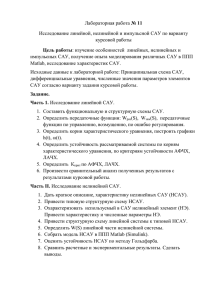
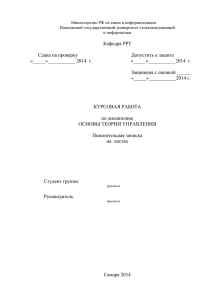
Федеральное агентство связи Федеральное государственное бюджетное образовательное учреждение высшего образования «Поволжский государственный университет телекоммуникаций и информатики» _____________________________________________________________________________ Кафедра радиоэлектронных систем МЕТОДИЧЕСКИЕ УКАЗАНИЯ к лабораторной работе №1 «Исследование динамических ошибок в следящей САУ» по учебной дисциплине «Теория автоматического управления» Для магистрантов направления подготовки: - Управление в технических системах Составил: Профессор кафедры РЭС ПГУТИ Тяжев А.И. Лабораторная работа №1 «Исследование динамических ошибок в следящей САУ» Цель работы Рассчитать параметры двух корректирующих звеньев: коэффициент усиления kкз и постоянные времени T1 и Т2 в системе автоматического управления (САУ), осуществляющей с заданной точностью автоматическое слежение антенны за объектом, перемещающимся в пространстве и излучающим электромагнитные волны. Численные значения ошибок слежения и других показателей САУ определяются значениями предпоследней N1 и последней N 0 цифр зачетной книжки студента. Структурная схема САУ: РПУ – радиоприемное устройство, ФД – фазовый детектор, КЗ – первое корректирующее звено, УМ – усилитель мощности, ЭД – электродвигатель, А – антенна, МОС – местная обратная связь, выполняющая роль второго корректирующего звена, x ц - азимут цели (объекта), у а - азимут антенны, е х у - ошибка слежения. Исходные данные для расчета: 1. Допустимые ошибки слежения САУ: а) по положению е0 0 , е1 0.15 0.01 N1 0.01 N 0 , б) по скорости в) по ускорению е2 0.6 0.01 N1 0.01 N 0 при где ц 10 , c t ц t 2 ц t 2 20 c2 , - скорость отклонения объекта, 2 ц t 2 - ускорение отклонения объекта. 2. Полоса пропускания САУ: п 75 0.6 N1 1.2 N 0 (c 1 ) 3. Показатель колебательности САУ: Wз ( р ) М 1.35 0.03 N1 при N 0 - четной, Wз ( р ) М 1.38 0.02 N1 при N 0 - нечетной 4. Передаточные функции и параметры звеньев исходной части САУ: WРПУ k РПУ , 1 рТ РПУ WУМ WФД k ФД 1 рТ ФД , k ЭДА kУМ , WЭДА , р (1 рТ ЭДА ) 1 рТ УМ k РПУ k ФД 5 мВ , kУМ 100 , k ЭДА 8 1 , сВ Т РПУ Т ФД Т УМ 5 мс , Т ЭДА 12 мс 0.2 мс N1 0.2 мс N 0 , Литература 1. Тяжев А.И. Теория автоматического управления. Электронная версия. Самара: НТБ ПГУТИ-2016. -164 с. 2. Тяжев А.И. Конспект лекций по дисциплине автоматического управления». Учебник «Теория Контрольные вопросы 1. Какие преимущества дает преобразование Лапласа для описания САУ? 2. Приведите формулу для прямого преобразования Лапласа и примените ее для единичного скачка. 3. Что такое передаточная функция звена, устройства или системы? 4. Что такое сигнал ошибки в следящей САУ и что такое передаточная функция ошибки? 5. Как связана передаточная функция ошибки с передаточными функциями замкнутой и разомкнутой систем? 6. При каком входном сигнале в следящей САУ определяется статическая ошибка, а при каком – динамические ошибки? 7. Напишите выражение для определения динамических ошибок в следящей САУ. 8. В каких случаях электродвигатель выполняет функции интегратора (является инерционно-интегрирующим звеном), а в каких – не выполняет (является только инерционным звеном)? 9. С какой целью в схему следящей САУ дополнительно включены корректирующие звенья (КЗ)? 10.За счет каких устройств следящей САУ и каких параметров этих устройств обеспечены заданные значения ошибок слежения системы за объектом: по положению, по скорости и по ускорению? 11.Почему для определения постоянных времени Т1 и Т2 корректирующих звеньев недостаточно формулы разности Т1 – Т2, следующей из формулы для С2, а приходится выводить еще одну связывающую Т1 и Т2 формулу, следующую из графика ЛАЧХ разомкнутой системы? 12.Почему при построении графика ЛАЧХ разомкнутой системы до частоты среза не учитываются 4 инерционных звена: РПУ, ФД, УМ и ЭДА? Оборудование и ПО для выполнения работы 1. Персональный компьютер с программным обеспечением, позволяющим выполнить расчеты и исследования в соответствии с заданием. МЕТОДИЧЕСКИЕ УКАЗАНИЯ Необходимо по литературе (указанной в списке и по другой доступной в библиотеках или в сети Интернет) изучить теорию, характеристики и области применения следящих систем автоматического управления (САУ), а затем приступить к выполнению задания по работе. Порядок выполнения работы 1. Для выполнения задания по работе вначале определим передаточную функцию исходной части разомкнутой САУ без учета КЗ и МОС, она будет равна произведению передаточных функций входящих в нее звеньев: РПУ, ФД, УМ и ЭДА: WРИ WРПУ WФД WУМ WЭДА. Т.к. в разомкнутую САУ входит 4 инерционных звена и интегратор, а гарантированно устойчивой является замкнутая система только при 2-х инерционных звеньях, поэтому для обеспечения устойчивости и заданных показателей (ошибок слежения и полосы пропускания) в САУ дополнительно надо включить 2 корректирующих звена (КЗ). Для упрощения расчетов включим два КЗ с одинаковыми параметрами. В состав первого КЗ включим усилитель с коэффициентом усиления kкз, назначение которого – обеспечить заданную ошибку слежения по скорости е1. Тогда при последовательном соединении этих двух КЗ их передаточная функция будет равна: WКЗ k КЗ (1 рТ 2 ) 2 WКЗ1 WКЗ 2 , (1 рТ 1 ) 2 где Wкз1 k кз 1 pT2 /1 pT1 , Wкз 2 1 pT2 /1 pT1 . 2. С учетом включенных последовательно двух КЗ передаточная функция разомкнутой системы будет равна: 1 pT2 K 2 p 1 pT1 1 pTРПУ (1 рТ ФД ) (1 рТ УМ ) (1 рТ ЭДА ) 2 WР WРИ WКЗ 2 K p d i 0 6 i pi b p i 0 i 1 2 pT2 p 2T22 K p 1 (2T1 TРПУ Т ФД Т УМ Т ЭДА ) р i где K k РПУ kФД kУМ k ЭДА k КЗ = 0,005*100*8*kкз = 4*kкз - результирующий коэффициент усиления разомкнутой САУ, а точки в знаменателе означают остальные члены полинома, они в дальнейших расчетах не используются. 3. Далее необходимо рассчитать три параметра КЗ: коэффициент усиления kкз и постоянные времени T1 и Т2. Для этого воспользуемся формулами для коэффициентов ошибок. Коэффициенты ошибок по положению, скорости и ускорению по определению равны: 2е2 . р 2 2 Здесь p- символ дифференцирования, т.е. рφ= ц 10 c , p2 φ= 2ц 20 2 . c t t Т.к. порядок астатизма данной системы 1 из-за наличия в системе С0 е0 0; С1 е1 ; р С2 интегратора (роль интегратора выполняет электродвигатель), то коэффициенты ошибок по положению, скорости и ускорению будут равны: С0 0 ; С1 1 К ; С 2 2( b1 d1 1 2 ) , где b1,d1 - коэффициенты при K K комплексной переменной p в знаменателе и числителе приведенной выше передаточной функции Wp: b1 2T1 TРПУ Т ФД Т УМ Т ЭДА , d1 2 T2 . Вначале надо рассчитать результирующий коэффициент усиления К по двум формулам: K где частота среза ср 1 C1 , К=1,5 ωср, n 2 cos( ) , здесь ωп – заданная полоса 1 пропускания САУ, arcsin - запас устойчивости по фазе, М – M заданный показатель колебательности. Затем из этих двух значений К надо выбрать большее значение К и рассчитать коэффициент усиления kкз по формуле k КЗ К = k РПУ kФД kУМ k ЭДА К/4. Рассчитанное по этой формуле значение коэффициента усиления kкз усилителя в первом КЗ обеспечивает заданную ошибку по скорости е1. Теперь приступим к расчету постоянных времени T1 и Т2 обоих корректирующих звеньев. Из выражения для С2 имеем: К С2 1 b1 d1 T0 , 2 К где d1 2 T2 , b1 2T1 TРПУ Т ФД Т УМ Т ЭДА . Подставим значения b1 и d1 в эту формулу и получим первое соотношение между Т1 и Т2: T1 T2 1 T0 TРПУ Т ФД Т УМ TЭДА Т 01 2 Эта разность постоянных времени Т1 и Т2 корректирующих звеньев обеспечивает заданную ошибку по ускорению е2. При Т1 - Т2 > 0 имеем КЗ с отставанием по фазе, при Т1 - Т2 < 0 имеем КЗ с опережением по фазе. Но постоянные времени Т1 и Т2 влияют и на полосу пропускания САУ ωп, поэтому второе соотношение между Т1 и Т2, обеспечивающее заданную полосу пропускания САУ ωп, найдем из ЛАЧХ разомкнутой САУ. При 1 выполнении условия ср до частоты среза ЛАЧХ разомкнутой САУ Т ЭДА будет равна сумме ЛАЧХ только трех звеньев: ЛАЧХ интегратора и ЛАЧХ двух КЗ и имеет следующий вид: Здесь ω1 = 1/T1 , ω2 = 1/T2 - частоты сопряжения двух КЗ с отставанием по фазе. До частоты ω1 ЛАЧХ разомкнутой САУ определяется только интегратором: 1) 1 20 lg K 1 На участке 1 , 2 наклон ЛАЧХ -60 дБ/дек: 2) 1 2 60(lg 2 lg 1 ) 60 lg 2 1 На участке 2 , ср наклон ЛАЧХ -20 дБ/дек: 3) ( 2 ) (cp ) 20 lg cp , причем Λ(ωср) =0 (см. рисунок ЛАЧХ). 2 Подставим формулы (1) и (3) в (2) и с учетом Λ(ωср) =0 получим: 20 lg K 1 20 lg cp 60 lg 2 2 1 / : 20 K lg 2 3 lg 1 2 cp 1 2 2 cp 1 T1 K K Откуда => T1 T2 . T2 cp cp K Это второе соотношение между Т1 и Т2 обеспечивает заданную полосу пропускания системы ωп. Составим систему из двух уравнений: Т 1 Т 2 Т 01 K Т 1 Т 2 ср Решив систему этих двух уравнений, найдем постоянные времени Т1 и Т 2 двух КЗ, при которых обеспечиваются заданные ошибки слежения САУ за объектом по ускорению и полоса пропускания САУ ωп. СОДЕРЖАНИЕ ОТЧЕТА Отчет должен содержать: - структурную схему САУ, - исходные данные для расчета с учетом значений предпоследней N1 и последней N 0 цифр зачетной книжки студента, - выводы формул для расчета параметров КЗ: коэффициента усиления kкз и постоянных времени T1 и Т2, - результаты расчета параметров КЗ: коэффициента усиления kкз и постоянных времени T1 и Т2.