Упругопластический изгиб балки из линейно упрочняющегося
реклама

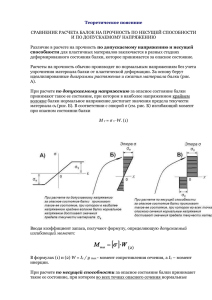
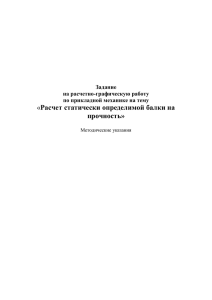
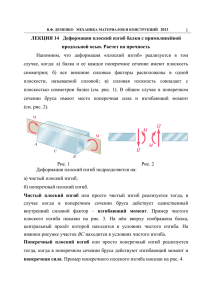
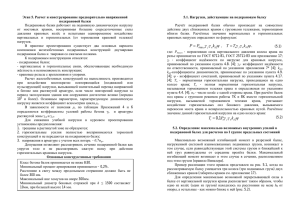
УПРУГОПЛАСТИЧЕСКИЙ ИЗГИБ БАЛКИ ИЗ ЛИНЕЙНО УПРОЧНЯЮЩЕГОСЯ МАТЕРИАЛА А. Х. Валиуллин Казанский государственный технологический университет, Казань, Россия На рис. 1 σ приведены результаты F, кН 15 испытания на растяжение образца 800 МПа а σв 500 10 0,97 б в σт 250 5 Δl, мм εт 10 0,1 εв 20 0,2 ε Рис. 1 малоуглеродистой стали: а – машинная диаграмма, б – истинная диаграмма растяжения до начала образования шейки, в – расчетная диаграмма, соответствующая модели упругопластического тела с линейным упрочнением. Основные характеристики материала: предел текучести Т 300 МПа , «предел прочности», значение которого принято равным истинному напряжению непосредственно перед началом образования шейки, В 600 МПа , деформации, соответствующие пределам текучести и прочности: Т 0,0015 и В 0,192 . Диаграмма сжатия предполагается такой же. Состояние, при котором напряжения в крайних точках сечения равны пределу прочности, а вблизи нейтральной оси пределу текучести, назовем предельным состоянием. Эпюра напряжений для предельного состояния показана на рис. 2, значение предельного изгибающего момента в сечении y y определяется по формуле σв M пр 0.5 T В Wx TWx (k 1.5) , где Wx – момент сопротивления изгибу, k B / T 1 1 . x σ σт Найдем зависимость между изгибающим h моментом М и напряжениями по высоте сечения для M T M M пр . M T TWx случая Здесь – b максимальный упругий изгибающий момент. При M M T , когда деформация крайних волокон Рис. 2 max T , а кривизна оси балки T 2T / h , в крайних волокнах появляется текучесть, которая при M M T постепенно проникает вглубь. При произвольном значении max T текучесть наблюдается в точках сечения с ординатой h T y yT . 2 max Принимая гипотезу плоских сечений и подставляя физические соотношения Ey 2Ey max , при y yT , E h T 2 y T B max T , при y yT B T h в интегральную зависимость M ydA , получим следующее уравнение (в безразмерном A виде): 2 3 B T k 1 T k max T E 1 1 m 1,5 max B T max T B T где m M / TWx . 3 T max , max (1) Из этого уравнения при известном значении m итерационным методом Ньютона определяется значение max , затем кривизна оси по формуле 2 max / h (2) и – чисто геометрически, не прибегая к дифференциальному уравнению, находится изогнутая ось балки. Решены задачи чистого, поперечного и продольно-поперечного изгиба балки. 1. Чистый изгиб. В этом случае кривизна, определяемая формулой (2), постоянна, поэтому решение сводится к построению дуги окружности радиусом 1/ и длиной, равной длине балки. Выполнены расчеты при различных значениях момента и относительной толщины балки. 2. Поперечный изгиб (рис. 3). В уравнении (2) безразмерный момент m заменяется на m z 2 fz / l , где f F / FT , а FT 4 TWx / l . Задача решается численно по такому алгоритму. Задается значение угла поворота на левом краю 0 01 02 / 2, где 01 / 2 и 02 0 – начало и конец возможного диапазона изменения 0 ; задаются начальные значения длины дуги изогнутой оси, абсциссы сечения, Рис. 3 прогиба и угла поворота: s 0, z 0, w 0, 0 ; затем длине дуги дается приращение s и вычисляются новые значения z , w : z z s cos 0 , w w s sin 0 . Здесь же определяется значение m( z ) 2 fz / l , после чего из уравнения (1) находится max и кривизна – по формуле (2), затем угол поворота в конце первого шага s . Так расчет продолжается до достижения середины балки. Проверяется условие симметричности изогнутой оси: в середине балки угол поворота должен быть равен нулю. Если это условие с заданной точностью выполнено, то расчет прекращается, и выдаются на печать результаты; если условие не выполнено, то производится корректировка граничного условия на левом краю: если 0, то изменяется нижняя граница начального угла поворота 01 , и, наоборот, если 0, то 02 ; вычисляется новое значение начального угла поворота 0 01 02 / 2 . На рис. 3 показаны также результаты расчета – эпюры прогибов в масштабе балки для различных значений силы, а на рис. 4 приведена диаграмма «сила – прогиб», на которой точками показаны результаты наших первых экспериментов. 3. Продольно-поперечный изгиб возникает в случае, когда балка лежит на двух цилиндрических неподвижных опорах, позволяющих изгибаемой балке соскальзывать по направлению касательной к оси балки в точках опирания (рис. 5). Расчет ведется аналогично п. 2 со следующими отличиями: первой прирастающей величиной является не s, а z, и изгибающий момент вычисляется по формуле m z 2 f z wtg0 / l . f 3 l 210 мм h 8 мм 2 1 wmax , cм 1 2 3 4 5 Рис. 4 Рис. 5 На рис. 5 изображены изогнутые оси в упругом и пластическом состоянии, которое наступает резко, так в рассматриваемом случае скачок происходит от w 10,36 мм при f 1, 26 до w 64,9 мм при f 1, 26213 .