II. Проектирование системы
реклама

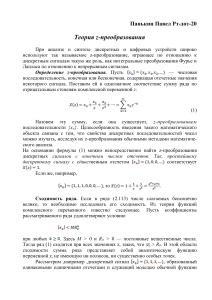
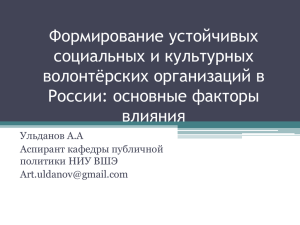
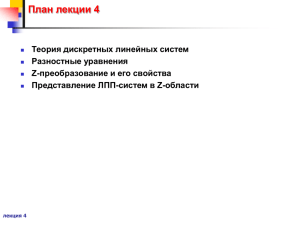
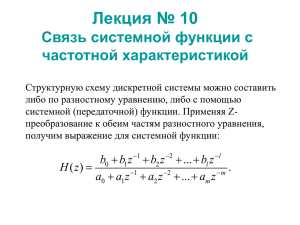
НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ЯДЕРНЫЙ УНИВЕРСИТЕТ «МИФИ» ОТЧЕТ о выполнении большого домашнего задания по теме "синтез цифрового закона управления" по курсу «ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ» выполнил студент группы А7-02 Логинов А.В. Принял преподаватель Москва, 2011г. ε g ε* ЦВУ σ σ* 1 e sT s w0 s y* y Рисунок 1. Структурная схема дискретной неприрывной системы. Шаг дискретизации по времени T. Используемые свойства z-преобразования: 1) Линейность 2) Сдвиг по времени xt kT xs e sT x( z ) z k x(t) 1t e at Таблица 1. Таблица z-преобразований. x(s) x(z) 1 s 1 sa 1 z z 1 z z e aT I. Анализ Изменяемая линейная часть задается передаточной функцией w0 s 1 0.06 s 0.3 s 1 1) Пусть на ЦВУ реализован пропорциональный закон управления t k t T s k s e sT откуда w s k e sT Беря z-преобразование от обеих частей, получаем wz k z 1 2) Получение описания системы в z-форме Линейная часть системы задается передаточной функцией экстраполятора и неизменяемой частью w0 s . w0 ý s 1 e sT w0 s s Беря z-преобразование с учетом свойств линейности и сдвига по времени: w s z 1 w0 s w0 ý z 1 z 1 0 z s s w s Чтобы найти преобразование от 0 , можно разбить эту функцию на s простейшие дроби w0 s 1 0.06 s 1 0.36 1 1.2 1 s s0.3 s 1 s 0.3 s 1 s s 0.3 z z w s 0 1.2 1 T s z 1 0.3 ze Таким образом передаточная функция разомкнутого контура: z 1 z z w p z k z 1.2 1 T z z 1 z e 0.3 1 z 1 1 1.2 1 k z z 1 T z e 0.3 Окончательная формула: 1 T 0.3 k 0.2 z 1.2 e w p z 1 T z 0.3 z e 2 3) Построение области устойчивости замкнутой системы Характеристическое уравнение 1 w p z 0 1 T 0.3 k 0.2 z 1.2 e 0 1 1 T z 0.3 z e откуда z 2 z e 1 T 0.3 1 T k 0.2 z 1.2 e 0.3 0 что можно привести к виду z 2 a1 z a 2 0 где a1 e 1 T 0.3 0.2k 1 T 0.3 a2 k 1.2 e Условия критерия устойчивости Шур-Кона для случая второго порядка: 1 a2 1 a 2 1 1 2 1 a1 a2 0 => 1 a1 a2 0 1 a a 0 1 a a 0 3 1 2 1 2 Рисунок 2. Предельные случаи устойчивости системы. Рисунок 3. Область усточивости системы как функция k(T). 3 4 II. Проектирование системы 5