Дифференциальные и интегральные уравнения 205
реклама

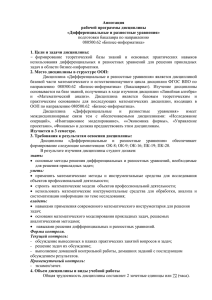
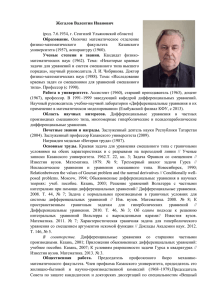
Дифференциальные и интегральные уравнения 205 НЕКОРРЕКТНАЯ ПРОДОЛЖИМОСТЬ РЕШЕНИЙ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ С ПОСЛЕДЕЙСТВИЕМ Сурков П.Г.1 e-mail: [email protected] Задача продолжимости решения в положительном направлении времени для дифференциальных уравнений с последействием рассматривалась многими авторами [1, 2, 3], а для линейных дифференциальных уравнений изучена достаточно полно. Для продолжимости решения назад ситуация существенно меняется, так как продолжимость имеет место только для некоторого класса решений, называемых двусторонними [4]. В этом сообщении задача продолжимости решения назад рассматривается как некорректная. Для её решения используется метод регуляризации Тихонова [5]. Подобный подход для линейных дифференциальных уравнений с постоянным запаздыванием развивался в работе [6]. 1. Постановка задачи. Рассматривается линейное стационарное дифференциальное уравнение с последействием dx(t) = dt Z0 dη(s)x(t + s), t ∈ R+ = (0, +∞), (1) −r где x:[−r, +∞)→ Rn ; r > 0; элементы матричной функции η являются функциями с ограниченными изменениями на [−r,0]. Уравнение (1) для начального момента t0 =0 и произвольной начальной функции ϕ ∈ C([−r,0], Rn ) имеет единственное решение x(·,ϕ):[−r,+∞) → Rn , удовлетворяющее начальному условию x(s,ϕ)=ϕ(s) при s∈[−r,0] [3]. Определим функциональные элементы решения xt(·,ϕ)=x(t+·,ϕ), t>0, как элементы пространства C([−r,0], Rn ) [7]. Отображения T (t):ϕ→xt (·,ϕ), t>0, являются непрерывными [3]. Они позволяют корректно по заданной предыстории ϕ находить элементы истории xt (·,ϕ) динамического процесса. Обратные отображения T −1 (t), t>0 1 Работа выполнена в рамках Программы ведущих научных школ России (проект НШ-7581.2006.1) и Программы поддержки фундаментальных исследований Президиума РАН (№22 Процессы управления“). ” 206 Труды XXXVIII Молодежной школы-конференции не являются непрерывными и задача восстановления предыстории по элементу истории является некорректной. При решении задачи восстановления предыстории удобно от пространства C([−r,0], Rn ) перейти к сепарабельному гильбертовому пространству состояний H = H[−r,0]= Rn × L2 ([−r,0], Rn ) со скалярным произведением R0 hψ, ϕiH =ψ | (0)ϕ(0)+ ψ | (s)ϕ(s)ds. Это возможно, так как опера−r торы T (t), t>0, допускают непрерывные расширения на пространство H [8]. При построении расширений обозначения операторов не меняются. Задача продолжения решения назад сводится к задаче восстановления предыстории по элементу истории динамического процесса. В этой задаче исходная информация описывается функцией x = x(·) ∈ H формирующей элемент истории динамического процесса. Отвечающая ей предыстория ϕt ∈ H должна находиться как решение уравнения T (t)ϕ = x, t > 0. (2) Последнее уравнение имеет решение не для всех функций x(·) ∈ H, так как произвольный элемент множества H может моделировать элемент истории динамического процесса только приближенно. В таком случае речь идёт о приближенном восстановлении предыстории процесса, т.е. о приближенном решении задачи продолжения решения линейного стационарного дифференциального уравнения с последействием в сторону убывания времени. Для решения поставленной задачи будем использовать метод регуляризации Тихонова. 2. Регуляризация задачи. В уравнении (2) функция x представляет собой произвольный элемент пространства H и её можно рассматривать как информацию xδ = x о некоторой точной истории xT , заданную с определённой погрешностью δ, hxT −xδ , xT −xδ i 6 δ 2 . Выбор этой погрешности δ и определит значение регуляризующего оператора (РО), определяющего приближенный элемент предыстории. Согласно методу А.Н. Тихонова [5], построения РО для уравнения (2) сводится к поиску элемента ϕα , минимизирующего функционал M α [ϕ, xδ , t] = hT (t)ϕ − xδ , T (t)ϕ − xδ iH + αΩ[ϕ], α > 0. Здесь Ω[ϕ] — стабилизирующий функционал следующего вида (3) Дифференциальные и интегральные уравнения Ω[ϕ] = ϕ| (0)Gϕ(0) + R0 207 (ϕ| (s)Qϕ(s) + ϕ̇| (s)P ϕ̇(s)) ds, где G, Q, P — −r положительно-определённые n× n-матрицы, а параметр α определяется как функция допустимой погрешности δ из уравнения невязки hT (t)ϕα − xδ , T (t)ϕα − xδ iH = δ 2 . (4) Элемент ϕα минимизирующий функционал (3) определяет значение регуляризующего оператора R(xδ , δ). При этом α определяется уравнением невязки (4). Решая задачу минимизации, получим систему уравнений для нахождения элемента ϕα (T ∗ (t)T (t)ϕ)(s) + α(Qϕ(s) − P ϕ00 (s)) = (T ∗ (t)xδ )(s), (T ∗ (t)T (t)ϕ)(0) + α(Gϕ(0) + P ϕ0 (0)) = (T ∗ (t)xδ )(0), ϕ0 (−r) = 0, s ∈ [−r, 0], t > 0. (5) Здесь T ∗ (t) — оператор, сопряженный к T (t). 3. Явная форма системы уравнений (5). Используя явные представления операторов T (t) и T ∗ (t), уравнения (5) можно переписать в виде Φ0 (t, θ)ϕ(0) + R0 Φ(t, θ, s)ϕ(s)ds + αQϕ(θ) − αP ϕ00 (θ) = f (t, θ), −r Ψ0 (t)ϕ(0) + R0 Ψ(t, s)ϕ(s)ds + αGϕ(0) + αP ϕ0 (0) = g(t), −r где z 0 (−r) = 0, θ ∈ [−r, 0], t > r и Φ0 (t, θ) = K | (t, θ)V (t) + R0 K | (t + s, θ)V (t + s)ds, −r Φ(t, θ, s) = K (t, θ)K(t, s) + | Ψ0 (t) = V | (t)V (t) + Ψ(t, s) = V | (t)K(t, s) + R0 −r R0 −r R0 f (t, θ) = K | (t, θ)ϕ(0) + R0 −r V | (t + s)V (t + s)ds, V | (t + s1 )K(t + s1 , s)ds1 , −r g(t) = V | (t)ϕ(0) + K | (t + s1 , θ)K(t + s1 , s)ds1 , R0 K | (t + s, θ)ϕ(s)ds, −r V | (t + s)ϕ(s)ds, θ ∈ [−r, 0], t > r. 208 Труды XXXVIII Молодежной школы-конференции 1 0.8 0.6 0.4 0.2 -1 -0.8 -0.6 -0.4 -0.2 Рис. 1: Численный эксперимент Здесь K(t, α) = V (t)η(α) − V (t − r)η(α − r) − Rα α−r dV (z) dz z=t+s−α η(s)ds, V — матричная функция Коши, являющаяся матричным решением уравнения (1), удовлетворяющим начальным условиям V (t) = 0, t ∈ [−r, 0), V (0) = In , где In — единичная матрица порядка n. 4. Пример. Рассмотрим скалярное уравнение x0 (t) = bx(t − 1), t > −1, с заданной на интервале [−1, 0] историей xT (s) = bes + 1 − be−1 . Значение регуляризующего оператора R(u, δ) соответствующей некорректной задачи есть функция z1 , удовлетворяющая системе дифференциальных уравнений z10 = z2 , z20 = pq z1 + 1 αp ψ − 1 αp x1 , ψ 0 = −bϕ, ϕ0 = bz1 (6) с краевыми условиями z2 (−1) = 0, ψ(−1) + αb(gz1 (0) + pz2 (0)) = x1 (−1), ψ(0) = bϕ(0), ϕ(−1) = z1 (0), (7) где x1 (s) = −b2 es + (b2 e−1 − b)s + b2 (2 − e−1 ) + b, s ∈ [−1, 0]. При решении краевой задачи (6), (7) применялся метод преобразования Лапласа. Был проведён численный эксперимент, при этом в качестве параметров системы и стабилизирующего функционала были Дифференциальные и интегральные уравнения 209 приняты значения p = 1, q = 3, g = 1, b = 1. Значение регуляризующего оператора было вычислено для различных значений параметра стабилизации α. Также были вычислены нормы разности z1 − x−1 значения регуляризующего оператора R(u, δ(α)) = z1 и истинной предыстории x−1 в пространствах H = R × L2 ([−1, 0], R) и C = C([−1, 0], R). При α = 10−5 имеем ||z1 − x−1 ||H = 0, 0060911 и ||z1 − x−1 ||C = 0, 0329383. На рис. 1 приведены графики, где по оси абсцисс откладывается t, а по оси ординат z1 и x−1 . График функции z1 изображён чёрным цветом, а функции x−1 — серым. Список литературы [1]. Беллман Р., Кук К. Дифференциально-разностные уравнения. — М.: Мир, 1967. 548 c. [2]. Мышкис А.Д. Линейные дифференциальные уравнения с запаздывающим аргументом. — М.: Наука, 1972. 352 c. [3]. Хейл Дж. Теория функционально-дифференциальных уравнений. — М.: Мир, 1984. 424 c. [4]. Муровцев А.Н., Мышкис А.Д. О двусторонних решениях линейных дифференциально-функциональных уравнений // Дифференциальные уравнения. 1990. Т. 26, № 2. C. 246–250. [5]. Тихонов А.Н., Арсенин В.Я. Методы решения некорректных задач. — М.: Наука, 1986. 288 c. [6]. Долгий Ю.Ф., Путилова Е.Н. Продолжение назад решений линейного дифференциального уравнения с запаздыванием как некорректная задача // Дифференциальные уравнения. 1993. Т. 29, № 8. C. 1317–1323. [7]. Красовский Н.Н. Некоторые задачи теории устойчивости движения. — М.: Физматгиз, 1959. 211 c. [8]. Долгий Ю.Ф. Характеристическое уравнение в задаче устойчивости периодических систем с последействием // Изв. Урал. Гос. Ун-та. 1998. № 10. (Математика и механика. Вып. 1.) C. 34–43.