L13-1
Реклама

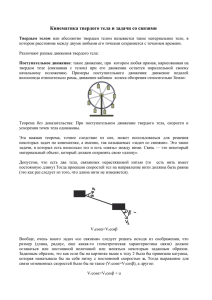
Лекция 13 Движения твердого тела Равновесие твердого тела. Кинематика и динамика форм движений твердого тела. Вычисление моментов инерции. Теорема ГюйгенсаШтейнера. Сведение плоского движения к поступательному и аксиальному движениям. Мгновенная ось вращения. Главные и свободные оси вращения твердого тела. Кинетическая энергия вращательного движения. Многие прикладные задачи механики связаны с равновесием или с разнообразными движениями твердого тела. Исследование этих движений, вообще говоря, представляет достаточно сложную математическую задачу. Аналитическими методами они решаются лишь в относительно простых случаях. Здесь мы рассмотрим некоторые простейшие движения, причем, считая тело абсолютно твердым. Исследование движений твердого тела в физике представляет интерес также с иной точки зрения. Ведь с твердым телом часто связывают систему отсчета. И знание ее возможных движений является весьма важным. Мы уже установили, что твердое тело обладает шестью степенями свободы. Для исследования движений такой системы необходимо иметь шесть независимых скалярных (или двух векторных) уравнений. Таковыми являются уравнение движения центра инерции и уравнение моментов: dvc Fi вш F вш , dt dL [ri Fi вш ] M вш . dt m (13.1) (13.2) Причем уравнение моментов можно применить как относительно произвольной неподвижной точки и центра инерции тела, так и относительно любой точки, мгновенная скорость которой параллельна скорости центра инерции тела. Заметим, что в правых частях этих уравнений входят лишь внешние силы. Внутренние силы никак не влияют на равновесие и движения тела. Если на тело наложены связи, то, убывая число степеней свободы, они уменьшают и количество уравнений, описывающих его движения. Равновесие твердого тела. Для покоящегося твердого тела уравнения (13.1), (13.2) переходят в F вш 0, M вш 0, (13.3) которые представляют необходимые, но недостаточные условия равновесия твердого тела, так как при их выполнении центр инерции может двигаться с постоянной скоростью, а само тело – вращаться с постоянной угловой скоростью. Вопросами равновесия тел занимается отдельный раздел механики – статика. Типы движения твердого тела. Различаются следующие типы движения твердого тела: - поступательное, - аксиальное, - сферическое, - плоское, - произвольное. Однако оказывается, основными являются поступательное и аксиальное типы движений, так как скоро увидим, что все остальные движения сводятся к этим двум. Поступательным называется движение, при котором линии, соединяющие любые две точки твердого тела, перемешаются параллельно самим себе. Это простейший тип движения, при котором все точки твердого тела имеют одинаковые скорости, ускорения и описывают одинаковые траектории. Поэтому исследование поступательного движения сводится к изучению движения его какой-либо точки, например его центра инерции. Следовательно, поступательное движение обладает тремя степенями свободы и описывается уравнением движения центра инерции (13.1), с помощью которого, имея начальные условия, находим закон движения. Основные формулы, описывающие поступательное движение, являются: Закон движения rc rc (t ), уравнение движения mac F вш , ac vc , vc rc , импульс P mvc , (13.4) кинетическая энергия K 12 mvc2 P 2 / 2m. Аксиальным называется движение тела вокруг неподвижной оси. Очевидно, при этом все точки описывают окружности, центры которых лежат на неподвижной оси, которая называется осью вращения. Кинематика аксиального движения. Если описание кругового движения материальной точки можно осуществить «линейными» кинематическими характеристиками r , v, a , не прибегая к угловым величинам , , , то при описании аксиального движения твердого тела нельзя обойтись без введения последних. Дело в том, что разные точки вращающегося тела характеризуются разными значениями r , v, a , в то время как все они имеют одинаковые и . Что касается линейным параметрам, то они связаны с угловыми параметрами формулами dr d r , v r , a r 2 r (13.5) и характеризуют движения отдельных точек, а не вращения тела в целом. Динамика аксиального движения. Аксиальное движение обладает одной степенью свободы. Закон движения t (13.6) определяется решением основного уравнения динамики вращательного движения I M вш , где I , M вш (13.7) – момент инерции тела и момент внешних сил относительно оси вращения соответственно, а , - проекции углового ускорения и угловой скорости на ось вращения. (13.8) Задавая начальные условия движения 0 0 и 0 0 , по известному моменту внешних сил и решая уравнения (13.7) и (13.8), получим соответствующий закон движения (13.6). Момент импульса (угловой момент L ) и кинетическая энергия аксиального движения тела, как показали ранее, выражаются формулами L I , K 12 I 2 L2 2I , (13.9) где I - момент инерции тела относительно неподвижной оси. Аналогия формул, описывающих поступательное и аксиальное движения очевидна. Заменой m I , vc , P L, F M из формул поступательного движения получаем соответствующие формулы аксиального движения и наоборот. Сферическим называется движение тела с одной неподвижной точкой. Такое тело может совершить лишь независимые вращения вокруг трех взаимно перпендикулярных осей, проходящих через неподвижную точку О. Так что сферическое движение обладает тремя степенями свободы и описывается уравнениями моментов (13.2) относительно неподвижной точки. Более удобными для применения представляются эти уравнения, написанные относительно вращающейся с твердым телом системе отсчета. Они называются уравнениями Эйлер, которые выходят за рамки курса общей физики. Здесь мы ограничимся лишь доказательством теоремы Эйлера, которая твердит, что в любой момент времени сферическое движение можно представить как аксиальное движение вокруг некоторой мгновенной оси, проходящей через закрепленную точку. Рис. 13.1 Пусть тело участвует в двух вращениях – с угловой скоростью которая в свою очередь вращается с угловой скоростью За элементарный промежуток времени вращений совершит перемещения dt 2 вокруг 1 вокруг оси ОА, оси ОВ (рис.13.1а ). некоторая точка D тела в результате этих dr1 d1r 1r dt , dr2 d2 r 2 r dt . В итоге эта точка относительно неподвижной точки О переместится на dr (1 2 )r dt , что соответствует вращению тела с угловой скоростью 1 2 , направленной вдоль мгновенной оси ОМ (рис.13.1б ). Полученный результат можно обобщить в случае произвольного числа вращений. Т.е. если тело одновременно участвует в n вращениях с угловыми скоростями 1 , 2 ,..., n вокруг разных осей, проходящих через неподвижную точку О, то такое движение равносильно вращению тела с угловой скоростью , которая в данный момент времени дает положение мгновенной оси в пространстве.