Курсовая - пример
реклама

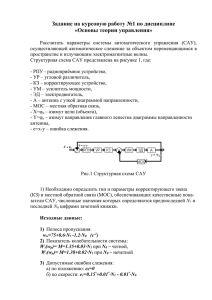
Министерство РФ по связи и информатизации Поволжский государственный университет телекоммуникаций и информатики Кафедра РРТ Сдана на проверку «_____»___________ 2014 г. Допустить к защите «_____»___________2014 г. Защищена с оценкой ______ «_____»___________2014 г. КУРСОВАЯ РАБОТА по дисциплине ОСНОВЫ ТЕОРИИ УПРАВЛЕНИЯ Пояснительная записка на листах Студент группы (роспись) Руководитель (роспись) Самара 2014 Рецензия 2 Оглавление 1. Задание для выполнения курсовой работы .................................................... 4 ЧАСТЬ 1 ................................................................................................................... 4 1.1.ЗАДАНИЕ №1. .................................................................................................................4 1.2. ВЫПОЛНЕНИЕ ЗАДАНИЯ ( ЧАСТЬ1 ) .....................................................................5 1.3. Первое корректирующее звено включим после фазового детектора (ФД). В его состав включим усилитель с коэффициентом kКЗ . ........................................................10 Список использованных источников .................................................................. 15 3 1. Задание для выполнения курсовой работы ЧАСТЬ 1 1.1.ЗАДАНИЕ №1. Рассчитать параметры системы автоматического управления (САУ), осуществляющей автоматическое слежение за объектом, перемещающимся в пространстве и излучающим электромагнитные волны. Структурная схема САУ представлена на рис.1. Рис. 1 Структурная схема САУ Где: x=φц - азимут цели (в градусах), y=φа - азимут диаграммы направленности антенны, e=x-y - ошибка слежения, РПУ - радиоприёмное устройство, ФД - фазовый детектор, КЗ - корректирующее звено, УМ - усилитель мощности, ЭД – электродвигатель, А - антенна (объект управления), МОС - местная обратная связь. Необходимо определить тип и параметры корректирующего звена КЗ и местной обратной связи МОС, обеспечивающие качественные показатели САУ, численные значения которых определяются предпоследней N1=2 и последней N0=5 цифрами в зачетной книжки. Исходные данные для расчёта: 1. Полоса пропускания: WП=75+0.6·N1 -1.2·N0 (c-1) 2. Показатель колебательности системы: Wз(wр)= M=1.35+0.03·N1 при N0 – четной, Wз(wр)= M=1.38+0.02·N1 при N0 – нечетной 3. Допустимые ошибки САУ: а) по положению: e0=0 4 б) по скорости: e1=0.15°+0.01°·N1 - 0.01°·N0 в) по ускорению: e2=0.6°+0.01°·N1 - 0.01°·N0 при следующих значениях 1-й и 2-й производных изменения азимута объекта во времени: dц d 2ц 10 / c 20 / c 2 , 2 dt dt где d ц dt - скорость отклонения объекта, d 2 ц dt 2 - ускорение отклонения объекта 4. Параметры исходной части САУ : WРПУ k РПУ 1 pTРПУ ; kУМ WУМ ; 1 pTУМ kФД WФД ; 1 рТФД k ЭДА WЭДА p (1 pTЭДА ) k k 5 10 3 В РПУ ФД kУМ 100 k ЭДА 8 1 Вс TРПУ TФД TУМ 5 10 3 с Т ЭДА 12 10 3 0.2 10 3 N1 0.2 10 3 N 0 k 20 10 6 В с ТГ После расчёта параметров КЗ и МОС необходимо составить их функциональные схемы с указанием значений C , R и kус (сопротивлений, емкостей и коэффициентов усиления), а также проверить запас устойчивости по фазе, усилению и определить фактический показатель колебательности САУ Mф. Используя билинейное Z преобразование рассчитать системные функции цифровых прототипов КЗ и МОС и составить их структурные схемы дреализации на ЭВМ. 1.2. ВЫПОЛНЕНИЕ ЗАДАНИЯ ( ЧАСТЬ1 ) 5 Был определен тип и параметры корректирующего звена (КЗ) и местной обратной связи (МОС), обеспечивающих качественные показатели САУ, численные значения которых определяются предпоследней N1=2 и последней N0=5 цифрами зачетной книжки. Исходные данные для расчёта : N1=2 N0=5 1. Полоса пропускания: w 75 0.6 N 1.2 N n 1 0 w 70,2 n 2. Показатель колебательности системы: M 1.38 0.02 N 1 M 1.42 3. Допустимые ошибки САУ: а) по положению: e0 0 ; б) по скорости: e1 0.15 0.01 N1 0.01 N 0 e 0.12 ; 1 e 0.57 . 2 в) по ускорению: e2 0.6 0.01 N1 0.01 N 0 при следующих значениях 1-й и 2-й производных изменения азимута объекта во времени: d ц dt 10 °/с, d 2 ц dt 2 20 °/с2, где d ц dt - скорость отклонения объекта, ускорение отклонения объекта; 4. Параметры исходной части: Передаточные функции РПУ, УМ, ФД, ЭДА соответственно: WРПУ k РПУ 1 pTРПУ ; kУМ WУМ ; 1 pTУМ kФД WФД ; 1 рТФД k ЭДА . WЭДА p (1 pTЭДА ) Численные значения коэффициентов: 6 d 2 ц dt 2 - k РПУ k 5 10 3 В ФД kУМ 100 k ЭДА 8 1 Вс TРПУ TФД TУМ 5 10 3 с Т 12 10 3 0.2 10 3 N 0.2 10 3 N ЭДА 1 0 k 20 10 6 В с ТГ Т 13.4 10 3 ЭДА Передаточная функция исходной части разомкнутой САУ без учёта КЗ и МОС определяется по формуле: W W W W W РИ РПУ ФД УМ ЭДА Т.к. в передаточную функцию WРИ входит четыре инерционных звена первого порядка и интегратор (интегратор входит в передаточную функцию WЭДА, т.к. выходным параметром электродвигателя является угол поворота антенны), а гарантированно устойчивой является система только с двумя инерционными звеньями, поэтому для обеспечения качественных показателей САУ понадобится включить как минимум два корректирующих звена. Для упрощения расчётов возьмём два корректирующих звена с одинаковыми параметрами. Общая передаточная функция последовательно соединенных корректирующих звеньев имеет вид: Wкз Wкз1 Wкз 2 1 pT2 kкз 1 pT1 2 Неизвестны параметры корректирующих звеньев: k КЗ , T1 , T2 Общая передаточная функция разомкнутой системы равна: 2 1 pT2 k k 3 2 p 1 pTРПУ 1 pT1 1 pTЭДА p 2 WР WРИ WКЗ d p i 0 6 b p i 0 где i i i i k 1 2 p T2 p 2 T22 2 p 1 p (TЭДА 3TРПУ 2T1 ) p 2 (3TРПУ TЭДА 3TРПУ 4T1 TРПУ T12 ) k k РПУ kУР kУМ kЭДА k КЗ 7 , Коэффициент ошибок по положению, скорости и ускорению: е 1 С 1 p e c0 0 0 y С 2 y 2 е 2 2 p , y где р – символ дифференцирования. Т.к. в состав системы входит один интегратор, то порядок астатизма системы ν =1. Для ν =1 имеем: c 0, 0 1 c , 1 k b d 1 , c 2 1 1 2 k 2 k e с 1, 1 10 c 0.012 1 2e с 2, 2 20 c 0.057 2 Определим коэффициент усиления для обеспечения заданного c: k 1 c1 k 83.333 Определим коэффициент k КЗ : k КЗ k k k k k РПУ ФД УМ ЭДА k КЗ 20,833 В случае, когда k КЗ 1 , в состав КЗ надо ввести неинвертирующий усилитель Из выражения для с2: kc 2 1 T 2,387 Т b d 0 0 1 1 2 k b 2T T T T T , d 2T2 1 1 РПУ УР УМ ЭДА 1 Подставим все известные значения в формулу нахождения Т0 и выразим искомые Т1 и Т2: T T 0.5 ( T 3 T T ) РПУ 1 2 0 ЭДА T T 1 .179 1 2 В случае, когда Т1-Т2 > 0 , требуется корректирующее звено с отставанием по фазе. 8 Величины Т1 и Т2 влияют так же на полосу пропускания замкнутой системы, поэтому найдем 2-ое соотношение между Т1 и Т2 из ЛАЧХ разомкнутой САУ. Для этого сначала определим запас устойчивости по фазе: 1 arcsin M 0.781 Затем найдем частоту среза разомкнутой системы и частоту сопряжения самого инерционного звена : n 2 cos( ) 1 с Т ЭДА ср В случае , когда ср 49,422 74,627 с ( с – частота сопряжения самого ω ω ср c инерционного звена – электродвигателя, нагруженного антенной), а именно 49.422 74.627 , то до частоты среза ЛАЧХ разомкнутой системы определяется только интегратором и двумя КЗ ЛАЧХ разомкнутой системы представлена на рис. 2 . Рис. 2 ЛАЧХ разомкнутой системы автоматического управления Из графика ЛАЧХ имеем: 1) p 1 20 lg k 1 9 На участке ( 1 ; 2): 2) p 1 p 2 60(lg 2 lg 1 ) 60 lg 2 1 На участке ( 2 ; ср ) : cp 3) p ( ) p ( cp ) 20 lg 2 2 т.к. p (cp ) 0 , то подставив выражения 1) и 3) во 2) , получим: 20 lg k 1 20 lg cp 60 lg 2 2 1 k 2 3 lg 1 lg 2 cp 1 k 2 cp 1 1 1 T1 2 1 T2 2 Второе соотношение имеет вид: k T1 T2 cp ср 49,422 к 83,33 Решая систему уравнений, найдем Т1 и Т2: к Т Т2 1 ср Т Т 0.5 (Т 3 Т 1 РПУ Т ЭДА ) 2 0 Т1 5,122 Т 2 3,943 1.3. Первое корректирующее звено включим после фазового детектора (ФД). В его состав включим усилитель с коэффициентом kКЗ . 10 Схема корректирующего звена представлена на рис. 3. Рис. 3 Схема корректирующего звена Необходимо определить параметры схемы: R 1 ОС КЗ R R : 1000 Oм R : ( k 1) R ОС КЗ R : 19833Oм ОС k С=10 мкФ Решив систему уравнений : T2 R2 C T1 R1 R2 C Определим R1 и R2 T R 1 R 1.012 10 5 Ом 1 C 2 T R 2 3.943 10 5 Oм 2 C Второе корректирующее звено реализуем через местную обратную связь, охватывающую звенья с нестабильными параметрами УС, ЭД и А (электродвигатель, антенна). Передаточная функция МОС определяется по формуле : 1 W0 W2 k УМ k ЭДА 1 1 ,где W2 - передаточная W p 1 pT 1 pT КЗ 2 УМ ЭДА функция звеньев, охваченных ОС 1 pT2 WКЗ2 1 pT1 - передаточная функция второго КЗ без усилителя 11 1 ( ср 49.422 сЭДА 74.627 ) , В случае , когда ср сЭДА TЭДА передаточную функцию W2 можно определить по приближенной формуле : W2 k УМ k ЭДА p . Тогда : p W0 k УМ k ЭДА где k 0 k 1 pT k p2 1 , 1 0 1 pT 1 pT 2 2 T T 1 2 k УМ ЭДА Передаточную k 14,73 * 10 -4 0 функцию W0 реализуем последовательным соединением тахогенератора дифференцирующей цепи , с постоянной времени T2 , и усилителя , с коэффициентом усиления kУС. Передаточная функция МОС имеет вид: k0 p2 pT2 W0 k p k УС 1 pT2 1 pT2 ТГ W W УС ТГ W ДЦ Из выражения для вычисления W0 определим kУС: k УС k 0 T k 2 ТГ k 18,688 УС Схема дифференцирующей цепи представлена на рис.4. Рис.4 Схема дифференцирующей цепи 12 Общая функциональная схема местной обратной связи представлена на рис.5. Рис.5 Общая функциональная схема МОС R/ Зададимся R´=1000 Ом и из формулы k УС 1 ОС и определим RОС´ R/ R : ( k 1) R OC УС 1 R 17.9 10 5 OC Oм Фактические запасы устойчивости по усилению и фазе определяются графоаналитическим методом по точным ЛАЧХ и ЛФЧХ построенным по формулам системы MathCad : ЛАЧХ : p 20 lg k 20 lg 20 lg 1 T 2 интегратор 2 20 lg 1 T1 2 30 lg 1 TРПУ 2 РПУ , ФД , УМ 2 10 lg 1 T ЭДА ЭД ЛФЧХ : p 2 arctg T 2 arctg T 3 arctg T arctg T 2 1 РПУ ЭДА 2 КЗ РПУ, ФД, УМ интегратор ЭД 13 Графики ЛАЧХ и ЛФЧХ разомкнутой САУ. представлены на рис. 6 3.142 2.513 1.885 1.257 0.628 0 0.628 1.257 1.885 ( ) 2.513 ( ) A ( ) 3.142 B( ) 3.77 4.398 5.027 5.655 6.283 6.912 7.54 8.168 8.796 9.425 20 23 26 29 32 35 38 41 44 47 50 53 56 59 62 65 68 71 74 77 80 Рис. 6 Графическое представление ЛАЧХ и ЛФЧХ В процессе эксплуатации системы РА ее параметры (коэффициенты усиления, постоянные времени) из-за изменения внешних условий, колебаний напряжений источников энергии и других причин отличаются от расчетных значений. Если не принять определенных мер, то система РА может стать неустойчивой. Для исключения этого явления при проектировании следует обеспечить определенные запасы 14 устойчивости системы. Запасы устойчивости определяются на двух частотах: частоте среза ωср и на критической частоте ωкр. На частоте среза ЛАЧХ разомкнутой системы равна нулю, на критической частоте ЛФЧХ принимает значение, равное –π, т.е.: ( ) 0 р ср ( ) р кр Определим запас устойчивости по усилению: дБ 5,216 ( ) р кр Согласно графикам ЛАЧХ и ЛФЧХ : ср < кр , что свидетельствует об устойчивости данной системы. ср кр ср 41 кр 61 Определим запас устойчивости по фазе: з кз 0 . 457 Определим фактический показатель колебательности: MФ 1 sin М ф 2.266 ( MФ - это значение АЧХ замкнутой системы на резонансной частоте ) Список использованных источников 15 1. Тяжев А.И. Основы теории управления и радиоавтоматика. Учебное пособие. - М.: Радио и связь, 1999. - 188 с.: ил. 2. Конспект лекции по предмету «ОТУ и РА». 16