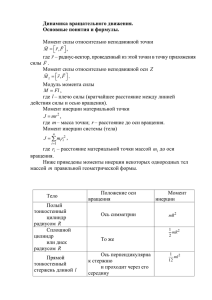
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ «РОСТОВСКИЙ ГОСУДАРСТВЕННЫЙ ЭКОНОМИЧЕСКИЙ УНИВЕРСИТЕТ (РИНХ)» ТАГАНРОГСКИЙ ИНСТИТУТ ИМЕНИ А. П. ЧЕХОВА Факультет физики, математики, информатики Кафедра теоретической, общей физики и технологии КУРСОВАЯ РАБОТА на тему: «ВРАЩЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ» Выполнил студент группы ФТ-131 направление Педагогическое образование Профиль Физика и Технология Корженко Н.В Руководитель курсовой работы Доктор физико-математических наук, профессор Жорник А.И Дата сдачи «___» __________________ 2020 г. Оценка _________________ Научный руководитель __________________/__________________/ Таганрог 2020 СОДЕРЖАНИЕ ВВЕДЕНИЕ .............................................................................................................. 3 1.ОСНОВНЫЕ ПОНЯТИЯ ..................................................................................... 5 1.1 Вращательное движение твердого тела ....................................................... 5 1.2 Основные кинематические характеристики................................................ 5 1.3 Основные динамические характеристики ................................................... 9 1.4. Основной закон динамики вращательного движения ............................. 14 2. ВРАЩЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ ..... 16 2.1. Момент количества движения твердого тела относительно оси вращения. ............................................................................................................ 16 2.2 Доказательство теоремы Штейнера ........................................................... 17 2.3 Колебания физического маятника .............................................................. 18 ЗАКЛЮЧЕНИЕ ..................................................................................................... 21 СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ ........................................... 22 2 ВВЕДЕНИЕ Очень важную роль в кинематике играет теория движения твердого тела. В механике твердое тело можно определить как систему материальных точек, расстояния между которыми неизменны. Реально существующие в природе системы могут, конечно, удовлетворять этому условию лишь приближенно. Но большинство твердых тел в обычных условиях так мало изменяет свою форму и размеры, что при изучении законов движения твердого тела, рассматриваемого как нечто целое, можно вполне отвлечься от этих изменений. В дальнейшем изложении мы будем рассматривать твердое тело как дискретную совокупность материальных точек, чем достигается некоторое упрощение выводов. Это, однако, ни в какой степени не противоречит тому обстоятельству, что в действительности твердые тела можно обычно рассматривать в механике как сплошные, совершенно не интересуясь их внутренней структурой. 1. Различают пять видов движения твердого тела: 2. Поступательное движение; 3. Вращение вокруг неподвижной оси; 4. Плоское движение; 5. Вращение вокруг неподвижной точки; 6. Свободное движение тела. Мы же будем рассматривать исключительно один вид движения, а именно - вращение вокруг неподвижной оси Цель исследования – изучить один из видов вращения, а именно вращение вокруг неподвижной точки. Исходя из цели исследования, определим задачи: 3 изучить вращательное движение твердого тела; рассмотреть основные понятия; изучить основные понятия вращения вокруг неподвижной оси; рассмотреть доказательства основных теорем. Объект исследования – теоретическая механика. Предмет исследования – вращение твердого тела вокруг неподвижной точки. Методы исследования: теоретический анализ научной и учебной литературы, сравнение, классификация, обобщение, синтез. 4 1.ОСНОВНЫЕ ПОНЯТИЯ 1.1 Вращательное движение твердого тела Вращение твердого тела может осуществляться вокруг неподвижной оси или вокруг точки. Вращательное движение вокруг неподвижной оси - это движение твердого тела, при котором все его точки, двигаясь в параллельных плоскостях, описывают окружности с центрами, лежащими на одной неподвижной прямой, называемой осью вращения. При этом все точки тела за данный промежуток времени поворачиваются на один и тот же угол. Тело, совершающее вращательное движение вокруг неподвижной оси (простое вращательное движение), имеет одну степень свободы, и его положение определяется углом поворота φ, а угловое перемещение - Δφ или dφ. Вращательное движение задается уравнением φ = φ(t). Тело, совершающее вращательное движение вокруг одной неподвижной точки (например, движение гироскопа), имеет три степени свободы. 1.2 Основные кинематические характеристики Основные кинематические характеристики вращательного движения тела - угловое перемещение Δφ или dφ, угловая скорость ω и угловое ускорение ε. Векторы 𝑑𝜔⃗ , 𝜔⃗ , 𝜀 - это псевдовекторы или аксиальные векторы, не имеющие определенную точку приложения: они откладываются на оси вращения из любой ее точки. Угловое перемещение — это псевдовектор, модуль которого равен углу поворота Δφ, а направление совпадает с осью, вокруг которой тело поворачивается, и определяется правилом правого винта: вектор 𝑑𝜑⃗ направлен в ту сторону, откуда поворот тела виден против хода часовой стрелки (рис. 1). В системе СИ угол поворота измеряется в радианах (рад). 5 Угловой скоростью называется величина, характеризующая быстроту вращения твердого тела, равная отношению элементарного угла поворота dφ к промежутку времени dt, за который произошел этот поворот, или первой производной угла поворота по времени. ω = lim ∆φ ∆t→0 ∆t dφ = dt . (1.1) Вектор угловой скорости 𝜔⃗ направлен вдоль оси вращения по правилу правого винта, т. е. так же, как и вектор 𝑑𝜑⃗ (рис. 1). Единица измерения угловой скорости - рад/с. Рисунок 1.1 Угловое ускорение - это величина, характеризующая быстроту изменения угловой скорости. При вращении тела вокруг неподвижной оси угловое ускорение определяется первой производной угловой скорости по времени(1.2). ε= ⃗⃗⃗ 𝑑𝜔 𝑑𝑡 = ⃗⃗ 𝑑 2⃗𝜔 𝑑𝑡 2 . 1.2 Вектор углового ускорения 𝜀 направлен вдоль оси вращения в сторону вектора 𝜔⃗ при ускоренном вращении ( 𝜀 ↑↑ 𝜔⃗ ) и противоположно вектору 𝜔⃗ - при замедленном вращении (𝜀 ↓↑ 𝜔⃗ ). Единица измерения углового ускорения - рад/с2 . 6 Зная угловое ускорение ε, начальное значение угловой скорости 𝜔⃗0 и начальное положение тела 𝜑⃗0 , можно полностью описать вращение тела(1.3). 𝑡 𝑡 𝜔⃗(𝑡) = 𝜔⃗0 ± ∫0 εd𝑡 , 𝜑⃗(𝑡) = 𝜑⃗0 ± ∫0 𝜔⃗𝑑𝑡. (1.3) При постоянном значении углового ускорения 𝜀 = 𝑐𝑜𝑛𝑠𝑡 тело совершает равнопеременное вращательное движение(1.4). ω(t) = ω0 ± εt, φ(t) = φ0 + ω0 t ± εt2 2 . (1.4) Вращение с постоянной угловой скоростью называется равномерным. Равномерное вращение можно характеризовать периодом вращения Т. Это время Δt = Т, за которое тело совершает один полный оборот, т. е. поворачивается на угол Δφ = 2π радиан. Значит(1.5), ω= 2π T . (1.5) . (1.6) или(1.6) 𝑇= 2𝜋 𝜔 Число оборотов в единицу времени называется частотой вращения(1.7) 𝑣= 1 𝑇 = 𝜔 2𝜋 . (1.7) Откуда угловая скорость(1.8) ω = 2πv. (1.8) Между угловыми величинами, характеризующими вращательное движение, и линейными параметрами, определяющими движение отдельных точек вращающегося тела, существует связь. Так, отдельные точки вращающегося тела имеют различные линейные скорости 𝜈 . Вектор линейной скорости непрерывно меняет свое направление, а величина 7 скорости ν зависит от скорости вращения тела ω и расстояния R рассматриваемой точки до оси вращения. То же относится к линейному пути ΔS, проходимому отдельной точкой при повороте тела на угол Δφ. Этот путь равен (рис. 1.1) ∆𝑆 = 𝑅∆𝜑⃗. 1.9 Таким образом, линейная скорость ν любой точки тела на расстоянии R от оси вращения связана с угловой скоростью ω выражением, которое получается путем дифференцирования (1.9) по времени с учетом, что R = const для рассматриваемой точки 𝑣= 𝑑𝑠 𝑑𝑡 =𝑅 𝑑𝜔 𝑑𝑡 = 𝑅𝜔⃗. 1.10 Для величин тангенциального ускорения получим соотношение, продифференцировав линейную скорость ν по времени 𝑎𝜏 = 𝑑𝑣 𝑑𝑡 =𝑅 𝑑𝜔 𝑑𝑡 = 𝑅𝜀. 1.11 Величина нормального ускорения точек вращающегося тела 𝑎𝑛 = 𝑣2 𝑅 = 𝜔⃗2 𝑅. 1.12 Из соотношений (9-12) видно, почему именно угловые параметры характеризуют кинематику вращательного движения, поскольку отдельные точки, расположенные на разных расстояниях от оси, имеют одинаковые угловые характеристики, но различные линейные, причем последние линейно растут с увеличением расстояния R точки от оси вращения. В общем случае вектор линейного ускорения состоит из нормальной 𝑎 𝑛 и тангенциальной 𝑎 𝜏 составляющих 𝑎 = 𝑎 𝑛 + 𝑎 𝜏 , причем нормальное ускорение характеризует быстроту изменения направления скорости, а тангенциальное - быстроту изменения величины скорости. 8 При равномерном движении по окружности тангенциальная составляющая 𝑎𝜏 = 0, так как линейная скорость не изменяется по величине v = const, а поскольку вектор скорости меняет свое направление, нормальная составляющая отлична от О и равна 𝑎𝑛 = 𝑣2 𝑅 , где R - радиус окружности, а вектор 𝑎 𝑛 направлен к центру окружности перпендикулярно линейной скорости. 1.3 Основные динамические характеристики Основными динамическими характеристиками простого вращательного движения тела являются момент импульса тела относительно неподвижной оси Z, 𝐿𝑧 = 𝐼𝑧 𝜔⃗ и кинетическая энергия При изучении вращения твердых тел вводят понятие момента инерции, характеризующее инертные свойства тела при вращательном движении. При поступательном движении его аналог - масса тела. Момент инерции тела - величина, характеризующая распределение массы тела относительно оси вращения. Рисунок 1.2 9 Осевым моментом инерции тела относительно оси OZ называется величина, равная сумме произведений масс всех материальных точек на квадраты их кратчайших расстояний до рассматриваемой оси. Суммирование производится по всем элементарным массам 𝑚𝑖 , на которые разбивается тело (рис. 2). 𝐼𝑧 = ∑𝑛𝑖 𝑚𝑖 𝑟𝑖2 . 1.13 где 𝑟𝑖 - кратчайшие расстояния точек от оси OZ. Для однородных тел 𝐼𝑧 = 𝑝 ∫𝑣 𝑟 2 𝑑𝑉. 1.14 где ρ - плотность тела, интегрирование ведется по всему объему тела V. Размерность момента инерции в системе СИ - кг•м2 Таким образом, осевой момент инерции тела зависит от массы тела, ее распределения относительно оси вращения и от выбора оси вращения. Наиболее просто момент инерции определяется для однородных и симметричных тел вращения, поскольку сводится к вычислению интегралов типа (1.4). Для тел произвольной формы - это сложная математическая задача, часто не решаемая, поэтому в этих случаях момент инерции определяется экспериментально. Выражение (14) позволяет достаточно легко рассчитать моменты инерции некоторых однородных и симметричных тел массы т относительно оси, проходящей через центр инерции тела. Приведем формулы для моментов инерции тел правильной геометрической формы. 1. Тонкое кольцо (или полый тонкостенный цилиндр) радиуса R. Ось вращения перпендикулярна плоскости кольца (торцам цилиндра). 𝐼 = 𝑚𝑅2 . 10 2.Сплошной диск (цилиндр) радиуса R, ось вращения перпендикулярна плоскости диска (торцам цилиндра). 1 𝐼 = 𝑚𝑅2 . 2 3. Тонкий стержень длины l, ось проходит через середину стержня и перпендикулярна его длине. 𝐼= 1 12 𝑚𝑙 2 . 4. Однородный шар радиуса R, ось проходит через центр шара 2 𝐼 = 𝑚𝑅2 . 5 Момент инерции тела относительно произвольной оси, не проходящей через центр инерции тела, определяется с помощью теоремы Штейнера: момент инерции тела I относительно любой оси вращения равен моменту его инерции 𝐼𝑐 относительно параллельной оси, проходящей через центр масс С тела, плюс произведение массы тела на квадрат расстояния d между этими осями (рис. 3) 𝐼𝑐 = 𝐼 + 𝑚𝑑 2 . 11 1.15 Рисунок 1.3 Например, момент инерции тонкого однородного стержня длины l относительно оси, проходящей через конец стержня перпендикулярно его длине, по теореме Штейнера определяется выражением 𝐼= ` 1 12 1 1 2 3 𝑚𝑙 2 + 𝑚( )2 = 𝑚𝑙 2 . 1.16 Основная мера взаимодействия тел в механике - это сила. Момент силы - это величина, характеризующая вращательный эффект силы при ее действии на твердое тело. Момент силы (или вращающий момент) 𝑀⃗ относительно фиксированной оси z - это векторная величина, определяемая выражением ⃗⃗ = [𝑟𝐹 ], 𝑀⃗ 1.17 где 𝑟 - радиус-вектор, проведенный от оси вращения z (перпендикулярно ей) в точку А приложения силы 𝐹 . Вектор силы 𝐹 лежит в плоскости, перпендикулярной оси z (рис. 4). 12 Рисунок 1.4 Вектор момента силы 𝑀⃗ совпадает с осью z, а его направление определяется правилом правого винта (п. 1.2). Модуль момента силы 𝑀⃗ = 𝐹𝑟 sin 𝛼 = 𝐹𝑑, 1.18 где α - угол между векторами 𝑟 и 𝐹 или их продолжениями, величина 𝑑 = 𝑟 sin 𝛼 - кратчайшее расстояние от точки О до линии действия силы F, называется плечом силы. Из определения момента силы относительно оси следует, что если линия действия силы пересекает ось вращения, она не создает вращающего момента, т. е. 𝑀⃗ = 0, поскольку плечо d = 0. Не создают момента также силы, параллельные оси вращения. Единица измерения момента силы - Н·м. Осевой момент импульса твердого тела - это векторная физическая величина, которая определяет, как количество, так и направленность запасенного телом вращательного движения и равна произведению момента инерции тела относительно оси на угловую скорость 13 𝐿⃗𝑧 = 𝐼𝑧 𝜔⃗ ⃗, 1.19 где 𝐼𝑧 - момент инерции тела относительно оси OZ; ω - угловая скорость вращения; 𝐿 𝑧 — вектор, имеет то же направление, что и вектор ω - по оси вращения (рис. 5). Размерность момента импульса в системе СИ : кг•м2 рад/с. Рисунок 1.5 1.4. Основной закон динамики вращательного движения Пусть ось вращения проходит через центр инерции тела. Продифференцируем (19) по времени, учитывая, что момент инерции тела остается постоянным в течение времени t, получим 1.20 т.е. 1.21 14 где 𝑀⃗ - векторная сумма моментов приложенных внешних сил. Это основное уравнение динамики простого вращательного движения тела относительно оси: изменение момента импульса тела зависит только от момента внешних сил. 15 2. ВРАЩЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ 2.1. Момент количества движения твердого тела относительно оси вращения. Твердое тело вращается вокруг неподвижной оси О1О2. Примем её за ось Оz жестко связанной с телом системы координат О𝑥𝑦𝑧 (Рис.2.1). Момент количества движения элемента тела массы dm, находящегося в точке с координатами x,y,z, относительно Оz равен 𝑑𝑘𝑧 = 𝑑𝑚ℎ𝑣. Вспоминая, что 𝑣 = ℎ𝜔⃗, где 𝜔⃗ – угловая скорость, получим: 2.1 Рисунок 2.1 Главный момент количества движения относительно оси: . 𝑝 = 𝑝(𝑥, 𝑦, 𝑧) – плотность 16 2.2 Велечину Iz = ∫V 𝜌(x 2 + y 2 ) dV называют моментом инерции тела относительно оси Оz. Момент количества движения тела (главный момент количества движения твердого тела), вращающегося вокруг неподвижной оси, относительно этой оси равен произведению момента инерции тела относительно той же оси на угловую скорость вращения. Отношение: 𝐼𝑧 ⁄М , где М = ∫𝑉 𝜌𝑑𝑉 – масса тела, имеет размерность квадрата длины. Обозначим его через 𝜉 2 . При вращении твердого тела вокруг неподвижной оси скорость элемента тела 𝜐 = 𝜔⃗ℎ. Его кинетическая энергия 𝑑Т = 𝑑𝑚 𝜔⃗2 ℎ2 /2. Кинетическая энергия тела: 2.3 2.2 Доказательство теоремы Штейнера Теорема: Момент инерции тела относительно некоторой оси О𝑧 равен моменту инерции относительно параллельной оси О𝑧 C, проходящей через центр инерции тела, сложенному с произведением массы тела на квадрат расстояния между осями. Доказательство: Вычислим моменты инерции некоторого тела сначала относительно оси, проходящей через центр инерции, а затем относительно произвольной параллельной ей оси. Пусть ось О𝑦 расположена в плоскости осей О𝑧 C и О𝑧 и перпендикулярна этим осям. В соответствии с рис. 2.2: 2.4 где 𝑦 = ℎ𝑐 со𝑠𝛼. 17 Рисунок 2.2 Тогда имеем: Но т.к. центр инерции лежит на оси О𝑧 C . Окончательно запишем: 𝐼𝑧 = 𝐼𝑧 с + М𝑑 2 2.5 2.3 Колебания физического маятника Физическим маятником называют тяжелое твердое тело, имеющее неподвижную горизонтальную ось вращения (Рис. 2.3). Обозначим через 𝐼𝑐 момент инерции тела относительно оси, проходящей через центр инерции С, перпендикулярно плоскости рисунка. Тогда в соответствии с теоремой Штейнера 𝐼0 = 𝐼𝑐 + 𝑚с2 . 2.6 Уравнение вращательного движения тела в проекции на Оz имеет вид: 18 𝐼0 𝜑⃗̈ = −𝑚𝑔𝑠 𝑠𝑖𝑛𝜑⃗ 2.7 При малых φ (𝜑⃗ ≪ 1) имеем: Рисунок 2.3 Решение этого уравнения φ = А cos(ωt + β). Период колебаний Т = 2𝜋⁄𝜔⃗. Момент инерции I с = mξ 2 (𝜉 − приведенная длина). Для Т можем записать Величину 𝑙 = (𝑠 2 + 𝜉 2 ) ⁄𝑠 называют эквивалентной длиной физического маятника. Отсюда можно записать 𝑙𝑠 = 𝑠 2 + 𝜉 2 . Корни этого уравнения обозначим посредством s и 𝑠 ∗ : 𝑠 + 𝑠 ∗ =𝑙, 𝑠 𝑠 ∗ =𝜉 2 . Видно, что данный период колебаний Т можно получить, поместив ось подвеса в О или О1. Теория физического маятника является исторически первой разрешенной задачей динамики системы. Ее решил Гюйгенс (1629-1695). Динамика как наука берет начало от Галилея (1654-1642). Им были открыты 19 весьма существенные свойства равнопеременного движения. Работы Галилея продолжил и развил Гюйгенс. Он распространил теорию ускоренного и замедленного движения материальной точки, т.е. поступательного движения, на случай вращательного движения тел, разработал теорию колебаний физического маятника. Гюйгенс ввел в механику понятие о моменте инерции тела относительно оси. В 1690 г. Гюйгенс опубликовал «Трактат о свете», в котором изложил волновую теорию света и рассмотрел некоторые интересные задачи распространения света. Труды Гюйгенса явились продолжением исследований Галилея и были широко использованы И. Ньютоном (1643-1727). Основную работу Гюйгенса «Маятниковые часы» Ньютон считал превосходной. 20 ЗАКЛЮЧЕНИЕ В данной работе были описаны основные подходы к кинематическому описанию вращательного движения твердого тела. Являясь одним из основных разделов кинематики, теория движения тела вокруг неподвижной оси применяется в теоретической механике для решения ряда инженерных задач, в частности при расчетах различных подвижных конструкций в строительстве, роторных механизмов в машиностроении, описании движения молекул в молекулярной физике и биофизике. Являясь более общим случаем, теория движения тела вокруг неподвижной точки позволяет перейти от рассмотрения кинематики тела с одной степенью свободы к рассмотрению кинематики тела с тремя степенями свободы. А дополнив уравнения вращения уравнениями кинематики поступательного движения тела можно рассмотреть свободное движения твердого тела с достаточно сложными траекториями точек этого тела. В итоге полученный математический аппарат позволяет решить практически любую задачу и предсказать будущее положение тела по известным начальным условиям, что и является основной целью кинематического описания движения. 21 СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ 1. Бутенин, Н.В. Курс теоретической механики / Н.В. Бутенин, Я.Л. Лунц, Д.Р. Меркин. – М.: Высш. школа, 2002. 2. Жуковский, Н.Е. Кинематика, статика, динамика точки. Университетский курс / Н.Е. Жуковский. – М.: Едиториал УРСС, 2015. 3. Кинематика, динамика и точность механизмов. – М.: Машиностроение, 1984. 4. Бутенин, Н.В. Введение в аналитическую механику / Н.В. Бутенин. – М.: Наука, ГРФМЛ, 1971. 5. Голдстейн, Г. Классическая механика / Г. Голдстейн. – М.: Наука, 6. Ольховский, И.И. Курс теоретической механики для физиков/ 1975. И.И. Ольховский. – М.: Наука, 1974. 7. Никитин, Н.Н. Курс теоретической механики / Н.Н. Никитин. – М.: Высш. школа, 1990. 8. Яблонский, А.А. Курс теоретической механики / А.А. Яблонский, В.М. Никифорова. – М.: Высш. школа, 2001. 9. Бать, М.И. Теоретическая механика в примерах и задачах. Т. 1./ М.И. Бать, Г.Ю. Джанелидзе, А.С. Кельзон. – М.: Высш. школа, 2001. 10. Тарг, С.М. Краткий курс теоретической механики [Текст] / С.М. Тарг. – М.: Высш. школа, 1995. 22