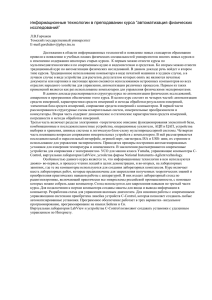
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ГЕОДЕЗИИ И КАРТОГРАФИИ Кафедра геодезии Курсовая работа по дисциплине: «Современные методы контроля и обработки измерений» На тему: «Уравнивание нивелирной сети методом наименьших квадратов рекуррентным способом» Преподаватель: Доц. Клыпин Игорь Андреевич Рисунок 1 – Схема нивелирного хода Пусть измерены десять превышений h1, h2, …, h10 (рис. 1) и надо определить высоты четырех реперов: Rp1, Rp2, Rp3, Rp4. Высоты опорных пунктов М1, М2 и М3 даны в таблице 1, а измеренные превышения и длины ходов приведены в таблице 2. Таблица 2 Результаты измерений № h(м) S(м) Таблица 1 Исходные данные Rp H(м) М41 266,895 М42 274,909 М43 265,898 Необходимо выполнить 1 -1,204 18,2 2 6,798 17,5 3 -4,914 14,8 4 -3,708 13,0 5 2,265 15,3 6 9,045 12,2 7 -5,943 19,2 8 -2,230 11,3 9 -8,180 17,7 10 8,340 11,8 уравнивание нивелирной сети в предположении, что результаты измерений могут содержать грубые ошибки, которые необходимо исключить из обработки, а часть исходных данных может быть неактуальна, и их также необходимо исключить. С этой целью выполним уравнивание рекуррентным способом. 2 При назначении обратных весов измерений в качестве единицы веса примем определение превышения по ходу длиной 1 км, что удобно, так как в таком случае обратные веса измерений будут численно равны длинам (в км) ходов, по которым эти измерения были выполнены. При этом во всех случаях будем полагать, что средняя квадратическая ошибка единицы веса (средняя квадратическая ошибка определения превышения по ходу длиной 1 км) будет равна 𝜇 = 𝑚км = 3 мм. Результаты фиктивных измерений равны отметкам самих пунктов, а 2 𝑚ид ⁄ 2 = 1, т.е. будем обратные веса этих измерений примем равными 𝜇 считать, что ошибка исходных данных 𝑚ид = 3мм. Следовательно: ℎф = 𝐻ид и 𝑞ф = 1 Обратные веса измеренных величин будут численно равны измеренным расстояниям, т.е.: 𝑞𝑖 = 𝑆км 𝑖 1. Уравнивание сети как нуль-свободной Фиксируется лишь один исходный пункт М1. Все остальные рассматриваются как определяемые. Дабы обеспечить в последующем возможность не только контроля, но и локализации грубых ошибок, все измерения разобьём на две группы. В первую будут входить только необходимые, а во вторую – только избыточные измерения. Вектор измерений в таком случае целесообразно рассматривать состоящим из двух подвекторов, один из которых будет содержать обычные измерения, а другой — фиктивные: 𝑌 𝑌 = (𝑌 ) ф Весовая матица таких измерений также будет иметь блочный вид: 𝑃=( 𝑃 3 0 𝑄ф−1 ) Матрица коэффициентов параметрических уравнений поправок в этом случае также приобретает блочный вид: 𝐴 = (𝐴 где блок 𝐴ид содержит 𝐴ид ) частные производные исходных параметрических уравнений связи по добавочным аргументам, в качестве которых выступают исходные данные, так как побочным эффектом от рассмотрения исходных данных фиктивными измерениями является то, что все эти исходные данные превращаются в дополнительные параметры: 𝜕𝑦(0) (𝐴ид )𝑖𝑗 = 𝑖 𝜕𝑦ид 𝑗 Вначале необходимых выполняется (рис. 4). уравнивание (Фактически первой группы выполняется измерений, уравнивание так называемого в теории графов остовного дерева, если рассматривать таковое как полноценное геодезическое построение.) Таблица 3 – Необходимые измерения h, м -1,204 6,798 -5,943 -2,230 -8,180 8,34 266,895 1 2 7 8 9 10 ф1 S, м 18,2 17,5 19,2 11,3 17,7 11,800 1E-08 Матрица коэффициентов параметрических уравнений поправок: −1 −1 1 А1 = 0 0 0 (0 0 0 0 1 0 0 0 0 0 0 0 1 0 0 0 0 −1 −1 −1 1 0 1 0 0 0 0 0 1 Уравнивание выполняется по формулам: 𝑋̅ (1) = 𝐴1−1 𝑌1 Таблица 4 4 0 1 0 0 0 0 0 0 0 0 0 0 −1 0) 𝑋 (1) , м Н1 268,099 H2 271,812 H3 265,862 H4 274,042 HM1 266,895 HM2 274,897 HM3 265,702 Точность вычисления значений элементов вектора 𝑋 (1) характеризуется обратной весовой матрицей, определяющейся по формуле (1) 𝑄𝑋̅ = 𝐴1−1 𝑄1 𝐴1−𝑇 (1) 𝑄𝑋̅ 18,2 18,2 18,2 = 18,2 0,0 18,2 (18,2 18,2 48,7 37,4 37,4 0,0 18,2 37,4 18,2 37,4 55,1 37,4 0,0 18,2 37,4 18,2 37,4 37,4 37,4 0,0 18,2 37,4 0,0 0,0 0,0 0,0 0,0 0,0 0,0 18,2 18,2 18,2 18,2 0,0 35,7 18,2 18,2 37,4 37,4 37,4 0,0 18,2 49,2) Затем учитывается вторая группа измерений, избыточных. (Фактически выполняется уточнение отметок, полученных ранее.) h3 h4 h5 h6 Таблица 5 - Избыточные -4,914 14,8 -3,708 13,0 2,265 15,3 9,045 12,2 0 −1 0 1 −1 0 А2 = ( 1 0 −1 0 0 −1 0 0 0 0 1 0 0 0 Уравнивание выполняется по формулам: (1) 𝑍2Т = 𝑄𝑋 𝐴𝑇2 5 м м м м 0 0 0 1 0 0 ) 0 0 −18,2 −48,7 −37,4 Т 𝑍2 = −37,4 0,0 −18,2 (−37,4 0,0 −30,5 −19,2 −19,2 0,0 0,0 −19,2 0,0 −19,2 −36,9 −19,2 0,0 0,0 −19,2 0,0 −19,2 −36,9 −19,2 0,0 17,5 −19,2) (1) 𝑁2 = 𝑄𝑌2 + 𝐴2 𝑍2Т 63,5 30,5 𝑁2 = ( 19,2 19,2 30,5 43,5 19,2 19,2 19,2 19,2 52,2 36,9 19,2 19,2 ) 36,9 66,6 𝐿2 = 𝐴2 𝑋̅ (1) − 𝑌2 −0,003 −0,005 𝐿2 = ( )м −0,028 −0,010 𝑋̅ 2 = 𝑋̅ (1) − 𝑍2Т 𝑁2−1 𝐿2 Н1 H2 H3 H4 HM1 HM2 HM3 Таблица 6 - 𝑋̅ 2 268,101 271,808 265,847 274,036 266,895 274,895 265,696 (2) м м м м м м м (1) 𝑄𝑋̅ = 𝑄𝑋̅ − 𝑍2Т 𝑁2−1 𝑍2 (2) 𝑄𝑋̅ 10,17 6,53 9,51 = 8,35 0,00 9,78 ( 8,35 Контроль параметрических грубых 6,53 9,49 7,07 8,01 0,00 6,85 8,01 9,51 8,35 0,00 9,78 8,35 7,07 8,01 0,00 6,85 8,01 16,24 10,34 0,00 13,48 10,34 10,34 13,84 0,00 9,52 13,84 0,00 0,00 0,00 0,00 0,00 13,48 9,52 0,00 19,15 9,52 10,34 13,84 0,00 9,52 25,64) ошибок уравнений выполняется поправок, измерениям: 6 по свободным соответствующих членам избыточным (2) (2) |𝑙𝑖 | ≤ 3𝜇√𝑁𝑖𝑖 Таблица 7 - Контроль (2) h3 h4 h5 h6 (2) 𝑙𝑖 , м 0,003 0,005 0,028 0,010 𝑁𝑖𝑖 63,5 43,5 52,2 66,6 (2) доп. 𝑙𝑖 , м 0,072 0,059 0,065 0,073 Как видим, полученные значения не превысили установленный допуск, значит можно говорить о том, что они с высокой степенью вероятности (99,7%) не содержат грубых ошибок, следовательно, нет необходимости составлять матрицу для локализации грубых ошибок. 2. Фиксация всех исходных пунктов Учитывается ещё одна группа, в которую входят фиктивные измерения, соответствующие ещё не зафиксированным исходным данным. Таблица 8 - Фиктивные HM2 274,909 м HM3 265,898 м Матрица коэффициентов параметрических уравнений поправок: 0 0 0 А3 = ( 0 0 0 0 0 1 0 ) 0 0 0 1 Уравнивание выполняется по формулам: (2) 𝑍3Т = 𝑄𝑋 𝐴𝑇3 9,8 8,3 6,8 8,0 13,5 10,3 Т 𝑍3 = 9,5 13,8 0,0 0,0 19,1 9,5 ( 9,5 25,6) (2) 𝑁3 = 𝑄𝑌3 + 𝐴3 𝑍3Т 19,1 9,5 𝑁3 = ( ) 9,5 25,6 𝐿3 = 𝐴3 𝑋̅ (2) − 𝑌3 −0,014 𝐿3 = ( )м −0,202 7 𝑋̅ 3 = 𝑋̅ (2) − 𝑍3Т 𝑁3−1 𝐿3 Н1 H2 H3 H4 HM1 HM2 HM3 Таблица 9 - 𝑋̅ 3 268,140 271,856 265,891 274,128 266,895 274,909 265,898 (3) м м м м м м м (2) 𝑄𝑋̅ = 𝑄𝑋̅ − 𝑍3Т 𝑁3−1 𝑍3 (3) 𝑄𝑋̅ 4,60 2,26 2,02 = 1,96 0,00 0,00 (0,00 2,26 6,03 1,45 2,60 0,00 0,00 0,00 2,02 1,45 6,12 2,05 0,00 0,00 0,00 1,96 2,60 2,05 5,14 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00) Выполним контроль грубых ошибок: (3) (3) |𝑙𝑖 | ≤ 3𝜇√𝑁𝑖𝑖 № hф2 hф3 Таблица 10 - Контроль L2 Nii допL2 0,014 19,1 0,039 0,202 25,6 0,046 Как видно из таблицы, одно значение превышает установленный допуск. Если же полагать, что грубая ошибка единственна, то грубая ошибка содержится либо в исходном пункте M23, либо в измерении h10. Локализовать такую ошибку не представляется возможным в силу конфигурации сети. Измерение, в котором предполагается наличие грубой ошибки, исключим из уравнивания. 3. Исключение резко выделяющегося измерения 8 Учитывается очередная (третья) группа, в которую входит единственное реально выполненное измерение, в котором может содержаться грубая ошибка. Уравнивание выполняется по формулам: Таблица 12 - Резко выделяющееся измерение h10 8,340 м Матрица коэффициентов параметрических уравнений поправок: А4 = (0 0 −1) 0 1 0 0 Уравнивание выполняется по формулам: (3) 𝑍4Т = 𝑄𝑋 𝐴𝑇4 2,0 2,6 2,1 Т 𝑍4 = 5,1 0,0 0,0 (0,0) (3) 𝑁4 = 𝑄𝑌4 + 𝐴4 𝑍4Т 𝑁4 = (−12,4) 𝐿4 = 𝐴4 𝑋̅ (3) − 𝑌4 𝐿4 = (−0,110)м 𝑋̅ 4 = 𝑋̅ (3) − 𝑍4Т 𝑁4−1 𝐿4 Таблица 13 - 𝑋̅ 4 Н1 268,123 H2 271,833 H3 265,873 H4 274,082 HM1 266,895 HM2 274,909 HM3 265,898 (4) (3) м м м м м м м 𝑄𝑋̅ = 𝑄𝑋̅ − 𝑍4Т 𝑁4−1 𝑍4 9 (4) 𝑄𝑋̅ 4,91 2,68 2,34 = 2,78 0,00 0,00 (0,00 2,68 6,57 1,88 3,68 0,00 0,00 0,00 2,34 1,88 6,46 2,91 0,00 0,00 0,00 2,78 3,68 2,91 7,28 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00) Таблица 14 - Результаты уравнивания № Н1 H2 H3 H4 HM1 HM2 HM3 ̅ (4) = 𝑋̅ (4) , м 𝐻 𝑗 𝑗 268,123 271,833 265,873 274,082 266,895 274,909 265,898 (4) 𝑞𝐻̅𝑗 = (𝑄𝑋̅ ) 𝑗𝑗 (4) 𝑚𝐻̅ (4) = 𝜇 √(𝑄𝑋̅ ) , мм 𝑗𝑗 𝑗 4,91 6,57 6,46 7,28 0,00 0,00 0,00 6,6 7,7 7,6 8,1 0,0 0,0 0,0 4. Учёт ошибок исходных данных Учитывается ещё одна (пятая) группа, в которую входят все фиктивные измерения. Уравнивание выполняется по формулам: Таблица 15 - Фиктивные HM1 266,895 м HM2 274,909 м HM3 265,898 м Матрица коэффициентов параметрических уравнений поправок: 0 0 0 А5 = (0 0 0 0 0 0 0 1 0 0 0 0 1 0) 0 0 0 1 Уравнивание выполняется по формулам: (4) 𝑍5Т = 𝑄𝑋 𝐴𝑇5 10 4,5−9 5,9−9 2,6−9 𝑍5Т = 4,0−9 1,0−8 4,7−18 (1,1−18 4,7−9 3,1−9 6,6−9 2,9−9 4,7−18 1,0−8 −1,3−18 7,7−10 1,0−9 8,0−10 2,0−9 1,1−18 −1,3−18 1,0−8 ) Обратные веса этим измерениям назначим с учётом изменения их весов: 𝑞ИД = 1 = 𝛥𝑝 𝑝 ИД 1 − 1 𝑞ф Ошибки определения отметок исходных пунктов все будем считать равными 3 мм, откуда веса фиктивных измерений будут равны единице: 𝑚ИД = 3 мм, 𝑝ИД 2 𝜇2 𝑚км = 2 = 2 =1 𝑚ИД 𝑚ИД (4) 𝑁5 = 𝑄𝑌5 + 𝐴5 𝑍5Т −1,1−16 𝑁5 = ( 4,7−18 1,1−18 4,7−18 7,3−16 −1,3−18 1,1−18 −1,3−18 ) 7,3−16 𝐿5 = 𝐴5 𝑋̅ (4) − 𝑌5 0,000 𝐿5 = (0,000) м 0,000 𝑋̅ 5 = 𝑋̅ (4) − 𝑍5Т 𝑁5−1 𝐿5 Таблица 16 - 𝑋̅ 5 Н1 268,124 H2 271,834 H3 265,873 H4 274,084 HM1 266,898 HM2 274,909 HM3 265,899 (5) (4) м м м м м м м 𝑄𝑋̅ = 𝑄𝑋̅ − 𝑍5Т 𝑁5−1 𝑍5 11 (5) 𝑄𝑋̅ 5,07 2,91 2,41 2,92 0,42 2,91 6,89 1,99 3,89 0,56 2,41 1,99 6,46 2,97 0,24 = 2,92 3,89 2,97 7,40 0,38 0,42 0,56 0,24 0,38 0,95 −0,07 −0,05 −0,09 −0,06 −0,01 (−0,01 −0,01 −0,01 −0,03 0,00 −0,07 −0,05 −0,09 −0,06 −0,01 −0,14 0,00 −0,01 −0,01 −0,01 −0,03 0,00 0,00 −0,14) Так как отметки исходных пунктов, в свою очередь, были когда-то получены из уравнивания сети более высокого класса точности, то в действительности они не являются безошибочными, и средние квадратические ошибки в общем случае отличны от нуля, пускай, и значительно меньше, чем у остальных, определяемых пунктов в уравниваемой нами сети. Таблица 17 - Результаты уравнивания № ̅𝑗 = 𝑋̅ (5) , м 𝐻 𝑗 Н1 H2 H3 H4 HM1 HM2 HM3 268,124 271,834 265,873 274,084 266,898 274,909 265,899 (5) 𝑞𝐻̅𝑗 = (𝑄𝑋̅ ) 𝑗𝑗 5,07 6,89 6,46 7,40 1,00 1,00 1,00 (5) 𝑚𝐻̅ (5) = 𝜇 √(𝑄𝑋̅ ) , мм 𝑗𝑗 𝑗 6,8 7,9 7,6 8,2 3,0 3,0 3,0 Выводы: В результате рекуррентного уравнивания с последовательным учётом необходимых и избыточных измерений был выполнен контроль грубых ошибок, в последствии чего была обнаружена грубая ошибка в восьмом ходе и на дальнейшем этапе была проведена локализация этой грубой ошибки. По итогу дальнейшего уравнивания геодезической сети с фиксацией исходных данных был выполнен контроль, в результате которого ошибок исходных данных не обнаружено. 12