Нелинейный осциллятор
реклама

Министерство образования и науки
Государственное образовательное учреждение высшего
профессионального образования
«Нижегородский государственный университет им. Н. И. Лобачевского»
факультет вычислительной математики и кибернетики
Курсовая работа
«Модель осциллятора с
квадратичной нелинейностью»
Выполнил:
студент группы 83-10
Сериков Евгений Владимирович
Руководитель:
Кадина Елена Юрьевна.
Нижний Новгород 2011г.
Оглавление
Оглавление .................................................................................................................... 2
Введение ........................................................................................................................ 3
Моделирование уменьшенных копий процессов ..................................................... 5
Применение осциллятора в физике ............................................................................ 8
Фазовый портрет ....................................................................................................... 12
Заключение ................................................................................................................. 15
Литература ................................................................................................................. 16
Введение
Цель данной работы: Рассмотреть применение осцилляторов с квадратичной
нелинейностью в математике и физике.
Задачи:
1) Рассмотреть причины и случаи применения осциллятора с квадратичной
нелинейностью.
2) Построить фазовый портрет осциллятора.
3) Изучить определения по данной теме.
Осциллятор (от лат. oscillo — качаюсь), физическая система, совершающая колебания.
Термином осциллятор пользуются для любой системы, если описывающие её
величины периодически меняются со временем.
Классический осциллятор — механическая система, совершающая колебания около
положения устойчивого равновесия.
Колебания осциллятора есть важный пример периодического движения и служат
точной или приближенной моделью во многих задачах классической и квантовой
физики. В качестве примеров гармонического осциллятора могут быть пружинный,
физический и математический маятники, колебательный контур (для токов и
напряжений настолько малых, что можно было бы элементы контура считать
линейными). Кроме этого осцилляторы применяются для моделирования процессов
происходящих в оптике и квантовой физике.
Существуют два способа рассмотрения осцилляторов:
Консервативный случай - это случай, при котором в системе отсутствуют
диссипативные силы (вязкое трение). Диссипативным (затухающим) осциллятором
принято
называть
систему,
в
которой
присутствует
диссипативная
сила,
пропорциональная скорости движения (вязкое трение). В данной работе будет
рассматриваться только консервативный случай.
Рассмотрим уравнение консервативного осциллятора:
ẍ +f x = 0
2
Если f x = ax bx c , то такую систему будем называть осциллятором с квадратичной
нелинейностью. К ней можно прийти практически из любого нелинейного осциллятора
разложив f x
в ε окрестности нужной нам точки в ряд Тейлора и учитывая в
разложении только два члена. Но это способ можно использовать если амплитуда
колебаний в потенциальной яме не столь мала, чтобы можно было ограничиться
линейным приближением в разложении функции f x , но и не столь велика, чтобы
стали существенными последующие члены разложения Тейлора.
ẍ +f ' 0 x+
1 ''
f 0 x 2= 0
2
Потенциальная функция осциллятора с квадратичной нелинейностью содержит члены
второй и третьей степени:
V x=
1 '
1 ''
f 0 x2
f 0 x3
2
3
Осцилляторы с квадратичной нелинейность применяются при моделировании
некоторых физических процессов, или для моделирования уменьшенных копий
колебательных процессов.
Моделирование уменьшенных копий процессов
Рассмотрим осциллятор с квадратичной нелинейностью, но рассматривать будем около
'
''
точки в которой f 0 = 0 и f 0 =V 0 0 эти условия мы сможем задать, рассматривая
конкретную
f x
и
перемещения
начала
координат
с
помощью
линейных
'
преобразований. Так как f 0 0 , то коэффициент при x можно обозначить за
α
2
.
Получаем формулу:
ẍ α2 x βx 2= 0
Введем новые переменные, X
и
τ
, которые отличаются от присутствующих в
условии переменных координаты и времени только масштабом:
x=AX
где
A
,
t=Bτ
и
B
- константы. Подстановим в уравнение осциллятора:
A d2 x
+Aα 2 X+A2 βX 2= 0
2
2
B dτ
или если поделить на
A
B
2
, то получим:
d2x
+B 2 α2 X+AB2 βX 2= 0
d τ2
Определим A и
B
B 2 α2= 1 , AB 2 β=1
Отсюда находим:
так, чтобы коэффициенты при X были равны 1.
B=
1
α
,
A=
α2
β
Окончательно можно переписать уравнение с начальными условиями в виде:
d2 X
+X+X 2= 0
2
dτ
Получившееся дифференциальное уравнение содержит только один неизвесный
параметр
X 0 =x0 β /α2
,
представляющий
собой
комбинацию,
составленную
из
параметров исходной задачи. В свою очередь константы исходной задачи могут
состоять из других констант(ускорение свободного падения, пределы прочности
материалов...), которые могут подбираться в зависимости от результата. Теперь
достаточно исследовать поведение решения уравнения осциллятора в зависимости от
этого единственного параметра. Если имеем две системы, характеризуемые разными
значениями параметров
α
, β , x 0 , но одинаковым
X0
, то их динамика будет
подобной в том смысле, что все величины, относящиеся к одной системе, можно
получить из величин, относящихся к другой, надлежащим пересчетом масштаба.
Параметр
X0
, следовательно, является для нашей задачи критерием подобия.
Эта идея служит основой физического моделирования. Для того, чтобы выяснить
детали поведения системы, описываемой определенными уравнениями, но сложной,
дорогой или недоступной для прямого экспериментирования, мы можем провести
исследование специально изготовленной модели, отличающейся, например, размерами,
весом, использованными материалами, и т. д. Или проводя эксперименты с
уменьшенной
копией
объекта,
мы
можем
подбирать
параметры
этого
объекта(материалы из которых он изготовлен, нагрузку которую он можжет
выдержать...). Если критерии подобия для системы и модели совпадают, то должны
соответствовать и детали динамики.
Причем, моделируя процессы, мы можем компенсировать невозможность изменения
одних параметров за счет других. Например: моделируя процесс движения вагона по
рельсам мы легко сможем уменьшить размер вагона, размер рельсов в соответствии с
масштабом модели, но нам сложно будет изменить силу притяжения g , но это легко
компенсируется, например, за счет изменения скорости движения. И, если критерии
подобия для системы и модели совпадают, то должны соответствовать и детали
динамики.
Применение осциллятора в физике
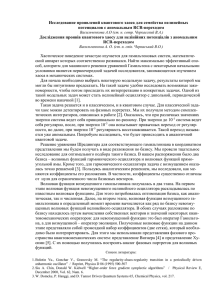
Уравнение осциллятора описывает, например, маятник, колебательный контур,
катушка индуктивности которого содержит ферритовый сердечник, что приводит к
линейной зависимости магнитного потока Ф от тока
I
. Нелинейность в контуре
может быть связана с емкостью, если заряд Q нелинейно зависит от напряжения U .
На рисунке С U
– емкость p – n - перехода или конденсатор с сегнетоэлектриком. В
механике это , в частности, шарик, катающийся по желобу. Кроме того осциллятор с
квадратичной нелинейностью можно применять при построении аттракционов.
Например русские горки. Для расчета движения тележки по инерции, например, при
отказе тормозов. То есть при отказе тормозов нужно чтобы тележка не вышла из ямы а
осталась в ней.
Для простоты рассмотрим уравнение движения шарика по желобу.
Уравнение движения шарика массы m имеет вид:
dz
g 0
x
dx
dz
m
x
F
,
F
mg
sin
mg
или
dx
Здесь g – ускорение свободного падения.
В общем виде уравнение можно переписать следующим образом:
ẍ
dV x
= 0 , V x = gz x
dx
2
3
Когда V x ~ x , наш осциллятор линейный. Соответственно V x ~ x осциллятор с
3
квадратичной нелинейностью. Если, например, уравнение желоба z = x ,то получим
2
дифференциальное уравнение ẍ 3gx = 0 . Которое легко интегрируется. Если ввести
x v ,
то
dv dx
dx dt
dV x
dv
= 0 или v
dx
dx
dV x
v2
= 0 . Тогда получаем
V x = E , где
2
dx
E
-
полная энергия нелинейного осциллятора, а V x - его потенциальная энергия.
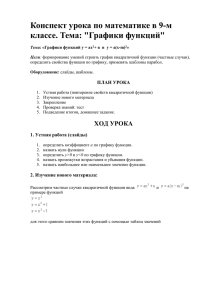
Представить качественную картину движений нелинейного осциллятора можно, по
существу, не решая конкретной задачи, по виду фазового портрета. Из записанного
выше выражения для закона сохранения энергии скорость выражается так:
ẋ= ± 2 E − V x
Это фактически уравнения траекторий на фазовой плоскости для нашей модели.
Поскольку энергия сохраняется, мы можем задать
легко найти x и нарисовать фазовые траектории .
E
для t 0 и, если известна V x ,
Движений с малой начальной энергией E V x попросту не существует, ẋ получается
мнимой. Начальному уровню энергии 2 соответствует движение на участках 0 x x02
и x12xx22, где x02 , x12 , x 22 определяются из условия x 0 , т.е. V x
=
E
.Фазовые
траектории, соответствующие такому движению обозначены на рисунке цифрой 2 .
Точкам, в которых
dV x
=0
dx
, соответствуют состояния равновесия. Меняя начальные
значения энергии, можно построить все траектории на фазовой плоскости.
Таким образом, движение нелинейного осциллятора полностью определяется
начальной энергией. Колебания малой амплитуды будут гармоническими. С ростом
энергии колебания становятся все более отличными от гармонических – в
периодическом движении большую часть периода занимают медленные участки,
соответствующие взбеганию шарика на вершину горки и началу спуска с нее. Наконец,
при начальной энергии E =mgh движение шарика перестанет быть периодическим(на
рисунке оно изображено сепаратрисой.
Кроме того осциллятор с квадратичной нелинейностью можно применять при
построении аттракционов. Например русские горки. Для расчета движения тележки по
инерции, например, при отказе тормозов. То есть при отказе тормозов нужно чтобы
тележка не вышла из ямы а осталась в ней.
Фазовый портрет
Построим фазовый портрет осциллятора с квадратичной нелинейностью:
ẍ− x 2 ax= 0
Это уравнение
эквивалентно системе дифференциальных уравнений 1-го порядка:
dx
=z
dt
dz
= x a− x
dt
{
После почленного деления первого уравнения на второе получим:
dz x a− x
=
dx
z
zdz= x a− x dx
z2
= ∫ x a− x
2
z= ± 2
∫
С= V x
x 2 x3
C где V x = a −
2 3
x a− x dx C
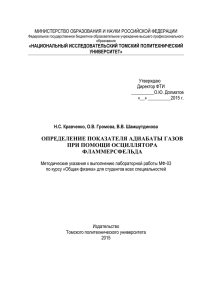
Нарисуем фазовый портрет для нашей системы. Для этого найдем корни уравнения
x a− x = 0 . x 1= 0, x 2 = a Точки x 1, x 2
особые. В начале координат имеется локальный
минимум функции V x , где будет располагаться особая точка типа центр. При x= а
потенциальная функция имеет максимум, и здесь находится особая точка седло. На
рисунке показаны различные
z2
f
x
:
= ∫ f x dx C . Черным цветом выделена
первообразные
2
первообразная, отвечающая сепаратрисе.
Сепаратриса делит фазовую плоскость на три области. Соответственно, имеется три
разных топологических типа траекторий.
1) Замкнутые
траектории(обозначены
красным),
располагающиеся
внутри
образованной сепаратрисой петли, охватывающей центр. Они соответствуют
колебаниям вблизи локального минимума потенциала.
2) Незамкнутые траектории, расположенные слева от сепаратрисы. Они отвечают
движениям по левому склону потенциального рельефа с уходом на минус
бесконечность.
3) Незамкнутые
соответствуют
траектории,
движения,
расположенные
которые
справа
захватывают,
от
сепаратрисы.
как
левый
Им
склон
потенциального рельефа, так и область ямы, но энергия слишком велика, чтобы
произошел заход в области минимума потенциала. Возможен также уход на
минус бесконечность.
Заключение
В данной работе были рассмотрены случаи применения осцилляторов с квадратичной
нелинейностью. Причины применения именно этой модели осциллятора. А именно
сциллятор с квадратичной нелинейностью применяется для описания консервативных
колебаний в такой ситуации, когда амплитуда колебаний в потенциальной яме не столь
мала, чтобы можно было ограничиться линейным приближением в разложении
функции, но и не столь велика, чтобы стали существенными последующие члены
разложения Тейлора.
Литература
1) Андронов А. А.,Витт А. А., Xайкин С. Э., Теория колебаний, [3 изд.], М., 1981;
2) Горелик Г. С., Колебания и волны, 2 изд., М., 1959;
3) Уизем Д ж., Линейные и нелинейные волны, пер. с англ., М., 1977;
4) Рабинович М. И., Трубецков Д. И., Введение в теорию колебаний и волн, М.,
1984. А. Н. Басович;
5) Физическая энциклопедия. В 5-ти томах. — М.: Советская энциклопедия.
Главный редактор А. М. Прохоров. 1988.