Динамика вращательного движения
реклама

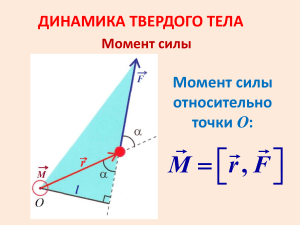
Динамика вращательного движения. Основные понятия и формулы. Момент силы относительно неподвижной точки M r , F , где r – радиус-вектор, проведенный из этой точки в точку приложения силы F . Момент силы относительно неподвижной оси Z M z r , F . Модуль момента силы M Fl , где l – плечо силы (кратчайшее расстояние между линией действия силы и осью вращения). Момент инерции материальной точки J mr 2 , где m – масса точки; r – расстояние до оси вращения. Момент инерции системы (тела) n J mi ri2 , i 1 где ri – расстояние материальной точки массой mi до оси вращения. Ниже приведены моменты инерции некоторых однородных тел массой m правильной геометрической формы. Тело Полый тонкостенный цилиндр радиусом R Сплошной цилиндр или диск радиусом R Прямой тонкостенный стержень длиной l Положение оси вращения Ось симметрии То же Ось перпендикулярна к стержню и проходит через его середину Момент инерции mR 2 1 mR 2 2 1 ml 2 12 Ось перпендикулярна к стержню и проходит через его конец Ось проходит через центр шара То же Шар радиусом R 1 2 ml 3 2 mR 2 5 В случае непрерывного распределения масс (сплошного однородного твердого тела) J r 2 dm r 2 dV , m V где – плотность тела; V – его объем. Теорема Штейнера J J c ma 2 , где J c – момент инерции тела относительно оси, проходящей через центр масс; J – момент инерции относительно параллельной оси, отстоящей от первой на расстоянии a ; m – масса вращающегося тела. Момент импульса материальной точки относительно неподвижной точки L r , p r , m . Момент импульса (момент количества движения) твердого тела относительно неподвижной оси вращения n Lz mi i ri J z z , i 1 где ri – расстояние от оси z до отдельной частицы тела; mi i – импульс этой частицы; J z – момент инерции тела относительно оси Z ; z – угловая скорость вращения. Закон сохранения момента импульса (момента количества движения) для замкнутой системы n Li const . i 1 Для двух взаимодействующих тел закон сохранения момента импульса J11 J 22 J11 J 2 2 , где J1 , J 2 , 1 , 2 – моменты инерции и угловые скорости тел до взаимодействия; J1 , J 2 , 2 , 2 – те же величины после взаимодействия. Основное уравнение (закон) динамики вращательного движения твердого тела относительно неподвижной оси d dL M z Jz J z , ; dt dt где – угловое ускорение; J z – момент инерции тела M относительно оси Z . Элементарная работа при вращении тела dA M z d , где d – угол поворота тела; M z – момент силы относительно оси z. Работа внешних сил при повороте твердого тела на конечный угол φ A M zd . 0 Если M z = const, то работа A M z . Кинетическая энергия тела, вращающегося вокруг неподвижной оси Z, J z 2 WКар , 2 где J z – момент инерции тела относительно оси Z ; – его угловая скорость. Кинетическая энергия тела, катящегося по плоскости без скольжения, 1 1 WK mc2 J c2 , 2 2 где m – масса тела; c – скорость центра масс тела; J c – момент инерции тела относительно оси, проходящей через его центр масс; – угловая скорость тела. Напряжение при упругой деформации тела F , S Где F – растягивающая (сжимающая) сила; S – площадь поперечного сечения тела. Относительное продольное растяжение (сжатие) l , l Где l – изменение длины тела при растяжении (сжатии); l – длина тела до деформации. Относительное поперечное растяжение (сжатие) d , d где d – изменение диаметра стержня при растяжении (сжатии); d – диаметр стержня. Связь между относительным поперечным сжатием (растяжением) и относительным продольным растяжением (сжатием) : , где – коэффициент Пуассона. Закон Гука для продольного растяжения (сжатия) E , где E – модуль Юнга. Потенциальная энергия упругорастянутого (сжатого) тела W l 0 1 ES E 2 2 Fdx (l ) V, 2 l 2 где V – объем тела.