Кинематика точки
реклама

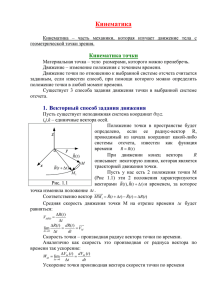
Литература. 1. Матвеев А.Н. Механика и теория относительности. – М., Высшая школа, 1986г. 2. Сивухин Д.В. Общий курс физики (т.1). Механика. – М., Наука, 1989г. 3. Савельев И.В. Курс физики (т.1). Механика и молекулярная физика. – М., Наука, 1989г. 4. Гершензон Е.М., Малов Н.Н. Курс общей физики (т.1). Механика. – М., Просвещение, 1979г. 5. Иродов И.Е. Основные законы механики. – М., Высшая школа, 1978г. МЕХАНИКА Механика – наука о движении и равновесии тел. Под механическим движением понимают изменение положения материальных тел в пространстве с течением времени. Знать движение тела – это значить, указать положение любой точки тела в любой момент времени. Принципы (аксиомы) механики впервые были сформулированы Ньютоном. Механика Ньютона справедлива для медленных движений макроскопических тел. Под медленным или нерелятивистским понимают движение, скорость которого мала по сравнению со скоростью движения света в вакууме ( <<c, где с=3,00.108 м/с). Движения, скорости которых близки скорости света в вакууме, называют быстрыми или релятивистскими. Макроскопическими называют тела, состоящие из громадного количества молекул или атомов. ОСНОВНЫЕ ПОНЯТИЯ МЕХАНИКИ, МОДЕЛИ Материальная точка – геометрическая точка, снабжённая массой (имеющая массу). Абсолютно твёрдое тело – тело, расстояния между любыми точками которого в процессе движения остаётся неизменным. Пространство описывается Евклидовой геометрией. Наиболее важные свойства пространства: - однородность (одинаковые свойства пространства в различных его областях); - безграничность; - изотропность (одинаковые свойства пространства при различных направлениях его рассмотрения). В силу однородности и безграничности пространства нельзя говорить о перемещении материального тела, не указав, относительно какого это перемещение произошло, иными словами – движение относительно. Тело, относительно которого рассматривается перемещение называется телом отсчёта. Тело отсчёта должно иметь свойство абсолютно твёрдого тела. С телом отсчёта жестко связывается система координат, которая определяет пространство, связанное с телом отсчета. Пространство – бесконечная совокупность точек, связанная с системой отсчета. Рассматриваемое пространство является трехмерным: каждой точке пространства поставлены в соответствие 3 числа – координаты точки. Для наблюдателя пространство, в котором он находится, неподвижно. В физике используются декартовая система координат (координаты точки x, y, z), цилиндрическая система координат (координаты точки , , z ) и сферическая система координат (координаты точки , , ). 1 Для описания двухмерного пространства используется полярная система координат (координаты точки , ). Под временем в количественном смысле этого слова понимают показания какихлибо часов. Часы – любое тело или система тел, в которых совершается периодически процесс, служащий для измерения времени. В механике Ньютона время течет одинаково во всех системах отсчёта. Часы могут быть механические, молекулярные, кварцевые, атомные. Системой отсчета называют тело отсчета, жестко связанную с ним систему координат и часы. Единицей измерения времени в СИ (система интернациональная) является секунда (с). Первоначально секунда была принята за интервал времени, равный 1/86400 средних солнечных суток. В настоящее время: 1 секунда – промежуток времени , в течении которого совершается 9 192 631 770 периодам электромагнитного излучения, соответствующего переходу между двумя сверхтонкими уровнями основного состояния атома цезия-133 в отсутствии внешних полей. Единицей измерения длины в СИ является метр (м). Первоначально за метр была принята длина, равная одной десятимиллионной части четверти земного меридиана. В настоящее время: 1 метр – длина пути прохождения светом в вакууме в течение временного интервала 1/299792458 с. Механика состоит из следующих разделов: МЕХАНИКА КИНЕМАТИКА КИНЕТИКА ДИНАМИКА СТАТИКА Кинематика изучает механическое движение без исследования причин, которые это движение вызывают. Кинетика состоит из динамики и статики. В динамике изучаются причины, которые вызывают механическое движение. Законы равновесия тел изучаются в статике. КИНЕМАТИКА ТОЧКИ Способы задания движения точки Под точкой в кинематике понимают геометрическую точку. Движение точки можно задать тремя способами. КООРДИНАТНЫЙ СПОСОБ Рассмотрим движение точки М в декартовой системе координат. Для определения положения точки М достаточно задать ее координаты. Под координатами данной точки будем понимать координаты той точки пространства, с которой совпадает эта точка. Если положение точки М с течением времени относительно системы координат XYZ меняется, то координаты являются функциями времени: x x(t ) y y (t ) z z (t ) (1.1) 2 Уравнения (1.1) называются кинематическими уравнениями движения точки. Функции x(t), y(t), z(t) должны быть: - однозначными (т.к. конкретному моменту времени соответствует единственное положение точки в пространстве); - дважды дифференцируемыми (точка в любой момент времени должна иметь определенные скорость и ускорение). Декартовые координаты не являются единственно возможными. Существуют сферические, цилиндрические и полярные координаты. В цилиндрических, сферических и полярных системах координат соответствующие координаты будут функциями времени. Траекторией точки называют геометрическое место точек пространства, через которое точка проходит в процессе движения. Чтобы получить уравнение траектории нужно из системы уравнений (1.1) исключить время. ВЕКТОРНЫЙ СПОСОБ При этом способе положение точки определяется радиусом-вектором r , начало которого совпадает с началом системы координат XYZ, а конец – с той точкой пространства, в которой располагается точка. Если точка движется с течением времени относительно систе- мы координат, то r r (t ) – кинематическое уравнение движении точки. Разложив радиус-вектор по ортам, получим: r x(t )i y(t ) j z (t )k , k i j 1. i , j , k где – единичные вектора: (1.2) ЕСТЕСТВЕННЫЙ СПОСОБ Пусть известна траектория точки. В этом случае можно поступить так: на траектории выбирают начало отсчета 0 и задают направление увеличения естественной координаты S. При движении точки вдоль траектории ее естественная координата зависит от времени: S S (t ) – кинематическое уравнение движения (закон движения точки по траектории). В этом случае зависимость радиуса-вектора от времени можно записать в виде сложной функции: r r S t Скорость точки и ее нахождение при различных способах движения точки Важным параметром, характеризующим движение, является скорость перемещения точки. Для определения этого понятия рассмотрим движение точки, заданное векторным уравнением: r r (t ) . (1.3) Пусть в некоторый момент времени t положение точки М определяется радиусом вектором r . За промежуток времени ∆t точка перемещается в положение, определяемое ра диусом-вектором r (t t ) . Вектор, характеризующий перемещение точки характеризующий перемещение точки r r (t t ) r (t ) . r Составим отношение . Вычислим предел t этого отношения в предположении, что промежуток времени t стремиться к нулю: r (t t ) r (t ) dr (t ) lim – скорость t 0 t dt точки в момент времени t. Скорость равна первой производной по времени от радиус-вектора. 3 Научимся вычислять скорость при трёх способах задания движения. ПРИ ВЕКТОРНОМ СПОСОБЕ: Задано r r (t ) . Исходя из определения скорости, при векторном способе она определяется соотношением: dr (1.4) dt ПРИ КООРДИНАТНОМ: Ранее было записано разложение радиус-вектора r по ортам: r x(t )i y(t ) j z (t )k (1.5) Также по ортам можно разложить скорость точки: xi y j z k . (1.6) Используя (1.4), получим: dr dx dy dz i j k , dt dt dt dt d i d j dk 0 . поскольку dt dt dt (1.7) Сравнивая (1.6) и (1.7), и зная, что для равенства двух векторов необходимо и достаточно равенство их соответствующих проекций: x dy dx dz ; z ; y . dt dt dt (1.8) Модуль вектора скорости определяется по формуле: x2 y2 z2 (1.9) Направление скорости определяется направляющими косинусами вектора : cos( , i ) x ; y cos( , j ) ; cos( , k ) z ; (1.10) ПРИ ЕСТЕСТВЕННОМ СПОСОБЕ: S=S(t) – задано. Находим: r r S lim lim ; t 0 t t 0 S t При t 0 S 0 : S r lim lim ; t 0 t S 0 S r lim – единичный вектор касания. S 0 S S dS t 0 t dt lim 4 Следовательно: Величина dS dt (1.11) dS есть проекция скорости на естественную координату . dt Модуль скорости dS 1 , , т.к. 1 ; тогда cos( , ) dt (1.12) т.е. скорость направлена по касательной к траектории (в ту же или противопо ложную сторону направления вектора касания ). Ускорение точки и его нахождение при различных способах задания движения При движении точки её скорость, вообще говоря, изменяется со временем. Поэтому необходимо ввести величину, которая полностью смогла бы охарактеризовать изменение скорости. Для этого рассмотрим движение точки М, заданное в виде: r r (t ) Наглядность поведения r r (t ) достигается тем, что радиус-векторы точки М имеют начало в одной точке 0. Изменения вектора так наглядно не изображается, т.к. эти векторы приложены к различным точкам траектории. Выберем какую-либо точку О’ и перенесём все векторы скорости параллельно самим себе, так чтобы их начала совпадали с точкой О’. Тогда концы вектора с течением времени определят непрерывную (т.к. вектор изменяется непрерывно) кривую, называемую годографом вектора скорости. На рис б) непрерывной линией изображён годограф вектора скорости. Аналогично этому траекторию точки называют годографом радиуса-вектора. Вектор (t t ) (t ) d a (t ) lim – ускорение точки в момент времени t. (1.13) t 0 t dt Научимся вычислять скорость при трёх способах задания движения. ПРИ ВЕКТОРНОМ СПОСОБЕ Задано r r (t ) Исходя из определения ускорения, при векторном способе оно определяется соотношением: 2 d d dr a (t ) d r a ; dt 2 dt dt dt (1.14) ПРИ КООРДИНАТНОМ СПОСОБЕ Задано: 5 x x(t ) y y (t ) z z (t ) Разложим a по ортам: a (t ) a x (t )i a y (t ) j a z (t )k (1.15) С другой стороны, из (1.14) следует: d2 a (t ) 2 dt di поскольку dt x(t)i y(t) j z(t)k d dtx(t) i d dty(t) j d dtz(t) k , 2 2 2 2 2 (1.16) 2 d j dk 0 . dt dt Для равенства двух векторов необходимо и достаточно, чтобы были равны их проекции. Сравнивая (1.15) и (1.16): a x (t ) d 2 x(t ) d 2 y (t ) d 2 z (t ) ; a ( t ) . a ( t ) ; z y dt 2 dt 2 dt 2 (1.17) Модуль ускорения находится по формуле: 2 2 d 2x d 2 y d 2z 2 2 2 a a a x a y a z . или a 2 2 2 dt dt dt 2 (1.18) Направляющие косинусы: cos( a , i ) cos( a , i ) cos( a , i ) d 2x dt 2 2 2 d 2x d 2 y d 2z 2 2 2 dt dt dt 2 ; d2y dt 2 2 2 2 ; 2 2 . d 2x d 2 y d 2z 2 2 2 dt dt dt (1.19) d 2z dt 2 2 d 2x d 2 y d 2z 2 2 2 dt dt dt ПРИ ЕСТЕСТВЕННОМ СПОСОБЕ Задано S=S(t). Скорость при естественном способе задания движения dS . По dt определению ускорения: d d 2 S dS d a 2 . (1.20) dt dt dt dt Направление вектора зависит от значения естественной координаты S. Поскольку S (t ). , то: 6 d d dS dt dS dt (1.21) Подставляя (1.21) в (1.20): 2 d 2 S dS d a 2 dt dt dS d – определяется лишь характером dS (1.22) кривой линии. d lim dS S 0 S Угол между касательными называют углом смежности ( – угол смежности). Выясним направление вектора d . dS Устремим ∆S → 0. Проведем плоскость через и точку М’. Будем приближать точку М’ к точке М. При этом указанная плоскость будет поворачиваться и в пределе найдём некоторое положение, которое называется соприкасающейся плоскостью. d Вектор ┴ и лежит в соприкасающейся плоскости, он направлен в сторону воdS гнутости кривой. Нормаль, лежащая в соприкасающейся плоскости называется главной d нормалью. Найдем модуль : dS d 1 lim ; ; S dS S 0 S 1 ; где – радиус кривизны траектории в рассматриваемой точОтсюда lim S 0 S d n , где n - единичный вектор главной нормали, направлен в сторону вогнутости ке М. dS траектории. После подстановки в (1.22): 2 d 2 S dS n a 2 dt dt (1.23) Составляющие ускорения определяют как: d 2S a – тангенциальное ускорение. dt 2 d d 2S d a 2 ; a – данный результат получен с учетом (1.12). dt dt dt Если =const, то a = 0, следовательно a – отвечает за изменение модуля скорости; a = 0 – только при равномерном движении (движение при =const); a – к форме траектории никакого отношения не имеет. 7 2 dS n an ; dt 2 an n; – нормальное ускорение. Нормальное ускорение a n определяет форму траектории и направлено в сторону во- гнутости кривой. При прямолинейном движении → ∞ и a n =0. Частные случаи движения точки РАВНОМЕРНОЕ ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ Равномерное прямолинейное движение математически задается const. Найдем кинематическое уравнение движения точки в этом случае. уравнением dr По определению . Отсюда dr dt . dt Проинтегрируем полученное соотношение: r t d d ; т.к. const , то r r0 (t t0 ) . r0 (1.24) t0 Перепишем полученное соотношение (уравнение движение точки в векторном виде) следующим образом: r r0 t и r r0 (t t0 ) Если t0 0 , уравнение движения точки в векторном виде имеет вид: r r0 t (1.25) Данное уравнение в проекциях запишется в виде: x x0 xt y y0 y t – уравнения движения точки в проекциях на декартовы оси координат. z z0 z t ДВИЖЕНИЕ С ПОСТОЯННЫМ УСКОРЕНИЕМ Условие движения с постоянным ускорением математически задается уравнением a const . Найдем выражение для скорости и уравнения движения точки при ее движении с постоянным ускорением (выражения получены для условия t0 = 0): x 0 x a x t y 0 y a y t z 0 z a z t axt 2 x x0 0 x t 2 2 a yt 2 dr at ; проинтегрировав r r0 0t ; y y0 0 y t ; dt 2 2 azt 2 z z0 0 z t 2 d a ; проинтегрировав 0 at ; dt (1.26) ДВИЖЕНИЕ С ПОСТОЯННЫМ ТАНГЕНЦИАЛЬНЫМ УСКОРЕНИЕМ 8 Условие движения с постоянным тангенциальным ускорением математически задается уравнением a = const. Найдем выражение для проекции скорости и кинематическое уравнение движения точки. a d ; 0 a t ; dt (1.27) a t 2 dS 0 a t; S S 0 0 t ; dt 2 9