РАВНОВЕСИЕ ТВЕРДЫХ ТЕЛ
реклама

Федеральное агентство железнодорожного транспорта
Уральский государственный университет путей сообщения
Кафедра мехатроники
В. И. Гребенников
РАВНОВЕСИЕ ТВЕРДЫХ ТЕЛ
Екатеринбург
2008
Федеральное агентство железнодорожного транспорта
Уральский государственный университет путей сообщения
Кафедра мехатроники
В. И. Гребенников
РАВНОВЕСИЕ ТВЕРДЫХ ТЕЛ
Учебно-методическое пособие по курсу «Теоретическая
механика» для студентов всех специальностей дневной и
заочной форм обучения
Екатеринбург
2008
2
УДК 531.1
Г 79
Гребенников В. И. Равновесие твердых тел: Учеб.-метод. пособие. – Екатеринбург: УрГУПС, 2008. – 45 с.
Изложены основные принципы статики материальной точки, твердого тела и системы тел. Подробно рассмотрены законы равновесия тел и способы их
практического использования. Два десятка простых задач иллюстрируют применение законов статики в конкретных ситуациях.
Пособие составлено в соответствии с учебным планом по дисциплине
«Теоретическая механика» и предназначено для студентов всех специальностей
дневной и заочной форм обучения.
Одобрено и рекомендовано к изданию на заседании кафедры «Мехатроника», протокол № 37 от 21.11.2007 г.
Автор:
В. И. Гребенников, профессор кафедры «Мехатроника»,
д-р физ.-мат. наук, УрГУПС
Рецензенты:
Е. А. Памятных, профессор кафедры теоретической физики,
д-р физ.-мат. наук, УрГУ;
В. К. Першин, зав. кафедрой физики,
д-р физ.-мат. наук, проф., УрГУПС
© В. И.Гребенников, 2008
© УрГУПС, 2008
3
ВВЕДЕНИЕ
В учебно-методическом пособии в краткой форме излагаются простые
принципы равновесия материальных точек и твердых тел конечных размеров,
как изолированных, так и взаимодействующих между собой, т. е. рассматриваются задачи, составляющие предмет статики курса теоретической механики.
Стационарное, или равновесное, состояние системы тел, безусловно, играет особую роль в механике и в жизни. Все строительные конструкции предназначены для работы в статическом режиме, кроме того, они должны обладать
необходимым запасом прочности по отношению к воздействию различных
внешних сил.
Простота основных положений и огромное количество действительно
важных практических задач статики привело к тому, что статика твердого тела
в традиционных курсах излагается как самостоятельная дисциплина со своей
собственной аксиоматикой и множеством теорем. Нам представляется более естественным строить теорию равновесия на основе двух фундаментальных законов природы: сохранения импульса и момента импульса, которые имеют место
везде, как в статике, так и в динамике механических систем. Но не только. Эти
законы применимы в электротехнике, электронике, оптике, материаловедении,
они работают в микромире и космосе.
Данное пособие написано в помощь студентам, изучающим курс теоретической механики. Оно не заменяет лекции, практические занятия и тем более
самостоятельную работу, а призвано лишь очертить круг необходимых понятий, дать основные сведения по ключевым вопросам курса и представить практические методы, используемые для решения базовых задач статики конструкций. Его можно использовать как элементарный справочник по статике твердых
тел.
Статика – раздел общей механики, в котором изучаются условия относительного равновесия механических систем. Очень важным понятием является
взаимодействие тел, которое описывается на языке сил. Комбинация этих сил
порождает все многообразие задач механики. Сила – векторная величина. Мы
надеемся, что читатели знакомы в общих чертах с действиями над векторами в
рамках курса математики. Тем не менее в первых разделах пособия приводятся
элементарные сведения из векторной алгебры, на примере момента импульса
весьма подробно излагается понятие векторного произведения и его свойства.
В пособии рассмотрено два десятка задач, иллюстрирующих практическое применение основных законов равновесия в конкретных системах. В них
исследуются как идеальные модели, так и более реалистические ситуации, в которых учитываются силы трения.
4
1. СТАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ
1.1. Сила и ее вектор
Мысленно выделенная часть тела, столь малая, что положение ее в пространстве определяется положением одной точки, называется материальной
частицей. Если материальная частица рассматривается как самостоятельное
бесконечно малое тело, то она называется материальной точкой. Взаимодействие, вызывающее изменение механического движения материальных частиц
или препятствующее изменению их взаимных положений, называется механическим взаимодействием. Мера механического воздействия на материальную
частицу со стороны других материальных объектов (тел или полей), характеризующая величину и направление этого воздействия, называется силой, приложенной к данной материальной частице в данный момент времени. Величина
силы измеряется в ньютонах положительным числом Р. Сила изображается отС резком, выходящим из геометрической точки М (рис. 1), определяющей положение
A
материальной частицы; эта точка называетR
ся точкой приложения силы. По длине этот
P
отрезок в условном масштабе равен велиα
чине Р силы и своим направлением МА укаβ
B
зывает направление механического воздейM
Q
ствия, измеряемого этой силой.
Рис. 1
Силы, приложенные к одной и той же
материальной частице, обладают следующими свойствами: 1) совокупность нескольких сил, приложенных в одной и той же точке, может быть заменена одной силой, называемой их равнодействующей, и наоборот, одна сила может
быть заменена совокупностью сил, приложенных к той же точке и называемых
составляющими или компонентами данной силы; 2) равнодействующая двух
сил, приложенных к одной точке, изображается диагональю параллелограмма,
сторонами которого служат отрезки, изображающие данные силы (рис. 1). Это
значит, что отрезок, изображающий силу, является физическим вектором1, а потому он называется вектором силы.
Вектор R равнодействующей двух сил определяется через их векторы P и
Q формулой
R = P + Q,
(1)
а ее величина R и углы α и β, составляемые вектором R с векторами P и Q, – равенствами:
1
Следует различать понятия физического и математического вектора. Последний
можно параллельным переносом перемещать в любую точку пространства, поэтому он задается тремя координатами. Физический вектор имеет фиксированную точку приложения. Для
его описания требуется 6 координат. Совсем не одно и то же, когда вас тянут с одинаковым
усилием вверх за руку или за волосы.
5
R = P 2 + Q 2 + 2 PQ cosθ ;
sin α = (Q / R)sin θ ; sin β = ( P / R )sin θ ,
(2)
где θ = α + β .
Если в точке приложено n сил P1 , P2 , ..., Pn , то вектор R равнодействующей выражается векторной суммой:
R = P1 + P2 + ... + Pn .
(3)
Если на прямой, по которой расположен вектор Р силы, выбран единичный орт е, то величину Р силы условно считают числом алгебраическим, т. е.
Р > 0, если Р направлен в ту же сторону, что и е, и Р < 0 — в противном случае,
и тогда вектор Р силы записывается формулой
Р = Ре.
Если через точку приложения силы Р провести три, не лежащие в одной
плоскости оси – хх, уу, zz с ортами е1, е2, е3, то силу Р можно разложить на три
компонента Р1, Р2, Р3, лежащих на осях хх, уу, zz и имеющих алгебраические величины Р1, Р2, Р3, так что
P = P1e1 +P2e 2 +P3e3 .
Значения Р1, Р2, Р3 определяются формулами:
( P , e 2 × e3 )
(P, e3 × e1 )
(P, e1 × e 2 )
.
(4)
P1 =
, P2 =
, P3 =
(e1 , e 2 , e3 )
(e1 , e 2 , e3 )
(e1 , e 2 , e3 )
И наоборот, величина Р силы определяется через алгебраические величины Р1, Р2, Р3 ее компонентов равенством
(5)
P = P12 + P2 2 + P32 + 2 PP
1 2 cos(e1 , e 2 ) + 2 P2 P3 cos(e 2 , e3 ) + 2 P3 P1 cos(e3 , e1 ) .
Если вектор Р силы лежит в плоскости двух осей, например в плоскости
ху, то компонент по третьей оси считается равным нулю: Р3 = 0.
Проекцией силы на ось (рис. 2) называется проP
изведение величины силы на косинус угла ее вектора с
осью проекции:
PL = (P, l ) = P cos(P ∧ l ) ,
(6)
PL
где l — орт оси LL проекции.
L
L
Если сила Р разложена на компоненты по осям
l
хх, уу, zz с ортами е1, е2, е3, то проекции Рx, Рy, Рz выраРис. 2
жаются формулами:
Px = P1 + P2 cos(e 2 , e1 ) + P3 cos(e3 , e1 );
Py = P1 cos(e1 , e 2 ) + P2 + P3 cos(e3 , e 2 );
(7)
Pz = P1 cos(e1 , e3 ) + P2 cos(e 2 , e3 ) + P3 .
В частности, если оси хх, уу, zz взаимно перпендикулярны, то
Px = P1; Py = P2 ; Pz = P3 , т. е. проекции на три взаимно перпендикулярные оси
равны алгебраическим значениям компонентов силы по тем же осям. Величина
и направление вектора силы в этом случае определяются равенствами:
6
P = P12 + P2 2 + P32 ;
(8)
cos(P ∧ xx) = Px / P; cos(P ∧ yy ) = Py / P; cos(P ∧ zz ) = Pz / P .
1.2. Уравновешенные на точке силы
Если сумма векторов сил P1 , P2 ,..., Pn , приложенных к одной точке, равна
нулю – P1 + P2 + ... + Pn = 0 , то такие силы называют уравновешенными на точке.
Наличие уравновешенных на точке сил не изменяет механического состояния точки, и потому во всех задачах механики к точке можно прикладывать
и от нее откидывать любую систему уравновешенных сил. Аналитически условие уравновешенности сил на точке выражается через их проекции на три не
лежащие в одной плоскости оси – хх, уу, zz формулами:
n
∑P
k =1
kx
= 0;
n
∑P
k =1
ky
= 0;
n
∑P
k =1
kz
= 0.
(9)
Формулы (9) называются уравнениями равновесия материальной точки.
Задача 1. Найти радиус-вектор r положения равновесия точки А, притягиваемой к n неподвижным центрам Ak с радиусами-векторами rk силами, пропорциональными расстояниям точки до центров притяжения.
Решение. Здесь силы равны Pk = μk (rk − r ) , где μk — факторы пропорциональности. Следовательно, уравнение равновесия имеет вид:
n
∑ μ (r
k =1
k
k
n
− r ) = 0 , откуда r = ∑ μk rk
k =1
n
∑μ
k =1
k
.
Задача 2. Через гвоздь, вбитый в стену, переброшен трос (рис. 3, а). Один
конец троса прикреплен к полу под углом 30° к горизонту. К другому концу
троса подвешен груз весом Р = 100 Н. Определить силу реакции стены, в которую вбит гвоздь. Весом гвоздя пренебречь. Трос расположен в вертикальной
плоскости.
Решение. Предварительно рассмотрим равновесие груза. К грузу приложены: вес Р, направленный по вертикали вниз, и сила реакции троса Т, направленная по вертикали вверх (рис. 3, б). Воспользовавшись вторым законом статики о равновесии твердого тела под действием двух сил, получим
Т = Р = 100 Н.
Переходим к рассмотрению равновесия гвоздя. Мысленно рассекая левую
и правую ветви троса вблизи гвоздя, заменим действие отброшенных частей
троса его силами реакций Т1 и Т2 (рис. 3, в). Силы Т1 и T2 равны по модулю силе Т, но различны по направлению. Связью, наложенной на гвоздь, является
стена.
Гвоздь находится в равновесии под действием задаваемых сил Т1 и Т2 и
силы реакции R стены, направление которой неизвестно. Так как линии действия этих трех сил пересекаются в одной точке, то можно построить силовой
треугольник на силах Т1, Т2 и R. В данном силовом треугольнике две силы из-
7
вестны как по модулю, так и по направлению. Проведя из произвольной точки
О силу Т1, приложим к ее концу силу Т2 (рис. 3, г) и, соединив конец В силы Т2 с началом
О, определяем силу реакции
стены R из замкнутого силового треугольника ОАВ.
Для решения силового
треугольника ОАВ воспользув)
емся вспомогательными построениями. Проведем из точки
T2
В направо горизонталь и продолжим ОА по вертикали вниз
до пересечения с горизонталью
Рис. 3
в точке D. В треугольнике ABD
угол ABD равен углу наклона
левой ветви троса к горизонту, т. е. 30°. Следовательно, угол BAD равен 60°.
Угол BAD является внешним по отношению к силовому треугольнику ОАВ. Заметив, что силовой треугольник ОАВ является равнобедренным (силы Т1 и T2
1
по модулю равны), имеем: ∠OBA = ∠BOA = ∠BAD = 30° . Теперь из треуголь2
ника ОАВ без труда находим искомый модуль R силы реакции R стены:
R = BO = BA cos 30° + AO cos30° = 2T cos 30° = 173 H .
1.3.
Равновесие точки на гладкой поверхности и гладкой линии
Если точка по условию задачи должна оставаться на заданной материальной поверхности в состоянии покоя при действии на эту точку заданной силы
Р, то действие поверхности на точку должно измеряться силой R, которая вместе с силой Р должна уравновеситься, т. е. Р + R = 0. Эта сила R называется реакцией поверхности. Если по физическим свойствам поверхности вектор R при
всех условиях нормален к поверхности (рис 4), то эта поверхность называется
гладкой. Если уравнение заданной гладкой поверхности относительно прямоугольных осей хуz есть
f(х, у, z) = 0, то условия равновесия точки под действием заданной силы Р выражаются формулами:
∂f
∂f
∂f
Px + λ
= 0; Py + λ
= 0; Pz + λ
= 0,
(10)
∂x
∂y
∂z
где λ — неизвестный множитель. Из этих уравнений
и уравнения поверхности определяются координаты
х, у, z положения равновесия и фактор λ.
Рис. 4
Если точка при действии на нее заданной силы Р должна оставаться на линии пересечения двух гладких поверхностей, то
8
возникнут две реакции – R1 и R2, нормальные к этим поверхностям, так что
Р + R1 + R2 = 0. Равнодействующая R = R1 + R2 называется реакцией заданной
линии: она к этой линии нормальна.
Задача 3. Груз весом Р удерживается в равновесии на гладкой наклонной
плоскости посредством параллельной ей нити (рис. 5, а).
Определить давление груза на плоскость и силу реакции нити, если наклонная плоскость образует угол α с горизонтом. Груз считать материальной
точкой.
в)
O
D
T
P α
B
R
K
A
Рис. 5
Решение. Рассмотрим равновесие груза. Задаваемой силой является вес
груза Р, направленный по вертикали вниз. На груз наложены две связи – наклонная плоскость и нить. Применив принцип освобождаемости от связей,
мысленно отбросим связи и заменим их действие на груз соответствующими
силами реакций связей. Сила реакции нити Т направлена вдоль нити вверх, сила реакции гладкой наклонной плоскости R направлена по нормали к плоскости
(рис. 5, б).
Теперь можно рассмотреть груз как свободное твердое тело, к которому
приложены три силы: Р, Т и R, линии действия которых пересекаются в одной
точке. Для равновесия твердого тела необходимо и достаточно, чтобы сумма
этих сил равнялась нулю, т. е. силовой треугольник был замкнутым.
Начинаем построение силового треугольника с силы Р (рис. 5, в), известной как по модулю, так и по направлению. Выбрав произвольную точку О вне
основного рисунка, изображаем силу Р. Затем к концу силы Р приложим начало
следующей силы, например нормальной силы реакции плоскости R. Направление силы R нам известно. Проведем через конец силы Р прямую AD, параллельную линии действия силы R. На этой прямой надо отложить силу R, но модуль ее неизвестен. Для продолжения же построения силового треугольника
следует к концу силы R приложить начало силы Т. Однако выход из этого затруднения находится легко. Так как силовой треугольник при равновесии груза
должен быть замкнут, то конец силы Т должен совпасть с началом О силы Р.
Поэтому достаточно через начало силы Р провести прямую ОК, параллельную
линии действия силы Т. В точке В пересечения прямых AD и ОК находится конец силы R и начало силы Т.
Итак, силовой треугольник ОАВ построен. Остается его решить. Нетруд9
но видеть, что угол ОАВ равен углу α, так как их стороны взаимно перпендикулярны, а угол АВО является прямым, так как линии действия сил R и Т взаимно
перпендикулярны. Из треугольника ОАВ находим
R = P cos α ; T = P sin α .
Искомое давление груза на наклонную плоскость равно по модулю нормальной силе реакции R и направлено ей противоположно.
1.4. Момент силы
Мера механического воздействия, учитывающая положение силы по отношению к некоторой выбранной точке и выражающаяся векторным произведением радиуса-вектора точки приложения силы относительно выбранной точки на вектор этой силы, называется моментом силы относительно данной точки. Момент изображается вектором, приложенным в данной точке, называемой
центром момента (рис. 6):
M O (PA ) = OA × P = r × P .
(11) С
B
Модуль вектора момента называется величиной момента. Он измеряется единицами
P
размерности [сила] · [длина] = Н·м и выражаетM
h
ся произведением величин силы Р на расстояA
ние h от центра момента до прямой действия
r
силы, называемое плечом силы относительно
O
данного центра:
Рис. 6
M O = Ph = Pr sin(P ∧r ) .
(12)
Треугольник ОАВ с вершиной в центре момента и основанием, изображающим вектор силы, называется моментным. По определению векторного
произведения величина момента равна удвоенной площади этого треугольника.
Вектор момента направляется перпендикулярно к плоскости моментного
треугольника в такую сторону от нее, при наблюдении из которой вектор Р силы указывает поворот вокруг центра момента против хода часовой стрелки.
Если линия действия силы проходит через центр момента, то величина
момента равна нулю.
Если центр момента взят в точке (x0, y0, z0), то через координаты (x, y, z)
точки и проекции X, Y, Z силы Р вектор момента выражается определителем
i
j
k
M O (P ) = x − x0 y − y0 z − z0
(13)
X
Y
Z
При переносе центра момента из точки О в точку О' вектор момента преобразуется по формуле
M O (P) = M O ' (P) + OO '× P .
(14)
Отсюда следует, что проекции векторов момента около двух центров на
ось, соединяющую эти центры, равны между собой.
10
Проекция вектора момента силы на данную ось называется моментом силы относительно (около) этой оси. Аналитически это выражается равенством
M LL (P) = (M O (P) ⋅ l ) ,
(15)
где l – единичный вектор вдоль оси LL.
В частности, моменты силы около координатных осей выражаются формулами:
y z
M xx (P) =
= yZ − zY ; M yy (P) = zX − xZ ; M zz (P ) = xY − yX .
(16)
Y Z
Момент силы около оси равен нулю, если вектор силы лежит в одной
плоскости с осью, т. е. ее пересекает или ей параллелен.
Если сила Р лежит на плоскости ху и приложена в точке А(х, у, 0), то
M xx = M yy = 0 , M zz (P) = xY − yX и вектор момента имеет всего одну проекцию,
т. е. превращается в алгебраическую величину.
L
Момент силы РА около оси LL (рис. 7)
можно вычислить непосредственно, спроектировав вектор Р силы на плоскость, перпендикуP
ML
лярную к оси LL, и вычислив алгебраическую
M
величину момента этой проекции Р' около точP'
ки пересечения плоскости проекции с осью
моментов, устанавливая знак момента наблюдением с положительного конца оси LL.
L
Задача 4. В точке А (х = 5 м, у = 7 м) приложена сила F = 8 кН, составляющая угол α =
Рис. 7
75о с осью х. Вычислить момент силы относительно начала координат. Найти плечо силы.
Решение. Воспользуемся формулой (16):
M z = xFy − yFx = F ( x sin α − y cos α ) .
Подстановка численных значений дает Mz =24.1 кН·м. Момент направлен
по оси Oz.
2. СТАТИКА ТВЕРДОГО ТЕЛА
2.1
.Свойства внешних сил, приложенных к твердому телу
Всякое тело в механике рассматривается как совокупность материальных
точек. Если расстояния между любыми материальными точками тела остаются
неизменными при механических воздействиях, то тело называется абсолютно
твердым или, короче, твердым. Силы, измеряющие действие на точки данного
тела других тел, называются внешними, приложенными к данному телу. Совокупность внешних сил, которая, будучи приложена к твердому телу, не изменяет механического состояния тела, называется уравновешенной на данном теле.
11
В частности, уравновешенная система, будучи приложена к твердому телу, находящемуся в состоянии покоя, не выводит тело из этого состояния.
Во всех задачах механики твердого тела к нему можно прикладывать и от
него откидывать любую уравновешенную систему внешних сил. Совокупность
сил, которая, будучи добавлена к данной системе сил, составит вместе с ней
уравновешенную систему сил, называется уравновешивающей данную. Две системы сил, уравновешивающиеся одной и той же системой сил, называются эквивалентными. Во всех задачах механики твердого тела данную систему сил
можно заменять ей эквивалентной. Об уравновешенной системе сил говорят,
что она эквивалентна нулю.
Если к двум точкам твердого тела приложены по одной прямой две равные по величине и противоположные по направлению силы, то они уравновешиваются на этом теле, и наоборот, если две силы взаимно уравновешиваются
на твердом теле, то они имеют равные величины и направлены по одной прямой в противоположные стороны. Из этого свойства следует, что данная сила
эквивалентна другой силе, вектор которой равен вектору данной, а точка приложения перенесена в любую точку на линии данной силы. Поэтому в геометрической статике твердого тела вектор внешней силы рассматривается не как
приложенный в определенной точке, а как скользящий по заданной прямой. Если данная сила R служит равнодействующей системы сил P1 , P2 ,..., Pn , приложенных к той же точке А, то она этой системе эквивалентна. Если данная система P1 , P2 ,..., Pn преобразуется в систему Q1 , Q 2 ,..., Q m при помощи переноса сил
по линиям их действия, сложения и разложения сил, приложенных к одной точке, прибавления и откидывания уравновешенных систем сил, то данная и полученная системы будут эквивалентны.
Если действие тела II (рис. 8) на тело I измеряется силой РA, то действие тела I на тело II измеряется силой QB , коII
III
торая равна по величине силе РA и наP
Q
правлена по одной прямой АВ с этой сиAA
B
лой в противоположную сторону. В этом
состоит закон равенства действия и
противодействия.
Рис. 8
Если твердое тело по условию задачи должно опираться на другие твердые тела или быть с ними соединено натянутыми нитями, то такое тело называется несвободным, а ограничения, стесняющие движения несвободного тела и
осуществляемые другими телами, называются связями, наложенными на несвободное тело. Силы, измеряющие действие на несвободное тело тех тел, которые
осуществляют наложенные связи, называются реакциями связей.
Реакция нити направлена вдоль нити от тела. Реакция опорной поверхности направлена от поверхности в ту сторону, где находится тело. Если реакция
опорной поверхности направляется обязательно по нормали к поверхности в
12
точке опоры (см. рис. 4), то поверхность называется гладкой. В противном случае реакция RA (рис. 9) раскладывается на компонент NA по нормали к поверхности и перпендикулярный к нему компонент FA. Компонент NA называется
нормальным сопротивлением поверхности. Компонент FA измеряет противодействие возможному скольжению тела по опорной поверхности и называется
силой трения скольжения. Отношение величины силы трения скольжения при
движении тела к величине нормального сопротивления называется коэффициентом трения скольжения. Отношение величины силы трения к величине силы
нормального сопротивления при покое тела называется коэффициентом статического трения. Статический коэффициент несколько больше коэффициента
трения скольжения. Угол максимального отR
клонения реакции опорной поверхности от
N
нормали, тангенс которого равен коэффициенту статического трения, называется углом трения, а конус с вершиной в точке касания тела с
опорной поверхностью, образующие которого
указывают максимальные отклонения реакции
F
от нормали опорной поверхности, называется
A
конусом трения.
Если материальная точка должна остаРис. 9
ваться на негладкой поверхности при действии
заданной силы Р, то для равновесия точки необходимо и достаточно, чтобы вектор Р проходил внутри конуса трения или, в
крайнем случае, – по его образующей.
2.2
Общие уравнения равновесия и движения твердого тела
Условия равновесия твердого тела являются следствием двух фундаментальных законов: сохранения импульса P и момента импульса L механической
системы.
Импульсом i-й частицы pi, называется векторная величина, равная произведению массы частицы на ее скорость vi:
p i = mi v i .
(17)
Моментом импульса li относительно некоторой точки О называется векторное произведение радиуса-вектора частицы ri на ее импульс pi, т. е.
l i = ri × pi .
(18)
Векторные суммы этих величин для всех частиц, составляющих некоторую систему, называются импульсом и моментом импульса системы
P = ∑ pi ;
L = ∑ li .
(19)
i
i
Из основ механики следует, что скорость изменения импульса всегда равна сумме всех внешних сил, действующих на систему,
13
dP
(20)
= ∑ Fi .
dt
i
Аналогично скорость изменения момента импульса задается суммой моментов
этих сил:
dL
(21)
= ∑ Mi .
dt
i
Пусть правые части уравнений (20), (21) равны нулю, тогда импульс и
момент импульса сохраняются во времени и, если в начальный момент система
находилась в покое, то всегда будут выполняться равенства:
P = 0; L = 0.
(22)
Твердое тело имеет шесть степеней свободы: три трансляционных и три
вращательных. Поэтому два трехмерных векторных уравнения (22) полностью
определяют его состояние как неподвижное.
Итак, необходимым и достаточным условием равновесия твердого тела
является равенство нулю суммы сил и суммы моментов сил, действующих на
тело:
(23)
∑ Fi = 0 ; ∑ Mi = 0 .
i
i
Заметим, что в случае нулевой суммарной силы сумма моментов сил не
зависит от выбора точки отсчета. Первое уравнение (23) обеспечивает неподвижность центра масс, а второе запрещает вращения тела.
Подробному анализу и применению равенств (23) к различным системам
посвящена оставшаяся часть пособия.
Заметим, что механическое состояние (движение) твердого тела задается
уравнениями (21), (22). Из них видно, что состояние определяется не отдельными силами Fi, а их суммой
F = ∑ Fi
(24)
i
и суммой моментов сил
M = ∑ Mi .
(25)
i
Вектор F называют главным вектором, а вектор M – главным моментом
системы.
Как следует из равенств (24), (25), существует много разных систем сил,
обладающих одинаковыми векторами F и М. Все они называются эквивалентными, так как обеспечивают одно и то же состояние твердого тела. Естественно
стремление заменить реальную систему сил наиболее простой эквивалентной
системой. Очевидно, что простейшей системой будет одно сила, равная F, и одна пара сил, обладающая моментом сил М. Используя зависимость момента от
выбора точки отсчета, можно провести дальнейшее приведение системы сил
(см. раздел 2.6).
14
2.3
Сходящиеся силы
Система внешних сил P1 , P2 ,..., Pn , приложенных в разных точках к одному и тому же твердому телу, называется сходящейся, если линии действия этих
сил пересекаются в одной точке С, называемой точкой схода или центром сил
(рис. 10). Совершенно очевидно, что моменты сил относительно точки схода
равны нулю. Сходящаяся система эквивалентна одной силе RC, вектор которой
n
равен сумме векторов всех сил системы R C = ∑ Pk , а линия действия проходит
k =1
через точку схода. В частности, при RC = 0 сходящаяся система эквивалентна
нулю, т. е. уравновешена.
Геометрическим признаком уравновешенности сходящейся системы служит замкнутость силового многоугольника, составленного из векторов этих
сил, а аналитически условия уравновешенности выражаются равенством нулю
сумм проекций данных сил на три не лежащие в одной плоскости оси:
n
∑ Pkx = 0 ;
k =1
n
∑ Pky = 0 ;
k =1
n
∑P
kz
k =1
= 0 , т. е. теми же уравне-
ниями (9), что и условия уравновешенности сил на точке.
Если система P1 , P2 ,..., Pn сходящихся в центре С
сил уравновешивается одной силой Q, то линия действия этой силы проходит через точку схода С данной
Рис. 10
n
системы и вектор Q = − ∑ Pk . В частности, если две пеk =1
ресекающиеся силы уравновешиваются третьей, то все три силы лежат в одной
плоскости и образуют сходящуюся систему.
Теорема о трех непараллельных силах. Если твердое тело находится в
равновесии под действием трех непараллельных сил, лежащих в одной плоскости, то линии действия этих сил пересекаются в одной точке (рис. 10).
Задача 5. Трехшарнирная арка (рис. 11, а), состоящая из двух частей, соединенных шарниром С, укреплена
O
a
б
на двух неподвижных шарнирах А и
В и находится под действием нагрузD
C
ки РD, вектор которой лежит в одной
Q
плоскости с шарнирами A, В, С. Найти реакции SA и QB шарниров А и В.
S
P
P
S
Решение. Так как ненагруженQ
ная половина арки находится под
действием только двух реакций в
A
B
точках В и С, то QB || ВС. Поскольку
Рис. 11
силы РD и QB сходятся в точке О, то
15
SA || АО. Векторы SA и QB находятся из силового треугольника РSQ (рис. 11, б).
Задача 6. Два здания – высокое и низкое – находятся на расстоянии а
друг от друга. Балку АВ вставили между стенами зданий так, что она концом А
упирается в гладкую стену более высокого здания, а промежуточной точкой D
оперта на край стенки более низкого здания (рис. 12 а). Длина балки равна 2l,
вес балки Р. Какой угол с вертикалью составляет балка в равновесии? Определить также реакции зданий.
в в
Рис. 12
Решение. Рассмотрим равновесие балки АВ. На балку действует одна активная сила, равная весу балки, приложенная в точке C посредине балки. На
балку наложено две связи, осуществляемые стенкой высокого здания и краем D
стенки второго здания. Отбросим мысленно обе связи и заменим их действие
реакциями. В точке А балка па условию опирается на гладкую стену, поэтому
реакция NA перпендикулярна стене. Направим реакцию NA вправо, так как стена
является односторонней связью и удерживает балку только от перемещения
влево. В промежуточной точке D опорой для балки является край стены, т. е.
прямой угол. Реакцию ND следует направить перпендикулярно к балке АВ, поскольку угловая опора не препятствует перемещению балки в направлении АВ.
Расчетная схема балки, находящейся в равновесии, показана на
рис. 12, б. На объект равновесия действуют три силы. Следовательно, можно
воспользоваться теоремой о трех силах. Линии их действия должны пересекаться в одной точке, а сами силы должны образовывать замкнутый треугольник. Заметим, что направления силы тяжести Р и реакции вертикальной стенки NA не зависят от того, под каким углом установлена балка. Сила тяжести
направлена по вертикали, реакция NA – по горизонтали, стало быть, эти две
стороны силового треугольника составляют прямой угол. Силовой треугольник – прямоугольный, сила Р и реакция NA образуют его катеты, а реакция ND
является гипотенузой. Из расчетной схемы видно, что реакция NА составляет с
вертикалью угол, равный (90о – α). В силовом треугольнике (рис. 12, в) ND составляет такой же угол с вертикальной стороной, т. е. с вектором Р. На расчетной схеме нетрудно найти треугольник, подобный силовому треугольнику.
Стороны треугольника DEO параллельны сторонам силового треугольника,
16
следовательно, треугольники подобны.
Из прямоугольного треугольника АСО (рис. 12, б) находим
AO = AC sin α = l sin α . Далее из прямоугольного треугольника АОD имеем
AD = AO sin α = l sin 2 α и, наконец, из прямоугольного треугольника ADE получаем AE = AD sin α = l sin 3 α . Но АЕ = а по условию, следовательно, a = l sin 3 α ,
откуда sin α = 3 a / l .
Переходим к определению реакций NA и ND. Из силового треугольника
находим
N D = P / sin α = P 3 l / a .
Далее получаем
2
⎛ l ⎞ ⎡ ⎛ l ⎞ 3⎤
N A = N D cos α = P ⎜ ⎟ ⎢1 − ⎜ ⎟ ⎥
⎝ a ⎠ ⎢⎣ ⎝ a ⎠ ⎥⎦
1
2.4
3
1
2
1
⎡⎛ l ⎞ 2 3 ⎤ 2
= ⎢⎜ ⎟ − 1⎥ .
⎢⎣⎝ a ⎠
⎥⎦
Пары сил
Парой сил называется система двух внешних сил, величины которых равны между собой, линии действия параллельны, а направления противоположны. Расстояние между линиями действия сил пары называется ее плечом.
Произведение величины силы пары на ее плечо называется величиной
момента пары. Пара, образованная силами, величина которых Р и которые
приложены в точках А и В, обозначается (РА, –РВ). Если плечо равно d, то момент имеет величину Рd. Сумма векторов моментов сил пары около любого
центра одна и та же и выражается формулой
MO ( PA ) + MO ( −PB ) = BA × P = M B ( PA ) .
M(PA,–PB)
Свободный вектор (рис. 13), равный сумме
векторов моментов сил пары около любого
P
центра, называется вектором момента пары и обозначается M( PA , −PB ) , так что
B
M( PA , − PB ) = BA × P .
(26)
A
Вектор момента пары имеет модуль,
M( PA , − PB ) = Pd , и направлен перпенди–P
кулярно к плоскости пары в сторону двиРис. 13
жения правого винта.
При наблюдении плоскости пары с произвольно выбранной стороны моменту пары приписывается положительный или отрицательный знак в
зависимости от того, как при этом пара вращает свое плечо: если против хода
часовой стрелки, то положительный, а если по ходу – то отрицательный. Вектор
момента пары служит механической мерой воздействия этой пары на тело, к
которому она приложена.
17
Две пары, имеющие один и тот же вектор момента, эквивалентны друг
другу, и наоборот, если две пары эквивалентны друг другу, то векторы их моментов математически равны между собой. В частности, если две пары лежат
на одной плоскости, то для их эквивалентности необходимо и достаточно равенство алгебраических величин их моментов. Всякая система пар, приложенных к одному телу, эквивалентна одной паре, вектор момента которой равен
сумме векторов моментов данных пар. В частности, плоская система пар эквивалентна одной паре на той же плоскости и алгебраическая величина ее момента равна сумме алгебраических величин моментов данных пар. Необходимым и
достаточным условием уравновешенности
системы пар является равенство нулю суммы
P
C
векторов их моментов. В частности, плоская
система пар уравновешена тогда и только тогда, когда сумма алгебраических величин их
h
моментов равна нулю. Пара не может ни быть
–P
эквивалентна одной силе, ни уравновешиQ
ваться одной силой. При помощи пары силу
РА можно перенести, не меняя ее вектора Р, из
A
S
B
точки А в любую точку В, добавляя пару
Рис. 14
(–РА, РВ).
Задача 7. Трехшарнирная арка, укрепленная на шарнирах А и В, находится под действием пары (Р, – Р), приложенной к одной половине в плоскости шарниров А, В, С. Найти реакции шарниров
S и Q (рис. 14).
Решение. Поскольку правая полуарка не нагружена, то сила реакции
Q || ВС. Так как реакции S и Q должны образовывать пару, уравновешивающую
данную нагрузку, то S = – Q и М(Q,S) = – М (P, –P). Отсюда находим: S = Q = M ( P, − P) / h , где h – расстояние шарнира А до прямой ВС.
2.5
Уравнения равновесия тела
Если тело при действии на него системы ( P1 , P2 ,..., Pn ) внешних сил находится в равновесии, то эта система должна быть уравновешенной, т. е. должна
удовлетворять равенствам (23). В проекциях на оси xyz эти условия дают шесть
уравнений равновесия:
n
∑ Pkx = 0;
k =1
n
∑M
k =1
n
∑M
k =1
Ox
n
∑ Pky = 0;
k =1
n
∑P
k =1
kz
= 0;
(Pk ) =∑ ( yk Pkz − zk Pky ) = 0 ;
(27)
k =1
n
Oy
n
n
(Pk ) =∑ ( zk Pkx − xk Pkz ) = 0 ;
∑M
k =1
k =1
n
Oz
(Pk ) =∑ ( xk Pky − yk Pkz ) = 0 ,
k =1
т. е. при равновесии твердого тела под действием системы внешних сил сумма
18
проекций всех приложенных к нему сил на каждую координатную ось и сумма
их моментов около каждой координатной оси равны нулю. В эти уравнения в
случае несвободного тела входят как заданные силы, так и возникшие реакции
связей. Те из уравнений (27), которые не содержат реакций связей, называются
условиями равновесия несвободного тела.
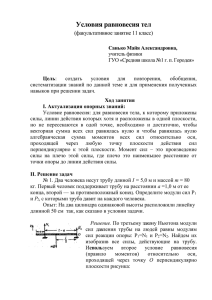
Задача 8. Однородный стержень АВ весом Р, образующий с полом угол
45°, упирается концом А в негладкий плинтус комнаты (рис. 15, а), а концом В
в гладкую вертикальную стену. В точке В к стержню прикреплен горизонтальный трос ВЕ. Проверить, может ли стержень оставаться в равновесии, а также
определить реакции плинтуса, стены и троса, если коэффициент трения скольжения о плинтус f = 0.5, а угол OAD = 30°. Оси х, у, z изображены на рисунке.
б)
Рис. 15
Решение. Стержень не мог бы оставаться в равновесии, если бы плинтус
был гладким. В этом случае конец стержня А начал бы скользить вдоль плинтуса. Равновесие возможно лишь при наличии силы трения Fтр, направленной
противоположно возможному движению, т. е. от А к О, причем модуль силы
трения должен, быть меньше или равен его наибольшему значению
Fтр ≤ fRA,
(1*)
где f – коэффициент трения скольжения; RA - модуль нормальной реакции
плинтуса. В случае невыполнения этого условия стержень придет в движение.
К стержню приложена одна активная сила – его сила тяжести Р
(рис. 15, б). Так как по условию стена является гладкой, то ее реакция RB перпендикулярна к плоскости стены, т. е. параллельна оси х. Реакция Т троса направлена от В к Е. О направлении силы трения Fтp было сказано выше. Нормальная реакция RA плинтуса расположена в плоскости yz, но направление ее
пока неизвестно. Поэтому разложим силу RA на взаимно перпендикулярные составляющие RAy и RAz, т. е.
RA = RAy + RAz.
(2*)
Задача является cтатически определенной, ибо число неизвестных равно
пяти: RB, Т, Fтр, RAy и RAz. Обозначив длину стержня через 2l, составим пять
19
уравнений равновесия:
RB – Fтр = 0;
RAy – T = 0.
RAz – Р = 0,
(3*)
(4*)
(5*)
ΣM (F ) = – Р l cos 45° sin 30°+ Т 21 sin 45 = 0;
ΣM (F ) = –Р l cos 45° cos 30° + R 2l sin 45 = 0.
х
o
k
(6*)
o
(7*)
Решая систему уравнений (3*)–(7*), найдем RAz из (5*), Т из (6*), RВ из
(7*); затем получим Fтp из (3*) и RАy из (4*). Итак, искомые силы по модулю определяются выражениями:
RAz = Р; RAy = Т= 0,25Р; RВ = Fтр = Р √3/4 = 0,43P.
(8*)
Остается проверить, может ли стержень оставаться в равновесии. По теоу
В
k
реме Пифагора RA = RAy 2 + RAz 2 = 1.04 P . Подставив в (1*) значения Fтр и RА
при f = 0,5, получим верное неравенство 0,43Р < 0,52Р.
Так как условие (1*) выполнено, стержень находится в равновесии. Если
бы коэффициент трения скольжения был меньше, чем 0,41, то стержень не мог
бы остаться в равновесии и начал бы двигаться.
Замечание. Мы не использовали в задаче шестое уравнение равновесия
ΣM (F ) = T AD cos 30° – R
AD sin 30o = 0. Данное уравнение выполняется автоматически, в чем легко убедиться, подставляя в него найденные выше значения сил.
z
z
В
k
Задача 9. Дверь весом Р, вращающаяся
около вертикальной оси АВ, закрепленная снизу подпятником А и сверху подшипником В,
удерживается в покое силой QD, приложенной
перпендикулярно к плоскости двери в точке D,
и горизонтальной неизвестной силой ТC, приложенной в точке С и составляющей со стороной АС угол α = 45°. Определить величину силы Т и реакции SA и RB (рис. 16).
Решение. Принимая АВ за ось z, и АС за
ось у, составляем таблицу проекций и моментов сил:
P
Q
T
SA
RB
x
0
–Q
2T / 2
Sx
Rx
y
0
0
− 2T / 2
Sy
Ry
z
–P
0
0
Sz
0
20
MOx
−bP / 2
0
0
0
–aRy
B
b
a
Q
D
P
A
α
x
T
C
y
Рис. 16
MOx
0
–aQ
0
0
aRx
MOx
0
bQ
−b 2T / 2
0
0
Отсюда находим шесть уравнений равновесия:
S x + Rx − Q + T
− aR y −
2
2
= 0 ; S y + Ry − T
= 0 ; P − Sz = 0 ;
2
2
bP
2
= 0 ; –aQ +aRx = 0; bQ − b
= 0.
2
2
Решение их дает величину сил:
T = Q 2 ; Rx = Q ; R y =
S x = −T
bP
;
2a
2
bP
; Sz = P .
; Sy = Q +
2
2a
Задача 10. Две однородные тонкие плиты сварены под прямым углом
друг к другу и закреплены двумя подшипниками в точках А и В и двумя невесомыми стержнями (рис 17). Стержни прикреплены к плитам и неподвижным
опорам шарнирами. Размеры указаны на рисунке, величина а = 0.6 м. Вес
большой плиты P1 = 5 кН, вес маz
лой плиты P2 = 3 кН.
3a
B’
На плиты действует пара сил
с моментом М = 4 кН·м, лежащая в
2a
P2
плоскости вертикальной плиты и
две силы – F1 = 8 кН и F2 = 12 кН.
С’
Сила F1 приложена в углу верхней
M
плиты и направлена параллельно
F2
оси х. Сила F2 приложена к середине ее стороны и лежит в плосF1
кости ху под углом 30о от оси x по
4a
часовой стрелке..
P1
Определить реакции связей
A
B
в точках А и В и реакции стержy
ней.
Решение. Рассмотрим равновесие плит. На них действуют
C
заданные силы: F1 = {F1 ,0,0} в
x
точке с координатами {2,3, 4}a ,
Рис.
Рис.1717 a.
сила F2 = {cos 30°, − sin 30°,0}F2 в
точке с координатами {2,1.5, 4}a ,
пара сил с моментом M = {M ,0,0} , силы тяжести P1 = {0,0, −P1} в точке
{0,1.5, 2}a и P2 = {0,0, −P2 } в точке {1,1.5, 4}a , а также неизвестные реакции связей.
21
Реакции подшипников в точках A = {0,0,0} и B = {0,3,0}a разложим на
хz-составляющие: XA, ZA, и XB, ZB. Реакцию ZC’ стержня, приложенную в точке
C ' = {2,0, 4}a , направим вертикально вверх, по оси z, а реакцию второго стержня YB’ в точке B ' = {0,3, 4}a – по оси у (рис. 17а). Всего имеется шесть неизвестных реакций. Для их определения напишем шесть уравнений равновесия твердого тела.
Проекции суммы сил на три
оси координат:
z
3a
F1 + F2 cos 30° + X A + X B = 0 ; (1*)
− F2 sin 30° + YB ' = 0 ;
2a
(2*)
4a
(4*)
−2 F2 sin 30° − 3 X B )a = 0
.
F1
P1
A
B
y
(4 F1 + P2 + 4 F2 cos30° − 2 Z C ' )a = 0 ;
(5*)
(−3F1 − 1.5 F2 cos 30° −
M
F2
Приравнивая к нулю моменты сил
по осям х, у, z, получаем еще три
уравнения:
+4 F2 sin 30° − 3YB ' + 3Z B ) = 0
P2
С’
− P1 − P2 + Z A + Z B + Z C ' = 0 . (3*)
M + a (−1.5 P1 − 1.5 P2 +
B’
C
(6*)
x
Рис.17а
Рис. 17 б.
Из равенств (2*), (5*) и (6*) сразу
находим величины:
YB ' = 6 кН; Z C ' = 38.28 кН; X B = −17.20 кН.
Подстановка этих значений в равенства (1*), (4*), (3*) дает остальные силы:
X A = −1.19 кН;
Z B = −0.22 кН;
Z А = −30.06 кН.
Знак минус означает, что сила направлена вдоль отрицательного направления
оси.
Равновесие тела с закрепленными точками. Для тела с одной закрепленной
точкой О условиями равновесия служат уравнения моментов:
n
∑M
k =1
Ox
(Fk ) =0 ,
n
∑M
k =1
Oy
(Fk ) =0 ,
n
∑M
k =1
Oz
(Fk ) =0 ,
(28)
где Fk заданные силы.
Для тела с двумя закрепленными точками О и О' (ось вращения) услови22
ем равновесия является уравнение
n
∑M
k =1
OO '
(Fk ) =0 ,
(29)
где Fk обозначают заданные силы.
Принимая прямую OO' за ось z, для определения реакций NO и No' закрепленных точек О и О' получаем уравнения:
n
∑ Fkx + N x + N x ' = 0 ;
k =1
n
∑M
k =1
Ox
n
∑ Fky + N y + N y ' = 0 ;
k =1
(Fk ) − hN y ' = 0 ;
n
∑M
k =1
Oy
n
∑F
k =1
kz
+ Nz + Nz ' = 0 ;
(Fk ) + hN x ' = 0 ,
(30)
где h = OO'. Эти уравнения определяют поперечные к оси OO' компоненты Nx,
Ny, Nx', Ny' и сумму Nz + Nz' продольных компонентов реакций.
2.6
Равнодействующая система сил. Приведение к данному
центру
Равнодействующая (эквивалентная) система сил определяются из следующего условия. Если из совокупности всех активных сил, действующих на
твердое тело, вычесть некие вспомогательные силы, то тело будет находиться в
равновесии. Следовательно, равнодействующая сила F, называемая главным
вектором системы сил, и равнодействующий момент M0 (относительно центра
r0), называемый главным моментом системы сил, находятся из двух векторных
уравнений:
n
F = ∑ Fk ;
(31)
k =1
n
M 0 = ∑ (rk − r0 ) × Fk .
(32)
k =1
Величина равнодействующего момента зависит от выбора центра r0, который можно рассматривать как точку приложения равнодействующей силы F.
Используя равенство (31), запишем уравнение (32) в виде:
M 0 = M − r0 × F .
(33)
Здесь M – момент активных сил относительно начала координат, вычисляющийся по формуле:
n
M = ∑ rk × Fk .
(34)
k =1
Если равнодействующая F = 0, то из соотношения (33) следует, что
M 0 = M и, значит, величина результирующего момента не зависит от выбора
центра r0.
Пусть F ≠ 0 , тогда, перемещая точку r0, можно изменять величину момента M0 согласно равенству (33). Естественно стремление выбрать момент в
23
наиболее простом виде, желательно нулем. Последнее, однако, не всегда возможно, потому что векторное произведение r0 × F направлено перпендикулярно
силе F, значит, преобразование (33) сохраняет неизменной составляющую момента вдоль силы (инвариант приведения):
M 0 = M = ( M ⋅ F ) / F .
(35)
Можно обнулить только перпендикулярную составляющую M 0⊥ = 0 ,
подбирая величину r0 из условия
0 = M ⊥ − r0 × F .
(36)
Решение уравнения (36) дает явную формулу для центральной оси, которая направлена вдоль вектора F (k – произвольная величина размерности м/Н):
r0 = F × M / F 2 + kF ,
(37)
при этом
(38)
M 0 = M = F (M ⋅ F ) / F 2 .
Заметим, что прямая (37) проходит параллельно силе F на расстоянии
r0 = M ⊥ / F = M sin( F ∧ M ) / F от центра момента М.
Уравнения (31), (34), (37), (38) решают задачу приведения системы сил в
самом общем виде. Равнодействующая система представляет собой силу (31),
приложенную в любой точке оси (37), и пару с моментом (38), направленным
вдоль этой оси. Такая система носит название динамический винт или динама.
Плоская система сил (в ней M ⊥ F ) всегда может быть заменена одной
равнодействующей силой, приложенной в точке с координатами r0 = F × M / F 2 .
Результаты приведения системы можно расположить в таблицу.
F ≠ 0;
F ≠ 0;
F = 0;
F = 0;
M ≠ 0; ( FM ) ≠ 0
M ≠ 0; ( FM ) = 0
M≠0
M=0
Динама, или две скрещивающиеся силы
Равнодействующая сила
Одна пара
Уравновешенная система
Задача 11. По ребрам прямоугольного параллелепипеда приложены силы
F1, F2 и F3. Модуль силы F2 вдвое больше модуля силы F1, а модуль силы F3 в
три раза больше модуля силы F1 (рис. 18). Какое соотношение должно существовать между сторонами параллелепипеда, чтобы заданная система сил могла
быть приведена к равнодействующей?
Решение. Найдем проекции главного вектора и главного момента системы
сил на оси координат, которые направляем вдоль ребер параллелепипеда из
вершины O так, как показано на рисунке:
Vx = −3F ; Vy = − F ; Vz = −2 F ;
M x = −2 Fb ; M y = −3Fc + 2 Fa ; M z = 0 .
Видим, что и главный вектор и главный момент не равны нулю. В этом
случае систему сил можно привести к равнодействующей, если главный вектор
и главный момент взаимно перпендикулярны. Условие перпендикулярности
24
главного вектора и главного момента – равенство нулю их скалярного произвеVx M x + Vy M y + Vz M z = 0 .
После
подстановки
имеем:
дения:
−3F (−2 Fb) − F (−3Fc + 2 Fa ) = 0 , откуда следует равенство 6b + 3c − 2a = 0 , или
(*)
a = 1.5c + 3b .
Если размеры параллелепипеда удовлетворяют полученной зависимости,
то система приводится к равнодействующей силе V = {−3, −1, −2}F .
Найдем точку (на самом деле ось) приложения этой силы по формуле (37):
V×M
r0 =
+ lV ,
V2
где М – суммарный момент сил, а l – любое число. С учетом (*) момент равен M = {−2,6,0}Fb .
Вычисления дают координаты оси
i
j k
b
b
r0 = −3 −1 −2 2 2
= {12,4, −20} − l{3,1, 2}b
2
3 +1 + 2
14
−2 6 0
.
Расстояние от начала координат до оси равно
M
40
r
l
=
=
=
b.
(
0)
0
Рис. 18
V
14
3. РАВНОВЕСИЕ СИСТЕМЫ ТЕЛ
3.1. Реакции соединений твердых тел
Твердое тело называется свободным, если его движение ничем не ограничено. B большей части технических задач встречаются лишь несвободные твердые тела.
Несвободным называется такое твердое тело, на которое наложены связи,
ограничивающие его движение в некоторых направлениях. Так, для лампы,
подвешенной на шнуре, связью является шнур; для книги, лежащей на столе,
связью является стол; для лестницы, приставленной к стене, связями являются
пол и стена. Для шара, катящегося по бильярдному столу, связью является поверхность стола и его борт.
Сила, с которой связь действует на твердое тело, называется реакцией
связи. Если считать силу, с которой твердое тело действует на связь, действием,
то реакция связи является противодействием. При этом сила–действие приложена к связи, а реакция связи приложена к твердому телу.
Все силы, действующие на твердое тело, можно разделить на две группы:
силы активные и реакции связей. Активные силы не зависят от связей, а значит,
и от реакций связей, наложенных на твердое тело. Вместе с тем реакции связей
зависят от активных сил.
25
Закон освобождаемости от связей. Несвободное твердое тело можно рассматривать как свободное, если его мысленно освободить от связей, заменив
действие связей соответствующими реакциями связей.
Этот закон дает возможность, в частности, применить к несвободному твердому телу условия равновесия,
справедливые для свободного твердого тела. При этом
следует, отбросив связи, наложенные на твердое тело,
заменить их соответствующими реакциями связей. Затем
надлежит рассмотреть равновесие этого несвободного
твердого тела, как тела свободного, под действием акРис. 19
тивных сил и реакций связей.
B большинстве задач на равновесие твердого тела
следует, если возможно, сразу указать направление реакций связей, а затем определить их модули, в ходе решения задач.
1. Если твердое тело опирается на идеально гладкую (без трения) поверхность, то реакция поверхности направлена по нормали к ней в точке соприкосновения, т. е. перпендикулярно касательной плоскости в данной точке поверхности (рис. 4). Такая реакция называется нормальной реакцией.
2. Если твердое тело в точках A и B (рис. 19)
опирается на ребра двугранных углов, а в точке C – на
гладкую плоскость, то для направления реакций связи
в точках A и B следует применить метод обращения,
т. е. представить, что двугранный угол опирается на
твердое тело, являющееся для него связью. В результате получим, что реакция связи направлена нормально к поверхности тела. Реакция RС, в соответствии со
случаем 1, направляется перпендикулярно к горизонРис. 20
тальной плоскости.
3. Если твердое тело упирается острием в угол
(например, лестница в выступ пола), то подобную связь следует рассматривать
как двойную: угол A (рис. 20) препятствует перемещению твердого тела по горизонтали налево и по вертикали вниз. Поэтому две составляющие опорной реакции R1A и R2A следует направить противоположно этим перемещениям: первую – направо, вторую – вверх.
4. Цилиндрическим шарниром называется совокупность неподвижного валика A и надетой на него втулки
В, соединенной с твердым телом D (рис. 21). При этом
твердое тело может поворачиваться вокруг оси валика.
В точке соприкосновения С втулки с валиком возникает
опорная реакция, направленная по нормали к идеально
гладким поверхностям соприкасающихся тел в точке касания. Так как положение точки С соприкосновения ваРис. 21
лика А с втулкой В заранее неизвестно, то невозможно
26
сразу указать направление реакции R. При решении задач реакция R заменяется
двумя взаимно перпендикулярными составляющими R1 и R2. Определив в ходе
решения задачи R1 и R2, находят модуль и направление реакции R. Нетрудно
видеть, что реакцию можно разложить на составляющие по любым двум направлениям, например на R1 и R2 или на R3 и R4 (рис. 22)
и т. д. Обычно, пренебрегая диаметром валика по сравнению другими размерами, составляющие R1 и R2 прилагают в центре О.
5. В случае сферического шарнира (рис. 23) также
нельзя заранее указать положение точки соприкосновения и, следовательно, направление реакции R. При решении задач реакция R сферического шарнира заменяетРис. 22
ся тремя взаимно перпендикулярными составляющими
R1, R2 и R3 (рис. 24).
6. Если на твердое тело наложена гибкая связь (нить, канат, трос, цепь и
др.), то реакция приложена к твердому телу в точке его прикрепления к гибкой
связи. Реакция гибкой связи направлена по связи, если она
прямолинейна, или по касательной к связи в точке ее наложения (рис. 25).
7. Если абсолютно жесткий невесомый прямолинейный
стержень, концы которого соединены шарнирами с другими
Рис. 23
Рис. 24
частями конструкции, находится в равновесии под действием
сил, приложенных к его концам, то следует реакции направить вдоль стержня.
Действительно, если к стержню со стороны других частей конструкции
приложены силы в каждом из его концов, т. е. в шарнирах, то после сложения
сил оказывается, что в каждом из шарниров приложено
по одной силе. В результате стержень находится в равновесии под действием двух сил, приложенных в шарнирах.
Эти силы по модулю равны и направлены в противоположные стороны по общей линии действия, т. е. вдоль
стержня. При этом стержень подвергается действию расРис. 25
тягивающих F либо сжимающих сил –F. Если стержень
подвержен растяжению, то реакции стержня, приложенные к шарнирам, на основании закона равенства действия и противодействия
направлены вдоль стержня друг к другу. Если стержень подвержен сжатию, то
реакции стержня направлены вдоль стержня друг от друга.
Решение задач на равновесие твердого тела, независимо от взаимного
расположения приложенных к телу сил, рекомендуется проводить в следующем
порядке: 1) выделить твердое тело, равновесие которого надо рассмотреть для
27
отыскания неизвестных величин; 2) изобразить активные силы; 3) если твердое
тело несвободно, то, применив закон освобождаемости от связей, приложить к
нему соответствующие реакции связей; 4) рассмотреть равновесие данного несвободного твердого тела, как тела свободного, находящегося под действием
активных сил и реакций связей; 5) использовать необходимые и достаточные
условия (уравнения) равновесия в соответствии со взаимным расположением
сил, приложенных к твердому телу, и определить искомые величины.
3.2. Плоская система сил
Если все внешние силы, приложенные к твердому телу, находятся в одной плоскости, то такая система сил называется плоской. Ее главный вектор F
лежит в той же плоскости, а главный момент МO в точке О этой плоскости и к
ней перпендикулярен. Поэтому плоская система сил приводиться к динаме не
может, а эквивалентна одной равнодействующей F, если F ≠ 0 , или паре, если
F = 0 и M O ≠ 0 , или, наконец, уравновешена при F = 0 и M O = 0 .
Если плоскость сил принять за плоскость ху, то условия уравновешенности (27) для плоской системы сводятся к трем уравнениям:
n
∑ Pkx = 0;
k =1
n
∑ Pky = 0;
k =1
n
∑M
k =1
O
(Pk ) = 0 . (39)
Задача 12. Трехшарнирная арка, укрепленная на шарнирах А и В, находится
под действием нагрузок, приложенных к
разным частям арки (рис. 26). Найти реакции SA и QB в шарнирах А и В.
Решение. Уравнения равновесия арки
как одного тела будут:
P1 x + P2 x + S x + Qx = 0 ;
P1 y + P2 y + S y + Q y = 0 ;
у
C
P1
A
h
a1
P2
a2
B
x
Рис. 26
M A ( P1 ) + M A ( P2 ) + ( a1 + a2 )Q y = 0 .
В них четыре неизвестных. Четвертое уравнение (в форме равновесия
моментов сил относительно точки С) дает условие равновесия левой половины
арки:
M C ( P1 ) − a1S y + hS x = 0 .
Задача 13 . Однородная балка АВ длиной l = 4 м и весом Р = 400 Н упирается концом А в выступ пола, а точкой D на ребро ступени (рис. 27, а). Балка
образует угол 30о с горизонтом. Расстояние АМ = 2 м. Определить силы опорных реакций в точках A и D.
Решение. Рассмотрим равновесие балки АВ. Единственной задаваемой
силой является вес балки Р, приложенный в середине балки С (рис. 27, б). Сила
опорной реакции RD направлена перпендикулярно балке АВ. Заранее указать
направление силы реакции в точке А нельзя, поэтому изобразим в точке А две
28
взаимно перпендикулярные составляющие силы.
Ось х направим по горизонтали направо, ось у – по вертикали вверх. Составляющие
силы опорной реакции RAx и RAy
в точке А направим в сторону
положительных
направлений
этих осей.
Задача является статически определенной, так как число
неизвестных (RAx, RAy, RD) равно
трем. Составим систему уравнений равновесия сил и моментов (39). В данной задаче эта
система уравнений имеет вид:
RAx – RD sin 30°= 0;
RAy –P + RD cos 30°= 0;
RD·AD –P·AN=0.
Поскольку AD = AM/cos 30°,
Рис. 27
то из последнего уравнения находим силу RD = 2 P cos 30° /(2 / cos30°) = 3P / 4 = 300 Н. Подставив значение RD
в уравнения для сил, получим RAx = 150 Н, RAy = 140 Н.
Все результаты оказались положительными. Это значит, что направления
сил реакций связей были указаны на рисунке верно.
Задача 14. Цилиндрический стакан радиусом R поставлен открытой стороной на гладкий горизонтальный пол. Внутри стакана находятся два одинаковых шара радиусом r и весом Р каждый (рис. 28, а). Определить вес Q цилиндрического стакана, при котором шары не опрокинут его. Стенки стакана абсолютно гладкие.
Рис. 28
Решение. Для определения искомого веса стакана рассмотрим отдельно
равновесие двух шаров (рис, 28, б) и равновесие стакана (рис. 28, в). На систему
двух шаров действуют силы: вес каждого шара Р, приложенный в центре шара
29
и направленный по вертикали вниз; реакция гладкого пола Т, направленная по
вертикали вверх; реакции стенок стакана N1 и N2, направленные по горизонтали
и приложенные в точках D и С.
Проведем оси координат: ось х горизонтально, ось у вертикально. Уравнения равновесия для системы, состоящей из двух шаров, имеют вид
∑ Fkx = N1 − N 2 = 0 ;
∑M
∑F
ky
O
= T − 2P = 0 ;
( Fk ) = N 2 ⋅ AB − P ⋅ OB = 0 .
Третье уравнение – уравнение моментов – составлено относительно точки О,
где пересекаются линии действия трех сил, в том числе двух неизвестных. Из
первого уравнения следует: N1 = N2 = N.
P ⋅ OB
Из третьего уравнения находим N 2 =
.
AB
Рассмотрим далее равновесие цилиндрического стакана (см. рис. 28, в).
На стакан действуют силы: вес Q по вертикали вниз, реакции шаров N'1 и N'2,
приложенные в точках D и С, реакции пола в точках Н и К. (Ясно, что N1' = N1 и
N2' = N2.) В момент опрокидывания стакана, который мы рассматриваем, давление в точке Н на пол и, следовательно, реакция пола обращаются в нуль и стакан опирается на горизонтальную плоскость только в точке К.
Составим уравнение моментов относительно точки К:
∑ M K ( Fk ) = N 2 '⋅ CK − N1 '⋅ DH − QR = 0 .
Далее имеем N АВ – Q R = 0. Подставляя в это равенство значение N, получаем
AB
OB ⋅ AB
OB
=P
=P
,
Q=N
R
R ⋅ AB
R
но ОВ = 2R – 2r, и, следовательно, для равновесия необходимо, чтобы выполнялось неравенство
Q ≥ 2 P(1 − r / R) .
Если вес стакана больше суммарного веса шаров, то они никогда не выберутся из-под него, даже если будут изменять свои размеры.
Задача 15. Механическая система, состоящая из трех сочлененных тел
(рис. 29, а), нагружена сосредоточенной силой Р = 6 кН, распределенной нагрузкой интенсивности q = 3 кН/м и парой сил с моментом М = 18 кН. Определить реакции внешних и внутренних связей.
Решение. Заметим, что наша система закреплена в одной точке А жеской
заделкой, которая создает три реакции: горизонтальную XА и вертикальную YА
силы, а также момент сил МА (рис 29, б). Удобно записать уравнения для
системы как для единого тела, при этом в уравнения равновесия входят только
активные внешние силы, а внутренние силы совершенно несущественны:
∑ X k = X A − P cos 60° = 0 ;
∑Y
k
= YA − P sin 60° − Q = 0 ;
30
∑M
= M A − M − 4Q − 4 P sin 60° − 3P cos 60° = 0 .
Здесь мы заменили распределенную нагрузку суммарной силой Q = 6q =
= 18 кН, приложенной в центре тяжести эпюры, кроме того, использовали
k
q
Q
B
C
45o
YA
C
3
3
XA
A
P
3
E
3
60o
M
D
3
MA
A
P
60o
M
1
B
E
3
1
D
3
3
б
Рис.. 29 а.
.
разложение наклонной силы Р на горизонтальную и вертикальную компоненты
(рис 29, б). Подставляя известные значения внешних сил, находим реакции
жесткой заделки А:
X A = 3 кН; YA = 23.20 кН; M A = 119.78 кН·м.
(1*)
Рассмотрим равновесие балки ВС. На нее действует сила Q и три реакции
связей: одна сила величиной RB в точке В, направленная вдоль стержня, и две
компоненты силы XC и YC в точке С (рис. 30, а). Следующие три уравнения
вполне достаточны для нахождения этих сил:
∑ X k = − RB cos 45° + X C = 0 ;
∑Y
∑M
k
= RB sin 45° − Q + YC = 0 ;
Ck
Q
= −6 RB sin 45° + 3Q = 0 .
YE
YC
RB
P
M
45o
B
C
3
XC
60o
MD
E
3
D
3
Рис. 30 а
XD
3
б
В качестве центра моментов мы сознательно выбрали точку С, чтобы две
неизвестных силы не вошли в него. Начинаем распутывать систему с
31
последнего уравнения. Находим силу RB и, подставляя найденное значение, в
первые уравнения, приходим к результату:
RB = 12.73 кН; X C = 9 кН; YC = 9 кН.
(2*)
Рассмотрим теперь равновесие балки ED. На нее действует три реакции
связей: одна сила величиной YE в точке E, направленная вдоль стержня, горизонтальная сила XD и момент сил MD в точке D (рис. 30, б). Вертикальная сила в
этой точке отсутствует, так как данное соединение не препятствует вертикальному движению деталей. Вновь напишем три уравнения равновесия:
∑ X k = − P cos60° + X D = 0 ;
∑M
∑Y
k
= YE − P sin 60° = 0 ;
= − M − 3P sin 60° + M D = 0 .
Уравнения решаются независимо друг от друга, и вот результат:
Ek
X D = 3 кН; YE = 5.20 кН; M D = 33.59 кН·м.
(3*)
Равенства (1*)–(3*) дают решение поставленной задачи. Для полноты
картины заметим, что на среднее Т-образное тело в местах сочленения С и D, а
также в точках крепления стержней В′ и E′ на него действуют силы, равные по
величине, но противоположно направленные силам (2*), (3*), в том числе и
момент сил – MD.
3.3. Параллельные силы
Если все силы системы P1 , P2 ,..., Pn расположены на параллельных прямых, то, выбрав на этих прямых определенное направление, указываемое ортом
е, и обозначая через Pk алгебраическую величину силы на оси, получим для
главного вектора R системы и главного момента МO формулы:
R = e ∑ Pk , MO = ∑ Pk rk × e ,
k
k
где rk обозначают радиус-векторы точек приложения сил относительно центра О. Вектор
SO = ∑ Pk rk
(40)
k
называется вектором статического момента системы параллельных сил около
центра О, а его проекции на оси хуz — статическими моментами около соответствующих осей. Главный момент МO выражается через статический момент SO
формулой
M O = SO × e .
(41)
При перемещении центра О в центр С, причем ОС = rС, статический момент изменяется по формуле
SO = SC + rC R .
(42)
Рассмотрим случай R ≠ 0 . Поскольку MO ⊥ R , то существует центр С, в
32
котором статический момент равен нулю. Этот центр называется центром параллельной системы сил. Его положение относительно произвольного начала О
определяется радиусом-вектором
Pk rk
SO ∑
k
=
.
(43)
rC =
R
P
∑k
k
Положение центра системы параллельных сил зависит не от их направления, а только от их величин и точек приложения. Главный момент МС = 0, а потому система параллельных сил эквивалентна одной равнодействующей RC,
линия действия которой проходит через центр системы. В случае двух сил, направленных в одну сторону, центр делит отрезок, соединяющий их точки приложения, на части, обратно пропорциональные величинам сил, внутренним образом, а в случае сил, направленных в противоположные стороны, внешним.
Если R = 0, то статический и главный моменты не зависят от выбора центра и система эквивалентна паре (при МO ≠ 0) или уравновешена (при МO = 0).
Последнее условие выполняется при SO = 0, и тогда уравнения равновесия
имеют вид:
(44)
∑ Pk = 0 ; ∑ Pk rk = 0 .
k
k
Это равновесие не нарушается при изменении направления сил и называется астатическим.
3.4. Центр тяжести
В технических задачах силы, представляющие вес материальных частиц
твердого тела, можно считать параллельными. Центр этих параллельных сил
называется центром тяжести тела. Положение центра тяжести тела по отношению к этому телу не зависит от ориентации тела относительно Земли. Для определения центра тяжести сплошного тела, заполняющего объем V, этот объем
разбивают на бесконечно малые части ΔVk. Вес каждой части равен Pk = q(rk ) ΔVk , где q(r) – удельный вес тела в данной точке r.
Удельный вес в разных точках, в общем случае, имеет различное значение. Если он постоянен, то тело называется однородным. Полный вес Р тела
через заданный удельный вес q(х, у, z) выражается формулой
P = ∑ Pk = ∫ q(r )dV .
(45)
k
(V )
Общие формулы (43) для координат центра тяжести получают вид
1
rC = ∫ rq(r )dV .
P (V )
В случае однородного тела имеем
1
rC = ∫ rdV .
V (V )
33
(46)
(47)
Центр тяжести однородного тела является центром объема этого тела.
Если однородное тело имеет плоскость, ось или центр геометрической
симметрии, то его центр тяжести лежит на плоскости, на оси или в центре симметрии.
Для тела, образованного тонким поверхностным слоем, интеграл по объему заменяется интегралом по поверхности. Центр тяжести проволоки определяется линейным интегралом.
Если тело разбивается на части объема Vj с центрами тяжести в точках rj,
то центр тяжести всего тела дается средним:
∑j rjV j
rC =
.
(48)
∑V j
j
Если из сплошного тела объема VS, центр тяжести которого расположен в
точке rS, удалить части объема Vj' с центрами тяжести в точках rj, то центр тяжести полученного полого тела определяется равенством
rSVS − ∑ r jV j '
j
rC =
.
(49)
VS − ∑V j
j
Для центров тяжестей плоской кривой и плоской площадки имеют место
теоремы Паппа—Гюльдена.
1. Если плоскую кривую повернуть на некоторый угол вокруг какойнибудь оси, лежащей в плоскости кривой и ее не пересекающей, то площадь
поверхности вращения, описанной при этом повороте кривой, равна длине кривой, умноженной на длину пути ее центра тяжести.
2. Если замкнутую плоскую фигуру повернуть на некоторый угол вокруг
оси, лежащей с ней в одной плоскости, но не пересекающей ее контура, то объем тела вращения, описанного при этом повороте фигурой, равен ее площади,
умноженной на длину пути ее центра тяжести.
Центр тяжести линий
1.
Прямолинейный отрезок АВ
Средина С отрезка АС = СВ.
2.
Периметр треугольника
Центр С круга, вписанного в треугольник, вершина которого лежит на срединах сторон данного треугольника.
3.
Периметр правильной ломаной длины L, хорды d и
апофемы а.
С лежит на перпендикуляре, опущенном из центра О на
ad
хорду на расстоянии OC =
.
L
34
4.
Дуга окружности радиуса R с центральным углом
2α радиан.
С лежит на биссектрисе центрального угла на расстоянии
sin α
OC = R
от центра О дуги.
α
Для полуокружности OC =
2
R≈
π
5.
Арка циклоиды x = a (t − sin t );
4
xC = π a; yC = a .
3
6.
Четверть астроиды x 3 + y
координатном квадранте.
2
xC = yC = a
5
2
2
3
7
R
11
y = a (1 − cos t ) .
2
= a 3 , лежащая в первом
Центр тяжести поверхностей
7.
Площадь треугольника
Точка С пересечения медиан.
8.
Площадь трапеции
На прямой ММ, соединяющей средины
оснований АЕ = а, ВD = b, на расстоянии
ha от основания АЕ, где
1 a + 2b
,
ha = h
3 a+b
h — высота трапеции.
Центр С тяжести трапеции можно построить, отложив ВЕ' = а, ЕD’ = b и
взяв точку С пересечения прямых MN и E’D’.
9.
Параллелограмм
Точка пересечения диагоналей.
10. Круговой сектор радиуса R с центральным углом
2α радиан
На биссектрисе центрального угла на расстоянии
2 sin α
от центра О круга.
OC = R
α
3
35
Для полукруга OC =
4 R 14
≈ R.
3 π 33
11. Круговой сегмент радиуса R с центральным углом
2α радиан
На биссектрисе центрального угла на расстоянии
2
sin 3 α
OC = R
от центра О круга.
3 α − sin α cos α
x2 y 2
12. Площадь квадранта эллипса 2 + 2 = 1
a
b
4a
4b
xC =
.
; yC =
3π
3π
13. Площадь циклоиды x = a (t − sin t );
5
xC = π a; yC = a .
6
14. Площадь квадранта астроиды x
256 a
xC = yC =
.
315 π
2
y = a (1 − cos t )
3
+y
2
3
=a
2
3
15. Боковая поверхность прямой призмы
Центр тяжести поверхности совпадает с центром тяжести
периметра среднего сечения, перпендикулярного к ребрам.
16. Боковая поверхность пирамиды
Центр тяжести поверхности совпадает с центром тяжести
периметра сечения, проведенного перпендикулярно к
высоте на расстоянии одной трети от основания
17. Полная поверхность тетраэдра
Центр тяжести поверхности лежит в центре шара, вписанного в тетраэдр, вершины которого находятся в
центрах тяжести граней данного тетраэдра
18. Центр тяжести шарового пояса
На средине стрелки пояса, т. е. отрезка между основаниями пояса перпендикуляра, опущенного на них из
центра шара.
36
Центр тяжести объемов
19. Параллелепипед
Точка пересечения диагоналей.
20. Призма и цилиндр
Средина отрезка, соединяющего центры тяжестей оснований.
21. Пирамида и конус
Центр тяжести объема совпадает с центром тяжести площади сечения,
проведенного параллельно основанию на расстоянии одной четверти высоты от основания.
Центр тяжести тетраэдра лежит на пересечении прямых, соединяющих
вершины с центрами тяжести противоположных граней.
22. Усеченная пирамида с площадью А нижнего основания и площадью В верхнего
Центр тяжести лежит на отрезке, соединяющем центры тяжестей площадей оснований, и делит его в отношении
z A + 3B + 2 AB
,
=
z1 B + 3 A + 2 AB
где z расстояние С от нижнего, а z1 от верхнего основании.
23. Шаровой сектор радиуса R и высоты Н
Центр тяжести лежит на оси симметрии (высоте) на расстоянии
3⎛
H⎞
OC = ⎜ R − ⎟ от центра О шара.
4⎝
2⎠
3
В случае полушария OC = R .
8
24. Сегмент шара радиуса R , высоты Н и радиуса а
основания
Центр тяжести лежит на оси симметрии (высоте) на расстоянии от центра шара
π a4
OC =
,
V
2
1
где V объем сегмента: V = π R 2 H − π a 2 R 2 − a 2 .
3
3
37
3.5. Равновесие тяжелого тела, опирающегося на гладкую горизонтальную плоскость
Если тело опирается на плоскость точками А, А, …, то выпуклый многоугольник, имеющий вершинами некоторые точки опоры и содержащий внутри
себя остальные, называется опорным. При равновесии тела проекция его центра
тяжести должна падать внутрь опорного многоугольника или, в крайнем случае, на его периметр. Если к опирающемуся на горизонтальную плоскость телу
(рис. 31), кроме веса Р, приложена еще сила Q, лежащая в одной плоскости с Р
и стремящаяся опрокинуть тело вокруг ребра
АА, то для равновесия должно выполняться условие
M AA ( P) > M AA (Q) ,
(50)
или, обозначая плечи сил Р и Q через р и q,
должно быть Рр > Qq.
Произведение Рр называется моментом
устойчивости, а произведение Qq опрокидывающим моментом.
Рис. 31
3.6. Трение
Трение скольжения и трение покоя. Сила трения – самая сложная из
всех сил. Она зависит от материала тел, состояния их поверхностей, наличия
смазки между ними или клея, химической активности и т. д. Сила трения сложным образом зависит от скорости движения тел, силы, прижимающей тела друг
к другу, и даже от предыстории.
Ограничимся рассмотрением упрощенной модели трения. Основные положения:
1. Сила трения всегда направлена против перемещения тел или их возможного перемещения в случае покоя.
Fтр
2. Существуют две характерные области – до порога (тело покоится)
kF┴
и после порога (тело движется), в
которых величину силы можно задать равенствами:
⎧⎪ F|| , F|| ≤ kF⊥ ;
(51)
FTP = ⎨
0
kF┴
F║
⎪⎩kF⊥ , F|| > kF⊥ .
Рис. 32
Здесь k – коэффициент трения; F┴
– сила нормального давления, а F║ – сила, вызывающая движение. Таким образом, сила трения определяется двумя
разными формулами – для покоящегося и для скользящего состояний. График
38
ее представлен на рис. 32.
Задача 16 «Альпинист в трещине». Стержень длины l опирается концами
на две вертикальные стены, расстояние между которыми равно d (d < l). Одна
из них абсолютно гладкая, а вторая – шероховатая с коэффициентом трения k
(рис. 33). Найти минимальное значение коэффициента трения k, при котором
возможно равновесие.
Решение. Равенство нулю вертикальных
NA
и горизонтальных сил дают
A
F = P; NA = NB = N.
Точка В будет неподвижна при условии
F < kN.
l
F
Добавим уравнение моментов сил (относительно точки В):
Pd/2 – Nh = 0,
P
2
2
где h = l − d – плечо силы, действующей в
NB
B
точке А. Подстановка значений дает неравенство P < kPd/(2h), или окончательно
d
k > 2h / d = 2 ( l / d ) 2 − 1 .
Рис. 33
Задача 17. Однородный прямолинейный
стержень АВ весом Q (рис. 34, а) опирается в точке В на шероховатую вертикальную стену. Коэффициент трения между стержнем и стеной равен f. В точке
А стержень опирается на горизонтальный гладкий пол. Стержень удерживается
в равновесии нитью AD, перекинутой через блок D. К концу нити подвешен
груз Р. Определить пределы, в которых можно изменять величину груза Р, чтобы не нарушить равновесия стержня.
Решение. Рассмотрим равновесие стержня АВ. На него действует одна ак-
Рис. 34
тивная сила, вес стержня Q, приложенный посредине стержня в точке С и направленный по вертикали вниз. На стержень наложены три связи: горизонтальный пол, вертикальная стена и нить AD. На основании закона освобождаемости
от связей отбросим мысленно связи и заменим их действие реакциями. Реакция
гладкого пола NA направлена перпендикулярно к полу, натяжение нити Р на39
правлено по горизонтали вправо, реакция шероховатой вертикальной стены
может быть представлена двумя составляющими: нормальной реакцией N, направленной по горизонтали влево, и силой трения FB. Сила трения направлена
по вертикали: 1) в случае, когда груз Р наименьшей величины и, следовательно,
возможное направление движения точки А влево, а точки В вниз; сила трения
FВ направлена вверх (рис. 34, б), в сторону, противоположную возможному
движению; 2) в случае, когда груз Р наибольшей величины, точка А может начать двигаться вправо, а точка В скользить по стене вверх и, следовательно, сила трения FВ (рис. 34, в) направлена по вертикали вниз, опять-таки в сторону,
противоположную возможному движению.
Рассматривая равновесие стержня АВ как свободного твердого тела, находящегося под действием пяти сил: Q, NA, NВ, FВ, Pmin (рис. 34, б), найдем минимальное значение веса груза Pmin. Выберем оси координат: ось х направляем
по горизонтали вправо, ось у – вертикально вверх. Составим уравнения равновесия:
ΣF = P – N = 0;
ΣF = N + F – Q = 0;
kx
∑M
ky
B
min
A
В
(Fk ) = Pmin l sin α + 0.5Ql cos α − N Al cos α = 0 .
Через l в последнем уравнении обозначена длина стержня АВ. Кроме того, напишем зависимость силы трения от нормального давления FB = f NB.
Задача является статически определенной, так как система из четырех
уравнений содержит четыре неизвестных: NA, FB, NB, Pmin. Решая совместно эту
систему уравнений, находим искомое минимальное значение величины груза Р:
Q
.
Pmin =
2(tan α + f )
Для определения наибольшей величины груза Р рассмотрим равновесие
стержня АВ (рис. 33, в) как свободного твердого тела, находящегося под действием пяти сил: Q, NA, NВ, FВ, Pmax. Тогда уравнения равновесия имеют вид:
B
ΣF = P – N = 0;
ΣF = N – F – Q = 0;
kx
∑M
ky
B
max
A
В
(Fk ) = Pmax l sin α + 0.5Ql cos α − N Al cos α = 0 .
Решая совместно эту систему уравнений, находим наибольшую величину
груза Р, при которой стержень будет в равновесии:
Q
.
Pmax =
2(tan α − f )
Из уравнения следует, что Рmax
неограниченно возрастает, если
tan α → f . При tan α < f для подъема стержня (скольжения точки В вверх по
стене) необходимо, чтобы сила Q была направлена вверх по вертикали, что невозможно. Таким образом, в этом случае не существует силы Pmax, которая могB
40
ла бы нарушить равновесие лестницы.
Таким образом, равновесие стержня возможно при изменении веса груза Р в
пределах
Q
Q
.
≤P≤
2(tan α + f )
2(tan α − f )
Трение качения. Если приложить к оси катка силу S (рис. 35), стремящуюся двигать его по плоскости, то между катком и поверхностью, на которой
он находится, возникает момент сил трения качения. Известно, что при изменении величины вынуждающей силы S от нуля до некоторого предельного значения Sпр каток остается в покое и начинает движение
только при условии S > Sпр. Происхождение этих сил связано с
деформацией катка и поверхности
С
в области касания, что приводит к
возникновению силы реакции R в
Рис. 35
Рис. 36
точке С, смещенной от вертикали
на некоторое расстояние fК (рис. 35).
Разложим реакцию плоскости R на две составляющие: нормальную N и
касательную реакцию F, являющуюся обычной силой трения (рис. 36). В состоянии покоя катка к нему будут приложены две взаимно уравновешивающие
пары: одна пара сил (S, F) с моментом rS (где r – радиус катка) и вторая пара
сил (N, Р), удерживающая каток в равновесии. Момент этой пары, называемый
моментом трения качения, достигает своего максимального значения
(52)
Mтр= fK N,
когда каток приходит в движение. Итак, момент сил трения качения равен моменту вынуждающей силы rS до тех пор, пока он меньше предельного значения
(52) (при этом каток неподвижен), достигает его с началом движения и остается
равным ему при движении катка.
Получим теперь условие чистого качения (без проскальзывания). Из равенства моментов двух пар находим предельную величину силы:
Sпр = F = fK N/r.
(53)
Для того чтобы качение началось раньше скольжения, необходимо выполнение условия F < fN, где f – коэффициент трения скольжения.
Таким образом, чистое качение без скольжения будет, если
f > fK /r.
(54)
Задача 18. С какой силой надо толкать вагон весом P, чтобы стронуть его
с места? Коэффициент трения качения fK , радиус колес r.
Решение. Как следует из формулы (53), эта сила во столько раз меньше
веса вагона, во сколько раз коэффициент трения качения меньше радиуса колес:
41
S/P = fK /r. Подумайте, как эта сила зависит от числа колес вагона.
Задача 19. Цилиндрический каток радиусом r и весом Q (рис. 37, а) удерживается в равновесии на наклонной плоскости, составляющей угол α с горизонтом, гибкой нитью, перекинутой через блок А, к концу которой подвешен
груз весом Р. Коэффициент трения качения катка равен fK. Определить наименьшую и наибольшую величины веса Р, при которых каток будет в равновесии. Найти наименьшее значение коэффициента трения скольжения f, при котором в случае движения каток будет катиться без скольжения.
Решение. Рассмотрим равновесие катка в двух случаях. В первом случае,
a
б
у
в
Pmin
Pmax
Рис. 37
когда величина Р имеет наименьшее значение, возможное направление движения катка по наклонной плоскости – вниз (рис. 37, б). Точка С, где приложена
реакция плоскости, в этом случае смещена на расстояние fK влево от перпендикуляра, опущенного из центра катка О на наклонную плоскость. К катку приложены две активные силы: вес Q и натяжение нити Pmin. Отбрасывая мысленно связь, наложенную на каток (наклонную плоскость), заменяем ее действие
реакцией, которую раскладываем на нормальную составляющую N и касательную составляющую (силу трения F). Составляющая N перпендикулярна к наклонной плоскости, сила трения направлена вдоль наклонной плоскости в сторону, противоположную предполагаемому движению центра катка.
Рассмотрим равновесие катка как равновесие свободного твердого тела,
находящегося под действием четырех сил: Q, Pmin, N, F. Так как по условию
требуется найти только минимальное и максимальное значения силы Р при
равновесии, то из трех уравнений равновесия составим одно уравнение, выражающее равенство нулю суммы моментов всех сил относительно точки С:
∑ M C (Fk ) = − f K Q cosα + (Q sin α − Pmin )r = 0 .
В это уравнение не вошли неизвестные силы N и F, так как они приложены в точке С. При составлении уравнения мы разложили силу Q на две составляющие: Q cos α – направленную перпендикулярно к наклонной плоскости
(плечо этой составляющей относительно точки С равно коэффициенту трения
качения fK), и составляющую Q sin α , параллельную наклонной плоскости и отстоящую на расстояние r от нее. Решая уравнение, имеем
42
fK
cos α ) .
r
Рассмотрим теперь второй случай, когда сила Р достигает максимального
значения, при котором возможно равновесие. В этом случае возможное направление движения катка – вверх по наклонной плоскости (рис. 37, в). Силы Q и
Pmax направлены аналогично первому случаю и приложены по-прежнему в центре катка О. Реакция наклонной плоскости на этот раз приложена в точке С1,
смещенной на расстояние fК вправо по наклонной плоскости.
Составляем уравнение моментов относительно точки С1:
∑ M C1 (Fk ) = f K Q cosα + (Q sin α − Pmin )r = 0 ,
откуда имеем
f
Pmax = Q(sin α + K cos α ) .
r
Таким образом, каток будет находиться в равновесии на наклонной плоскости, если значение силы Р лежит в пределах
f
f
Q(sin α − K cos α ) ≤ P ≤ Q(sin α + K cos α ) .
r
r
Перейдем к определению наименьшего значения коэффициента трения
скольжения f, при котором в случае движения цилиндр будет катиться, а не
скользить. Рассмотрим вначале случай, когда вес груза Р имеет наименьшее
значение.
Приравняем нулю суммы проекций всех сил на ось х, параллельную наклонной плоскости, и на ось у, перпендикулярную к ней (рис. 37, б):
Pmin = Q(sin α −
Pmin + F − Qs in α = 0 ;
N − Q cos α = 0 .
Подставляя в первое уравнение значение Рmin, находим силу трения при
качении
f
F = K Q cos α
r
и силу нормального давления, равную силе нормальной реакции
N = Q cos α .
Условием, при котором будет чистое качение, является F < fN . Внося в него
значения F и N, находим
f K < fr .
(*)
Рассмотрев далее случай, когда вес груза Р имеет наибольшее значение
(рис. 37, в), мы приходим к такому же условию качения без проскальзывания.
Таким образом, условие (*) является необходимым и достаточным для того, чтобы имело место качение без скольжения по плоскости, наклонной или
горизонтальной – все равно.
43
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Никитин Н. Н. Курс теоретической механики. – М.: Высш. шк., 2003. – 719 с.
2. Тарг С. М. Краткий курс теоретической механики. – М.: Высш. шк., 2006. –
416 с.
3. Бутенин Н. В. Курс теоретической механики. – М.: Лань, 2004. – Т. 1, 2.
– 736 с.
4. Мещерский И. В. Сборник задач по теоретической механике. – М.: Лань, 2006. –
448 с.
5. Полянин А. Д., Попов В. А., Полянин В. Д. Справочник для студентов технических вузов. – М.: АСТ, 2005. – 735 с.
6. Лойцянский Л. Г., Лурье А. И. Курс теоретической механики: В 2 т. – М.:
Дрофа, 2006. – 719 с.
7. Примеры и задачи в теоретической механике: В 2 ч. / Ред. В. Д. Кухарь. –
М.: АСВ, 2004. – Ч. 1. – 192 с.
8. Бать М. И., Джанелидзе Г. Ю., Кельзон А. С. Теоретическая механика в примерах и заданиях. – М.: Наука. 1973. – Т. 1. – 488 с.
9. Васильева Г. В., Мельников А. И. Статика: Задания для курсовых и контрольных работ по теоретической механике. – Екатеринбург, УрГУПС, 1998. –
13 с.
10. Статика-2: Сб. заданий для контрольных и курсовых работ по курсу теоретической механики / Г. В. Васильева, Г. И. Дубровина, А. И. Мельников и др.
– Екатеринбург, УрГУПС, 2000. – 12 с.
11. Принцип возможных перемещений / Г. В. Васильева,
Г. И. Дубровина и др. – Екатеринбург: УрГУПС, 2000. – 23 с.
Б. М. Готлиб,
12. Бертяев В. Д. Теоретическая механика на базе Mathcad. – М.: ВНУ, 2005. –
752 с.
44
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ .................................................................................................................. 4
1. СТАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ ............................................................... 5
1.1.
1.2.
1.3.
1.4.
СИЛА И ЕЕ ВЕКТОР ............................................................................................. 5
УРАВНОВЕШЕННЫЕ НА ТОЧКЕ СИЛЫ ................................................................. 7
РАВНОВЕСИЕ ТОЧКИ НА ГЛАДКОЙ ПОВЕРХНОСТИ И ГЛАДКОЙ ЛИНИИ.............. 8
МОМЕНТ СИЛЫ ................................................................................................ 10
2. СТАТИКА ТВЕРДОГО ТЕЛА ............................................................................. 11
2.1
2.2
2.3
2.4
2.5
2.6
СВОЙСТВА ВНЕШНИХ СИЛ, ПРИЛОЖЕННЫХ К ТВЕРДОМУ ТЕЛУ ...................... 11
ОБЩИЕ УРАВНЕНИЯ РАВНОВЕСИЯ И ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА ................... 13
СХОДЯЩИЕСЯ СИЛЫ ........................................................................................ 15
ПАРЫ СИЛ ........................................................................................................ 17
УРАВНЕНИЯ РАВНОВЕСИЯ ТЕЛА ...................................................................... 18
РАВНОДЕЙСТВУЮЩАЯ СИСТЕМА СИЛ. ПРИВЕДЕНИЕ К ДАННОМУ ЦЕНТРУ .. 23
3. РАВНОВЕСИЕ СИСТЕМЫ ТЕЛ ........................................................................ 25
РЕАКЦИИ СОЕДИНЕНИЙ ТВЕРДЫХ ТЕЛ ............................................................. 25
ПЛОСКАЯ СИСТЕМА СИЛ .................................................................................. 28
ПАРАЛЛЕЛЬНЫЕ СИЛЫ ..................................................................................... 32
ЦЕНТР ТЯЖЕСТИ .............................................................................................. 33
РАВНОВЕСИЕ ТЯЖЕЛОГО ТЕЛА, ОПИРАЮЩЕГОСЯ НА ГЛАДКУЮ
ГОРИЗОНТАЛЬНУЮ ПЛОСКОСТЬ ............................................................................... 38
3.6. ТРЕНИЕ............................................................................................................. 38
3.1.
3.2.
3.3.
3.4.
3.5.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК...................................................................... 44
45
Владимир Иосифович Гребенников
РАВНОВЕСИЕ ТВЕРДЫХ ТЕЛ
Учебно-методическое пособие по курсу «Теоретическая
механика» для студентов всех специальностей дневной и
заочной форм обучения
Редактор В. П. Вовчек
620034, Екатеринбург, ул. Колмогорова, 66, УрГУПС
Редакционно-издательский отдел
_________________________________________________________________
Бумага писчая № 1
Подписано в печать
Усл. печ. л. 2,9
Тираж 200 экз.
Формат 60×84 1/16
Заказ
_________________________________________________________________
46