Кинематика и динамика упругого столкновения частиц. Переход в Ц-систему. Импульсные диаграммы. Связь углов рассеяния в Л- и Ц-системах
реклама

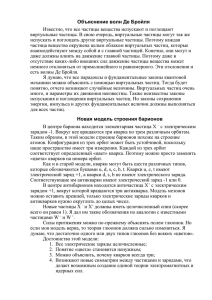
Лекция 11. Кинематика и динамика упругого столкновения частиц. Переход в Ц-систему. Импульсные диаграммы. Связь углов рассеяния в Л- и Ц-системах Столкновение двух частиц называется упругим, если оно не сопровождается изменением их внутреннего состояния, в том числе не изменяется их внутренняя энергия. Термин "столкновение" предполагает, что взаимодействие между частицами происходит в течение какого-то ограниченного времени, после чего частицы движутся как свободные. Процесс упругого столкновения можно проанализировать в рамках законов сохранения энергии и импульса. Эти результаты получались и подробно исследовались в курсе общей физики. Здесь мы интерпретируем их графически с помощью так называемых импульсных диаграмм. Ограничимся подробным рассмотрением простого, но важного и часто встречающегося случая, когда вторая частица до столкновения покоилась (в общем случае формулы очень громоздки), т.е. v2 0 , p2 0 (1) В этом случае импульс системы и относительный импульс определяются импульсом первого тела P p1 p2 p1 и vî ò í v1 v2 v1 p1 m1 (2) Тогда импульсы те в системе центра инерции до и после столкновения равны: p1ц p1 , m1 p2ц p1 m1 (3) p1ц p1n0 , m1 p1ц p1n0 m1 (4) ( - приведенная масса). Кинетическая энергия в Ц-системе v12 Tц T1ц T2ц 2 (5) Тогда формулы для импульсов тел в Л-системе после столкновения можно записать в виде: p1 p1n0 p1 p1ö p1 m1 m2 m2 p2 p1n0 p1 p2 ö p1 m1 m1 m1 1 (6) (7) Рассмотрим три случая, которые отличаются друг от друга соотношением масс частиц m 1 и m2 . 1. Налетающая частица m 1 легче покоящейся частицы m 2 , т.е. m1 m 2 Проведем следующие построения (См. рисунок). Отложим отрезок C AO p1 . m2 Из точки O отложим OB p1 . Тогда очевидно, что отрезок m1 p1 отрезок частицы до 2 1 A AB будет представлять собой импульс налетающей p 2 B O столкновения: D AB p1 . Из точки O проведем окружность радиусом OB . Точка B будет лежать на этой окружности, а точка A будет находиться внутри круга, т.к. при m1 m 2 AO OB . Заметим, что отре- Рис. 1 Импульсная диаграмма столкновения частиц для случая m1 m 2 . зок OB p1ц , т.е. одновременно представ- ляет собой импульс налетающей частицы в Ц - системе. Рассмотрим на окружности произвольную точку C . Отрезок OC можно рассматривать , т.к. OC OB . как импульс первой частицы после столкновения в Ц - системе: OC p1ц Следовательно, угол есть угол поворота первой частицы в Ц – системе. Тогда отрезок AC есть импульс первой частицы после столкновения в Л – системе: AC OC AO p1 . Одновременно, CB есть импульс второй частицы после столкновения в Л – системе: CB OB OC p2 . Т.о. на одной векторной диаграмме удается одновременно представить векторы импульсов частиц до и после столкновений как в Л – системе, так и в Ц – системе. Именно это обстоятельство делает векторные импульсные диаграммы исключительно наглядными и позволяет установить из них связь между различными величинами в Л – и в Ц – системах. Например, из диаграммы сразу видно, что угол отклонения 1 первой частицы в Л – систе2 ме может изменяться во всем интервале 0 1 , а угол отклонения 2 второй частицы в Л – системе может изменяться в интервале 0 2 / 2 . Видно, что 2 0 , когда 1 , что имеет место при . При этом частицы разлетаются в разные стороны вдоль одной прямой: p1x 0 , а p 2x 0 . Это соответствует "лобовому" столкновению частиц. При 0 , 1 0 . При этом p1 p1 , а p2 p2 0 . Это соответствует отсутствию столкновения частиц. Установим связь между углами отклонения частиц 1 и 2 в Л – системе и углом поворота в Ц – системе. Углы 1 и 2 представляют собой углы отклонения частиц после столкновения по отношению к направлению удара, т.е. по отношению к вектору налетающей частицы p1 , т.е. по отношению к отрезку AB на рисунке. Сначала установим связь между углами 2 и . Поскольку треугольник OBC равнобедренный, то 22 . Отсюда сразу получаем, что 2 2 (8) Теперь установим связь между углами 1 и . Из рисунка следуют соотношения: tg1 Поскольку OB CD OC sin OC sin OB sin AD AO OD AO OC cos AO OB cos p1 , а AO p1 , то получаем m1 m2 tg1 sin sin . AO / OB cos m1 / m 2 cos Эту формулу обычно записывают в виде: tg1 Угол ACB / 2 , т.к. m 2 sin sin m1 m 2 cos k cos точка A лежит внутри (9) круга. Поскольку 1 2 ACB , то при m1 m 2 угол разлета частиц m 1 и m 2 после столкновения меньше чем / 2: m1 m2 1 2 / 2 , 3 (10) Рассмотрим случай "лобового" удара. Из диаграммы 1 видно, что в этом случае налетающая частица m 1 полетит в сторону, противоположную её начальному направлению движения: p1 p1 . Точка C будет находиться на одном диаметре окружности слева от точки B . Т.е. при "лобовом" столкновении . Поэтому p1 AO OB , т.е. 1 1 p1 AO OB p1 , m m 1 2 т.е. p1 m1 m 2 p1 m1 m 2 (11) v1 p1 m m2 1 v1 m1 m1 m 2 (12) Следовательно Для покоящейся частицы при "лобовом" ударе p2 CB 2OB , т.е. p2 2 m2 p1 m1 m 2 (13) Следовательно, v2 p2 2m1 v1 m2 m1 m 2 (14) Если частица m 2 до столкновения покоилась, то наибольшую энергию, которую может потерять налетающая частица, будет равна энергии, приобретенной второй частицей именно после "лобового" столкновения: T1 max T1 T1max T2 max T2 (15) Используя формулу (15) легко получаем: T1 max Здесь T1 T2 max m2 4m1m 2 4k 2 v2 T T 1 2 2 2 1 k m1 m 2 (16) m1 2 v1 - первоначальная энергия налетающей частицы. 2 Рассмотрим случай, когда налетающая частица m 1 тяжелее покоящейся частицы m 2 , т.е. m1 m 2 . В этом случае построение векторной импульсной диаграммы производится ана4 логично тому, как это делалось выше для случая m1 m 2 . Отличие будет состоять только в том, что теперь точка A будет лежать вне круга радиуса OB AO p1 , т.к. длина отрезка m1 p1 будет больше OB , поскольку m 2 m1 (рис.10.6). m2 E 1max C p 2 2 p1 n0 B O A 1 D Рис.2. Импульсная диаграмма столкновения частиц для случая m1 m 2 . Такое, казалось бы, не столь большое отличие, приводит, однако, к существенному изменению результата взаимодействия частиц, по сравнению с рассмотренным выше случаем m1 m 2 . В то время, как при m1 m 2 скорость первой частицы после столкновения могла иметь любое направление 0 1 , теперь угол отклонения налетающей частицы m 1 не может превышать некоторого максимального значения 1max , так, что при m1 m 2 величина 1 может изменяться в пределах: 0 1 1max . Значение угла 1max может легко определено из векторной диаграммы 2. Максимальному отклонению первой частицы в Л – системе соответствует такое положение точки C , при котором прямая AС касается окружности в точке E. Поскольку треугольник AEO – прямоугольный, то sin 1max 5 OE OB . AO AO Поскольку OB p1 , а AO p1 , то сразу получаем, что m1 m2 sin 1max m2 m1 (17) Значению угла 1max соответствует угол поворота в Ц – системе / 2 1max , так, что cos m2 . m1 Обсудим значение угла разлета. Теперь угол ACB / 2 , т.к. точка A лежит вне круга. Поскольку 1 2 ACB , то при m1 m 2 угол разлета частиц m 1 и m 2 после столкновения больше чем / 2: m1 m2 1 2 / 2 , (18) Кроме того, как это видно из диаграммы 2, одному и тому же значению угла 1 1max будет соответствовать два различных значения угла в Ц – системе, т.к. прямая AC пересекает окружность в двух точках. Но это означает, что одному и тому же углу отклонения 1 будет соответствовать две различные пары значений импульсов p1 ; p2 1 C и p1 p1 ; p2 2 . Кроме того, одному и тому n0 же углу отклонения 1 будет соответствовать два различных значения угла p 2 1 2 A B 2 . O D Пусть теперь налетающая и покоящаяся частицы имеют одинаковую массу, т.е. m 1 m 2 m , так, что m / 2. В этом случае векторная диаграмма имеет наиболее простой вид, p т.к. отрезки OB p1 1 m1 2 Рис. 3. Импульсная диаграмма столкновения частиц для случая m1 m 2 . и 6 AO p p1 1 оказываются равными. Поэтому точки A и B будут лежать на противоm2 2 положных концах диаметра (рис.3). B этом случае треугольник AOB является равнобедренным. Поэтому 21 . Следовательно, в случае частиц равных масс получаем: 1 ; 2 2 ; 2 m1 m2 (19) Формула (19) для угла 1 получается конечно из общей формулы, если в ней положить m1 m 2 m : tg1 2sin / 2 cos / 2 m sin sin tg / 2 m m cos 1 cos 2cos2 / 2 Одинаковые частицы всегда разлетаются под прямым углом друг к другу. Это видно как из диаграммы 3, так и непосредственно из формул (19): 1 2 2 7 (20)