3.01.13 -
advertisement

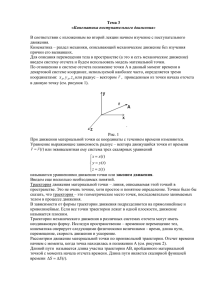
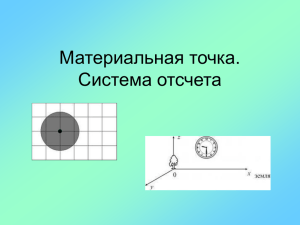
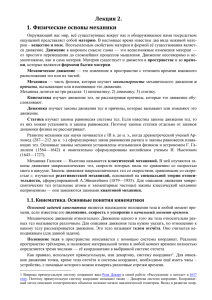
Лекция 7. КИНЕМАТИКА ТОЧКИ Механическое движение − изменение положения одного тела относительно другого (тела отсчета), с которым связана система координат, называемая системой отсчета. Основными задачами кинематики точки являются: Описание способов задания движения точки. Определение кинематических характеристик движения точки (скорости, ускорения) по заданному закону движения Геометрическое место последовательных положений движущейся точки в рассматриваемой системе отсчета называется траектория точки. Задать движение − это дать способ, с помощью которого можно определить положение точки в любой момент времени по отношению к выбранной системе отсчета. К основным способам задания движения точки относятся: векторный, координатный и естественный. 1.Векторный движения способ задания Положение точки определяется радиусвектором, проведенным из неподвижной точки, связанной с телом отсчета: r r t − векторное уравнение движения точки. . t Скорость и ускорение точки Рассмотрим перемещение точки за малый промежуток времени r r ( t t ) r ( t ) −Тогда средняя скорость точки за промежуток времени . v ср r t Скорость точки в данный момент времени находится как предел средней скорости при t 0 Среднее ускорение характеризует изменение вектора скорости за малый промежуток времени t v a ср t Ускорение точки в данный момент времени находится как предел среднего ускорения при t 0 v dv a lim t 0 t dt Скорость точки − это кинематическая мера ее движения, равная производной по времени от радиус-вектора этой точки в рассматриваемой системе отсчета. Вектор скорости направлен по касательной к траектории точки в сторону движения. dr v dt Ускорение точки − это мера изменения ее скорости, равная производной по времени от скорости этой точки или второй производной от радиус-вектора точки по времени. Ускорение точки характеризует изменение вектора скорости по величине и направлению. Вектор ускорения направлен в сторону вогнутости траектории. 2 dv d r a 2 dt dt 2.Координатный способ задания движения В этом случае задаются координаты точки как функции времени: уравнения движения точки в координатной форме. x x t , y y t , z z t ; Это и параметрические уравнения траектории движущейся точки, в которых роль параметра играет время . Чтобы записать ее уравнение форме, надо исключить из них , в явной t В случае исключив t пространственной получим: F1 x, y, z 0, F2 x, y, z 0. траектории, В случае плоской траектории исключив или получим x x t , y y t , y x , F ( x, y ) 0 t 7.3. Определение скорости и ускорения точки при координатном способе задания движения Связь векторного способа задания движения и координатного дается соотношением r xi yj zk Из определения скорости: dr d dx dy dz v xi yj zk i j k dt dt dt dt dt Проекции скорости на оси координат равны производным соответствующих координат по времени v x x v y y v z z Модуль скорости определяется выражением v v x2 v 2y v z2 Из определения ускорения: dv d a x i y j zk xi yj zk dt dt Проекции ускорения на оси координат равны вторым производным соответствующих координат по , времени: . a x x a z z a y y Модуль ускорения определяется выражением: a 2 ax 2 ay 2 az 3. Естественный способ задания движения В этом случае задаются: 1)траектория точки, 2)начало отсчета на траектории, 3) положительное направление отсчета, 4)закон изменения дуговой координаты s st 3) положительное направление отсчета, 2)начало отсчета на траектории, 1)траектория точки, s st Естественные оси (касательная, главная нормаль, бинормаль) − это оси подвижной прямоугольной системы координат с началом в движущейся точке. Их положение определяется траекторией движения. Касательная с единичным вектором направлена по касательной в положительном направлении отсчета дуговой координаты и находится как предельное положение секущей, проходящей через данную точку. M1 M M M1 O Нормальная плоскость перпендикулярна касательной. Линия пересечения нормальной и соприкасающейся плоскостей − главная нормаль. Единичный вектор главной нормали в сторону вогнутости траектории. n направлен b Бинормаль с единичным вектором направлена перпендикулярно касательной главной нормали так, что орты образуют правую тройку векторов n b и Координатные плоскости введенной подвижной системы координат (соприкасающаяся, нормальная и спрямляющая) образуют естественный трехгранник, который перемещается вместе с движущейся точкой, как твердое тело. Его движение в пространстве определяется траекторией и законом изменения дуговой координаты. СКОРОСТЬ ТОЧКИ ПРИ ЕСТЕСТВЕННОМ СПОСОБЕ ЗАДАНИЯ ДВИЖЕНИЯ dr r r s v lim lim dt t 0 t t 0 s t r lim t 0 s − единичный вектор касательной ds v dt v s v s Алгебраическая скорость− проекция вектора скорости на касательную, равная производной от дуговой координаты по времени. Если производная положительна, то точка движется в положительном направлении отсчета дуговой координаты. ОПРЕДЕЛЕНИЕ СКОРОСТИ ТОЧКИ ПРИ ЕСТЕСТВЕННОМ СПОСОБЕ ЗАДАНИЯ ДВИЖЕНИЯ dr r r s v lim lim dt t 0 t t 0 s t ds v dt r lim t 0 s v s v s Алгебраическая скорость − проекция вектора скорости на касательную, равная производной от дуговой координаты по времени. Если производная положительна, то точка движется в положительном направлении отсчета дуговой координаты. УСКОРЕНИЕ ТОЧКИ ПРИ ЕСТЕСТВЕННОМ СПОСОБЕ ЗАДАНИЯ ДВИЖЕНИЯ dv d d a s s s dt dt dt 1 d d d nk n ds d ds d n d d k ds 1 k единичный вектор главной нормали кривизна траектории радиус кривизны траектории в данной точке M1 s 𝜏 M 1 𝑛 O 2 s a s n вектор ускорения раскладывается на две составляющие – касательное и нормальное ускорения a a an a s v 2 v an a s v 2 v an n алгебраическое значение касательного ускорения (проекция вектора ускорения на касательную) характеризует изменение скорости по величине; нормальное ускорение (проекция вектора ускорения на нормаль) характеризует изменение скорости по направлению Вектор ускорения всегда лежит в соприкасающейся плоскости, проекция ускорения на бинормаль равна нулю ab 0 Движение точки ускоренное, если знаки проекций векторов скорости и ускорения на касательную совпадают M a v n an a