Київський національний університет будівництва і архітектури
Кафедра будівельних машин
КУРСОВА РОБОТА
з дисципліни «Проектування і конструювання робототехнічних систем»
на тему: «Проектування і конструювання робототехнічних систем»
Студента 4 курсу 41 групи
напряму підготовки ФАІТ
спеціальності ІЛС
Пригоцький В.В.
Керівник доцент Горбатюк Є.В.
__________________________________
(посада, вчене звання, науковий ступінь, прізвище та ініціали)
Національна шкала ________________
Кількість балів: __________Оцінка:
ECTS _____
Члени комісії
_____________________________________________
(підпис)
(прізвище та ініціали)
________________ ___________________________
(підпис)
(прізвище та ініціали)
________________ ___________________________
(підпис)
м. Київ – 2021 р.
(прізвище та ініціали
Загальнані положення
Робота над курсовою роботою сприяє поглибленому вивченню
теоретичних
положень
дисципліни
“Проектування
і
конструювання
робототехнічних систем”, набуттю навичок розрахунку і конструювання
складальних одиниць та деталей робототехнічних систем, закріпленню знань
з оформлення машинобудівних креслень, допомагає у підготовці до екзамену
з даного курсу.
У цих методичних вказівках викладено вимоги й подано пояснення з
окремих частин курсової роботи.
Завдання на курсову роботу видає викладач кожному студентові
індивідуально. Курсова робота складається з розрахунково-пояснювальної
записки та графічної частини. Оформлення курсової роботи має відповідати
діючим стандартам.
Викладач здійснює постійний контроль за графіком виконання курсової
роботи як на заняттях, так і на спеціально призначених консультаціях.
При
визначенні
загальної
оцінки
захисту
курсової
враховуються:
а) точність розрахунків і змістовність пояснень до них;
б) доцільність прийнятих конструктивних рішень;
в) правильність і якість виконання графічної частини;
г) якість захисту курсової роботи (відповіді на запитання).
роботи
Варіант 13
Вихідні дані для проектування
Таблиця 1.1
Номер схеми
1.В
Розмір зони обслуговування, м: l×h
3×3
Вантажопідйомність m, кг
8400
Технологічні відстані,м:
x0
3
y0
3
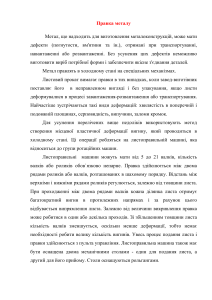
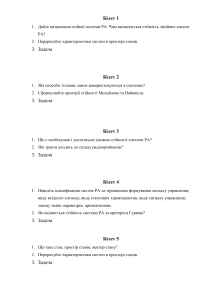
Рис. 1.1. Кінематичні схеми маніпулятора бетонороздавача
Розрахунок
Вибір конструктивної схеми та розмірів основних частин
Ааналог =
𝑚 + 0,56 8,4 + 0,56
=
= 17,92м.
0,5
0,5
де m – вантажопідйомність маніпулятора, т;
Визначається мінімальний та максимальний розрахунковий виліт
маніпулятора для заданої робочої зони, м:
А𝑚𝑎𝑥 = √(𝑥0 + 𝑙)2 + (𝑦0 + ℎ)2 = √(3 + 3)2 + (0 + 3)2 = 6,7м.
𝐴𝑚𝑖𝑛 = √𝑥02 + 𝑦02 = √32 +32 = 3 м.
де l, h – розміри робочої зони маніпулятора, м; x0, y0 – мінімальні відстані до
робочої зони обслуговування маніпулятора, м.
Порівняти показники мінімального та максимального вильоту з
трендовим параметром вильоту машини-аналога (табл. 2.1) і задати значення
коефіцієнту збільшення вильоту КA, який рекомендується брати більше 1.
Технічна характеристика будівельних маніпуляторів машин-аналогів
Таблиця 2.1
Параметри
Показники
Максимальна
0,9-1
вантажопідйомність, т
Вантажопідйомність на
0,43-0,35
максимальному вильоті, т
Максимальний виліт стріли,
3,1-6,7
м
Маса без гідронасоса та
0,19-0,63
робочої рідини, т
Використовуючи рівняння зв’язку для заданої кінематичної схеми
маніпулятора, визначаються орієнтовні розміри ланок стріли, які б
забезпечували заданий виліт в межах робочої зони:
𝐴2𝑚𝑎𝑥
КА
= 𝑙12 + 𝑙22 − 2𝑙1 𝑙2 𝑐𝑜𝑠𝛽𝑚𝑎𝑥
2
(𝑐𝑜𝑠𝜑1 )
𝐴2𝑚𝑖𝑛
= 𝑙12 + 𝑙22 − 2𝑙1 𝑙2 𝑐𝑜𝑠𝛽𝑚𝑖𝑛
2
(𝑐𝑜𝑠𝜑
)
2
{
Кути φ1 та φ2 розраховуються за формулами, град:
ℎ + 𝑦0
3+0
= 𝑎𝑟𝑐𝑡𝑎𝑛 (
) = 46°
𝑙 + 𝑥0
3+3
𝑦0
𝜑2 = 𝑎𝑟𝑐𝑡𝑎𝑛 = arctan(0) = 0°
𝑥0
𝜑1 = 𝑎𝑟𝑐𝑡𝑎𝑛
Задаючись параметром кута повороту β, визначаються розміри ланок
маніпулятора, а результати розрахунку заносяться в табл. 2.2 для різних
варіантів виконання
Виконання 1
𝛽𝑚𝑎𝑥 𝛽𝑚𝑖𝑛
90
36
Таблиця 2.2
Виконання 3
Виконання 2
𝑙1
𝑙2
5,08
4,37
𝛽𝑚𝑎𝑥 𝛽𝑚𝑖𝑛
100
40
𝑙1
𝑙2
4,47
4,28
𝛽𝑚𝑎𝑥 𝛽𝑚𝑖𝑛
110
42
𝑙1
𝑙2
4,43
3,74
За табл. 2.2 приймається рішення, щодо розмірів ланок l 1 і l2 стріли
маніпулятора.
Розраховується номінальна маса вантажу, т:
𝑚ван_𝐻 =
𝑚𝐴𝑚𝑖𝑛 6 ∙ 6,7
=
= 3,76.
𝐴𝑚𝑎𝑥
3
де m – задана вантажопідйомність, т.
Згідно табл. 2.1 по заданій вантажопідйомності, номінальній масі
вантажу та вильоту, вибрати машину-аналог і визначити масу його
металоконструкції:
- маса маніпулятора, т
𝑚м = 1,1 ∙ 𝑚аналог = 0,95 ∙ 1 = 1,045.
де mаналог – маса маніпулятора вибраної машини –аналога, т.
- маса кореневої секції стріли (основної стріли), т:
𝑚1 = 0,09 ∙ 𝑚м ∙ 𝑙1 = 0,09 ∙ 1,045 ∙ 4,47 = 0,124.
де l1 – довжина кореневої секції стріли, м.
- маса поворотної секції стріли, т:
𝑚2 = 0,078 ∙ 𝑚м ∙ 𝑙2 = 0,078 ∙ 1,045 ∙ 4,28 = 0,348.
де l2 – довжина поворотної секції стріли, м.
- маса опорної стійки стріли, т:
𝑚кол = 0,16 ∙ 𝑚м = 0,16 ∙ 1 = 0,16.
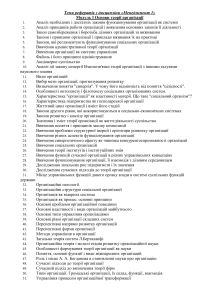
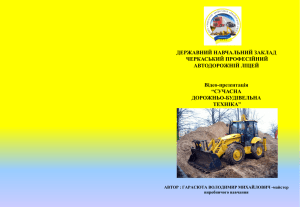
В
масштабі
виконується
технологічна
розрахункова
схема
маніпулятора із заданим робочим простором обслуговування (див. рис. 2.1).
Використовуючи розроблену схему графічним шляхом визначаються
наближені максимальні та мінімальні значення кутів повороту α та β стріли
маніпулятора, при цьому, значення кута пороту β ланки l2 потрібно узгодити
із попередньо прийнятими параметрами.
Рисунок 2.1. Розрахункова схема маніпулятора
Використовуючи
розрахункову
схему
маніпулятора
(рис.
2.1)
графічним шляхом визначити установчі розміри a, b, c та d привідних
гідроциліндрів, дотримуючись рекомендацій щоб a + b > q1max; c + d > q2max;
|a - b| < q1min; |c - d| < q2min.
Взаємозв’язок між кутом повороту та довжиною гідроциліндра
встановлюється наступними виразами, м:
- для схеми на рис. 1.1 в:
𝑞1 = √𝑎2 + 𝑏 2 + 2𝑎𝑏𝑐𝑜𝑠(𝛼 − 𝛼1 )
𝑞2 = √𝑐 2 + 𝑑 2 + 2𝑐𝑑𝑐𝑜𝑠𝛽
де a, b, c та d – установчі розміри гідроциліндрів, м; α та β – кути повороту
ланок, град; α1 – кут установки підйомного гідроциліндра (попередньо
прийняти α0 = 0…10°.
Визначені установчі розміри привідних гідроциліндрів заносяться до
табл. 2.3 та підбирається оптимальне рішення.
Таблиця 2.3
До розрахунку розмірів маніпулятора
𝑞1 , м
𝛼, град
𝑞1𝑚𝑎𝑥
𝑞1𝑚𝑖𝑛
𝛼𝑚𝑎𝑥
𝛼𝑚𝑖𝑛
a,м
b,м
𝑞2 , м
𝑞2𝑚𝑎𝑥
𝑞2𝑚𝑖𝑛
𝛽, град c,м d,м
𝛽𝑚𝑎𝑥
𝛽𝑚𝑖𝑛
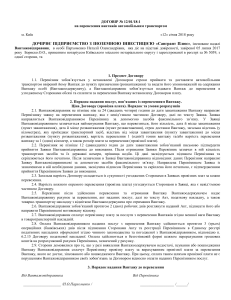
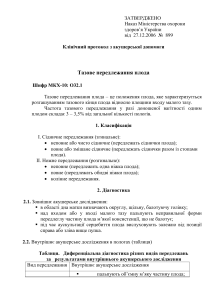
Рис. 2.2. Варіант встановлення гідроциліндра підйому стріли та його
установчі розміри
Розрахунок механізму приводу стріли маніпулятора
Послідовність розрахунку містить наступні пункти.
Розраховується середнє прискорення переміщення вантажу, м/с2:
[𝑎𝑚𝑎𝑥 ]
0,6
=
= 0,48
𝐾𝑎
1,25
𝑎ср =
де Ka = 1,2…1,3; [amax] – максимально допустиме прискорення робочого
органу маніпулятора (для
вантажного
маніпулятор
та маніпулятора
лісозаготівельної машини [amax] = 0,2…0,6 м/с2 ; для всіх інших
[amax] = 0,6…1,1 м/с2 )
Максимальна швидкість переміщення робочого органу буде, м/с:
𝑉𝑚𝑎𝑥 = 𝑎ср 𝑡р = 0,48 ∙ 1,3 = 0,62
де tp = 0,5…2,1 c – час розгону.
Розраховується час гальмування, с:
𝑡г = 𝑡р 𝐾3 = 1,3 ∙ 2 = 2,6
де К3 = 1,5…2,5 – коефіцієнт пропорційності часу гальмування.
Довжину
шляху
переміщення
робочого
органу
маніпулятора
визначають за наступним виразом, м:
𝑆 = √(𝑥𝑘 − 𝑥𝑛 )2 + (𝑦𝑘 − 𝑦𝑛 )2
𝑆 = √(6 − 3)2 + (3 − 0)2 = 4,24
де xn=x0, xк=(x0+l), уn=y0, ук=(y0+h) – початкові та кінцеві координати
робочого органу, м. Уточнюється час усталеного руху, с:
1 2𝑆
𝑡𝑦 = (
− 𝑡𝑝 − 𝑡г )
2 𝑉𝑚𝑎𝑥
1 2 ∙ 4,24
𝑡𝑦 = (
− 1,3 − 2,6) = 4,85
2 0,62
Визначається тривалість часу циклу, с:
𝑡ц = 𝑡𝑦 + 𝑡𝑝 + 𝑡г
𝑡ц = 4,85 + 1,3 + 2,6 = 8,75
Визначається зміна кутів повороту ланок на заданому переміщенні,
град.:
∆𝛼 = 𝛼к − 𝛼𝑛 = 65,45 − 66,57 = 1,09
∆𝛽 = 𝛽к − 𝛽𝑛 = 100,9 − 40,3 = 60,6
де початкове та кінцеве значення кутів повороту визначаються наступними
виразами
𝑙2 𝑠𝑖𝑛𝛽𝑛(к)
𝑦𝑛(к)
𝛼𝑛(к) = 𝑎𝑟𝑐𝑠𝑖𝑛 (
) + 𝑎𝑟𝑐𝑡𝑎𝑛 (
)
𝑟𝑛(к)
𝑥𝑛(к)
4,28 ∙ sin(40,3)
0
) + 𝑎𝑟𝑐𝑡𝑎𝑛 ( ) = 66,57
3
3
4,28 ∙ sin(100,6)
3
𝛼к = 𝑎𝑟𝑐𝑠𝑖𝑛 (
) + 𝑎𝑟𝑐𝑡𝑎𝑛 ( ) = 65,45
6,71
6
𝛼𝑛 = 𝑎𝑟𝑐𝑠𝑖𝑛 (
𝛽𝑛(к)
2
𝑙12 + 𝑙22 − 𝑟𝑛(к)
= 𝑎𝑟𝑐𝑐𝑜𝑠 (
)
2𝑙1 𝑙2
4,472 + 4,282 − 32
𝛽𝑛 = 𝑎𝑟𝑐𝑐𝑜𝑠 (
) = 40,3
2 ∙ 4,47 ∙ 4,28
4,472 + 4,282 − 6,712
𝛽к = 𝑎𝑟𝑐𝑐𝑜𝑠 (
) = 100,9
2 ∙ 4,47 ∙ 4,28
𝑥𝑛(к)
𝑟𝑛(к) =
𝑐𝑜𝑠 (𝑎𝑟𝑐𝑡𝑎𝑛 (
𝑟𝑛 =
𝑟к =
𝑦𝑛(к)
𝑥𝑛(к) ))
3
0
𝑐𝑜𝑠 (𝑎𝑟𝑐𝑡𝑎𝑛 ( ))
3
6
3
𝑐𝑜𝑠 (𝑎𝑟𝑐𝑡𝑎𝑛 ( ))
6
=3
= 6,71
За умови суміщення циклів повороту ланок стріли маніпулятора,
розраховуються середні кутові швидкості ланок, с-1 :
𝜔𝛼 =
∆𝛼 ∙ 𝜋
1,09 ∙ 𝜋
=
= 0,002
180 ∙ 𝑡ц 180 ∙ 8,75
𝜔𝛽 =
∆𝛽 ∙ 𝜋
1,09 ∙ 𝜋
=
= 0,12
180 ∙ 𝑡ц 180 ∙ 8,75
Найбільший статичний момент руху ланок стріли маніпулятора, кН.м:
- для рукояті
𝑀𝑐𝑚2 = 𝑔𝑙2 [𝑚ван + 𝑚РО + 0,5𝑚2 ](1 + 𝑘тр )
𝑀𝑐𝑚2 = 9,81 ∙ 4,28 ∙ [3,76 + 4,88 + 0,5 ∙ 0,35](1 + 0,1) = 843,71
- для підйомної стріли
𝑀𝑐𝑚1 = 𝑔[(𝑚в + 𝑚РО )(𝑙1 + 𝑙2 ) + 0,5𝑚1 𝑙1 + 𝑚2 (𝑙1 + 0,5𝑙2 )](1 + 𝑘тр )
𝑀𝑐𝑚1 = 9,81
∙ [(3,76 + 4,88)(4,47 + 4,28) + 0,5 ∙ 0,12 ∙ 4,47 + 0,35
∙ (4,47 + 0,5 ∙ 4,28)](1 + 0,1) = 425,18
де mРО – маса робочого органу, кг (прийняти mРО = (0,8...1,8) mван ); m1, m2 –
маси ланок маніпулятора, кг; mван – маса вантажу, кг; l1, l2 – розміри ланок, м;
kтр = 0,08…0,1 – коефіцієнт.
Динамічний моменту пуску, кН.м:
𝑀дин1 = 𝐽1
𝜔𝛼
0,002
= 677,38
= 1,14
𝑡𝑝
1,3
𝑀дин2 = 𝐽2
𝜔𝛽
0,12
= 159,87
= 14,73
𝑡𝑝
1,3
де рt – час розгону ланки маніпулятора, с.
Моменти інерції ланок маніпулятора, кг.м2 :
- для рукояті
𝐽2 = (𝑚ван + 𝑚РО + 0,25𝑚2 )𝑙22
𝐽2 = (3,76 + 4,88 + 0,25 ∙ 0,35) ∙ 4,282 = 159,87
- для підйомної стріли
𝐽1 = (𝑚ван + 𝑚РО )(𝑙1 + 𝑙2
)2
𝑙1 2
𝑙2 2
+ 𝑚1 ( ) + 𝑚2 (𝑙1 + )
2
2
4,47 2
4,28 2
𝐽1 = (3,76 + 4,88)(4,47 + 4,28) + 0,12 ∙ (
) + 0,35 ∙ (4,47 +
)
2
2
2
= 677,38
Розрахункова потужність гідравлічного приводу за ступенями
рухомості, кВт:
𝑁1 =
𝑁1 =
заг
(843,71 + 1,14) ∙ 0,002
= 2,05
0,9
𝑁2 =
𝑁2 =
(𝑀𝑐𝑚1 + 𝑀дин1 )𝜔𝛼
(𝑀𝑐𝑚2 + 𝑀дин2 )𝜔𝛽
заг
(425,18 + 14,73) ∙ 0,12
= 58,56
0,9
де заг.= 0,85…0,95 – ККД приводу маніпулятора.
За розрахованою потужністю із табл. 3.1 підбирається номінальний
тиск гідросистеми приводу
Таблиця 3.1
Залежність тиску від потужності приводу
Потужність,кВт
До 0,1
0,1…1
1…5
5…20
Більше 20
Тиск,МПа
1
1…6,3
6,3…10
10…16
32
Визначається найбільше навантаження на привідні гідроциліндри, Н:
𝐹1 = [(0,5𝑘1 𝐺1 + 𝑘2 𝐺2 + 𝐺ван )𝑙1 𝑐𝑜𝑠𝛼𝑚𝑖𝑛
− (0,5𝑘2 𝐺2 + 𝐺ван )𝑙2 𝑐𝑜𝑠(𝛼𝑚𝑖𝑛 + 𝛽𝑚𝑎𝑥 ) + 𝑀дин1 ] ∙ 1
𝐹1 = [(0,5 ∙ 1,2 ∙ 1,22 + 2 ∙ 3,42 + 36,85)4,47 ∙ cos(66,57)
− (0,5 ∙ 2 ∙ 3,42 + 36,85)4,28 ∙ 𝑐𝑜𝑠(66,57 + 100,09) + 1,14] ∙ 0,97
= 240,99
𝐹2 = [(0,5𝑘2 𝐺2 + 𝐺ван )𝑙2 + 𝑀дин2 ]
√𝑐 2 + 𝑑 2
𝑐∙𝑑
𝐹2 = [(0,5 ∙ 2 ∙ 3,42 + 36,85)4,28 + 14,73]
√2,87 + 1,082
= 184,78
2,87 ∙ 1,08
де min – мінімально допустимий кут опускання стріли при якому
забезпечуватиметься найбільший виліт, град; 1 – передавальна функція
1
1
√𝑎2 + 𝑏 2 + 2𝑎𝑏𝑐𝑜𝑠(𝛼𝑚𝑖𝑛 − 𝛼1 )
𝑎 ∙ 𝑏 ∙ 𝑠𝑖𝑛(𝛼𝑚𝑖𝑛 − 𝛼1 )
√1,042 + 1,92 + 2 ∙ 1,04 ∙ 1,9 ∙ 𝑐𝑜𝑠(66,57 − 0,27)
= 0,97
1,04 ∙ 1,9 ∙ 𝑠𝑖𝑛(66,57 − 0,27)
Визначається ефективна робоча площа поршнів привідних гідроциліндрів,м2:
𝑆1 =
1,2𝐹1
= 9,04
𝑃𝐻
𝑆2 =
1,2𝐹2
= 6,93
𝑃𝐻
де pн – номінальний тиск гідросистеми, Па.
Діаметри поршнів привідних гідроциліндрів, м:
- для схем зі штовхаючим штоком
4𝑆1
𝐷1 = √
= 3,39
𝜋
4𝑆2
𝐷2 = √
= 2,97
𝜋
- для схем з тягнучим штоком
4𝑆1
𝐷1 = √
= 4,05
0,7𝜋
4𝑆2
𝐷2 = √
= 3,55
0,7𝜋
Діаметр вісі кріплення циліндра, мм:
3 2𝐹 𝑙
1 вісі
𝑑вісі = √
= 80
0,4[𝜎−1 ]
де lвісі – довжина вісі, м (при попередніх розрахунках можна приймати
0,2…0,4 м, де більші значення для великих вантажопідйомностей).
Розраховується потрібна подача гідронасоса, який забезпечуватиме живлення
одночасно двох гідроциліндрів приводу стріли, л/хв:
𝑄𝑛 =
0,0612(𝑁1 + 𝑁2 )заг
= 0,17
𝑃𝑛
де pn – тиск в гідросистемі, МПа; N1, N2 – потужності на гідроциліндрах, Вт.
За додатком 1 вибирається стандартний гідронасос та визначається
частота обертання його вала, об/хв:
𝑛𝑛 = 1000𝑄𝑛 𝑐𝑚 /(𝑞𝑛 ∙ 𝑛 )
де qn – робочим об’єм, см3 ; Qn
ст
– подача гідронасоса, л/хв; n – об’ємний
ККД.
Крутний момент на валу гідронасоса, Н.м:
𝑀𝑛 = 0,159𝑞гн 𝑝𝑛 /гм
Розрахунок механізму повороту стріли маніпулятора
Розрахункова схема поворотної опори стріли маніпулятора для всіх
варіантів представлено на рис. 4.1 а. Кінематична схема механізму повороту
зображено на рис. 4.1 б. Порядок розрахунку повинен містити наступні
пункти.
Розраховується сила ваги стрілової системи маніпулятора з вантажем, Н:
𝐺м−в = (𝑚𝑀 + 𝑚)𝑔 = 41,5
де mм – маса маніпулятора, кг; m – задана вантажопідйомність, кг.
Визначається сумарний статичний перекидний момент, Н.м:
𝑀𝑛 = 𝐺ван 𝑥ван + 𝐺1 𝑥1 + 𝐺2 𝑥2 = 152,24
де xван , 1 x , 2 x – максимальні відстані між віссю обертання та відповідними
центрами тяжіння вантажу і стрілової системи; GВАН, G1, G2 – вага
відповідних елементів системи, Н.
Максимальні
відстані
між
віссю
обертання
та
елементами ваги визначаються із наступних співвідношень, м:
- для вантажу
𝑥ван = 𝑙1 𝑐𝑜𝑠𝛼𝑚𝑖𝑛 − 𝑙2 𝑐𝑜𝑠(𝛼𝑚𝑖𝑛 + 𝛽𝑚𝑎𝑥 ) = 5,94
- для рукояті
𝑥2 = 𝑙1 𝑐𝑜𝑠𝛼𝑚𝑖𝑛 − 0,5𝑙2 𝑐𝑜𝑠(𝛼𝑚𝑖𝑛 + 𝛽𝑚𝑎𝑥 ) = 0,89
- для підйомної стріли
𝑥1 = 0,5𝑙1 𝑐𝑜𝑠𝛼𝑚𝑖𝑛 = 0,89
відповідними
де l1 та l2 – розміри ланок, м. Для конструювання опорного вузла стійки
стріли маніпулятора розраховується перекидний момент М та вертикальне
навантаження V:
𝑀 = 1,2𝑀𝑛 = 183,04
𝑉 = 1,2𝐺𝑀−𝐵 = 49,80
Максимальне навантаження на підшипникову опору:
𝑀
= 261,49
АБ
де АБ – відстань між підшипниковими опорами стріли (АБ= 0,5…0,9 м).
𝑅𝐴 = 𝑅Б =
Згідно ГОСТ 27365-87 для опор А та Б підбираються радіальноупорні
роликові підшипники зі статичною вантажопідйомністю більшою за
визначене розрахункове навантаження.
Момент опору обертання від сили тертя при повороту стріли
кранаманіпулятора із максимальним вантажем, Н:
𝑀𝑇 = 0,5𝑤𝑉(𝐷1 + 𝐷2 ) + 𝑅𝐴 𝑤𝐷1 = 15,68
де w = 0,012…0,015 – коефіцієнт опору обертанню; D1 та D2 – зовнішні
діаметри підшипників опор А та Б, м. Момент від крену маніпулятора, Н:
𝑀𝛽 = 𝑀𝑛 𝑠𝑖𝑛𝜃 = 26,49
де θ = 10° – максимальний кут крену.
Кутова швидкість повороту стріли, с-1 :
𝜋𝑛пов
𝜔пов =
= 0,07
30
де частота обертання маніпулятора приймається nпов 0,6…0,8 хв-1 .
Момент від сил інерції маси маніпулятора та вантажу:
𝑀ін =
𝐼𝜔пов
= 8,16
𝑡𝑛
де tп – час розгону механізму, с; І – момент інерції стріли з вантажем
номінальної маси, кг.м2 ;
𝐼=
2
𝑚ван 𝑥ван
(𝑙1 + 𝑙2 )2
+ (𝑚1 + 𝑚2 )
= 144,7
3
де xван – максимальна відстань між віссю обертання стріли та вантажем, м.
Необхідна потужність приводу, кВт:
𝑁пов =
(𝑀𝑇 𝑀𝛽 𝑀ін )𝜔пов
= 4,1
де = 0,85…0,9 – загальний ККД приводу.
За розрахованою потужністю приводу механізму повороту підібрати
стандартний гідромотор за додатком 2.
МР450
Розраховується максимальний момент на валу гідромотора, Н.м:
𝑀ГМ = 0,159𝑞гм 𝑝н об = 0,159 ∙ 452 ∙ 21 ∙ 140 = 10,78
де qгм – робочий об’єм гідромотора, см3 ; нp – тиск в гідросистемі, МПа; об –
об’ємний ККД гідромотора.
Загальне передавальне відношення приводу:
𝑢=
(𝑀𝑇 +𝑀𝛽 +𝑀ін ) (9,29 ∙ 10,04 ∙ 5,7)0,9
=
= 2,09
𝑀ГМ
10,78
де МГМ – обертальний момент на валу гідромотора, Н.м.
Задаючись передавальним відношенням циліндричної передачі ц.п. u
визначається передавальне відношення редуктора:
𝑢ч.р =
Необхідна подача,
гідромотора, л/хв:
𝑄𝐻 =
яку
𝑢
2,09
=
= 0,7
𝑢ц.п
3
потрібно
забезпечити
для
живлення
𝑛пов ∙ 𝑢 ∙ 𝑞гм 0,7 ∙ 2,09 ∙ 452
=
= 10
1000 ∙ об
1000 ∙ 140
де nпов – частота повороту стійки, об/хв; u – загальне передавальне
відношення приводу; qгм – робочий об’єм гідромотора, см3 .