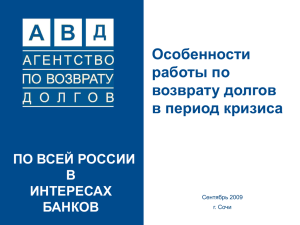
Окно настройки параметров ПИД – регулятора скорости
реклама

Синтез системы управления асинхронизированным вентильным двигателем подъемной установки с применением средств автоматизированного проектирования Аспирантка НТУУ «КПИ» Белая Л.В. Научный руководитель проф. д.т.н. Чермалых В.М. Старший преподаватель НТУУ «КПИ», к.т.н. Торопов А.В. Асинхронизированный вентильный двигатель Отличительной особенностью АВД является то, что обмотка возбуждения питается от автономного инвертора напряжения (АИН) трехфазным переменным током низкой фиксированной частоты и тем самым создается вращающееся магнитное поле уже при неподвижном роторе. Обмотка статора (якоря) питается от преобразователя частоты ПЧС. Структурная схема классической системы управления асинхронизированного вентильного двигателя КРТ Uз.с. Wр.с.( p) Uз.м. Wр.м.( p) 1 Кт Id T p1 1 Км Кс М 1 Jp Структурная схема асинхронизированного вентильного двигателя с векторным управлением Окно настройки параметров ПИД – регулятора скорости блока PID Характер переходного процесса при начальных значениях параметров ПИД регулятора Переходной процесс по выходной координате в линеаризованном контуре регулирования скорости после осуществления параметрического синтеза Параметры синтезированного ПИД – регулятора блока PID w,rad/s Переходной процесс в линеаризованной системе при подаче ступенчатого сигнала задания по скорости 120 100 80 60 40 20 0 0 0.2 0.4 0.6 0.8 1 t,s 1.2 1.4 1.6 1.8 2 Переходной процесс по скорости в нелинейном контуре при подаче ступенчатого сигнала задания 120 100 w, rad/s 80 60 40 20 0 0 0.2 0.4 0.6 0.8 1 t,s 1.2 1.4 1.6 1.8 2 Переходной процесс в нелинейном контуре при использовании регулятора скорости, обеспечивающего настройку на технический оптимум 120 100 w,rad/s 80 60 40 20 0 0 0.2 0.4 0.6 0.8 1 t,s 1.2 1.4 1.6 1.8 2 Настройка качества переходного процесса Процедура автоматической настройки и выбор оптимальных параметров ПИ - регулятора График последовательной оптимизации График переходного процесса по скорости в нелинейной системе при использовании блока Constraint 120 100 w,rad/s 80 60 40 20 0 0 0.2 0.4 0.6 0.8 1 t,s 1.2 1.4 1.6 1.8 2 Выводы: При использовании регулятора скорости, синтезированного с учетом нелинейностей математической модели АВД в системе имеет место затягивание переходного процесса, по сравнению с регулятором скорости, синтезированным для линеаризованной системы. 2. В контуре регулирования скорости обеспечивается апериодический характер изменения выходной величины без резких изменений ускорений. 3. Применение САПР MATLAB позволяет осуществить параметрический синтез регулятора скорости для АВД подъемной установки, обеспечивающего высокое качество регулирования при учете нелинейностей контура. 1.