Министерство образования и науки Российской Федерации
Федеральное государственное автономное образовательное
учреждение высшего профессионального образования
«Южно-Уральский государственный университет
(национальный исследовательский университет)»
Политехнический институт
Заочный факультет
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К СЕМЕСТРОВОЙ РАБОТЕ
по дисциплине «Моделирование систем»
ФГАОУ ВО ЮУрГУ (НИУ)–09.03.01.2018.034 ПЗ КП
Вариант № 20
Нормоконтролер, ст. преп. каф.
«Системы автоматического
управления»
____________ В.П. Щербаков
«____» ____________ 2018 г.
Руководитель, ст. преп. каф.
«Системы автоматического
управления»
____________ В.П. Щербаков
«____» ____________ 2018 г.
Автор проекта
студент группы ПЗ–397
____________ Д.Н. Челмакин
«____» ____________ 2018 г.
Проект защищен с оценкой
_______________________
«____» ____________ 2018 г.
Челябинск
2018
Задание 1. Моделирование линейной стационарной системы, заданной
структурной схемой
Структурная схема системы
Рис. 1.1. Структурная схема системы
Данные
0. 0,02
1. W01
2. K
3. W02
4. W02
5. K
6. K
7. S
G. K
План решения
1. Подставим данные в структурную схему
Рис. 1.2. Структурная схема системы с подставленными данными
2. Выполним сквозную нумерацию звеньев и выходных сигналов
Рис. 1.3. Структурная схема с пронумерованными звеньями и выходными
сигналами
3. Составим описание элементов системы
1 - (Y4, {x11}, Y1);
2 - (Y5, {x21, x22}, Y2);
3 - (Y8, {x31, x32},Y3);
4 - (Y9, Y4);
5 - (Y1, Y5);
6 - (Y2, Y6);
7 - (Y6, Y7);
8 - (Y1, Y8);
9 - ({+Y7, -Y3, +G}, Y9);
4. Составим матричную математическую модель.
𝑥11 𝑥21 𝑥22 𝑥31 𝑥32 𝑦1
1 зв
0
3 зв
𝑥̇ 11
𝑥̇ 21
𝑥̇ 22
𝑥̇ 31
𝑥̇ 32
1 зв
0
1
2 зв
0
2 зв
2 зв
3 зв
3 зв
0
4 зв
0
5 зв
0
6 зв
0
7 зв
0
8 зв
0
9 зв
0
𝑦2
𝑦3
−𝑎10
0
−𝑎02
1
0
−𝑎12
0
−𝑎03
1
0
−𝑎13
−𝑎11
𝑦7
𝑦8
𝑦9
1(t)
𝑏03
0
0
−𝑎22
0
𝑦6
𝑏02
0
0
1
𝑦5
𝑏01
0
0
𝑦4
0
−𝑎23
1
0
0.02
-1
K1
-1
S
-1
K3
K2
-1
-1
-1
+1
-1
+К4
По верхней части матричной математической модели путем перемножения матриц
записываем систему дифференциальных уравнений:
𝑥̇ 11 = −𝑦1 𝑎10 + 𝑦4 𝑏10
𝑥̇ 21 = −𝑦2 𝑎20 + 𝑦5 𝑏20
𝑥̇ 22 = 𝑥21 − 𝑦2 𝑎21
𝑥̇ 31 = −𝑦3 𝑎30 + 𝑦8 𝑏30
𝑥̇ 32 = 𝑥31 − 𝑦3 𝑎31
По нижней части матричной математической модели путем перемножения матриц
записываем систему алгебраических уравнений:
0 = 𝑥11 − 𝑦1 𝑎11
0 = 𝑥22 − 𝑦2 𝑎22
0 = 𝑥32 − 𝑦3 𝑎32
0 = −𝑦4 + 0.02𝑦9
0 = K1𝑦1 − 𝑦5
0 = S𝑦2 − 𝑦6
0 = K3𝑦6 −𝑦7
0 = K2𝑦1 − 𝑦8
0 = −𝑦3 + 𝑦6 − 𝑦9 + K4
5. Выберем параметры звеньев.
Случайным образом подбираем параметры звеньев системы (кроме звена S,
параметр которого задан), учитывая что:
b0
a0 + a1 s
b0
=
a0 + a1 s + a2 s 2
W01 =
W02
𝑏01 = 𝑏02 = 𝑏03 = 3
𝑎01 = 𝑎02 = 𝑎03 = 100
𝑎11 = 𝑎12 = 𝑎13 = 14
𝑎22 = 𝑎23 = 1
К1 = 0,3
К2 = 0,2
К3 = 0,1
К4 = 4
S = 100/20 = 0,2
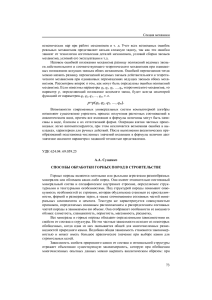
6. Построим модель системы и ее график в SimACS.
Рис. 1.4. Модель системы в SimACS.
Рис. 1.5. Графики всех звеньев в SimACS.
Рис. 1.6. Переходная характеристика.
Это говорит о том, что параметры подобраны верно, система устойчива.
7. Проведем анализ системы при 𝑡 = 0 и при 𝑡 = +∞
Рис. 1.7. Структурная схема исследуемой системы в начальный момент
Y = 4 ((((W4W1/(1+ W4W1W3W8))W5W2)))/(((1- ((W4W1/(1+
+W4W1W3W8))W5W2)))W7W6))))
При 𝑡 = 0
Y = 4((((0,02*0/(1+0,02*0*0*0,2))*0,3*0)))/
/((( 0,02*0/(1+0,02*0*0*0,2))*0,3*0)))*0,1*0,2)))) = 0
Y = Y2 = 0
Y2 = W2*Y5 => Y5 = Y2/W2 = 0/W2 = 0
Y5 = W5*Y1 = 0,3*Y1 => Y1 = 0/0,3 = 0
Y8 = W8*Y1 = 0*0,2 = 0
Y3 = W3*Y8 = 0*0 = 0
Y6 = W6*Y2 = 0*0,2 = 0
Y7 = W7*Y6 = 0*0,1 = 0
Y9 = Y7 + 4 – Y3 = 4
Y4 = W4*Y9 = 0,02*4 = 0,08
Рис. 1.8. Структурная схема исследуемой системы в конечный момент
Y = 4 ((((W4W1/(1+ W4W1W3W8))W5W2)))/(((1- ((W4W1/(1+
+W4W1W3W8))W5W2)))W7W6))))
При 𝑡 = +∞
Y = 4 ((((0,02*0,03/(1+(0,02*0,03*0,2*0,03))*0,3*0,03)))/
/(((1-((0,02*0,03)/(1+0,02*0,03*0,2*0,03)*0,3*0,03))*0,1*0,2 = 4 ∗
6∗10−4 ∗9∗10−3
1−(1,07999∗10−7 )
= 4*5,39999 ∗ 10−6 = 2,15996∗ 10−5
Y = Y2 = 2,15996∗ 10−5
Y2 = W2*Y5 => Y5 = Y2/W2 = 2,15996∗ 10−5 /0,03 = 7,19987*10−4
Y5 = W5*Y1 = 0,3*Y1 => Y1 = 7,19987*10−4 /0,3 = 2,399956*10−3
Y1 = W1*Y4 => Y4 = Y1/W1 = 2,399956*10−3 /0,03 = 7,999853*10−2
Y8 = W8*Y1 = 0,2*2,399956*10−3 = 4,799911*10−4
Y3 = W3*Y8 = 0,03*4,799911*10−4 = 1,43997*10−5
Y6 = W6*Y2 = 0,2*2,15996∗ 10−5 = 4,31992*10−6
Y7 = W7*Y6 = 0,1*4,31992*10−6 = 4,31992*10−7
Y9 = Y7 + 4 – Y3 = 4,31992*10−7 + 4 – 1,43997*10−5 = 3,999986
=
8. Сравним значения выходов звеньев, полученных в п. 5, с теорией.
Сравнение значений выходов звеньев, полученных в Acsocad с теорией
𝑡=0
Сигнал
системы
Y1
Y2
Y3
Y4
Y5
Y6
Y7
Y8
Y9
Acsocad
Теория
0
0
0
0
0
0
0,07999999 7,999853*10−2
0
0
0
0
0
0
0
0
4
4
Вывод
совпадает
совпадает
совпадает
погрешность минимальна
совпадает
совпадает
совпадает
совпадает
совпадает
Сравнение значений выходов звеньев, полученных в Acsocad с теорией
при 𝑡 = +∞
Сигнал
системы
Y1
Y2
Y3
Y4
Y5
Y6
Y7
Y8
Y9
Acsocad
Теория
0,00239999
2,399956*10−3
0,0000215999
2,15996∗ 10−5
0,0000143999
1,43997*10−5
0,07999972
7,999853**10−2
0,0007199975
7,19987*10−4
0,00000431998
4,31992*10−6
0,000000431998 4,31992*10−7
0,000479998
4,799911*10−4
3,9999859
3,999986
Вывод
погрешность минимальна
погрешность минимальна
погрешность минимальна
погрешность минимальна
погрешность минимальна
погрешность минимальна
погрешность минимальна
погрешность минимальна
погрешность минимальна
при
Задание 2. Моделирование нелинейной нестационарной системы, заданной
структурной схемой.
Структурная схема системы
Рис. 2.1. Структурная схема системы
Данные
1. N1
2. 0,05
3. W01
4. T1
5. W02
6. T1
7. T1
8. S
G. G1
План решения
1. Подставим данные в структурную схему
Рис. 2.2. Структурная схема системы с подставленными данными
2. Выполним сквозную нумерацию звеньев и выходных сигналов
Рис. 2.3. Структурная схема с пронумерованными звеньями и выходными
сигналами
3. Составим описание элементов системы
1 - (Y3, {x11}, Y1);
2 - (Y5, {x21, x22}, Y2);
3 - (Y9, Y3);
4 - (Y1, Y4);
5 - (Y3, Y5);
6 - (Y4, Y6);
7 - (Y6, Y7);
8 - ({+Y7, -Y2, +G1}, Y8);
9 - (Y8, Y9);
4. Составим матричную математическую модель.
𝑥11 𝑥21 𝑥22 𝑦1
0
2 зв
𝑥̇ 11
𝑥̇ 21
𝑥̇ 22
1 зв
0
1
2 зв
0
3 зв
0
4 зв
0
5 зв
0
6 зв
0
7 зв
0
8 зв
0
9 зв
0
1 зв
2 зв
𝑦2
−𝑎10
𝑦4
0
−𝑎02
1
0
−𝑎12
−𝑎11
𝑦6
𝑦7
𝑦8
𝑦9
1(t)
𝑏02
0
−𝑎22
1
𝑦5
𝑏01
0
0
𝑦3
0
-1
T1
0,05
-1
T1
-1
S
-1
T1
-1
-1
+1
+𝐺1
-1
N1 (y9 )
y9
-1
По верхней части матричной математической модели путем перемножения матриц
записываем систему дифференциальных уравнений:
𝑥̇ 11 = −𝑦1 𝑎10 + 𝑦3 𝑏10
𝑥̇ 21 = −𝑦2 𝑎20 + 𝑦5 𝑏20
𝑥̇ 22 = 𝑥21 − 𝑦2 𝑎21
По нижней части матричной математической модели путем перемножения матриц
записываем систему алгебраических уравнений:
0 = 𝑥11 − 𝑦1 𝑎11
0 = 𝑥22 − 𝑦2 𝑎22
0 = −𝑦3 + 0,05𝑦9
0 = Т1𝑦1 − 𝑦4
0 = Т1𝑦3 − 𝑦5
0 = S𝑦4 − 𝑦6
0 = Т1𝑦6 −𝑦7
0 = −𝑦2 + 𝑦7 − 𝑦8 + G1
0=
N1 (y9 )
y9
𝑦8 − 𝑦9
5. Выберем параметры звеньев.
Случайным образом подбираем параметры звеньев системы (кроме звена S,
параметр которого задан), учитывая что:
b0
a0 + a1 s
b0
=
a0 + a1 s + a2 s 2
W01 =
W02
𝑏01 = 𝑏02 = 3
𝑎01 = 𝑎02 = 100
𝑎11 = 𝑎12 = 14
𝑎22 = 1
2; t < 3
T1 =
1; t >= 5 U t <5
2; t >= 5
1; t < 3
G1 =
2; t >= 3
9U/3; U<3
N1 =
9; U>=3
S = 100/20 = 0,2
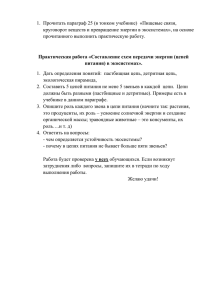
6. Построим модель системы и ее график в SimACS.
Рис. 2.4. Модель системы в SimACS.
Рис. 2.5. Графики всех звеньев в SimACS.
Рис. 2.6. Переходная характеристика.
Это говорит о том, что параметры подобраны верно, система устойчива.
7. Проведем анализ системы при 𝑡 = 0 и при 𝑡 = +∞
Рис. 2.7. Структурная схема исследуемой системы в начальный момент
Y = G1 ((((W9W3/(1+ W2W5W9W3))W1W4)))/(((1- ((W9W3/(1+
+W2W5W9W3))W1W4W7W6))))
При 𝑡 = 0
Y = 1*((((3*0.05/1+0*2*3*0,05))*0*0,2))/1-((3*0.05/1+0*2*3*0,05))*0*2*0,2*2))) = 0
Y = Y4 = 0
Y2 = W2*Y5 = 0
Y4 = W4*Y1 = 2*Y1 => Y1 = 0/2 = 0
Y6 = W6*Y4 = 0,2*0 = 0
Y7 = W7*Y6 = 2*0 = 0
Y8 = Y7 + 1 – Y2 = 0 + 1 - 0 = 1
Y9 = W9*Y8 = 3*1 = 3
Y3 = W3*Y9 = 0,05*3 = 0,15
Y5 = W5*Y3= 2*0,15 = 0,3
Рис. 2.8. Структурная схема исследуемой системы в конечный момент
Y = G1 ((((W9W3/(1+ (W2W5W9W3))W1W4)))/(((1- ((W9W3/(1+
+(W2W5W9W3))W1W4W7W6))))
При 𝑡 = +∞
Y = 2*((((9*0,05/(1+(0,03*2*9*0,05))*0,03*2)))/(((1((9*0,05/(1+(0,03*2*9*0,05)))*0,03*2*0,2*2)))) = 5,31*10−2
Y = Y4 = 5,31*10−2
Сравнение значений выходов звеньев, полученных в Acsocad с теорией
𝑡 = +∞
Сигнал
системы
Acsocad
Y1
Y2
Y3
Y4
Y5
Y6
Y7
Y8
Y9
0,008999999
0,008999999
0,00449999
0,008999999
0,3
0,001799999
0,003599999
1,9946
3,0
Теория
0,053139
Вывод
при
Задание 3. Моделирование линейной стационарной системы, заданной
структурной схемой
Структурная схема системы
Рис. 3.1. Структурная схема системы
Данные
1. S
2. 0,31
3. W02
4. K1
5. K1
6. W01
7. W12
8. K2
9. K2
10.W12
11.K3
12.K3
13.K3
14.K1
G1. K1
G2. K2
План решения
1. Подставим данные в структурную схему
Рис. 3.2. Структурная схема системы с подставленными данными
2. Выполним сквозную нумерацию звеньев и выходных сигналов
Рис. 3.3. Пронумерованная структурная схема системы
3. Составим описание элементов системы
1 – (Y6, {x11, x12}, Y1);
2 – (Y8, {x21}, Y2);
3 – (Y2, {x31, x32}, Y3);
4 – (Y11, {x41, x42}, Y4);
5 – (+G1, Y5);
6 – (Y15, Y6);
7 – (Y17, Y7);
8 – (Y7, Y8);
9 – (Y8, Y9);
10 – (Y9, Y10);
11 – (Y3, Y11);
12 – (Y3, Y12);
13 – (Y12, Y13);
14 – (+G1, Y14);
15 – ({+Y5, -Y4}, Y15);
16 – ({+G2, +Y1, -Y14}, Y16);
17 – ({+Y16, -Y10, +Y13}, Y17);
4. Составим матричную математическую модель
1 зв
2 зв
2 зв
3 зв
3 зв
4 зв
4 зв
1 зв
2 зв
3 зв
4 зв
5 зв
6 зв
7 зв
8 зв
9 зв
10 зв
11 зв
12 зв
13 зв
14 зв
15 зв
16 зв
17 зв
𝑥̇ 11
𝑥̇ 12
𝑥̇ 21
𝑥̇ 31
𝑥̇ 32
𝑥̇ 41
𝑥̇ 42
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
𝑥̇ 11
0
1
𝑥̇ 12
0
0
𝑥̇ 21
𝑥̇ 31
𝑥̇ 32
𝑥̇ 41
𝑥̇ 42
0
0
1
0
0
0
1
0
0
0
1
1
0
1
0
1
Y1
Y2
Y3
Y4
Y5
−𝑎10
−𝑎11
−𝑎02
𝑏03 −𝑎03
𝑏13 −𝑎13
−𝑎04
−𝑎14
−𝑎12
−𝑎12
0
−𝑎23
−𝑎24
-1
Y6
𝑏01
0
Y7
Y8
Y9
Y10
Y11
Y12
Y13
Y14
Y15
Y16
Y17
1(t)
𝑏02
𝑏04
𝑏14
0
0
0
S
-1
0.31
-1
K1
K1
-1
K2
-1
K2
-1
K3
K3
-1
-1
K3
-1
-1
-1
+1
K1
-1
+1
-1
-1
+1
-1
+1
G2
-1
По верхней части матричной математической модели путем перемножения матриц
записываем систему дифференциальных уравнений:
𝑥̇ 11 = −𝑦1 𝑎10 + 𝑦6 𝑏10
𝑥̇ 12 = 𝑥11 − 𝑦1 𝑎11 + 𝑦5 𝑏20
𝑥̇ 21 = −𝑦2 𝑎20 + 𝑦8 𝑏02
𝑥̇ 31 = −𝑦3 𝑎30
𝑥̇ 32 = 𝑥31 + 𝑦2 𝑏31 𝑦2 𝑏30 − 𝑦3 𝑎31
𝑥̇ 41 = −𝑦4 𝑎40 + 𝑦11 𝑏40
𝑥̇ 42 = 𝑥41 −𝑦4 𝑎41 + 𝑦11 𝑏41
По нижней части матричной математической модели путем перемножения матриц
записываем систему алгебраических уравнений:
0 = 𝑥12 − 𝑦1 𝑎12
0 = 𝑥21 − 𝑦2 𝑎21
0 = 𝑥32 − 𝑦3 𝑎32
0 = 𝑥42 − 𝑦4 𝑎42
0 = −𝑦5 + 𝑆
0 = −𝑦6 + 0,31
0 = −𝑦7 + К1
0 = К1𝑦7 − 𝑦8
0 = К2𝑦8 − 𝑦9
0 = К2𝑦9 − 𝑦10
0 = К3𝑦3 − 𝑦11
0 = К3𝑦3 − 𝑦12
0 = К3𝑦12 − 𝑦13
0 = −𝑦14 + К1
0 = −𝑦4 + 𝑦5 − 𝑦15
0 = 𝑦1 + 𝑦14 − 𝑦16 + G2
0 = −𝑦10 + 𝑦13 + 𝑦16 − 𝑦17
5. Выберем параметры звеньев.
Случайным образом подбираем параметры звеньев системы (кроме звена S,
параметр которого задан), учитывая что:
W12 =
W02 =
W01 =
𝑏01 =
b0 +b1 s
a0 +a1 s+a2 s2
b0
;
a0 +a1 s+a2 s2
b0
;
;
a0 +a1 s
2
𝑏0 = 𝑏03
= 𝑏04 = 3
𝑏13 = 𝑏14 = 2
𝑎01 = 𝑎02 = 𝑎03 = 𝑎04 = 100
𝑎11 = 𝑎12 = 𝑎13 = 𝑎14 = 14
𝑎21 = 𝑎23 = 𝑎24 = 1
S=0,2
К1 = 1
К2 = 2
К3 = 3
G1 = K1 = 1
G2 = K2 = 2
S = 100/20 = 0,2
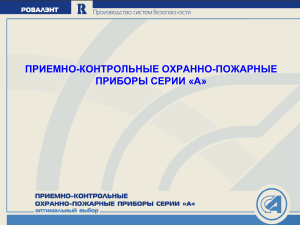
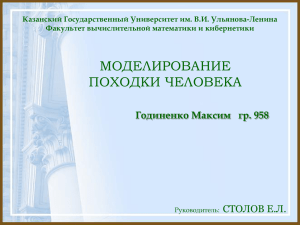
6. Построим модель системы и ее график в SimACS.
Рис. 3.4. Модель системы в SimACS.
Рис. 3.5. Графики всех звеньев в SimACS.
Рис. 3.6. Переходная характеристика.
Это говорит о том, что параметры подобраны верно, система устойчива.