Кулеев Р., Фофанов В.
реклама

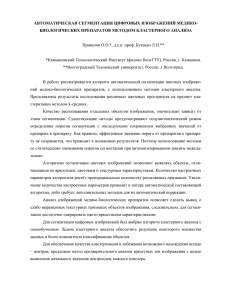
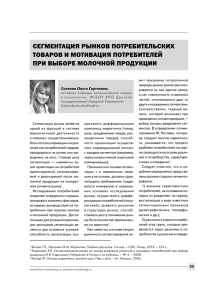
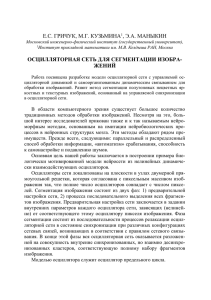
117 ОБ ОДНОМ ОБОБЩЕНИИ МЕТОДОВ СЕГМЕНТАЦИИ КВАНТИЛЕЙ И МОД НА СЛУЧАЙ НЕСКОЛЬКИХ ИЗОБРАЖЕНИЙ Р.Ф. Кулеев1, В.Б. Фофанов2 1 Казанский государственный университет; 420008, Казань, ул. Кремлевская, д. 18; т. (843) 2315453; e-mail: [email protected] 2 Казанский государственный университет; 420008, Казань, ул. Кремлевская, д. 18; т. (843) 2315453; e-mail: [email protected] Предлагаются обобщения известных методов квантилей и мод сегментации сцены на случай, когда исходной информацией о ней служат несколько изображений. Представлены результаты компьютерных экспериментов по сегментации модельных и псевдореальных сцен с использованием предложенных методов. Введение Довольно часто в ходе дешифрирования приходится использовать геометрические признаки. В этом случае обязательным этапом дешифрирования является сегментация. Она позволяет построить для каждого присутствующего на сцене объекта его проекцию, по которой вычисляются геометрические признаки. К сожалению, в большинстве известных методов сегментации предполагается, что исходной информацией о сцене служит ее единственное изображение. Поэтому в этих методах используется в явной (или скрытой) форме чрезвычайно наглядное отношение порядка, определенное на множестве R вещественных чисел. Одним из путей повышения эффективности дешифрирования является привлечение дополнительной информации о сцене за счет измерения в каждом ее пикселе одновременно нескольких свойств. В этом случае каждый пиксель сцены описывается векторной ( -мерной) случайной величиной, а исходной информацией для дешифрирования служит набор из изображений. Далее он будет называться векторным изображением сцены. К сожалению, перенос известных методов сегментации на случай, когда исходной информацией о сцене служит ее векторное изображение, наталкивается на серьезные ν трудности. В самом деле, задать на R отношение порядка такое же наглядное, как на R , пока не удается. В настоящей работе предлагаются обобщения известных методов квантилей и мод для сегментации сцены по ее векторному изображению. В их основе лежит понятие случайного расстояния, задаваемого на множестве векторных случайных величин. Его определение и свойства изложены в [1]. Модель сцены Далее приведено краткое описание модели сцены, изложенной в работе [2]. Будем рассматривать сцену как множество пикселей, каждый из которых характеризуется целочисленными координатами z ( z1 , z2 ) , задаваемыми на целочисленной решетке Z 2 и -мерной случайной величиной z ( zj )1 j . Для любых z Z 2 и 1 j скалярная случайная величина zj определена на некотором вероятностном пространстве (, A, P) и принимает значения в конечном множестве Y . Сцена состоит из объектов. Объект определяется конечным 2 подмножеством A Z , называемым его проекцией, и семейством A ( a ) aA векторных случайных величин. 118 Объединение проекций всех объектов совпадает с Z 2 . Для любых , z Z 2 1 j , можно вычислить и j, реализацию случайной координаты j j x z z ( ) . Назовем изображением сцены x : Z 2 Y , векторное отображение определяемое равенством xz ( xzj )1 j , а изображением объекта A - сужение x A изображения x на A . Будем предполагать, что случайные величины, образующие сцену, взаимно независимы, а случайные величины, образующие объект A , имеют одно и то же распределение со средним значением mA (mAj )1 j . Также будем считать, что у соседних объектов A и B разные векторы средних значений: d (mA , mB ) 0 . Пусть C Z 2 - квадрат, назовем его границей Fr (C ) совокупность точек из C , имеющих соседей в Z 2 \ C . Семейство случайных величин назовем зоной С ( z ) zC интереса объекта A , если A C \ Fr (C ) , если все z , z C \ A , имеют одно и то же распределение и если d (mA , mC \ A ) 0 . Пусть d - борелевское расстояние на R . А ( j )1 j и ( j )1 j векторные случайные величины на вероятностном пространстве (, A, P) . В этом случае отображение d ( , ) : R , определяемое равенством d ( , )( ) d ( ( ), ( )) , так же будет случайной величиной на (, A, P) . При каждом будут выполняться аксиомы расстояния. Это позволяет назвать случайным d расстоянием на множестве -мерных случайных величин, а d ( , ) - случайным расстоянием между и . Обобщение методов сегментации Кругом на Z 2 с центром в точке z Z 2 и радиусом r называется подмножество B ( z , r ) из Z 2 , определяемое равенством B ( z , r ) = {t Z 2 : d ( z, t ) r} . B( z , r ) A Если ( B( z, r ) C \ A ), то среднее арифметическое x z , определяемое равенством xz 1 xt | B( z , r ) | tB ( z ,r ) является оценкой m A (соответственно mC \ A ). С другой стороны, среднее x Fr (C ) , арифметическое определяемое равенством x Fr (C ) = 1 xz , | Fr (C ) | zFr ( C ) так же будет оценкой mC \ A . Можно показать, что при достаточно большом радиусе r почти для всех a A и z C \ A выполняется неравенство d ( xa , x Fr (C ) ) d ( x z , x Fr ( C ) ) 0 . Следовательно, после упорядочивания пикселей зоны интереса по возрастанию расстояний d ( x z , xFr (C ) ) , z C , пиксели, образующие объект, окажутся в самом конце. Поэтому для сегментации достаточно знать только площадь заданного объекта. Описанный способ сегментации зоны интереса по ее векторному изображению естественно рассматривать как обобщение (векторный вариант) метода квантилей. Так же естественно обобщается и метод мод. В самом деле, если распределение случайной величины d ( x z , x Fr (C ) ) = I A ( z )d ( x a , x Fr (C ) ) + I C \ A ( z )d ( xc , x Fr (C ) ) является бимодальным, то в качестве порога сегментации можно использовать точку локального минимума. 119 Сегментация модельных и псевдореальных сцен Для иллюстрации возможностей векторных методов сегментации вначале воспользуемся фрагментом сцены, для которой выполняются все предположения, сформулированные при построении модели. Такие сцены будут называться далее модельными. Проекцией фрагмента является квадрат со стороной равной 256 пикселям. Каждый пиксель является 3мерной случайной величиной с независимыми компонентами, распределенными по нормальному закону. Фрагмент состоит из пяти элементов. Четыре элемента являются прямоугольниками со сторонами параллельными осям координат и 2 параметрами (m j , j ) , 1 j 4 . Они будут называться объектами. Остальные пиксели образуют пятый элемент с параметрами (m0 , 02 ) , который назовем фоном. Мерой качества скалярного изображения зоны интереса служит отношение сигнал/шум k j , определяемое равенством kj | m0 m j | 0 j , 1 j 4. За меру качества векторного изображения предлагается использовать величину k , k = k1 ... k . В качестве эффективности сегментации рассматривалась вероятность ошибки классификации одного пикселя. Результаты сегментации векторным методом квантилей зон интереса для четырех объектов модельной сцены представлены в таблице 1. Таблица 1. Метод квантилей k 1 2 3 0.5 0,392 0,355 0,312 1.0 0,229 0,152 0,098 1.5 0,112 0,050 0,021 2.0 0,026 0,005 0,002 Как и ожидалось, с ростом k и количества используемых изображений вероятность ошибки уменьшается. Ее можно уменьшить еще больше, если предварительно применить сглаживание исходного изображения. Вероятности ошибок сегментации методом квантилей со сглаживанием по кругу с r 1 приведены в таблице 2. Таблица 2. Метод квантилей ( r 1 ) k 1 2 3 0.5 0,095 0,055 0,038 1.0 0,023 0,011 0,005 1.5 0,008 0,003 0,003 2.0 0,007 0,003 0,002 Отметим, что аналогичные результаты получаются и при сегментации векторным методом мод. Применимость теоретических результатов для решения прикладных задач определяется, главным образом, адекватностью математической модели реальной сцене. Очевидно, что сделанные при построении математической модели предположения не всегда выполняются для реальных сцен. Поэтому результаты сегментации модельных сцен требовалось сравнить с результатами сегментации реальных сцен с похожими свойствами. Для этого в качестве фрагмента реальной сцены был выбран квадратный участок земной поверхности, заросший травой, кустарником и редкими деревьями. Оптико-электронной системой с летательного аппарата были получены изображения сцены в трех спектральных зонах оптического диапазона. По условиям съемки, сторона квадратного пикселя на местности должна равняться 0,3 м. Предполагалось, что на сцене расположены объекты прямоугольной формы с известными размерами, но случайной ориентацией и координатами. Средние значения и дисперсии этих объектов соответствовали средним значениям и дисперсиям реальных объектов, присутствующих на сцене. Такая сцена будет называться далее псевдореальной. Для выявления зависимости результатов сегментации от количества используемых изображений сегментация каждой зоны интереса проводилась вначале по каждому 120 На рис.3 представлены результаты сегментации тех же зон интереса, но по трем изображениям. Используются те же обозначения. Анализ приведенных данных показывают, что вероятность ошибки сегментации на модельной сцене во всех экспериментах ниже вероятности ошибки, полученной для псевдореальной сцены. По-видимому, причиной этого явления служит явная неоднородность свойств псевдореальной сцены, о которой свидетельствует большое количество пятен, встречающихся в разных местах изображений зон интереса. 0,2 Вероятность ошибки скалярному изображению, затем с использованием двух изображений и, наконец, по всем трем изображениям. В каждом эксперименте подсчитывалось фактическое отношение сигнал/шум и соответствующая оценка вероятности ошибки сегментации. Затем была смоделирована модельная сцена с такими же объектами и отношениями сигнал/шум. На компьютере были построены три ее изображения и проведены эксперименты по сегментации зон интереса по уже описанному сценарию. На рис.1 представлены результаты сегментации в зависимости от величины отношения сигнал/шум с использованием только одного изображения. Точками обозначены вероятности ошибки в отдельных экспериментах, а штриховой линией тенденция, соответствующие псевдореальной сцене. Для модельной сцены используются ромбы и сплошная линия. 0,16 0,12 0,08 y = 0,0292e-0,0445x 0,04 y = 0,011e-0,0002x 0 Вероятность ошибки 0,2 0 0,16 2 3 4 5 Сигнал/шум 6 7 Рис. 3. Обобщенный метод квантилей ( 8 3 ). 0,12 0,08 -0,3824x y = 0,111e 0,04 y = 0,0256e-0,1979x 0 0 1 2 3 4 5 Сигнал/шум 6 Рис. 1. Обобщенный метод квантилей ( 7 8 1 ). На рис.2 с помощью тех же символов представлены результаты сегментации зон интереса с использованием двух изображений. 0,2 Вероятность ошибки 1 0,16 0,12 0,08 -0,2177x y = 0,0707e 0,04 y = 0,0118e-0,0092x 0 0 1 2 Чем больше значение отношения сигнал/шум, тем меньше отличаются вероятности ошибок сегментации модельной и псевдореальной сцен. При разность между ними не k 3.0 превосходит 0.02 . Заключение Предложены обобщения известных методов квантилей и мод сегментации сцены на случай, когда исходной информацией о ней служит набор изображений. Приведены результаты компьютерных экспериментов по сегментации модельных и псевдореальных сцен. Есть основания полагать, что векторные варианты методов смогут найти применение при дешифрировании изображений реальных сцен. Список литературы 3 4 5 Сигнал/шум 6 Рис. 2. Обобщенный метод квантилей ( 7 8 2 ). 1. В.Б. Фофанов. Случайное расстояние и его применения в дешифрировании изображений // Материалы IX Международной конференции 121 «Интеллектуальные системы и компьютерные науки» (23-27 октября 2006 г.), том 2, часть 2. – М.: Изд-во механико-математического факультета МГУ, 2006, с. 286-288. 2. В.Б. Фофанов. Формализация сцены в задаче дешифрирования многозональных изображений // Оптический журнал. – 2007. – том 74, №3. – с. 51-54.