежде, чем выходная координата отклонится от заданного значения.
Д ля того чтобы обеспечить
регулирование без статической
ошибки, необходимо, чтобы в
установившихся
режимах
дополнительный
импульс
исчезал.
С
этой
целью
вспомогательную координату
пропускают через реальное дифференцирующее звено. Эффективность
введения дополнительного импульса зависит от точки его отбора. Выбор
последней определяется в каждом конкретном случае динамическими
свойствами объекта и условиями его работы. Для каждого объекта можно
выбрать оптимальное место отбора дополнительного импульса, при котором
качество регулирования оказывается наилучшим.
Рис. 1.29. Структурные схемы АСР с дополнительным импульсом по
производной из промежуточной точки:
а'— исходная схема; б — преобразованная к схеме каскадной АСР
Расчет подобных систем регулирования аналогичен расчету каскадных АСР
после соответствующих преобразований. В приведенной каскадной АСР на
рис. 1.29,6 роль внешнего регулятора играет звено с передаточной
функцией Rд-1(p), а внутреннего — последовательно соединенные регулятор и
дифференциатор, так что передаточные функции для приведенных
регуляторов соответственно равны:
На достаточно высоких
частотах,
для
которых
выполняется условие T2w>>1, слагаемым 1/T1 можно пренебречь. Тогда
формула для R1(p) примет вид:
Системы связного и несвязного
регулирования
Замкнутую систему автоматического регулирования, содержащую в себе один
вход, один выход и один контур регулирования, называют одноконтурной, или
одномерной. В ней один регулируемый объект и один простейший регулятор;
предназначена система для регулирования одного параметра. Такая система
характеризуется тем, что изменение регулируемой величины влечет за собой
появление и передачу соответствующих воздействий по всем звеньям
системы. Большая часть САР, рассмотренных ранее, относится к
категории одноконтурных.
Системы, в которых можно выделить более одного замкнутого контура
передачи воздействий, называют многоконтурными. В многоконтурную
превращается одноконтурная система при введении в нее внутренних
дополнительных связей. В ней два контура: основной, замкнутый через ГОС,
и внутренний, замкнутый через цепь КОС. Двухконтурной является также
система комбинированного регулирования одного объекта, содержащая в себе
контур регулирования по отклонению регулируемой величины и контур
регулирования по возмущению (см. рисунок 5.6, 5.7). При одной
контролируемой величине многоконтурная система может содержать один
датчик, воздействующий через один УП на несколько регулирующих
элементов, каждый из которых действует на один общий объект. К
многоконтурным относят также системы регулирования, содержащие в себе
все элементы в единственном числе, но у которых на вход, помимо основной
регулируемой величины, подается еще и вспомогательная регулируемая
величина или ошибка, и системы, у которых вместе с основным управляющим
воздействием используются дополнительные (например, интегралы или
производные от ошибки).
В последние годы автоматизируют все более сложные технологические
объекты и комплексы. При этом необходимо учитывать взаимозависимость и
взаимосвязанность группы регулируемых параметров. В этих условиях
следует использовать многосвязные САР, в отличие от односвязных САР
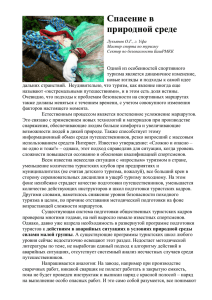
одного параметра (например, при дуговой сварке, когда нужно регулировать
одновременно напряжение на дуге и скорость сварки). Рассмотрим систему с
одновременным регулированием тока I д и напряжения дуги U д (рисунок
5.14, а). Регулирование двумя отдельными (сепаратными) регуляторами, когда
каждый из них независимо регулирует только но «своему» параметру х 1(t)
и x2 (t),
называют несвязным
системами
регулирования.
Однако
независимости регуляторов достичь трудно, ибо все они оказываются связаны
через объект, так как действие одного регулятора на состояние объекта
приводит к изменению всех его параметров и регулирование получается
невысокого качества. В рассматриваемом случае ток и напряжение дуги
связаны через источник питания. Чтобы исключить взаимовлияние
регуляторов, между ними вводят перекрестные связи — сепаратные каналы
связи, берущие начало в одной сепаратной системе и приложенные в другой
(рисунок
5.14, б).Такие
системы
называют системами
связного
регулирования (например, система кондиционирования воздуха в сварочном
цехе, которая одновременно регулирует температуру и влажность).
x 1(t), x 2(t)— регулируемые величины; y 1(t), y 2(t)— регулирующие
воздействия; Г1(t), Г2(t) — сигналы обратной связи; I д(t), U д(t)— ток и
напряжение дуги;
Рисунок 5.14 – Функциональные схемы систем несвязного (а)и связного
(б)регулирования
Многосвязные САР и одноконтурные (одномерные) можно делить по
принципу действия — на системы, работающие по отклонению регулируемой
величины и возмущению по целевому назначению — на системы
автоматической стабилизации, программного управления и следящие; по
характеру зависимостей статических ошибок регулирования от внешних
воздействий — на статические и астатические. В отличие от односвязных у
многосвязных систем может не быть такого строгого разграничения, ибо по
отношению к воздействиям они могут относиться к разным группам.
У систем связного регулирования есть специфические особенности. Каналы
связи между сепаратными регуляторами могут быть настроены так, что они
будут работать не только с одним объектом совместно, но и каждый из них в
состоянии управлять объектом самостоятельно, без помощи другого. Такое
регулирование называют связным автономным регулированием; оно более
совершенно, чем простое связное регулирование.
Взаимосвязанные системы
Регулирования
Объекты с несколькими входами и выходами, взаимно связанными между
собой, называют многосвязными объектами (рис. 1.30,а). При отсутствии
перекрестных связей, когда каждый вход влияет лишь на один выход,
многосвязные объекты распадаются на односвязные (рис. 1.30, б),
регулирование которых рассмотрено ранее. Однако подавляющее
большинство химико-технологических процессов является сложными
многосвязными объектами, а их системы регулирования оказываются
взаимосвязанными.
Рис. 1.30. Схемы объектов с несколькими входами и выходами:
а — со взаимосвязанными коодинатами; б — односвязные объекты
Динамика многосвязных объектов описывается системой дифференциальных
уравнений, а в преобразованном по Лапласу виде – матрицей передаточных
функций
(1.35)
где Wjk(p) —передаточная функция по каналу хj — yk.
Для односвязных объектов Wjk(p)=0 при j≠k, и матрица (1.35) превращается в
диагональную.
Существует два различных подхода к автоматизации многосвязных
объектов: несвязанное регулирование отдельных координат с помощью
одноконтурных
АСР; связанное
регулирование с
применением
многоконтурных систем, в которых внутренние перекрестные связи объекта
компенсируются внешними динамическими связями между отдельными
контурами регулирования.
Каждый из этих методов обладает своими преимуществами и недостатками.
При несвязанном регулировании, если учитывают только основные каналы
регулирования, расчет и наладку регуляторов проводят как для
одноконтурных АСР. Этот метод можно применять в тех случаях, когда
влияние перекрестных связей намного слабее, чем основных. При сильных
перекрестных связях фактический запас устойчивости системы регулирования
может оказаться ниже расчетного. Это приводит к низкому качеству
регулирования, а в худшем случае к – потере устойчивости вследствие
взаимного влияния контуров регулирования.
Рис. 1.31. Схема объекта с двумя взаимосвязанными координатами
Рис. 1.32. Структурная схема несвязанного регулирования объекта со
взаимосвязанными координатами
Чтобы предотвратить возможность взаимного раскачивания, одноконтурные
АСР следует рассчитывать с учетом внутренних связей и других контуров
регулирования. Это существенно усложняет расчет системы, но гарантирует
заданное качество регулирования в реальной системе.
Связанные системы регулирования включают кроме основных регуляторов
дополнительные динамические компенсаторы насчет и наладка таких систем
гораздо сложнее, чем одноконтурных АСР, что препятствует их широкому
применению в промышленных системах автоматизации.
Рассмотрим методы расчета многосвязных систем регулирования на примере
объекта с двумя входами и двумя выхода
Системы несвязанного регулирования. Структурная схема системы
представлена на рис. 1.32. Выведем передаточную функцию эквивалентного
объекта в одноконтурной АСР с регулятором R1. Как видно из рис. 1.33,а,
такой объект состоит из основного канала регулирования и связанной с ним
параллельно сложной системы, включающей второй замкнутый контур
регулирования и два перекрестных канала объекта.
Рис. 1.33. Преобразование системы регулирования двух координат к
эквивалентным одноконтурным АСР:
а – эквивалентный объект для первого регулятора; б - эквивалентный объект
для второго регулятора
Рис. 1.34. Амплитудно-частотные характеристики одноконтурных АСР при
отсутствии перекрестных связей в объекте
Передаточная функция эквивалентного объекта имеет вид:
(1.36)
Второе слагаемое в правой части уравнения (1.36) отражает влияние второго
контура регулирования на рассматриваемую систему и по существу является
корректирующей поправкой к передаточной функции прямого канала.
Аналогично для второго эквивалентного объекта (рис. 1.33,б) получим
передаточную функцию в виде
(1.37)
На основе формул (1.36) и (1.37) можно предположить, что если на какой-то
частоте модуль корректирующей поправки будет пренебрежимо мал по
сравнению с амплитудно-частотной характеристикой прямого канала,
поведение эквивалентного объекта на этой частоте будет определяться
прямым каналом.
Наиболее важно значение поправки на рабочей частоте каждого контура. В
частности, если рабочие частоты двух контуров регулирования ωp1 и
ωр2 существенно различны (например, ωP1>> ωр2, как на рис. 1.34), то можно
ожидать, что взаимное влияние их будет незначительным при условии
где
Наибольшую опасность представляет случай, когда инерционность прямых и
перекрестных
каналов
приблизительно
одинакова.
Пусть,
например, W11(p) = W12 (p)
= W21(p) =
= W22(p)
= W(p). Тогда
для
эквивалентных объектов при условии, что R1(p)=R2(p)=R(p), получим:
передаточные функции
частотные характеристики
На границе устойчивости, согласно критерию Найквиста, получим:
откуда
Так, настройка П-регулятора, при которой система находится на границе
устойчивости, вдвое меньше, чем в одноконтурной АСР.
Для качественной оценки взаимного влияния контуров регулирования
используют комплексный коэффициент связанности
который обычно вычисляют на нулевой частоте (т. е. в установившихся
режимах) и на рабочих частотах регуляторов ωp1 и ωp2. В частности, при ω = 0
значение Ксв определяется отношением коэффициентов усиления по
перекрестным и основным каналам:
Если на этих частотах Ксв≈0, объект можно рассматривать как односвязный;
при Ксв > 1 целесообразно поменять местами прямые и перекрестные каналы
(«перекрестное» регулирование); при 0< Ксв <1 расчет одноконтурных АСР
необходимо вести по передаточным функциям эквивалентных объектов (1.36)
и (1.37).
Системы связанного регулирования. Автономные АСР. Основой
построения
систем
связанного
регулирования
является принцип
автономности. Применительно к объекту с двумя входами и выходами
понятие автономности означает взаимную независимость выходных
координат у1 и y2 при работе двух замкнутых систем регулирования.
По существу, условие автономности складывается из двух условий
инвариантности: инвариантности первого выхода у1 по отношению к сигналу
второго регулятора xp2 и инвариантности второго выхода y2 по отношению к
сигналу первого регулятора xp1:
При этом сигнал xp1 можно рассматривать как возмущение для y2, а
сигнал xp2 — как возмущение для у1. Тогда перекрестные каналы играют роль
каналов возмущения (рис. 1.35). Для компенсации этих возмущений в систему
регулирования вводят динамические устройства с передаточными
функциями R12(р)
и R21(p), сигналы
от
которых
поступают
на
соответствующие каналы регулирования или на входы регуляторов.
По
аналогии
с
инвариантными
АСР
передаточные
функции
компенсаторов R12(р) и R21(p), определяемые из условия автономности, будут
зависеть от передаточных функций прямых и перекрестных каналов объекта и
в соответствии с выражениями (1.20) и (1.20,а) будут равны:
(1.38)
(1.38а)
Так же, как в инвариантных АСР, для построения автоном ных систем
регулирования важную рольиграет физическая реализуемость и техническая
реализация приближенной автономности.
Условие приближенной автономности записывается для реальных
компенсаторов с учетом рабочих частот соответствую щих регуляторов:
Рис. 1.35. Структурные схемы автономных АСР:
а — компенсации воздействия от второго регулятора в первом контуре
регулирования; б — компенсации воздействия от первого регулятора во
втором контуре регулирования; в — автономной системы регулирования двух
координат
В химической технологии одним из самых сложных многосвязных объектов
является процесс ректификации. Даже в простейших случаях – при разделении
бинарных смесей – в ректификационной колонне можно выделить несколько
взаимосвязанных координат (рис. 1.36). Например, для регулирования
процесса в нижней части колонны необходима стабилизация минимум двух
технологических параметров, характеризующих материальный баланс по
жидкой фазе и по одному из компонентов. Для этой цели обычно выбирают
уровень жидкости в кубе и температуру под первой тарелкой, а в качестве
регулирующих входных сигналов – расход, греющего пара и отбор кубового
продукта. Однако каждое из регулирующих воздействий влияет на оба
выхода: при изменении расхода греющего пара изменяется интенсивность
испарения кубового продукта, а вследствие этого – уровень жидкости и состав
пара. Аналогично изменение отбора кубового продукта влияет не только на
уровень в кубе, но и на флегмовое число, что приводит к изменению состава
пара в нижней части колонны.
Рис. 1.36. Пример системы регулирования объекта с несколькими
входами и выходами:
1. – ректификационная колонна; 2– кипятильник; 3 – дефлегматор; 4 –
флегмовая емкость; 5 – регулятор температуры; 6, 9 – регуляторы
уровня; 7 – регулятор расхода; 8 –регулятор давления.
Для регулирования процесса в верхней части в качестве выходных координат
можно выбрать давление и температуру пара, а в качестве регулирующих
входных параметров – подачу хладоагента в дефлегматор и флегмы на
орошение колонны. Очевидно, обе входные координаты влияют на давление и
температуру в колонне в ходе тепловых и массообменных процессов.
Наконец, рассматривая систему регулирования температуры одновременно в
верхней и нижней частях колонны подачей соответственно флегмы и
греющего пара, также получим систему несвязанного регулирования объекта
с внутренними перекрестными связями.
Расчет настроек регуляторов
в многоконтурных АСР
Удовлетворительное качество регулирования в простейшей одноконтурной
системе с использованием стандартных законов регулирования можно
обеспечить лишь при благоприятных динамических характеристиках объекта.
Однако большинству промышленных объектов химической технологии
свойственны значительное чистое запаздывание и большие постоянные
времени. В таких случаях даже при оптимальных настройках регуляторов
одноконтурные АСР характеризуются большими динамическими ошибками,
низкой частотой регулирования и длительными переходными процессами.
Для повышения качества регулирования необходим переход от
одноконтурных АСР к более сложным системам, использующим
дополнительные (корректирующие) импульсы по возмущениям или
вспомогательным выходным координатам. Такие системы кроме обычного
стандартного регулятора содержат вспомогательные регулирующие
устройства — динамические компенсаторы или дополнительные регуляторы.
Рис. 1.7. Пример комбинированной системы регулирования концентрации
упаренного раствора: 1 — регулятор состава; 2 —динамический компенсатор.
В зависимости от характера корректирующего импульса различают
следующие многоконтурные АСР: комбинированные, сочетающие обычный
замкнутый контур регулирования с дополнительным каналом воздействия, по
которому через динамический компенсатор вводится импульс по
возмущению; каскадные — двухконтурные замкнутые АСР, построенные на
базе двух стандартных регуляторов и использующие для регулирования кроме
основной выходной координаты дополнительный промежуточный выход; с
дополнительным импульсом по производной от промежуточной выходной
координаты.
1.3.1. Комбинированные аср
Комбинированные системы регулирования применяют при автоматизации
объектов, подверженных действию существенных контролируемых
возмущений.
На рис. 1.7 приведен фрагмент функциональной схемы автоматизации
выпарной установки, в которой одним из наиболее сильных возмущений
является расход питания. Основная задача регулирования — стабилизация
концентрации упаренного раствора за счет изменения расхода греющего пара
— выполняется регулятором 1. Кроме сигнала регулятора, на клапан,
регулирующий подачу пара, через динамический компенсатор 2 поступает
корректирующий импульс по расходу питания.
Рис. 1.8. Пример комбинированной системы регулирования состава
дистиллята: 1 — подогреватель исходной смеси; 2 — ректификационная
колонна; 3 — дефлегматор; 4 — флегмовая емкость; 5 — регулятор
состава; 6 — динамический компенсатор
На рис.1.8 приведен пример комбинированной АСР состава дистиллята в..
ректификационной
колонне.
Стабилизация
состава
дистиллята
обеспечивается регулятором 5 путем изменения подачи флегмы на орошение
колонны. Для повышения качества регулирования в системе предусмотрена
автоматическая коррекция задания регулятору 5 в зависимости от одного из
основных возмущений в процессе – расхода разделяемой смеси.
Корректирующий импульс на задание регулятору поступает через
динамический компенсатор 6.
Рассмотренные примеры иллюстрируют два способа построения
комбинированных АСР. Как видно из структурных схем (рис. 1.9 и 1.10), обе
системы регулирования обладают общими особенностями: наличием двух
каналов воздействия на выходную координату объекта и использованием двух
контуров регулирования — замкнутого (через регулятор 1) и разомкнутого
(через компенсатор 2). Отличие состоит лишь в том, что во втором случае
корректирующий импульс от компенсатора поступает не на вход объекта, а на
вход регулятора.
Введение корректирующего импульса по наиболее сильному возмущению
позволяет существенно снизить динамическую ошибку регулирования при
условии правильного выбора и расчета динамического устройства,
формирующего закон изменения этого воздействия.
Основой
расчета
подобных
систем
является принцип
инвариантности: отклонение выходной координаты системы от заданного
значения должно быть тождественно равным нулю при любых задающих или
возмущающих воздействиях.
Рис. 1.9. Структурные схемы комбинированной АСР при подключении
выхода
компенсатора на вход объекта: а — исходная схема; б — преобразованная
схема; 1 — регулятор; 2— компенсатор.
Рис. 1.10. Структурные схемы комбинированной АСР при подключении
выхода компенсатора на вход регулятора: а — исходная схема; б
— преобразованная схема; 1 — регулятор; 2 — компенсатор.
Для выполнения принципа инвариантности необходимы два условия:
идеальная компенсация всех возмущающих воздействий и идеальное
воспроизведение сигнала задания. Очевидно, что достижение абсолютной
инвариантности в реальных системах регулирования практически
невозможно. Обычно ограничиваются частичной инвариантностью по
отношению к наиболее опасным возмущениям. Рассмотрим условие
инвариантности разомкнутой и комбинированной систем регулирования по
отношению к одному возмущающему воздействию.
Условие
инвариантности
разомкнутой
и
комбинированной
АСР. Рассмотрим условие инвариантности разомкнутой системы (рис.
1.11): у(t)=0.
Рис. 1.11. Структурная схема разомкнутой АСР.
Переходя
к
изображениям
по
Лапласу ХВ(р) и Y(p) сигналов xB(t) и y(t), перепишем это условие с учетом
передаточных функций объекта по
регулирования Wp(p) и компенсатора RK(p):
каналам
возмущения WB(p) и
Y (р) = XB(p)[WB(p) + Rк(р)Wр(р)] ≡ 0 (1.19)
При наличии возмущения [ХВ(р) ≠ 0] условие
выполняется, если
инвариантности
(1.19)
WВ(p) + R(p)Wр(p)=0 (1.19а)
откуда
RK(p) = -WB(p)/Wp(p) (1.20)
Таким образом, для обеспечения инвариантности системы регулирования по
отношению к какому-либо возмущению необходимо установить
динамический компенсатор, передаточная функция которого равна
отношению передаточных функций объекта по каналам возмущения и
регулирования, взятому с обратным знаком.
Выведем условия инвариантности для комбинированных АСР. Для случая,
когда сигнал от компенсатора подается на вход объекта (см. рис. 1.9а),
структурная
схема
комбинированной
АСР
преобразуется
к
последовательному соединению разомкнутой системы и замкнутого контура
(см. рис. 1.9б), передаточные функции которых соответственно равны:
Wрс(1)(p) = WB(p) + RK(р)Wр(p), (1.21)
(1.22)
При этом условие инвариантности (1.19) записывается в виде
Y(p) = XB(p)Wpc(1)(p)Wзс(p) = 0. (1.23)
Если ХВ(р) ≠ 0 и Wзс(р) ≠ 0, должно выполняться условие
Wpc(1) (р) = Wв (Р) + Rк (р) Wp (р) = 0,
т. е. условие инвариантности (1.19а).
При использовании комбинированной системы регулирования (см. рис.
1.10 а) вывод условий инвариантности приводит к соотношениям (см. рис.
1.10 6):
Wpc2(p) = WB(p) + RK(p)R(p)Wp(p), (1.21а)
(1.23a)
Если ХВ(р)≠0 и Wзс(р)≠0 , должно выполняться условие
,
откуда
(1.20а)
Таким образом, при подключении выхода компенсатора на вход регулятора
передаточная
функция
компенсатора,
полученная
из
условия
инвариантности, будет зависеть от характеристик не только объекта, но и
регулятора.
Условия физической реализуемости инвариантных АСР. Одной из основных
проблем, возникающих при построении инвариантных систем регулирования,
является их физическая реализуемость, т. е. реализуемость компенсатора,
отвечающего условиям (1.20) или (1.20 а).
В отличие от обычных промышленных регуляторов, структура которых задана
и требуется лишь рассчитать их настройки, структура динамического
компенсатора полностью определяется соотношением динамических
характеристик объекта по каналам возмущения и регулирования и может
оказаться очень сложной, а при неблагоприятном соотношении этих
характеристик – физически нереализуемой.
«Идеальные» компенсаторы физически нереализуемы в следующих двух
случаях.
1. Если время чистого запаздывания по каналу регулирования больше, чем по
каналу возмущения. В этом случае идеальный компенсатор должен содержать
звено упреждения, так как если
,
то с учетом (1.10)
При τр>τв, τк = τв - τр <0.
2. Если в передаточной функции компенсатора степень полинома в числителе
больше, чем степень полинома в знаменателе. В этом случае компенсатор
должен содержать идеальные дифференцирующие звенья. Такой результат
получается при определенном соотношении порядков дифференциальных
уравнений, описывающих каналы возмущения и регулирования. Пусть
WB(p) = BВ(p)/[AВ(p)] и
Wр(р) = Bр(р)/[Ар(р)],
где ВВ(р),
АВ(р),
ВР{р),
степеней тв, nВ, mР и nР соответственно.
АР(р) —полиномы
Тогда
и
mK = mB + nР; nK = nB+ mР.
Таким образом, условие физической реализуемости инвариантной АСР
заключается в том, чтобы выполнялись соотношения
τв>τр и mB+ nР<nB + mР. (1.24)
Рис. 1.12. Принципиальная схема химического реактора с перемешивающим
устройством: 1 — измеритель температуры; 2 — регулирующий клапан; 3 —
измеритель расхода.
Пример. Рассмотрим систему регулирования температуры в химическом
реакторе с перемешивающим устройством, в котором протекает
экзотермическая реакция (рис. 1.12). Пусть основной канал возмущения —
«расход реакционной смеси — температура в реакторе» — аппроксимируется
двумя апериодическими звеньями первого порядка, а канал регулирования —
«расход хладоагента — температура в реакторе» — тремя апериодическими
звеньями первого порядка:
,
где T1, Т2, Тз — наибольшие постоянные времени основных тепловых
емкостей реактора, термометра и охлаждающей рубашки.
Для построения инвариантной системы регулирования необходимо ввести
компенсатор с передаточной функцией
,
который физически нереализуем, так как в данном случае нарушается условие
(1.24), и компенсатор должен содержать идеальное дифференцирующее звено.
Техническая реализация инвариантных АСР. При практической
реализации разомкнутых и комбинированных АСР обычно добиваются
приближенной инвариантности системы по отношению к рассматриваемому
возмущению в наиболее опасном диапазоне частот. При этом реальный
компенсатор выбирают из числа наиболее легко реализуемых динамических
звеньев, параметры которых рассчитывают из условия близости частотных
характеристик идеального [RK(iω)] и реального
диапазоне частот:
компенсаторов в этом
при ωН≤ω≤ωВ. (1.25)
При такой постановке задачи условие приближенной инвариантности примет
вид
, (1.26)
причем в разомкнутой АСР
, (1.27)
а в комбинированной системе регулирования
. (1.28)
Как видно из (1.17), диапазон [ωн, ωв] в разомкнутой АСР определяется
частотным спектром сигнала возмущения |XB(iω)|. В химико-технологических
процессах сигналы, как правило, являются низкочастотными, и их мощность,
в основном, сосредоточена в диапазоне [0, ωв], т. е. (рис. 1.13).
.
Рис. 1.13. Частотный спектр сигнала возмущения
Комбинированную АСР можно рассматривать как двухступенчатый фильтр
для сигнала возмущения, состоящий из разомкнутой АСР и замкнутого
контура, который является фильтром для определенных частот. Характерной
особенностью замкнутой системы регулирования является наличие пика на
амплитудно-частотной характеристике на рабочей частоте ωр (рис.1.14), в
окрестности которой он обладает наихудшими фильтрующими свойствами.
Поэтому чаще всего условие приближенной инвариантности (1.25) для
комбинированных АСР записывается для двух частот: ω = 0 и ω = ωp. При этом
компенсация возмущения на нулевой частоте обеспечивает инвариантность
системы в установившихся режимах, если Азс(ω)≠0 при ω = 0 (например, при
использовании П-регулятора в замкнутом контуре), или если
при
ω = 0 (например, при ступенчатых возмущениях).
Рис. 1.14. Амплитудно-частотные характеристики замкнутой системы с
пропорциональным (а) и пропорционально-интегральным регулятором (б)
На рис. 1.15 и 1.16 качественно показаны спектры ошибки регулирования в
одноконтурной АСР с пропорциональным регулятором (рис.1.15) и в частично
инвариантной комбинированной АСР (рис. 1.16).
Выбор структуры реального компенсатора диктуется частотными
характеристиками идеального компенсатора в диапазоне частот [0, ω р].
Обычно компенсаторы выбирают как комбинацию простейших линейных
звеньев: апериодического первого порядка и реального дифференцирующего.
В табл. 1.1 приведены динамические
распространенных типов компенсаторов.
характеристики
наиболее
Таким образом, расчет комбинированной частично инвариантной АСР
включает следующие этапы:
1) расчет настроек регулятора и определение
одноконтурной системе регулирования;
рабочей
частоты
в
2) вывод передаточной функции идеального компенсатора из условия
инвариантности и анализ его реализуемости;
3) выбор реального компенсатора и определение его параметров из условия
приближенной инвариантности в наиболее существенном для системы
диапазоне частот.
Рассмотрим примеры расчета комбинированных систем регулирования.
Рис. 1.15. Амплитудно-частотная характеристика (а) и спектр выходного
сигнала (б) в одноконтурной системе регулирования с П-регулятором
Рис. 1.16. Амплитудно-частотные характеристики (а) и спектр выходного
сигнала (б) в комбинированной системе регулирования с П-регулятором
Таблица 1.1. Динамические характеристики типовых компенсаторов
Тип и динамические характеристики
График W(iω)
компенсатора
Апериодическое звено 1-го порядка
Реальное дифференцирующее звено
Интегро-дифференцирующее звено
Неминимально-фазовое звено
Пример 1. Динамические характеристики объекта по каналам возмущения и
регулирования описываются передаточными функциями
. (1.29)
В комбинированной АСР используется П-регулятор с передаточной
функцией R(р)= — S1. Требуется рассчитать настройки регулятора, выбрать
компенсатор и определить его параметры из условия инвариантности на
нулевой и рабочей частотах.
Решение. Определяем настройки регулятора по методу Циглера-Никольса. Из
системы уравнений
где
,
определяем критическую частоту ωкр и критический коэффициент усиления
регулятора S1кр, при которых замкнутая система регулирования будет
находиться на границе устойчивости:
ωкр =1,54; S1кр = 1,835.
Рис. 1.17. Частотные характеристики компенсаторов (к примеру 1): а
— реальный компенсатор — апериодическое звено 1-го порядка; б —
реальный компенсатор — интегро-днфференцирующее звено.
Рабочую частоту ωр принимаем приближенно равной ωкр, а оптимальную
настройку регулятора равной S1* = 0,5 S1КР = 0,917.
Передаточная функция компенсатора из условия инвариантности (1.20) с
учетом (1.19) имеет вид:
. (1.30)
Так как компенсатор с передаточной функцией (1.30) не содержит звеньев с
отрицательным чистым запаздыванием и степень полинома числителя не
превосходит степени полинома знаменателя, идеальный компенсатор
физически реализуем. Однако техническая реализация такого устройства
достаточно сложна, поскольку оно включает звенья чистого запаздывания,
реальное дифференцирующее и апериодическое звено 1-го порядка. Поэтому
целесообразно подобрать реальный компенсатор более простой структуры.
Для выбора типа реального компенсатора построим частотные
характеристики идеального компенсатора в диапазоне частот [0, ωр]. Из
уравнения (1.30) при р=iω получим:
амплитудно-частотная характеристика
;
Рис. 1.18. Частотные характеристики компенсаторов (к примеру 2)
фазо-частотная характеристика
.
При ω = 0 и ω =1,54
Ак(0) = 0,5; φк(0) = 0;
Ак(1,54) = 0,48; φк (1,54) = -0,197.
Так как в интервале ω [0; 1,54] годограф Rк(iω) проходит в четвертом
квадранте, в качестве реального компенсатора можно выбрать апериодическое
звено 1-го порядка или интегро-дифференцирующее звено. В первом случае
(рис. 1.17а) система уравнений (см. табл. 1.1)
не имеет точного решения. Если принять приближенно T = 0,145, то φк(1,54) =
-0,219 и Ак(1,54) = 0,49.
Для
интегро-дифференцирующего
звена
параметры Т1 и Т2 находим из системы уравнений
(рис.
Получаем Т1 = 0,066; T2 = 0,2.
Пример 2. Передаточные функции объекта и регулятора имеют вид:
1.17б)
Расчет
комбинированной
системы
регулирования,
аналогичный
рассмотренному в примере 1, приводит к следующим результатам.
Оптимальные настройки регулятора и рабочая частота равны соответственно
S1* = l,09; S0* = 0,42; ωp = 2,02.
Идеальный компенсатор – звено чистого запаздывания, так как
.
Рабочая частота на годографе Rк(iω) находится в четвертом квадранте
[φк(2,02)= -0,81], поэтому в качестве реального компенсатора выбираем
устройство с передаточной функцией вида (см. табл. 1.1)
.
Параметры kк и Т находим из условий
kк =0,5; -2 arctg 2,02Т = -0,81.
Отсюда Т = 0,21. Частотные характеристики «идеального» и реального
компенсаторов показаны на рис. 1.18.