Метод brox et al
реклама

PDE в обработке видео
Оптический поток
PDE = уравнения в частных
производных
( I z2 ( I xz2 I yz2 )) ( I x I z ( I xx I xz I xy I yz )) div( ( 3u 3v ) 3u ) 0,
2
2
( I z2 ( I xz2 I yz2 )) ( I y I z ( I yy I yz I xy I xz )) div( ( 3u 3v ) 3v) 0
2
Видео = …
2
Компьютерное зрение
Одна из основных задач:
Получить информацию о движении в кадре
Компьютерное зрение
Одна из основных задач:
Получить информацию о движении в кадре
•Идентифицировать движение
•Определить его направление
•Определить скорость
Компьютерное зрение
Одна из основных задач:
Получить информацию о движении в кадре
•Идентифицировать движение
•Определить его направление
•Определить скорость
Положение и перемещения камеры обычно неизвестны
Компьютерное зрение
Одна из основных задач:
Получить информацию о движении в кадре
•Идентифицировать движение
•Определить его направление
•Определить скорость
Положение и перемещения камеры обычно неизвестны
Ограничиваем задачу поиском относительного движения объектов в
системе отсчета, связанной с камерой
Компьютерное зрение
Относительное движение между двумя последовательными кадрами можно
представить как векторное поле – оптический поток
Оптический поток
Применение
•Визуальные эффекты
•Отслеживание объектов
•Автономная навигация роботов
•Системы видеонаблюдения
Оптический поток
Методы нахождения
• Фазовая корреляция
• преобразование Фурье
• только прямолинейное движение
• все точки перемещаются одинаково
Взаимная корреляция сигналов
( f g )(t )
f
*
( y ) g ( y t )dy
F{ f g} ( F{ f }) F{g}
*
Оптический поток
Методы нахождения
• Фазовая корреляция
• преобразование Фурье
• только прямолинейное движение
• все точки перемещаются одинаково
• Блочные методы
• поиск похожих блоков
• все точки блока перемещаются одинаково
Оптический поток
Методы нахождения
• Фазовая корреляция
• преобразование Фурье
• только прямолинейное движение
• все точки перемещаются одинаково
• Блочные методы
• поиск похожих блоков
• все точки блока перемещаются одинаково
• Вариационные методы
• минимизация некоторого функционала
E (u , v) inf
x a b x a b 0
u решение u a b inf x a b 0
x
E (u ) u a b inf
Оптический поток
Вариационные методы
•формулировка в виде задачи оптимизации
•плотное поле скоростей
•для каждого пикселя
•высокая точность
•смещение не обязательно кратно размеру пикселя
Оптический поток
Построение модели
•Дано:
•Непрерывная последовательность изображений
I ( x, y, t ), ( x, y) , t 0, T
яркость в точке
в момент времени
•Надо найти:
•Поле смещений
u ( x, y , t )
w ( x, y , t ) v ( x, y , t )
1
Оптический поток
I (,, t )
I (,, t 1)
v
u
w (,, t )
Построение модели
Предположение 1
Постоянство яркости пикселей
I ( x u, y v, t 1) I ( x, y, t ) 0
Предположение 2
u , v – малы, I – гладкая функция
В этом случае предыдущее равенство можно линеаризовать в точке ( x, y, t )
I ( x u, y v, t 1) I ( x, y, t ) I x ( x, y, t )u I y ( x, y, t )v I t ( x, y, t ) 1
I xu I y v I t 0
Построение модели
I xu I y v I t 0
•Одно уравнение для двух неизвестных
•Некорректная задача с бесконечным числом решений
•Известно как проблема апертуры(aperture problem)
•наблюдая лишь за небольшой частью кадра
невозможно однозначно определить направление
движения
Построение модели
I xu I y v I t 0
•Одно уравнение для двух неизвестных
•Некорректная задача с бесконечным числом решений
•Известно как проблема апертуры(aperture problem)
•наблюдая лишь за небольшой частью кадра
невозможно однозначно определить направление
движения
Как движется
шаблон?
Построение модели
I xu I y v I t 0
•Одно уравнение для двух неизвестных
•Некорректная задача с бесконечным числом решений
•Известно как проблема апертуры(aperture problem)
•наблюдая лишь за небольшой частью кадра
невозможно однозначно определить направление
движения
Как движется
шаблон?
По диагонали вправо?
Построение модели
I xu I y v I t 0
•Одно уравнение для двух неизвестных
•Некорректная задача с бесконечным числом решений
•Известно как проблема апертуры(aperture problem)
•наблюдая лишь за небольшой частью кадра
невозможно однозначно определить направление
движения
Как движется
шаблон?
По диагонали вправо?
Только вправо?
Построение модели
I xu I y v I t 0
•Одно уравнение для двух неизвестных
•Некорректная задача с бесконечным числом решений
•Известно как проблема апертуры(aperture problem)
•наблюдая лишь за небольшой частью кадра
невозможно однозначно определить направление
движения
Как движется
шаблон?
По диагонали вправо?
Только вправо?
Или только вниз?
Как визуализировать векторное
поле
При помощи стрелок,
предварительно понизив
разрешение
При помощи цвета:
•Направление – цвет
•Абсолютное значение – яркость
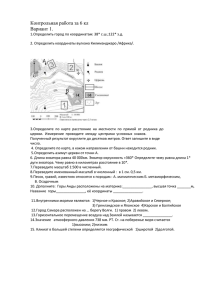
Как оценить качество
рассчитанного потока
Настоящий поток (ground truth)
Вычисленный поток (estimated)
wt
we
M N
Размер изображения
Средняя угловая ошибка (AAE – Average Angular Error)
t T
e
w
w
1
M
N
i, j
i, j
AAE
arccos
wt w e
NM i 1 j 1
i, j i, j
Средняя ошибка по конечной точке (AEE – Average Endpoint Error)
AEE
1
NM
M
i 1
N
t
e
w
w
i, j
i, j
j 1
Как оценить качество
рассчитанного потока
Ground truth
AAE = 3.14
AEE = 1.53
AAE = 32.55
AEE = 7.22
AAE = 2.76
AEE = 0.37
МЕТОД LUCAS-KANADE
Lucas B. D. and Kanade T. 1981, An iterative image registration technique
with an application to stereo vision.
Proceedings of Imaging understanding workshop, pp 121--130
Метод Lucas-Kanade
Предположение
•Поток кусочно-постоянный
Разобьем изображение на небольшие части (например, блоки 8x8), в
которых все точки двигаются одинаково
…
1 2
3
k
k
…
k
…
…
…
L
Для каждой из частей запишем линеаризованное уравнение постоянства
яркости
I x (i, j )u (k ) I y (i, j )v(k ) I t (i, j ), (i, j ) k
Метод Lucas-Kanade
Полученную систему уравнений можно записать в матричном виде
u
A b
v
I x (i1 , j1 ) I y (i1 , j1 )
I t (i1 , j1 )
A
, b
I (i , j ) I (i , j )
I (i , j )
y L
L
t L L
x L L
Метод Lucas-Kanade
Полученную систему уравнений можно записать в матричном
виде
u
A b
v
I x (i1 , j1 ) I y (i1 , j1 )
I t (i1 , j1 )
A
, b
I (i , j ) I (i , j )
I (i , j )
y L
L
t L L
x L L
Уравнений больше чем неизвестных
Ищем псевдорешение методом наименьших квадратов
Метод Lucas-Kanade
Псевдорешение
u
A A AT b
v
T
2
I
x
AT A
I I
x y
I I
I
x y
2
y
,
I x It
A b
I y It
T
Для каждой части изображения необходимо
•вычислить квадратную матрицу 2-го порядка
•правую часть – вектор размерности 2
•решить СЛАУ 2-го порядка
Метод Lucas-Kanade
Недостаток метода:
Матрица может оказаться вырожденной
•В однородных областях (без текстуры)
I x 0
T
A
A0
I y 0
•На гранях
2 2
c
Iy
T
Ix c Iy A A
cI I
y y
cI y I y
2
Iy
Метод Lucas-Kanade
Пространственные производные удобно вычислить заранее
•свертка столбцов(строк) с ядром 5x1 (1x5)
f ( xi 2 , y j ) 8 f ( xi 1 , y j ) 8 f ( xi 1 , y j ) f ( xx 2 , y j )
f
( xi , y j )
x
12h
xi 2
Ядро
1
12
xi 1
xi
xi 1
8
12
0
8
12
xi 2
1
12
Метод Lucas-Kanade
Решение систем
Распределение работы между потоками
16
8
Метод Lucas-Kanade
Каждый блок потоков обрабатывает две части изображения
Вычисление матрицы и правой части
•использовать reduce
Решение системы уравнений 2x2
•выписывается явно
•удобно вычислять потоками (0,0) и (8,0)
Вариационные методы
Основная идея
поле смещений минимизирует некоторый энергетический функционал
E (u, v) D(u, v) S (u, v)dxdy
D(u, v)
(data term) – штраф за отклонения от предположений о
постоянстве какой-либо величины (например, яркости)
S (u , v )
(smooth term) – штраф за отклонения от предположений
гладкости векторного поля
параметр регуляризации – определяет гладкость получаемого
векторного поля
МЕТОД HORN-SCHUNK
B.K.P. Horn and B.G. Schunck, "Determining optical flow." Artificial
Intelligence, vol 17, pp 185-203, 1981
Метод Horn-Schunck
Предположение
Поле смещений – гладкая функция в
области
Поле смещений минимизирует функционал
E (u, v) I xu I y v I t u v dxdy
2
data
2
2
smooth
data term – штраф за отклонения от предположения постоянства
яркости
smooth term – штраф за отклонение от предположения гладкости
поля
Минимизация функционала
E(u, v) F ( x, y, u, v, ux , u y , vx , v y )dxdy
Уравнения Эйлера-Лагранжа
0 Fu Fu x Fu y
x
y
0 Fv Fvx Fv y
x
y
С граничными условиями
Fu x
n 0,
Fu y
T
Fv x
n 0
Fv y
T
Метод Horn-Schunck
Уравнения Эйлера-Лагранжа
Граничные условия
I x ( I x u I y v I t ) u 0
I y ( I x u I y v I t ) v 0
2
2
2 2
x
y
nT u 0, nT v 0
Метод Horn-Schunck
Аппроксимация оператора Лапласа
Ш (i, j )
ui , j
ui 1, j 2ui , j ui 1, j
h
2
ui , j 1 2ui , j ui , j 1
h2
Метод Horn-Schunck
Дискретизация уравнений
ui , j ui , j
2
0 I x ui , j I x I y vi , j I x I t
2
h
( i , j )Ш ( i , j )
vi , j vi , j
0 I I u I 2 v I I
x y i, j
y i, j
y t
2
h
( i , j )Ш ( i , j )
Граничные условия уже учтены в дискретизованном уравнении
•Шаг сетки h обычно принимают равным 1
•Система с 2xNxM неизвестными – метод Гаусса неприменим из-за
высокой сложности и плохой устойчивости
Метод Якоби для решения СЛАУ
Рассмотрим СЛАУ вида
Ax b
A L D U
Итерационный метод
x0 0
x
k 1
1
k 1
i
D (b ( L U ) x ) x
k
1
k
bi aij x j
aii
j i
Метод Гаусса-Зейделя для
решения СЛАУ
Ax b
Рассмотрим СЛАУ вида
A L D U
Итерационный метод
x0 0
x
k 1
1
k 1
i
( D L) (b Ux ) x
k
1
k
k 1
bi aij xi aij xi
aii
j i
j i
Метод релаксации (SOR) для
решения СЛАУ
Ax b
Рассмотрим СЛАУ вида
A L D U
Итерационный метод
x0 0
x k 1 ( D L) 1 (b (U ( 1) D) x k )
k 1
i
x
(1 ) x
k
i
bi aij x aij x
aii
j i
j i
k
j
k 1
j
Метод Horn-Schunck
I x It
k 1
u
1 k
k
I x I y vi , j
u
2 i, j
h
( i , j )Ш ( i , j )
1
I x2
2
( i , j )Ш ( i , j ) h
I y It
k 1
v
1
k
k
I x I y ui , j
v
2 i, j
( i , j )Ш ( i , j ) h
1
I y2
2
( i , j )Ш ( i , j ) h
i, j
Метод Якоби
i, j
Просто распараллеливается
Приближение на следующей итерации полностью определяется по
приближению на текущей итерации – нет зависимости между разными
пикселями
Метод Horn-Schunck
I x It
k 1
u
1
1
k
k 1
k
I x I y vi , j
u
u
2 i, j
2 i, j
( i , j )Ш ( i , j ) h
( i , j )Ш ( i , j ) h
1
I x2
2
( i , j )Ш ( i , j ) h
I y It
k 1
v
1
1
k 1
k 1
k
I x I y ui , j
v
v
2 i, j
2 i, j
( i , j )Ш ( i , j ) h
( i , j )Ш ( i , j ) h
1
I y2
2
( i , j )Ш ( i , j ) h
i, j
Метод
Гаусса-Зейделя
i, j
i,j+1
i-1,j
i,j
i,j-1
i+1,j
Ш (i, j )
Ш (i, j )
Нельзя напрямую использовать для параллельных
вычислений
Красно-черная схема ГауссаЗейделя
•Новое значение в красном узле
зависит только от текущих значений в
самом узле и в его «черных соседях»
•Новое значение в черном узле
зависит только от текущих значений в
самом узле и в его «красных соседях»
Новые значения в узлах одного
цвета можно вычислять
параллельно
Схема одной итерации
•Обновить значения в красных узлах
•Обновить значения в черных узлах
Аналогично можно сделать параллельную версию SOR
Метод Horn-Schunck
•Ядро выполняет одну итерацию итерационного метода
Схема вычислений
•Вычислить производные изображения (пространственные и
временные)
•Установить начальное приближение - нулевой поток
•Выполнить некоторое количество итераций одного из итерационных
методов
Новые значения сохраняются в массив, отличный от массива
со старыми значениями. В противном случае возникает конфликт
чтения-записи.
max xin 1 xin
i
max Ax n 1 i bi
i
критерий останова
МЕТОД BROX ET AL
T. Brox, A. Bruhn, N. Papenberg, J. Weickert
High accuracy optical flow estimation based on a theory for warping,
T. Pajdla and J. Matas (Eds.), European Conference on Computer Vision
(ECCV) Prague, Czech Republic, Springer, LNCS, Vol. 3024, 2536, May 2004
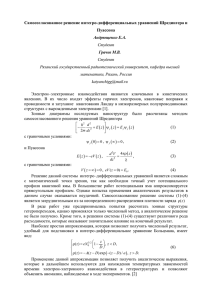
Метод Brox et al
Рассмотренные методы чувствительны к изменению освещения
Метод Brox et al
Рассмотренные методы чувствительны к изменению
освещения
Идея
•Рассмотреть другой data term
Предположение
Сохраняется градиент изображения
I ( x u, y v, t 1) I ( x, y, t ) 0
Плюс:
•градиент не чувствителен к аддитивному изменению яркости
Минус:
•чувствительность к шуму
Метод Brox et al
Рассмотренные методы чувствительны к изменению
освещения
Идея
•Рассмотреть другой data term
Предположение
Сохраняется градиент изображения
I ( x u, y v, t 1) I ( x, y, t ) 0
С самого начала ищутся только небольшие векторы смещения
Метод Brox et al
Рассмотренные методы чувствительны к изменению
освещения
Идея
•Рассмотреть другой data term
Предположение
Сохраняется градиент изображения
I ( x u, y v, t 1) I ( x, y, t ) 0
С самого начала ищутся только небольшие векторы смещения
Идея
Использовать нелинеаризованное уравнение сохранения яркости
Метод Brox et al
Тогда штраф за отклонение от предположений о сохранении яркости и
градиента яркости примет вид
EData (u, v) I (x w) I (x) I (x w) I (x) dxdy
2
2
Метод Brox et al
Проблема:
•квадратичный штраф чувствителен к выбросам
Метод Brox et al
Проблема:
•квадратичный штраф чувствителен к выбросам
Идея
Заменить квадратичный штраф выпуклой возрастающей функцией
(s 2 ) s 2 2
малый положительный параметр
Метод Brox et al
Получим новый функционал
EData
(u, v) I (x w) I (x)
2
I (x w) I (x) dxdy
2
Метод Brox et al
Предположение
Поток кусочно-гладкий
Штраф за отклонения от предположения о гладкости потока
ESmooth(u, v) 3u 3v dxdy
2
2
Метод Brox et al
Задача
Найти u и v, минимизирующие функционал
E (u, v) EData (u, v) ESmooth(u, v)
EData
(u, v) I (x w) I (x)
2
ESmooth(u, v) 3u 3v dxdy
2
2
I (x w) I (x) dxdy
2
Метод Brox et al
Уравнения Эйлера-Лагранжа
Введем обозначения:
I x : x I (x w )
I y : y I (x w )
I z : I (x w ) I (x)
I xx : xx I (x w )
I yy : yy I (x w )
I xz : x I (x w ) x I (x)
I yz : y I (x w ) y I (x)
Использование z вместо t говорит о том, что соответствующее
выражение НЕ производная, а разность, которую будем
минимизировать
Метод Brox et al
Уравнения Эйлера-Лагранжа
( I z2 ( I xz2 I yz2 )) ( I x I z ( I xx I xz I xy I yz ))
div( ( 3u 3v ) 3u ) 0,
2
2
( I z2 ( I xz2 I yz2 )) ( I y I z ( I yy I yz I xy I xz ))
div( ( 3u 3v ) 3v) 0
2
Граничные условия Неймана
2
Метод Brox et al
Численный метод
•Уравнения Эйлера-Лагранжа нелинейные
•Используем метод неподвижной точки для w
•Если есть смещения на расстояние, большее размера пикселя, то
функционал может иметь множество локальных минимумов
Идея
•Использовать пирамиду изображений
разного разрешения
Метод неподвижной точки
f ( x) x
x
n 1
f (x )
n
lim x
n
n 1
x
f (x ) x
*
*
*
Метод Brox et al
Численный метод
•Совместим метод неподвижной точки с масштабированием
•Масштабировать будем с коэффициентом (0,1)
•Для более плавного перехода от разрешения к разрешению
коэффициент выберем близким к 1
•Используем полную пирамиду изображений, начиная с
наименьшего возможного разрешения (например, с 10x10)
Метод Brox et al
Численный метод
Итерации по разрешению назовем внешними
Пусть k – номер изображения в пирамиде (0 – самое низкое разрешение)
w k (u k , v k ,1)T – решение на k-ой внешней итерации
' (( I zk 1 ) 2 (( I xzk 1 ) 2 ( I yzk 1 ) 2 )) ( I xk I zk 1 ( I xxk I xzk 1 I xyk I yzk 1 ))
2
2
div( ( 3u k 1 3v k 1 ) 3u k 1 ) 0
Осталась нелинейность в
k 1
•
I*
•
Метод Brox et al
Численный метод
Устранение нелинейности в производных изображения
I zk 1 I zk I xk du k I yk dv k
I xzk 1 I xzk I xxk du k I xyk dv k
I yzk 1 I yzk I xyk du k I yyk dv k
u k 1 u k du k , v k 1 v k dv k
Метод Brox et al
Численный метод
Введем обозначения
() kData : (( I zk I xk du k I yk dv k ) 2
(( I xzk I xxk du k I xyk dv k ) 2 ( I yzk I xyk du k I yyk dv k ) 2 ))
()
k
Smooth
2
2
: ( 3 (u du ) 3 (v dv ) )
k
k
k
k
Метод Brox et al
Численный метод
Аппроксимация слагаемого с дивергенцией
div( k u )i , j
ui 1, j ui , j
ui , j ui 1, j
1
ki 1 , j
ki 1 , j
2
h 2
h
h
ui , j 1 ui , j
ui , j ui , j 1
1
ki , j 1
ki , j 1
2
2
h
h
h
Метод Brox et al
Численный метод
Аппроксимация smooth term
Метод Brox et al
Численный метод
Аппроксимация smooth term
Метод Brox et al
Численный метод
Аппроксимация smooth term
Метод Brox et al
Численный метод
Аппроксимация smooth term
Метод Brox et al
Численный метод
Аппроксимация smooth term
u i 1 , j ui 1, j ui , j
2
2
2
u i , j 1 ui , j 1 ui , j
2
2
2
ui 1, j 1 ui , j 1 ui 1, j 1 ui , j 1
2
2
ui 1, j 1 ui 1, j
2
ui 1, j 1 ui 1, j
2
2
2
Метод Brox et al
Численный метод
Оставшаяся нелинейность в Ѱ устраняется повторным применением
метода неподвижной точки
Начальные значения
w 0 (0,0,1)T , du k ,0 0, dv k ,0 0
,l
0 ( ) kData
( I xk ( I zk I xk du k ,l 1 I yk dv k ,l 1 )
I xxk ( I xzk I xxk du k ,l 1 I xyk dv k ,l 1 ) I xyk ( I yzk I xyk du k ,l 1 I yyk dv k ,l 1 ))
,l
div ( ) kSmooth
3 (u k du k ,l 1 )
Полученная система уравнений
•линейная
•может быть решена одним из рассмотренных методов
Метод Brox et al
Решение линейной системы
Используем красно-черный метод релаксации (Red-Black SOR)
duik ,l ,m 1 (1 )duik .l ,m
k ,l
k
k ,l , m
k ,l
k
(
)
(
u
du
)
(
)
u
S
i
j
j
j
S
i
j
i
jШ ( i )
jШ ( i )
jШ (i ) (S )ik,l j
(D ) ik ,l
( )
k ,l
D i
(( I xk,i ) 2 (( I xyk ,i ) 2 ( I xxk ,i ) 2 ))
(( I xk,i I yk,i ( I xxk ,i I xyk ,i I xyk ,i I yyk ,i )) dvik ,l ,m I xk,i I zk,i ( I xxk ,i I xzk ,i I xyk ,i I yzk ,i ))
( )
jШ ( i )
k ,l
S i j
(D ) ik ,l
(( I xk,i ) 2 (( I xyk ,i ) 2 ( I xxk ,i ) 2 ))
Граничные условия
du k ,l ,m
0, dv k ,l ,m
0
Метод Brox et al
Решение линейной системы
Используем красно-черный метод релаксации (Red-Black SOR)
duik ,l ,m 1 (1 )duik .l ,m
k ,l
k
k ,l , m
k ,l
k
(
)
(
u
du
)
(
)
u
S
i
j
j
j
S
i
j
i
jШ ( i )
jШ ( i )
jШ (i ) (S )ik,l j
(D ) ik ,l
( )
k ,l
D i
(( I xk,i ) 2 (( I xyk ,i ) 2 ( I xxk ,i ) 2 ))
(( I xk,i I yk,i ( I xxk ,i I xyk ,i I xyk ,i I yyk ,i )) dvik ,l ,m I xk,i I zk,i ( I xxk ,i I xzk ,i I xyk ,i I yzk ,i ))
( )
jШ ( i )
k ,l
S i j
(D ) ik ,l
(( I xk,i ) 2 (( I xyk ,i ) 2 ( I xxk ,i ) 2 ))
Метод Brox et al
Билинейная интерполяция для I(x+w)
Метод Brox et al
Реализация
•Кадры храним в виде текстур
•Для продолжения решения с разрешения k на разрешение k+1
используем текстуры
Общая схема метода
Подготовить текстуры с изображениями
Задать начальное значения для u и v
•Для каждого разрешения, начиная с наименьшего
•Установить начальное значение du, dv
•Подготовить данные для итераций SOR
•Выполнить некоторое число итераций SOR
•Обновить u, v
•Продолжить решение на большее разрешение
•Сохранить результат
Метод Brox et al
Реализация
•Кадры храним в виде текстур
•Для продолжения решения с разрешения k на разрешение k+1
используем текстуры
Общая схема метода
Подготовить текстуры с изображениями
Задать начальное значения для u и v
•Для каждого разрешения, начиная с наименьшего
•Установить начальное значение du, dv
•Подготовить данные для итераций SOR
•Выполнить некоторое число итераций SOR
•Обновить u, v
•Продолжить решение на большее разрешение
•Сохранить результат
warping FP iteration
lagged nonlinearity FP iteration
solver FP iteration
Метод Brox et al
•Сложные шаблоны доступа к памяти
•Большая часть данных не меняется во время итераций
Используем текстуры
Текстуры + shared memory работает медленнее чем просто текстуры
Для объединения запросов при записи индексы начала строк округляем
до значений, кратных 16
Дополнительные материалы:
•http://www.google.com
•http://www.mia.uni-saarland.de
•http://vision.middlebury.edu/flow/