Толмачева Нелла Дмитриевна доцент кафедры общей физики
реклама

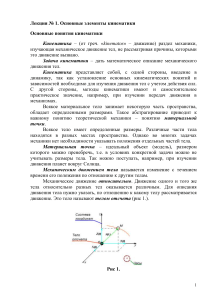
Сегодня: понедельник, 9 мая 2016 г. Толмачева Нелла Дмитриевна доцент кафедры общей физики Академик А.Ф. Иоффе (1880 – 1960), российский физик, определил физику, как науку, изучающую общие свойства и законы движения вещества и поля. Физика и другие науки Ричард Фейнман Физика – это самая фундаментальная, самая всеобъемлющая из всех наук: огромным было её влияние на все развитие науки. Понятие механики, модели в механике Механика – часть физики, которая изучает закономерности механического движения и причины, вызывающие или изменяющие это движение. Механическое движение – это изменение с течением времени взаимного расположения тел или их частей. Механика - статика, кинематика и динамика . Галилео Галилей (Galileo Galilei) Родился 15 февраля 1564 Пиза (Pisa) Италия Умер 8 января 1642 Арчетри (Arcetri) Италия астроном, философ и физик. Важнейшие роботы улучшение телескопа; астрономические наблюдения; первый закон движения Исаак Ньютон (Isaac Newton) Родился 4 января 1643 Вулсторп (Woolsthorpe) Англия Умер 31 марта 1727 Лондон (London) Англия физик, математик, астроном, алхимик и философ Важнейшие работы закон всемирного тяготения дифференциальное и интегральное исчисления изобрел зеркальный телескоп развил корпускулярную теорию света Альберт Эйнштейн (Albert Einstein) Родился 14 марта 1879 Ульм (Ulm) Германия Умер 18 апреля 1955 Принцетон (Princeton ) США (New Jersey) величайший ученый 20 века Важнейшие работы: теория относительности; квантовая и статистическая механика; космология Нобелевская премия по физике 1921 физические модели: 1.абсолютно твердое 2.материальная точка. тело 2.2. Система отсчета, тело отсчета Всякое движение относительно. Для описания движения вводится система отсчета Уравнения движения Рассмотрим движение материальной точки относительно некоторой СО K Пусть за некоторый промежуток времени материальная точка переместилась из точки пространства M1 в точку M2 Z М1 L Соединим начало координат с точками M1 и M 2 K - это радиус-векторы r(t1) и r(t2) ------------------------------------------------ Уравнения движения, описывающие положение материальной точки), можно записать в векторном виде или в координатной форме r r (t ) x x(t ) y y (t ) z z (t ) М2 X O r(t1) r(t2) Y r r t xi yj zk , Кинематика материальной точки Траектория. Путь. Перемещение. r r r x x i y y j z z k ; Δ r Δxi Δyj Δzk ; Δ r Δx Δy Δz . Δr dr lim . Δt dt 2 1 0 2 Δt 0 0 2 2 0 Проекция вектора скорости на оси координат dx dt x dy dz υ y ; υz . dt dt dx dy dz i j k i j k, dt dt dt x y z Модуль вектора скорости: 2 2 x y 2 z Ускорение. Нормальное и тангенциальное ускорения Быстрота изменения скорости по времени и направлению характеризуются ускорением: d a dt При произвольном движении an Z точки имеем: a n a (t ) a an М K O X τ L aτ v r(t) Y a a . r 2 n dυ aτ dt n a a a 2 2 n Типы ускорений Чтобы более наглядно представить свойства введенных составляющих полного ускорения, рассмотрим примеры движений частицы, при которых эти составляющие возникают Частица движется прямолинейно vr ar aτ vn a Частица движется по дуге окружности r an Вспомним несколько полезных формул: При равномерном движении t S dt t 0 При движении с постоянным ускорением 2 at S υ 0t . 2 at 0 Обратная задача кинематики заключается в том, что по известному значению ускорения a(t) найти скорость точки и восстановить траекторию движения r(t). t2 (t ) (t ) a(t )dt 0 t1 t2 r (t ) r (t ) (t )dt. 0 t1 Вращательное движение вокруг неподвижной оси Пусть абсолютно твердое тело вращается вокруг неподвижной оси ОО' dφ ω dt dφ ω . dt Связь линейной и угловой скорости , dr Rdφ υ ωR dt dt Период Т – промежуток времени, в течение которого тело совершает полный оборот (т.е. поворот на угол φ 2π ) 2π Т ; ω Частота ν – число оборотов тела за 1 сек. 1 ν . Т Угловая скорость 2π ω 2 πν; Т dω ε dt ε ε ε Выразим нормальное и тангенциальное ускорения точки М через угловую скорость и угловое ускорение: dυ d dω aτ (ωR) R Rε; dt dt dt a R ; υ 2 an ω R. R 2 Формулы простейших случаев вращения тела вокруг неподвижной оси: - равномерное вращение ε 0; ω const; φ φ0 ωt ; - равнопеременное вращение ω ω 0 εt εt φ ω 0t 2 2 ε const ; Обратите внимание. Все кинематические параметры, характеризующие вращательное движение (угловое ускорение, угловая скорость и угол поворота) направлены вдоль оси вращения.