Экзаменационный билет № 27
1.
Анализ
качества
процессов
управления
с
помощью
метода
гармонической линеаризации.
Метод гармонической линеаризации – это метод исследования
автоколебаний. Он позволяет определить условия существования и
параметры возможных в нелинейных системах автоколебаний.
Автоколебания определяют предельные циклы в фазовом пространстве
системы, которые разделяют его на области затухающий и расходящихся
процессов. Поэтому знание параметров автоколебаний позволяет
представить картину всех возможных процессов в системе и, в частности,
определить условия устойчивости.
Метод гармонической линеаризации основан на предположении, что
колебания на входе нелинейного звена являются синусоидальными, т.е. что
𝑋 = 𝐴𝑠𝑖𝑛(𝜔𝑎 𝑡).
Wнэ ( A, , p )
b
c
A
A
Гармонический сигнал, проходя через
нелинейный элемент, домножается на
некоторое операторное выражение, которое
естественным образом называется
эквивалентной операторной функцией НЭ:
q ( A, )
p q( A, )
p.
На выходе НЭ имеем реакцию Y(t) - периодическую полигармоническую
функцию, которая раскладывается в ряд Фурье:
2
1
F ( A sin )d
Y (t ) y 20 Bk sin k C k cosk ,где y20
2 0
k 1
k 1
Bk
Ck
1
1
2
F ( A sin ) sin k
d ,
0
2
F ( A sin ) cosk d .
0
Метод гармонической линеаризации может быть применен для
приближенной оценки качества переходных процессов в нелинейных
системах. Для приближенной оценки влияния нелинейностей можно
воспользоваться идеей гармонической линеаризации. Нелинейное звено
заменяется гармонически линеаризованным эвеном и принимается, что его
передаточная функция остается справедливой в случае произвольной формы
входного сигнала X с заменой А на X. Выразив таким образом параметры
передаточной функции через входной сигнал и определив затем, как зависит
качество переходных процессов в линейной системе от значений зтих параметров, можно качественно определить, как повлияет нелинейность эвена на
переходные процессы. Например, в случае звена с насыщением такой подход
сводится к замене его эквивалентным звеном, коэффициент передачи
которого уменьшается с ростом входного сигнала так же, как гармонический
коэффициент передачи этого звена уменьшается с увеличением амплитуды
входных колебаний.
Чтобы оценить качество процессов в подобным образом гармонически
линеаризованной системе, можно применять показатель колебательности М
и полосу пропускания как показатель быстродействия. В отличие, однако, от
линейных систем здесь вместо одной частотной характеристики получится
серия таких характеристик, как функция амплитуды А. Соответственно и
качество переходных процессов будет зависеть от величины отклонения от
установившегося режима.
Также оценить качество переходных процессов можно по степени
устойчивости. Сущность метода заключается в оценке длительности
переходных процессов путем введения понятия степени устойчивости η.
Гармоническая линеаризация осуществляется для сигнала на входе
нелинейного элемента в виде:
𝑋(𝑡) = 𝑋0 (𝑡) + 𝐴0 𝑒 −𝜂𝑡 sin(𝜔𝑡)
Коэффициенты гармонически линеаризованного уравнения нелинейного
звена получают в виде функции неизвестных параметров 𝑋0 , 𝐴0 ,ω, η.
Результатом исследования является нахождение этих параметров, включая и
величину степени устойчивости η, определяющей время переходного
процесса:
3
𝑡п ≤ .
𝜂
При синтезе САУ таким же образом может быть найдена зависимость η от
варьируемых параметров системы, например, путем построения линий,
постоянных значений η в плоскости этих параметров.
Методика здесь та же, что и для определения степени устойчивости
линейных САУ, с той только разницей, что применяется она к
предварительно гармонически линеаризованной системе.
2. Дано характеристическое уравнение
A p 1 pT1 1 pT2 1 pT3 k 0 ,
где T1 , T2 , T3
заданные постоянные времени; k
общий коэффициент
усиления. Определить значения T1 , при которых система устойчива.
Параметры системы имеют следующие значения: k 1,2 , T2 13 ,5 с ,
T3 0 ,5 с .
Характеристическое уравнение имеет вид:
𝐴(𝑝) = (1 + 𝑝𝑇1 )(1 + 𝑝𝑇2 )(1 + 𝑝𝑇3 ) + 𝑘=0
Раскроем скобки:
𝑇1 𝑇2 𝑇3 𝑝3 + (𝑇1 𝑇2 + 𝑇1 𝑇3 + 𝑇2 𝑇3 )𝑝2 + (𝑇1 + 𝑇2 + 𝑇3 )𝑝 + 1 + 𝑘 = 0
Составим матрицу Гурвица:
𝑇1 𝑇2 + 𝑇1 𝑇3 + 𝑇 2 𝑇3
1+𝑘
0
(𝑇1 + 𝑇2 + 𝑇3 )
(
𝑇1 𝑇2 𝑇3
0 )
0
𝑇1 𝑇2 + 𝑇1 𝑇3 + 𝑇 2 𝑇3 1 + 𝑘
Согласно критерию Гурвица, чтобы система была устойчива, необходимо,
чтобы все главные миноры матрицы были положительные, т.е.:
𝑇1 𝑇2 + 𝑇1 𝑇3 + 𝑇2 𝑇3 > 0
𝑇 𝑇 + 𝑇1 𝑇3 + 𝑇2 𝑇3
1+𝑘
| 1 2
|>0
(𝑇1 + 𝑇2 + 𝑇3 )
𝑇1 𝑇2 𝑇3
1 неравенство выполняется, т.к. 𝑇1 , 𝑇2 , 𝑇3 ≥ 0.
Решим 2-е:
(𝑇1 𝑇2 + 𝑇1 𝑇3 + 𝑇2 𝑇3 )(𝑇1 + 𝑇2 + 𝑇3 ) − (1 + 𝑘)𝑇1 𝑇2 𝑇3 > 0
(𝑇1 𝑇2 + 𝑇1 𝑇3 + 𝑇2 𝑇3 )(𝑇1 + 𝑇2 + 𝑇3 ) > (1 + 𝑘)𝑇1 𝑇2 𝑇3
Поделим на 𝑇1 𝑇2 𝑇3 :
𝑇1 𝑇2
𝑇1
𝑇3
𝑇2 𝑇3
+ +1+ +1+ +1+ + >1+𝑘
𝑇3 𝑇3
𝑇2
𝑇2
𝑇1 𝑇1
Преобразуя, имеем:
𝑇1 𝑇2 𝑇1 𝑇3 𝑇2 𝑇3
2+ + + + + + >𝑘
𝑇3 𝑇3 𝑇2 𝑇2 𝑇1 𝑇1
𝑇2 𝑇3
𝑇2 + 𝑇3
1
2 + + + 𝑇1 (
) + (𝑇2 + 𝑇3 ) > 𝑘
𝑇3 𝑇2
𝑇2 𝑇3
𝑇1
Умножим обе части на 𝑇1 :
𝑇2 + 𝑇3
𝑇2 𝑇3
𝑇12 (
) + 𝑇1 (2 + + − 𝑘) + (𝑇2 + 𝑇3 ) > 0
𝑇2 𝑇3
𝑇3 𝑇2
Подставим известные значения:
2,07𝑇12 + 27,84𝑇1 + 14 > 0
Решим неравенство:
2,07𝑇12 + 27,84𝑇1 + 14 = 0
Найдем корни:
𝑇11 = −0,5
𝑇12 =-13
То есть T1 < −13иT1 > −0.5
С учетом того, что T1 должнобытьположительным, считаем, что при
любом T1 ≥ 0системабудетустойчива.
Экзаменационный билет № 28
1. Основные понятия импульсных систем автоматического управления.
Импульсной системой называется такая САУ, которая содержит
импульсное звено, преобразующее непрерывное входное воздействие в
равноотстоящие друг от друга по времени импульсы.
Функциональная схема импульсной системы:
Где ИП - импульсный преобразователь, НЧ - непрерывная часть.
Математическая модель импульсного преобразователя это ключ с
интервалом замыкания T=const. или T=var и временем замыкания t3→0.
Такой ключ называют "идеальным импульсным элементом" (ИИЭ)
Импульсные элементы, выполняющие в системах управления
дискретизацию аналоговых сигналов и модуляцию, характеризуются
параметрами:
Характеристика импульсного элемента
- зависимость величины
модулируемого параметра импульсов от соответствующих дискретных
значений входной величины. Может быть как линейной, так и нелинейной
(например, логарифмической), а также комбинированной.
Коэффициент усиления kи импульсного элемента - отношение величины
модулируемого параметра импульсов к величине входного сигнала х вх(t) в
соответствующий дискретный момент времени. Например, коэффициент
усиления амплитудного импульсного элемента kи = А/xвх, где А амплитуда импульса, хвх - соответствующее дискретное значение входной
величины.
Период повторения импульсов Т или частота повторения импульсов
0 = 2/Т.
Длительность импульсов =Т, где - скважность импульсов,
показывающая, какую часть периода повторения импульсов занимает
длительность импульса.
Форма импульса S(t) может быть прямоугольной, треугольной,
синусоидальной, экспоненциальной, и пр.
В импульсных системах параметры импульсов (амплитуда,
длительность или время появления) определяются входной информацией.
Исходя из изменяемого информационного параметра импульсов системы
различают с амплитудно-импульсной (АИМ), широтно-импульсной (ШИМ)
и фазоимпульсной (ФИМ) модуляцией.
1) Модуляция с изменением амплитуды импульса (АИМ) (см. Рис.8В.)
При этом виде модуляции выходной сигнал имеет форму
прямоугольного импульса с постоянными временными параметрами, но
измененного по амплитуде, в зависимости от значения входного сигнала:
В силу такой характеристики коэффициента усиления (коэффициента
крутизны) модулятора ки, амплитудно-импульсную модуляцию (АИМ)
называют линейной. Чаще всего ки =1.
2) Модуляция с изменением ширины импульса (ШИМ) (см. Рис. 9В.)
ХИ),
tи
t
Т
T
и
- коэффициент усиления импульса ( x(t ) x[nT ] x[nT ] xmax
tи
- относительная продолжительность импульса.
T
Преобразование информации с помощью ШИМ является нелинейным.
На графике видно, что ШИМ обладает статической четно - симметричной
нелинейностью, если использовать однополярные импульсы. В реальных
импульсных устройствах с ШИМ, кроме статической, присутствует еще и
динамическая нелинейность.
3) Фазоимпульсная модуляция (время импульсная
модуляция) (ФИМ, ВИМ). Здесь меняется только фаза
импульса (см. Рис. 11. В). Коэффициент крутизны таких
модуляторов вычисляется по формуле:
x
.
Импульсные системы описываются решетчатыми функциями.
Решетчатая функция - квантованный сигнал на выходе идеального
импульсного элемента (ИИЭ), представляющий собой последовательность
импульсов, площадь которых равна амплитуде входного сигнала квантователя
в дискретные моменты времени.
x(t) – непрерывная функция
x[nT] – решётчатая функция,
существует только в моменты
времени t=nT.
В эти моменты значения исходной
функции
и
решётчатой,
полученной
из
первой
квантованием
по
времени,
совпадают: x[nT]= x(t) при t=nT.
2. Дано характеристическое уравнение
A p 1 pT1 1 pT2 k 0,
в котором два параметра постоянная времени T1 и коэффициент усиления k могут
варьироваться. Определить влияние изменения указанных параметров на устойчивость
системы. Параметры системы имеют следующие значения: T2 7 ,2 с .
Характеристическое уравнение имеет вид:
𝐴(𝑝) = (1 + 𝑝𝑇1 )(1 + 𝑝𝑇2 ) + 𝑘=0
Раскроем скобки:
𝐴(𝑝) = 𝑇1 𝑇2 𝑝2 + (𝑇1 + 𝑇2 )𝑝 + 1 + 𝑘 = 0
Составим матрицу Гурвица:
(𝑇 + 𝑇2 )
0
( 1
)
𝑇1 𝑇2
1+𝑘
Согласно критерию Гурвица, чтобы система была устойчива, необходимо,
чтобы все главные миноры матрицы были положительные, т.е.:
𝑇1 + 𝑇2 > 0 выполняется, т.к. T1 , 𝑇2 ≥ 0
(𝑇1 + 𝑇2 )(1 + 𝑘) > 0
Рассмотрим относительно k, т.е. (𝑇1 + 𝑇2 ) ≠ 0(оноинебудетравно0):
k>-1
Рассмотрим относительно Т:
𝑇1 > −𝑇2
С учетом того, что T1 ≥ 0, 𝑇1 > −𝑇2 будет выполнено всегда.
Таким образом, 𝑇1 не влияет на устойчивость системы, k же должно быть
больше -1, чтобы система была устойчива.
Экзаменационный билет № 29
1. Комплексный коэффициент усиления и передаточная функция
импульсной системы.
Импульсные
системы
описываются
решетчатыми
функциями.
Решетчатую функцию можно рассматривать как результат модуляции
непрерывной функции f(t) импульсной последовательностью δ(t):
Тогда решетчатую функцию можно определить выражением:
f [nT] = f(t) δ(t - nT).
А вся совокупность импульсов РФ будет описана как:
n o
n o
f (t ) f (t ) t nT f (nT ) t nT .
*
Рассмотрим передаточную функцию непрерывной системы:
𝑊(𝑝) =
𝑌(𝑝)
𝑋(𝑝)
где𝑋(𝑝), 𝑌(𝑝) − изображениявходногоивыходногосигнала, которые
можно найти с помощью преобразования Лапласа:
∞
𝑋(𝑝) = ∫ 𝑥(𝑡)𝑒 −𝑝𝑡 𝑑𝑡
−∞
Как было сказано выше 𝑥 ∗ (𝑡) = ∑∞
𝑛=0 𝑥(𝑛𝑇) ∙ 𝛿(𝑡 − 𝑛𝑇)
Тогда изображение Лапласа дискретного сигнала:
∞
∞ ∞
𝑋 ∗ (𝑝) = ∫ 𝑥 ∗ (𝑡)𝑒 −𝑝𝑡 𝑑𝑡 = ∫ ∑ 𝑥(𝑛𝑇) ∙ 𝛿(𝑡 − 𝑛𝑇) 𝑒 −𝑝𝑡 𝑑𝑡 =
−∞
∞
∞
−∞ 𝑛=0
∞
= ∑ ∫ 𝑥(𝑛𝑇) ∙ 𝛿(𝑡 − 𝑛𝑇)𝑒 −𝑝𝑡 𝑑𝑡 = ∑ 𝑥(𝑛𝑇) ∙ 𝛿(𝑡 − 𝑛𝑇)𝑒 −𝑝𝑛𝑇
𝑛=0 −∞
𝑛=0
Преобразуя таким образом входной и выходной сигналы, мы можем
получить передаточную функцию импульсной системы 𝑊 ∗ (𝑝).
Предполагая, что p=jω, мы получим комплексный коэффициент передачи
импульсной системы 𝑊 ∗ (jω), который можно изобразить:
-в декартовой системе координат: 𝑊 ∗ (jω) = 𝑅𝑒(ω) +jIm(ω)
-в полярной системе координат: 𝑊 ∗ (jω) = 𝐴(𝜔)𝑒 𝑗𝜑(𝜔)
Также для импульсных систем используется Z-преобразование:
z=𝑒 −𝑝𝑇
Тогда получаем:
Z { f [nT ]} F ( z ) f [nT ] z n .
n 0
Таким образом, передаточная функция импульсной системы будет равна:
W(z)=
𝑌(𝑧)
.
𝑋(𝑧)
2. Дано характеристическое уравнение
A p 1 pT1 1 pT2 1 pT3 k 0 ,
в котором два параметра постоянная времени T1 и коэффициент усиления
k
могут варьироваться. Определить влияние изменения указанных
параметров на устойчивость системы. Параметры системы имеют
следующие значения: T2 13 ,5 с , T3 5 ,5 с .
Характеристическое уравнение имеет вид:
𝐴(𝑝) = (1 + 𝑝𝑇1 )(1 + 𝑝𝑇2 )(1 + 𝑝𝑇3 ) + 𝑘=0
Раскроем скобки:
𝑇1 𝑇2 𝑇3 𝑝3 + (𝑇1 𝑇2 + 𝑇1 𝑇3 + 𝑇2 𝑇3 )𝑝2 + (𝑇1 + 𝑇2 + 𝑇3 )𝑝 + 1 + 𝑘 = 0
Составим матрицу Гурвица:
𝑇1 𝑇2 + 𝑇1 𝑇3 + 𝑇 2 𝑇3
1+𝑘
0
(
)
(
𝑇1 𝑇2 𝑇3
𝑇1 + 𝑇2 + 𝑇3
0 )
0
𝑇1 𝑇2 + 𝑇1 𝑇3 + 𝑇 2 𝑇3 1 + 𝑘
Согласно критерию Гурвица, чтобы система была устойчива, необходимо,
чтобы все главные миноры матрицы были положительные, т.е.:
𝑇1 𝑇2 + 𝑇1 𝑇3 + 𝑇2 𝑇3 > 0
𝑇 𝑇 + 𝑇1 𝑇3 + 𝑇2 𝑇3
1+𝑘
| 1 2
|>0
(𝑇1 + 𝑇2 + 𝑇3 )
𝑇1 𝑇2 𝑇3
1 неравенство выполняется, т.к. 𝑇1 , 𝑇2 , 𝑇3 ≥ 0.
Решим 2-е:
(𝑇1 𝑇2 + 𝑇1 𝑇3 + 𝑇2 𝑇3 )(𝑇1 + 𝑇2 + 𝑇3 ) − (1 + 𝑘)𝑇1 𝑇2 𝑇3 > 0
(𝑇1 𝑇2 + 𝑇1 𝑇3 + 𝑇2 𝑇3 )(𝑇1 + 𝑇2 + 𝑇3 ) > (1 + 𝑘)𝑇1 𝑇2 𝑇3
Поделим на 𝑇1 𝑇2 𝑇3 :
𝑇1 𝑇2
𝑇1
𝑇3
𝑇2 𝑇3
+ +1+ +1+ +1+ + >1+𝑘
𝑇3 𝑇3
𝑇2
𝑇2
𝑇1 𝑇1
Преобразуя, имеем:
𝑇1 𝑇2 𝑇1 𝑇3 𝑇2 𝑇3
2+ + + + + + >𝑘
𝑇3 𝑇3 𝑇2 𝑇2 𝑇1 𝑇1
𝑇2 𝑇3
𝑇2 + 𝑇3
1
2 + + + 𝑇1 (
) + (𝑇2 + 𝑇3 ) > 𝑘
𝑇3 𝑇2
𝑇2 𝑇3
𝑇1
То есть, чтобы система была устойчива должно выполняться:
𝑇
𝑇
𝑇 +𝑇
1
k<2 + 2 + 3 + 𝑇1 ( 2 3 ) + (𝑇2 + 𝑇3 )
𝑇3
𝑇2
или
k<4,85 + 𝑇1 0,25 +
𝑇2 𝑇3
1
𝑇1
𝑇1
19
Тогда система будет устойчива при любом 𝑇1 .
Экзаменационный билет № 30
1. Устойчивость импульсных систем управления.
Под устойчивостью линейной, в том числе и дискретной, системы обычно
понимают ее свойство (способность) возвращаться к первоначальному
состоянию после прекращения действия внешних возмущений. Как правило,
устойчивость является необходимым условием работоспособности системы
управления.
Устойчивость по А.М. Ляпунову
Пусть дискретная система (возможно, нелинейная и нестационарная)
задана уравнением в пространстве состояний
xk 1 f k , xk ,
(1.4.)
где f (k, x[k]) – некоторая вектор-функция своих аргументов. Решением этого
уравнения называется векторная последовательность xk , обращающая
(1.4.) в тождество.
T
Для любого вектора g1 , g 2 , , g N можно ввести норму: g ,
например, евклидову норму g
g12 g 22 , g N2 .
*
Тогда решение x k уравнения (1.4.) при начальных условиях
x0 x0* называется устойчивым, если для заданного ε > 0 существует
такое δ > 0 , зависящее от ε, что при всех начальных условиях, для которых
x0 x0* , имеем xk x * k при всех k 0 .
С геометрической точки зрения это означает, что все траектории,
*
которые начинаются в δ–окрестности точки x0 , отклоняются от решения
x k не более, чем на ε по выбранной норме.
*
Таким образом, для нелинейной системы устойчивость – это свойство
отдельного решения при заданных начальных условиях.
При одних начальных условиях решение уравнения (1.4.) может быть
устойчиво, а при других – неустойчиво.
*
Решение x k уравнения (1.4.) называется асимптотически
устойчивым, если оно устойчиво и существует такое число M>0, что при
x0 x0* M имеем lim xk x* k 0 .
k
Если при этом M = ∞ , говорят, что система устойчива в целом, т.е.,
при любых начальных условиях.
Для линейной дискретной системы устойчивость произвольного движения
*
системы из какой-либо начальной точки x0 определяет (гарантирует)
устойчивость системы (устойчивость в целом).
Корневой критерий устойчивости линейной дискретной системы
Линейная дискретная система может быть описана разностным
уравнением:
a0 yn a1 yn 1 ... an y0 b0 g n b1 g n 1 ... bm g n m , (2.4.)
или соответствующим уравнением в операторной форме:
a a z ... a z y( z) b b z ... b z g ( z) , (3.4.)
a z a z ... a y( z) b z b z ... b z g ( z) ,
1
0
n
1
n
n
1
0
n 1
либо
0
1
n
(3’.4.)
либо передаточной функцией:
m
n 1
n
0
m
1
1
nm
m
y( z ) b0 z n b1 z n1 ... bm z nm b0 b1 z 1 ... bm z m
Ф( z )
.
g ( z)
a0 z n a1 z n1 ... an
a0 a1 z 1 ... an z n
(3”.4.)
Решение уравнения (2.4.) состоит из двух частей:
yk yсв k yв k ,
где первая часть определяет свободное, а вторая – вынужденное движение
системы.
Для оценки устойчивости дискретной САУ, как и в случае
непрерывной системы, исследуется свободное движение. Оно может быть
найдено при решении однородного разностного уравнения (без правой части)
a0 yn a1 yn 1 ... an y0 0 .
(4.4.)
n
Решение (4.4.) ищется в виде
yсв k ci zik ,
i 0
(5.4.)
где ci - постоянные коэффициенты, а z i - корни характеристического
уравнения
a0 z n a1 z n1 ... an 0 ,
(6.4.)
(проверяется подстановкой (5.4.) в (4.4.)).
Уравнение (6.4.) можно получить и по передаточной функции
замкнутой системы Ф (z) (3”.4.), приравняв к нулю полином ее знаменателя.
Тогда говорят, что линейная дискретная система асимптотически
устойчива, если её собственное движение с течением времени затухает и
lim yсв k 0 . (7.4.)
стремится к нулю, т. е.
k
yсв k , то дискретная система называется неустойчивой.
Если lim
k
yсв k Const или не существует, то говорят, что
И, наконец, если lim
k
дискретная система находится на границе устойчивости.
Отсюда следует, что условие (7.4.) с учетом (5.4.) будет выполнено
тогда и только тогда, когда корни характеристического уравнения
располагаются внутри единичного круга на z-плоскости.
Основное условие устойчивости. Для того чтобы линейная
дискретная система была устойчива, необходимо и достаточно,
чтобы все корни ее характеристического уравнения (полюсы
системы) были по модулю меньше единицы: zi 1,
i 1, n .
2. Оценить качество САР, описываемой уравнением
1 pT1 1 pT2 1 pT3 Y p kX p ,
путём полного построения переходной функции и определения по ней времени
регулирования t р , перерегулирования , периода колебаний T и числа полуволн N
за время затухания процесса. Параметры системы имеют следующие значения:
k 1,2 , T1 0 ,8 с , T2 13 ,5 с , T3 0 ,5 с .
Передаточная функция имеет вид:
𝑊(𝑝) =
𝑘
=
(1 + 𝑝𝑇1 )(1 + 𝑝𝑇2 )(1 + 𝑝𝑇3 )
=
𝑘
=
𝑇1 𝑇2 𝑇3 𝑝3 + (𝑇1 𝑇2 + 𝑇1 𝑇3 + 𝑇2 𝑇3 )𝑝2 + (𝑇1 + 𝑇2 + 𝑇3 )𝑝 + 1
=
𝑘
5.4𝑝3 + 17.95𝑝2 + 14.8𝑝 + 1
Найдемкорниполиномазнаменателя:
5.4𝑝3 + 17.95𝑝2 + 14.8𝑝 + 1 = 0
Корни равны:
p1=-2
p2=-1.25
p3=-0.07
Для того, чтобы построить переходную характеристику, можно применить
формулу Хевисайда:
ℎ(𝑡) =
𝑅(0)
𝑄(0)
+ ∑3𝑖=1
𝑅(𝑝𝑖 )
𝑝𝑖 𝑄′ (𝑝𝑖 )
𝑒 𝑝𝑖𝑡 ,где
R(𝑝𝑖 ) − полиномчислителяпередаточнойф − иот𝑝𝑖
Q’(𝑝𝑖 ) − производнаяполиномазнаменателяпередаточнойф − иот𝑝𝑖
Рассчитав точки переходной характеристики по формуле Хевисайда:
t
0
1
2
3
4
5
10
15
20
25
30
40
50
55
56
60
70
80
90
100
h(t)
0
0,135098
0,209228
0,276779
0,339351
0,39758
0,634558
0,80154
0,91921
1,002131
1,060564
1,130758
1,165615
1,17577
1,177408
1,182925
1,191521
1,195789
1,197909
1,198962
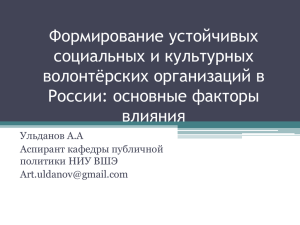
Построим переходную характеристику:
Видим, что перерегулирование в системе отсутствует.
Время регулирования t р =54 с.
Колебания отсутствуют, поэтому N=0.
Экзаменационный билет № 31
1. Критерий устойчивости Гурвица для импульсных систем.
Характеристический многочлен исследуемой импульсной системы имеет
вид:
𝐺 ∗ (𝑞) = 𝑎𝑙 𝑒 𝑙𝑞 + 𝑎𝑙−1 𝑒 (𝑙−1)𝑞 + ⋯ + 𝑎0
Произведем в характеристическом многочлене 𝐺 ∗ (𝑞) замену:
z= 𝑒 𝑞
Тогда получим:
𝐺(𝑧) = 𝑎𝑙 𝑧 𝑙 + 𝑎𝑙−1 𝑧 (𝑙−1) + ⋯ + 𝑎0 (*)
Так как такая подстановка преобразует полосу –π<Im(q)<π, Re(q)<0 во
внутренность круга единичного радиуса |z|≤1, то применительно к плоскости
необходимое
z
и
достаточное
условие
устойчивости
формируется
следующим образом: замкнутая импульсная система устойчива, если все
корни G(z) лежат внутри круга единичного радиуса.
Для того, чтобы привести условия устойчивости импульсной системы к
аналогичным условиям устойчивости Гурвица для непрерывных систем, в
многочлене (*) произведем подстановку:
𝑧−1
V=
𝑧+1
1+𝑣
или z=
1−𝑣
Тогда характеристический полином принимает вид:
𝐺(𝑣) = 𝑏𝑙 𝑣 𝑙 + 𝑏𝑙−1 𝑣 𝑙−1 + ⋯ + 𝑏0
Так как такая подстановка преобразует круг
единичного радиуса комплексной
плоскости Z в левую полуплоскость v, то
условие устойчивости импульсной системы
формулируется так: замкнутая импульсная
система устойчива, если корни G (v) лежат
в левой полуплоскости, т. е. если
выполняются условия Гурвица
bi>0, Δk>0, k= 1,2,..., l, где Δk-главные
миноры матрицы Гурвица:
𝑏𝑙−1 𝑏𝑙−3 𝑏𝑙−5 .
𝑏
𝑏𝑙−2 𝑏𝑙−4 .
( 𝑙
. . )
𝑏𝑙−1
0
. .
𝑏𝑙
0
2. Оценить качество САР, описываемой уравнением
1 pT1 1 pT2 Y p kX p ,
путём полного построения переходной функции и определения по ней
времени регулирования t р , перерегулирования , периода колебаний T и
числа полуволн N за время затухания процесса. Параметры системы
имеют следующие значения: k 1,2 , T1 1,4 с , T2 1,7 с .
Передаточная функция имеет вид:
𝑊(𝑝) =
𝑘
𝑘
1,2
=
=
(1 + 𝑝𝑇1 )(1 + 𝑝𝑇2 ) 1 + 𝑝(𝑇1 + 𝑇2 ) + 𝑇2 𝑇1 𝑝2 1 + 3.1𝑝 + 2.4𝑝2
Найдемкорниполиномазнаменателя:
1 + 3.1𝑝 + 2.4𝑝2 = 0
Корни равны:
p1=-0.71
p2=-0.59
Для того, чтобы построить переходную характеристику, можно применить
формулу Хевисайда:
ℎ(𝑡) =
𝑅(0)
𝑄(0)
+ ∑2𝑖=1
𝑅(𝑝𝑖 )
𝑝𝑖 𝑄′ (𝑝𝑖 )
𝑒 𝑝𝑖𝑡 ,где
R(𝑝𝑖 ) − полиномчислителяпередаточнойф − иот𝑝𝑖
Q’(𝑝𝑖 ) − производнаяполиномазнаменателяпередаточнойф − иот𝑝𝑖
Рассчитав точки переходной характеристики по формуле Хевисайда:
t
0
0,1
0,2
0,3
0,4
0,5
0,6
1
2
3
4
5
6
7
8
9
10
11
12
h(t)
0
0,049545
0,053379
0,061257
0,072654
0,087096
0,104155
0,191378
0,458564
0,699444
0,878521
1,000161
1,078583
1,127458
1,157209
1,175009
1,18552
1,191664
1,195226
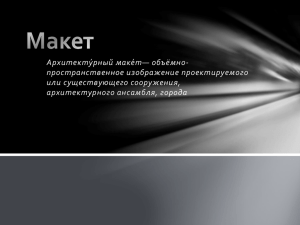
Построим переходную характеристику:
Видим, что перерегулирование в системе отсутствует.
Время регулирования t р =9,2 с.
Колебания отсутствуют, поэтому N=0.
Экзаменационный билет № 32
1. Критерий устойчивости Михайлова для импульсных систем.
Рисунок 4.2. расположение полюсов на плоскости р и годограф
Михайлова на плоскости D(p)(аналогично непрерывной системе)
Часто исходным для анализа является z характеристическое уравнение:
𝐷(𝑧) = 𝑎0 𝑧 𝑛 + ⋯ + 𝑎𝑛
Тогда для описания функции D(z) потребуется пара комплексных
плоскостей, изображенных на рисунке 4.3. Однако, учитывая связь 𝑧 = 𝑒 𝜏𝑝 ,
получим [𝐷(𝑧)]𝑧=𝑒 𝜏𝑝 = 𝐷 ∗ (𝑝).
Таким образом, функция D(z) содержит в себе информацию о функции
𝐷∗ (𝑝), в том числе и о той кривой, которая получается на плоскости 𝐷∗ (𝑝)
при изменении p вдоль контура 𝛾1− :
{[𝐷(𝑧)]𝑧=𝑒 𝜏𝑝 }𝑝→𝛾1− = [𝐷∗ (𝑝)]𝑝→𝛾1− (1)
Но
{[𝐷(𝑧)]𝑧=𝑒 𝜏𝑝 }𝑝→𝛾1− = [𝐷(𝑧)]{[𝑧=𝑒 𝜏𝑝]𝑝→𝛾1− } = [𝐷(𝑧)]𝑧=𝑧𝛾1−
где
𝑧𝛾1− =(𝑒 𝜏𝑝 )𝑝→𝛾1− (2)
Тогда соотношение (1) принимает вид:
[𝐷(𝑧)]𝑧=𝑧𝛾1− = [𝐷∗ (𝑝)]𝑝→𝛾1−
(3)
Выражение (3) означает, что на плоскости D(z) получается кривая, имеющая
форму кривой [𝐷∗ (𝑝)]𝑝→𝛾1− плоскости 𝐷∗ (𝑝),если z на плоскости z придавать
значения 𝛾1− .
Для определения 𝑧𝛾1− согласно (2), достаточно отобразить контур 𝛾1−
плоскости p на плоскость z. Точка 𝑑 (𝑝𝑑 = 0 − 𝑗
𝜔𝑟
2
)плоскости p (см. рис. 4.2,
а) отобразится в точку 𝑑 ′ (𝑧𝑑′ = 𝑒 −𝑗𝜋 )плоскости z (рис. 4.3, а). Отрезок da=A
— в окружность единичного радиуса d’a’=A’. Полупрямая ab=B— в отрезок
a’b’=B’ (так как, во-первых, на всем этом отрезке Imp=Im𝑝𝑎 = 𝑗𝜔/2 поэтому
там argz=arg𝑧𝑎′ = 𝜋, а во-вторых, Rep изменяется от 0 до -∞, поэтому |z|
изменяется от 1 до 0). Отрезок дуги bc=C отобразится в начало координат С’.
Полупрямая cd=E — в отрезок c’d’=E’ . Таким образом, весь замкнутый
контур 𝛾1− плоскости p отобразился в замкнутый контур плоскости z, т. е. в
искомый контур 𝑧𝛾1− . Изменяя z вдоль контура 𝑧𝛾1− в функции D(z), на
плоскости D(z) получим, как уже и говорилось, кривую, имеющую форму
кривой [𝐷 ∗ (𝑝)]𝑝→𝛾1− .По числу оборотов этой кривой относительно начала
координат можно судить об устойчивости в дискретные моменты времени,
кратные τ, импульсной системы. В связи с чем исследуем, как ведет себя
функция D(z) при изменении z вдоль отдельных участков контура 𝛾1− = 𝑧𝛾1− .
Когда 𝑧 = 𝑧𝑏′ = 𝑧𝑐′ = 𝑧𝐶′ = 0 + 𝑗0,то 𝐷(𝑧𝐶 ′ ) = 𝑎𝑛 (см. 4.3).
Пусть при изменении z вдоль отрезка Е’ конец вектора функции D(z) описал
некоторую кривую D(zE’) (от точки D(zc’) до точки D(zd’)). В силу того, что
точке z предстоит обойти весь контур 𝛾1− , она должна принимать значения,
соответствующие участку В’ (от точки a’ до точки b’ ), т. е. те же значения,
что и на участке Е’, но в обратном порядке. По этой причине вектор функции
D(z) своим концом должен пройти по тем же, что и на кривой D(zE’),
значениям, только в обратном порядке. Таким образом, суммарное изменение
фазы вектора D(z) при движении точки z вдоль отрезков c’d’ и a’b’ равно
нулю. Следовательно, все окончательные приращения фазы вектора D(z) (а
именно только они представляют интерес с позиции принципа аргумента)
при изменении z вдоль контура 𝛾1− происходят тогда, когда z принимает
значения на окружности единичного радиуса |z| = 1. Получающаяся в этом
случае на плоскости D(z) кривая [𝐷(𝑧)]|𝑧|=1 является z-кривой Михайлова
импульсной системы. Дело в том, что изменению z вдоль окружности
единичного радиуса соответствует изменение p вдоль мнимой оси, отчего
кривая [𝐷(𝑧)]|𝑧|=1 той же формы , что и кривая D* (jω).
В свете изложенного z-аналог критерия устойчивости Михайлова можно
сформулировать следующим образом:
Для устойчивости импульсной системы в дискретные моменты времени,
кратные τ, необходимо и достаточно, чтобы z-кривая Михайлова [𝐷(𝑧)]|𝑧|=1
(кривая D(z) на плоскости D(z), получающаяся при изменении z вдоль
окружности единичного радиуса в положительном направлении) сделала n
оборотов вокруг начала координат в положительном направлении, где n—
порядок полинома D(z).
2. Определить приближённые значения перерегулирования и времени
регулирования
по
вещественной
частотной
замкнутой системы, изображённой на рисунке
Перерегулирование можно определить по формуле:
𝜎≤
1,18𝑃𝑚𝑎𝑥 −𝑃(0)
𝑃(0)
=
Время регулирования:
𝜋
3,14
𝜏𝑝 >
=
= 39мс
𝜔П
80
1,18∙1,08−1
1
100% = 27%
характеристике
P